[0001] Настоящее изобретение в общем относится к системе обнаружения слепой зоны транспортного средства, которая дополнительно выполнена с возможностью регулировки условий, когда прицеп прикреплен к задней части транспортного средства. Конкретнее, система обнаружения слепой зоны транспортного средства включает в себя вычислительную систему, выполненную с возможностью определения, когда прицеп прикреплен к транспортному средству, и дополнительно выполненную с возможностью регулировки параметров системы обнаружения слепой зоны транспортного средства для продолжения функции обнаружения слепой зоны с учетом прикрепленного прицепа. Эти и другие признаки будут описаны более подробно во всем этом раскрытии.
УРОВЕНЬ ТЕХНИКИ
[0002] Транспортное средство может включать в себя систему обнаружения слепой зоны, состоящую из двух или более датчиков обнаружения слепой зоны, для обнаружения того, имеются ли объекты в пределах области слепой зоны относительно транспортного средства (например, области слепой зоны левой стороны и/или правой стороны транспортного средства). Когда один или более датчиков обнаружения слепой зоны ясно обнаруживают объект в пределах области слепой зоны, может генерироваться сигнал, предназначенный для предупреждения водителя об объекте в пределах области слепой зоны. Для того, чтобы эффективно эксплуатировать такую систему обнаружения слепой зоны, транспортное средство должно иметь точное представление о своих собственных физических размерах, а также размерах его окружающих областей слепой зоны для того, чтобы эффективно идентифицировать объекты, которые могут попадать в области слепой зоны транспортного средства.
[0003] Однако при модификации транспортных средств с возможностью включения доступных креплений, слепая зона общей системы транспортного средства, которая включает в себя новое крепление, отличается от размеров слепой зоны одного транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Из этого следует, что в таких ситуациях, где крепления добавлены к транспортному средству, регулировки системы обнаружения слепой зоны транспортного средства могут быть необходимы для продолжения обеспечения точного обнаружения слепой зоны.
[0005] Примерные варианты выполнения обеспечивают систему обнаружения слепой зоны («систему BSD») на транспортном средстве, состоящую из одного или более датчиков обнаружения слепой зоны. Система обнаружения слепой зоны может включать в себя инструмент обнаружения слепой зоны («инструмент BSD»), запускаемый по меньшей мере частично в вычислительной системе, которая является частью транспортного средства. Инструмент BSD может быть выполнен с возможностью приема информации датчика, идентифицирующей, имеется ли объект в пределах определенной области слепой зоны, которая окружает транспортное средство. Дополнительно инструмент BSD может принимать информацию о прицепе, когда крепление прицепа прикреплено к транспортному средству. На основе принимаемой информации о прицепе инструмент BSD может регулировать параметры области слепой зоны, используемой алгоритмом обнаружения слепой зоны, с учетом дополнительного наличия прицепа.
[0006] Согласно некоторым вариантам выполнения инструмент BSD может управляться с возможностью эксплуатации в пределах целевого уровня ложного и/или ошибочного обнаружения объекта в пределах регулируемых областей обнаружения слепой зоны (например, целевой уровень может составлять менее 5% ложного и/или ошибочного обнаружения объекта в пределах регулируемых областей обнаружения слепой зоны). Таким образом, инструмент BSD может регулировать параметры области слепой зоны с учетом дополнительного наличия прицепа, при этом также ограничивая ложное и/или ошибочное обнаружение объектов в пределах регулируемой области слепой зоны для нахождения в пределах целевого уровня.
[0007] Согласно первому аспекту изобретения предложено транспортное средство, содержащее: кузов, двигатель, тормоза, сцепное устройство, процессор, соединенный с датчиками и выполненный с возможностью: обнаруживать прицепленный прицеп и в ответ: суммировать по отдельности длины упомянутого сцепного устройства, прицепа, буферной зоны и транспортного средства; идентифицировать позицию(и) объекта(ов) на основании сигналов датчиков; автоматически запускать первый отклик, только когда позиция(и) находится в пределах суммированной длины; разрешать только пользовательскую регулировку длины буферной зоны выше предварительно заданной стандартной длины.
Согласно одному варианту осуществления транспортного средства первый отклик включает в себя автоматическое отключение круиз-контроля транспортного средства.
Согласно другому варианту осуществления транспортного средства первый отклик включает в себя мигание лампы, установленной на зеркале заднего вида кузова.
Согласно другому варианту осуществления транспортного средства процессор выполнен с возможностью запускать первый отклик, только когда процессор обнаруживает изменение полосы движения транспортного средства.
Согласно другому варианту осуществления транспортного средства изменением полосы движения транспортного средства является управление рулем транспортного средства на полосу движения, имеющую идентифицированный объект(ы).
Согласно другому варианту осуществления транспортного средства определяемая длина параллельна продольной оси транспортного средства.
Согласно другому варианту осуществления транспортного средства упомянутая длина транспортного средства является продольной длиной от по меньшей мере одного из датчиков до задней поверхности транспортного средства.
Согласно другому варианту осуществления транспортного средства процессор выполнен с возможностью оценивать сигналы от по меньшей мере двух отдельных датчиков для обнаружения прицепленного прицепа.
[0008] Согласно второму аспекту изобретения предложен способ определения слепой зоны для транспортного средства, имеющего кузов, двигатель, тормоза, сцепное устройство и процессор, соединенный с датчиками, содержащий этапы, выполняемые процессором, на которых: обнаруживают прицепленный прицеп и в ответ: суммируют по отдельности длины упомянутого сцепного устройства, прицепа, буферной зоны и транспортного средства; идентифицируют позицию(и) объекта(ов) на основании сигналов датчиков; автоматически запускают первый отклик, только когда позиция(и) находится в пределах суммированной длины; разрешают только пользовательскую регулировку длины буферной зоны выше предварительно заданной стандартной длины.
Согласно одному варианту осуществления способа первый отклик включает в себя автоматическое отключение круиз-контроля транспортного средства.
Согласно другому варианту осуществления способа первый отклик включает в себя мигание лампы, установленной на зеркале заднего вида кузова.
Согласно другому варианту осуществления способа процессор выполнен с возможностью запускать первый отклик, только когда процессор обнаруживает изменение полосы движения транспортного средства.
Согласно другому варианту осуществления способа изменением полосы движения транспортного средства является управление рулем транспортного средства на полосу движения, имеющую идентифицированный объект(ы).
Согласно другому варианту осуществления способа определяемая длина параллельна продольной оси транспортного средства.
Согласно другому варианту осуществления способа упомянутая длина транспортного средства является продольной длиной от по меньшей мере одного из датчиков до задней поверхности транспортного средства.
Согласно другому варианту осуществления способа процессор выполнен с возможностью оценивать сигналы от по меньшей мере двух отдельных датчиков для обнаружения прицепленного прицепа.
[0009] Эта заявка определена приложенной формулой изобретения. Описание обобщает аспекты вариантов выполнения и не должно использоваться для ограничения формулы изобретения. Другие варианты выполнения предусматриваются в соответствии с технологиями, описанными здесь, как будет ясно при рассмотрении следующих далее чертежей и подробного описания, и такие варианты выполнения предназначены находиться в пределах объема этой заявки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00010] Для лучшего понимания изобретения может быть выполнена ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах необязательно масштабировать, и соответствующие элементы могут быть исключены так, чтобы выделять и ясно иллюстрировать новые признаки, описанные здесь. В дополнение компоненты системы могут быть выполнены различным образом, как известно в уровне техники. На фигурах одинаковые ссылочные позиции могут относиться к одинаковым частям на всех различных фигурах, кроме тех случаев, когда определено иное.
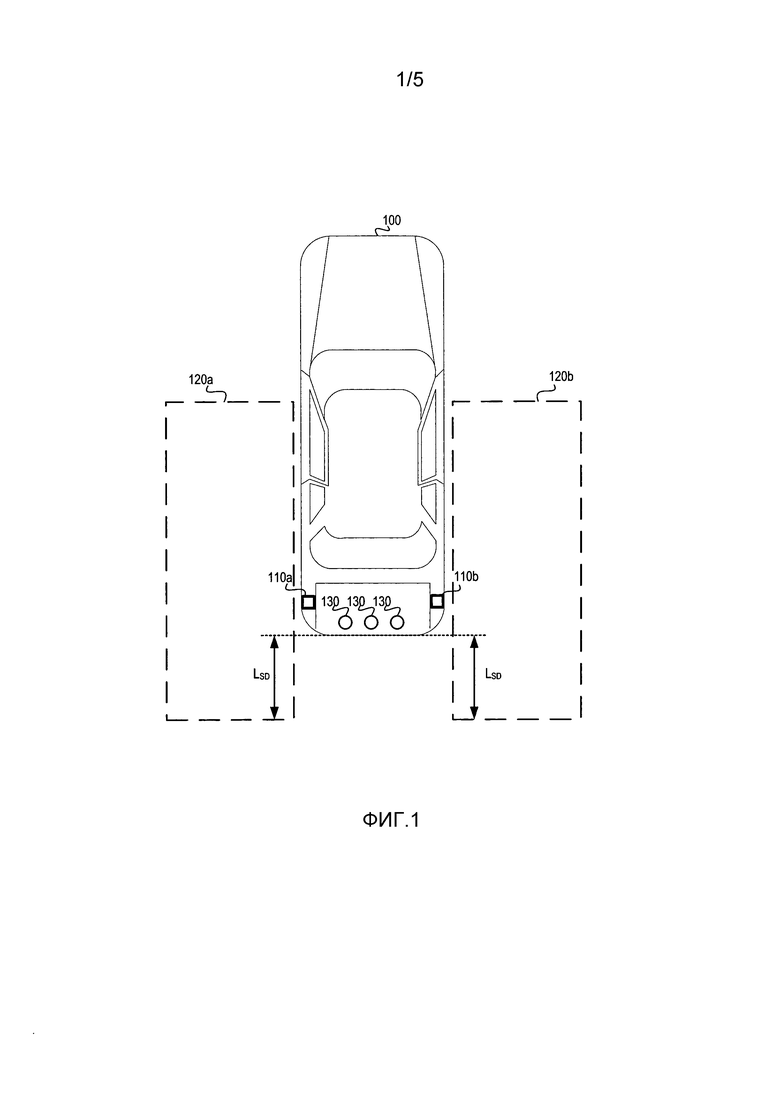
[00011] Фигура 1 иллюстрирует примерную систему обнаружения слепой зоны транспортного средства, включающую в себя датчики транспортного средства, а также определенную область слепой зоны согласно некоторым вариантам выполнения;
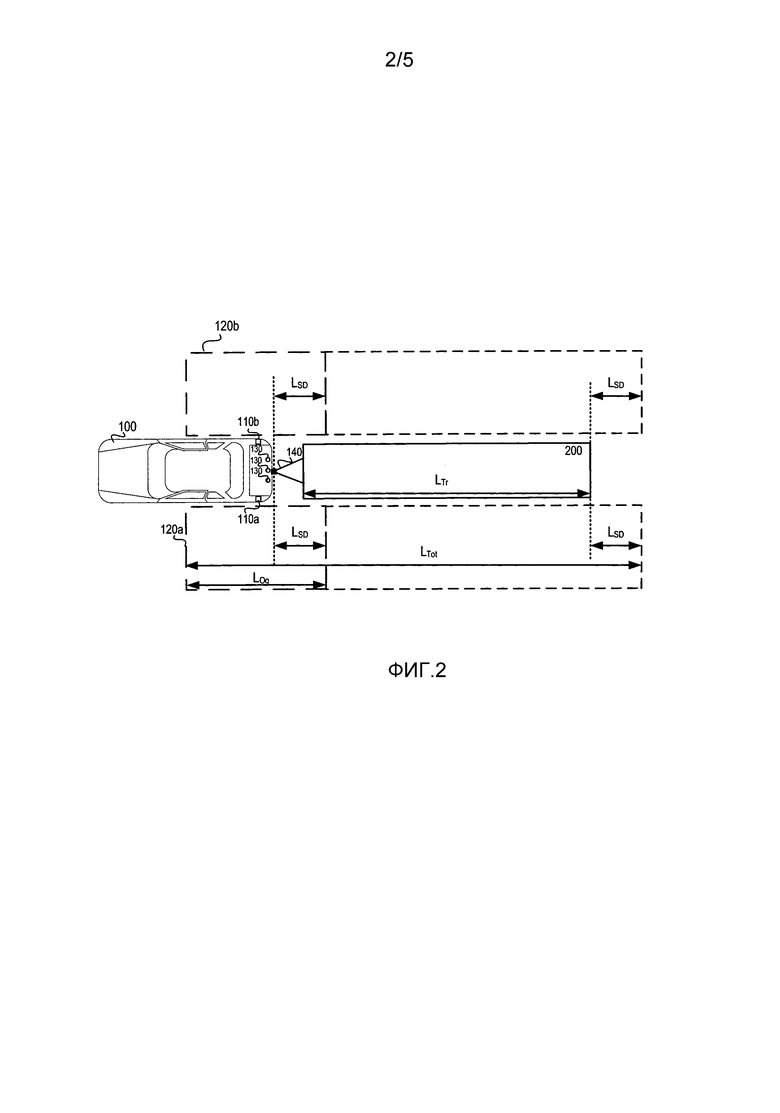
[00012] Фигура 2 иллюстрирует примерную систему обнаружения слепой зоны транспортного средства, эксплуатируемую с прикрепленным прицепом согласно некоторым вариантам выполнения;
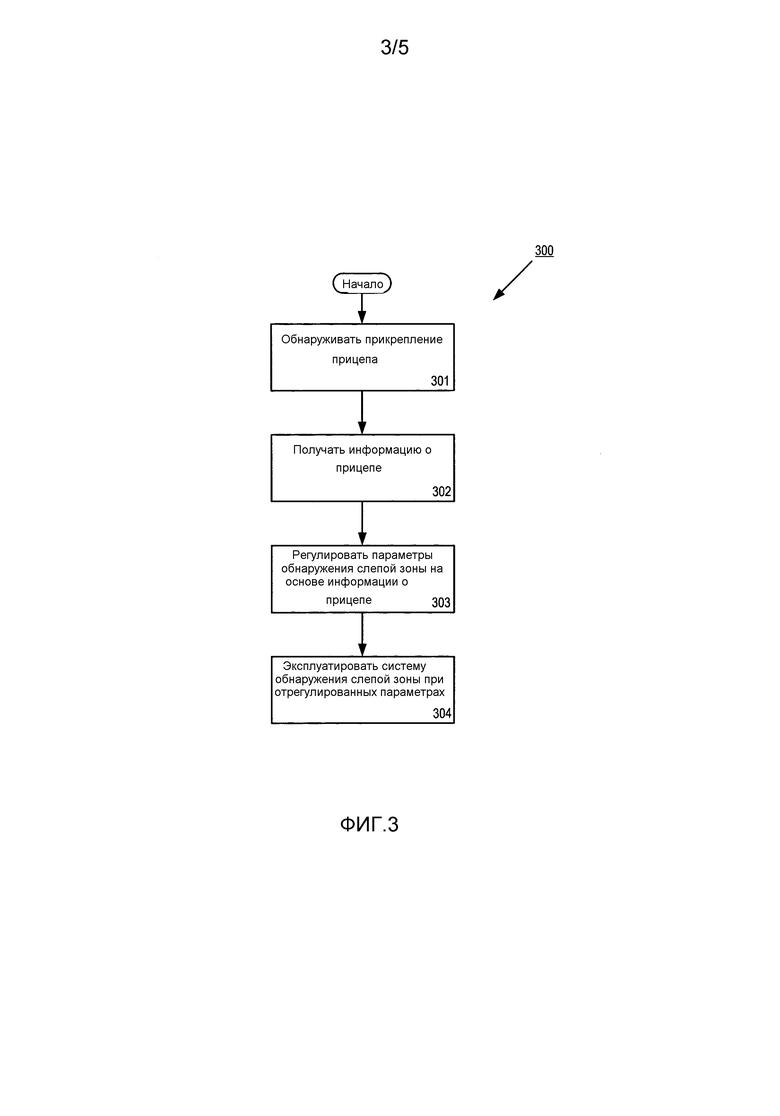
[00013] Фигура 3 иллюстрирует примерную блок-схему, описывающую процесс, осуществляемый инструментом обнаружения слепой зоны согласно некоторым вариантам выполнения;
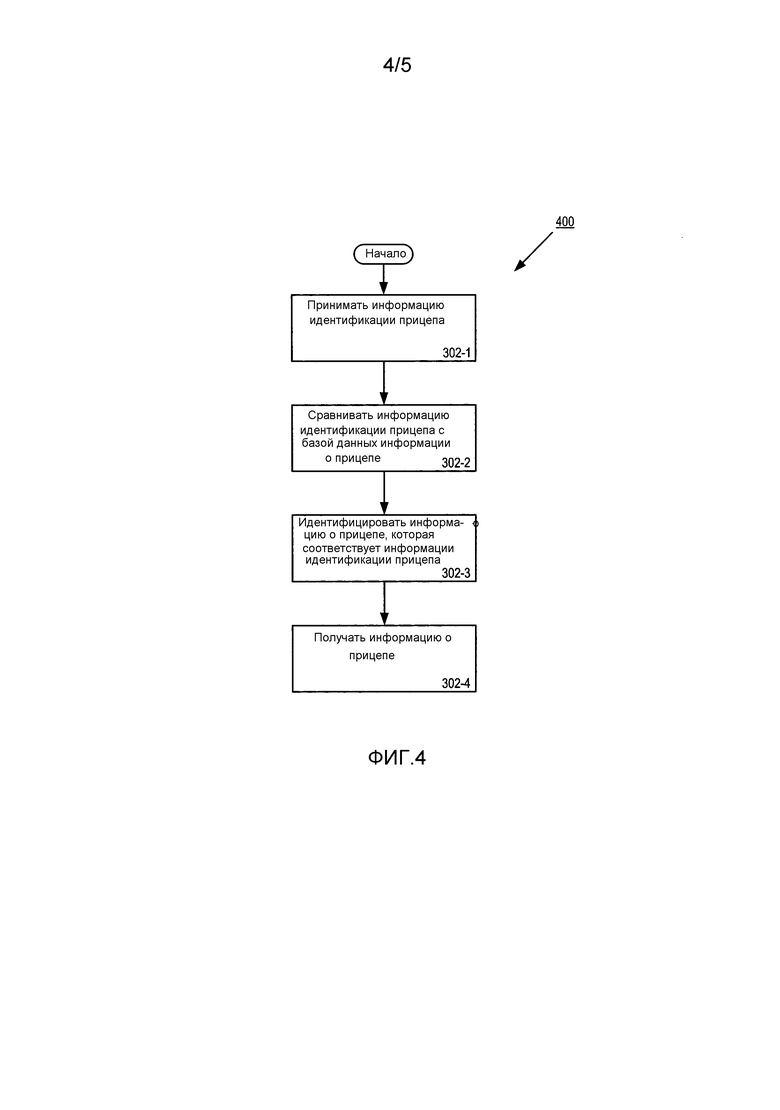
[00014] Фигура 4 иллюстрирует расширение этапа, обеспеченного в блок-схеме на Фигуре 3 согласно некоторым вариантам выполнения; и
[00015] Фигура 5 иллюстрирует примерную компьютерную систему, включенную в транспортное средство согласно некоторым вариантам выполнения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[00016] Несмотря на то, что изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и не ограничивающие варианты выполнения с пониманием того, что настоящее изобретение подлежит рассмотрению в качестве примера изобретения и не предназначено для ограничения изобретения конкретными проиллюстрированными вариантами выполнения. Однако не все из изображенных компонентов, описанных в этом раскрытии, могут требоваться, и некоторые варианты выполнения могут включать в себя дополнительные, различные компоненты или меньшее количество компонентов из компонентов, прямо описанных в этом раскрытии. Изменения конструкции и типа компонентов могут быть выполнены без отклонения от замысла или объема формулы изобретения, которая изложена здесь.
[00017] Транспортное средство 100, проиллюстрированное на Фигуре 1, выполнено с возможностью включения в себя системы BSD для обнаружения объектов, которые имеются в пределах одной или более обозначенных областей слепой зоны. Система BSD может включать в себя датчик 110а обнаружения слепой зоны со стороны водителя («BSDS со стороны водителя») и датчик 110b обнаружения слепой зоны со стороны пассажира («BSDS со стороны пассажира»). BSDS 110а со стороны водителя может быть выполнен с возможностью восприятия объектов, которые имеются в пределах области 120а обнаружения слепой зоны со стороны водителя («BSDA со стороны водителя»). BSDS 110b со стороны пассажира может быть выполнен с возможностью восприятия объектов, которые имеются в пределах области 120b обнаружения слепой зоны со стороны пассажира («BSDA со стороны пассажира»). BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира могут представлять собой радиолокационный датчик объекта, датчик объекта на основе лидара, электромагнитный датчик приближения объекта, ультразвуковой датчик приближения объекта или другой подобный тип датчика, способного обнаруживать объекты и измерять расстояние таких обнаруженных объектов от транспортного средства 100. Согласно некоторым вариантам выполнения BSDS 110а со стороны водителя может представлять собой модуль обнаружения объекта, дополнительно состоящий из датчика объекта, процессора, памяти и шин соединений, выполненных с возможностью приема информации (например, информации, соответствующей воспринимаемым объектам в пределах BSDA 120а со стороны водителя, или принимаемой информации о прицепе, которая описана здесь), и регулировки BSDA 120а со стороны водителя согласно любому одному или более из способов регулировки BSDA, описанных здесь. Подобным образом, согласно некоторым вариантам выполнения BSDS 110b со стороны пассажира может представлять собой модуль обнаружения объекта, состоящий из датчика объекта, процессора, памяти и шин соединений, выполненных с возможностью приема информации (например, информации, соответствующей воспринимаемым объектам в пределах BSDA 120b со стороны пассажира, или принимаемой информации о прицепе, которая описана здесь) и регулировки BSDA 120b со стороны пассажира согласно любому одному или более из способов регулировки BSDA, описанных здесь.
[00018] Несмотря на то, что система BSD, проиллюстрированная на Фигуре 1, описана как включающая в себя BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира, в пределах объема системы BSD, описанной здесь, находится включение в себя меньшего или большего количества таких датчиков обнаружения слепой зоны. Дополнительно, несмотря на то, что BSDA 120а со стороны водителя и BSDA 120b со стороны пассажира проиллюстрированы на Фигуре 1 как принимающие прямоугольное очертание, в пределах объема системы BSD, описанной здесь, находится создание области обнаружения слепой зоны, которая принимает различные формы и/или очертания. Например, область обнаружения слепой зоны, созданная системой BSD, может принимать более радиальное очертание для соответствия диапазону восприятия для BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира.
[00019] Фигура 1 иллюстрирует BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира как располагаемые для примера в задней секции транспортного средства 100. Однако в других вариантах выполнения BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира могут быть расположены в других положениях на транспортном средстве 100. Например, BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира могут быть расположены на зеркале заднего вида со стороны водителя и зеркале заднего вида со стороны пассажира соответственно. Другие местоположения для BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира также находятся в пределах объема системы BSD, описанной здесь.
[00020] Также в пределах объема системы BSD этого раскрытия находится управление BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира с возможностью создания областей обнаружения слепой зоны, которые принимают другие формы и/или очертания, которые могут быть созданы в пределах диапазона BSDS 110а со стороны водителя и BSDS 110b со стороны пассажира.
[00021] Система BSD также может включать в себя или использовать один или более задних датчиков 130 парковки. Задние датчики 130 парковки могут, например, представлять собой электромагнитный датчик приближения или ультразвуковой датчик приближения. Дополнительно, несмотря на то, что система BSD, проиллюстрированная на Фигуре 1, описана как включающая в себя три задних датчика 130 парковки, в пределах объема BSD, описанной здесь, находится включение в себя меньшего или большего количества таких задних датчиков 130 парковки.
[00022] Признаки, описанные здесь, могут быть осуществлены инструментом BSD, запускаемым по меньшей мере частично в транспортном средстве 100. Инструмент BSD может представлять собой программу, приложение и/или некоторую совокупность программного обеспечения и аппаратного обеспечения, которая включена в один или более из компонентов, которые содержат операционную систему транспортного средства. Дополнительное описание инструмента BSD и компонентов системы транспортного средства, запускающей инструмент BSD, описано более подробно ниже.
[00023] Транспортное средство 100, проиллюстрированное на Фигуре 1, включает в себя систему BSD и также понимается как запускающее инструмент BSD для осуществления BSDA 120а со стороны водителя, имеющей первоначальную длину LOg. Подобным образом, транспортное средство 100 понимается как запускающее инструмент BSD для осуществления BSDA 120b со стороны пассажира, имеющей первоначальную длину LOg. Первоначальная длина областей 120a и 120b обнаружения слепой зоны, LOg, определяется как имеющая форму или очертание согласно любому из способов, описанных здесь. Дополнительно, инструмент BSD может быть выполнен с возможностью управления первоначальной длиной, LOg, от которой требуется продолжаться по меньшей мере на стандартную длину за пределами задней части транспортного средства 100. Это стандартное расстояние LSD может, например, быть установлено равным 3 метрам. Стандартное расстояние может быть определено на основе требования, позаимствованного из известного стандарта для обнаружения слепой зоны и/или помощи при смене полосы (например, ISO 17387), который предусматривает минимальное расстояние от задней части транспортного средства и/или крепления, прикрепленного к транспортному средству, которое должна достигать область обнаружения слепой зоны. В некоторых вариантах выполнения пассажиру может быть позволено вводить команды для установки стандартного расстояния LSD в пределах диапазона допустимых длин. Например, пассажир может дополнительно продолжать 3-метровое стандартное расстояние LSD до большего расстояния для того, чтобы продолжать область обнаружения слепой зоны, но пассажиру не может быть дополнительно позволено уменьшать 3-метровое стандартное расстояние LSD, которое может пониматься как минимальное расстояние, на которое область обнаружения слепой зоны должна продолжаться от задней части транспортного средства и/или креплений от транспортного средства.
[00024] Фигура 2 иллюстрирует транспортное средство 100, имеющее прицеп 200, прикрепленный к транспортному средству 100 с помощью сцепного устройства 140 прицепа. Система BSD с Фигуры 1 также описана как включенная в транспортное средство 100, проиллюстрированное на Фигуре 2. Транспортное средство 100, проиллюстрированное на Фигуре 2, включает в себя систему BSD и также понимается как запускающее инструмент BSD для того, чтобы эксплуатировать признаки системы BSD. Дополнительное описание обеспечено ниже.
[00025] Прицеп 200, проиллюстрированный на Фигуре 2, показан как имеющий длину LTr. Когда прицеп 200 прикреплен к транспортному средству 100, рабочий размер системы транспортного средства, которая включает в себя транспортное средство 100 и прицеп 200, увеличивается. Конкретнее, длина системы транспортного средства увеличивается с длины только транспортного средства до прикрепления прицепа до общей длины транспортного средства, длины (LTr) прицепа и длины для сцепного устройства 140 прицепа, когда прицеп 200 прикреплен. Из этого следует, что если инструмент BSD должен поддерживать требования поддержания требования иметь области обнаружения слепой зоны, которые обнаруживают объекты, которые находятся по меньшей мере на минимальном стандартном расстоянии LSD от задней части системы транспортного средства, инструменту BSD будет необходимо модифицировать определенные параметры системы обнаружения слепой зоны.
[00026] Например, инструмент BSD может принимать входные данные, указывающие на то, что прицеп 200 прикреплен к транспортному средству 100. Далее на основе приема таких входных данных, идентифицирующих прицеп 200, прикрепленный к транспортному средству, инструмент BSD может распознавать, что может быть необходима регулировка параметров алгоритма, используемого для управления эксплуатацией системы BSD. Инструмент BSD может, например, принимать сигнал подтверждения крепления от модуля прицепа, выполненного с возможностью передачи сигнала подтверждения крепления, когда прицеп 200 соединен с интерфейсом прицепа транспортного средства 100. Модуль прицепа может автоматически передавать сигнал подтверждения крепления, когда прицеп 200 соединен с интерфейсом прицепа транспортного средства 100, без приглашения от транспортного средства 100.
[00027] В других вариантах выполнения инструмент BSD может распознавать, что прицеп 200 прикреплен к транспортному средству 100, когда инструмент BSD обнаруживает, что прицеп 200 соединен с транспортным средством 100 с помощью интерфейса прицепа транспортного средства 100. Например, инструмент BSD может наблюдать схему в транспортном средстве для того, чтобы обнаруживать прерывание тока в схеме транспортного средства, вызываемое дополнительной нагрузкой прицепа 200, соединяемого с интерфейсом прицепа транспортного средства 100. При обнаружении прерывания или другого изменения нагрузки на схеме инструмент BSD может определять, что прицеп 200 был прикреплен к транспортному средству 100.
[00028] В других вариантах выполнения инструмент BSD может принимать входные данные от пассажира транспортного средства 100, вводящего такие входные данные в интерфейс управления в кабине транспортного средства. Входные данные пассажира могут указывать BDS, что прицеп 200 был прикреплен.
[00029] В других вариантах выполнения по меньшей мере один из BSDS 110а со стороны водителя или BSDS 110b со стороны пассажира может использоваться для распознавания прицепа 200, располагаемого сзади транспортного средства 100. Например, в ситуации, где модуль прицепа не доступен или не функционирует должным образом, BSDS 110а со стороны водителя и/или BSDS 110b со стороны пассажира может воспринимать прицеп 200 как расположенный сзади транспортного средства 100 и передавать информацию датчика, описывающую прицеп 200, инструменту BSD, запускаемому в вычислительном устройстве транспортного средства 100. Инструмент BSD может далее принимать информацию датчика, анализировать информацию датчика и определять, что прицеп 200 прикреплен к транспортному средству 100, на основе распознавания прицепа 200 из информации датчика, принимаемой от BSDS 110а со стороны водителя и/или BSDS 110b со стороны пассажира. Анализ может быть способен обнаруживать наличие прицепа 200 сзади транспортного средства 100 и может дополнительно обнаруживать размер или очертание прицепа 200 для определения того, что объект сзади транспортного средства 100 вероятно представляет собой прицеп.
[00030] В дополнение, согласно некоторым вариантам выполнения, инструмент BSD может дополнительно полагаться на задние датчики 130 парковки для подтверждения того, что прицеп 200 прикреплен к транспортному средству 100. Например, в ситуации, где модуль прицепа не доступен или не функционирует должным образом, инструмент BSD может принимать информацию датчика от задних датчиков 130 парковки, анализировать информацию датчика и определять, что прицеп 200 прикреплен к транспортному средству 100, на основе анализа. Анализ может быть способен обнаруживать наличие прицепа 200 сзади транспортного средства 100 и может дополнительно обнаруживать размер или очертание прицепа 200 для определения того, что объект сзади транспортного средства 100 вероятно представляет собой прицеп. Согласно некоторым вариантам выполнения одни задние датчики 130 парковки могут использоваться инструментом BSD для обнаружения крепления прицепа 200 к транспортному средству 100. В других вариантах выполнения BSDS 110а со стороны водителя и/или BSDS 110b со стороны пассажира может быть применен инструментом BSD для первоначального обнаружения наличия прицепа 200, который описан выше, и далее задние датчики 130 парковки могут быть дополнительно применены инструментом BSD для обеспечения вспомогательной информации для подтверждения наличия прицепа 200, который первоначально обнаружен BSDS 110а со стороны водителя и/или BSDS 110b со стороны пассажира.
[00031] После приема сигнала, указывающего на то, что прицеп 200 был прикреплен к транспортному средству 100, инструмент BSD может принимать информацию о прицепе, идентифицирующую, например, размеры прицепа 200 (например, информацию о ширине, длине, высоте). В некоторых вариантах выполнения инструмент BSD может принимать информацию о прицепе на основе входных данных от пассажира транспортного средства 100, вводящего такие входные данные в интерфейс управления в кабине транспортного средства. Входные данные пассажира могут идентифицировать информацию о размере для прицепа 200.
[00032] В дополнение или альтернативно входные данные пассажира могут идентифицировать номер/идентификацию модели прицепа 200. В таких вариантах выполнения инструмент BSD может сравнивать номер/идентификацию модели прицепа с базой данных информации о прицепах. Если инструмент BSD способен находить соответствующую запись в базе данных прицепов на основе принимаемой информации о модели/идентификации прицепа, инструмент BSD может отыскивать информацию о прицепе, которая соответствует соответствующей информации о модели/идентификации прицепа в базе данных прицепов, и ссылаться на соответствующую информацию о прицепе из базы данных прицепов как на информацию о прицепе для прикрепленного прицепа 200. База данных прицепов может храниться в блоке хранилища памяти, который включен в виде части вычислительной системы, запускающей инструмент BSD.
[00033] Согласно некоторым вариантам выполнения информация о прицепе может быть получена с помощью автоматического процесса. После приема сигнала, указывающего на то, что прицеп 200 был прикреплен к транспортному средству 100, инструмент BSD может принимать информацию о номере/идентификации модели прицепа от модуля прицепа 200. Инструмент BSD может сравнивать номер/идентификацию модели прицепа с базой данных информации о прицепах. Если инструмент BSD способен находить соответствующую запись в базе данных прицепов на основе принимаемой информации о модели/идентификации прицепа, инструмент BSD может отыскивать информацию о прицепе, которая соответствует соответствующей информации о модели/идентификации прицепа в базе данных прицепов, и ссылаться на соответствующую информацию о прицепе из базы данных прицепов как на информацию о прицепе для прикрепленного прицепа 200. База данных прицепов может храниться в блоке хранилища памяти, который включен в виде части вычислительной системы, запускающей инструмент BSD.
[00034] В дополнение или альтернативно инструмент BSD, запускаемый в вычислительной системе, включенной в транспортное средство 100, может непосредственно принимать информацию, идентифицирующую размеры прицепа 200, от модуля на прицепе 200.
[00035] После получения информации о прицепе согласно любому из способов, описанных здесь, инструмент BSD может регулировать один или более параметров обнаружения слепой зоны на основе полученной информации о прицепе. Например, в отношении создания одной или более областей обнаружения слепой зоны инструмент BSD может регулировать рабочую длину транспортного средства 100 до рабочей длины системы транспортного средства, состоящей из транспортного средства 100 и прицепа 200. Из этого следует, что область обнаружения слепой зоны может регулироваться с учетом прикрепленного прицепа 200. Таким образом, поскольку область обнаружения слепой зоны может эксплуатироваться с возможностью обнаружения объектов по меньшей мере на стандартном расстоянии (LSD) от задней части транспортного средства 100 и за пределами, инструмент BSD может регулировать параметры областей обнаружения слепой зоны для обнаружения объектов по меньшей мере на стандартном расстоянии (LSD) от задней части прицепа 200 и за пределами.
[00036] Таким образом, со ссылкой на примерную систему транспортного средства, проиллюстрированную на Фигуре 2, длина BSDA 120a и 120b со стороны водителя и со стороны пассажира может быть продолжена с LOg до LTot с учетом по меньшей мере добавленной длины (LTr) прицепа 200. Следует отметить, что в некоторых вариантах выполнения длина сцепного устройства 140 прицепа также может учитываться при генерации новой общей длины LTot областей 120а и 120b слепой зоны. Информация, идентифицирующая длину сцепного устройства 140 прицепа, может быть получена согласно любому одному или более из описанных способов получения информации о прицепе, описанной здесь.
[00037] Фигура 3 иллюстрирует блок-схему 300, которая описывает процесс регулировки параметра, на который ссылается инструмент BSD во время эксплуатации по обнаружению слепой зоны. Инструмент BSD может запускаться в вычислительной системе (например, вычислительной системе 500, описанной со ссылкой на Фигуру 5), которая представляет собой часть транспортного средства, которое дополнительно включает в себя систему BSD, которая описана здесь. В дополнение или альтернативно, согласно некоторым вариантам выполнения, инструмент BSD может запускаться в модуле обнаружения объекта (например, BSDS 110а со стороны водителя и/или BSDS 110b со стороны пассажира согласно некоторым вариантам выполнения), который описан здесь.
[00038] В блоке 301 инструмент BSD может обнаруживать крепление прицепа к транспортному средству. Обнаружение крепления прицепа могут выполнять с помощью инструмента BSD согласно любому одному или более из способов, описанным здесь.
[00039] В блоке 302 инструмент BSD может получать информацию о прицепе. Информация о прицепе может включать в себя по меньшей мере информацию, идентифицирующую размеры прикрепленного прицепа. Дополнительно информацию о прицепе могут получать согласно любому одному или более из способов, описанных здесь. Например, Фигура 4 иллюстрирует блок-схему 400, которая представляет собой расширенный вид примерных этапов, которые могут содержать получение информации о прицепе.
[00040] В блоке 302-1 инструмент BSD может принимать информацию идентификации прицепа. Информацию идентификации прицепа могут получать от модуля прикрепленного прицепа или из входных данных, непосредственно принимаемых от пассажира. В блоке 302-2 инструмент BSD может сравнивать информацию идентификации прицепа с базой данных информации о прицепах, которая описана более подробно здесь. Далее в блоке 302-3 инструмент BSD может идентифицировать информацию о прицепе из базы данных прицепов, которая соответствует принимаемой информации идентификации прицепа, которая описана более подробно здесь. Далее в блоке 302-4 на информацию о прицепе, идентифицированную в блоке 302-3, инструмент BSD может ссылаться как на полученную информацию о прицепе.
[00041] В блоке 303 инструмент BSD может регулировать параметр, на который ссылается инструмент BSD, для эксплуатации системы BSD. Например, инструмент BSD может определять новую рабочую длину для системы транспортного средства, которая включает в себя транспортное средство и прикрепленный прицеп, и регулировать ссылочную длину одной или более областей обнаружения слепой зоны на основе длины только что определенной системы транспортного средства. Регулировку длина областей обнаружения слепой зоны могут выполнять согласно любому одному или более из способов, описанных здесь.
[00042] В блоке 304 инструмент BSD может продолжать эксплуатировать систему BSD с помощью ссылки на информацию о регулируемом параметре. С использованием продолженной области обнаружения слепой зоны инструмент BSD может учитывать крепление прицепа для того, чтобы предотвращать или по меньшей мере минимизировать неправильную интерпретацию обнаружения прицепа одним или более датчиками обнаружения слепой зоны в пределах области, окружающей транспортное средство, в качестве постороннего объекта, которого следует избегать. Например, без регулировки параметров с учетом дополнительной длины прикрепленного прицепа к системе транспортного средства, инструмент BSD может ошибочно принимать участки прикрепленного прицепа в качестве постороннего объекта в пределах области обнаружения слепой зоны. Этот сценарий может вступать в действие, когда транспортное средство приступает к маневрам смены полосы, где участки прицепа могут находиться не в одной линии с транспортным средством. Из этого следует, что с помощью продолжения областей обнаружения слепой зоны с учетом прикрепленного прицепа, как описано здесь, инструмент BSD может предотвращать или по меньшей мере уменьшать возникновение сообщений ошибочного предупреждения, генерируемых на основе обнаружения прицепа в пределах области обнаружения слепой зоны.
[00043] Из этого следует, что, начиная в блоке 304, инструмент BSD может обнаруживать объекты в пределах продолженной области обнаружения слепой зоны. Например, на Фигуре 2, согласно процессу, описанному блок-схемой 300, BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира транспортного средства 100 может продолжаться с первоначальной длины LOg до продолженной общей длины LTot, которая продолжается на установленное расстояние LSD (например, 3 метра) сзади конца прикрепленного прицепа 200. Из этого следует, что при обнаружении объекта в пределах продолженной BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира, сигнал может генерироваться вычислительной системой, запускающей инструмент BSD.
[00044] Сигнал может управлять дисплеем в кабине транспортного средства для отображения сообщения предупреждения, идентифицирующего объект в пределах продолженной BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира. Дополнительно сигнал может управлять индикатором (например, индикатором LED освещения), расположенным снаружи кабины транспортного средства (например, расположенным на одном или более наружных зеркалах заднего вида со стороны водителя и/или со стороны пассажира) с возможностью активации для того, чтобы указывать на то, что объект находится в пределах продолженной BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира.
[00045] В дополнение или альтернативно сигнал может управлять устройством аудиовывода (например, динамиком) в кабине транспортного средства с возможностью вывода звукового шума, указывающего на обнаружение объекта в пределах продолженной BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира.
[00046] В дополнение или альтернативно сигнал может управлять одной или более системами транспортного средства на транспортном средстве 100 в виде, например, управления системой круиз-контроля с возможностью переведения из включенного состояния в выключенное состояние при идентификации объекта в продолженной BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира и, в некоторых вариантах выполнения, при обнаружении поворота транспортного средства в смежную область (например, смежную полосу движения), где идентифицирован объект.
[00047] В дополнение или альтернативно сигнал может управлять одной или более системами транспортного средства на транспортном средстве 100 в виде, например, управления тормозной системой транспортного средства с возможностью включения при идентификации объекта в продолженной BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира и, в некоторых вариантах выполнения, при обнаружении поворота транспортного средства в смежную область (например, смежную полосу движения), где идентифицирован объект.
[00048] В дополнение или альтернативно сигнал может управлять одной или более системами транспортного средства на транспортном средстве 100 в виде, например, управления системой рулевого управления транспортного средства для возвращения в полосу движения BSDA 120а со стороны водителя и/или BSDA 120b со стороны пассажира и, в некоторых вариантах выполнения, при обнаружении поворота транспортного средства в смежную область (например, смежную полосу движения), где идентифицирован объект.
[00049] Этапы, идентифицированные в блок-схеме 300, обеспечены исключительно в примерных целях, так как дополнительные этапы или меньшее количество этапов может быть включено в процесс регулировки одного или более параметров, на которые ссылается инструмент BSD, при эксплуатации признака обнаружения слепой зоны системы BSD.
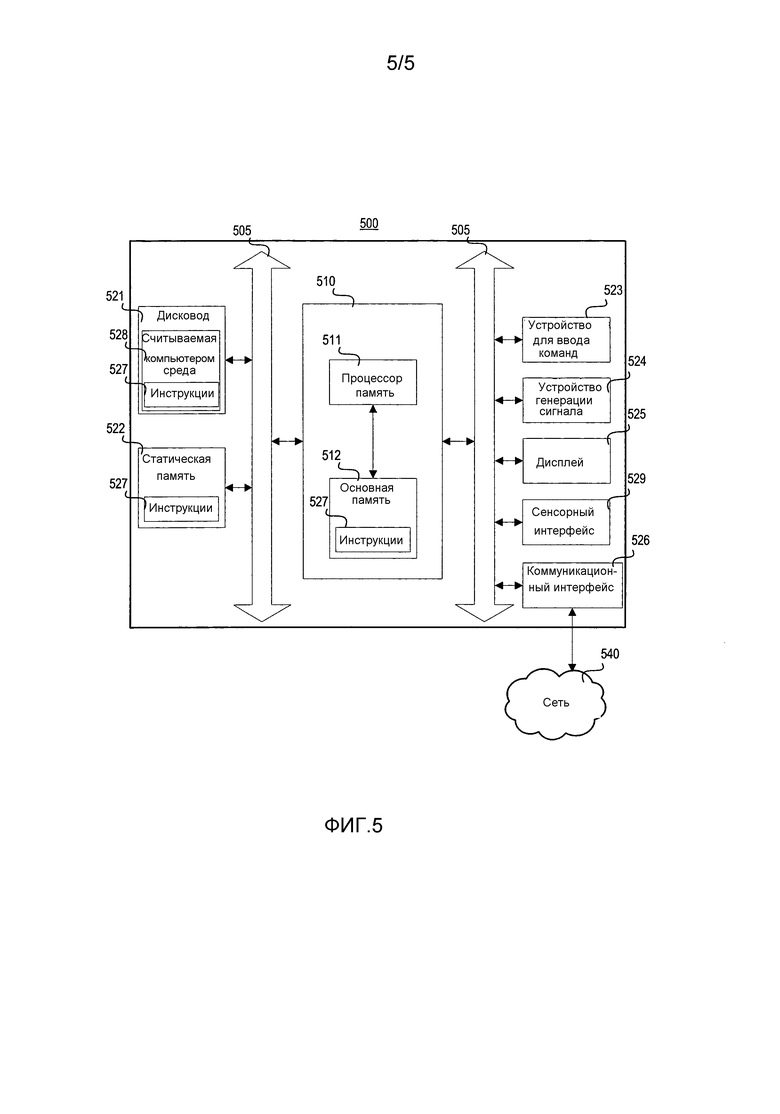
[00050] На Фигуре 5 показан иллюстративный вариант выполнения вычислительной системы 500, которая может использоваться для выполнения любого одного или более из способов, признаков и процессов, рассмотренных здесь. Например, вычислительная система 500 может быть помещена в транспортное средство и может представлять функциональные компоненты транспортного средства, необходимые для осуществления инструмента BSD, описанного здесь.
[00051] Вычислительная система 500 может включать в себя блок 510 обработки, состоящий из процессора 511 на связи с основной памятью 512, причем основная память 512 хранит набор инструкций 527, которые могут выполняться процессором 511, чтобы заставлять вычислительную систему 500 выполнять любой один или более из способов, процессов или компьютерных функций, раскрытых здесь. Например, инструмент BSD, описанный во всем этом раскрытии, может представлять собой программу, которая состоит из набора инструкций 527, которые выполняются для выполнения любого один или более из способов, процессов или компьютерных функций, описанных здесь, таких как процессы определения подходящих регулировок параметра во время признака обнаружения слепой зоны с учетом прицепа, прикрепленного к транспортному средству. Дополнительно, несмотря на то, что проиллюстрирована одна вычислительная система 500, выражение «система» также следует принимать как включающее в себя любую совокупность систем или подсистем, которые отдельно или совместно выполняют набор или множественные наборы инструкций для выполнения одной или более компьютерных функций.
[00052] Как проиллюстрировано на Фигуре 5, вычислительная система 500 может включать в себя процессор 511, такой как центральный блок («CPU») обработки, графический блок («GPU») обработки или оба. Более того, вычислительная система 500 может включать в себя основную память 512 и статическую память 522 (альтернативно энергозависимый тип памяти также может использоваться вместо или в дополнение к статической памяти 522), которые могут коммуницировать друг с другом по шине 505. Как показано, вычислительная система 500 может дополнительно включать в себя блок 525 дисплея, такой как жидкокристаллический дисплей («LCD»), органический светоизлучающий диод («OLED»), плоскопанельный дисплей, твердотельный дисплей или катодно-лучевую трубку («CRT»). Блок 525 дисплея может соответствовать компоненту дисплея навигационной системы, информационно-развлекательной системы транспортного средства, дисплею на лобовом стекле или панели приборов транспортного средства, выполненной с возможностью отображения приглашений пассажиру на ввод информации или отображения сообщений предупреждения, генерируемых инструментом BSD. Дополнительно вычислительная система 500 может включать в себя одно или более устройств 523 для ввода команд, таких как управляющая головка, панель приборов, клавиатура, сканер, цифровая камера для фиксации изображения и/или распознавания визуальной команды, сенсорный экран или устройство аудиоввода, кнопки, мышь или сенсорная панель. Например, пассажир может использовать устройства 523 для ввода команд для ввода команд и информации (например, информации о прицепе), принимаемой инструментом BSD, который описан здесь.
[00053] Вычислительная система 500 также может включать в себя блок 521 дисковода для приема считываемой компьютером среды 528. В особом варианте выполнения блок 521 дисковода может принимать считываемую компьютером среду 528, в которую могут быть встроены один или более наборов инструкций 527, таких как программное обеспечение, соответствующее инструменту BSD. Дополнительно инструкции 527 могут выполнять один или более из способов или логики, которые описаны здесь. В особом варианте выполнения инструкции 527 могут находиться полностью или по меньшей мере частично в любой одной или более из основной памяти 512, статической памяти 522, считываемой компьютером среды 528 и/или в процессоре 511 во время выполнения инструкций 527 процессором 511. Считываемая компьютером среда 528 может включать в себя твердотельную память, такую как карта памяти или другой блок памяти, который вмещает одно или более энергонезависимых постоянных устройств памяти, таких как флэш-память. Дополнительно считываемая компьютером среда 528 может представлять собой память с произвольным доступом или другую энергозависимую перезаписываемую память. Дополнительно считываемая компьютером среда 528 может включать в себя магнитно-оптическую или оптическую среду, такую как диск или ленты или другое устройство для хранения для фиксации информации, коммуницируемой по среде передачи. Соответственно, изобретение рассматривается как включающее в себя любую одну или более из считываемой компьютером среды 528 или среды распределения и других эквивалентов и последующих сред, в которых могут храниться данные или инструкции.
[00054] Вычислительная система 500 также может включать в себя устройство 524 генерации сигнала, такое как динамик или удаленное управление, и сенсорный интерфейс 529. Сенсорный интерфейс 529 может быть выполнен с возможностью приема информации, полученной одним или более датчиками транспортного средства, которые являются частью системы транспортного средства. Например, сенсорный интерфейс 529 может быть выполнен с возможностью приема информации от одного или более датчиков обнаружения слепой зоны и одного или более задних датчиков парковки, которые описаны здесь.
[00055] Вычислительная система 500 может дополнительно включать в себя коммуникационный интерфейс 526. Коммуникационный интерфейс 526 может состоять из сетевого интерфейса (либо проводного, либо беспроводного) для коммуникации с внешней сетью 540. Внешняя сеть 540 может представлять собой совокупность из одной или более сетей, включающих в себя сети на основе стандартов (например, 2G, 3G, 4G, универсальную мобильную телекоммуникационную систему (UMTS), ассоциацию GSM, «Долгосрочное развитие» (LTE) (TM) или более), WiMAX, Bluetooth, коммуникацию ближнего поля (NFC), WiFi (включая 802.11 a/b/g/n/ac или другие), WiGig, сети системы глобального позиционирования (GPS) и другие доступные в момент подачи этой заявки сети или сети, которые могут быть разработаны в будущем. Дополнительно внешняя сеть 540 может представлять собой общедоступную сеть, такую как Интернет, частную сеть, такую как интранет, или их совокупности, и может использовать множество сетевых протоколов, доступных сейчас или разрабатываемых позже, включающих в себя, но не ограниченных, сетевые протоколы на основе TCP/IP. Коммуникационный интерфейс 526 также может представлять собой интерфейс (например, интерфейс прицепа) для коммуникации с модулем прицепа посредством либо проводного, либо беспроводного протокола соединения, который описан здесь. В связи с этим информация, принимаемая от модуля прицепа, может приниматься с помощью коммуникационного интерфейса 526.
[00056] В некоторых вариантах выполнения программа, которая выполняет инструмент BSD и/или обновляется до инструмента BSD, может загружаться и храниться в любой одной или более из основной памяти 512, считываемой компьютером среды 528 или статической памяти 522 с помощью передачи по сети 540 от стороннего сервера. Дополнительно в некоторых вариантах выполнения инструмент BSD, запускаемый в вычислительной системе 500, может коммуницировать с информационным сервером по сети 540.
[00057] Любые описания процесса или блоки на фигурах следует понимать как представляющие модули, сегменты или участки кода, которые включают в себя одну или более выполняемых инструкций для осуществления конкретных логических функций или этапов в процессе, и альтернативные варианты выполнения включены в объем вариантов выполнения, описанных здесь, в которых функции могут выполняться в порядке, отличном от показанного или рассмотренного порядка, включая по существу одновременно или в обратном порядке, в зависимости от предполагаемой функциональности, как будет понятно специалисту в области техники.
[00058] Следует подчеркнуть, что выше описанные варианты выполнения, особенно любые «предпочтительные» варианты выполнения, представляют собой возможные примеры вариантов выполнения, изложенные всего лишь для ясного понимания принципов изобретения. Многие изменения и преобразования выше описанного варианта выполнения (вариантов выполнения) могут быть выполнены без отклонения по существу от замысла и принципов технологий, описанных здесь. Все такие преобразования предназначены для включения здесь в пределы объема этого раскрытия и для защиты следующей далее формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| СИСТЕМА ДЛЯ УМЕНЬШЕНИЯ СЛЕПОЙ ЗОНЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2707496C1 |
| КОНТРОЛЛЕР ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ АВТОНОМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2705885C1 |
| СИСТЕМА ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ ВОКРУГ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2678909C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ФИЗИЧЕСКИХ УГРОЗ, ПРИБЛИЖАЮЩИХСЯ К ТРАНСПОРТНОМУ СРЕДСТВУ (ВАРИАНТЫ), И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2689902C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2678459C2 |
| СИСТЕМА ИНВЕНТАРИЗАЦИИ СОДЕРЖИМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2663255C2 |
| КОНСТРУКЦИЯ, ОБЕСПЕЧИВАЮЩАЯ ВНУТРЕННЕЕ ПРОСТРАНСТВО, И СПОСОБ ЕЕ ПРОИЗВОДСТВА (ВАРИАНТЫ) | 2021 |
|
RU2837962C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОЙ ОЦЕНКИ ХОДА ТРЕНИРОВОЧНОГО УПРАЖНЕНИЯ | 2014 |
|
RU2645553C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |
Группа изобретений относится к способу определения слепой зоны для транспортного средства и к транспортному средству. Транспортное средство содержит кузов, двигатель, тормоза, сцепное устройство, процессор соединений с датчиками, выполненный с возможностью обнаруживать прицепленный прицеп. В ответ на обнаружение прицепа суммируют по отдельности длины сцепного устройства, прицепа, буферной зоны и транспортного средства. Идентифицируют позиции объектов на основании сигналов датчиков. Запускают первый отклик, когда позиции находятся в пределах суммированной зоны. Кроме того, разрешают только пользовательскую регулировку длины буферной зоны выше предварительно заданной стандартной длины. Обеспечивается более точное определение слепой зоны транспортного средства с прицепом. 2 н. и 14 з.п. ф-лы. 5 ил.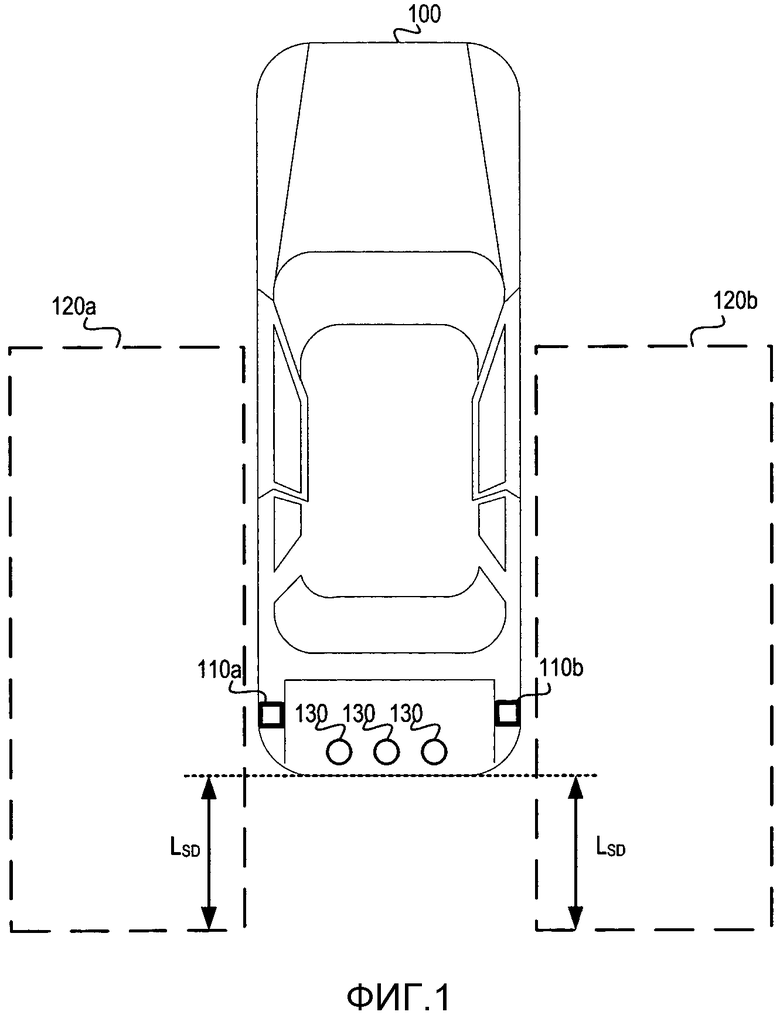
1. Транспортное средство, содержащее:
кузов, двигатель, тормоза, сцепное устройство, процессор, соединенный с датчиками и выполненный с возможностью:
обнаруживать прицепленный прицеп и в ответ:
суммировать по отдельности длины упомянутого сцепного устройства, прицепа, буферной зоны и транспортного средства;
идентифицировать позицию(и) объекта(ов) на основании сигналов датчиков;
автоматически запускать первый отклик, только когда позиция(и) находится в пределах суммированной длины;
разрешать только пользовательскую регулировку длины буферной зоны выше предварительно заданной стандартной длины.
2. Транспортное средство по п.1, в котором первый отклик включает в себя автоматическое отключение круиз-контроля транспортного средства.
3. Транспортное средство по п.1, в котором первый отклик включает в себя мигание лампы, установленной на зеркале заднего вида кузова.
4. Транспортное средство по п.2, в котором процессор выполнен с возможностью запускать первый отклик, только когда процессор обнаруживает изменение полосы движения транспортного средства.
5. Транспортное средство по п.4, в котором изменением полосы движения транспортного средства является управление рулем транспортного средства на полосу движения, имеющую идентифицированный объект(ы).
6. Транспортное средство по п.1, в котором определяемая длина параллельна продольной оси транспортного средства.
7. Транспортное средство по п.1, в котором упомянутая длина транспортного средства является продольной длиной от по меньшей мере одного из датчиков до задней поверхности транспортного средства.
8. Транспортное средство по п.1, в котором процессор выполнен с возможностью оценивать сигналы от по меньшей мере двух отдельных датчиков для обнаружения прицепленного прицепа.
9. Способ определения слепой зоны для транспортного средства, имеющего кузов, двигатель, тормоза, сцепное устройство и процессор, соединенный с датчиками, содержащий этапы, выполняемые процессором, на которых:
обнаруживают прицепленный прицеп и в ответ:
суммируют по отдельности длины упомянутого сцепного устройства, прицепа, буферной зоны и транспортного средства;
идентифицируют позицию(и) объекта(ов) на основании сигналов датчиков;
автоматически запускают первый отклик, только когда позиция(и) находится в пределах суммированной длины;
разрешают только пользовательскую регулировку длины буферной зоны выше предварительно заданной стандартной длины.
10. Способ по п.9, в котором первый отклик включает в себя автоматическое отключение круиз-контроля транспортного средства.
11. Способ по п.9, в котором первый отклик включает в себя мигание лампы, установленной на зеркале заднего вида кузова.
12. Способ по п.10, в котором процессор выполнен с возможностью запускать первый отклик, только когда процессор обнаруживает изменение полосы движения транспортного средства.
13. Способ по п.12, в котором изменением полосы движения транспортного средства является управление рулем транспортного средства на полосу движения, имеющую идентифицированный объект(ы).
14. Способ по п.9, в котором определяемая длина параллельна продольной оси транспортного средства.
15. Способ по п.9, в котором упомянутая длина транспортного средства является продольной длиной от по меньшей мере одного из датчиков до задней поверхности транспортного средства.
16. Способ по п.9, в котором процессор выполнен с возможностью оценивать сигналы от по меньшей мере двух отдельных датчиков для обнаружения прицепленного прицепа.
| US 20140236532 A1, 21.08.2014 | |||
| СПОСОБ СТЕРИЛИЗАЦИИ КОМПОТА ИЗ ЯБЛОК | 2011 |
|
RU2464914C1 |
| US 20140176716 A1, 26.06.2014. | |||

