Область техники, к которой относится изобретение
Настоящее изобретение относится к системе и способу медицинской визуализации для предоставления представления изображения, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах, в частности, подходящим для флуороскопических направленных вмешательств, к примеру операций абляции для исключения фибрилляции предсердий.
Уровень техники
Электрофизиология является конкретной областью интервенционной кардиологии, в которой врачи используют инфракрасные сердечные катетеры для того, чтобы находить и лечить электрические дисфункции сердечного ритма, согласно данным рентгеновской флуороскопии. Сложная электрофизиологическая операция представляет собой радиочастотную абляцию для лечения фибрилляции предсердий. Электрофизиологам требуется специальная подготовка для того, чтобы идеально знать анатомию и пути доступа ко всем обследуемым участкам, а также некоторая практика для того, чтобы выбирать корректные устройства и управлять ими с требуемой целью. Анатомия пациента может записываться с помощью устройств трехмерной визуализации, например через CT или MRI либо посредством впрыскивания контрастного средства локально только в начале вмешательства, например, в левое предсердие и в отверстие легочных вен для фибрилляции предсердий либо в коронарные вены и в синус для терапии для восстановления сердечной деятельности. Врач по существу должен выполнять мысленную регистрацию для того, чтобы выполнять навигацию по передаваемым в реальном времени флуорографическим изображениям, когда структурная информация более не является видимой. Для операций для исключения фибрилляции предсердий, знание точных позиций катетеров при измерении электрических потенциалов является ключевым для того, чтобы обнаруживать источники, которые вызывают фибрилляцию, например эктопические очаги или циркуляционный контур. Еще большую важность представляет составление анатомической карты участков абляции для того, чтобы выполнять требуемые шаблонные действия при абляции, такие как изоляция легочной вены либо абляция по линии верхней стенки в левом предсердии.
Отслеживание стороннего объекта, такого как хирургический инструмент или видимый анатомический ориентир, является обязательным в интервенционных рентгеновских лучах, если требуется компенсировать движение обследуемой анатомической области, например камеры сердца или коронарного синуса, если упомянутый орган является по большей части невидимым.
Тем не менее взаимосвязь между движением отслеживаемого хирургического инструмента и частью анатомической области, которая представляет собой интерес для электрофизиологического вмешательства, может быть сложной. В области грудной клетки, например, движение хирургического инструмента главным образом обусловлено посредством двух факторов, сердечного сокращения и движения при дыхании.
Поскольку в области грудной клетки эти два различных источника движения осуществляют свои действия по-разному, можно считать необходимым разделять эти источники движения. Известные меры для разделения различных источников движения, причем эти источники движения образуют движения с различными диапазонами частот, основаны на фильтрации всего движения отслеживаемых объектов для того, чтобы восстанавливать движение, исходящее из любого источника. Тем не менее фильтрация может приводить к задержкам, которые изменяют качество компенсации движения. Кроме того, результат фильтрации может быстро ухудшаться, когда снижается частота обновления изображения флуороскопии.
Другая известная мера состоит в использовании временной модели одного (или нескольких) источников движения. Временные модели затем приспосабливаются к записанному движению. Это может не обеспечивать достаточную гибкость для обработки очень большой вариативности движения, например аритмии касательно движения при сердечной деятельности или дыхании.
Сущность изобретения
Следовательно, может возникнуть потребность в надежной системе и способе медицинской визуализации, реализующих представление изображения обследуемой анатомической области, поддерживающее точное направление хирургического инструмента, вставленного в сосуд, причем этот сосуд подвержен принудительному движению, вызываемому посредством, по меньшей мере, двух различных источников движения. Решение проблемы изменения ритма и частоты кадров должно быть надежным.
Эта потребность может удовлетворяться с помощью предмета независимых пунктов формулы изобретения. Дополнительные варианты осуществления изобретения задаются в зависимых пунктах формулы изобретения.
Согласно аспекту настоящего изобретения предлагается система медицинской визуализации для предоставления представления изображения обследуемой анатомической области, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах. Система медицинской визуализации выполнена с возможностью осуществлять следующие этапы, предпочтительно, но не только, в указываемом порядке:
(i) получение первой последовательности изображений обследуемой области сосудов с помощью хирургического инструмента, вставленного в обследуемую область сосудов в течение временного интервала без первого движения пациента;
(ii) определение последовательности первого движения для периодического движения хирургического инструмента в течение цикла второго движения посредством анализа движения хирургического инструмента в первой последовательности обнаруженных изображений;
(iii) создание модели движения хирургического инструмента, обусловленной исключительно вторым движением;
(iv) определение оператора, задающего взаимосвязь между последовательностью первого движения хирургического инструмента и вторым движением;
(iv) получение передаваемых в реальном времени изображений обследуемой области сосудов с помощью хирургического инструмента, вставленного в обследуемую область сосудов пациента;
(v) вычитание движения хирургического инструмента, обусловленного вторым движением, с использованием оператора и определение движения хирургического инструмента, обусловленного первым движением пациента; и
(vi) регистрация представления обследуемого объекта на основе первого движения.
Согласно изобретению состояние различных источников движения, присутствующих, например, в качестве движения при сердечной деятельности и дыхательного движения, восстанавливается посредством оценки фактической формы хирургического инструмента, реализованного в качестве одного или нескольких сторонних объектов, и логического выведения позы другого обследуемого объекта, типично камеры сердца, на основе релевантного движения.
В основе изобретения лежит такое допущение, что различные источники движения деформируют форму хирургического инструмента по-разному, так что соответствующее влияние этих источников на движение может восстанавливаться однозначно. Посредством использования одной или нескольких моделей движения, движение, обусловленное различными факторами, затем может логически выводиться и распространяться на другие объекты, такие как обследуемая анатомическая область. В отличие от существующих технологий, ключевое преимущество этого подхода заключается в отсутствии зависимости результатов от частоты кадров и в способности формировать оценку позиции обследуемой анатомической области без задержки во времени.
Получение первого набора изображений обследуемой анатомической области может осуществляться посредством устройства рентгеновской визуализации, которое позволяет предоставлять последовательность следующих друг за другом двумерных изображений. Хирургический инструмент может содержать один или несколько отличительных признаков или ориентиров, которые подходят для распознавания в рентгеновском изображении в целях задания модели хирургического инструмента и дополнительно для определения последовательности первого движения для движения хирургического инструмента, обусловленного вторым источником движения, которое может быть циклическим, но не обязательно периодическим, например движением при сердечной деятельности. Задание модели для хирургического инструмента может осуществляться посредством регрессии или других применимых способов.
Для задания взаимосвязи между вторым источником движения, влияющим на форму хирургического инструмента, и состоянием самого хирургического инструмента задание модели движения является обязательным. Такая модель движения может задаваться в качестве матрицы или вектора, который может быть умножен на вектор первого источника движения, такой как скаляр первого движения, например, значение радиана повторяющегося движения, для получения позиционного вектора, описывающего позицию хирургического инструмента в зависимости от состояния первого источника движения. В общем, модель движения принимает форму хирургического инструмента в качестве ввода и выводит фазу или смещение через аналитически или экспериментально определенную взаимосвязь. Ввод предпочтительно не должен быть производным, таким как скорость, поскольку в самом базовом режиме модель движения должна быть применимой на основе одного интервала. Кроме того, в последовательностях с низкой частотой кадров скорость фактически не может быть оценена.
Определение оператора в качестве обращенной модели движения может осуществляться посредством транспозиции модели движения хирургического инструмента через удобную функцию транспозиции в зависимости от характера модели движения и ее размерности.
Получение передаваемых в реальном времени флуорографических изображений обследуемой анатомической области с помощью хирургического инструмента, вставленного в обследуемую анатомическую область, необходимо для обеспечения видимости хирургического инструмента, причем этот хирургический инструмент должен направляться в определенную точку, к примеру в левое предсердие. Следует подчеркнуть, что передаваемые в реальном времени изображения могут быть получены без ограничений касательно движения пациента.
На следующем этапе модель движения хирургического инструмента только на основе первого источника движения, например, дыхательного движения осуществляется посредством анализа движения хирургического инструмента согласно первому обучающему этапу, на котором деформации формы обусловлены только посредством второго источника движения. Когда форма хирургического инструмента отслеживается под влиянием как второго источника движения, так и первого источника движения, деформация формы хирургического инструмента, обусловленная вторым источником движения, может вычитаться при использовании оператора в качестве обращенной модели движения, описанной выше. В силу этого может быть получена модель движения в качестве взаимосвязи между первым источником движения и движением хирургического инструмента.
Эта взаимосвязь помогает в регистрации ранее обнаруженного изображения обследуемой анатомической области и передаваемых в реальном времени флуорографических изображений на основе, в частности, дыхательного движения. Это может быть полезно, поскольку, например, движение левого предсердия практически не зависит от второго источника движения, в частности движения при сердечной деятельности, но серьезно зависит от вдоха/выдоха.
Формально существуют  источников и
источников и  объектов, которые отслеживаются во времени. Каждый источник и объект однозначно описываются посредством состояния, которое помечено соответственно как
объектов, которые отслеживаются во времени. Каждый источник и объект однозначно описываются посредством состояния, которое помечено соответственно как  и
и  и которое может быть или не быть многомерным. Далее предполагается, что состояния 7) объектов зависят только от состояний источников движения, т.е.:
и которое может быть или не быть многомерным. Далее предполагается, что состояния 7) объектов зависят только от состояний источников движения, т.е.:
где  представляет модель движения. Дополнительно предполагается, что это действие является обратимым при знании состояния всех объектов, т.е. что для каждого источника существует такой оператор:
представляет модель движения. Дополнительно предполагается, что это действие является обратимым при знании состояния всех объектов, т.е. что для каждого источника существует такой оператор:
Состояние A обследуемого объекта, так же при условии, что оно зависит только от , затем восстанавливается посредством следующего:

при условии модели  движения. Может быть возможно то, что сама обследуемая анатомическая область учитывается в хирургических инструментах, если ее наблюдаемое состояние так или иначе является недостаточным и должно дополняться посредством наблюдения других хирургических инструментов или другого стороннего объекта.
движения. Может быть возможно то, что сама обследуемая анатомическая область учитывается в хирургических инструментах, если ее наблюдаемое состояние так или иначе является недостаточным и должно дополняться посредством наблюдения других хирургических инструментов или другого стороннего объекта.
Обучение моделей обязательно является конкретным для варианта применения. Модели либо могут быть универсально применимыми, либо им требуется конкретное для пациента обучение.
Предложенная система медицинской визуализации может применяться в лабораторных системах для рентгенографической катетеризации, потенциально используемых в окружении операционной. Кроме того, она также может быть использована в других случаях, когда поддержка направления может быть значимой. Другие варианты применения, в которых может быть использовано это изобретение, представляют собой минимально-инвазивную хирургию, в которой определение местоположения хирургических инструментов, таких как биопсийные иглы, представляет значительный интерес.
Согласно дополнительному аспекту настоящего изобретения, предлагается компьютерная программа или компьютерный программный элемент, который отличается как выполненный с возможностью осуществлять этапы способа, как задано выше, относительно предложенного устройства медицинской визуализации при выполнении на надлежащем вычислительном устройстве или программируемой системе. Фактически, вычислительное устройство или программируемая система, в которой выполняется такая компьютерная программа и которая дополнительно содержит, например, соответствующие интерфейсы, процессоры и запоминающее устройство для получения соответствующих данных анатомического представления и данных рентгеновских изображений в качестве ввода для последующей обработки данных для предоставления регистрации в форме анатомической ангиограммы, регистрации в форме флуорографической ангиограммы и, наконец, регистрации в форме анатомической флуорограммы, может работать в качестве вышеприведенного устройства медицинской визуализации.
Согласно дополнительному аспекту настоящего изобретения, представляется машиночитаемый носитель, такой как CD-ROM, при этом машиночитаемый носитель имеет сохраненную компьютерную программу, как описано в предыдущем разделе. Тем не менее компьютерная программа также может быть представлена по сети и может загружаться в оперативное запоминающее устройство процессора данных из этой сети. Соответственно, машиночитаемый носитель может быть носителем для обеспечения доступности компьютерной программы для загрузки.
Следует отметить, что признаки и преимущества вариантов осуществления изобретения описаны в данном документе в отношении различных предметов изобретения. В частности, некоторые варианты осуществления описываются относительно признаков типа способа, тогда как другие варианты осуществления описываются относительно признаков типа устройства. Тем не менее специалисты в данной области техники должны понимать из вышеприведенного и последующего описания, что если не указано иное, в дополнение к любой комбинации признаков, принадлежащих одному типу предмета изобретения, также любая комбинация между признаками, связанными с различными предметами изобретения, считается раскрытой в этой заявке. В частности, функции могут комбинироваться, обеспечивая синергические эффекты, которые превышают простую сумму признаков.
Краткое описание чертежей
Признаки и варианты осуществления, заданные выше, и дополнительные признаки и преимущества настоящего изобретения также могут быть извлечены из примеров вариантов осуществления, которые описаны в данном документе ниже и поясняются в отношении примеров вариантов осуществления, но изобретение не ограничено ими. Далее изобретение подробнее описывается со ссылкой на чертежи.
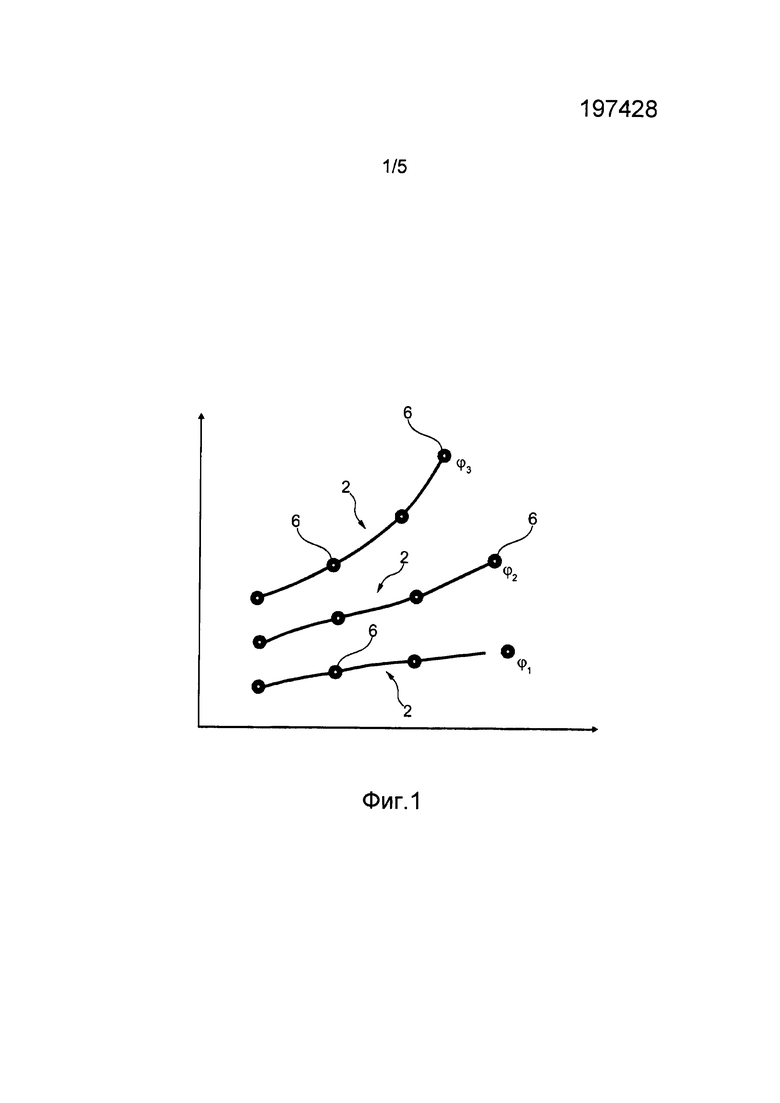
Фиг.1 показывает общее представление деформаций формы хирургического инструмента в ходе полного цикла сердечной деятельности.
Фиг.2 показывает позицию обследуемой анатомической области относительно хирургического инструмента в данной фазе.
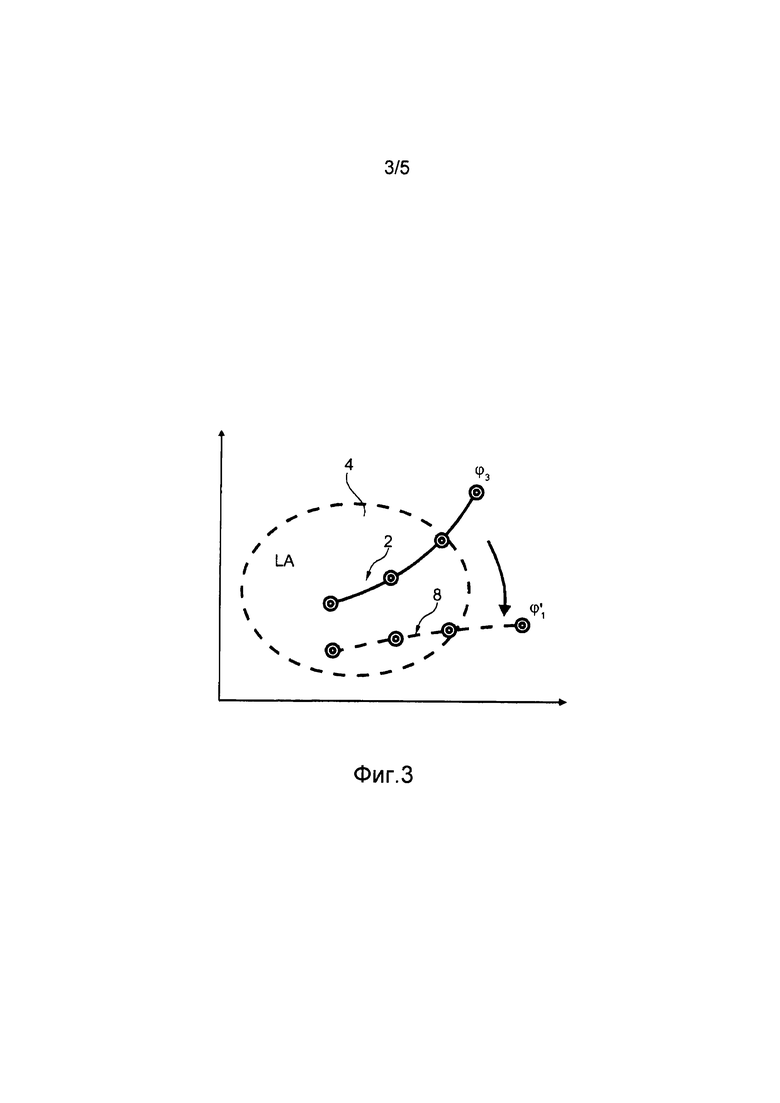
Фиг.3 показывает оцененную позицию обследуемой анатомической области относительно хирургического инструмента в другой фазе.
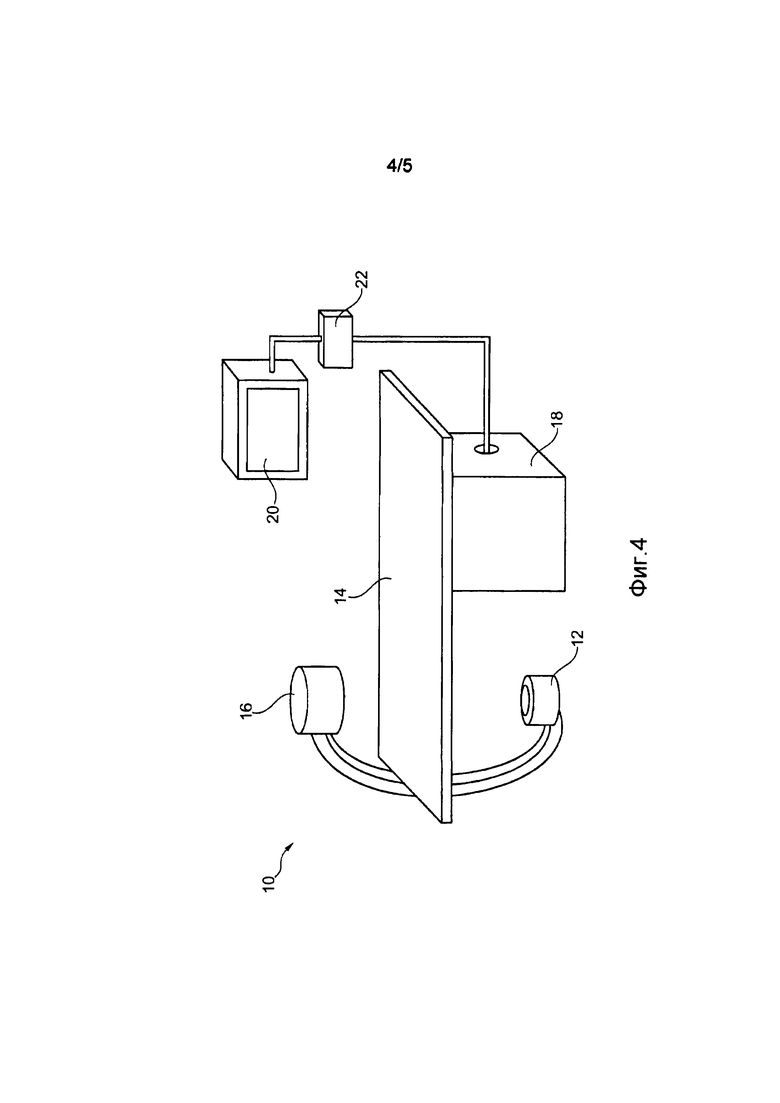
Фиг.4 показывает общее представление системы медицинской визуализации согласно изобретению.
Фиг.5 показывает схематическое общее представление способа согласно изобретению.
Чертежи являются схематичными и не нарисованы в масштабе.
Подробное описание вариантов осуществления
Фиг.1 показывает общее представление деформаций формы хирургического инструмента в ходе полного цикла сердечной деятельности. Хирургический инструмент 2 показывается для трех различных фаз  и
и  цикла сердечной деятельности, при этом две из этих фаз могут получаться посредством синхронизированного инициирования по концу диастолического цикла (EoD) и концу систолического цикла (EoS). Хирургический инструмент 2 может быть реализован в качестве катетера для коронарного синуса (CSC), который обычно используется для закупорки коронарного синуса для дозирования кардиоплегических растворов, а также для мониторинга давления коронарного синуса в ходе кардиопульмонального шунтирования. Для вариантов применения в электрофизиологии катетер для коронарного синуса содержит электроды 6 на наконечнике, которые могут быть использованы в качестве четко видимых ориентиров для деформации формы, до которой может быть уменьшена форма хирургического инструмента.
цикла сердечной деятельности, при этом две из этих фаз могут получаться посредством синхронизированного инициирования по концу диастолического цикла (EoD) и концу систолического цикла (EoS). Хирургический инструмент 2 может быть реализован в качестве катетера для коронарного синуса (CSC), который обычно используется для закупорки коронарного синуса для дозирования кардиоплегических растворов, а также для мониторинга давления коронарного синуса в ходе кардиопульмонального шунтирования. Для вариантов применения в электрофизиологии катетер для коронарного синуса содержит электроды 6 на наконечнике, которые могут быть использованы в качестве четко видимых ориентиров для деформации формы, до которой может быть уменьшена форма хирургического инструмента.
Три различных деформации формы на фиг.1 записываются в течение, по меньшей мере, одного цикла сердечной деятельности, когда пациент не проводит дыхательное движение. Случай цикла сердечной деятельности может автоматически быть определен посредством анализа движения хирургического инструмента 2, поскольку он по существу осуществляет повторяющееся движение. Состояние сердца в течение цикла сердечной деятельности может быть представлено посредством переменной  , поскольку движение является циклическим. Кроме того, это состояние может быть пропорциональным времени.
, поскольку движение является циклическим. Кроме того, это состояние может быть пропорциональным времени.
Определение взаимосвязи между деформацией формы и циклом сердечной деятельности или смещением в цикле сердечной деятельности является ключевым в предложенной системе и способе, поскольку предполагается, что дыхательное движение серьезно влияет на хирургический инструмент 2. Деформация формы, обусловленная циклом сердечной деятельности и дыхательного движения, накладывается и может быть отделена только посредством изолированного определения обусловленного циклом сердечной деятельности движения хирургического инструмента. Оператор H, обеспечивающий состояние S из формы хирургического инструмента 2, может быть определен, например, посредством технологий регрессии для определенного цикла сердечной деятельности с использованием различных признаков формы хирургического инструмента 2, таких как ориентация, кривизна или относительная позиция электродов.
Если можно получать трехмерную позицию электродов из их двумерных проекций, например, с использованием предшествующей анатомической формы и трехмерной модели хирургического инструмента, трехмерная позиция электродов 6 в качестве состояния хирургического инструмента 2 по всему сердечному циклу может распознаваться. В противном случае, состояние может быть ограничено двумерной позицией электродов 6 и модель может быть допустимой только до тех пор, пока C-образная рама системы медицинской визуализации согласно изобретению не вращается.
Этот процесс может считаться "обучающей фазой", в ходе которой осуществляется модель движения, задающая взаимосвязь между деформациями формы хирургического инструмента и циклом сердечной деятельности. В силу этого при знании позиции в цикле сердечной деятельности может быть точно определена деформация формы хирургического инструмента.
На фиг.2 показан схематичный вид обследуемой анатомической области. Здесь обследуемой анатомической областью является левое предсердие (LA) 4. Два главных источника движения соответствуют сердечному сокращению (циклу сердечной деятельности) и дыханию (дыхательному движению). Предполагается, что дыхательное движение значительно перемещает как левое предсердие 4, так и хирургический инструмент 2 и что сердечное сокращение не влияет на левое предсердие 4, что представляет собой обоснованное допущение около верхней стенки левого предсердия 4, которая является главной обследуемой областью во время операций абляции.
Компоновка левого предсердия 4 и хирургического инструмента 2 задается посредством времени, в которое получено изображение. Для получения изображения контрастное средство, возможно, применено к пациенту в целях обеспечения видимости левого предсердия 4 в процессе получения рентгеновских изображений. Контрастное средство показывает анатомию левого предсердия 4, и, следовательно, модель или ранее полученное изображение может выдаваться на экране для оператора, вручную или автоматически. Чтобы инициализировать модель в интервале, идентичном интервалу хирургического инструмента 2, требуется только одна фаза движения при сердечной деятельности для того, чтобы обеспечивать надлежащую связь. Полезными фазами для этой задачи являются фазы, которые легко определять автоматически, показывающие крайние позиции в пути хирургического инструмента, например, примерно соответствующие EoD и EoS.
В качестве примера хирургический инструмент 2 имеет позицию  на фиг.2. Поскольку позиция хирургического инструмента 2 относительно левого предсердия 4 известна и модель движения хирургического инструмента 2 определяется, позиция левого предсердия 4 может определяться для любой возникающей сердечной фазы. Следовательно, в новом изображении анализируется форма хирургического инструмента 2, деформированная согласно сердечной фазе.
на фиг.2. Поскольку позиция хирургического инструмента 2 относительно левого предсердия 4 известна и модель движения хирургического инструмента 2 определяется, позиция левого предсердия 4 может определяться для любой возникающей сердечной фазы. Следовательно, в новом изображении анализируется форма хирургического инструмента 2, деформированная согласно сердечной фазе.
С использованием модели движения, изученной выше, может быть определено движение, обусловленное работой сердца. Оставшееся значительное движение после этого полностью приписывается дыхательному движению, в силу этого предоставляя состояние дыхания и, в свою очередь, позицию левого предсердия 4.
В простейшей форме дыхательное движение предположительно представляет собой вертикальное перемещение в пространстве, прикладываемое равномерно к хирургическому инструменту 2 и левому предсердию 4. Следовательно, оставшееся перемещение в пространстве хирургического инструмента 2 после того как факторизуется каждое сердечное сокращение, может непосредственно применяться к модели левого предсердия 4.
Следовательно, после получения изображения левого предсердия 4 и определения модели движения хирургического инструмента 2, позиция левого предсердия 4 без контрастного средства может определяться для всех фаз цикла сердечной деятельности и в ходе дыхательного движения. Относительная позиция левого предсердия 4 может быть сделана видимой для человека, проводящего интервенционный процесс, при регистрации и наложении ранее обнаруженного изображения левого предсердия 4 или модели левого предсердия 4 и передаваемых в реальном времени флуорографических изображений, что приводит к такой фактической форме хирургического инструмента, как проиллюстрировано на фиг.3.
В силу этого обнаруженная форма хирургического инструмента 2 при использовании определенной модели движения из обучающей фазы, как проиллюстрировано на фиг.1, позволяет определять взаимосвязь между дыхательным движением и относительной позицией левого предсердия 4.
Коррекция движения дополнительно может быть проведена посредством оценки формы 8 хирургического инструмента 2 в ходе фазы сердечной деятельности. Например, если фактическая форма хирургического инструмента 2 равна форме согласно фазе  цикла сердечной деятельности, как проиллюстрировано на фиг.1, соответствующая форма хирургического инструмента 2 в фазе
цикла сердечной деятельности, как проиллюстрировано на фиг.1, соответствующая форма хирургического инструмента 2 в фазе  может быть оценена посредством модели движения. Это указывается посредством стрелки, идущей от формы хирургического инструмента 2 при к оцененной форме при , которая может называться
может быть оценена посредством модели движения. Это указывается посредством стрелки, идущей от формы хирургического инструмента 2 при к оцененной форме при , которая может называться  . Эта оценка затем может быть использована для того, чтобы определять позицию левого предсердия 4, как показано на фиг.2.
. Эта оценка затем может быть использована для того, чтобы определять позицию левого предсердия 4, как показано на фиг.2.
Фиг.4 показывает схематическое общее представление системы медицинской визуализации согласно изобретению. Система 10 медицинской визуализации содержит устройство получения рентгеновских изображений с источником 12 рентгеновского излучения, предоставляемым с возможностью формировать рентгеновское излучение. Стол 14 предоставляется с возможностью принимать объект, который должен быть обследован. Дополнительно, модуль 16 определения рентгеновских изображений находится напротив источника 12 рентгеновского излучения. В ходе процедуры излучения анализируемый объект находится между источником 12 рентгеновского излучения и модулем 16 определения. Модуль определения отправляет данные в модуль 18 обработки данных, который соединяется как с модулем 16 определения рентгеновских изображений, так и с источником 12 рентгеновского излучения. Модуль 18 обработки данных может, к примеру, находиться под столом 14 для экономии пространства в помещении для обследования. Очевидно, что он также может находиться в другом месте, к примеру в другом помещении или в другой лаборатории. Кроме того, модуль 20 вывода, в качестве примера, оборудуется дисплеем и, следовательно, может размещаться около стола 14 для выдачи информации человеку, работающему с системой медицинского визуального наблюдения, которым может быть врач, к примеру, врач-кардиолог или кардиохирург. Предпочтительно, дисплей монтируется с возможностью перемещения, чтобы обеспечивать индивидуальное регулирование в зависимости от ситуации обследования. Кроме того, интерфейсный модуль 22 выполнен с возможностью вводить информацию пользователем.
Необязательно использовать автономный модуль 20 вывода, также может быть возможным включать модуль 20 вывода в модуль 18 обработки данных, в котором проводится процесс наложения и комбинирования, и предоставлять в соответствующих портах вывода для дополнительных целей.
По существу, модуль 16 определения изображений формирует изображения посредством подвергания данного объекта действию рентгеновского излучения, при этом упомянутые изображения дополнительно обрабатываются в модуле 18 обработки данных. Следует отметить, что показанный пример представляет собой так называемое устройство получения рентгеновских изображений с C-образной рамой. Устройство получения рентгеновских изображений содержит раму в форме буквы C, при этом модуль 16 определения размещается на одном конце C-образной рамы, а источник 12 рентгеновского излучения находится на противоположном конце C-образной рамы. C-образная рама монтируется с возможностью перемещения и может вращаться вокруг обследуемого объекта, расположенного на столе 14. Другими словами, можно получать изображения с различными направлениями просмотра.
Модуль 18 обработки данных может быть выполнен с возможностью осуществлять способ согласно изобретению и в силу этого может рассматриваться или содержать модуль обработки данных для предоставления представления изображения, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах. В силу этого предоставляются процессор данных и предпочтительно средство хранения для сохранения модели движения хирургического инструмента и модели обследуемого объекта, а также соответствующее программное обеспечение, которое содержит один программный элемент для предоставления представления изображения, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах, согласно примерным вариантам осуществления вышеописанного способа. Программное обеспечение может передаваться в модуль 18 обработки данных посредством машиночитаемого носителя либо через сеть и может быть реализовано в качестве совершенно новой операционной системы или обновления.
Как очевидно из фиг.5, способ согласно настоящему изобретению содержит следующие этапы процесса:
(i) получение 24 первой последовательности изображений обследуемой области сосудов с помощью хирургического инструмента 2, вставленного в обследуемую область сосудов в течение временного интервала без первого движения пациента;
(ii) определение 26 последовательности первого движения для циклического движения хирургического инструмента 2 в течение цикла второго движения посредством анализа движения хирургического инструмента 2 в первой последовательности обнаруженных изображений;
(iii) создание 28 модели движения хирургического инструмента, обусловленной исключительно вторым движением;
(iv) определение 30 оператора, задающего взаимосвязь между последовательностью первого движения хирургического инструмента 2 и вторым движением;
(iv) получение 32 передаваемых в реальном времени изображений обследуемой области сосудов с помощью хирургического инструмента 2, вставленного в обследуемую область сосудов;
(v) вычитание 34 движения хирургического инструмента, обусловленного вторым движением, с использованием оператора, и определение движения хирургического инструмента 2, обусловленного первым движением; и
(vi) регистрация 36 представления обследуемого объекта на основе первого движения.
Следует подчеркнуть, что передаваемые в реальном времени изображения могут быть получены без ограничений касательно движения пациента.
Кроме того, зарегистрированное представление обследуемого объекта может быть наложено 38 на полученное передаваемое в реальном времени изображение и отображено 40.
В завершение следует отметить, что в данном документе слово "содержащее" не исключает другие элементы или этапы и указание на единственность не исключает множественности. Один процессор или другой модуль может выполнять функции нескольких элементов, изложенных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, что комбинация этих мер не может быть использована с выгодой. Все ссылки с номерами в формуле изобретения не должны рассматриваться как ограничивающие объем.
Список позиционных обозначений
2 - хирургический инструмент
4 - левое предсердие (LA)
6 - электрод
8 - форма
10 - система медицинской визуализации
12 - источник рентгеновского излучения
14 - стол
16 - модуль обнаружения
18 - модуль обработки данных
20 - автономный модуль вывода
22 - интерфейсный модуль
24 - получение первой последовательности изображений
26 - определение последовательности первого движения
28 - создание модели движения
30 - определение оператора
32 - получение передаваемых в реальном времени изображений
34 - вычитание движения хирургического инструмента
36 - регистрация представления обследуемого объекта
38 - наложение
40 - отображение
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ С КАРДИО-И/ИЛИ ДЫХАТЕЛЬНОЙ СИНХРОНИЗАЦИЕЙ И СПОСОБ 2-МЕРНОЙ ВИЗУАЛИЗАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ С ДОПОЛНЕНИЕМ ВИРТУАЛЬНЫМИ АНАТОМИЧЕСКИМИ СТРУКТУРАМИ ВО ВРЕМЯ ПРОЦЕДУР ИНТЕРВЕНЦИОННОЙ АБЛЯЦИИ ИЛИ УСТАНОВКИ КАРДИОСТИМУЛЯТОРА | 2009 |
|
RU2529481C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ ДИНАМИЧЕСКОЙ АНАТОМИЧЕСКОЙ СТРУКТУРЫ | 2020 |
|
RU2808612C2 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ В КАРДИОХИРУРГИИ | 2015 |
|
RU2607948C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОСТИ | 2013 |
|
RU2676435C2 |
| КАРТИРОВАНИЕ СОСУДОВ | 2010 |
|
RU2570758C2 |
| УСТРАНЕНИЕ НЕОДНОЗНАЧНОСТИ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ИНТЕРВЕНЦИОННЫХ ИНСТРУМЕНТОВ ИЗ ЕДИНСТВЕННОГО ИЗОБРАЖЕНИЯ В РЕНТГЕНОВСКОЙ ПРОЕКЦИИ И ЕГО КАЛИБРОВКИ | 2010 |
|
RU2575779C2 |
| ДИНАМИЧЕСКАЯ ВИЗУАЛИЗАЦИЯ ИНФОРМАЦИИ О СОСТОЯНИИ КОРОНАРНЫХ СОСУДОВ И ПЕРФУЗИИ МИОКАРДА | 2009 |
|
RU2530665C2 |
| ЦИФРОВАЯ СУБТРАКЦИОННАЯ АНГИОГРАФИЯ С АППАРАТНОЙ КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ | 2015 |
|
RU2710668C2 |
| ВИЗУАЛИЗАЦИЯ ДЛЯ НАВИГАЦИОННОГО УКАЗАНИЯ | 2012 |
|
RU2594811C2 |
| СИСТЕМА И СПОСОБ СОЗДАНИЯ ИНДИВИДУАЛЬНОЙ ДЛЯ ПАЦИЕНТА МОДЕЛИ АНАТОМИЧЕСКОЙ СТРУКТУРЫ НА ОСНОВЕ ЦИФРОВОГО ИЗОБРАЖЕНИЯ | 2012 |
|
RU2642913C2 |


Группа изобретений относится к медицинской технике, а именно к средствам визуализации информации от объекта исследования при хирургической операции на сосудах. Способ предоставления изображения в обследуемой области зависит, по меньшей мере, от первого источника движения, при этом способ содержит этапы, на которых получают первую последовательность изображений обследуемой области сосудов с помощью хирургического инструмента, вставленного в обследуемую область сосудов в течение временного интервала без первого движения пациента, определяют последовательность первого движения для периодического движения хирургического инструмента в течение цикла второго движения посредством анализа движения хирургического инструмента в первой последовательности полученных изображений, создают модель движения хирургического инструмента, обусловленную исключительно вторым движением, определяют оператор (Н), задающий взаимосвязь между последовательностью первого движения хирургического инструмента и вторым движением, получают передаваемые в реальном времени изображения обследуемой области сосудов с помощью хирургического инструмента, вставленного в обследуемую область сосудов пациента, вычитают движение хирургического инструмента, обусловленное вторым движением с использованием оператора (Н), и определяют движение хирургического инструмента, обусловленное первым движением пациента, и регистрируют ранее полученное изображение обследуемого объекта на основе первого движения. Для осуществления способа используют модуль обработки данных для предоставления изображения, входящий в состав системы медицинской визуализации, содержащей также устройство получения рентгеновских изображений с источником рентгеновского излучения, выполненным с возможностью формировать рентгеновское излучение, и модуль определения рентгеновских изображений, выполненный с возможностью отправлять данные изображения в модуль обработки данных. На машиночитаемом носителе сохранена компьютерная программа для предоставления изображения. Использование изобретений позволяет повысить гибкость при обработке большой вариативности движения при представлении изображения. 4 н. и 5 з.п. ф-лы, 5 ил.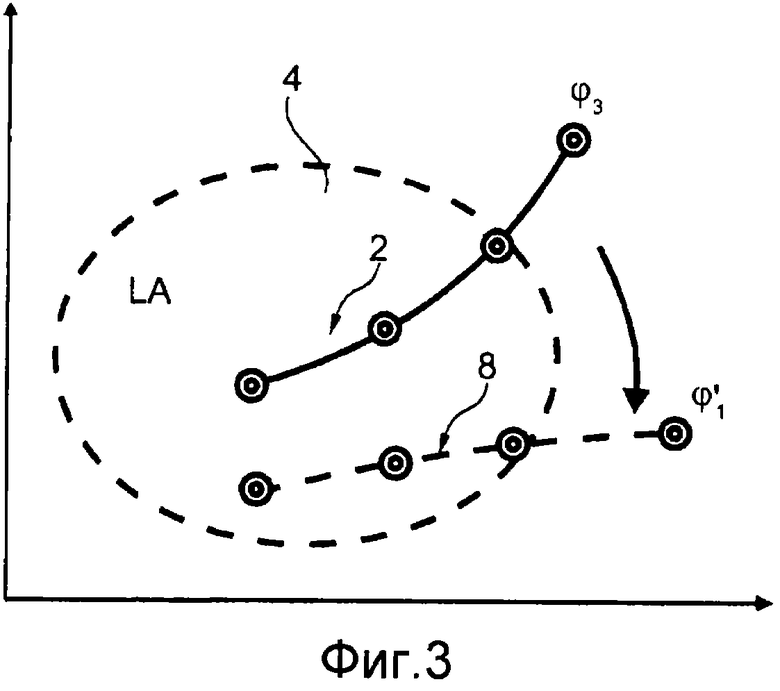
1. Способ предоставления изображения, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах в обследуемой области, причем в этой области позиция обследуемого объекта зависит, по меньшей мере, от первого источника движения, при этом способ содержит этапы, на которых:
(i) получают (24) первую последовательность изображений обследуемой области сосудов с помощью хирургического инструмента, вставленного в обследуемую область сосудов в течение временного интервала без первого движения пациента;
(ii) определяют (26) последовательность первого движения для периодического движения хирургического инструмента в течение цикла второго движения посредством анализа движения хирургического инструмента в первой последовательности полученных изображений;
(iii) создают (28) модель движения хирургического инструмента, обусловленную исключительно вторым движением;
(iv) определяют (30) оператор (Н), задающий взаимосвязь между последовательностью первого движения хирургического инструмента и вторым движением;
(iv) получают (32) передаваемые в реальном времени изображения обследуемой области сосудов с помощью хирургического инструмента, вставленного в обследуемую область сосудов пациента;
(v) вычитают (34) движение хирургического инструмента, обусловленное вторым движением с использованием оператора (Н), и определяют движение хирургического инструмента, обусловленное первым движением пациента; и
(vi) регистрируют (36) ранее полученное изображение обследуемого объекта на основе первого движения.
2. Способ по п. 1, в котором первый источник движения представляет собой дыхательное движение.
3. Способ по п. 1 или 2, в котором второй источник движения представляет собой движение при сердечной деятельности.
4. Способ по любому из пп. 1-2, в котором обследуемая область представляет собой область, окружающую корень аорты.
5. Способ по любому из пп. 1-2, в котором обследуемый объект представляет собой левое предсердие (4).
6. Способ по любому из пп. 1-2, дополнительно содержащий:
наложение (38) представления обследуемого объекта на передаваемые в реальном времени изображения и
отображение (40) результирующих изображений на экране.
7. Модуль (18) обработки данных для предоставления изображения, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах, причем модуль (18) обработки данных содержит процессор данных, который выполнен с возможностью осуществления способа по любому из пп. 1-6.
8. Система (10) медицинской визуализации, содержащая:
модуль (18) обработки данных по п. 7; и
устройство получения рентгеновских изображений с источником (12) рентгеновского излучения, выполненным с возможностью формировать рентгеновское излучение, и модуль (16) определения рентгеновских изображений, выполненный с возможностью отправлять данные изображения в модуль (18) обработки данных.
9. Машиночитаемый носитель, на котором сохранена компьютерная программа для предоставления изображения, поддерживающего точное направление хирургического инструмента при хирургической операции на сосудах,
причем упомянутая компьютерная программа при выполнении посредством модуля (18) обработки данных выполнена с возможностью управления способом по одному из пп. 1-6.
| WO 2008107814 A1, 12.09.2008 | |||
| US 2010145193 A1, 10.06.2010 | |||
| US 2005074154 A1, 07.04.2005 | |||
| US 6195445 B1, 27.02.2001 | |||
| Устройство для исследования акустической активности сердца | 1985 |
|
SU1378811A1 |

