ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых ситуациях хирургу может потребоваться позиционировать хирургический инструмент через отверстие в организме пациента и применять инструмент для регулировки, позиционирования, прикрепления и/или другого взаимодействия с тканью внутри организма пациента. Например, в некоторых хирургических вмешательствах (например, колоректальных, бариатрических, торакотомических и т. д.) части желудочно-кишечного тракта и/или пищевода и т. д. можно рассечь и удалить для устранения нежелательной ткани или по другим причинам. После удаления требуемой ткани может возникнуть необходимость в повторном соединении оставшихся частей вместе посредством анастомоза «конец в конец». Одним таким инструментом для выполнения этих анастомотических процедур является круговой сшивающий инструмент, который вставляют через естественное отверстие в организме пациента. Некоторые круговые сшивающие инструменты выполнены с возможностью по существу одновременного рассекания ткани и сшивания ткани. Например, круговой сшивающий инструмент может отсекать излишек ткани, находящийся внутри кольцевого набора скобок в анастомозе, обеспечивая по существу плавный переход между соединяемыми частями просвета в анастомозе.
Примеры круговых хирургических сшивающих инструментов описаны в патенте США № 5,205,459, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 27 апреля 1993 г.; патенте США № 5,271,544, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 21 декабря 1993 г.; патенте США № 5,275,322, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 4 января 1994 г.; патенте США № 5,285,945, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 15 февраля 1994 г.; патенте США № 5,292,053, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 8 марта 1994 г.; патенте США № 5,333,773, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 2 августа 1994 г.; патенте США № 5,350,104, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 27 сентября 1994 г.; и патенте США № 5,533,661, озаглавленном «Хирургический сшивающий инструмент для наложения анастомоза», выданном 9 июля 1996 г.; и патентной публикации США № 2012/0292372, озаглавленной «Недорогой узел упора для кругового сшивающего инструмента», опубликованной 22 ноября 2012 г. Описание каждого из приведенных выше патентов США и патентной публикации США включено в настоящий документ путем ссылки. Некоторые такие сшивающие инструменты выполнены с возможностью зажимания слоев ткани, рассечения зажатых слоев ткани и выталкивания скобок через слои ткани, чтобы по существу запечатать рассеченные слои ткани вместе с находящимися рядом рассеченными концами слоев ткани, соединяя таким образом два рассеченных конца анатомического просвета.
Исключительно в качестве других дополнительных примеров приводятся хирургические сшивающие инструменты, описанные в патенте США № 4,805,823, озаглавленном «Конфигурация углублений в сшивающих инструментах для внутренних органов», выданном 21 февраля 1989 г.; патенте США № 5,415,334, озаглавленном «Хирургический сшивающий инструмент и кассета со скобками», выданном 16 мая 1995 г.; патенте США № 5,465,895, озаглавленном «Хирургический сшивающий инструмент», выданном 14 ноября 1995 г.; патенте США № 5,597,107, озаглавленном «Хирургический сшивающий инструмент», выданном 28 января 1997 г.; патенте США № 5,632,432, озаглавленном «Хирургический инструмент», выданном 27 мая 1997 г.; патенте США № 5,673,840, озаглавленном «Хирургический инструмент», выданном 7 октября 1997 г.; патенте США № 5,704,534, озаглавленном «Узел шарнира для хирургических инструментов», выданном 6 января 1998 г.; патенте США № 5,814,055, озаглавленном «Хирургический зажимной механизм», выданном 29 сентября 1998 г.; патенте США № 6,978,921, озаглавленном «Хирургический сшивающий инструмент со встроенным пусковым механизмом с трехрогим элементом», выданном 27 декабря 2005 г.; патенте США № 7,000,818, озаглавленном «Хирургический сшивающий инструмент, имеющий отдельные и отличные друг от друга закрывающую и пусковую системы», выданном 21 февраля 2006 г.; патенте США № 7,143,923, озаглавленном «Хирургический сшивающий инструмент, имеющий пусковую блокировку для незакрытого упора», выданном 5 декабря 2006 г.; патенте США № 7,303,108, озаглавленном «Хирургический сшивающий инструмент со встроенным многотактовым пусковым механизмом с гибкой рейкой», выданном 4 декабря 2007 г.; патенте США № 7,367,485, озаглавленном «Хирургический сшивающий инструмент со встроенным многотактовым пусковым механизмом, имеющим поворотную трансмиссию», выданном 6 мая 2008 г.; патенте США № 7,380,695, озаглавленном «Хирургический сшивающий инструмент, имеющий единственный механизм блокировки для предотвращения пуска», выданном 3 июня 2008 г.; патенте США № 7,380,696, озаглавленном «Шарнирный хирургический сшивающий инструмент со встроенным двухкомпонентным пусковым механизмом с трехрогим элементом», выданном 3 июня 2008 г.; патенте США № 7,404,508, озаглавленном «Хирургическое сшивающее и рассекающее устройство», выданном 29 июля 2008 г.; патенте США № 7,434,715, озаглавленном «Хирургический сшивающий инструмент, имеющий многотактовый пуск с блокировкой открытия», выданном 14 октября 2008 г.; и патенте США № 7,721,930, озаглавленном «Одноразовая кассета с адгезивным составом для использования со сшивающим устройством», выданном 25 мая 2010 г. Описание каждого из процитированных выше патентов США включено в настоящий документ путем ссылки. Хотя упомянутые выше хирургические сшивающие инструменты описаны в связи с применением в эндоскопических процедурах, следует понимать, что такие хирургические сшивающие инструменты также можно применять в открытых процедурах и/или других неэндоскопических процедурах.
Хотя были изготовлены и применялись различные типы хирургических сшивающих инструментов и связанных с ними компонентов, считается, что до изобретателя (-ей) никто не изготовил или не применял изобретение, описанное в приложенной формуле изобретения.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Хотя описание ограничивается формулой изобретения, которая подробно показывает и четко заявляет права на эту технологию, считается, что лучшему пониманию данной технологии послужит следующее описание некоторых примеров в сочетании с сопровождающими рисунками, на которых похожие числовые обозначения идентифицируют одинаковые элементы:
на ФИГ. 1 показан вид сбоку в вертикальной проекции примера кругового хирургического сшивающего инструмента;
на ФИГ. 2A показан увеличенный вид в продольном сечении примера узла сшивающей головки инструмента, изображенного на ФИГ. 1, на котором пример упора показан в открытом положении;
на ФИГ. 2B показан увеличенный вид в продольном сечении узла сшивающей головки, изображенного на ФИГ. 2A, на котором упор показан в закрытом положении;
на ФИГ. 2C показан увеличенный вид в продольном сечении узла сшивающей головки, изображенного на ФИГ. 2A, на котором примеры выталкивателя скобок и лезвия показаны в активированном положении;
на ФИГ. 3 показан увеличенный частичный вид в поперечном сечении примера скобки, образованной об упор;
на ФИГ. 4A показан увеличенный вид сбоку в вертикальной проекции примера узла рукоятки активатора хирургического инструмента, изображенного на ФИГ. 1, с удаленным участком корпуса, на котором спусковой механизм показан в неактивированном положении, а блокирующий элемент показан в заблокированном положении;
на ФИГ. 4B показан увеличенный вид сбоку в вертикальной проекции узла рукоятки активатора, изображенного ФИГ. 4A, на котором спусковой механизм показан в активированном положении, а блокирующий элемент показан в незаблокированном положении;
на ФИГ. 5 показан увеличенный частичный вид в перспективе примера узла индикатора хирургического инструмента, изображенного на ФИГ. 1, на котором показаны окошко индикатора и рычаг индикатора;
на ФИГ. 6 показан схематичный вид окошка индикатора, изображенного на ФИГ. 5, на котором показан пример планки индикатора и примеры представлений соответствующих скобок;
на ФИГ. 7A показан вид в перспективе сбоку примера альтернативного узла привода для использования с круговым хирургическим сшивающим инструментом, изображенным на ФИГ. 1, в предпусковом положении;
на ФИГ. 7B показан вид в перспективе сбоку узла привода, изображенного на ФИГ. 7A, в положении при срабатывании, где вертикальное звено выталкивается вверх;
на ФИГ. 7C показан вид в перспективе сбоку узла привода, изображенного на ФИГ. 7A, в положении после срабатывания с опущенным вертикальным звеном;
на ФИГ. 8 показан вид в перспективе сбоку другого примера альтернативного узла привода для использования с круговым хирургическим сшивающим инструментом, изображенным на ФИГ. 1, отличающегося наличием наклоненного кулачкового вала;
на ФИГ. 9 показан вид в перспективе сбоку другого примера альтернативного узла привода для использования с круговым хирургическим сшивающим инструментом, изображенным на ФИГ. 1, отличающегося наличием реечной передачи; и
на ФИГ. 10 показан пример профиля усилия, связанного с пусковым тактом кругового хирургического сшивающего инструмента.
Предполагается, что рисунки не являются ограничивающими каким-либо образом, и считается, что различные варианты осуществления технологии можно реализовать множеством других способов, включая те, которые необязательно показаны на рисунках. Прилагаемые рисунки, включенные в спецификацию и формирующие ее часть, иллюстрируют несколько аспектов данной технологии и вместе с описанием служат для объяснения принципов технологии; при том понимается, что эта технология не ограничивается конкретными изображенными конструкциями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следующее описание некоторых примеров технологии не следует использовать для ограничения объема настоящего изобретения. Другие примеры, элементы, аспекты, варианты осуществления и преимущества технологии станут понятны специалистам в данной области из следующего описания, в котором для целей иллюстрации предложен один из лучших способов реализации технологии. После реализации технология, описанная в настоящем документе, может иметь другие разные и очевидные аспекты, все из которых не выходят за рамки технологии. Соответственно, рисунки и описания следует рассматривать как иллюстративные по своей сути и не имеющие ограничительного характера.
I. ОБЗОР ПРИМЕРА КРУГОВОГО ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА
На ФИГ. 1–6 представлен пример кругового хирургического сшивающего инструмента (10), имеющего узел (20) сшивающей головки, узел (60) ствола и узел (70) рукоятки активатора, каждый из которых описан более подробно ниже. Узел (60) ствола проходит дистально от узла (70) рукоятки активатора, и узел (20) сшивающей головки соединен с дистальным концом узла (60) ствола. Вкратце, узел (70) рукоятки активатора выполнен с возможностью приведения в действие выталкивателя (24) скобок узла (20) сшивающей головки для выталкивания множества скобок (66) за пределы узла (20) сшивающей головки. Скобки (66) сгибаются с образованием готовых скобок упором (40), который прикреплен к дистальному концу инструмента (10). Таким образом, ткань (2), изображенную на ФИГ. 2A–2C, можно сшить с использованием инструмента (10).
В настоящем примере инструмент (10) содержит закрывающую систему и пусковую систему. Закрывающая система содержит троакар (38), активатор (39) троакара и вращательную ручку (98). Упор (40) может быть соединен с дистальным концом троакара (38). Вращательная ручка (98) выполнена с возможностью поступательного перемещения троакара (38) продольно относительно узла (20) сшивающей головки, таким образом она может поступательно перемещать упор (40), когда упор (40) соединен с троакаром (38), чтобы зажимать ткань между упором (40) и узлом (20) сшивающей головки. Пусковая система содержит спусковой механизм (74), узел (84) активации спускового механизма, активатор (64) выталкивателя и выталкиватель (24) скобок. Выталкиватель (24) скобок включает в себя скальпель (36), выполненный с возможностью рассечения ткани, когда выталкиватель (24) скобок приводится в действие продольно. Кроме того, скобки (66) расположены дистально относительно множества выталкивающих скобки элементов (30) выталкивателя (24) скобок так, что выталкиватель (24) скобок также выталкивает скобки (66) дистально, когда выталкиватель (24) скобок приводится в действие продольно. Таким образом, когда спусковой механизм (74) приведен в действие и узел (84) активации спускового механизма приводит в действие выталкиватель (24) скобок посредством активатора (64) выталкивателя, скальпель (36) и элементы (30) по существу одновременно рассекают ткань (2) и выталкивают скобки (66) дистально в ткань относительно узла (20) сшивающей головки. Компоненты и функциональные возможности закрывающей системы и пусковой системы более подробно описаны ниже.
A. ПРИМЕР УПОРА
Как показано на ФИГ. 1–2C, упор (40) выполнен с возможностью избирательного соединения с инструментом (10) для обеспечения поверхности, о которую могут быть согнуты скобки (66) для сшивания материала, содержащегося между узлом (20) сшивающей головки и упором (40). Упор (40) настоящего примера может быть выполнен с возможностью избирательного соединения с троакаром или заостренным штоком (38), который проходит дистально относительно узла (20) сшивающей головки. Как показано на ФИГ. 2A–2C, упор (40) выполнен с возможностью избирательного соединения посредством соединения проксимального ствола (42) упора (40) с дистальным кончиком троакара (38). Упор (40) содержит по существу круговую головку (48) упора и проксимальный ствол (42), проходящий проксимально из головки (48) упора. В показанном примере проксимальный ствол (42) содержит трубчатый элемент (44), имеющий упруго смещенные фиксаторы (46) для избирательного присоединения упора (40) к троакару (38), хотя этот пример не является обязательным, и следует понимать, что можно использовать и другие удерживающие элементы для соединения упора (40) с троакаром (38). Например, для соединения упора (40) с троакаром (38) можно использовать C-образные зажимы, фиксаторы, резьбу, штифты, адгезивы и т. п. Кроме того, хотя упор (40) описан как выполненный с возможностью избирательного соединения с троакаром (38), в некоторых вариантах проксимальный ствол (42) может включать в себя односторонний соединительный элемент, так что упор (40) невозможно удалить с троакара (38) после прикрепления упора (40). Только для примера, односторонние элементы включают в себя зазубрины, односторонние защелки, цанги, кольца, язычки, полосы и т. д. Разумеется, обычному специалисту в данной области будут очевидны и другие конфигурации для соединения упора (40) с троакаром (38) в контексте идей, представленных в настоящем документе. Например, вместо этого троакар (38) может представлять собой полый ствол, а проксимальный ствол (42) может содержать заостренный шток, выполненный с возможностью вставки в полый ствол.
Головка (48) упора настоящего примера содержит множество формирующих скобки углублений (52), образованных в проксимальной поверхности (50) головки (48) упора. Соответственно, когда упор (40) находится в закрытом положении, а скобки (66) выталкиваются за пределы узла (20) сшивающей головки в формирующие скобки углубления (52), как показано на ФИГ. 2C, ножки (68) скобок (66) сгибаются с образованием завершенных скобок.
Так как упор (40) является отдельным компонентом, следует понимать, что упор (40) можно вставить и присоединить к участку ткани (2) перед соединением с узлом (20) сшивающей головки. Только в качестве примера упор (40) можно вставить в первый трубчатый участок ткани (2) и присоединить к нему, тогда как инструмент (10) вставляют во второй трубчатый участок ткани (2) и присоединяют к нему. Например, первый трубчатый участок ткани (2) можно пришить к участку упора (40) или вокруг него, а второй трубчатый участок ткани (2) можно пришить к троакару (38) или вокруг него.
Как показано на ФИГ. 2A, упор (40) впоследствии соединяется с троакаром (38). Троакар (38) настоящего примера показан в самом дистальном активированном положении. Такое выдвинутое положение троакара (38) может обеспечить более большую площадь, с которой можно соединить ткань (2) перед прикреплением упора (40). Кроме того, выдвинутое положение троакара (38) также может обеспечивать более простое прикрепление упора (40) к троакару (38). Троакар (38) дополнительно включает в себя сужающийся дистальный кончик. Такой кончик способен прокалывать ткань и/или способствовать вставке упора (40) на троакар (38), хотя сужающийся дистальный кончик является необязательным. Например, в других вариантах троакар (38) может иметь тупой кончик. В дополнительном или альтернативном варианте осуществления троакар (38) может включать в себя магнитный участок (не показан), который может притягивать упор (40) к троакару (38). Конечно, обычному специалисту в данной области будут понятны и другие дополнительные конфигурации и конструкции упора (40) и троакара (38) в контексте идей, представленных в настоящем документе.
Когда упор (40) соединен с троакаром (38), расстояние между проксимальной поверхностью упора (40) и дистальной поверхностью узла (20) сшивающей головки формирует расстояние зазора d. Троакар (38) настоящего примера имеет возможность поступательного перемещения продольно относительно узла (20) сшивающей головки посредством регулировочной ручки (98), размещенной у проксимального конца узла (70) рукоятки активатора, как более подробно описано ниже. Соответственно, когда упор (40) соединен с троакаром (38), вращение регулировочной ручки (98) увеличивает или уменьшает расстояние зазора d путем активации упора (40) относительно узла (20) сшивающей головки. Например, как последовательно показано на ФИГ. 2A–2B, упор (40) показан приведенным в действие относительно узла (70) рукоятки активатора проксимально из исходного открытого положения в закрытое положение, таким образом уменьшая расстояние зазора d и расстояние между двумя участками соединяемой ткани (2). После того как расстояние зазора d доведено до пределов предварительно заданного диапазона, можно активировать узел (20) сшивающей головки, как показано на ФИГ. 2C, для сшивания и рассечения ткани (2) между упором (40) и узлом (20) сшивающей головки. Узел (20) сшивающей головки выполнен с возможностью сшивания и рассечения ткани (2) пользователем путем поворота спускового механизма (74) узла (70) рукоятки активатора, как более подробно описано ниже.
Как указано выше, расстояние зазора d соответствует расстоянию между упором (40) и узлом (20) сшивающей головки. Когда инструмент (10) вставлен в организм пациента, данное расстояние зазора d может не быть легко видимым. Таким образом, обеспечивается выполненная с возможностью перемещения планка (110) индикатора, показанная на ФИГ. 5–6, видимая через окошко (120) индикатора, расположенное напротив спускового механизма (74). Планка (110) индикатора выполнена с возможностью перемещения в ответ на вращение регулировочной ручки (98) так, что положение планки (110) индикатора представляет расстояние зазора d. Как показано на ФИГ. 6, окошко (120) индикатора дополнительно содержит шкалу (130), которая указывает, что зазор упора находится в пределах желательного диапазона эксплуатации (например, области зеленого цвета, или «зеленой зоны»), и соответствующее представление сжатия скобки на каждом конце шкалы (130). Только в качестве примера, как показано на ФИГ. 6, первое изображение (132) скобки показывает большую высоту скобки, тогда как второе изображение (134) скобки показывает малую высоту скобки. Соответственно, пользователь может видеть положение соединенного упора (40) относительно узла (20) сшивающей головки посредством планки (110) индикатора и шкалы (130). Впоследствии пользователь может отрегулировать расположение упора (40) посредством регулировочной ручки (98) соответствующим образом.
Обращаясь вновь к ФИГ. 2A–2C, пользователь прошивает участок ткани (2) вокруг трубчатого элемента (44) так, что головка (48) упора размещается внутри участка прошиваемой скобками ткани (2). Когда ткань (2) прикрепляется к упору (40), фиксаторы (46) и участок трубчатого элемента (44) выступают из ткани (2) так, что пользователь может присоединить упор (40) к троакару (38). Когда ткань (2) соединена с троакаром (38) и/или другим участком узла (20) сшивающей головки, пользователь прикрепляет упор (40) к троакару (38) и приводит в действие упор (40) проксимально к узлу (20) сшивающей головки, сокращая расстояние зазора d. После того как инструмент (10) окажется в пределах диапазона эксплуатации, пользователь сшивает вместе концы ткани (2), таким образом формируя по существу непрерывный трубчатый участок ткани (2).
Упор (40) дополнительно может быть выполнен в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
B. ПРИМЕР УЗЛА СШИВАЮЩЕЙ ГОЛОВКИ
Узел (20) сшивающей головки настоящего примера соединен с дистальным концом узла (60) ствола и содержит трубчатый корпус (22), вмещающий выталкиватель (24) скобок, выполненный с возможностью скольжения, и множество скобок (66), содержащихся внутри углублений (32) для скобок. Скобки (66) и углубления (32) для скобок размещены в виде кругового набора вокруг трубчатого корпуса (22). В настоящем примере скобки (66) и углубления (32) для скобок размещены в виде пары концентрических кольцевых рядов скобок (66) и углублений (32) для скобок. Выталкиватель (24) скобок выполнен с возможностью приведения в действие внутри трубчатого корпуса (22) продольно в ответ на вращение спускового механизма (74) узла (70) рукоятки активатора. Как показано на ФИГ. 2A–2C, выталкиватель (24) скобок содержит расширяющийся цилиндрический элемент, имеющий отверстие (26) троакара, центральное углубление (28) и множество элементов (30), расположенных по окружности вокруг центрального углубления (28) и проходящих дистально относительно узла (60) ствола. Каждый элемент (30) выполнен с возможностью контакта и зацепления соответствующей скобки (66) из множества скобок (66) внутри углублений (32) для скобок. Соответственно, когда выталкиватель (24) скобок приведен в действие относительно узла (70) рукоятки активатора дистально, каждый элемент (30) выталкивает соответствующую скобку (66) за пределы его углубления (32) для скобки через отверстие (34) для скобки, образованное в дистальном конце трубчатого корпуса (22). Поскольку каждый элемент (30) проходит из выталкивателя (24) скобок, множество скобок (66) выталкивается за пределы узла (20) сшивающей головки по существу в одно и то же время. Когда упор (40) находится в закрытом положении, скобки (66) выталкиваются в формирующие скобки углубления (52) для сгибания ножек (68) скобок (66), таким образом сшивая материал, размещенный между упором (40) и узлом (20) сшивающей головки. На ФИГ. 3 показан один пример скобки (66), выталкиваемой элементом (30) в формирующее скобку углубление (32) упора (40) для сгибания ножек (68).
Выталкиватель (24) скобок дополнительно включает в себя цилиндрический скальпель (36), который расположен соосно c отверстием (26) для троакара и вставляется из углублений (32) для скобок. В настоящем примере цилиндрический скальпель (36) размещен внутри центрального углубления (28) для поступательного перемещения дистально выталкивателем (24) скобок. Когда упор (40) присоединен к троакару (38), как описано выше, головка (48) упора обеспечивает поверхность, вплотную к которой цилиндрический скальпель (36) рассекает материал, содержащийся между упором (40) и узлом (20) сшивающей головки. В некоторых вариантах головка (48) упора может включать в себя углубление (не показано) для цилиндрического скальпеля (36), чтобы способствовать рассечению материала (например, путем обеспечения объединенного срезающего края). В дополнительном или альтернативном варианте осуществления головка (48) упора может включать в себя один или более противоположных цилиндрических скальпелей (не показаны), смещенных от цилиндрического скальпеля (36) так, что можно обеспечить рассечение ножничного типа. Обычному специалисту в данной области будут понятны и другие конфигурации в контексте идей, представленных в настоящем документе. Таким образом, узел (20) сшивающей головки выполнен с возможностью как сшивания, так и рассечения ткани (2) по существу одновременно в ответ на приведение в действие узла (70) рукоятки активатора.
Конечно, узел (20) сшивающей головки дополнительно может быть сконструирован в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
Как указано ранее, выталкиватель (24) скобок включает в себя отверстие (26) для троакара. Отверстие (26) для троакара выполнено с возможностью обеспечения скольжения троакара (38) продольно относительно узла (20) сшивающей головки и/или узла (60) ствола. Как показано на ФИГ. 2A–2C, троакар (38) присоединен к активатору (39) троакара так, что троакар (38) может быть приведен в действие продольно посредством вращения вращательной ручки (98), как это будет описано более подробно ниже со ссылкой на узел (70) рукоятки активатора. В настоящем примере активатор (39) троакара содержит удлиненный, относительно жесткий ствол, соединенный с троакаром (38), хотя это является необязательным. В некоторых вариантах активатор (39) может содержать материал, жесткий в продольном направлении, позволяющий при этом сгибание в боковых направлениях, так что во время применения участки инструмента (10) могут избирательно сгибаться или изгибаться; или инструмент (10) может включать в себя узел (60) ствола, выполненный с предварительным сгибом. Один пример материала представляет собой нитинол. Когда упор (40) соединен с троакаром (38), троакар (38) и упор (40) имеют возможность поступательного перемещения посредством активатора (39) для регулировки расстояния зазора d между упором (40) и узлом (20) сшивающей головки. Обычному специалисту в данной области в контексте идей, представленных в настоящем документе, будут понятны дополнительные конфигурации активатора (39) для приведения в действие троакара (38) продольно.
C. ПРИМЕР УЗЛА СТВОЛА
Узел (20) сшивающей головки и троакар (38) расположены в дистальном конце узла (60) ствола, как показано на ФИГ. 2A–2C. Узел (60) ствола настоящего примера содержит внешний трубчатый элемент (62) и активатор (64) выталкивателя. Внешний трубчатый элемент (62) соединен с трубчатым корпусом (22) узла (20) сшивающей головки и корпусом (72) узла (70) рукоятки активатора, обеспечивая таким образом механическую основу для активации в нем компонентов. Проксимальный конец активатора (64) выталкивателя соединен с узлом (84) активации спускового механизма узла (70) рукоятки активатора, описанного ниже. Дистальный конец активатора (64) выталкивателя соединен с выталкивателем (24) скобок так, что вращение спускового механизма (74) продольно приводит в действие выталкиватель (24) скобок. Как показано на ФИГ. 2A–2C, активатор (64) выталкивателя содержит трубчатый элемент, имеющий открытую продольную ось, так что активатор (39), соединенный с троакаром (38), может быть приведен в действие продольно внутри и относительно активатора (64) выталкивателя. Конечно, следует понимать, что внутри активатора (64) выталкивателя можно разместить другие компоненты, как будет понятно обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
Узел (60) ствола может быть дополнительно сконструирован в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
D. ПРИМЕР УЗЛА РУКОЯТКИ АКТИВАТОРА
Обращаясь теперь к ФИГ. 4A–5, узел (70) рукоятки активатора содержит корпус (72), спусковой механизм (74), блокирующий элемент (82), узел (84) активации спускового механизма и узел (90) активации троакара. Спусковой механизм (74) настоящего примера поворотно установлен на корпусе (72) и соединен с узлом (84) активации спускового механизма так, что вращение спускового механизма (74) из неактивированного положения (показано на ФИГ. 4A) в активированное положение (показано на ФИГ. 4B) приводит в действие активатор (64) выталкивателя, описанный выше. Пружина (78) соединена с корпусом (72) и спусковым механизмом (74) для смещения спускового механизма (74) к неактивированному положению. Блокирующий элемент (82) представляет собой элемент, выполненный с возможностью поворота, который соединен с корпусом (72). В первом, заблокированном, положении блокирующий элемент (82) поворачивается вверх и в сторону от корпуса (72) так, что блокирующий элемент (82) входит в зацепление со спусковым механизмом (74) и механически сопротивляется приведению в действие спускового механизма (74) пользователем. Во втором, незаблокированном, положении, как это показано на ФИГ. 1 и 4B, блокирующий элемент (82) повернут вниз так, что спусковой механизм (74) может быть приведен пользователем в действие. Соответственно, с блокирующим элементом (82) во втором положении спусковой механизм (74) может входить в зацепление с узлом (84) активации спускового механизма для активации инструмента (10).
Как показано на ФИГ. 4A–4B, узел (84) активации спускового механизма настоящего примера содержит скользящую каретку (86) спускового механизма, находящуюся в зацеплении с проксимальным концом активатора (64) выталкивателя. Каретка (86) включает в себя набор язычков (88) на проксимальном конце каретки (86) для удержания и зацепления с парой плеч (76) спускового механизма, проходящих из спускового механизма (74). Соответственно, когда спусковой механизм (74) повернут, каретка (86) приводится в действие продольно и передает продольное перемещение активатору (64) выталкивателя. В показанном примере каретка (86) жестко соединена с проксимальным концом активатора (64) выталкивателя, хотя это и является необязательным. Фактически в одном приводимом лишь в качестве примера альтернативном варианте каретка (86) может просто упираться в активатор (64) выталкивателя, тогда как дистальная пружина (не показана) смещает активатор (64) выталкивателя проксимально относительно узла (70) рукоятки активатора.
Узел (84) активации спускового механизма дополнительно может быть сконструирован в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
Корпус (72) также вмещает узел (90) активации троакара, выполненный с возможностью приведения в действие троакара (38) продольно в ответ на вращение регулировочной ручки (98). Как лучше всего показано на ФИГ. 4A–5, узел (90) активации троакара настоящего примера содержит регулировочную ручку (98), желобчатый хвостовик (94) и гильзу (92). Желобчатый хвостовик (94) настоящего примера размещен на проксимальном конце активатора (39) троакара, хотя следует понимать, что желобчатый хвостовик (94) и активатор (39) троакара могут альтернативно представлять собой отдельные компоненты, которые входят в зацепление для передачи продольного перемещения. Хотя желобчатый хвостовик (94) выполнен с возможностью поступательного перемещения внутри корпуса (72), желобчатый хвостовик (94) не вращается внутри корпуса (72). Регулировочная ручка (98) поддерживается с возможностью вращения проксимальным концом корпуса (72) и выполнена с возможностью вращения гильзы (92), которая входит в зацепление с желобчатым хвостовиком (94) посредством внутреннего язычка (не показан). Регулировочная ручка (98) также формирует внутреннюю резьбу (не показана), которая будет описана ниже более подробно. Желобчатый хвостовик (94) настоящего примера содержит непрерывный желоб (96), образованный на наружной поверхности желобчатого хвостовика (94). Таким образом, при вращении регулировочной ручки (98) внутренний язычок гильзы (92) двигается внутри желоба (96), а желобчатый хвостовик (94) приводится в действие продольно относительно гильзы (92). Так как желобчатый хвостовик (94) размещен на проксимальном конце активатора (39) троакара, вращение регулировочной ручки (98) в первом направлении выдвигает активатор (39) троакара дистально относительно узла (70) рукоятки активатора. Соответственно, расстояние зазора d между упором (40) и узлом (20) сшивающей головки увеличивается. При вращении регулировочной ручки (98) в противоположном направлении активатор (39) троакара приводится в действие проксимально относительно узла (70) рукоятки активатора для уменьшения расстояния зазора d между упором (40) и узлом (20) сшивающей головки. Таким образом, узел (90) активации троакара выполнен с возможностью приведения в действие троакара (38) в ответ на вращения регулировочной ручки (98). Конечно, обычному специалисту в данной области будут очевидны и другие конфигурации узла (90) активации троакара в контексте идей, представленных в настоящем документе.
Желоб (96) настоящего примера содержит множество различных участков (96A, 96B, 96C), которые имеют разный шаг или число желобов на единицу осевого расстояния Настоящий желоб (96) разделен на дистальный участок (96A), средний участок (96B) и проксимальный участок (96C). Как показано на ФИГ. 5, дистальный участок (96А) имеет малый шаг или большое число желобов на коротком осевом расстоянии желобчатого хвостовика (94). Средний участок (96B) содержит часть со сравнительно более крупным шагом или меньшим числом желобов на осевой длине, так что для прохождения длинного осевого расстояния внутреннему язычку гильзы (92) необходимо относительно небольшое число поворотов. Когда упор (40) находится в исходном дистальном положении по отношению к узлу (20) сшивающей головки, внутренний язычок гильзы (92) расположен в среднем участке (96B). Соответственно, расстояние зазора d может быстро уменьшаться при сравнительно небольшом количестве вращений регулировочной ручки (98), когда внутренний язычок гильзы (92) проходит по среднему участку (96B). Проксимальный участок (96C) настоящего примера по существу аналогичен дистальному участку (96A) и содержит малый шаг или большое число желобов на коротком осевом расстоянии желобчатого хвостовика (94), так что требуется большое число поворотов для прохождения малого осевого расстояния. Проксимальный участок (96C) настоящего примера находится в зацеплении с внутренней резьбой, образованной ручкой (98), когда упор (40) находится по существу рядом с узлом (20) сшивающей головки, так что планка (110) индикатора перемещается внутри окошка (120) индикатора вдоль шкалы (130) для указания, что зазор упора находится в пределах желательного диапазона эксплуатации, как более подробно описано ниже. Соответственно, когда желобчатый хвостовик (94) достигает проксимального положения, в котором проксимальный участок (96C) желоба (96) находится в зацеплении с внутренней резьбой ручки (98), каждое вращение регулировочной ручки (98) может уменьшать расстояние зазора d на относительно небольшую величину, обеспечивая точную подстройку. Следует понимать, что внутренний язычок гильзы (92) может высвобождаться из желоба (96), когда проксимальный участок (96C) входит в зацепление с внутренней резьбой ручки (98).
Узел (90) активации троакара дополнительно может быть сконструирован в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661, содержание которых полностью включено в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
В примере, показанном на ФИГ. 4A–4B, U-образный зажим (100) прикреплен к промежуточному участку активатора (39) троакара, размещенному дистально от желобчатого хвостовика (94). В настоящем примере удлиненный конец активатора (39) троакара входит в зацепление с пазом в корпусе узла (70) рукоятки, чтобы предотвращать вращение активатора (39) троакара вокруг своей оси при вращении регулировочной ручки (98). U-образный зажим (100) настоящего примера дополнительно включает в себя удлиненный паз (102) на каждой из своих противоположных сторон для приема крепежного элемента, такого как шуруп, винт, штифт и т. д., для избирательной регулировки продольного положения удлиненного паза (102) U-образного зажима (100) относительно активатора (39) троакара для целей калибровки планки (110) индикатора относительно шкалы (130). В некоторых других вариантах крепежный элемент (например, шуруп, винт, штифт и т. п.) входит в зацепление с участком корпуса (72), по существу предотвращая вращение активатора (39) троакара вокруг своей оси при вращении регулировочной ручки (98).
Как показано на ФИГ. 5, узел (70) рукоятки активатора дополнительно включает скобу (140) индикатора, выполненную с возможностью зацепления и поворота индикатора (104). Скоба (140) индикатора настоящего примера выполнена с возможностью скольжения относительно корпуса (72) вдоль пары пазов, образованных на корпусе (72). Скоба (140) индикатора содержит прямоугольную пластину (144), плечо (146) индикатора и наклоненный фланец (142). Наклоненный фланец (142) образован на проксимальном конце прямоугольной пластины (144) и включает в себя отверстие (не показано) для установки с возможностью скольжения на активаторе (39) троакара и/или желобчатом хвостовике (94). Спиральная пружина (150) расположена между фланцем (142) и ступицей (152) для смещения фланца (142) к U-образному зажиму (100). Соответственно, когда U-образный зажим (100) приводится в действие активатором (39) троакара и/или желобчатым хвостовиком (94) дистально, спиральная пружина (150) подталкивает скобу (140) индикатора, чтобы она двигалась дистально с U-образным зажимом (100). Кроме того, U-образный зажим (100) подталкивает скобу (140) индикатора проксимально относительно ступицы (152), когда активатор (39) троакара и/или желобчатый хвостовик (94) поступательно перемещается проксимально, таким образом сжимая спиральную пружину (150). Конечно, следует понимать, что в некоторых вариантах скобу (140) индикатора можно жестко прикрепить к активатору (39) троакара и/или желобчатому хвостовику (94).
В настоящем примере участок блокирующего элемента (82) упирается в поверхность (141) скобы (140) индикатора, когда скоба (140) индикатора находится в продольном положении, которое не соответствует моменту, когда зазор упора находится в пределах желательного диапазона эксплуатации (например, в области зеленого цвета, или в «зеленой зоне»). Когда зазор упора находится в пределах желательного диапазона эксплуатации (например, в области зеленого цвета, или в «зеленой зоне»), скоба (140) индикатора сужается, обеспечивая пару зазоров (145) с каждой стороны плеча (146) индикатора, что допускает поворот блокирующего элемента (82), таким образом высвобождая спусковой механизм (74). Соответственно, блокирующий элемент (82) и скоба (140) индикатора могут по существу предотвращать высвобождение и эксплуатацию спускового механизма (74) пользователем до тех пор, пока упор (40) не будет находиться в пределах предварительно заданного диапазона эксплуатации. Конечно, следует понимать, что в некоторых вариантах блокирующий элемент (82) может полностью отсутствовать.
Информация об этом диапазоне эксплуатации может визуально передаваться пользователю посредством планки (110) индикатора (104), показанной вплотную к шкале (130), вкратце описанной выше. На дистальном конце скобы (140) индикатора находится дистально выступающее плечо (146) индикатора, которое заканчивается у выступающего в боковом направлении пальца (148) для управления перемещением индикатора (104). Плечо (146) индикатора и палец (148), как лучше всего показано на ФИГ. 5, выполнены с возможностью входить в зацепление с язычком (106) индикатора (104) так, что индикатор (104) поворачивается при приведении в действие скобы (140) индикатора продольно. В настоящем примере индикатор (104) соединен с возможностью поворота с корпусом (72) на первом конце индикатора (104), хотя это является необязательным, а другие точки поворота индикатора (104) будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе. Планка (110) индикатора расположена на втором конце индикатора (104) так, что планка (110) индикатора перемещается в ответ на приведение в действие скобы (140) индикатора. Соответственно, как описано выше, планка (110) индикатора отображается через окошко (120) индикатора вплотную к шкале (130) (показана на ФИГ. 6), показывая относительное расстояние зазора d между упором (40) и узлом (20) сшивающей головки.
Конечно, скоба (140) индикатора, индикатор (104) и/или узел (70) рукоятки активатора дополнительно могут быть сконструированы в соответствии с, по меньшей мере, некоторыми из идей патента США № 5,205,459; патента США № 5,271,544; патента США № 5,275,322; патента США № 5,285,945; патента США № 5,292,053; патента США № 5,333,773; патента США № 5,350,104; патента США № 5,533,661; и/или патентной публикации США № 2012/0292372, описания которых включены в настоящий документ путем ссылки; и/или в соответствии с другими конфигурациями, которые будут очевидны обычному специалисту в данной области в контексте идей, представленных в настоящем документе.
II. ПРИМЕР ОСНАЩЕННОГО ДВИГАТЕЛЕМ АКТИВАТОРА
В некоторых вариантах осуществления может быть желательно двигать скобки (66) и скальпель (36) таким образом, чтобы избегать ручного приведения в движение кругового хирургического сшивающего инструмента (10). Например, в том случае, если силы руки оператора недостаточно для приведения в действие кругового хирургического сшивающего инструмента (10) может быть желательно наличие узла с электроприводом для выталкивателя скобок (24) и скальпеля (36). Оснащение двигателем, по меньшей мере, части инструмента (10) также может снизить риск ошибки оператора при движении выталкивателя (24) скобок и скальпеля (36). В некоторых случаях ошибка оператора при работе с активируемым вручную инструментом (10) может привести к тому, что инструмент (10) не приводится в действие полностью. Это может произойти, если оператору не удастся полностью привести в действие рукой спусковой механизм (74), в результате чего скобки (66) не смогут полностью сформироваться и, следовательно, полностью сшить анастомоз. Таким образом, использование двигателя для приведения в движение выталкивателя (24) скобок и скальпеля (36) может гарантировать, что за один рабочий такт скальпель (36) будет полностью выдвинут и разрежет ткань, и скобки (66) будут полностью размещены и скрепят ткань.
Однако не обязательно для всех участков кругового хирургического сшивающего инструмента (10) может понадобиться электропривод. Например, может быть желательно сохранить ручную регулировку ручки (98) или аналогичного элемента для контроля расстояния d между упором (40) и узлом (20) сшивающей головки. Обычному специалисту в данной области в контексте представленных в настоящем документе идей будет очевидно, что в других подходящих деталях кругового хирургического сшивающего инструмента (10), несмотря на использование двигателя, также может использоваться ручное приведение в действие.
A. ПРИМЕР ОСНАЩЕННОГО ДВИГАТЕЛЕМ УЗЛА КОЛЕННО-РЫЧАЖНОГО МЕХАНИЗМА
На ФИГ. 7A показан пример альтернативного узла (200) привода, пригодного для использования или встраивания в круговой хирургический сшивающий инструмент (10) для обеспечения механизированного выталкивания скобок (66) и скальпеля (36). В частности, узел (200) привода настоящего примера соединен с выталкивателем (224) скобок и скальпелем (236) посредством активатора (226) выталкивателя. Выталкиватель (224) скобок и скальпель (236) по существу сходны с выталкивателем (24) скобок и скальпелем (36), описанными выше и изображенными на ФИГ. 2B. Активатор (226) выталкивателя узла (200) привода выполнен с возможностью продольного перемещения выталкивателя (224) скобок и по существу аналогичен активатору (64) выталкивателя кругового хирургического сшивающего инструмента (10), описанному выше и изображенному на ФИГ. 2A. В настоящем примере активатор (226) выталкивателя содержит конструкцию блочного типа в соединении с выталкивателем (224) скобок и скальпелем (236). В частности, активатор (226) выталкивателя выполнен с возможностью дистального выдвижения и проксимального втягивания вдоль продольной оси (230), таким образом, перемещение активатора (226) выталкивателя обеспечивает дистальное выдвижение и проксимальное втягивание выталкивателя (224) скобок и скальпеля (236).
Разумеется, любой из этих компонентов может претерпевать различные изменения, что будет очевидно специалистам в данной области в свете идей, изложенных в настоящем документе.
Узел привода (200) дополнительно соединен с устройством ввода (202) для оператора и источником (204) электропитания. Устройство ввода (202) для оператора может включать в себя приводимый в действие вручную спусковой механизм (например, сходный со спусковым механизмом (74), и т. п.) и/или какие-либо иные устройства ввода, выполненные с возможностью инициировать движение узла привода (200). Например, устройство ввода (202) для оператора может включать в себя кнопку, спусковой механизм, рычаг, ползунок, сенсорную панель и т. п., которое электрическим способом запускает узел привода (200). В качестве дополнения или альтернативы устройство ввода (202) для оператора может включать в себя приводимый в действие электрическим или программным способом активатор, которым оператор управляет для активации движения узла привода (200). В некоторых вариантах устройство ввода (202) для оператора может включать в себя активируемую ногой педаль в соединении с узлом привода (200). Другие подходящие формы такого устройства ввода (202) для оператора будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Также следует понимать, что устройство ввода (202) для оператора можно разместить в любом подходящем месте на круговом хирургическом сшивающем инструменте (10) или вблизи него, что будет очевидно обычному специалисту в данной области в контексте описанных в настоящем документе идей. Например, устройство ввода (202) для оператора можно расположить на любом участке узла (70) рукоятки активатора, как показано на ФИГ. 1. В альтернативном варианте осуществления устройство ввода (202) для оператора также можно расположить где-либо отдельно от кругового хирургического сшивающего инструмента (10), что может включать в себя размещение устройства ввода (202) для оператора на отдельном пульте или компьютере. Устройство ввода (202) для оператора также можно разместить на пульте или на устройстве, имеющем беспроводную связь с круговым хирургическим сшивающим инструментом (10). В контексте идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие подходящие местоположения устройство ввода (202) для оператора.
Источник (204) электропитания может иметь различные формы. Например, источник (204) электропитания может представлять собой внешний источник (например, сетевую розетку и т. п.), связанный с инструментом (10) посредством кабеля. Источник (204) электропитания может также включать в себя аккумулятор или аккумуляторную батарею (например, внутри инструмента (10)), выполненную с возможностью доставки энергии на узел (200) привода. Источник (204) электропитания в некоторых случаях может также обеспечивать энергией, индуцированной беспроводным образом, с возможностью электропитания узла (200) привода. Другие подходящие варианты источника (204) электропитания будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Узел (200) привода настоящего примера содержит двигатель (206), приводной шкив (208), вертикальное звено (210), первое и второе звенья (216, 218) коленно-рычажного механизма, анкер (220) и активатор (226) выталкивателя. Двигатель (206) соединен с устройством ввода (202) для оператора и источником (204) электропитания. Источник (204) электропитания выполнен с возможностью подачи электропитания на двигатель (206), благодаря чему двигатель (206) приводится в действие. Устройство ввода (202) для оператора выполнено с возможностью инициации потока энергии от источника (204) электропитания к двигателю (206), таким образом, оператор может дать узлу (200) привода сигнал к запуску. Двигатель (206) может включать в себя двигатель любого подходящего типа, выполненный с возможностью обеспечения вращательного движения, как очевидно специалисту в данной области в контексте идей, изложенных в настоящем документе.
Двигатель (206) соединен с приводным шкивом (208). В частности, двигатель (206) вращает приводной вал (240), выполненный заодно с приводным шкивом (208). Приводной шкив (208) в настоящем примере содержит дискообразное колесо. Продольная ось (228) проходит через двигатель (206) и приводной шкив (208) так, что двигатель (206), приводной вал (240) и приводной шкив (208) вращаются коаксиально вокруг оси (228). Приводной шкив (208) соединен с вертикальным звеном (210) посредством соединительного звена (242) и первого штифта (212). Вертикальное звено (210) приводится в действие приводным шкивом (208) в обратном режиме коленчатого вала. Другими словами, соединительное звено (242) установлено на приводном шкиве (208) так, что при вращении приводного шкива (208) соединительное звено (242) и первый штифт (212) направляют вертикальное звено (210) вверх и вниз относительно оси (228). Соединительное звено (242) смещено относительно оси (228) так, что соединительное звено (242) движется вокруг оси (228) при вращении приводного шкива (208). Точка соприкосновения между первым штифтом (212) и вертикальным звеном (210) также перемещается вокруг продольной оси (228) при вращении приводного шкива (208). Соединительное звено (242) может быть соединено с первым штифтом (212) посредством шарового шарнирного соединения, универсального соединения или любого другого подходящего соединения, выполненного с возможностью обеспечения движения нижнего конца вертикального звена (210) по кольцевой траектории вокруг продольной оси (228) при вращении приводного шкива (208). Хотя штифт (212) формирует относительно короткое расстояние между приводным шкивом (208) и вертикальным звеном (210) в настоящем примере за счет общей длины соединительного звена (242), следует учитывать, что штифт (212) может включать в себя более длинный штифт, выполненный с возможностью выталкивания вертикального звена (210) вверх и вниз при перемещении приводного шкива (208).
Вертикальное звено (210) соединено со вторым штифтом (214) в точке сочленения первого звена (216) коленно-рычажного механизма и второго звена (218) коленно-рычажного механизма посредством вертикального звена (210). Следует понимать, что вертикальное звено (210) и второй штифт (214) могут быть соединены посредством шарового шарнирного соединения, универсального соединения или любого другого подходящего соединения, выполненного с возможностью обеспечения поворота вертикального звена (210) в боковом направлении относительно первого и второго звеньев коленно-рычажного механизма при вращении приводного шкива (208). В настоящем примере первое и второе звенья (216, 218) коленно-рычажного механизма имеют по существу одинаковую конструкцию, но следует понимать, что допускается использование других конфигураций. Например, первое и второе звенья (216, 218) коленно-рычажного механизма могут иметь отличающуюся длину, толщину и т. п. Дополнительно в примере варианта осуществления первое и второе звенья (216, 218) коленно-рычажного механизма имеют прямую конструкцию, но следует понимать, что первое и второе звенья (216, 218) коленно-рычажного механизма также могут включать в себя наклоненные или криволинейные балки, а также любые другие подходящие конструкции, что будет очевидно специалисту в данной области в контексте идей, изложенных в настоящем документе. Аналогичным образом, в примере варианта осуществления прямая форма вертикального звена (210) по существу аналогична форме первого и второго звеньев (216, 218) коленно-рычажного механизма, хотя следует понимать, что вертикальное звено (210) может иметь любые другие конфигурации, в том числе изогнутую или криволинейную форму. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны другие подходящие конфигурации звеньев (210, 216, 218).
Второе звено (218) коленно-рычажного механизма соединено с анкером (220) так, что второе звено (218) коленно-рычажного механизма может поворачиваться относительно анкера (220). В частности, второй штифт (246) коленно-рычажного механизма соединяет анкер (220) с участком узла (70) рукоятки активатора. Однако следует понимать, что анкер (220) может быть прикреплен к любому подходящему участку кругового хирургического сшивающего инструмента (10), как это будет очевидно для специалиста в данной области в контексте идей, изложенных в настоящем документе. Кроме того, следует понимать, что допускается использование любой другой подходящей конструкции для поворотного соединения второго звена (218) коленно-рычажного механизма и анкера (220). Анкер (220) обеспечивает опорную точку или механическую опору для второго звена (218) коленно-рычажного механизма, таким образом препятствуя поступательному перемещению второго звена (218) коленно-рычажного механизма относительно узла (70) рукоятки активатора.
Первое звено (216) коленно-рычажного механизма связано поворотным соединением с активатором (226) выталкивателя. В частности, первый штифт (248) коленно-рычажного механизма обеспечивает поворотное соединение первого звена (216) коленно-рычажного механизма и активатора (226) выталкивателя. В результате, при подъеме вертикального звена (210) второе звено (218) коленно-рычажного механизма и первое звено (216) коленно-рычажного механизма поворачиваются относительно анкера (220) и активатора (226) выталкивателя соответственно, при этом первое и второе звенья (216, 218) коленно-рычажного механизма совмещаются друг с другом. Такое совмещение делает возможным дистальное выдвижение активатора (226) выталкивателя. Вторая продольная ось (230) проходит через активатор (226) выталкивателя. При подъеме вертикального звена (210) происходит большее совмещение первого и второго звеньев (216, 218) коленно-рычажного механизма со второй продольной осью (230). На пике движения вертикального звена (210) вверх первое и второе звенья (216, 218) коленно-рычажного механизма по существу совмещаются со второй продольной осью (230), и активатор (226) выталкивателя находится в самом дистальном положении. При перемещении вертикального звена (210) вниз звенья (216, 218) коленно-рычажного механизма складываются и оттягивают активатор (226) выталкивателя в самое проксимальное положение.
B. ПРИМЕР ПУСКОВОЙ ПОСЛЕДОВАТЕЛЬНОСТИ С УЗЛОМ КОЛЕННО-РЫЧАЖНОГО МЕХАНИЗМА
На ФИГ. 7А показан узел привода (200) в предпусковом состоянии. Когда узел (200) привода находится в этом состоянии, оператор может установить круговой хирургический сшивающий инструмент (10) в открытом естественном просвете в организме пациента при подготовке к пуску. Упор (40) выдвинут проксимально относительно узла (70) рукоятки активатора из исходного, открытого, положения, как показано на ФИГ. 2A, в закрытое положение, как показано на ФИГ. 2B, при этом уменьшается расстояние зазора d и расстояние между двумя частями ткани, подлежащей сшиванию. Расстоянием d можно управлять посредством вращения регулировочной ручки (98) вручную. В предпусковом состоянии, в котором упор (40) можно регулировать вручную относительно узла (20) сшивающей головки, двигатель (206) не работает, и приводной шкив (208) находится в угловом положении так, что штифт (212) занимает самое нижнее положение относительно первой продольной оси (228), как показано на ФИГ. 7A. Соответственно, вертикальное звено (210) также находится в нижней точке относительно первой продольной оси (228). Кроме того, вертикальное звено (210) расположено по существу перпендикулярно продольной оси (228). Звенья (216, 218) коленно-рычажного механизма выдвинуты к первой продольной оси (228) и находятся в сложенном состоянии. Активатор (226) выталкивателя находится во втянутом состоянии, и выталкиватель (224) скобок и скальпель (236) также втянуты.
Когда оператор принимает решение о пуске кругового хирургического сшивающего инструмента (10), оператор при помощи устройства ввода (202) для оператора подает команду, которая инициирует доставку энергии двигателю (206) посредством источника (204) электропитания. Таким образом, двигатель (206) приводится в действие, заставляя приводной шкив (208) вращаться, как показано на ФИГ. 7B. Как показано на ФИГ. 7B, в состоянии срабатывания приводной шкив (208) повернулся на половину оборота. Вертикальное звено (210) выталкивается вверх, и звенья (216, 218) коленно-рычажного механизма выпрямляются вдоль второй продольной оси (230). Вертикальное звено (210) наклоняется к активатору (226) выталкивателя. При выпрямлении звеньев (216, 218) коленно-рычажного механизма или по существу совмещении друг с другом активатор (226) выталкивателя выдвигается дистально. При выдвижении активатора (226) выталкивателя дистально выталкиватель (224) скобок и скальпель (236) также выдвигаются аналогично выталкивателю (24) скобок и скальпелю (36), как описано выше со ссылкой на круговой хирургический сшивающий инструмент (10). При дистальном перемещении выталкивателя (224) скобок и скальпеля (236) скобки (66) выталкиваются в ткань, формируя круговой ряд на анастомозе; в то время как скальпель (236) отсекает лишнюю ткань от внутреннего участка кругового ряда наложенных скобок (66), аналогично тому, как показано на ФИГ. 2C.
В некоторых вариантах упор (40), как видно на ФИГ. 2A, содержит разрушаемую прокладку, отламываемую скальпелем (236) при выполнении скальпелем (236) полного перемещения в дистальном диапазоне. В некоторых случаях прокладка обеспечивает слуховой или тактильный сигнал обратной связи через узел (70) рукоятки активатора при разрушении прокладки в ответ на завершение полного выдвигания скальпеля (236) к упору (40), хотя такой слуховой/тактильный сигнал не является обязательным. Следует понимать, что наличие прокладки может представлять непредвиденное увеличение усилия, необходимого для выдвигания активатора (226) выталкивателя дистально. На ФИГ. 10 представлен пример профиля усилия, с которым сталкивается активатор (226) выталкивателя на протяжении диапазона дистального перемещения активатора (226) выталкивателя. На первом участке (500) дистального перемещения активатор (226) выталкивателя встречается с постепенно возрастающей нагрузкой или усилием сопротивления по мере того, как скальпель (236) продвигается через ткань (2). На втором участке (510) дистального перемещения активатор (226) выталкивателя встречается с резко возрастающей нагрузкой или усилием сопротивления по мере того, как скальпель (236) проходит через прокладку. На третьем участке (520) дистального перемещения активатор (226) выталкивателя сначала встречается с быстрым падением нагрузки или усилия сопротивления после разрушения прокладки, а впоследствии с возрастанием нагрузки или усилия сопротивления по мере того, как сшивающий привод (224) толкает скобки в упор (40) и таким образом формирует скобки, придавая им конечную высоту. В свете вышеизложенного дополнительно следует понимать, что в процессе поступательного перемещения из положения, показанного на ФИГ. 7A, в положение, показанное на ФИГ. 7B, звенья (216, 218) коленно-рычажного механизма обеспечивают увеличение передаточного отношения при достижении активатором (226) выталкивателя конца своего дистального диапазона перемещения (например, начало во время второго диапазона (510) дистального перемещения), таким образом обеспечивая повышенное дистальное тяговое усилие для разрушения прокладки и выталкивания скобок. Конечно, в некоторых версиях прокладка может полностью отсутствовать.
Двигатель (206) проходит к приводному шкиву (208) в том же направлении вращения, как показано на ФИГ. 7C, при этом приводной шкив (208) совершает полный оборот и возвращается в то же угловое положение, как показано на ФИГ. 7A. Вертикальное звено (210) оттягивается вниз посредством вращения приводного шкива (208) из положения, показанного на ФИГ. 7B, в положение, показанное на ФИГ. 7C. При оттягивании вертикального звена (210) вниз звенья (216, 218) коленно-рычажного механизма складываются и оттягивают активатор (226) выталкивателя проксимально. Таким образом, выполняется полный пусковой ход узла (200) привода. Оператор может впоследствии извлечь круговой хирургический сшивающий инструмент (10) из хирургического поля.
Следует понимать, что конфигурация источника (204) электропитания или двигателя (206) может предусматривать только один оборот приводного шкива (208), что соответствует полной активации. Для одного оборота на 360 градусов узел (200) привода может быть выполнен так, что при повороте приводного шкива (208) на первые 180 градусов активатор (226) выталкивателя выдвигается дистально; тогда как при повороте приводного шкива (208) на следующие 180 градусов активатор (226) выталкивателя втягивается проксимально. В некоторых случаях микроконтроллер, специализированная интегральная микросхема (ASIC) и/или другой тип модуля управления соединены с источником питания (204) и двигателем (206) и выполнены с возможностью автоматической остановки двигателя (206), таким образом обеспечивая способ динамического торможения двигателя (206) так, что двигатель (206) можно привести в действие только на один поворот приводного шкива (208). Только в качестве примера такой модуль управления может находиться в соединении с энкодером, который в свою очередь находится в соединении с валом (240). В качестве другого исключительно иллюстративного примера такой модуль управления может быть соединен с одним или более герконовыми реле, которые в свою очередь соединены с активатором (226) выталкивателя. Другие подходящие типы датчиков и модулей управления, которые можно использовать для обеспечения точной остановки двигателя (206) (например, на основании отслеживаемого вращения колеса привода (208), на основе поступательного перемещения ствола (240) и/или на основе какого-либо иного параметра и т. п.) будут очевидны обычным специалистам в данной области в контексте идей, изложенных в настоящем документе. Конечно, модуль управления может быть выполнен с возможностью управления двигателем (206) для активации любого подходящего числа вращений и т. п. В некоторых случаях управление запуском и остановкой двигателя (206) может осуществляться в соответствии с идеями, изложенными в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, описание которой включено в настоящий документ путем ссылки.
C. ПРИМЕР УЗЛА ПРИВОДА С НАКЛОНЕННЫМ КУЛАЧКОМ
На ФИГ. 8 показан пример альтернативного узла (300) привода, который может быть использован или встроен в круговой хирургический сшивающий инструмент (10) для обеспечения моторизированного выталкивания скобок (66) и скальпеля (36). В частности, узел (300) привода настоящего примера содержит двигатель (306), наклоненный кулачок (308), кулачковый следящий элемент (312), вертикальное звено (310), первое звено (316) коленно-рычажного механизма, второе звено (318) коленно-рычажного механизма, анкер 320) и вал (326). Двигатель (306), вертикальное звено (310), первое звено (316) коленно-рычажного механизма, второе звено (318) коленно-рычажного механизма, анкер (320) и вал (326) по существу аналогичны двигателю (206), вертикальному звену (210), первому звену (216) коленно-рычажного механизма, второму звену (218) коленно-рычажного механизма, анкеру (220) и активатору (226) выталкивателя, описанным выше. Аналогично двигателю (206), двигатель (306) может быть управляемым в соответствии с идеями, представленными в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Вертикальное звено (310) соединено с возможностью вращения с первым и вторым звеньями (316, 318) коленно-рычажного механизма посредством первого шарнирного штифта (352). Первое звено (316) коленно-рычажного механизма соединено с валом (326) посредством второго шарнирного штифта (349). Второе звено (318) коленно-рычажного механизма соединено с анкером (320) посредством третьего шарнирного штифта (348).
Наклоненный кулачок (308) соединен с возможностью вращения с двигателем (306) при помощи приводного вала (340). Наклоненный кулачок (308) имеет наклоненную дистальную поверхность (309), соприкасающуюся с кулачковым следящим элементом (312). В частности, кулачковый следящий элемент (312) имеет проксимальный свободный конец (342), который контактирует с наклоненной поверхностью (309) при вращении наклоненного кулачка (308). Дистальная поверхность (309) имеет покатый наклон относительно оси приводного вала (340), таким образом, дистальная поверхность (309) толкает свободный конец (342) дистально при повороте кулачка (308) из положения, показанного на ФИГ. 8, в положение, развернутое на 180 градусов от положения кулачка (308), показанного на ФИГ. 8. Кулачковый следящий элемент (312) соединен с возможностью поворота с шарнирным штифтом (344). Шарнирный штифт (344) соединен с любым подходящим участком узла (70) рукоятки активатора, обеспечивая таким образом механическую опору, вокруг которой может вращаться кулачковый следящий элемент (312). Кулачковый следящий элемент (312) также включает в себя соединительный штифт (346), связывающий дистальный конец (350) кулачкового следящего элемента (312) с вертикальным звеном (310). В результате, кулачковый следящий элемент (312) и вертикальное звено (310) выполнены с возможностью поворота вокруг соединительного штифта (346). Шарнирный штифт (344) установлен между дистальным концом (350) и проксимальным свободным концом (342) кулачкового следящего элемента (312).
Наклоненный кулачок (308) и кулачковый следящий элемент (312) взаимодействуют, поднимая и опуская вертикальное звено (310), заставляя кулачковый следящий элемент (312) шарнирно поворачиваться вокруг шарнирного штифта (344). На этапе эксплуатации, как показано на ФИГ. 8, вал (326) находится во втянутом проксимальном положении так, что выталкиватель (24) скобок и скальпель (36) находятся во втянутом проксимальном положении. Звенья (316, 318) коленно-рычажного механизма находятся в сложенной конфигурации, и вертикальное звено (310) находится в нижнем положении. Проксимальный свободный конец (342) кулачкового следящего элемента (312) соприкасается с самым проксимальным участком наклоненной дистальной поверхности (309). При активации двигателя (306) с целью вращения наклоненного кулачка (308) на протяжении первой половины полного оборота самый дистальный участок (311) наклоненной дистальной поверхности (309) упирается в проксимальный свободный конец (342) кулачкового следящего элемента (312), таким образом выталкивая проксимальный свободный конец (342) дистально. Это заставляет кулачковый следящий элемент (312) вращаться в направлении против часовой стрелки вокруг шарнирного штифта (344). Соответственно, дистальный конец (350) кулачкового следящего элемента (312) выталкивается вверх, при этом вертикальное звено (310) поднимается вверх. При подъеме вертикального звена (310) вверх первое и второе звенья (316, 318) коленно-рычажного механизма выпрямляются или по существу совмещаются друг с другом, таким образом выталкивая вал (326) дистально. При этом выталкиватель (24) скобок и скальпель (36) выдвигаются дистально, таким образом сшивая ткань в месте наложения анастомоза и отсекая лишнюю ткань в пределах анастомоза, как описано выше.
В некоторых вариантах осуществления кулачковый следящий элемент (312) выполнен из скользящих подвижных компонентов, таким образом, дистальный конец (350) проходит дистально от шарнирного штифта (344) при вращении кулачкового следящего элемента (312) в направлении против часовой стрелки, при этом дистальный конец (350) полностью поднимает вертикальное звено (310). Такие скользящие подвижные компоненты могут быть выполнены с возможностью удерживания вертикального звена (310) в вертикальном направлении при вращении кулачкового следящего элемента (312) вокруг шарнирного штифта (344), при этом обеспечивая вертикальное перемещение вертикального звена (310) в ответ на вращение кулачкового следящего элемента (312). В дополнение или в качестве альтернативы кулачковый следящий элемент (312) может образовывать удлиненный паз, выполненный с возможностью приема соединительного штифта (346). Такой паз может быть выполнен с возможностью удерживания вертикального звена (310) в вертикальном направлении при вращении кулачкового следящего элемента (312) вокруг шарнирного штифта (344), при этом обеспечивая вертикальное перемещение вертикального звена (310) в ответ на вращение кулачкового следящего элемента (312). Следует также понимать, что поворот ствола (326) также может быть управляемым в соответствии с идеями заявки на патент США № [досье патентного поверенного № END7287USNP.0606452], озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВРАЩАТЕЛЬНЫМ КУЛАЧКОВЫМ ПРИВОДОМ И ВОЗВРАТОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки.
По мере того, как двигатель (306) продолжает продвигать наклоненный кулачок (308) на протяжении второй половины полного оборота, вал (326) возвращается в проксимальное положение, как показано на ФИГ. 8. Звенья (316, 318) коленно-рычажного механизма возвращаются в сложенное состояние; вертикальное звено (310) возвращается в нижнее положение; и кулачковый следящий элемент (312) поворачивается в направлении по часовой стрелке. В настоящем примере упругий элемент (например, спиральная пружина и т. п.) соответственно смещает вал (326) назад в проксимальное положение. В дополнение или в качестве альтернативы одна или более торсионных пружин могут быть установлены вокруг штифта (348) и/или штифта (349) для упругого смещения звеньев (310, 316) в положение, показанное на ФИГ. 8. В дополнение или в качестве альтернативы торсионная пружина может быть установлена вокруг штифта (344) для упругого смещения кулачкового следящего элемента (312) в положение, показанное на ФИГ. 8. Следует понимать, что при прохождении второй половины полного оборота углового кулачка (308) проксимальный свободный конец (342) кулачкового следящего элемента (312) переходит из зацепления с самым дистальным участком (311) наклоненной дистальной поверхности (309) в зацепление с самым проксимальным участком наклоненной дистальной поверхности (309). Этот переход позволяет кулачковому следящему элементу (312), вращаясь в направлении по часовой стрелке, вернуться в положение, показанное на ФИГ. 8, поскольку наклоненная конфигурация наклоненной дистальной поверхности (309) допускает такое вращение.
В некоторых вариантах двигатель (306) и/или вал (326) могут быть соединены с одним или более датчиками (например, таким как энкодер, герконовое реле и т. п.), выполненными с возможностью отслеживания вращения кулачка (308) и/или смещения вала (326). Такая информация может передаваться или отображаться на блоке управления, связанном с инструментом (10), для использования оператором. В дополнение или в качестве альтернативы такую информацию может обрабатывать модуль управления, который может автоматически остановить двигатель (306) (например, путем динамического торможения и т. п.) после завершения полного оборота кулачка (308) на 360 градусов. Датчики и модули управления различных подходящих типов, которые могут использоваться для обеспечения остановки двигателя (306), будут очевидны специалистам в данной области в контексте идей, изложенных в настоящем документе Конечно, модуль управления может быть выполнен с возможностью управления двигателем (306) для активации любого подходящего числа вращений и т. п. В некоторых случаях управление запуском и остановкой двигателя (306) может осуществляться в соответствии с идеями, изложенными в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, описание которой включено в настоящий документ путем ссылки.
D. ПРИМЕР УЗЛА ПРИВОДА С МЕХАНИЗМОМ РЕЕЧНОЙ ПЕРЕДАЧИ
На ФИГ. 9 показан другой пример альтернативного узла (400) привода, выполненного с возможностью использования с круговым хирургическим сшивающим инструментом (10) для выталкивания выталкивателя (24) скобок и скальпеля (36). Узел (400) привода настоящего примера содержит двигатель (406), ведущую шестерню (408), рейку (410), первое звено (416) коленно-рычажного механизма, второе звено (418) коленно-рычажного механизма, анкер (420) и вал (426). Двигатель (406), первое звено (416) коленно-рычажного механизма, второе звено (418) коленно-рычажного механизма, анкер (420) и вал (426) по существу аналогичны двигателю (206), вертикальному звену (210), первому звену (216) коленно-рычажного механизма, второму звену (218) коленно-рычажного механизма, анкеру (220) и активатору (226) выталкивателя, описанным выше. Аналогично двигателю (206), двигатель (406) может быть управляемым в соответствии с идеями, представленными в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки.
Двигатель (406) соединен с ведущей шестерней (408) посредством приводного вала (440) так, что двигатель (406) инициирует вращение шестерни (408). Ведущая шестерня (408) соединена с рейкой (410) так, что при вращении ведущей шестерни (408) рейка (410) поднимается и опускается. Двигатель (406) настоящего примера выполнен возможностью вращения вперед и в обратном направлении для обеспечения подъема и опускания рейки (410). В частности, при вращении двигателя (406) в одном направлении рейка (410) поднимается вверх, а при вращении двигателя (406) в противоположном направлении рейка (410) опускается вниз. Верхний участок рейки (410) содержит горизонтальный паз (415). Рейка (410) соединена со звеньями (416, 418) коленно-рычажного механизма посредством штифта (414), размещенного в пазу (415). В частности, штифт (414) выполнен с возможностью горизонтального скольжения по пазу (415). Звено (416) коленно-рычажного механизма соединено с валом (426) посредством второго штифта (442), тогда как звено (418) коленно-рычажного механизма соединено с анкером (420) посредством третьего штифта (444).
В результате вращения ведущей шестерни (408) вал (426) выдвигается и втягивается, приводя в движение выталкиватель (24) скобок или скальпель (36). В частности, когда двигатель (406) вращает шестерню (408) в первом направлении, выталкивая рейку (410) вверх, звенья (416, 418) коленно-рычажного механизма выпрямляются и по существу совмещаются друг с другом, таким образом выдвигая вал (426) дистально. При этом выталкиватель (24) скобок и скальпель (36) выдвигаются дистально, таким образом сшивая ткань в месте наложения анастомоза и отсекая лишнюю ткань в пределах анастомоза, как описано выше. Когда двигатель (406) вращает шестерню (408) во втором направлении, выталкивая рейку (410) вниз, звенья (416, 418) коленно-рычажного механизма складываются, таким образом втягивая вал (426) проксимально. Паз (415) приспосабливается к горизонтальному перемещению штифта (414) при подъеме и опускании рейки (410).
Следует понимать, что допускается использование различных способов реверсирования двигателя (406). Например, двигатель (406) может быть связан с микроконтроллером, специализированной интегральной микросхемой (ASIC) и/или модулем управления другого типа, выполненным с возможностью выборочного реверсирования двигателя (406) и остановки двигателя (406). Двигатель (406) также может быть управляемым в соответствии с идеями, представленными в заявке на патент США № [досье патентного поверенного № END7291USNP.0606446], озаглавленной «ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Модуль управления может обмениваться данными с одним или более датчиками (например, таким как энкодер, герконовое реле и т. п.), выполненными с возможностью отслеживания вращения шестерни (408) и/или смещения вала (426). Такую информацию может обрабатывать модуль управления, который может автоматически менять направление вращения двигателя (406) после завершения полного дистального выдвижения вала (426) и впоследствии остановить двигатель (406) (например, посредством динамического торможения и т. п.) после завершения полного проксимального втягивания вала (426). Специалистам в данной области будут очевидны другие подходящие способы, в соответствии с которыми можно управлять двигателем (406), в контексте идей, представленных в настоящем документе.
В качестве еще одного исключительно иллюстративного примера узел (400) привода может быть выполнен так, что двигатель (406) вращает приводной вал (440) только в одном направлении для выдвижения и втягивания вала (426). Например, двигатель (406) может вращать приводной вал (440) в первом направлении для проталкивания рейки (410) по первому диапазону перемещения вверх для продвижения вала (426) дистально посредством звеньев (416, 418) коленно-рычажного механизма. Вал (426) может достичь крайнего дистального положения, когда оба звена (416, 418) коленно-рычажного механизма ориентированы горизонтально. При продолжении вращения приводного вала (440) двигателем (406) в первом направлении вращения, в результате чего ведущая шестерня (410) проходит второй диапазон движения вверх, рейка (410) заставляет звенья (416, 418) коленно-рычажного механизма складываться, таким образом втягивая вал (426) проксимально. Таким образом, может происходить выдвижение и втягивание вала (426) без изменения направления вращения приводного вала (440).
III. ПРОЧАЯ ИНФОРМАЦИЯ
В примерах, показанных на ФИГ. 7–9, двигатели (206, 306, 406) ориентированы соосно с приводными стволами (240, 340, 440) и параллельно стволам (226, 326, 426). Однако вместо этого можно расположить двигатели (206, 306, 406) и в других подходящих ориентациях. Например, в некоторых вариантах осуществления двигатели (206, 306, 406) могут быть установлены перпендикулярно или под любым углом наклона относительно продольной оси приводных валов (240, 340, 440) и/или валов (226, 326, 426). В некоторых таких вариантах можно расположить двигатели (206, 306, 406) внутри пистолетной рукоятки, предложенной в альтернативном варианте узла (70) рукоятки. Двигатели (206, 306, 406) могут быть выполнены с возможностью передачи вращательного перемещения вдоль непараллельных осей путем соединения двигателей (206, 306, 406) со стволами (240, 340, 440) через конические шестерни и т. п.; и/или с применением любой (-ых) другой (-их) подходящей (-их) структуры (структур). Только в качестве примера двигатели (206, 306, 406) могут передавать перемещение на стволы (240, 340, 440) привода в соответствии с идеями, изложенными в заявке на патент США № [досье патентного поверенного № END7287USNP.0606452], озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВРАЩАТЕЛЬНЫМ КУЛАЧКОВЫМ ПРИВОДОМ И ВОЗВРАТОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Подобным образом, узел (70) рукоятки может обеспечивать перпендикулярно ориентированную или наклонно ориентированную пистолетную рукоятку в соответствии с идеями, изложенными в заявке на патент США № [досье патентного поверенного № END7287USNP.0606452], озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВРАЩАТЕЛЬНЫМ КУЛАЧКОВЫМ ПРИВОДОМ И ВОЗВРАТОМ», поданной в тот же день, что и настоящая заявка, описание которой включено в настоящий документ путем ссылки. Другие подходящие способы, которыми наклонно ориентированные двигатели (206, 306, 406) возможно встроить в описанные в настоящем документе инструменты, будут очевидны обычным специалистам в данной области в контексте идей, представленных в настоящем документе.
Хотя примеры представлены здесь в основном в контексте кругового хирургического сшивающего инструмента, следует понимать, что различные описанные в настоящем документе идеи могут быть легко применены к различным другим видам хирургических инструментов. Исключительно в качестве примера различные идеи настоящего документа можно легко применить к линейным сшивающим устройствам (например, эндоскопическому режущему инструменту). Например, различные идеи, изложенные в настоящем документе, можно легко сочетать с различными идеями патентной публикации США № 2012/0239012, озаглавленной «Оснащенный двигателем хирургический режущий инструмент с электрическим узлом управления перемещением активатора», опубликованной 20 сентября 2012 г., описание которой включено в настоящий документ путем ссылки; и/или патентной публикации США № 2010/0264193, озаглавленной «Хирургический сшивающий инструмент с шарнирно-поворачиваемым концевым эффектором», опубликованной 21 октября 2010 г., описание которой включено в настоящий документ путем ссылки, как будет очевидно обычным специалистам в данной области. В качестве другого исключительно иллюстративного примера различные идеи, изложенные в настоящем документе, можно легко применить к оснащенному электроприводом электрохирургическому устройству. Например, различные идеи, изложенные в настоящем документе, можно легко сочетать с различными идеями патентной публикации США № 2012/0116379, озаглавленной «Оснащенное двигателем электрохирургическое устройство с механической и электрической обратной связью», опубликованной 10 мая 2012 г., описание которой включено в настоящий документ путем ссылки, как будет очевидно обычным специалистам в данной области. Другие подходящие типы инструментов, в которых можно применить изложенные в настоящем документе идеи, и различные возможные способы применения изложенных идей к таким инструментам будут очевидны обычным специалистам в данной области.
Следует понимать, что любое одно или более из идей, выражений, вариантов осуществления, примеров и т. д., описанных в настоящем документе, можно скомбинировать с любым одним или более из других идей, выражений, вариантов осуществления, примеров и т. д., описанных в настоящем документе. Поэтому не следует рассматривать описанные выше идеи, выражения, варианты осуществления, примеры и т. д. отдельно друг от друга. В контексте идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны различные подходящие способы, которыми можно комбинировать идеи, представленные в настоящем документе. Предполагается, что такие модификации и вариации включены в объем формулы изобретения.
По меньшей мере, часть идей настоящего документа можно легко объединить с одной или более идеями патента США № 7,794,475, озаглавленного «Хирургические скобки, имеющие сжимаемые или раздавливаемые элементы для закрепления в них тканей, и сшивающие инструменты для размещения таких скобок», выданного 14 сентября 2010 г., описание которого включено в настоящий документ путем ссылки; заявки на патент США № 13/693,430, озаглавленной «Система трансорального введения кругового упора с расширяющим элементом конструкции», поданной 4 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявки на патент США № 13/688,951, озаглавленной «Хирургическая скобка со встроенной подушечкой для отклонения кончика», поданной 29 ноября 2012 г., описание которой включено в настоящий документ путем ссылки; заявки на патент США № 13/706,827, озаглавленной «Хирургический сшивающий инструмент со скобками, имеющими переменную ширину при разных окружностях», поданной 6 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявки на патент США № 13/688,992, озаглавленной «Вращающийся упор для кругового хирургического сшивающего инструмента», поданной 29 ноября 2012 г., описание которой включено в настоящий документ путем ссылки; заявки на патент США № 13/693,455, озаглавленной «Система введения кругового упора с выравнивающим элементом», поданной 4 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявки на патент США № 13/716,313, озаглавленной «Круговой сшивающий инструмент с выбором управления с использованием электропривода и ручного управления, включающий управляющее кольцо», поданной 17 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; заявки на патент США № 13/716,318, озаглавленной «Круговой сшивающий инструмент с электроприводом, входным сигналом вращения и модульным концевым эффектором», поданной 17 декабря 2012 г., описание которой включено в настоящий документ путем ссылки; и/или заявки на патент США № 13/176,323, озаглавленной «Круговой сшивающий инструмент с электроприводом, входным сигналом вращения и блокируемым гибким стволом», поданной 17 декабря 2012 г., описание которой включено в настоящий документ путем ссылки. Различные подходящие способы, в соответствии с которыми можно скомбинировать такие идеи, будут понятны обычным специалистам в данной области.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично включенный в настоящий документ путем ссылки, включен в него только в той степени, в которой включенный материал не противоречит существующим определениям, заявлениям или другим материалам описания, представленным в настоящем описании. Таким образом, в необходимой степени описание, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанный как включенный в настоящий документ путем ссылки, но противоречащий существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включен в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Варианты описанных выше устройств могут применяться в традиционных видах медицинского лечения и процедурах, выполняемых медицинским специалистом, а также в роботизированных видах медицинского лечения и процедурах. Только в качестве примера различные идеи, представленные в настоящем документе, могут быть легко использованы в роботизированной хирургической системе, такой как система DAVINCI™, разработанная компанией Intuitive Surgical, Inc., г. Саннивейл, штат Калифорния, США.
Описанные выше варианты можно выполнить с возможностью утилизации после однократного применения или их можно выполнить с возможностью многократного применения. В каждом или в обоих случаях варианты можно восстановить для повторного применения после, по меньшей мере, одного применения. Восстановление может включать любую комбинацию этапов разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, некоторые варианты устройства можно разобрать, и любое число конкретных фрагментов или частей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей некоторые варианты устройства можно повторно собрать для последующего применения либо в отделении, выполняющем восстановление, либо это может сделать сам пользователь непосредственно перед процедурой. Специалистам в данной области будет понятно, что восстановление устройства может включать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Только в качестве примера: описанные в настоящем документе варианты можно стерилизовать до и/или после процедуры. В одной методике стерилизации устройство помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет из материала «Тайвек» (TYVEK). Впоследствии контейнер и устройство можно поместить в поле излучения, которое может проникать в контейнер, такое как гамма-излучение, рентгеновское излучение или высокоэнергетический поток электронов. Излучение может убивать бактерии на устройстве и в контейнере. Впоследствии стерилизованное устройство можно хранить в стерильном контейнере для дальнейшего применения. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, без ограничений, бета- или гамма-излучение, этиленоксид или пар.
Обычный специалист в данной области может осуществить различные показанные и описанные варианты осуществления настоящего изобретения, дополнительные адаптации способов и систем, описанных в настоящем документе, путем соответствующих модификаций без отступления от объема настоящего изобретения. Некоторые из таких потенциальных модификаций были упомянуты, а другие будут очевидны специалистам в данной области. Например, примеры, варианты осуществления, геометрические формы, материалы, размеры, коэффициенты, этапы и т. п., описанные выше, являются иллюстративными и не являются обязательными. Соответственно, объем настоящего изобретения следует рассматривать в свете представленной ниже формулы изобретения, и следует понимать, что он не ограничивается подробной информацией о конструкции и эксплуатации, показанной и описанной в описании и на рисунках.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВРАЩАТЕЛЬНЫМ КУЛАЧКОВЫМ ПРИВОДОМ | 2014 |
|
RU2670698C9 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВРАЩАТЕЛЬНЫМ КУЛАЧКОВЫМ ПРИВОДОМ И ВОЗВРАТОМ | 2014 |
|
RU2676492C2 |
| ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2670699C9 |
| КРУГОВОЙ СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ОТ ДВИГАТЕЛЯ И ВХОД ВРАЩЕНИЯ, С МОДУЛЬНЫМ КОНЦЕВЫМ ЭФФЕКТОРОМ | 2013 |
|
RU2673376C2 |
| КРУГОВОЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ДВИГАТЕЛЕМ, ВХОДНЫМ СИГНАЛОМ ВРАЩЕНИЯ И БЛОКИРУЕМЫМ ГИБКИМ СТВОЛОМ | 2013 |
|
RU2661719C2 |
| КРУГОВОЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВЫБОРОМ УПРАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРОПРИВОДА И РУЧНОГО УПРАВЛЕНИЯ | 2013 |
|
RU2676523C2 |
| КРУГОВОЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ВЫБОРОМ УПРАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЯ И РУЧНОГО УПРАВЛЕНИЯ, ВКЛЮЧАЮЩИЙ УПРАВЛЯЮЩЕЕ КОЛЬЦО | 2013 |
|
RU2653993C2 |
| ЭЛЕМЕНТ ПРЕДОХРАНИТЕЛЬНОГО ПЕРЕКЛЮЧАТЕЛЯ СШИВАЮЩЕГО ТКАНЬ ИНСТРУМЕНТА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРЕЖДЕВРЕМЕННОГО ОТКРЫТИЯ БРАНШИ | 2012 |
|
RU2620903C2 |
| ХРАПОВОЙ ЭЛЕМЕНТ НА СПУСКОВОМ МЕХАНИЗМЕ ДЛЯ СШИВАНИЯ ТКАНИ ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРЕЖДЕВРЕМЕННОГО ОТКРЫТИЯ БРАНШИ | 2012 |
|
RU2624338C2 |
| ЭЛЕМЕНТ УПОРА СШИВАЮЩЕГО ТКАНЬ ИНСТРУМЕНТА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРЕЖДЕВРЕМЕННОГО ОТКРЫТИЯ БРАНШИ | 2012 |
|
RU2619382C2 |
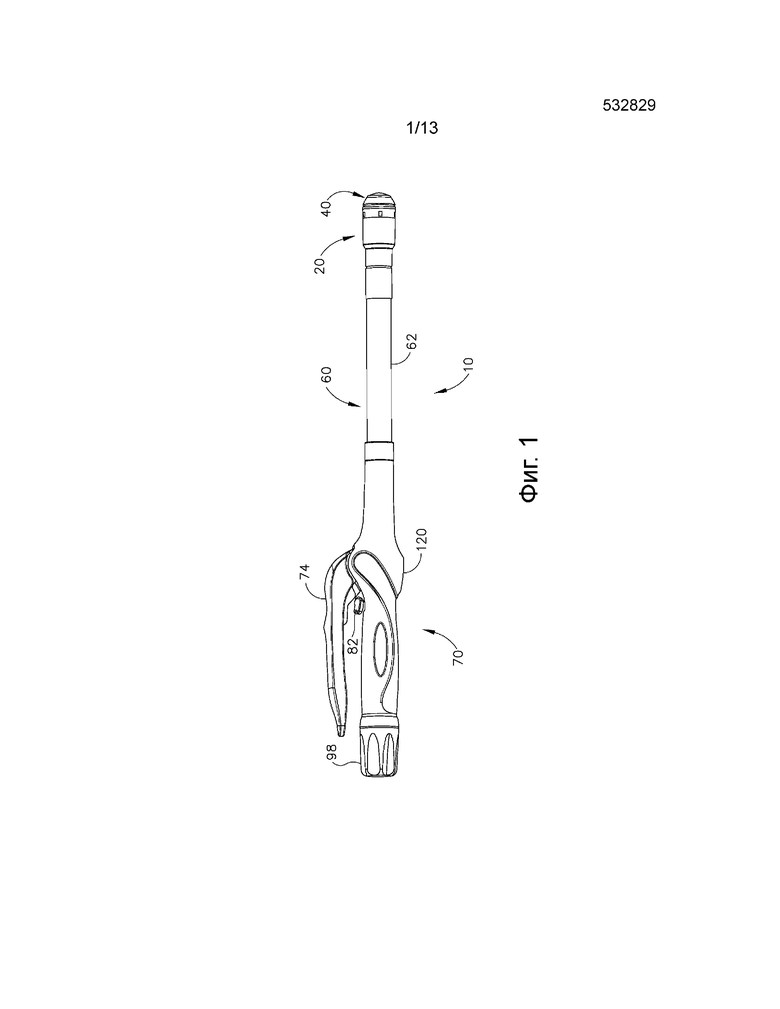
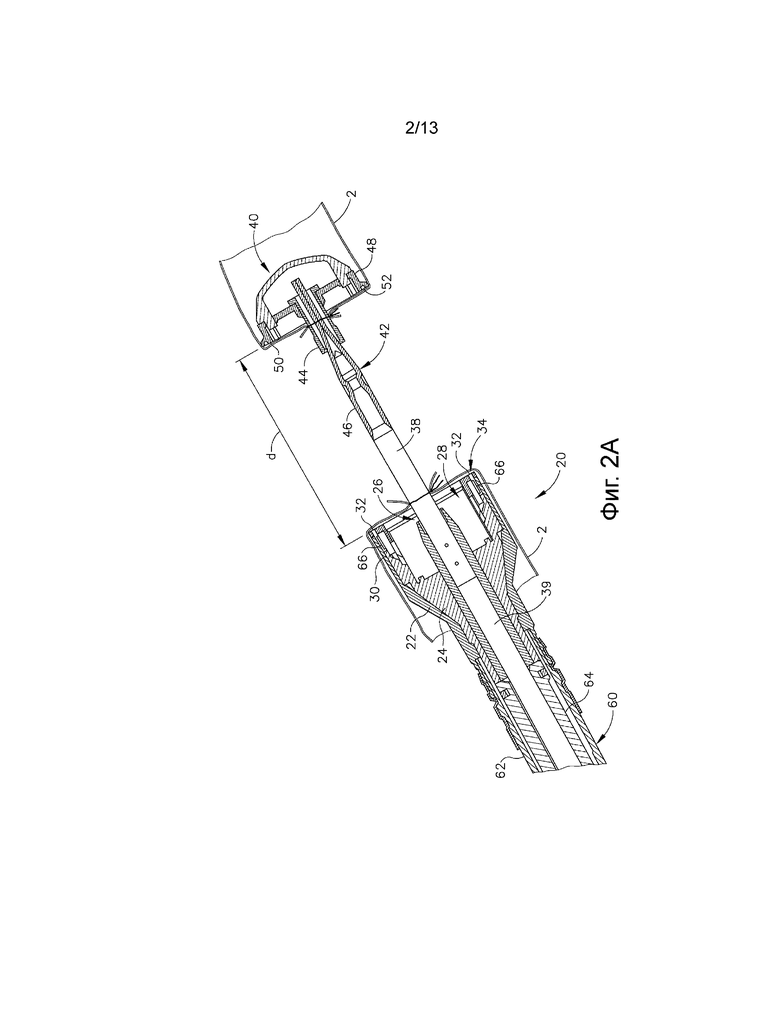
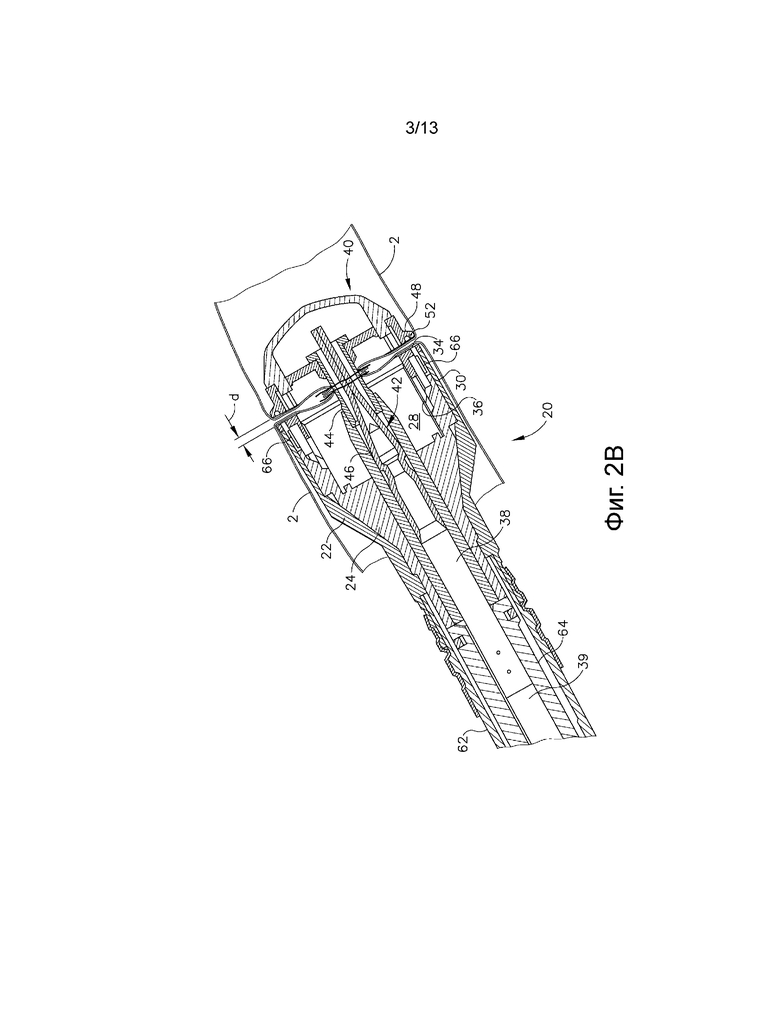
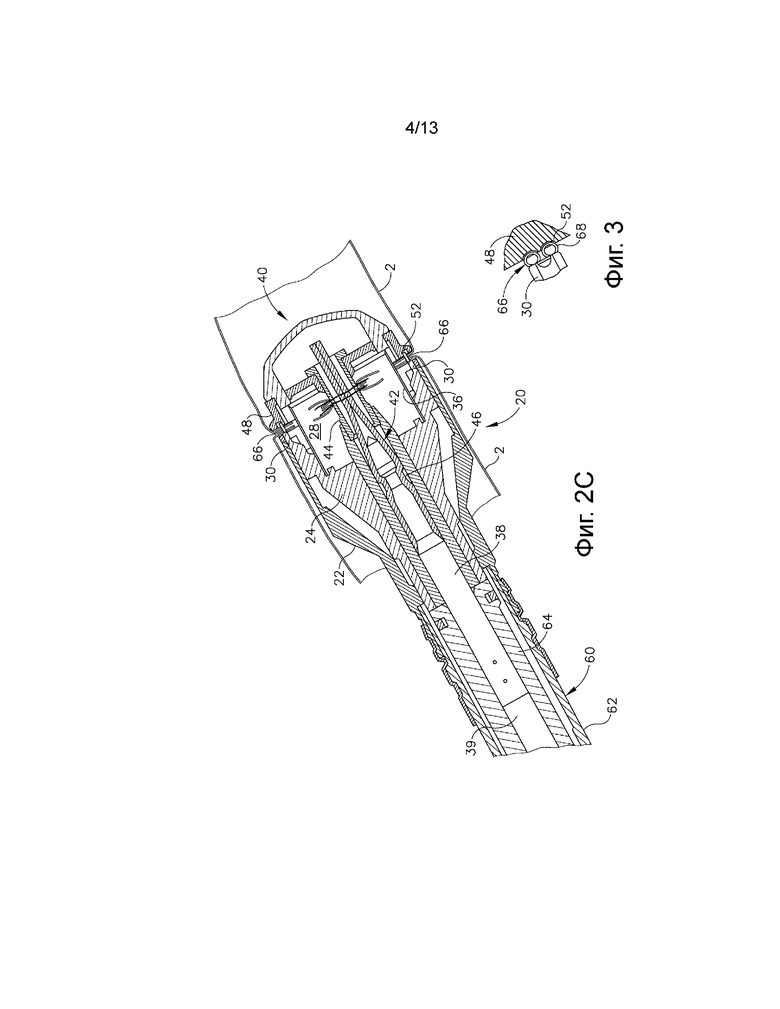
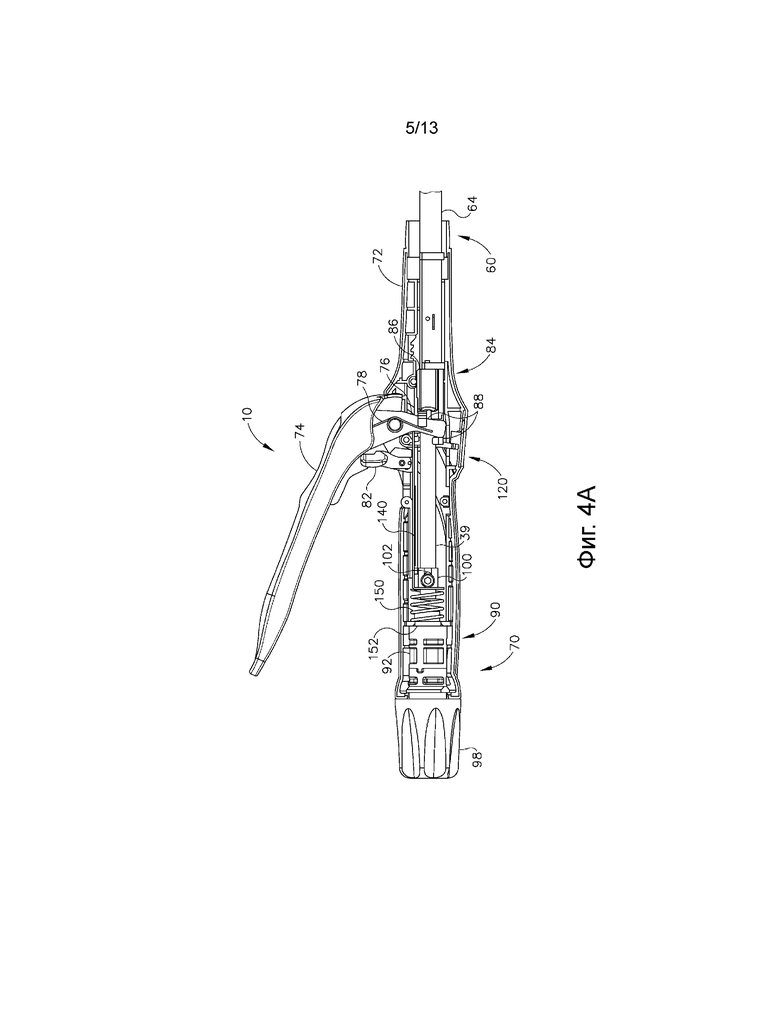
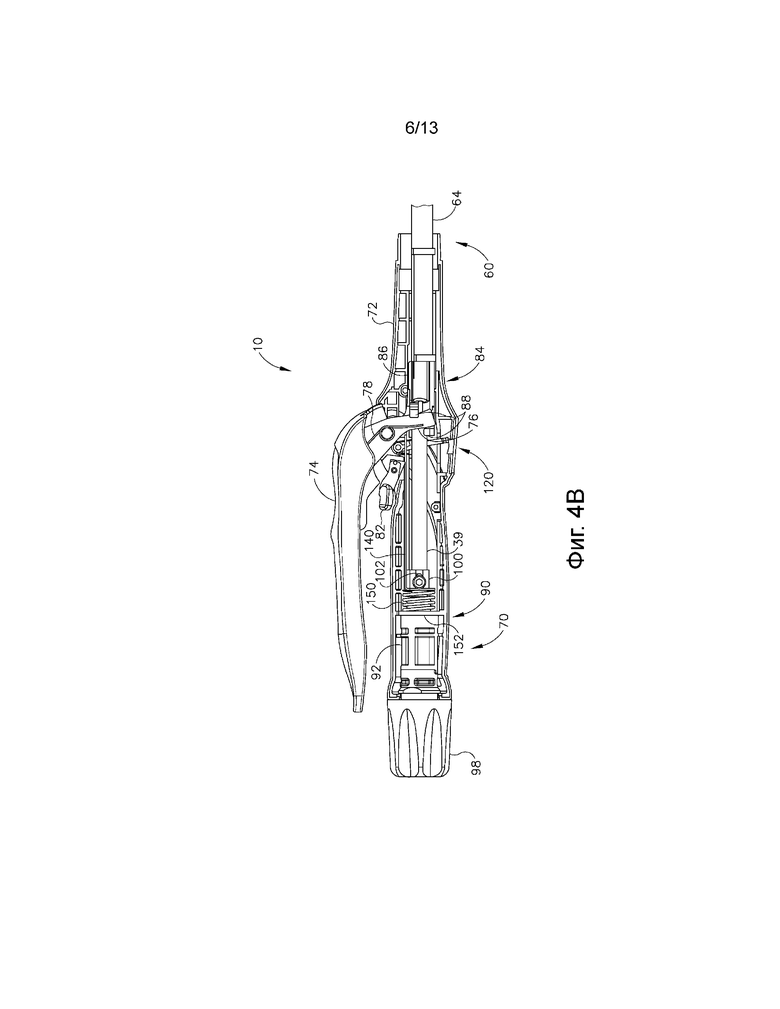
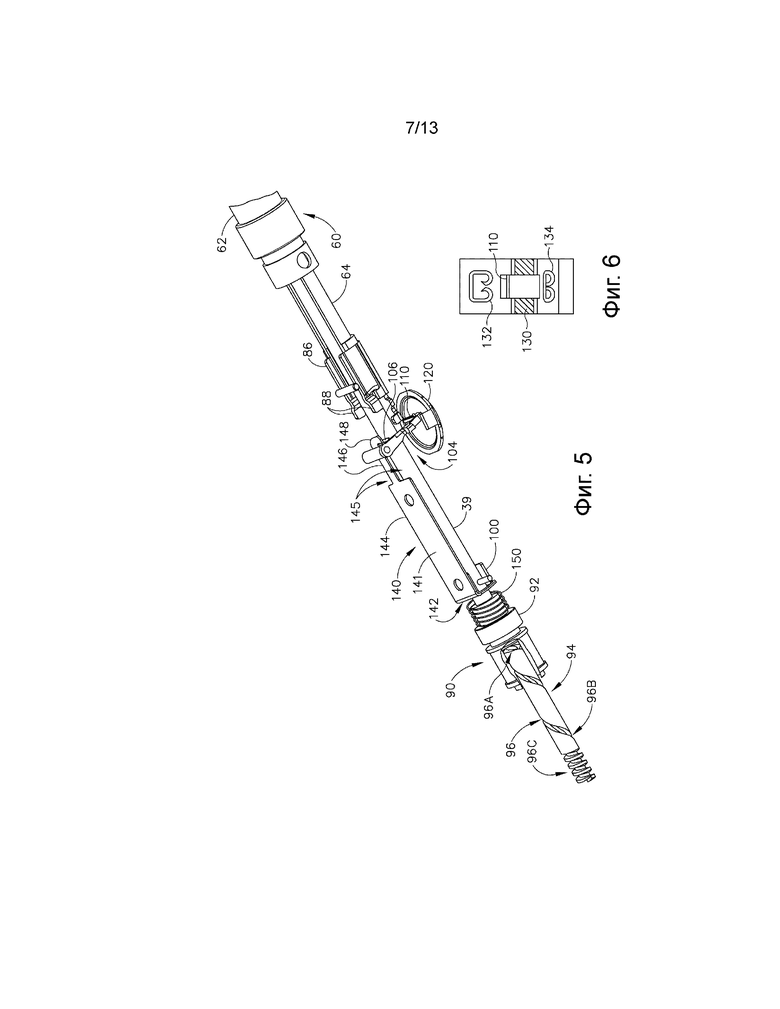
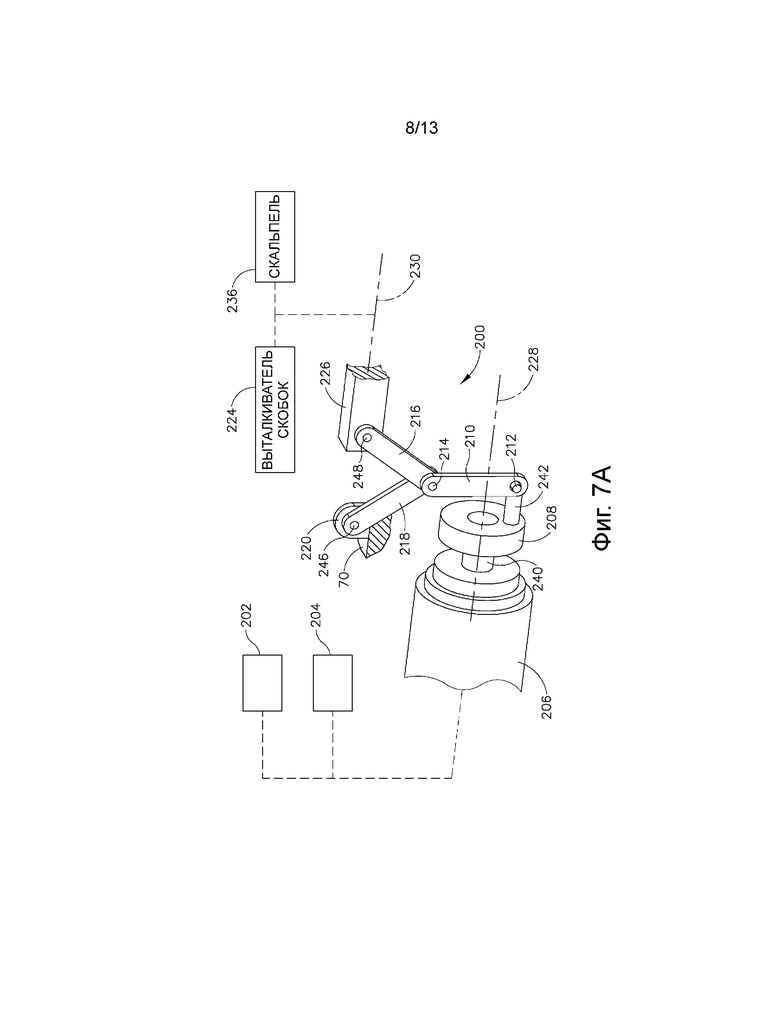
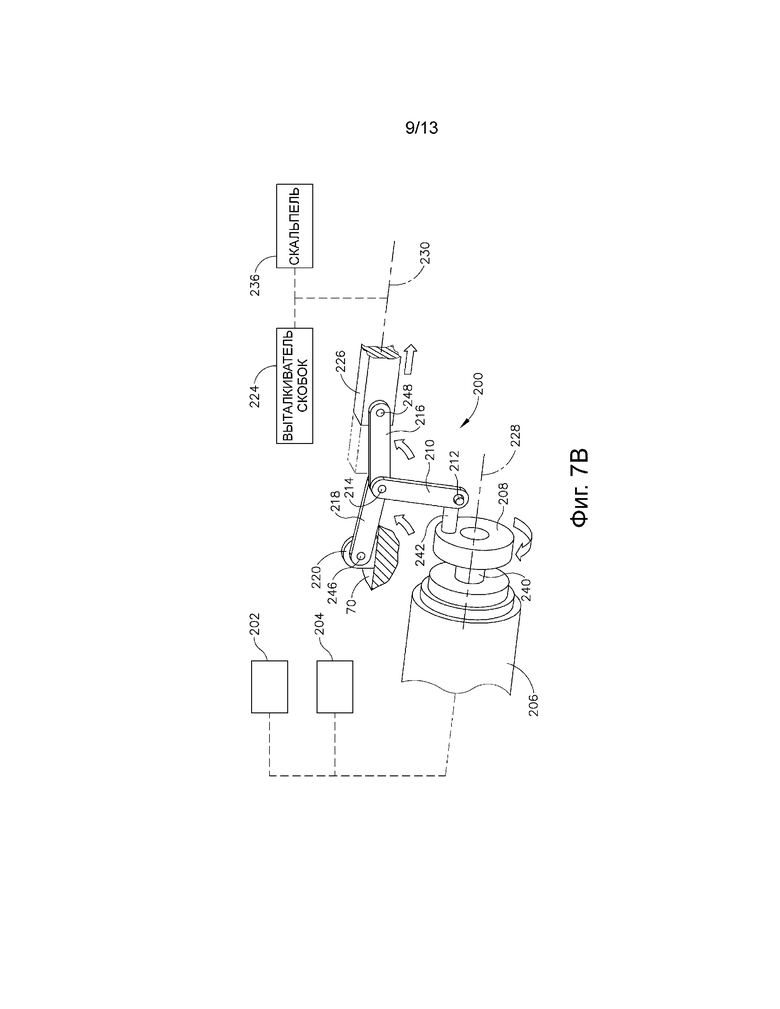
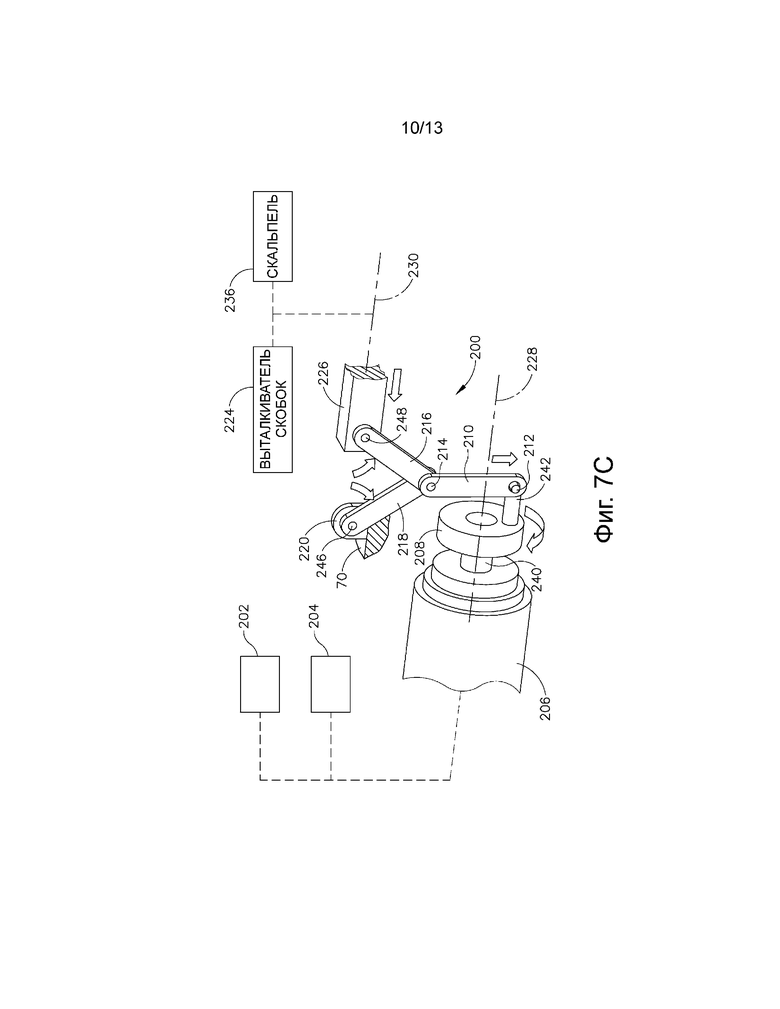
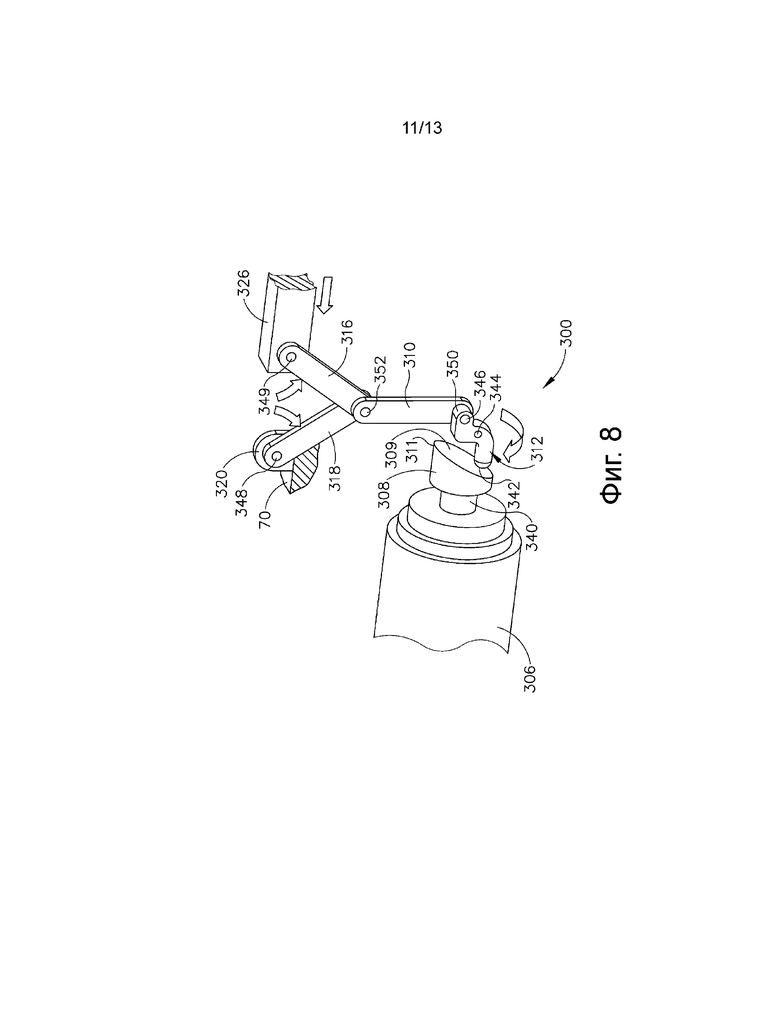
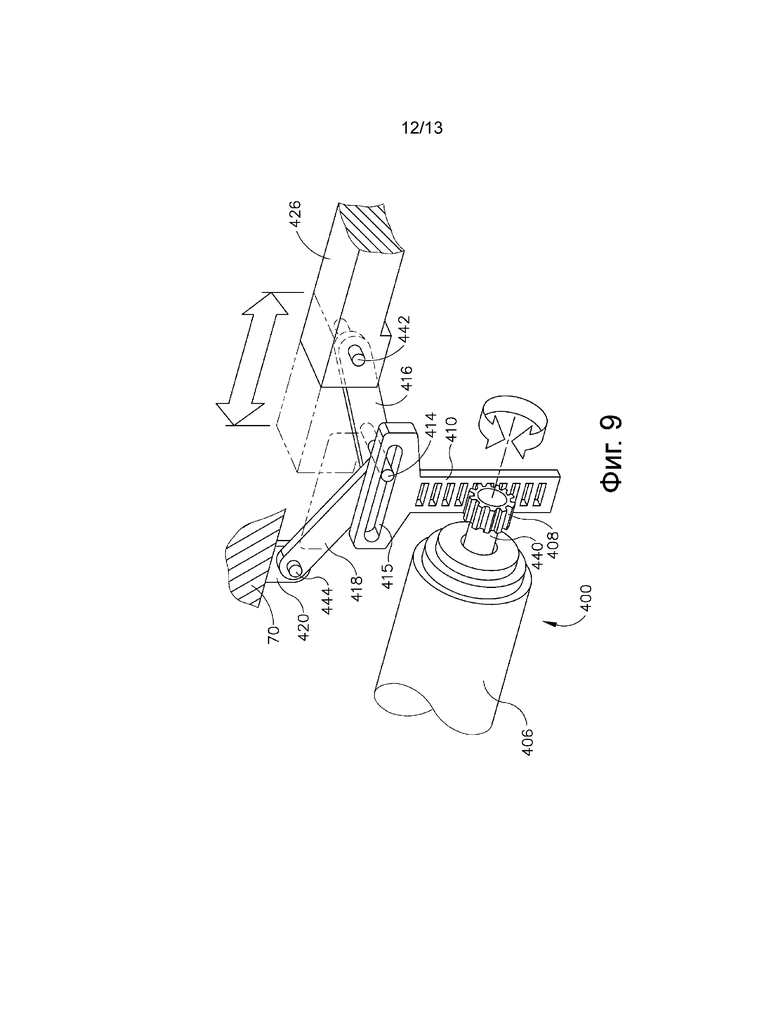
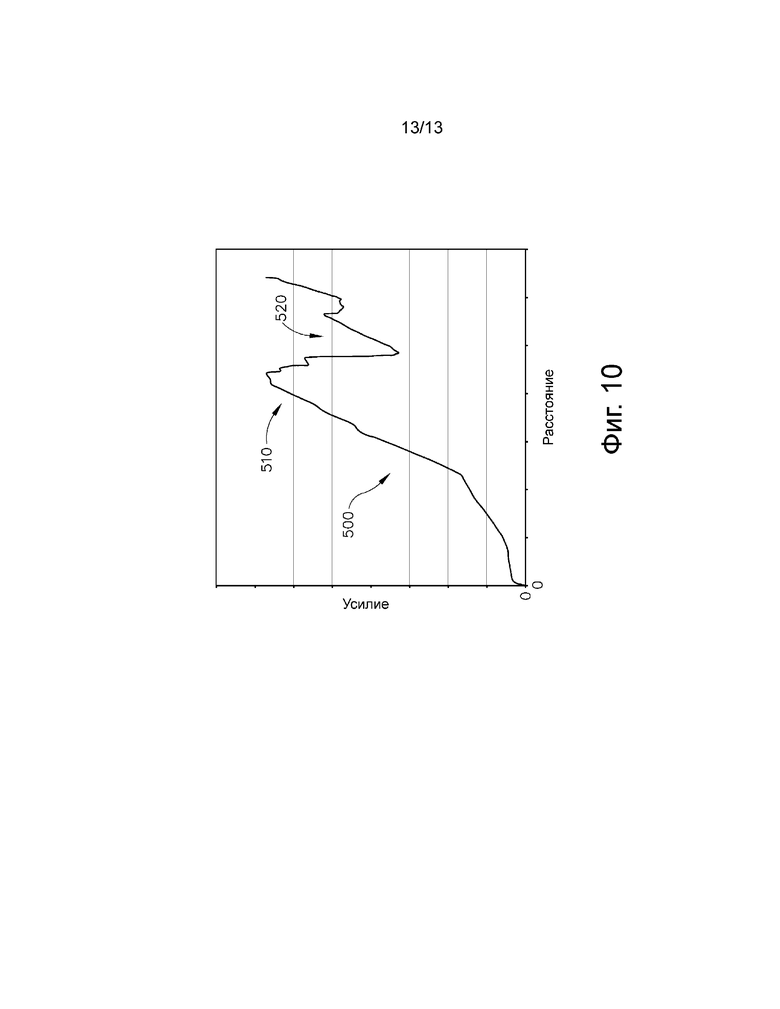
Изобретение относится к медицинской технике, а именно к хирургическому сшивающему устройству. Хирургическое сшивающее устройство содержит концевой эффектор, узел ствола, приводной узел. Выталкиватель скобок концевого эффектора выполнен с возможностью выдвижения в дистальном направлении вдоль концевого эффектора. Приводной элемент узла ствола выполнен с возможностью поступательного перемещения в соединении с выталкивателем скобок. Приводной узел в соединении с приводным элементом выполнен с возможностью поступательного перемещения и содержит двигатель, поворотный приводной элемент в соединении с двигателем, первое звено в соединении с вращательным элементом привода, первое звено коленно-рычажного механизма в соединении с первым звеном и второе звено коленно-рычажного механизма в соединении с первым звеном. Звено коленно-рычажного механизма соединено с приводным элементом, выполненным с возможностью поступательного перемещения. Второе звено коленно-рычажного механизма соединено с механической опорой. Вращение поворотного приводного элемента приводит к инициированию линейного перемещения в первом звене. Первое звено выполнено с возможностью поворота второго звена коленно-рычажного механизма относительно механической опоры и первого звена коленно-рычажного механизма относительно приводного элемента. Приводной элемент выполнен с возможностью поступательного перемещения, выпрямляя таким образом первое и второе звенья коленно-рычажного механизма для передачи приводному элементу линейного перемещения, которое непараллельно линейному перемещению первого звена. Достигается позиционирование хирургического инструмента через отверстие в организме пациента и применение инструмента для регулировки, позиционирования, прикрепления и другого взаимодействия с тканью внутри организма пациента. 10 з.п. ф-лы, 10 ил.
1. Хирургическое сшивающее устройство, содержащее:
(a) концевой эффектор, содержащий выталкиватель скобок, причем выталкиватель скобок выполнен с возможностью выдвижения в дистальном направлении вдоль концевого эффектора;
(b) узел ствола, включающий в себя приводной элемент, выполненный с возможностью поступательного перемещения, в соединении с выталкивателем скобок; и
(c) приводной узел в соединении с приводным элементом, выполненным с возможностью поступательного перемещения, причем приводной узел содержит:
(i) двигатель;
(ii) поворотный приводной элемент в соединении с двигателем;
(iii) первое звено в соединении с вращательным элементом привода; и
(iv) первое звено коленно-рычажного механизма в соединении с первым звеном, причем по меньшей мере одно звено коленно-рычажного механизма также соединено с приводным элементом, выполненным с возможностью поступательного перемещения;
(v) второе звено коленно-рычажного механизма в соединении с первым звеном, причем второе звено коленно-рычажного механизма также находится в соединении с механической опорой;
причем вращение поворотного приводного элемента приводит к инициированию линейного перемещения в первом звене, причем первое звено выполнено с возможностью поворота второго звена коленно-рычажного механизма относительно механической опоры и первого звена коленно-рычажного механизма относительно приводного элемента, выполненного с возможностью поступательного перемещения, выпрямляя таким образом первое и второе звенья коленно-рычажного механизма для передачи приводному элементу, выполненному с возможностью поступательного перемещения, линейного перемещения, которое непараллельно линейному перемещению первого звена.
2. Устройство по п. 1, в котором поворотный приводной элемент и первое звено соединены посредством штифта, причем штифт смещен от центра поворотного приводного элемента.
3. Устройство по п. 1, в котором приводной узел дополнительно содержит кулачковый следящий элемент, причем поворотный приводной элемент содержит наклонную поверхность, причем поворотный приводной элемент и первое звено соединены посредством кулачкового следящего элемента, при этом поворотный приводной элемент выполнен с возможностью перемещения кулачкового следящего элемента под воздействием кулачка.
4. Устройство по п. 3, в котором кулачковый следящий элемент соединен с возможностью поворота с механической опорой.
5. Устройство по п. 1, в котором поворотный приводной элемент выполнен с возможностью поворота на половину оборота для подъема первого звена, причем первое звено выполнено с возможностью полного выдвижения приводного элемента, выполненного с возможностью поступательного перемещения, в ответ на совершение поворотным приводным элементом половины оборота.
6. Устройство по п. 1, в котором поворотный приводной элемент выполнен с возможностью подъема и опускания первого звена при помощи полного оборота, причем первое звено выполнено с возможностью полного выдвижения и полного втягивания приводного элемента, выполненного с возможностью поступательного перемещения, за счет полного оборота поворотного приводного элемента.
7. Устройство по п. 1, в котором двигатель задает продольную ось, при этом первое звено расположено, по существу, перпендикулярно продольной оси.
8. Устройство по п. 1, в котором первое звено коленно-рычажного механизма и второе звено коленно-рычажного механизма соединены с первым звеном посредством одного шарнирного узла, причем первое звено коленно-рычажного механизма и второе звено коленно-рычажного механизма выполнены с возможностью формирования выпрямленной конфигурации для дистального выдвижения приводного элемента, выполненного с возможностью поступательного перемещения, при этом первое звено коленно-рычажного механизма и второе звено коленно-рычажного механизма выполнены с возможностью формирования сложенной конфигурации для проксимального втягивания приводного элемента, выполненного с возможностью поступательного перемещения.
9. Устройство по п. 8, в котором ствол формирует продольную ось, причем первое звено коленно-рычажного механизма и второе звено коленно-рычажного механизма выполнены с возможностью выборочного параллельного совмещения с продольной осью.
10. Устройство по п. 1, в котором поворотный приводной элемент содержит ведущую шестерню, при этом первое звено содержит рейку.
11. Устройство по п. 10, в котором приводной узел дополнительно содержит штифт в соединении с по меньшей мере одним звеном коленно-рычажного механизма, причем рейка содержит паз, при этом штифт расположен с возможностью скольжения в пазу.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| КАТАЛИТИЧЕСКОЕ СРЕДСТВО ДЛЯ КАТАЛИТИЧЕСКОЙ ОБРАБОТКИ ОТРАБОТАВШЕГО ГАЗА, КАТАЛИЗАТОР И СПОСОБ ПОЛУЧЕНИЯ КАТАЛИТИЧЕСКОГО СРЕДСТВА | 1995 |
|
RU2140817C1 |
| US 5540375 A, 30.07.1996 | |||
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |

