Изобретение относится к области пожаротушения, в частности к способам локализации лесных пожаров.
Известен способ тушения очагов пожара (заявка РФ на изобретение №95121487/12), заключающийся в визуальном наведении летательного аппарата на очаг пожара и сливе огнегасительной жидкости.
Известный способ недостаточно эффективен в условиях сильного ветра, повышенной задымленности.
Известен способ локализации лесного пожара (заявка РФ на изобретение №96120344/12) путем отжига лесных горючих материалов с фиксированной внешней относительно фронта пожара границей отжига при помощи газоструйного реактивного потока газотурбинного двигателя.
Недостатком известного способа является то, что при перемещении газотурбинного двигателя вдоль границы полосы отжига при больших площадях возгораний не предполагается одновременная прокопка противопожарной полосы, которая более эффективно бы фиксировала границу отжига.
Цель изобретения - повышение эффективности и безопасности процесса пожаротушения.
Указанная цель достигается тем, что автоматизированный способ локализации лесных пожаров путем отжига лесных горючих материалов от заградительной полосы во встречном направлении фронту пожара предполагает использование дистанционно управляемого мобильного роботизированного комплекса, содержащего роторно-винтовые движители и огнемет, при этом с целью обеспечения передвижения и одновременной прокладки заградительной полосы роторно-винтовые движителивыполнены трехсекционными с возможностью наклона и вращения с разными скоростями одних относительно других.
Отличительными признаками в заявляемом изобретении в сравнении с прототипом является то, что способ предполагает использование дистанционно управляемого мобильного роботизированного комплекса, содержащего роторно-винтовые движители и огнемет, при этом с целью обеспечения передвижения и одновременной прокладки заградительной полосы роторно-винтовые движители выполнены трехсекционными с возможностью наклона и вращения с разными скоростями одних относительно других.
Предлагаемое изобретение поясняется чертежами, где:
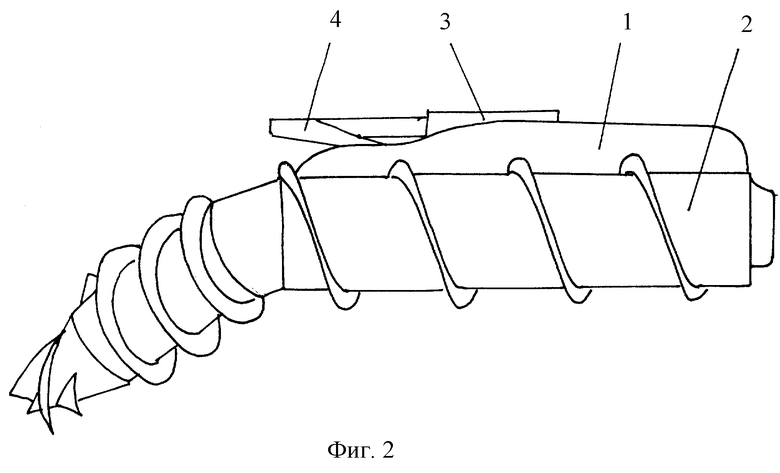
на фиг. 1 изображен мобильный роботизированный комплекс, вид сверху;
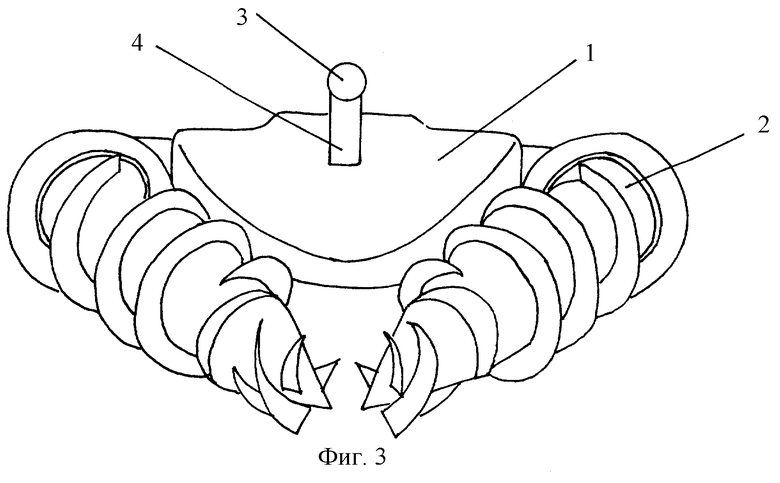
на фиг. 2 - вид сбоку;
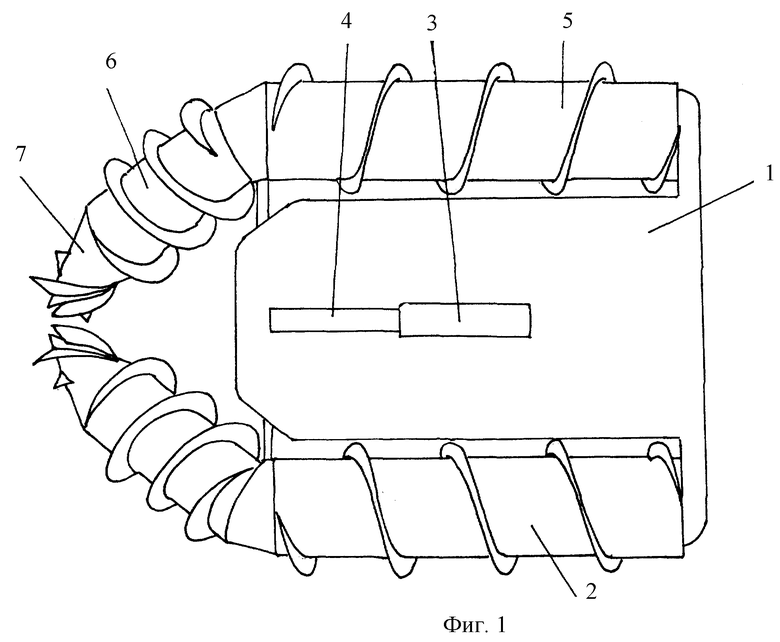
на фиг. 3 - вид спереди.
Используемый при реализации предлагаемого способа локализации лесных пожаров мобильный роботизированный комплекс (МРК) представляет собой платформу 1 с расположенными по бортам трехсекционными роторно-винтовыми движителями (РВД) 2 и огнеметом 3, установленным на манипуляторе 4. Основная секция 5 РВД, расположенная параллельно платформе 1, обеспечивает главное движение МРК. Вторая секция 6 РВД, связанная с основной с возможностью отклонения вверх и вниз и вращающаяся с более высокой скоростью, обеспечивает отвал грунта (прокапывание) при формировании противопожарного рва. Третья секция 7 РВД - активная головка в виде конуса с режущими кромками, вращающаяся с высокой скоростью, обеспечивает разрыхление грунта, разрушение твердых пород, корней и т.п.
Манипулятор 4 с необходимым количеством степеней подвижности обеспечивает в транспортном положении складывание огнемета 3 внутрь платформы 1, а в рабочем положении - целенаправленное воздействие огнемета. РВД, приводы манипулятора, исполнительные механизмы приводятся в движение от энергетической установки, размещенной внутри платформы 1. Движение вбок, поворот, разворот обеспечиваются изменением скорости и направления вращения РВД. Герметичность РВД обеспечивает амфибийность МРК, что позволяет передвигаться и безопасно выполнять работу на любых грунтах и преодолевать водные преграды.
Система датчиков МРК обеспечивает визуализацию рабочей среды, распознавание препятствий, сбор информации для передачи в центр управления о характере и направлении распространения пожара. В состав МРК входит система позиционирования GPS (спутниковая навигационная система) и система дистанционного управления.
Оперативное управление МРК ведется оператором из центра управления.
Локализация лесного пожара по предложенному способу осуществляется следующим образом.
При поступлении в центр управления сигнала о возникновении очага пожара и информации о его координатах с базы в район пожара авиационными средствами доставляется МРК и десантируется с помощью тросовой или парашютной системы. Далее МРК своим ходом перемещается в заданную координатами точку. При этом его передние секции РВД подняты вверх с тем, чтобы обеспечивать преодоление препятствий, например поваленные деревья. Прибыв в заданную точку, МРК уже с опущенными передними секциями РВД начинает по заданному маршруту вокруг очага пожара по ходу своего движения прокапывать противопожарную полосу в виде рва и одновременно вести поджиг лесных горючих материалов во встречном направлении фронту пожара. В операции по локализации лесного пожара может быть задействовано несколько МРК, что позволит существенно повысить эффективность и сократить время операции. После проведения операции по ликвидации пожара с МРК в центр управления поступают радиосигналы о своем месте нахождения. После чего осуществляется эвакуация МРК на базу.
Предлагаемый автоматизированный способ локализации лесных пожаров позволяет сократить время реакции пожарных служб с момента получения информации о возникновении пожара, повысить эффективность процесса локализации пожара и повысить безопасность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2677413C1 |
| МАШИНА ДЛЯ ПРОКОПКИ ПРОТИВОПОЖАРНОЙ ПОЛОСЫ | 2010 |
|
RU2437695C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ С ПОМОЩЬЮ РУЛОННЫХ ОГНЕЗАЩИТНЫХ ЭКРАНОВ | 2018 |
|
RU2695139C1 |
| ПРОТИВОПОЖАРНЫЙ РОБОТ | 2003 |
|
RU2254892C1 |
| Способ тушения пожаров многофункциональным робототехническим комплексом при авариях в тоннелях | 2024 |
|
RU2834501C1 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИЙ МОДУЛЬ | 2011 |
|
RU2488662C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ЛЕСНОГО ПОЖАРА | 1996 |
|
RU2113260C1 |
| Способ локализации лесных пожаров | 1981 |
|
SU1147413A1 |
| Способ локализации лесных пожаров | 1988 |
|
SU1556687A1 |
| СПОСОБ ЛОКАЛИЗАЦИИ НИЗОВОГО ЛЕСНОГО ПОЖАРА | 2007 |
|
RU2345806C2 |
Изобретение относится к области пожаротушения, в частности к способам локализации лесных пожаров. Предлагаемый автоматизированный способ локализации лесных пожаров позволяет сократить время реакции пожарных служб с момента получения информации о возникновении пожара, повысить эффективность процесса локализации пожара и повысить безопасность работы. Это достигается тем, что предлагаемый способ локализации лесных пожаров путем отжига лесных горючих материалов от заградительной полосы во встречном направлении фронту пожара предполагает использование дистанционного управляемого мобильного роботизированного комплекса, содержащего огнемет и роторно-винтовые движители, обеспечивающие по ходу передвижения одновременную прокопку заградительной полосы. 3 ил.
Автоматизированный способ локализации лесных пожаров путем отжига лесных горючих материалов от заградительной полосы во встречном направлении фронту пожара, отличающийся тем, что способ предполагает использование дистанционно управляемого мобильного роботизированного комплекса, содержащего роторно-винтовые движители и огнемет, при этом с целью обеспечения передвижения и одновременной прокладки заградительной полосы роторно-винтовые движители выполнены трехсекционными с возможностью наклона и вращения с разными скоростями относительно друг друга.
| СПОСОБ ЛОКАЛИЗАЦИИ ЛЕСНОГО ПОЖАРА | 1996 |
|
RU2113260C1 |
| Способ локализации лесных пожаров | 1981 |
|
SU1147413A1 |
| ПРОТИВОПОЖАРНАЯ ГРУНТОМЕТНО-ПЕСКОСТРУЙНАЯ МАШИНА | 2000 |
|
RU2183486C2 |
| JP 2000126324 A, 09.05.2000 | |||
| Способ получения люминофора зеленого свечения | 2018 |
|
RU2691366C1 |

