Изобретение относится к радиотехнике и может быть использовано при разработке систем радиозондирования атмосферы (СР) на основе использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) GPS/ГЛОНАСС для определения текущих координат аэрологического радиозонда (РЗ), направления и скорости ветра, а также передачи координатной и телеметрической информации на наземную базовую станцию (БС).
Общей проблемой производства и эксплуатации СР атмосферы является создание высокоточных систем определения координат АРЗ, недорогих конструкций аэрологических радиозондов, обеспечивающих измерение метеорологических параметров атмосферы с необходимой точностью, надежную передачу информации с борта АРЗ на наземную станцию в оперативном радиусе действия СР.
Известен GPS-зонд не обрабатывающий кодовый сигнал, а ретранслирующий его на наземный приемник (патент США №4754283).
Это прибор для измерения скорости ветра, приемник которого обрабатывает сигналы спутниковой навигационной системы GPS без использования широкополосных кодов. Этот прибор интегрирует двухфазный код и выделяет только несущие частоты сигналов всех «видимых» приемной антенной спутников. Используются два таких приемника. Один приемник располагается на земле, в месте, с известными координатами (широта и долгота). Другой приемник размещается на баллонном аэрологическом радиозонде и запускается в атмосферу. Передатчик телеметрии на борту зонда, связанный с GPS-системой, передает сигнал, содержащий информацию о несущих частотах спутников GPS, на приемник сигналов телеметрии, расположенный на Земле. Сигналы с выхода приемника телеметрии и локального, не обрабатывающего кодовый сигнал GPS-приемника поступают на группу следящих фильтров. Отфильтрованные сигналы оцениваются для измерения разницы между несущими частотами локального GPS-приемника и частотами GPS-приемника зонда, вызванной скоростью перемещения зонда относительно базового приемника, то есть здесь наблюдается доплеровский эффект. Скорость ветра вычисляется исходя из измеренных доплеровских смещений GPS-приемника зонда и известных координат спутников GPS. Скорость зонда вычисляется в виде трехкоординатного пространственного вектора. Этот вектор может быть интегрирован для получения координат X, Y и высоты Z от точки запуска зонда.
Недостатки известного решения: сложный и менее точный способ вычисления координат радиозонда, а также отсутствие приема и обработки метеовеличин.
Известны метод и аппаратура для слежения за местоположением и скоростью приборов, находящихся в воздухе (патент США №5347285).
Определяются метод и система слежения, по крайней мере, за одним движущимся объектом, таким, как находящийся в воздухе метеорологический прибор, с расположенной на Земле станции слежения путем перехвата широкополосных сигналов, передаваемых созвездием спутников, в которых кодовая последовательность неизвестна. Метод и система включают в себя схему приемника на движущемся объекте, которая сжимает широкополосные сигналы в узкополосный сигнал, удаляет все частотные сдвиги с помощью эталонного генератора со смещенной частотой, формирует узкополосный аналоговый модулирующий сигнал и передает его на базовую станцию, в которой выполняется перевод сигнала в спектральную область и полученные спектральные составляющие сравниваются с синтезированными спектральными величинами, чтобы идентифицировать каждый спутник, оценивается смещение частоты эталонного генератора, а также определяются координаты и скорость движущегося объекта.
Недостатки известного решения: сложный и менее точный способ вычисления координат радиозонда.
Известны отдаленный GPS-датчик и обрабатывающая система для удаленного GPS-зондирования и централизованная обработка на наземной станции для удаленного мобильного определения местоположения и скорости (патент США №5420592).
Пример осуществления данного изобретения - система радиозондирования, включающая в себя цифровой буфер снимка сигналов GPS и последовательный коммуникационный контроллер для передачи кадров сообщений, формируемых комбинацией цифровых данных из буфера снимка сигналов GPS и оцифрованных метеорологических данных, полученных устройством измерения влажности, температуры и давления. Кадры сообщения передаются со сравнительно низкой скоростью по метеорологическому радиоканалу на наземную станцию. Вся традиционная цифровая обработка GPS-сигналов главным образом выполняется на наземной станции, включая восстановление несущей частоты, захват псевдослучайно-шумового кода, выделение псевдодальностей, выделение эфемеридной информации, сбор альманаха, выбор спутников, вычисление навигационного решения и дифференциальные поправки. Кроме того, наземная обработка включает в себя фильтрацию Калмана вычисления скорости ветра.
Недостатки известного решения:
- большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика радиозонда);
- прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров.
Известна система GPS-слежения (патент США №5379224).
Недорогая система слежения, использующая спутники глобальной системы позиционирования (GPS), пригодна для применения в прикладных задачах, в которых задействованы радиозонды, радиогидроакустические буйки и другие подвижные объекты. Система слежения включает в себя датчик, установленный на каждом объекте, который оцифровывает сигналы GPS-спутников и записывает их в буфер данных. Затем эти цифровые выборки передаются, с меньшей скоростью, чем эти сигналы GPS-спутников были оцифрованы по телеметрическому каналу связи, чередуясь с другими телеметрическими данными объекта. Эти данные GPS обрабатываются вычислительной рабочей станцией, которая вычисляет координаты и скорость датчика на момент выборки (оцифровки) сигнала. Буфер данных датчика периодически обновляется, а на рабочей станции периодически пересчитываются координаты и скорость датчика. Кроме этого, рабочая станция вычисляет дифференциальные поправки, чтобы помочь обнаружить сигналы и повысить точности определения координат.
Недостатки известного решения:
- большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика);
- прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров. Это техническое решение выбрано в качестве прототипа.
Недостатками всех известных технических решений и прототипа являются недостаточная точность определения координат движения радиозонда в свободной атмосфере и невысокая помехозащищенность от помех, создаваемых другими радиосистемами.
Технической задачей изобретения является повышение точности определения координат аэрологического радиозонда и обеспечение надежной передачи метеоинформации с борта АРЗ на наземную станцию в оперативном радиусе действия СР.
Для решения поставленной задачи предлагается метеорологическая система, которая содержит передатчики навигационных сигналов системы GPS, передатчики навигационных сигналов системы ГЛОНАСС, аэрологический радиозонд (АРЗ), снабженный приемником навигационных сигналов систем GPS и ГЛОНАСС, первую, вторую и третью антенные системы, наземную базовую станцию с блоком отображения координатно-телеметрической информации, первый - шестой радиоканалы со следующими соединениями: навигационные сигналы систем GPS и ГЛОНАСС по первому и третьему радиоканалам связаны с первым и вторым входами АРЗ, навигационные сигналы системы ГЛОНАСС связаны четвертым радиоканалом с вторым входом первой антенной системы, навигационные сигналы системы GPS по второму радиоканалу связаны с первым входом первой антенной системы; аэрологический радиозонд (АРЗ) пятым радиоканалом связан с входом второй антенной системы, а шестым радиоканалом - с входом третьей антенной системы; выходы первой и второй антенных систем связаны первой и второй информационными шинами с первым и вторым входами наземной базовой станции соответственно, которая первым и вторым выходами связана с входами привода управления третьей антенной системы по координатам угла места (ε) и азимута (β), выход которой третьей информационной шиной связан с третьим входом базовой станции, а последняя третьим выходом связана с блоком хранения и передачи координатно-телеметрической информации потребителю, выход которого подключен к потребителю аэрологической информации. Метеорологическая система может работать по сигналам ГЛОНАСС или GPS либо совместно по сигналам ГЛОНАСС и GPS. Первая антенная система метеорологической системы обеспечивает дифференциальный режим работы, вторая антенная система имеет, широкую диаграмму направленности и обеспечивает прием сигналов АРЗ в ближней зоне, третья антенная система имеет круговую диаграмму направленности в азимутальной плоскости «β» и узкую диаграмму направленности в угломестной плоскости «s», обеспечивает прием сигналов АРЗ в дальней зоне.
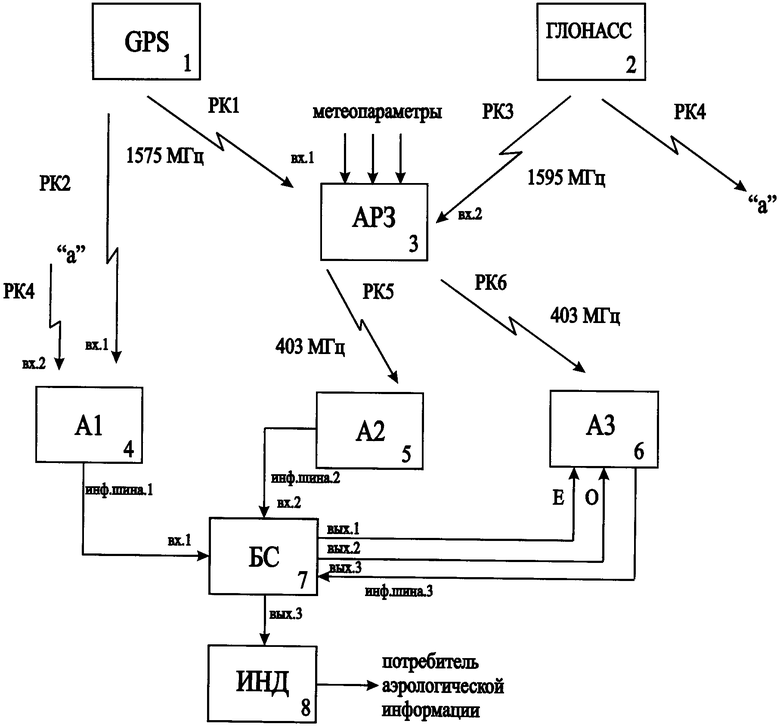
На чертеже изображена структурная схема системы радиозондирования атмосферы, построенная на основе использования сигналов СНРС GPS/ГЛОНАСС.
В состав СР входит: 1 - созвездие спутников СНРС GPS/Навстар; 2 - созвездие спутников СНРС ГЛОНАСС; 3 - аэрологический радиозонд, снабженный приемником сигналов СНРС GPS/Навстар и ГЛОНАСС; 4 - антенна приема сигналов СНРС в дифференциальном режиме (А1); 5 - антенна приема сигнала радиозонда с широкой диаграммой направленности (А2) и коэффициентом усиления 2-3 дБ; 6 - антенна приема сигнала радиозонда с круговой диаграммой направленности в азимутальной плоскости «β» и узкой диаграммой направленности в угломестной плоскости «ε» (A3) и коэффициентом усиления 10-12 дБ; 7 - наземная базовая станция БС; 8 - блок хранения, индикации и передачи аэрологический информации (ИНД).
Навигационные сигналы систем GPS1 и ГЛОНАСС2 по первому и третьему радиоканалам связаны с первым и вторым входами АРЗ3, навигационные сигналы системы ГЛОНАСС2 связаны четвертым радиоканалом с вторым входом первой антенной системы, навигационные сигналы системы GPS1 по второму радиоканалу связаны с первым входом первой антенной системы; аэрологический радиозонд (АРЗ)3 пятым радиоканалом связан с входом второй антенной системы, а шестым радиоканалом - с входом третьей антенной системы; выходы первой и второй антенных систем связаны первой и второй информационными шинами с первым и вторым входами наземной базовой станции 7 соответственно, которая первым и вторым выходами связана с входами привода управления третьей антенной системы по координатам угла места (ε) и азимута (β), выход которой третьей информационной шиной связан с третьим входом базовой станции, а последняя третьим выходом связана с блоком хранения индикации и передачи координатно-телеметрической информации 8 (ИНД) потребителю, выход которого подключен к потребителю аэрологической информации. Метеорологическая система может работать по сигналам ГЛОНАСС2 или GPS1 либо совместно по сигналам ГЛОНАСС2 и GPS1. Первая антенная система метеорологической системы обеспечивает дифференциальный режим работы, вторая антенная система имеет широкую диаграмму направленности и обеспечивает прием сигналов АРЗ3 в ближней зоне, третья антенная система имеет узкую диаграмму направленности, работает в следящем режиме и обеспечивает прием сигналов АРЗ3 в дальней зоне.
Метеорологическая система радиозондирования атмосферы состоит из базовой станции (БС) (7) и аэрологического радиозонда (АРЗ) (3). Косвенно в системе задействованы спутниковые радионавигационные системы (СРНС) GPS (1), ГЛОНАСС (2) и потребитель аэрологический информации. Аэрологический радиозонд (3) снабжен приемным устройством, осуществляющим одновременный прием навигационных сигналов спутниковых радионавигационных систем GPS и ГЛОНАСС, поступающих по радиоканалам РК1 и РК3. Из полученной навигационной информации и измеренных значений метеорологических параметров АРЗ (3) формирует информационный координатно-телеметрический сигнал и передает его на базовую станцию БС (7) по радиоканалу РК5 или РК6. В обычном режиме работы координатно-телеметрический сигнал АРЗ (3) поступает по радиоканалу РК5 на антенну А2 (5) с широкой диаграммой направленности (ДН) и по информационной шине 2 на базовую станцию 7, которая осуществляет демодуляцию сигнала АРЗ (3), выделяя из него координатно-телеметрическую информацию, осуществляет дальнейшую обработку данных, отображение и сохранение результатов радиозондирования атмосферы. Результаты радиозондирования атмосферы в принятом формате выдаются на блок хранения и передачи потребителю аэрологической информация в ИНД (8). Далее координатно-телеметрическая информация по каналам связи передается потребителю аэрологической информация.
В дифференциальном режиме работы БС (7) принимает навигационные сигналы СРНС GPS (1) и ГЛОНАСС (2), поступающие по радиоканалам РК2 и РК4 на приемную антенну А1 (4). Принятые сигналы передаются по «информационной шине 1» на «Вход 1» и обрабатываются в БС (7). В дифференциальном режиме определения координат АРЗ полученная таким образом навигационная информация используется для формирования корректирующих поправок при заранее известных геодезических координатах БС (7) к навигационным измерениям, выполненным АРЗ. Дифференциальный режим позволяет повысить точность измерения координат АРЗ.
Для борьбы с помехами методом пространственной селекции, увеличения рабочей дальности телеметрического радиоканала, повышения надежности получения координатно-телеметрической информации в БС (7), а также увеличения пропускной способности телеметрического радиоканала сигнал АРЗ, поступающий по радиоканалу РК6, может приниматься БС (7) через антенну A3 (6), которая имеет круговую диаграмму направленности в азимутальной плоскости «β» и узкую диаграмму направленности в угломестной плоскости «ε». При снижении отношения сигнал/шум ниже допустимого значения блок БС (7) автоматически осуществляет подключение антенны A3 и обеспечивает прием сигнала радиозонда по «информационной шине 3».
Осуществление предложений по материалам заявки в настоящее время реализуется на основе известных технических решений.
Принцип действия и технические характеристики СНРС GPS и ГЛОНАСС рассмотрены в [1, 2]. Описание функционирования и технические особенности построения аэрологических радиозондов дано в работах [3, 4]. Вопросы разработки и технологии изготовление всех типов антенн, антенных коммутаторов, приемных устройств, комплексов обработки информации и управления, входящих в предлагаемую систему радиозондирования, освещены в источниках [5, 6]. Технические характеристики серийных приемных модулей сигналов СНРС GPS/ГЛОНАСС, пригодных для установки в аэрологические радиозонды, приведены в [7,8].
Таким образом, технические усовершенствования, предложенные в предлагаемом изобретении на полезную модель, могут быть реализованы в промышленном производстве.
Предложенная система радиозондирования обеспечивает повышение точности и надежности определения текущих координат радиозонда за счет одновременного использования навигационных сигналов СНРС GPS и ГЛОНАСС. За счет введения антенны с круговой диаграммой направленности в азимутальной плоскости и узкой диаграммой направленности в угломестной плоскости, обладающей повышенным на 8-9 дБ коэффициентом усиления, соответственно повышаются помехоустойчивость и дальность действия системы радиозондирования.
Литература
1. Глобальная навигационная спутниковая система ГЛОНАСС. / Под. ред. В.Н.Харисова, А.И.Петрова, В.А.Болдина. 2-е изд., исправ. М.: ИПРЖР, 1999. - 560 с.
2. Яценков B.C. Основы спутниковой навигации. Системы GPS NAVSTAR и ГЛОНАСС. М.: Горячая Линия - Телеком, 2005, 272 с.
3. Зайцева Н.А. Аэрология. - Гидрометеоиздат, 1990, 325 с.
4. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и использования радиозондовых измерительных средств. В.Э.Иванов, М.Б.Фридзон, С.П.Ессяк. / Под ред. В.Э.Иванова. Екатеринбург. УрО РАН. 2004. 596 с. ISBN 5-7691-1513-0.
5. Ерохин Г.А., Чернышев О.В., Козырев Н.Д., Кочержевский В.Г. Антенно-фидерные устройства и распространение радиоволн: Учеб. для вузов. / Под ред. Г.А.Ерохина. М.: Радио и связь, 1996, 352 с.
6. Гассанов Л.Г., Липатов А.А., Марков В.В., Могильченко Н.А. Твердотельные устройства СВЧ в технике связи. М.: Радио и связь. 1988, 288 с.
7. Приемник навигационный СН-4706. Руководство по эксплуатации. ТДЦК.434855.001 РЭ. КБ Навис. 2010 г., 74 с.
8. Приемник навигационный МНП-М7. Руководство по эксплуатации. ЦВИЯ.468157.113 РЭ. Ижевский радиозавод, 2010 г., 48 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2015 |
|
RU2613153C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 2022 |
|
RU2820052C2 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ПЕРЕДАТЧИКОМ НА ПАВ-РЕЗОНАТОРЕ | 2022 |
|
RU2785585C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
Изобретение относится к области радиотехники, а именно к радиозондированию, и может быть использовано при разработке систем радиозондирования атмосферы (СР) на основе использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) GPS/ГЛОНАСС. Технический результат заключается в повышении точности определения координат аэрологического радиозонда (АРЗ) и обеспечении надежной передачи метеоинформации с борта АРЗ на наземную станцию в оперативном радиусе действия СР. Для этого предлагается метеорологическая система, содержащая передатчики навигационных сигналов системы GPS, передатчики навигационных сигналов системы ГЛОНАСС, АРЗ с приемниками GPS и ГЛОНАСС, три антенные системы, наземную базовую станцию с блоком отображения координатно-телеметрической информации, а также шесть радиоканалов, при этом базовая станция связана с приводом управления третьей антенной системы по координатам угла места (ε) и азимута (β). Первая антенная система метеорологической системы обеспечивает дифференциальный режим работы, вторая антенная система имеет широкую диаграмму направленности и обеспечивает прием сигналов АРЗ в ближней зоне, третья антенная система имеет узкую диаграмму направленности, работает в следящем режиме и обеспечивает прием сигналов АРЗ в дальней зоне. 2 з.п. ф-лы, 1 ил.
1. Метеорологическая система, содержащая наземную базовую станцию с блоком отображения текущей информации, антеннами, аэрологический радиозонд с приемником навигационных сигналов системы GPS, отличающаяся тем, что в нее введены приемник навигационных сигналов системы ГЛОНАСС, третья антенна со следующими соединениями: навигационные сигналы систем GPS и ГЛОНАСС по первому и третьему радиоканалам связаны с первым и вторым входами аэрологического радиозонда, навигационные сигналы системы ГЛОНАСС связаны четвертым радиоканалом с вторым входом первой антенной системы, навигационные сигналы системы GPS по второму радиоканалу связаны с первым входом первой антенной системы; аэрологический радиозонд пятым радиоканалом связан с входом второй антенной системы, а шестым радиоканалом - с входом третьей антенной системы; выходы первой и второй антенных систем связаны первой и второй информационными шинами с первым и вторым входами наземной базовой станции соответственно, которая первым и вторым выходами связана с входами привода управления третьей антенной системы по координатам угла места (ε) и азимута (β), выход которой третьей информационной шиной связан с третьим входом базовой станции, а последняя третьим выходом связана с блоком отображения координатно-телеметрической информации.
2. Метеорологическая система по п.1, отличающаяся тем, что она может работать по сигналам ГЛОНАСС или GPS либо совместно по сигналам ГЛОНАСС и GPS.
3. Метеорологическая система по п.1 и 2, отличающаяся тем, что первая антенная система обеспечивает дифференциальный режим работы, вторая антенная система имеет широкую диаграмму направленности и обеспечивает прием сигналов аэрологического радиозонда в ближней зоне, третья антенная система имеет узкую диаграмму направленности, работает в следящем режиме и обеспечивает прием сигналов аэрологического радиозонда в дальней зоне.
| US 5379224 А, 03.01.1995 | |||
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| US 5420592 A, 30.05.1995 | |||
| US 5347285 A, 13.09.1994 | |||
| US 2008140318 A1, 12.06.2008. | |||

