Изобретение относится к противопожарной технике, применяемой при тушении лесных пожаров. Изобретение также относится к конструкции роботов, предназначенных для ликвидации чрезвычайных ситуаций.
Борьба с лесными пожарами является одной из важнейших задач лесного хозяйства России. Более 90% лесных пожаров являются низовыми. Верховые и торфяные пожары также начинаются с низовых, в связи с этим разработка новых технологий тушения и локализации низовых пожаров различной интенсивности повышает эффективность системы охраны лесов и поэтому весьма актуальна.
Существует большое количество технологий и технических средств для создания искусственных противопожарных барьеров. К противопожарным барьерам относятся минерализованные полосы, противопожарные разрывы и заслоны, пожароустойчивые опушки, противопожарные канавы, заградительные и опорные полосы. Последние прокладываются в лесу в процессе борьбы с уже возникшим лесным пожаром.
Традиционно для прокладки минерализованных полос используется различная землеройная техника (бульдозеры, тракторы, мотоблоки в агрегате с бульдозерным оборудованием, плугами, клиньями, грунтометательными орудиями, орудиями для расчистки от пней и другим специальным оборудованием).
Для валки деревьев используются харвестеры. Для доставки к месту тушения пожара гусеничной техники, вывоза поваленных деревьев также используется мощная спецтехника. Тушение лесных пожаров с применением землеройной техники достаточно распространено, к недостаткам данного способа можно отнести следующие:
- существенные финансовые затраты;
- затраты на привлечение людских ресурсов по обслуживанию техники;
- зависимость от ландшафтных условий.
Кроме того, несмотря на сравнительно большое количество разработанных землеройных орудий, многие из них имеют недостаточную производительность, выпускаются мелкими сериями и применяются с тракторами высокого класса тяги, т.е. требуют больших энергозатрат.
Для создания заградительных и опорных полос также применяются растворы огнетушащих химических составов длительного действия (например, ОС-5У, Вудгард и Сильван). Эти растворы эффективны, могут легко применяться в условиях каменистых и тяжелых грунтов, а также для создания более широких заградительных полос, но требуют специального приготовления и работают при сравнительно высокой их концентрации (порядка 10…13%), что приводит к потере времени и существенным затратам химикатов.
На сегодняшний день существует сравнительно большое разнообразие технологий и технических средств для тушения пожаров и создания искусственных противопожарных барьеров в лесах, однако, задача быстрого создания эффективных заградительных полос технически обеспечена недостаточно. В связи с этим остается потребность в разработке новых, более эффективных, способов и средств их создания.
Известно множество патентов на роботизированную технику для борьбы с пожарами. Например, к ним можно отнести следующие патенты США US 2360397 A, US 3724554 A, US 3762478 A, US 4420047 A, US 4678041 A, US 4709773 A, US 5836398 A, US 5860479 A, US 6263989 B1, US 6289995 B1, US 6604021 B2, US 7182144 B2, US 7264062 B1, US 7283057 B2, US 7332890 B2, US 7478817 B1, US 7631700 B1.
Одним из первых патентов, в котором описана система пожаротушения, включающая в себя множество дистанционно управляемых транспортных средств со средствами пожаротушения, можно считать патент US 3724554 A «Fire fighting system» выданный еще в 1971 году. Система включала множество роботов двух типов, которые выстраивались в организованную линию и синхронно воздействовали на фронт лесного пожара струями воды и водовоз душной смеси. В систему также входили транспортные и вспомогательные средства для подачи воды к тушащим машинам.
Примерно в то же время в США было запатентовано дистанционно управляемое противопожарное гусеничное транспортное средство (патент US 3762478 A, 1972 г. «Remote controlled hazard-fighting vehicle»), на котором была установлена подвижная башня с пожарным лафетом, к которому прикреплялся гибкий шланг, соединенный с удаленным источником жидкости. Противопожарное средство было оснащено портативным передатчиком и приемником для управления движением и перемещением башни и пожарного лафета и по существу являлось первым запатентованным пожарным роботом.
Развитием этого направления стала «Автомобильная система пожаротушения» по патенту US 5836398 A выданному в 1994 году, которая включала в себя транспортное средство с множеством смонтированных двигателей, систему защиты огня, систему аварийного пожаротушения и систему дистанционного управления. Это устройство было оснащено вращающимся режущим элементом и средством для распыления химического антипирена. Система управления устройством включала видео-, радиолокационные и инфракрасные датчики. Используя вращающиеся режущие элементы, автомобиль продвигался вдоль линии огня, разрушая и вырезая горящую растительность. После вырезания горящая растительность отбрасывалась обратно к огню с помощью воздушной струи. Таким образом, по мере того, как система пожаротушения продвигалась вдоль линии огня, создавался противопожарный разрыв, который был лишен горючего материала.
В России для борьбы с лесными и техногенными пожарами используется следующая роботизированная техника.
1) Робототехнический комплекс «КЕДР» (разработан ФГБУ ВНИИПО МЧС России). Комплекс «КЕДР» включает в себя две единицы: пожарная машина, которая стоит на объекте, и насосно-рукавная машина. «КЕДР» является роботизированным гусеничным вездеходом. Комплекс состоит из:
- унифицированного гусеничного легкобронированного шасси типа «МТЛБ-У»;
- оборудования пожаротушения;
- цистерны запаса воды и пенообразователя;
- средств видеонаблюдения, системы радиосвязи и бортовой системы управления.
2) Мобильный робототехнический комплекс «Пеликан» (разработан НПО «СИБИРСКИЙ АРСЕНАЛ», г. Новосибирск).
Роботизированная пожарная установка «Пеликан» осуществляет пожаротушение в режиме дистанционного управления направленной струей воды или пены. Для дистанционного управления установкой используется беспроводной пульт. Оператор контролирует установку визуально. Предусмотрено беспроводное управление с передвижного пульта на базе автомобиля.
Система пожаротушения робота питается от пожарного рукава, подключенного к автоцистерне или пожарному гидранту.
3) Робототехнический комплекс пожаротушения среднего класса ЕЛЬ-4. Робот оборудован лафетным стволом, манипулятором с гидравлическим хватом и бульдозерным ножом. Управление осуществляется с пульта оператора с помощью видеокамер, установленных на роботе. Управление ходовой базой, средствами пожаротушения и рабочими органами осуществляется по радиоканалу. Имеющиеся видеокамеры дают обзор местности впереди, позади и по сторонам от машины.
4) Робототехнический комплекс тяжелого класса ЕЛЬ-10. Комплекс оборудован лафетным стволом, вода и пена подается на расстояние до 60 метров. На борту комплекса имеется запас 5 тонн огнетушащего вещества. Управление роботом происходит по радиосигналу с машины управления, которая может находиться на расстоянии до 1,5 км.
Для постоянной подпитки робот может тянуть за собой рукавную линию подачи огнетушащего вещества. Робот оснащен бульдозерным ковшом-ножом и гидравлическими клещами-схватами с помощью которых он может убирать со своего пути бревна и другие предметы массой до одной тонны.
6) Многофункциональный робототехнический комплекс пожаротушения на гусеничной базе МРТК-П "Уран-14" (разработан ОАО «766 УПТК»).
Робот оборудован пожарным стволом-монитором который может вращаться на 360 градусов в горизонтальной плоскости и способен транспортировать запас воды.
7) Мобильная роботизированная установка пожаротушения МУПР-С-СП-Э-ИК-ТВ-УП-20(15, 10) (разработана ООО «Инновационные технологии спасения»).
Робот состоит из дистанционно управляемой пожарной самоходной установки и пульта дистанционного управления и оборудован пожарным лафетом. При использовании с напорной рукавной линией робот подает в очаг пожара воду, пену или порошок.
8) Мобильная роботизированная установка газоводяного тушения МРУ ГВТ 150 (разработана ОАО «Пожтехника»). Установка построена на гусеничном шасси высокой проходимости и снабжена клином-отвалом и газоводяной системой пожаротушения.
Управление осуществляется дистанционно по телевизионному и радио каналам связи с выносного пульта, расположенного в автомобиле управления или переносного пульта. Контроль за работой установки и окружающей ее обстановкой осуществляется при помощи соответствующих телекамер и датчиков.
9) Мобильная роботизированная установка «ЛУФ-60» (разработана RECHNER'S Loschsysteme GES.M.B.H и ВНИИПО).
Робот имеет гусеничную основу. Пожаротушение осуществляется с использованием ресурсов, которые подаются по пожарному рукаву либо от гидранта, либо от пожарной машины, либо от другого источника с водой.
Зарубежные пожарные роботы в целом аналогичны вышеописанным. К таким роботам можно отнести малогабаритную мобильную установку пожаротушения LUF-30, пожарный робот Magirus TAF 20, многофункциональную роботизированную пожарную машину MVF-5 от хорватской компании DOK-ING, пожарный робот «Thermite RS1-T2» компании Howe and Howe Technologies, китайский пожарный робот RXR-M40D-1, мобильный противопожарный робот Firerob, разработанный немецкой фирмой Telerob, робот-пожарный FirerobFiremote 4800 компании Ryland Research Limited (Великобритания), робот пожаротушения JMX-LT50, разработанный Научно-исследовательским институтом Министерства общественной безопасности «Шанхайский пожарный научно-исследовательский институт» (Китай).
Известны российские изобретения в области роботизированного пожаротушения.
По патенту РФ №2319530 известен роботизированный пожарный комплекс, который содержит две и более роботизированные установки пожаротушения, включающие в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи и пульт управления, в котором формируются управляющие команды по наведению ствола.
По патенту РФ №2580779 известен мобильный роботизированный комплекс пожаротушения (МРКП), который состоит из ходовой части, корпуса с отсеками для силовой части, для системы пожаротушения и бортовой системы управления, а также из специального оборудования, включающего бульдозерный отвал, расположенный в передней части корпуса, лафетный пожарный ствол. При этом комплекс имеет систему дистанционного управления и видеонаблюдения, радиотелеметрии и освещения; систему самоорошения, систему тушения компрессионной пеной.
По патенту РФ №2437695 известна машина для прокопки противопожарной полосы, которая содержит плуг, выполненный в виде установленных с возможностью вращения с разными скоростями конусных и цилиндрических шнеков.
По патенту РФ №2584529 известен способ и устройство для локализации торфяных пожаров, заключающийся в том, что в отрытую траншею устанавливают противопожарный экран. Экран выполнен из кремнеземной ткани с подземной и наземной частями. Подземная часть огнезащитного экрана опускается в траншею вдоль дальней стенки, образуя в ней равномерный теплоизолирующий воздушный зазор. Выступающая над поверхностью почвы (надземная) часть огнезащитного экрана обеспечивает предотвращение переноса тлеющей торфяной крошки через заградительную полосу.
По патенту РФ №2183486 известна противопожарная грунтометно-пескоструйная машина, снабженная барабанно-ножевым грунторубильным устройством и шнеками, которые выбрасывают на поверхность грунт или песок и локализуют поверхность горящего леса от пожара.
По патенту РФ №2245179 известен автоматизированный способ локализации лесных пожаров путем отжига лесных горючих материалов от заградительной полосы во встречном направлении фронту пожара, который предполагает использование дистанционного управляемого мобильного роботизированного комплекса, содержащего огнемет и роторно-винтовые движители, обеспечивающие по ходу передвижения одновременную прокопку заградительной полосы.
Таким образом, известные противопожарные робототехнические комплексы представляют собой самоходные телеуправляемые устройства, оснащенные комплексом (набором) различных инструментов типа пожарный лафет, отвал, плуг, манипулятор и т.п. в различных сочетаниях.
Аналогами предлагаемого способа тушения в различных аспектах отличительных признаков частично являются следующие технические решения:
- «Fire fighting system» по патенту US 3724554 A;
- «Способ доставки роботехнического комплекса повышенной проходимости к месту пожара и проведению спасательных работ и устройство для его реализации» по патенту РФ №2553016;
- «Способ прокладки противопожарных минерализованных полос и устройство для его осуществления» по патенту РФ №2472549.
Недостатком аналогов по патенту US 3724554 A «Fire fighting system» и по патенту РФ №2472549 «Способ прокладки противопожарных минерализованных полос и устройство для его осуществления» является функциональная ограниченность и недостаточная комплексность выполнения операций, что приводит к их недостаточной эффективности при тушении лесных пожаров.
Аналогами некоторых элементов предлагаемого роботизированного комплекса для осуществления способа тушения лесных пожаров в какой-то степени является «Remote controlled hazard-fighting vehicle» по патенту US 3762478 A в виде гусеничного транспортного средства на котором установлена подвижная башня с пожарным лафетом, к которому прикреплялся гибкий шланг, соединенный с удаленным источником жидкости и «Транспортное средство для тушения пожаров» по патенту РФ №2438740, которое содержит тяговое шасси, на котором установлены стрела с гидравлическим захватывающим устройством с фрезами для резки металла и древесины, плуг для создания огнепреградительной полосы, отвал для создания огнепреградительного вала, насос низкого давления, емкость для воды.
Наиболее близким к заявленному изобретению в области устройств можно считать изобретение «Smart compact indoor firefighting robot for extinguishing a fire at an early stage» по патенту США US 8973671 B2.
В этом патенте описан робот пожаротушения, включающий роботизированную платформу, имеющую теплоизоляцию с системой охлаждения, множество электродвигателей, установленных на роботизированной платформе, множество передач, приводимых в действие множеством двигателей, управляемую видеокамеру, установленную на роботизированной платформе, вычислительные средства, запрограммированные для борьбы с пожарами, прибор дистанционного управления, источник питания, цистерну с водой, систему самоорошения робота водой, систему пожаротушения, включающую множество огнетушителей и поворотное устройство. Пульт дистанционного управления может отображать изображения с указанной камеры вождения и информацию от вычислительных средств робота.
Наиболее близким к заявленному изобретению в области способов тушения лесных пожаров является способ описанный Правилами тушения лесных пожаров, утвержденными Министерством природных ресурсов и экологии РФ (https://rg.ru/2014/08/15/pojari-dok.html).
В соответствие с Правилами тушение лесных пожаров осуществляется следующим образом (далее цитируются те статьи этого документа, которые относятся непосредственно к способу тушения лесных пожаров с сохранением оригинальной нумерации).
Ст. 33 Начальным действием по тушению лесного пожара является его обследование. Обследование лесного пожара проводится руководителем тушения лесного пожара и работниками подразделений лесопожарных организаций по всей кромке лесного пожара.
Ст. 34 Обследование лесного пожара проводится с использованием наземных, авиационных и (или) космических средств в целях выявления:
а) вида и скорости распространения лесного пожара, его контура и примерной площади;
б) основных типов (видов) горючих материалов;
в) тактических частей лесного пожара (фронт, фланги и тыл);
г) наиболее опасного направления распространения лесного пожара (создание угрозы ценным лесным насаждениям и (или) насаждениям, в которых возможен переход лесного пожара в верховой, объектам экономики и населенным пунктам);
д) естественных и искусственных препятствий для распространения лесного пожара;
е) возможного усиления или ослабления лесного пожара вследствие особенностей лесных участков и рельефа местности на пути его распространения, а также из-за изменений метеорологической обстановки;
ж) возможности подхода, подъезда к кромке лесного пожара и применения механизированных средств локализации и тушения лесного пожара;
и) источников водоснабжения и возможности их использования;
к) опорных полос для проведения отжига и условий прокладки минерализованных полос;
л) безопасных мест стоянки транспортных средств, расположения людей;
м) путей отхода лиц, осуществляющих тушение лесного пожара, на случай возникновения опасности усиления огня, возможных мест укрытия.
После обследования лесного пожара составляется схема тушения лесного пожара и производится расчет сил и средств, необходимых для его тушения.
Ст. 36. При тушении крупных лесных пожаров с целью обеспечения руководства и взаимодействия, руководитель тушения лесного пожара составляет схему тушения лесного пожара (далее - Схема тушения), на которой отображаются основные элементы принятого им плана выполнения работ, в соответствии с пунктом 35 настоящих Правил.
Ст. 51 Локализация лесного пожара достигается путем выполнения комплекса действий, направленных на предотвращение возможности дальнейшего распространения горения путем создания минерализованных полос и (или) полностью потушенных участков кромки по всему периметру лесного пожара и условий для его ликвидации имеющимися силами и средствами пожаротушения.
Ст. 52 Первоначальным этапом локализации лесного пожара является остановка его распространения, включающая в себя действия лесопожарных организаций, направленные на остановку распространения кромки лесного пожара, в первую очередь, на опасных и критических направлениях, на которых может возникнуть угроза ценным насаждениям, населенным пунктам и объектам экономики.
Ст. 55 При тушении лесных пожаров используют два метода - прямой и косвенный. Прямой метод применяется, в основном, при тушении низовых лесных пожаров слабой и средней интенсивности в случаях, когда есть возможность непосредственно потушить кромку лесного пожара и (или) создать у кромки лесного пожара заградительную полосу. Косвенный метод применяется при тушении низовых сильных и верховых лесных пожаров, когда линия остановки огня выбирается на определенном расстоянии от кромки лесного пожара.
Ст. 56 При тушении лесных пожаров применяются следующие способы и технические средства:
а) захлестывание огня (сбивание пламени) по кромке лесного пожара;
б) засыпка кромки лесного пожара грунтом;
в) прокладка заградительных и опорных минерализованных полос;
г) отжиг горючих материалов перед кромкой лесного пожара;
д) тушение водой и огнетушащими растворами, в том числе с применением авиации.
Ст. 57 Захлестывание огня (сбивание пламени) по кромке лесного пожара применяют для остановки продвижения огня при тушении низовых лесных пожаров слабой и средней интенсивности.
Ст. 58 Засыпка кромки лесного пожара грунтом применяется на легких песчаных и супесчаных слабо задерненных почвах, когда применение захлестывания огня малоэффективно, а быстрая прокладка заградительных полос невозможна.
Ст. 59 Прокладка заградительных и опорных минерализованных полос производится тракторной техникой с почвообрабатывающими орудиями, ручными (в том числе механизированными) орудиями в целях:
а) локализации лесных пожаров без предварительной остановки их распространения непосредственным воздействием на кромку;
б) локализации лесных пожаров, распространение которых было приостановлено;
в) применения отжига от опорных полос.
Ст. 62 Тушение водой и огнетушащими растворами применяется в целях осуществления прямого тушения кромки лесных пожаров и (или) косвенного тушения низовых сильных, подземных и верховых лесных пожаров путем создания временных опорных полос для проведения отжига. При тушении лесных пожаров используются огнетушащие растворы, обладающие экологической безопасностью для окружающей среды и санитарной безопасностью для людей, работающих в зоне лесного пожара.
Ст. 66. После локализации лесного пожара руководитель тушения лесного пожара обязан лично осмотреть границы лесного пожара или привлечь для осмотра частей кромки лесного пожара работников подразделений лесопожарных организаций в целях подтверждения надежности локализации всей кромки лесного пожара. В местах, где выявлена необходимость усилить локализацию, немедленно проводятся меры по прокладке дополнительных заградительных и минерализованных полос.
Ст. 67 Ликвидация лесного пожара является завершающим действием, когда устанавливается, что отсутствуют условия для возобновления лесного пожара, после завершения работ по дотушиванию и окарауливанию. После ликвидации лесного пожара производится прекращение всех работ по тушению и возврат сил и средств пожаротушения к местам постоянной дислокации или направление их на тушение других лесных пожаров. В случае, когда на ликвидированном лесном пожаре в течение 5 дней произошло возобновление горения от потушенных частей лесного пожара, данный пожар считается возобновившимся.
Ст. 68 Наблюдение за локализованным лесным пожаром и его дотушивание заключается в ликвидации очагов горения, оставшихся на пройденной пожаром площади после его локализации. Проводится дотушивание всех очагов горения в полосе шириной до 50-70 метров (на расстоянии двойной высоты древостоя) от локализованной кромки лесного пожара в целях исключения возможного переброса огня за границы локализованной кромки.
Ст. 69 Предотвращение возобновления лесного пожара (окарауливание пожара) состоит в осмотре пройденной огнем площади с целью предотвращения его возобновления от скрытых очагов горения, не выявленных при дотушивании. Окарауливание проводится до полного прекращения горения на кромке лесного пожара и организуется в процессе его остановки, когда по мере продвижения вдоль ликвидируемой кромки лесного пожара оставляется часть работников, которые ликвидируют очаги загораний за опорной полосой и по кромке лесного пожара.
Локализация лесного пожара достигается путем создания минерализованных полос и (или) полностью потушенных участков кромки по всему периметру лесного пожара.
При тушении лесных пожаров применяются следующие способы и технические средства:
а) захлестывание огня (сбивание пламени) по кромке лесного пожара;
б) засыпка кромки лесного пожара грунтом;
в) прокладка заградительных и опорных минерализованных полос;
г) отжиг горючих материалов перед кромкой лесного пожара;
д) тушение водой и огнетушащими растворами, в том числе с применением авиации.
Тушение водой и огнетушащими растворами применяется в целях осуществления прямого тушения кромки лесных пожаров и (или) косвенного тушения низовых сильных, подземных и верховых лесных пожаров путем создания временных опорных полос для проведения отжига.
После локализации лесного пожара руководитель тушения лесного пожара обязан лично осмотреть границы лесного пожара или привлечь для осмотра частей кромки лесного пожара работников подразделений лесопожарных организаций в целях подтверждения надежности локализации всей кромки лесного пожара. В местах, где выявлена необходимость усилить локализацию, немедленно проводятся меры по прокладке дополнительных заградительных и минерализованных полос.
Ликвидация лесного пожара является завершающим действием, когда устанавливается, что отсутствуют условия для возобновления лесного пожара, после завершения работ по дотушиванию и окарауливанию.
Наблюдение за локализованным лесным пожаром и его дотушивание заключается в ликвидации очагов горения, оставшихся на пройденной пожаром площади после его локализации.
Предотвращение возобновления лесного пожара (окарауливание пожара) состоит в осмотре пройденной огнем площади с целью предотвращения его возобновления от скрытых очагов горения, не выявленных при дотушивании.
Таким образом, известным способом тушения лесных пожаров может считаться способ, в котором:
- вначале производится обследования лесного пожара с использованием наземных, авиационных и (или) космических средств,
- затем производится локализация лесного пожара путем непосредственного тушения кромки лесного пожара водой, огнетушащими растворами и грунтом, также прокладки заградительных и опорных минерализованных полос с последующим проведением отжига,
- после чего производится наблюдение за локализованным лесным пожаром и его дотушивание.
Недостатком известного способа является его высокая трудоемкость, а также опасность для жизни пожарных, осуществляющих его реализацию.
Чтобы снизить опасность и трудоемкость известного способа тушения пожаров предлагается комплексно роботизировать все операции тушения - обследование, прокладку заградительных и опорных минерализованных полос, тушения водой и огнетушащими растворами, наблюдение и дотушивание.
Так как площадь лесных пожаров зачастую составляет десятки тысяч гектаров, то их тушение водой требует колоссальных объемов воды и часто становится невозможным вследствие отсутствия близких источников воды достаточной мощности, а также недостаточных транспортных возможностей пожарных подразделений по доставке или перекачке воды в зону пожаров.
Чтобы повысить эффективность заградительных и опорных минерализованных полос и огнезащитных барьеров необходимо очень оперативно контролировать состояние фронта пожара новейшими техническими средствами и быстро подавлять локальные прорывы пламени через них, используя пожарные роботы. Что и предлагается делать в новом способе тушения.
Раньше это было практически невозможно сделать даже при использовании средств авиационного наблюдения, так как плотный слой дыма очень часто скрывает очаги и фронт пожара, поэтому обнаружить места прорыва пламени было очень сложно. Еще сложнее было оперативно обнаружить места прорыва пламени визуально с земли, так как фронты пожаров чрезвычайно растянуты и труднодоступны, а нахождение людей или транспортных средств в зоне лесного пожара опасно для жизни персонала пожарных команд и приводит к жертвам среди пожарных.
В последние годы стали появляться высокоэффективные средства наблюдения на основе дронов-коптеров с дистанционным управлением и спектральными и инфракрасными FLIR или SWIR камерами видеонаблюдения, способными распознавать пожарную ситуацию даже через слой дыма значительной плотности. Однако эта возможность известными способами никак не учитывается.
Лесной пожар - это сложное комплексное явление, эффективное тушение которого возможно путем применения множества роботизированных машин, согласованно работающих одновременно, но выполняющих разные взаимодополняющие функции.
Общим недостатком известных роботизированных комплексов для тушения пожаров является их высокая стоимость. Это происходит от желания инженеров поднять эффективность и универсальность робота, для чего на одно мобильное шасси одновременно устанавливаются несколько разных типов средств пожаротушения. В результате, при выполнении какой либо одной операции все остальные рабочие органы такого комплекса бездействуют, а пожарный робот получается дорогим и малофункциональным.
Следует признать, что, несмотря на большое разнообразие пожарных роботов и средств тушения пожаров, эффективного средства тушения лесных пожаров еще не существует. Подтверждением этому могут служить показатели ежегодного ущерба от лесных пожаров, которые только для России колеблются в пределах от 20 до 100 миллиардов рублей ежегодно. Аналогичная ситуация наблюдается во всех странах мира, имеющих леса. Например, в конце 2017 года возник лесной пожар в штате Калифорния, США. На борьбу с огнем было направлено около 5700 пожарных. Тем не менее, всего лишь за несколько часов в предместьях Лос-Анжелеса возникли и стали быстро распространяться шесть крупных очагов пожара на территории десятков тысяч гектаров. Почти 200 тысяч жителей были эвакуированы из опасных районов. Многим пришлось бежать оттуда ночью, спасаясь от быстро движущегося огня. Пожары принесли с собой страшные разрушения - сгорели тысячи домов, уничтожена большая часть плантаций авокадо. Ущерб по разным оценкам составил порядка 270-350 млн. долларов.
Комплексное использование пожарных роботов различной конструкции и современных средств оперативного контроля пожарной обстановки позволяет создать новый высокоэффективный способ тушения лесных пожаров.
Предложен новый способ тушения лесных пожаров и роботизированный комплекс для его осуществления.
Основные отличия заявляемого способа - заключаются в следующем.
От известного способа тушения лесных пожаров, включающего обследование лесного пожара с использованием наземных, авиационных и (или) космических средств, локализацию пожара путем прокладки заградительных и опорных минерализованных полос, тушения водой и огнетушащими растворами, а также наблюдение за локализованным лесным пожаром и его дотушивание, предложенный способ отличается тем, что:
- для прокладки заградительных и опорных минерализованных полос в местах их прокладки дистанционно производят валку леса с помощью одной или нескольких роботизированных платформ, оборудованных приспособлениями для валки леса;
- дистанционно прокладывают минерализованные полосы с помощью одной или нескольких роботизированных платформ, оборудованных траншеекопателем или грунтометом, а также используя устройства для пуска отжига (поджигания напочвенного покрова с целью пуска встречного огня);
- пуск отжига (поджигание напочвенного покрова с целью пуска встречного огня) при необходимости производят дистанционно с помощью роботизированных платформ, оборудованных устройством для поджигания напочвенного покрова, в местах, в которых предварительно сформированы минерализованные полосы или иные препятствия для распространения пожара, например, установлены огнезащитные экраны. С этой целью устройства для пуска отжига размещают на роботизированных платформах, преимущественно на тех, которые оборудованы траншеекопателем или грунтометом;
- наблюдение за лесным пожаром ведут дистанционно с помощью одного или нескольких коптеров, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR и/или систем наблюдения роботизированных платформ;
- в случае обнаружения вероятности или факта пересечения фронтом пламени пожара созданной минерализованной и отожженой полосы на отдельных участках, направляют на эти участки одну или несколько роботизированных платформ, оборудованных установками для тушения пламени струей воды и/или пены, и с их помощью дистанционно тушат пламя на этих участках, предотвращая прорыв.
Сущностью предложенного способа тушения лесных пожаров является новая комбинация в принципе известных действий, которые ранее производились не взаимосвязано, и отличается от известной процедуры тем, что тушение пожаров водой производят не по всей кромке пожара, а только в местах прорыва фронта пожара через минерализованные полосы. Размер этих участков на порядки меньше, чем длина фронта лесного пожара, поэтому решить эту задачу намного проще. Применение предложенного способа позволит сэкономить значительное количество воды, тушащих средств, других материальных ресурсов, и при этом значительно поднять эффективность пожаротушения, исключить риск для жизни пожарных, так как все эти действия осуществляются дистанционно роботизированными средствами и не требуют присутствия людей в опасной зоне пожара.
Другим в принципе известным действием является то, что, что многократные обследования фронта лесного пожара, которые необходимо производить в соответствии с требованиями руководящих документов, производятся с использованием коптеров, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR и/или систем наблюдения роботизированных платформ. Это позволяет поднять оперативность и эффективность наблюдения процесса пожаротушения и, самое главное, исключить риск для жизни пожарных, так как все эти действия осуществляются дистанционно роботизированными средствами и коптерами с высокоэффективными тепловизионными камерами SWIR или FLIR, позволяющими с высокой точностью обнаружить очаги пламени даже под толстым слоем дыма, исключающим их визуальное обнаружение.
Изобретенная последовательность, не является очевидной, так как содержит признаки новизны в виде неочевидной последовательности применения части ранее известных из технического уровня роботизированных средств, и части новых роботизированных средств (роботизированной платформы для валки леса и роботизированной платформы с траншеекопателем или грунтометом), которые не следуют из технического уровня.
Техническим результатом заявляемого способа является повышение эффективности тушения лесных пожаров, снижение опасности и трудоемкости процесса тушения за счет его роботизации.
Предложенный способ позволяет снизить опасность для жизни пожарных и трудоемкость тушения пожаров за счет комплексной роботизации всех операций тушения.
Так как площадь лесных пожаров зачастую составляет десятки тысяч гектаров, то их тушение водой требует колоссальных объемов воды и часто становится невозможным или малоэффективным вследствие отсутствия близких источников воды достаточной мощности, а также недостаточных транспортных возможностей пожарных подразделений по доставке или перекачке воды в зону пожаров.
Чтобы повысить эффективность заградительных и опорных минерализованных полос и огнезащитных барьеров необходимо очень оперативно контролировать состояние фронта пожара новейшими техническими средствами и быстро подавлять локальные прорывы пламени через них, используя пожарные роботы. Что и предлагается делать в новом способе тушения.
Предложен роботизированный комплекс для осуществления способа тушения лесных пожаров, содержащий множество дистанционно управляемых транспортных средств со средствами пожаротушения,
отличающихся тем что, роботизированный комплекс содержит одну или несколько роботизированных платформ оборудованных приспособлением для валки леса, одну или несколько роботизированных платформ, оборудованных траншеекопателем или грунтометом, одну или несколько роботизированных платформ, оборудованных установкой для тушения пожаров струей воды и/или пены, один или несколько коптеров, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR;
отличающихся также тем что, вышеописанный роботизированный комплекс содержит автомобили, оборудованные средствами дистанционного управления элементами комплекса, а также прицепы для перевозки роботизированных платформ и антенных мачт для каналов дистанционного управления;
отличающихся также тем что, все или часть роботизированных платформ комплекса может быть дополнительно оборудована бульдозерными отвалами, или экскаваторными приспособлениями и/или лебедками;
отличающихся также тем что, все или часть роботизированных платформ комплекса может быть выполнена в авиамобильном исполнении;
отличающихся также тем что, все или часть роботизированных платформ комплекса может быть выполнена в плавающем исполнении.
Основные отличия заявляемого роботизированного комплекса заключаются в следующем.
Предлагается использовать три типа функциональных роботов.
1. Первый тип роботизированной платформы оснащен приспособлением для валки леса.
2. Второй тип роботизированной платформы оснащен траншеекопателем или грунтометом для создания минерализованных или заградительных полос.
3. Третий тип роботизированной платформы оснащен лафетом для тушения пожара и устройством для поджигания напочвенного покрова с целью пуска встречного огня.
4. Все или часть роботизированных платформ комплекса, преимущественно тех, которые оборудованы траншеекопателем или грунтометом, могут содержать устройства для пуска отжига, например зажигательные аппараты фитильно-капельного типа, заправленные бензино-масляной смесью, или иные зажигательные аппараты.
5. В состав комплекса входит дрон на базе коптера, оснащенный системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR для оперативного контроля состояние фронта пожара.
Роботизированный комплекс содержит автомобили управления, оборудованные средствами дистанционного управления элементами комплекса, а также прицепы для перевозки роботизированных платформ.
Прицепы для перевозки роботизированных платформ являются ретрансляторами радио-видео команд управления роботами и содержат антенные мачты для каналов дистанционного управления. Применение антенных мачт в лесу позволяет повысить дальность управления элементами комплекса.
Автомобили управления объединены в единую систему управления с помощь сети Wi-Fi.
Указанные отличия являются новыми, в указанном сочетании не встречаются в известных патентах, а это сочетание не вытекает явно из уровня техники.
Техническим результатом от использования заявляемого роботизированного комплекса является повышение эффективности тушения лесных пожаров, снижение опасности и трудоемкости процесса тушения за счет его роботизации.
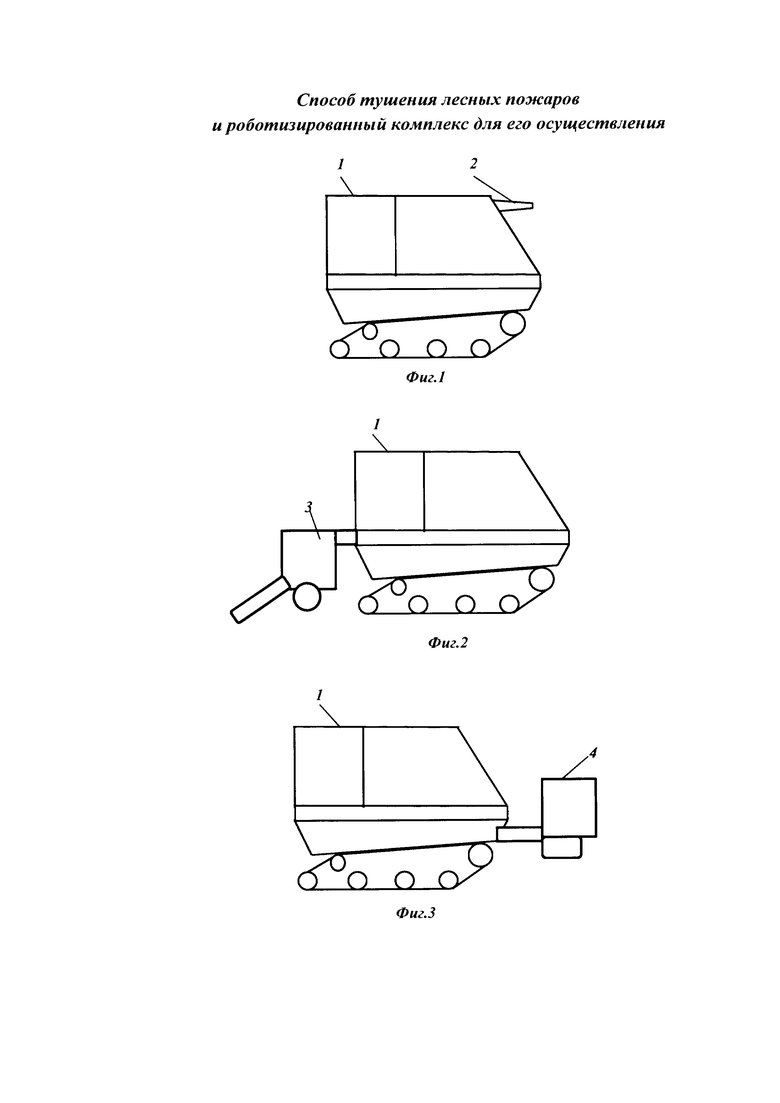
Описание предлагаемого изобретения поясняется фигурами 1-2, на которых показано устройство.
На фигурах 1-2 цифрами обозначены:
1 - роботизированная платформа;
2 - пожарный лафет для тушения пожаров водой или пеной;
3 - траншеекопатель или грунтомет или плуг;
4 - вал очное устройство с пилой;
5 - машина управления;
6 - прицеп;
7 - антенная мачта для радио и видеоканалов управления;
8 - роботизированная платформа с валочным устройством с пилой;
9 - просека;
10 - роботизированная платформа с траншеекопателем или грунтометом или плугом;
11 - минерализованная полоса;
12 - роботизированная платформа с пожарным лафетом для тушения пожаров водой или пеной;
13 - коптер, оснащенный камерами видеонаблюдения, а также с камерами FLIR или SWIR;
14 - место прорыва пожара через минерализованную полосу;
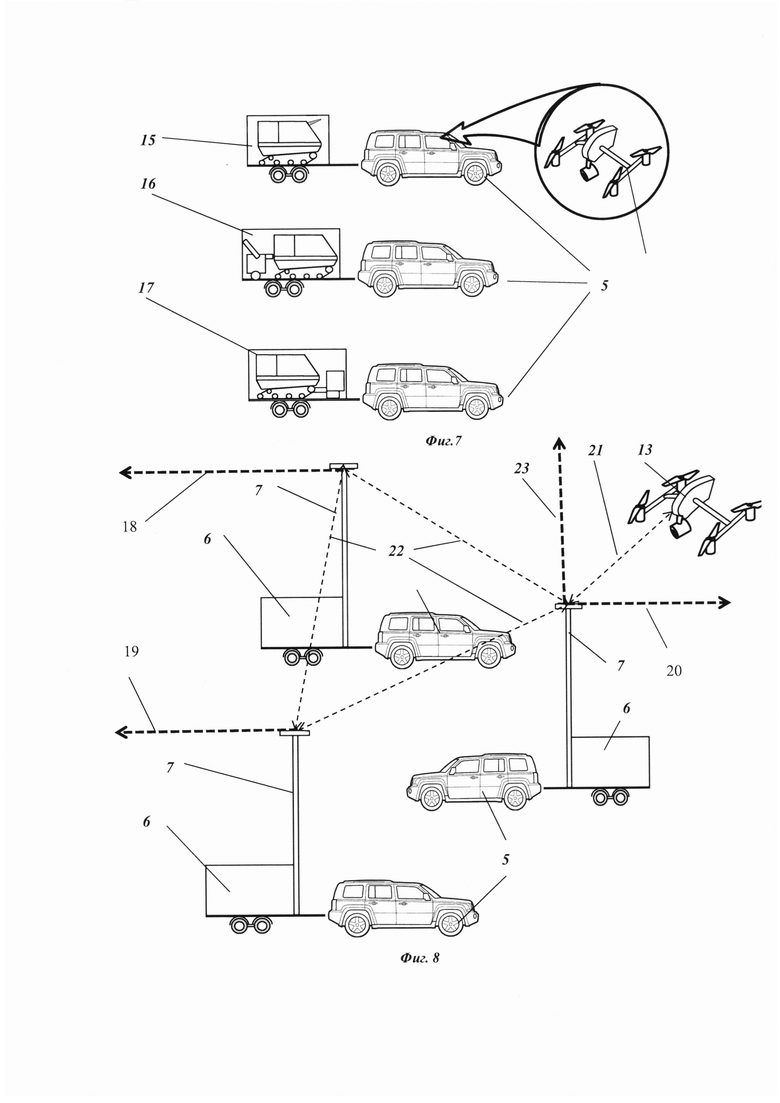
15 - прицеп с погруженной роботизированной платформой 12 с пожарным лафетом для тушения пожаров водой или пеной;
16 - прицеп с погруженной роботизированной платформой с траншеекопателем или грунтометом или плугом;
17 - прицеп с погруженной роботизированной платформой с валочным устройством с пилой;
18 - канал связи с роботизированной платформой 8;
19 - канал связи с роботизированной платформой 10;
20 - канал связи с роботизированной платформой 12;
21 - канал связи с коптером 13;
22 - каналы связи машин между собой (сеть Wi-Fi).
23 - канал связи с вышестоящим руководством (спутниковая связь).
Везде на рисунках штриховыми линиями показаны радио-видеоканалы управления.
На фиг. 1 показана роботизированная платформа с пожарным лафетом для тушения пожаров водой или пеной.
На фиг. 2 показана роботизированная платформа с траншеекопателем или грунтометом или плугом.
На фиг. 3 показана роботизированная платформа с валочным устройством с пилой.
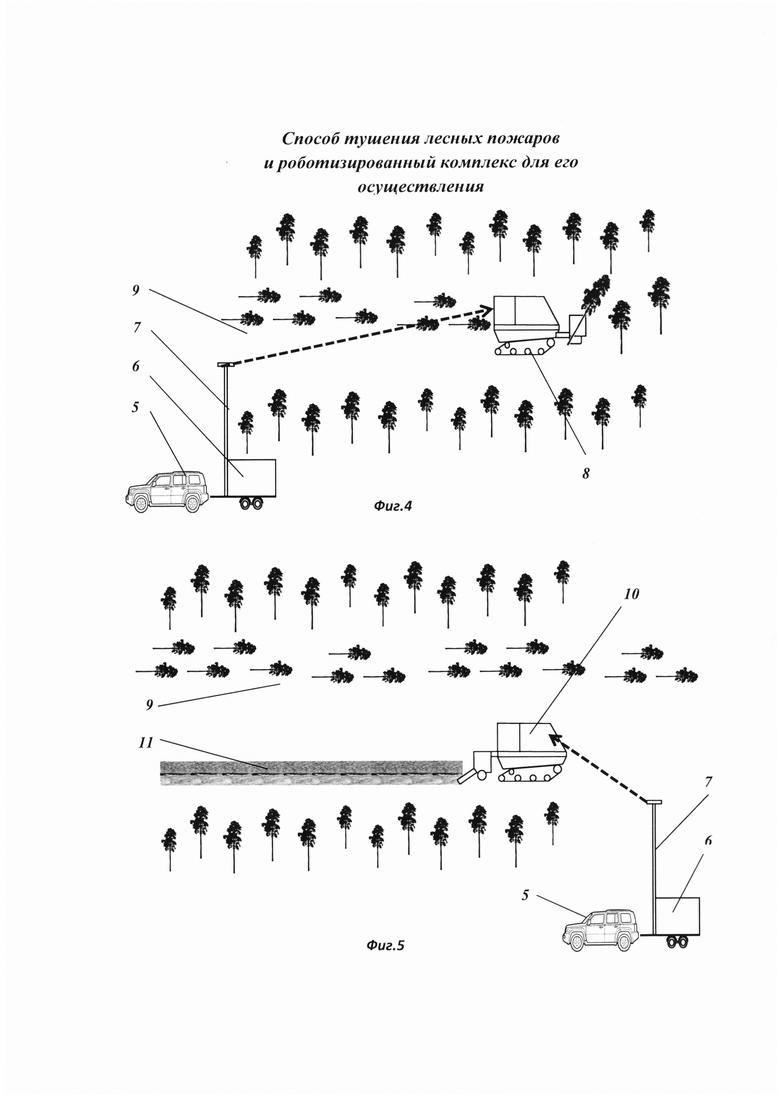
На фиг. 4 показан процесс валки леса роботизированной платформой с траншеекопателем или грунтометом или плугом, показанным на фиг. 2
На фиг. 5 показан процесс прокладки минерализованной полосы роботизированной платформой с траншеекопателем или грунтометом или плугом.
На фиг. 6 показан процесс обнаружения коптером, оснащенным камерами видеонаблюдения, а также с камерами FLIR или SWIR, прорыва фронтом пламени пожара минерализованной полосы и процесс локализации прорыва фронта пожара роботизированной платформой с пожарным лафетом для тушения пожаров водой или пеной.
На фиг. 7 показан роботизированный комплекс в походном положении.
На фиг. 8 показан командный пункт роботизированного комплекса в развернутом положении.
Работа роботизированного комплекса при осуществлении предложенного способа тушения лесных пожаров происходит следующим образом.
Перед тушением лесного пожара производится его обследование с использованием наземных, авиационных и (или) космических средств, а также одного или нескольких коптеров 13, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR и/или систем наблюдения роботизированных платформ 8, 10 и 12.
После обследования пожара начинают его локализацию путем прокладки заградительной и опорной минерализованной полосы 12. Предварительно в местах намеченной трассы прокладки заградительной и опорной минерализованной полосы 12 производят валку леса с помощью одной или нескольких роботизированных платформ 8, оборудованных приспособлениями для валки леса 4 (Фиг. 4), затем прокладывают минерализованную или заградительную полосу 12 с помощью одной или нескольких роботизированных платформ 10, оборудованных траншеекопателем или грунтометом 3 (Фиг. 5).
В процессе создания заградительной или опорной минерализованной полосы 12 постоянно производится обследование/мониторинг пожара с использованием одного или нескольких коптеров 13 (Фиг. 6), оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR и/или систем наблюдения роботизированных платформ 8, 10 и 12. Видеоизображения мониторинга передаются в одну из машин управления 5, из которой осуществляется управление коптером, и постоянно анализируются.
В случае обнаружения вероятности или факта пересечения фронтом пламени пожара созданной минерализованной и отожженой полосы 11 на отдельных участках 14, направляют на эти участки 14 одну или несколько роботизированных платформ 12, оборудованных установками для тушения пламени струей воды и/или пены 2, и с их помощью дистанционно тушат пламя на этих участках, предотвращая прорыв пожара, например, через минерализованную полосу 12. (Фиг. 6)
К месту пожара роботизированные комплексы 8, 10 и 12 перевозятся автомобилями управления 5, на прицепах 6. (Фиг 7). Каждый прицеп 6 оснащен выдвижной радиомачтой 7 для поднятия антенн управления на высоту 6-12 м. Применение выдвижных радиомачт 7 позволяет повысить дальность управления комплексом в условиях леса. В походном положении радиомачты 7 находятся в сложенном положении.
При перевозке в походном положении коптер 13, оснащенный камерами видеонаблюдения, а также с камерами FLIR или SWIR, находится в упакованном положении в автомобиле управления 5, в котором размещен пульт управления коптером 13 или в ином месте.
После прибытия к месту тушения пожара комплекс переводится в рабочее положение. Роботизированные платформы 8, 10 и 12 выгружаются на грунт по съемным аппарелям, а радиомачты 7 выдвигаются в рабочее положение. При этом машины управления 5 могут находиться на одном участке местности, как показано на Фиг. 8 или могут располагаться в местах, удобных для управления роботизированными платформами 8, 10 и 12 как показано на фигурах 4, 5 и 6.
Для связи и слаженного управления роботизированным комплексом все машины управления оснащены средствами связи между собой сетью Wi-Fi. Для централизованной связи одна из машин имеет средства спутниковой связи с вышестоящим руководством 23.
С целью повышения функциональности и эффективности роботизированного комплекса в его состав может входить несколько роботизированных платформ 8, 10 и 12, а также несколько коптеров, оснащенных камерами видеонаблюдения, а также с камерами FLIR или SWIR.
С целью повышения функциональности и эффективности элементов роботизированного комплекса они могут быть дополнительно оборудованы бульдозерными отвалами, и/или экскаваторными приспособлениями и/или лебедками.
С целью повышения функциональности и эффективности элементов роботизированного комплекса они могут быть плавающими и аэромобильными.
Борьба с лесными пожарами является одной из важнейших задач лесного хозяйства России. Более 90% лесных пожаров являются низовыми. Верховые и торфяные пожары также начинаются с низовых, в связи с этим разработка новых технологий тушения и локализации низовых пожаров различной интенсивности повышает эффективность системы охраны лесов и поэтому весьма актуальна.
Обладая рядом неоспоримых преимуществ перед известными способами и устройствами предлагаемый «Способ тушения лесных пожаров и роботизированный комплекс для его осуществления» найдет самое широкое применение в практике тушения лесных пожаров.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ С ПОМОЩЬЮ РУЛОННЫХ ОГНЕЗАЩИТНЫХ ЭКРАНОВ | 2018 |
|
RU2695139C1 |
| Мобильный агрегат | 2024 |
|
RU2831051C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ЛОКАЛИЗАЦИИ ЛЕСНЫХ ПОЖАРОВ | 2003 |
|
RU2245179C2 |
| СПОСОБ ДОСТАВКИ РОБОТЕХНИЧЕСКОГО КОМПЛЕКСА ПОВЫШЕННОЙ ПРОХОДИМОСТИ К МЕСТУ ПОЖАРА И ПРОВЕДЕНИЮ СПАСАТЕЛЬНЫХ РАБОТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2553016C1 |
| Способ локализации и тушения низовых лесных и степных пожаров и устройство для его реализации | 2021 |
|
RU2768353C1 |
| Способ локализации и тушения лесных пожаров | 1989 |
|
SU1789232A1 |
| УСТАНОВКА ДЛЯ ПОЖАРОТУШЕНИЯ | 2012 |
|
RU2498830C2 |
| СПОСОБ ОЧИСТКИ ВОДОХРАНИЛИЩ В УСЛОВИЯХ КРАЙНЕГО СЕВЕРА И ВЕЧНОМЕРЗЛЫХ ГРУНТОВ С ПРИМЕНЕНИЕМ УПРАВЛЯЕМОГО ОГНЯ | 2000 |
|
RU2185480C2 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| Пожарный мотоцикл грунтомет, дисковый кусторез, пластинчатый кусторез, гидропневматическая шина | 2020 |
|
RU2760386C2 |

Изобретение относится к противопожарной технике, применяемой при тушении лесных пожаров. Способ тушения лесных пожаров, включающий прокладку заградительных и опорных минерализованных полос, для чего производят валку леса с помощью роботизированных платформ, оборудованных приспособлениями для валки леса, затем прокладывают минерализованные полосы с помощью роботизированных платформ, оборудованных траншеекопателем или грунтометом, а также используя устройства для пуска отжига. В процессе локализации лесного пожара ведут наблюдение за ним с помощью коптеров, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR и в случае обнаружения факта пересечения фронтом пламени пожара созданной заградительной полосы на отдельных участках, направляют на эти участки роботизированные платформы, оборудованные установками для тушения пламени струей воды и/или пены, и с их помощью дистанционно тушат пламя на этих участках, предотвращая прорыв пожара. Роботизированный комплекс для осуществления способа тушения лесных пожаров содержит комплекс из автомобилей, оборудованных средствами дистанционного управления элементами комплекса, средствами связи между собой и вышестоящим руководством, а также прицепы для перевозки роботизированных платформ. 2 н. и 6 з.п. ф-лы, 8 ил.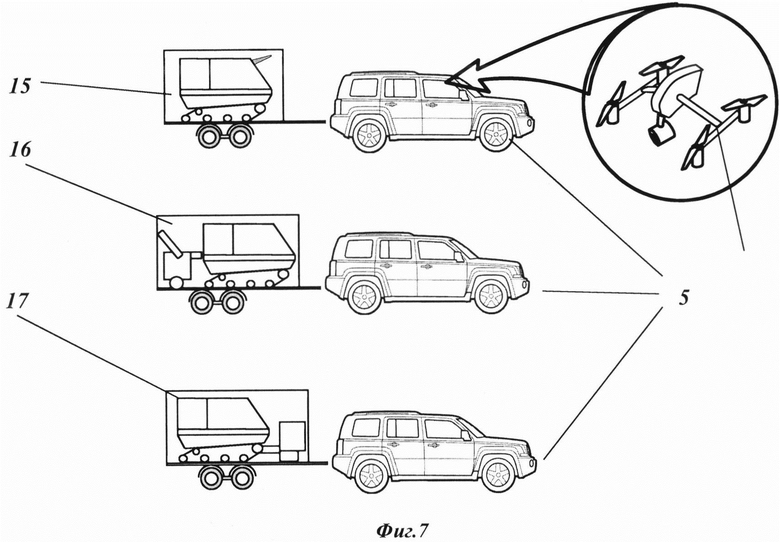
1. Способ тушения лесных пожаров, включающий его обследование с использованием наземных, авиационных и (или) космических средств, локализацию пожара путем прокладки заградительных и опорных минерализованных полос, в том числе и методом отжига напочвенного покрова, тушения водой и огнетушащими растворами, а также наблюдение за локализованным лесным пожаром и его дотушивание, отличающийся тем, что для прокладки заградительных и опорных минерализованных полос в местах их прокладки дистанционно производят валку леса с помощью одной или нескольких роботизированных платформ, оборудованных приспособлениями для валки леса, затем дистанционно прокладывают минерализованные и заградительные полосы с помощью одной или нескольких роботизированных платформ, оборудованных траншеекопателем или грунтометом, а также используя устройства для пуска отжига (поджигания напочвенного покрова с целью пуска встречного огня) и в случае обнаружения вероятности или факта пересечения фронтом пламени пожара созданной заградительной полосы на отдельных участках, направляют на эти участки одну или несколько роботизированных платформ, оборудованных установками для тушения пламени струей воды и/или пены, и с их помощью дистанционно тушат пламя на этих участках, предотвращая прорыв пожара.
2. Способ по п. 1, отличающийся тем, что наблюдение за лесным пожаром ведут дистанционно с помощью одного или нескольких коптеров, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR и/или систем наблюдения роботизированных платформ
3. Способ по п. 1, отличающийся тем, что поджигание напочвенного покрова с целью пуска встречного огня производят при необходимости дистанционно с помощью роботизированных платформ, оборудованных устройством для поджигания напочвенного покрова, в местах, в которых предварительно сформированы минерализованные полосы или иные препятствия для распространения пожара, например, установлены огнезащитные экраны.
4. Роботизированный комплекс для осуществления способа тушения лесных пожаров по п. 1, содержащий множество дистанционно управляемых транспортных средств со средствами пожаротушения, отличающихся тем, что роботизированный комплекс содержит одну или несколько роботизированных платформ, оборудованных приспособлением для валки леса, одну или несколько роботизированных платформ, оборудованных траншеекопателем или грунтометом, одну или несколько роботизированных платформ, оборудованных установкой для тушения пожаров струей воды и/или пены, один или несколько коптеров, оснащенных системами видеонаблюдения и/или тепловизионными камерами SWIR или FLIR, при этом все или часть роботизированных платформ комплекса, преимущественно тех, которые оборудованы траншеекопателем или грунтометом, могут содержать устройства для пуска отжига, например зажигательные аппараты фитильно-капельного типа, заправленные бензино-масляной смесью, или иные зажигательные аппараты.
5. Роботизированный комплекс по п. 4, отличающийся тем, что содержит автомобили, оборудованные средствами дистанционного управления элементами комплекса, средствами связи между собой и вышестоящим руководством, а также прицепы для перевозки роботизированных платформ.
6. Роботизированный комплекс по п. 4, отличающийся тем, что все или часть роботизированных платформ комплекса может быть дополнительно оборудована бульдозерными отвалами, и/или экскаваторными приспособлениями, и/или лебедками.
7. Роботизированный комплекс по п. 4, отличающийся также тем, что все или часть роботизированных платформ комплекса может быть плавающими и/или аэромобильными.
8. Роботизированный комплекс по п. 4, отличающийся тем, что прицепы для перевозки роботизированных платформ содержат антенные мачты для каналов дистанционного управления.
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2010 |
|
RU2423160C1 |
| Устройство для сборки восковых моделей | 1951 |
|
SU95263A1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С ПРИМЕНЕНИЕМ ПОЖАРНЫХ РОБОТОВ ВЫСОКОГО ДАВЛЕНИЯ | 2008 |
|
RU2391125C1 |
| Устройство для защиты электрической установки трамвайного вагона | 1932 |
|
SU29857A1 |
| US 6798343 B2, 28.09.2004. | |||

