Область техники, к которой относится изобретение
Настоящее изобретение относится к направляющему механизму и способу его изготовления.
Предпосылки создания изобретения
Из предшествующего уровня техники известен направляющий механизм, использовавшийся в качестве механизма для плавного направления и относительного перемещения двух элементов, которые могут перемещаться друг относительно друга по прямой линии, или в другом варианте изобретения для направления этих элементов с высокой точностью. Направляющий механизм может быть использован в различных типах машин, и в качестве примера такого применения можно назвать гидро(пневмо)цилиндр, такой как исполнительный механизм для скольжения или т.п.
Например, гидро(пневмо)цилиндр, раскрытый в выложенной заявке на патент Японии на полезную модель, опубликованной под № 05-092505, снабжен корпусом цилиндра, поршнем, выполненным с возможностью скольжения в осевом направлении внутри корпуса цилиндра, штоком поршня, закрепленным на поршне и имеющим один конец, который выступает из корпуса цилиндра, и концевой пластиной, закрепленной на конце штока поршня.
Кроме того, гидро(пневмо)цилиндр, раскрытый в выложенной заявке на патент Японии на полезную модель, опубликованной под № 05-092505, дополнительно включает в себя направляющий рельс, закрепленный на корпусе цилиндра, подвижный стол, выполненный с возможностью скольжения относительно направляющего рельса, направляющий элемент, закрепленный на подвижном столе, и множество тел качения (роликовых опор), которые размещены в направляющей канавке, сформированной между направляющим рельсом и направляющим элементом. На одной торцевой поверхности направляющего элемента с помощью винтов закреплен ограничитель пластинчатой формы, предназначенный для предотвращения разъединения тел качения, то есть для предотвращения выпадения этих тел качения из направляющей канавки.
Как раскрыто в выложенной заявке на патент Японии на полезную модель, опубликованной под № 05-092505, в случае конструкции, в которой ограничитель для предотвращения выпадения тел качения закреплен с помощью винтов, прикрепление ограничителя требует выполнения операции резьбы для формирования резьбовых отверстий и операции вкручивания винтов в сформированные резьбовые отверстия.
Сущность изобретения
Настоящее изобретение было разработано с учетом вышеупомянутых проблем, и задачей изобретения является создание направляющего механизма и способа его изготовления, при котором в направляющем механизме, снабженном конструкцией для предотвращения выпадения тел качения из направляющей канавки, можно сократить число этапов обработки и сборки этого механизма.
Для решения поставленной задачи направляющий механизм согласно настоящему изобретению включает в себя направляющий элемент, имеющий первую канавку прямолинейной формы, скользящий элемент, выполненный с возможностью прямолинейного скольжения относительно направляющего элемента и имеющий вторую канавку прямолинейной формы, размещенную напротив первой канавки, и множество тел качения, размещенных в направляющей канавке, образованной первой канавкой и второй канавкой, причем в первой канавке или во второй канавке в результате сварки закреплен ограничитель, предотвращающий выпадение тел качения из направляющей канавки.
В конструкции механизма согласно настоящему изобретению ограничители закреплены в результате сварки, а не с помощью винтов. Поэтому на этапе крепления ограничителей нет никакой необходимости в выполнении операции нарезания резьбы для формирования резьбовых отверстий, и операция вкручивания винтов также не нужна. Кроме того ограничители могут быть закреплены в любом произвольном положении в первой канавке или во второй канавке. В результате число этапов обработки и этапов сборки, необходимых для создания конструкции для предотвращения выпадения тел качения из направляющей канавки, может быть сокращено.
В описанном выше направляющем механизме скользящий элемент может иметь пластинчатую форму, а ограничитель, может быть размещен во второй канавке. В случае, когда скользящий элемент состоит из тонкого элемента, выполнение операции нарезания резьбы является затруднительным или невозможным. Однако конструкция, в которой крепление ограничителей осуществляется в результате сварки, позволяет использовать тонкий скользящий элемент.
В описанном выше направляющем механизме скользящий элемент может включать в себя основание плоской пластинчатой формы и боковые секции, выступающие в направлении толщины основания от обоих концевых участков основания в направлении его ширины, и на каждой из внутренних стенок боковых секций может быть предусмотрена вторая канавка.
Кроме того, способ изготовления направляющего механизма согласно настоящему изобретению, включающего в себя направляющий элемент, имеющий первую канавку прямолинейной формы, скользящий элемент, выполненный с возможностью прямолинейного скольжения относительно направляющего элемента и имеющий вторую канавку прямолинейной формы, размещенную напротив первой канавки, и множество тел качения, размещенных в направляющей канавке, образованной первой канавкой и второй канавкой, заключается в том, что этот способ включает в себя этап сварки, на котором к первой канавке или ко второй канавке в результате сварки сопротивлением присоединяют ограничитель, причем в состоянии, при котором ограничитель приведен в состояние прижатия к первой канавке или ко второй канавке.
Согласно этому способу, так как ограничители прикреплены в результате сварки, а не с помощью винтов, то на этапе прикрепления ограничителей нет никакой необходимости в выполнении операции нарезания резьбы для формирования резьбовых отверстий, и операция вкручивания винтов также не нужна. В результате число этапов обработки и этапов сборки может быть сокращено. Кроме того, так как присоединение осуществляют в результате сварки сопротивлением, то операция крепления ограничителя в результате сварки может быть выполнена эффективно.
В описанном выше способе изготовления направляющего механизма на этапе сварки в состоянии, при котором направляющий элемент или скользящий элемент и ограничитель зажаты между электродами и к этим электродам приложено давление, через них может быть пропущен электрический ток. В соответствии с этим признаком операция прикрепления ограничителя в результате сварки может быть выполнена эффективно.
В описанном выше способе изготовления направляющего механизма на этапе сварки может быть присоединен ограничитель, имеющий сферическую форму.
В соответствии с направляющим механизмом и способом его изготовления согласно настоящему изобретению в направляющем механизме, снабженном конструкцией для предотвращения выпадения тел качения из направляющей канавки, число этапов обработки и сборки этого механизма можно сократить.
Указанные выше цели, возможности и преимущества настоящего изобретения станут более очевидными из приводимого ниже подробного описания, сопровождаемого ссылками на прилагаемые чертежи, на которых предпочтительные варианты осуществления настоящего изобретения иллюстрируются примерами.
Краткое описание чертежей
Фиг. 1 - вид в перспективе исполнительного механизма для скольжения, снабженного направляющим механизмом согласно первому примеру осуществления настоящего изобретения;
Фиг. 2 - вертикальный разрез исполнительного механизма для скольжения, показанного на фиг. 1;
Фиг. 3 - поперечный разрез исполнительного механизма для скольжения, показанного на фиг. 1;
Фиг. 4 - вид в перспективе направляющего механизма в разобранном виде;
Фиг. 5 - вид сверху скользящего элемента с частичным разрезом;
Фиг. 6А - первая наглядная иллюстрация способа сварки ограничителя, фиг. 6В - вторая наглядная иллюстрация способа сварки ограничителя и фиг. 6С - третья наглядная иллюстрация способа сварки ограничителя;
Фиг. 7 - вид в перспективе направляющего элемента согласно модификации;
Фиг. 8 - вид в перспективе исполнительного механизма для скольжения, снабженного направляющим механизмом согласно второму примеру осуществления настоящего изобретения;
Фиг. 9 - вертикальный разрез исполнительного механизма для скольжения, показанного на фиг. 8;
Фиг. 10 - поперечный разрез исполнительного механизма для скольжения, показанного на фиг. 8; и
Фиг. 11 - разрез исполнительного механизма, показанного на фиг. 10, по XI-XI.
Описание вариантов осуществления
Ниже со ссылками на прилагаемые чертежи приводится описание предпочтительных вариантов осуществления направляющего механизма и способа его изготовления согласно настоящему изобретению. В вариантах осуществления исполнительный механизм для скольжения представлен в качестве примера устройства с применением направляющего механизма, однако область применения настоящего изобретения не ограничивается этим примером, и изобретение может быть использовано применительно к различным устройствам, которые включают в себя подвижные элементы.
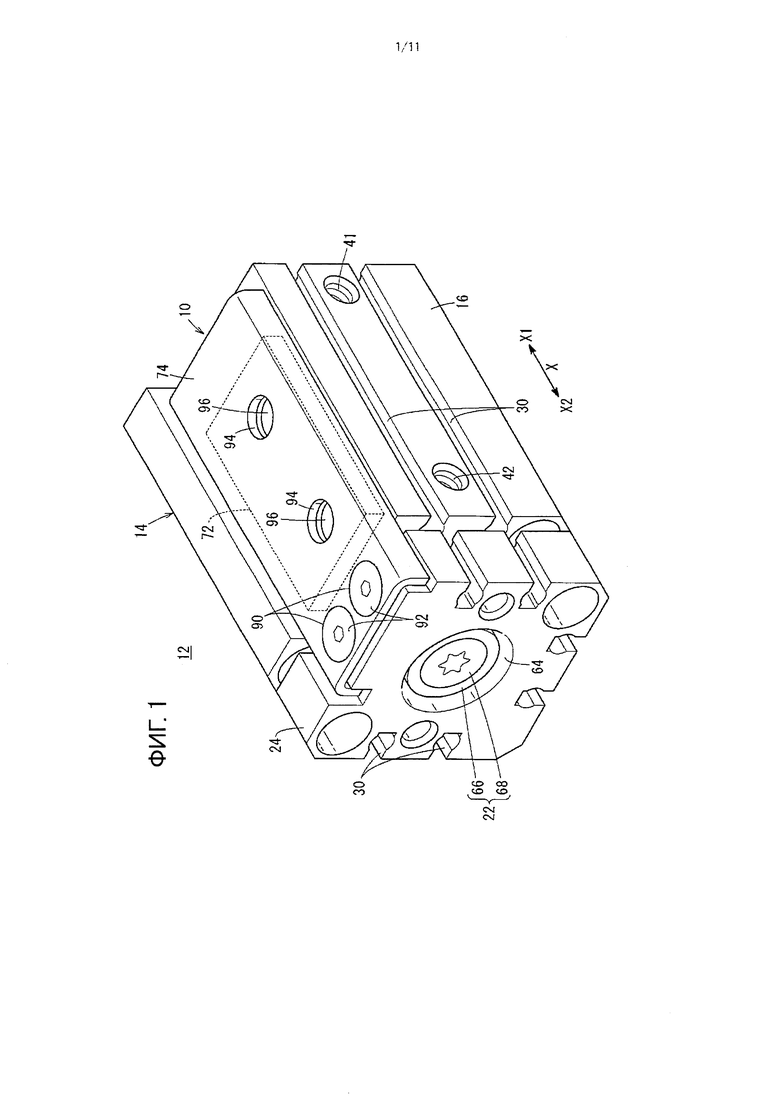
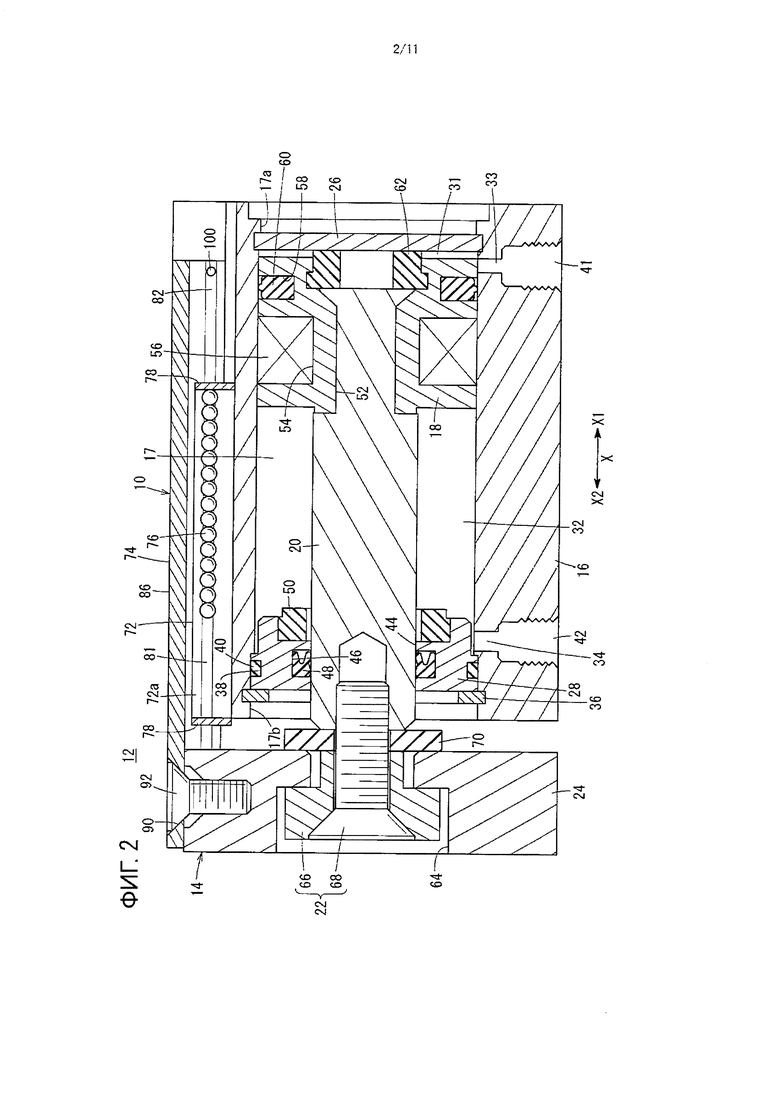
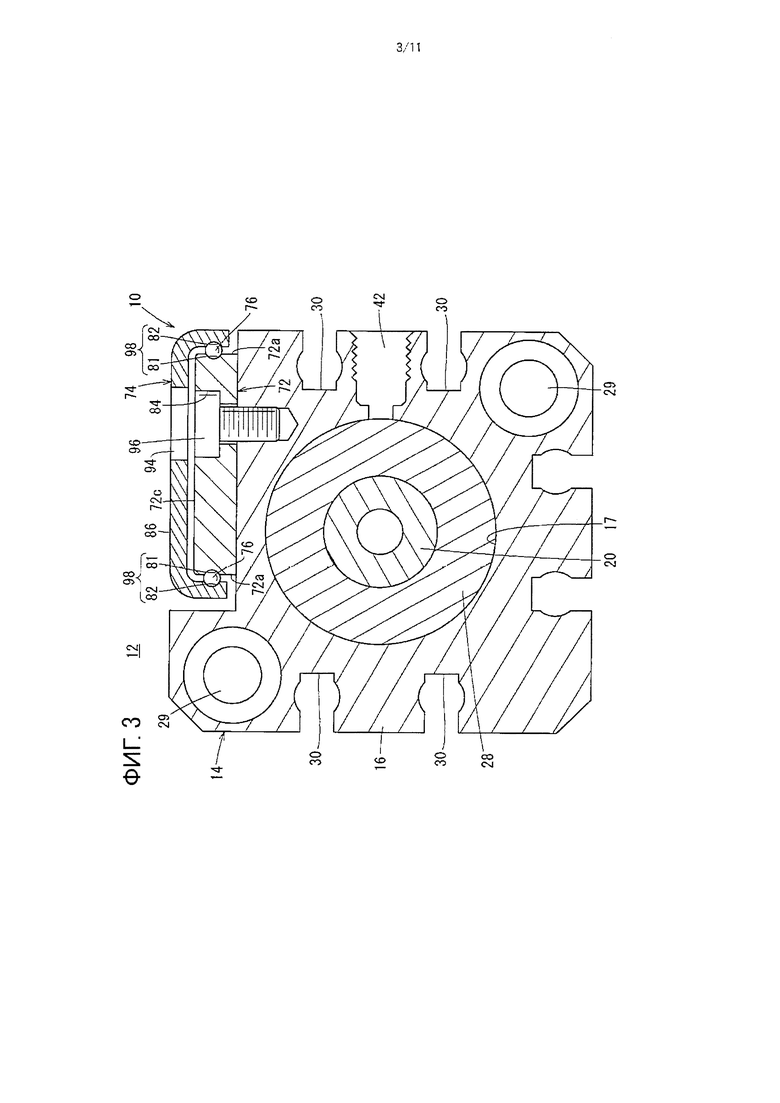
На фиг. 1 представлен вид в перспективе исполнительного механизма 12 для скольжения, снабженного направляющим механизмом 10 согласно первому примеру осуществления настоящего изобретения. На фиг. 2 - вертикальный разрез исполнительного механизма 12 для скольжения. На фиг. 3 - поперечный разрез исполнительного механизма 12 для скольжения;
Исполнительный механизм 12 для скольжения содержит корпус 14 исполнительного механизма и направляющий механизм 10, смонтированный на корпусе 14 исполнительного механизма. Исполнительный механизм 12 для скольжения используется, например, в качестве транспортного средства или средства транспортировки для обрабатываемой детали.
Как показано на фиг. 2, корпус 14 исполнительного механизма включает в себя корпус 16 цилиндра, в котором сформировано отверстие 17 цилиндра, поршень 18, размещенный с возможностью возвратно-поступательного скольжения в осевом направлении внутри отверстия 17 цилиндра, шток 20 поршня, соединенный с поршнем 18 на одном конце штока 20 поршня, и концевую пластину 24, соединенную со штоком 20 поршня через механизм 22 крепления снаружи корпуса 16 цилиндра.
Отверстия 17 цилиндра, сформированные в корпусе 16 цилиндра, проходят через корпус 16 цилиндра в осевом направлении (в направлении стрелки X на чертежах). На одном концевом участке отверстия 17 цилиндра (на концевом участки со стороны направления X1), например, смонтирована крышка 26 головки пластинчатой формы, обеспечивающая воздухонепроницаемость при закрытии одного концевого участка 17а отверстия 17 цилиндра.
На другом концевом участке отверстия 17 цилиндра (на концевом участке со стороны Х2 стрелки) смонтирована рассматриваемая ниже крышка 28 штока, обеспечивающая воздухонепроницаемость при закрытии другого концевого участка 17b отверстия 17 цилиндра. В отверстии 17 цилиндра между поршнем 18 и крышкой 26 головки сформирована первая камера 31 давления, а между поршнем 18 и крышкой 28 штока сформирована вторая камера 32 давления.
Как показано на фиг. 1 и 2, на одной боковой поверхности корпуса 16 цилиндра перпендикулярно осевому направлению корпуса 16 цилиндра сформированы первый порт 41 и второй порт 42, через которые осуществляется подача и выпуск текучей среды под давлением. Например, к первому порту 41 и ко второму порту 42 через трубопровод (непоказанный) или т.п. подсоединено устройство переключения каналов для прохождения текучей среды, которое переключает состояние подачи текучей среды под давлением. При этом за счет избирательной подачи текучей среды под давлением в первый порт 41 или во второй порт 42 поршень 18 и шток 20 поршня приводятся в движение в осевом направлении.
Как показано на фиг. 2, первый порт 41 сообщается с первой камерой 31 давления через первый соединительный канал 33, а второй порт 42 сообщается со второй камерой 32 давления через второй соединительный канал 34. Следовательно, текучая среда под давлением, поданная в первый порт 41, вводится через первый соединительный канал 33 в отверстие 17 цилиндра (в первую камеру 31 давления). Кроме того, текучая среда под давлением, поданная во второй порт 42, вводится через второй соединительный канал 34 в отверстие 17 цилиндра (во вторую камеру 32 давления).
Как показано на фиг. 1, на каждой из боковых поверхностей с обеих сторон корпуса 16 цилиндра сформированы канавки 30 для установки датчика, которые проходят вдоль осевого направления. В канавках 30 для установки датчика могут быть смонтированы магнитные датчики (непоказанные). При этом на фиг. 1 на каждой из боковых поверхностей корпуса 16 цилиндра сформированы по две канавки 30 для установки датчика, однако на каждой из боковых поверхностей может быть сформирована одна канавка 30 для установки датчика.
Как показано на фиг. 3, в корпусе 16 цилиндра выполнено множество крепежных отверстий 29 (в иллюстрируемом примере два), которые проходят в осевом направлении. В результате затягивания болтов (непоказанных), вставленных через крепежные отверстия 29, корпус 16 цилиндра прикрепляется к крепежному участку (непоказанному), за счет чего исполнительный механизм 12 для скольжения крепится на крепежном участке.
Крышка 28 штока, показанная на фиг. 2, представляет собой кольцеобразный элемент, который вставляется со стороны другого торцевого участка 17b цилиндра 17, и крепится внутри отверстия 17 цилиндра стопорным кольцом 36, входящим в зацепление с внутренней окружной поверхностью отверстия 17 цилиндра. На внешней окружной поверхности крышки 28 штока сформирована кольцевая канавка 38, и в этой кольцевой канавке 38 смонтировано уплотнительное кольцо 40. Это уплотнительное кольцо 40 предотвращает утечку текучей среды под давлением через зазор между крышкой 28 штока и корпусом 16 цилиндра (внутренней окружной поверхностью отверстия 17 цилиндра) наружу.
В центре крышки 28 штока сформировано отверстие 14 для штока, которое проходит в осевом направлении, и шток 20 поршня вставлен через отверстие 14 для штока. На внутренней окружной поверхности крышки 28 штока сформирована кольцевая канавка 46, и в этой кольцевой канавке 46 смонтирована кольцевая уплотнительная прокладка 48. Эта уплотнительная прокладка 48 предотвращает утечку текучей среды под давлением через зазор между крышкой 28 штока и штоком 20 поршня наружу.
Со стороны крышки 28 штока, обращенной к поршню 18 (со стороны второй камеры 32 давления), закреплен демпфер 50, служащий средством буферизации, выполненным в виде упругого элемента. Этот демпфер 50 облегчает или смягчает удары при столкновении между поршнем 18 и крышкой 28 штока во время движения поршня 18 вперед.
Поршень 18 представляет собой полый элемент, имеющий внутри отверстие 52 для штока. Со стороны одного своего конца шток 20 поршня 18 закреплен с применением подходящего крепежного средства, такого как запрессовка или болт или т.п. На внешнем окружном участке поршня 18 сформирована кольцевая канавка 54 для магнита, и в этой канавке 54 для магнита смонтирован магнит 56. Во время использования исполнительного механизма 12 для скольжения в результате обнаружения магнитного поля магнита 56 магнитными датчиками (непоказанными), прикрепленными к корпусу 16 цилиндра, может быть определено положение поршня 18 в осевом направлении.
Кроме того, на внешнем окружном участке поршня 18 сформирована кольцевая канавка 58, и в этой кольцевой канавке 58 смонтирована кольцевая уплотнительная прокладка 60. Эта кольцевая прокладка 60 предотвращает утечку текучей среды под давлением через зазор между поршнем 18 и корпусом 16 цилиндра (внутренней окружной поверхностью отверстия 17 цилиндра) наружу.
При этом, как показано на фиг. 2, в отдельных канавках (в канавке 54 для магнита и в кольцевой канавке 58), сформированных на расстоянии одна от другой в осевом направлении, смонтированы магнит 56 и уплотнительная прокладка 60. Однако магнит 56 и уплотнительная прокладка 60 могут быть сформированы как одно целое, и как одно целое магнит 56 и уплотнительная прокладка 60 могут быть смонтированы в общей канавке.
Со стороны поршня 18, обращенной к крышке 26 головки, закреплен демпфер 62, служащий средством буферизации, выполненным в виде упругого элемента Этот демпфер 62 облегчает или смягчает удары при столкновении между крышкой 26 головки и поршнем 18 во время движения поршня 18 назад.
Концевая пластина 24 закреплена на другом конце штока 20 поршня через механизм 22 крепления. На концевой пластине 24 выполнено ступенчатое отверстие 64, которое проходит в осевом направлении. Механизм 22 крепления включает в себя полый цилиндрический крепежный элемент 66, вставленный в отверстие 64, и болт 68, вставленный через крепежный элемент 66 и вкрученный в другой конец штока 20 поршня. Между крепежным элементом 66 и штоком 20 поршня вставлен разделительный элемент 70. Концевая пластина 24 в результате затягивания болта 68 зажимается между болтом 68 и разделительным элементом 70, за счет чего эта концевая пластина 24 крепится в вертикальном положении перпендикулярно относительно штока 20 поршня.
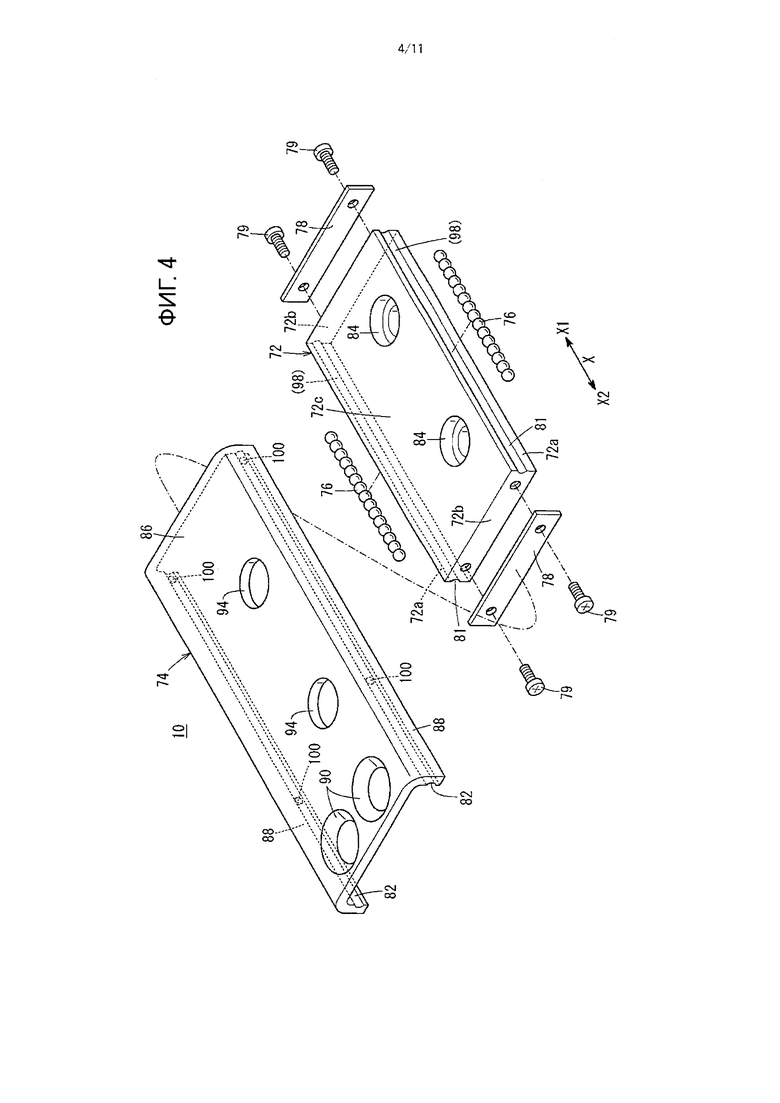
Ниже приводится описание направляющего механизма 10. На фиг. 4 представлен вид в перспективе направляющего механизма 10 в разобранном виде. Направляющий механизм 10 содержит направляющий элемент 72, прикрепленный к первому элементу, скользящий элемент 74, прикрепленный ко второму элементу, способному перемещаться относительно первого элемента, и множества тел 76 качения, которые размещены с возможностью качения между направляющим элементом 72 и скользящим элементом 74. В случае рассматриваемого варианта осуществления вышеупомянутый первый элемент представляет собой корпус 16 цилиндра, а вышеупомянутый второй элемент - концевую пластину 24.
Показанный направляющий элемент 72 проходит вдоль осевого направления (в направлении стрелки X) и представляет собой на виде сверху широкий, плоский и практически квадратный (прямоугольный) элемент. При этом направляющий элемент 72 может представлять собой удлиненный (длинный и узкий) элемент. Как показано на фиг. 2-4, на каждой из боковых поверхностей 72а направляющего элемента 72 с обеих сторон в направлении ширины этого элемента сформированы первые канавки 81, проходящие в виде прямых линий в осевом направлении. Показанные первые канавки 81 являются (дугообразными) канавками полукруглой формы. Оба конца первых канавок 81 в направлении их прохождения являются открытыми на обеих торцевых поверхностях 72b направляющего элемента 72 в продольном направлении (в направлении стрелки X) направляющего элемента 72.
На каждой из торцевых поверхностей 72b направляющего элемента 72 с помощью винтов 79 закреплены пластины 78 ограничителя, предназначенные для предотвращения разъединения тел 76 качения, то есть для предотвращения выпадения этих тел 76 качения из первых канавок 81. Каждая из пластин 78 ограничителя представляет собой пластинчатый элемент примерно такого же размера и такой же формы, что и каждая из торцевых поверхностей 72b направляющего элемента 72, и закрывает концевые участки первых канавок 81 с обеих сторон в направлении ширины направляющего элемента 72.
Как показано на фиг. 4, в направляющем элементе 72 на расстоянии одно от другого выполнено множество ступенчатых болтовых отверстия 84 (в иллюстрируемом примере два), которые проходят в направление толщины направляющего элемента 72. С помощью болтов 96, вставленных через болтовые отверстия 84 и вкрученных в корпус 16 цилиндра, направляющий элемент 72 закреплен на корпусе 16 цилиндра
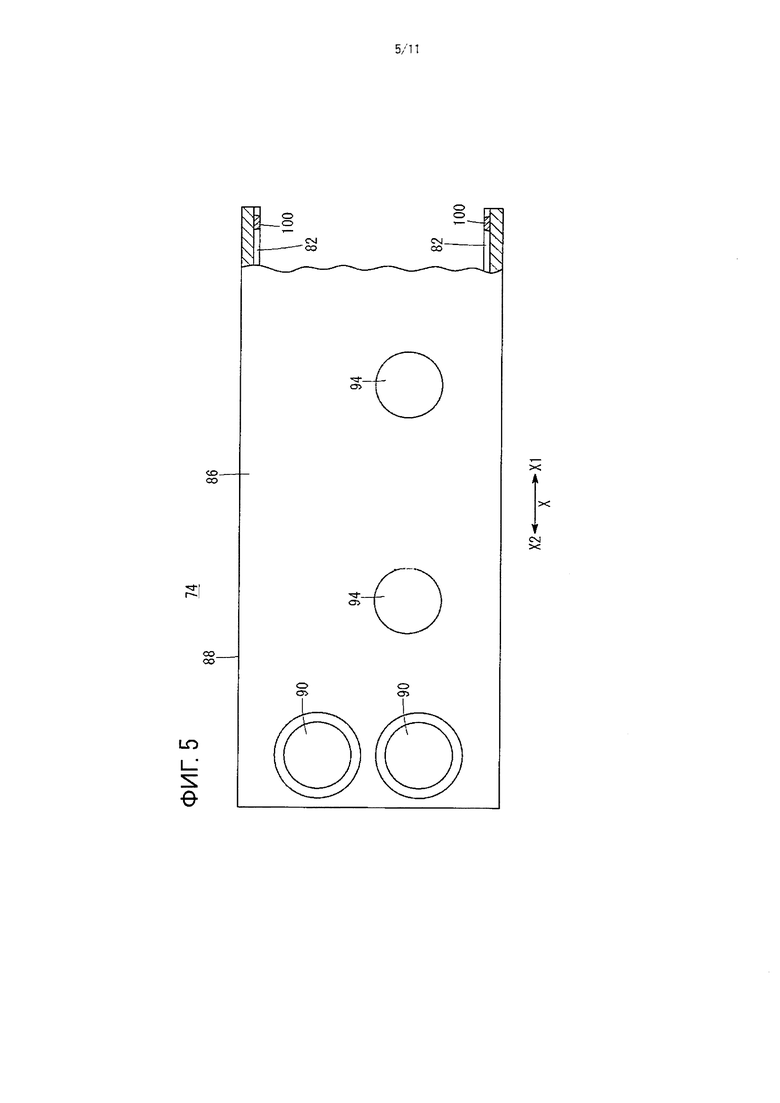
Показанный скользящий элемент 74 проходит вдоль осевого направления (в направлении стрелки X) и представляет собой на виде сверху практически прямоугольный широкий плоский элемент, способный скользить в осевом направлении относительно направляющего элемента 72. На скользящем элементе 74 выполнены вторые канавки 82, проходящие в виде прямых линий в осевом направлении и размещенные напротив первых канавок 81. Показанные вторые канавки 82 являются (дугообразными) канавками полукруглой формы. Оба конца вторых канавок 82 в направлении их прохождения являются открытыми на обеих торцевых поверхностях в продольном направлении (в направлении стрелки X) скользящего элемента 74.
В случае рассматриваемого варианта осуществления скользящий элемент 74 представляет собой элемент пластинчатой формы. В частности, скользящий элемент 74 включает в себя практически прямоугольное основание 86 плоской пластинчатой формы, обращенное к верхней поверхности 72 с направляющего элемента 72, и пару боковых секций 88, выступающих в направлении толщины основания 86 (в направлении вниз на фиг. 4) от обоих концевых участков основания 86 в направлении его ширины и проходящих параллельно одна другой в осевом направлении (в направлении стрелки X).
Каждая из боковых секций 88 обращена к соответствующей боковой поверхности 72а в направлении ширины направляющего элемента 72. Вышеупомянутые вторые канавки 82 размещены на соответствующих внутренних поверхностях пары боковых секций 88 (на внутренних поверхностях боковых секций 88, обращенных одна к другой). Вторые канавки 82 могут быть сформированы, например, в результате операции шлифования внутренних поверхностей боковых секций 88.
Скользящий элемент 74 выполнен из металлического материала. Для придания скользящему элементу 74 достаточной жесткости пластинчатый элемент в качестве заготовки скользящего элемента 74 может быть подвергнут изгибу, в результате которого этот пластинчатый элемент приобретает форму вышеупомянутого основания 86 с парой боковых секций 88, и последующей термической обработке (закалке). В качестве металлического материала, который может быть подвергнут такой закалке, может быть предложен, например, SUS440 стандарта JIS (Японского промышленного стандарта).
В непосредственной близости от концевого участка основания 86 со стороны направления Х2 выполнены отверстия 90, проходящие в направлении толщины основания 86. С помощью болтов 92, вставленных через отверстия 90 и вкрученных в концевую пластину 24, скользящий элемент 74 закреплен на концевой пластине в перпендикулярном направлении к этой пластине.
Как показано на фиг. 4, в основании 86 на таком же расстоянии одно от другого, что и болтовые отверстия 84 в направляющем элементе 72, выполнено множество отверстий 94 (в иллюстрируемом примере два), которые проходят в направление толщины. Размер отверстий 94 позволяет проходить через них болтам 96 (см. фиг. 3). В процессе сборки, когда направляющий механизм 10 крепится к корпусу 16 цилиндра, в состоянии, при котором направляющий элемент 72 и скользящий элемент 74 совмещены один с другим так, что множество болтовых отверстий 84 в направляющем элементе 72 и множество отверстий 94 в скользящем элементе 74 совпадают одни с другими, болты 96 могут быть вставлены через отверстия 94 в болтовые отверстия 84 и вкручены в эти болтовые отверстия 84. Скользящий элемент 74 может скользить относительно направляющего элемента 72, не задевая за головки болтов 96, вкрученных в болтовые отверстия 84.
Множество тел 76 качения размещено в направляющих канавках 98, образованных первыми канавками 81 и вторыми канавками 82. В случае рассматриваемого варианта осуществления направляющие канавки 98 размещены на обеих сторонах направляющего механизма 10 - на левой и правой сторонах. Когда скользящий элемент 74 скользит в осевом направлении (в направлении стрелки X) относительно направляющего элемента 72, относительное перемещение первых канавок 81 и вторых канавок 82 сопровождается качением тел 76 качения, которые размещены в направляющих канавках 98, и, таким образом, обеспечивается возможность плавного перемещения скользящего элемента 74 относительно направляющего элемента 72.
Тела 76 качения не ограничиваются тем, что имеют сферическую форму, как показано в иллюстрируемом примере, и могут иметь, например, цилиндрическую форму. В качестве конструкционного материала для тел 76 качения может быть предложена, например, нержавеющая сталь, углеродистая сталь или т.п.
Как показано на фиг. 4 и 5, во вторых канавках 82 в результате сварки закреплены ограничители 100, предназначенные для предотвращения разъединения тел 76 качения, то есть для предотвращения выпадения этих тел качения из направляющих канавок 98. В случае рассматриваемого варианта осуществления ограничители 100 размещены во вторых канавках 82 в положениях со стороны направления X1 от тел 76 качения, и в частности, размещены в непосредственной близости от концов вторых канавок 82 со стороны направления X1. В случае перемещения скользящего элемента 74 относительно направляющего элемента 72 в направлении Х2 в положение, когда направляющий элемент 72 выступает от концевого участка скользящего элемента 74 со стороны направления X1, при таком размещении ограничителей 100 тела 76 качения входят в зацепление с этими ограничителями 100 и блокируются ими и, таким образом, предотвращается выскакивание, то есть выскальзывание тел 76 качения из направляющих канавок 98.
В случае направляющего механизма 10 в исполнительном механизме 12 для скольжения направляющий элемент 72 не выступает от концевого участка скользящего элемента 74 со стороны направления Х2, и поэтому в положениях со стороны направления Х2 от тел 76 качения ограничители 100 можно не размещать. Однако в случае необходимости, например, при использовании конструкции, в которой направляющий элемент 72 выступает от концевого участка скользящего элемента 74 со стороны направления Х2, ограничители 100 могут быть размещены во вторых канавках 82 в положениях со стороны направлении Х2 от тел 76 качения, например, как показано на фиг. 4, в средних положениях вторых канавок 82 (то есть в положениях со стороны направления X1 от концов вторых канавок 82 со стороны направления Х2).
Ниже приводится описание способа сварки ограничителей 100 как одного из этапов способа изготовления направляющего механизма 10.
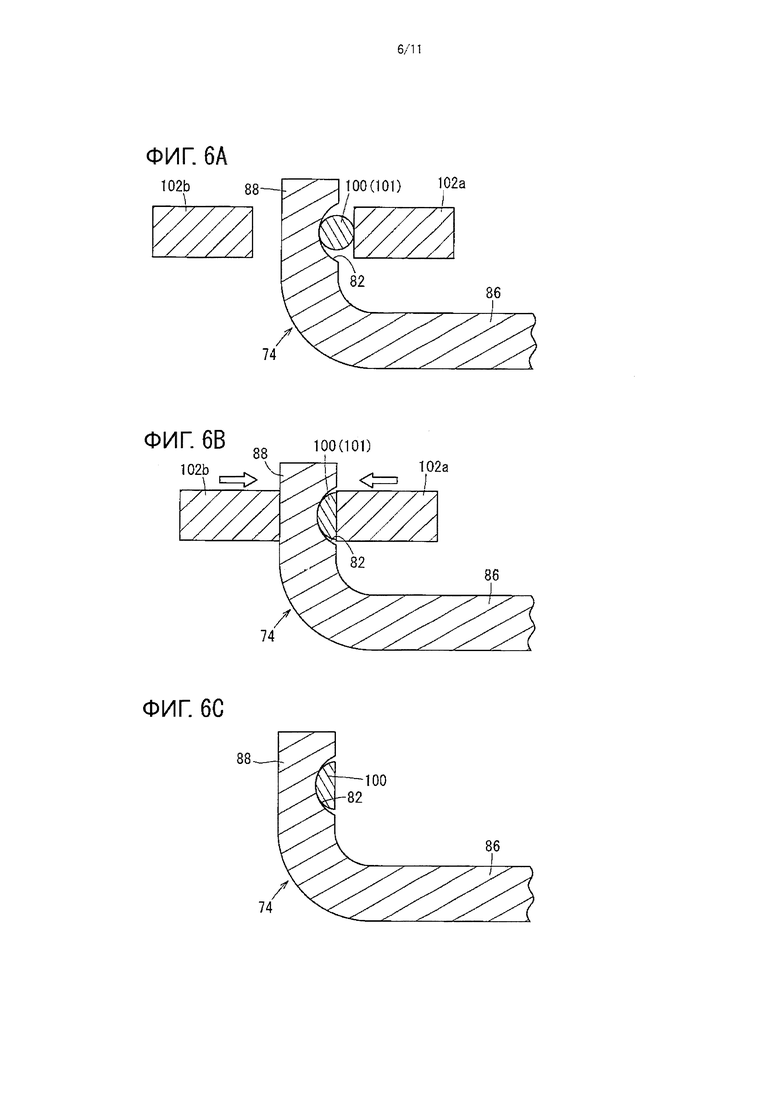
Как показано на фиг. 6А, до сварки ограничитель 100 (заготовка 101 ограничителя) может иметь сферическую форму. В случае сферической формы подача заготовки 101 ограничителя осуществляется совершенно беспрепятственно. В другом варианте изобретения форма заготовки 101 ограничителя может быть линейной, такой как у проволоки, или цилиндрической (как у ролика). Заготовка 101 ограничителя выполнена из металлического материала и в предпочтительном варианте, например, из SUS304 стандарта JIS (Японского промышленного стандарта), так как позволяет избежать появления трещин после сварки.
После того, как скользящий элемент 74 и заготовка 101 ограничителя, которым была придана заданная форма, были подготовлены, затем, как показано на фиг. 6А, заготовку 101 ограничителя размещают в заданном положении во второй канавке 82.
Далее, как показано на фиг. 6В, скользящий элемент 74 (его боковую секцию 88) и заготовку 101 ограничителя зажимают между двумя установленными один против другого электродами 102а, 102b, к этим электродам прикладывают давление и в течение заданного времени через них пропускают электрический ток или подают на них напряжение. При этом пропускание электрического тока сопровождается выделением джоулева тепла в заготовке 101 ограничителя, вследствие чего происходит размягчение и плавление заготовки 101 ограничителя. При этом под действием давления со стороны электродов 102а заготовка 101 ограничителя деформируется. Как показано на фиг. 6В, боковая поверхность заготовки 101 ограничителя становится плоской и выравнивается с внутренней поверхностью боковой секции 88.
После прекращения пропускания электрического тока заготовка 101 ограничителя затвердевает, в результате чего получают ограничитель 100, приваренный, как показано на фиг. 6С, во второй канавке 82.
Направляющий механизм 10 и способ его изготовления согласно рассматриваемому варианту осуществления настоящего изобретения в основном соответствуют описанию, приведенному выше. Далее рассмотрим процесс работы и действие этого направляющего механизма.
Согласно направляющему механизму 10, конструкция которого соответствует описанию, приведенному выше, и способу его изготовления ограничители 100 прикреплены в результате сварки, а не с помощью винтов. Поэтому на этапе прикрепления ограничителей 100 нет никакой необходимости в выполнении операции нарезания резьбы для формирования резьбовых отверстий в элементе, на котором закреплены ограничители 100 (в рассматриваемом варианте осуществления в скользящем элементе 74), и операция вкручивания винтов также не нужна. В результате число этапов обработки и этапов сборки, необходимых для создания конструкции для предотвращения выпадения тел 76 качения из направляющих канавок 98, может быть сокращено.
В частности, в случае рассматриваемого варианта осуществления скользящий элемент 74 представляет собой тонкий пластинчатый элемент, а ограничители 100 размещены во второй канавке 82. В случае, когда скользящий элемент 74 состоит из тонкого элемента (например, из элемента пластинчатой формы с толщиной, составляющей порядка от 1 мм или менее до нескольких мм), выполнение операции нарезания резьбы является затруднительным или невозможным. Однако конструкция, в которой крепление ограничителей 100 осуществляется в результате сварки, позволяет использовать тонкий скользящий элемент 74.
Так как в случае рассматриваемого варианта осуществления вторые канавки 82 сформированы в результате операции шлифования, то при этой операции шлифования происходит удаление оксидного слоя, образующегося во время термической обработки (закалки) скользящего элемента 74. Поэтому во время сварки ограничителей 100 может быть получена стабильная прочность сварки.
Кроме того, при способе изготовления направляющего механизма 10 согласно рассматриваемому варианту осуществления ограничители 100 присоединяют в результате сварки сопротивлением, и поэтому операция прикрепления ограничителя 100 ко вторым канавкам 82 может быть выполнена эффективно. В частности, на этапе сварки в состоянии, при котором направляющий элемент 74 и ограничитель 100 зажаты между электродами 102а, 102b и к этим электродам приложено давление, через них пропускают электрический ток. Поэтому операция прикрепления ограничителей 100 в результате сварки может быть выполнена эффективно.
Как показано на фиг. 6С, когда боковые поверхности ограничителей 100 является плоскими и практически выравниваются с внутренними поверхностями боковых секций 88, ограничители 100 не задевают за направляющий элемент 72, и скольжение скользящего элемента 74 относительно направляющего элемента 72 никогда не нарушается ограничителями 100. При этом до тех пор, пока ограничители 100 не задевают за направляющий элемент 72, ограничители 100 могут немного выступать от вторых канавок 82.
Операция шлифования для формирования вторых канавок 82 в боковых секциях 88 скользящего элемента 74 может быть осуществлена после термической обработки (закалки) скользящего элемента 74. При выполнении этой операции шлифования происходит удаление оксидного слоя, образующегося во время термической обработки, и поэтому на участках присоединения ограничителей 100 может быть получена стабильная прочность присоединения.
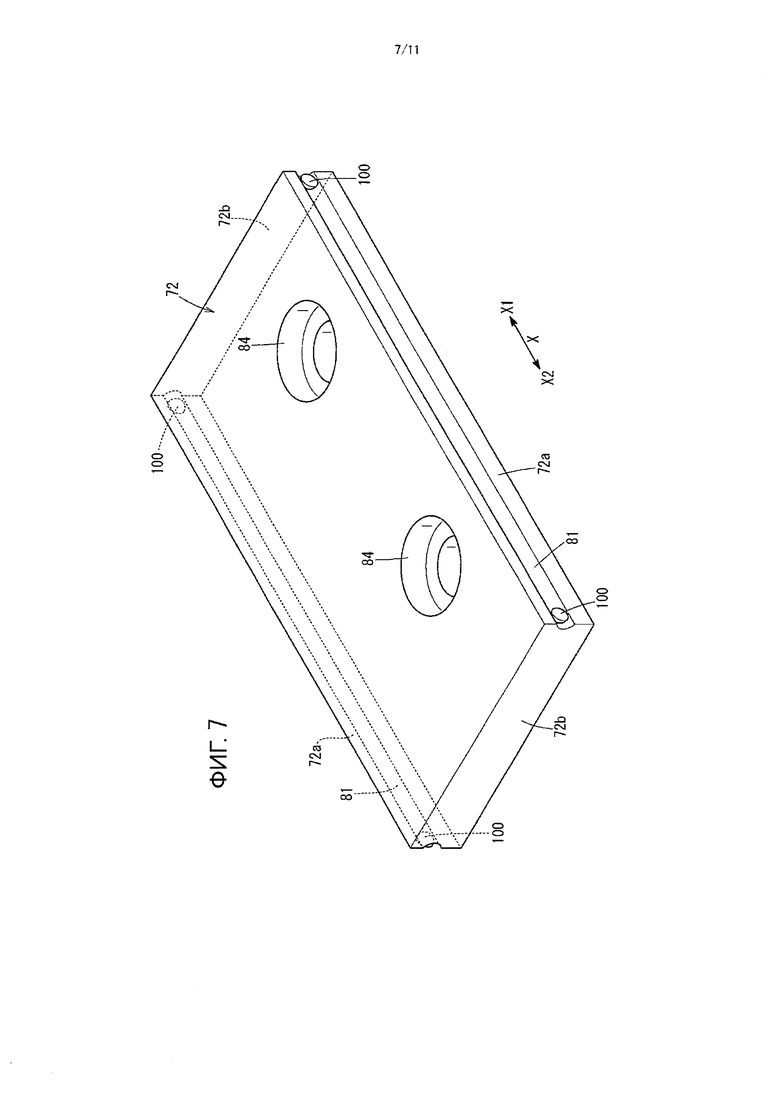
В рассмотренном выше варианте осуществления ограничители 100 приварены ко вторым канавкам 82 на боковых секциях 88 скользящего элемента 74. Однако, как показано на фиг. 7, ограничители 100 могут быть также приварены к первым канавкам 81 на направляющем элементе 72. В частности, вместо пластин 78 ограничителя, которые прикреплены к направляющему элементу 72 с помощью винтов (см. фиг. 4), на обоих концах первых канавок 81 в направлении их прохождения могут быть приварены ограничители 100. В этом случае ограничители 100, приваренные в первых канавках 81, так же, как и ограничители 100, приваренные во вторых канавках 82, могут быть приварены в первых канавках 81 в результате сварки сопротивлением с использованием электродов 102а, 102b (см. фиг. 6А-6С).
При использовании такой конструкции, в которой ограничители 100 приварены в первых канавках 81, операции нарезания резьбы и вкручивания винтов для закрепления пластин 78 ограничителя относительно направляющего элемента 72 становятся ненужными. В результате число этапов обработки и этапов сборки, необходимых для создания конструкции для предотвращения выпадения тел 76 качения из направляющих канавок 98, может быть сокращено.
При этом в случае, когда толщина скользящего элемента 74 позволяет осуществлять операцию резьбы совершенно беспрепятственно, вместо приваривания ограничителей 100 во вторых канавках 82, на торцевой поверхности скользящего элемента 74 с помощью винтов может быть закреплен другой ограничительный элемент для предотвращения выпадения тел 76 качения, а ограничители 100 могут быть размещены в результате сварки только в первых канавках 81. Этот случай также позволяет сократить число этапов обработки и сборки, необходимых для создания конструкции для предотвращения выпадения тел 76 качения из направляющих канавок 98.
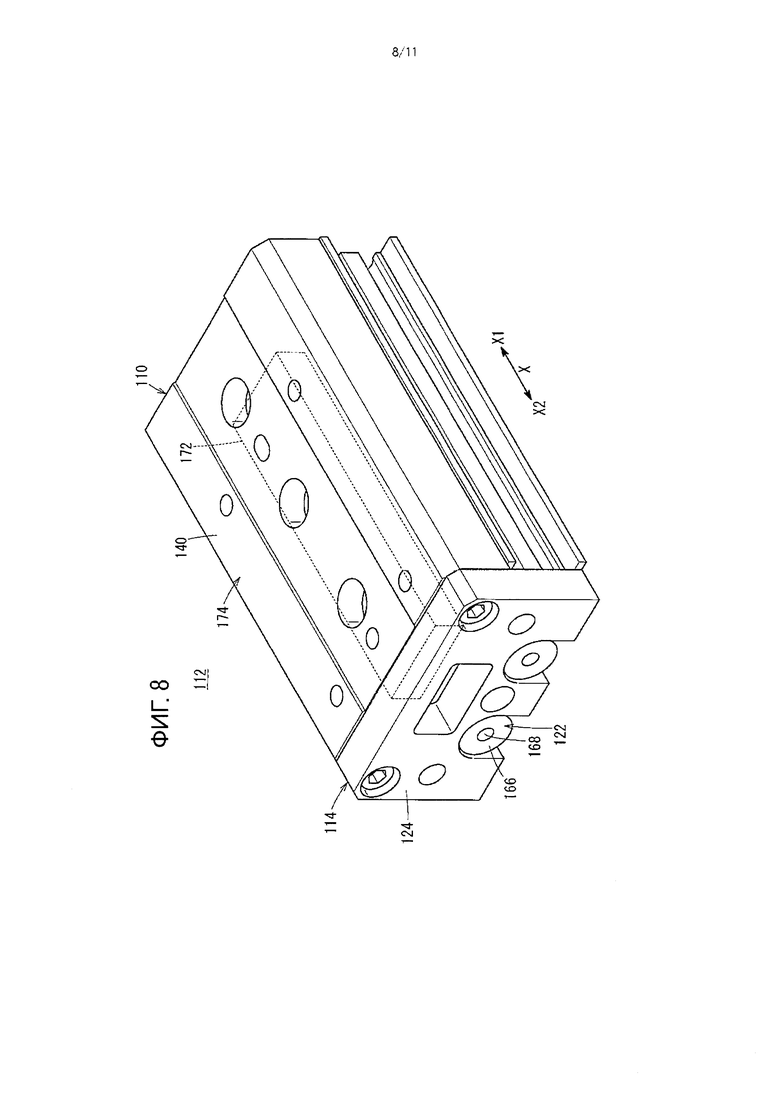
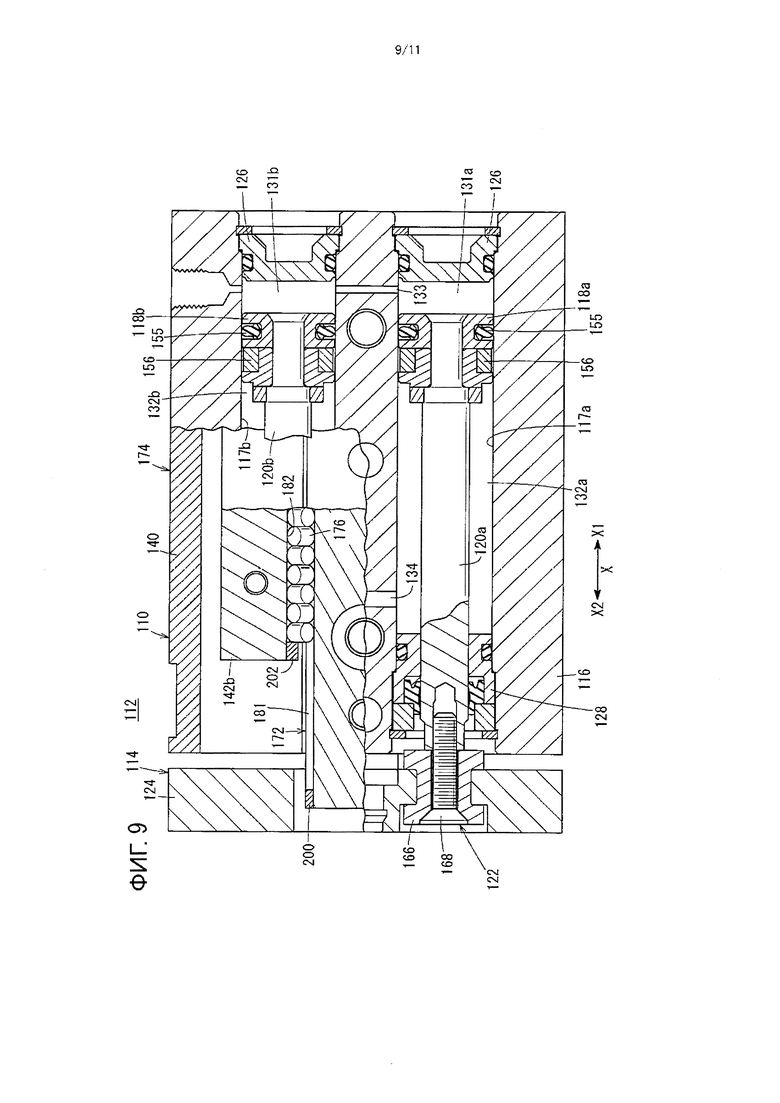
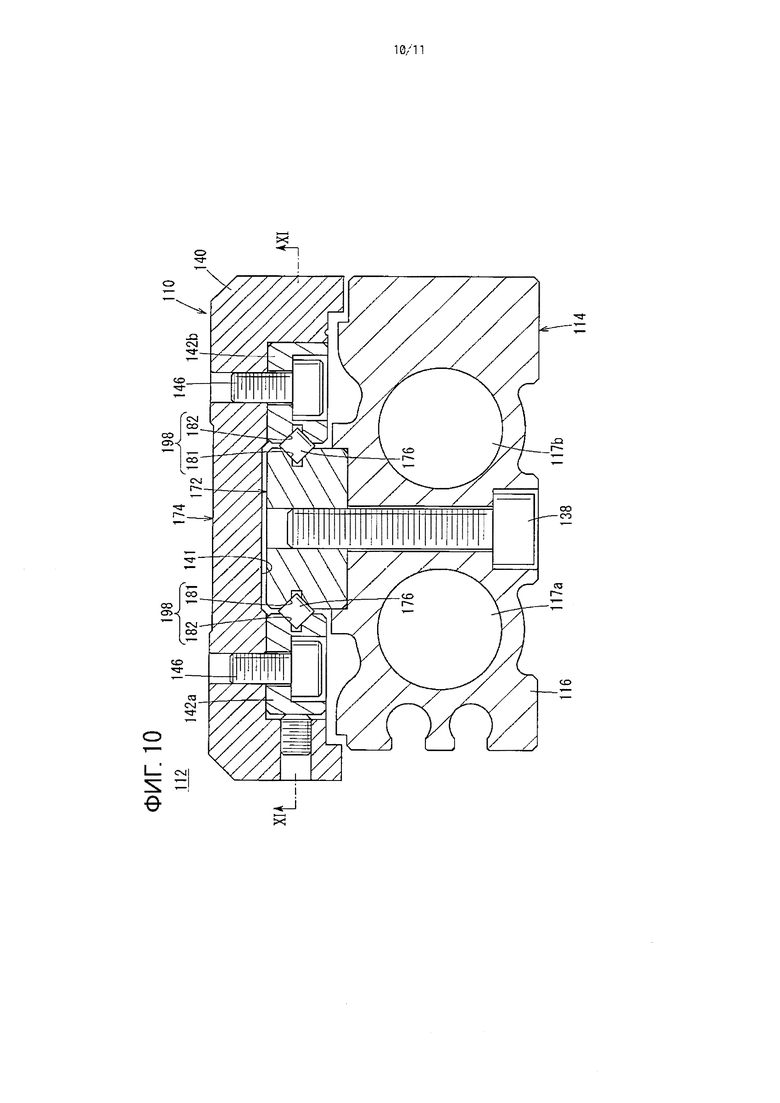
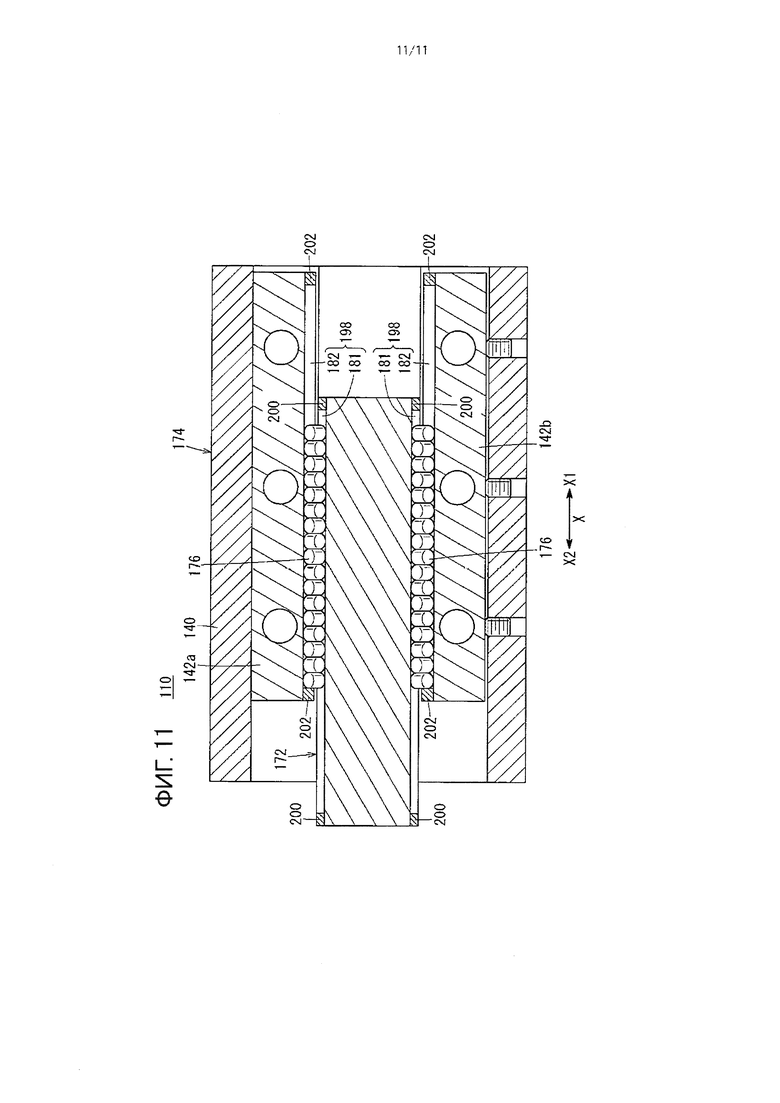
На фиг. 8 представлен вид в перспективе исполнительного механизма 112 для скольжения, снабженного направляющим 110 механизмом согласно второму примеру осуществления настоящего изобретения. На фиг. 9 - вертикальный разрез исполнительного механизма 112 для скольжения. На фиг. 10 - поперечный разрез исполнительного механизма 112 для скольжения. На фиг. 11 - разрез исполнительного механизма, показанного на фиг. 10, по XI-XI.
Исполнительный механизм 112 для скольжения содержит корпус 114 исполнительного механизма и направляющий механизм 110, смонтированный на корпусе 114 исполнительного механизма. Исполнительный механизм 112 для скольжения используется, например, в качестве транспортного средства или средства транспортировки для обрабатываемой детали.
Как показано на фиг. 9, корпус 114 исполнительного механизма включает в себя корпус 116 цилиндра, в котором сформировано два взаимно параллельных отверстия 117а, 117b цилиндра, два поршня 118а, 118b, которые размещены с возможностью скольжения одного относительно другого в осевом направлении внутри отверстий 117а, 117b цилиндра, два штока 120а, 120b поршня, соединенных соответственно с поршнями 118а, 118b на одном конце, и концевую пластину 124, соединенную со штоками 120а, 120b поршня через механизм 122 крепления снаружи корпуса 116 цилиндра
Отверстия 117а, 117b, цилиндра, сформированные в корпусе 116 цилиндра, проходят через корпус 116 цилиндра в осевом направлении (в направлении стрелки X на чертежах). На каждом из одних концевых участков отверстий 117а, 117b цилиндра (на концевых участках со стороны направления X1) смонтирована крышка 126 головки пластинчатой формы, обеспечивающая воздухонепроницаемость при закрытии концевых участков отверстий 117а, 117b цилиндра
На других концевых участках отверстия отверстий 117а, 117b цилиндра (на концевых участках со стороны направления Х2) смонтированы крышки 128а, 128b штока, обеспечивающие воздухонепроницаемость при закрытии других концевых участков отверстий 117а, 117b цилиндра. В отверстиях 117а, 117b цилиндра между поршнями 118а, 118b и крышками 126а, 126b головки сформированы первые камеры 131а, 131b давления, а между поршнями 118а, 118b и крышками 128а, 128b штока сформированы вторые камера 132а, 132b давления.
Две первые камеры 131а, 131b давления сообщаются одна с другой через соединительный канал 133, сформированный в корпусе 116 цилиндра. Две вторые камеры 132а, 132b сообщаются одна с другой через соединительный канал 134, сформированный в корпусе 116 цилиндра. За счет избирательной подачи текучей среды под давлением в первые камеры 131а, 131b давления или во вторые камеры 132а, 132b давления два поршня 118а, 118b и два штока 120а, 120b поршня приводятся в движение в осевом направлении.
Поршни 118а, 118b представляют собой полые элементы. Со стороны своих одних концов штоки 120а, 120b поршней закреплены с применением подходящего крепежного средства, такого как запрессовка или болт или т.п.На внешних окружных участках поршней 118а, 118b смонтированы уплотнительные прокладки 155 и магниты 156.
Концевая пластина 124 закреплена на других концах штоков 120а, 120b поршня через механизм 122 крепления, имеющий полый цилиндрический крепежный элемент 166 и болты 168, вставленные через крепежный элемент 166 и вкрученные в другие концы штоков 120а, 120b поршня.
Ниже приводится описание направляющего механизма 110. Направляющий механизм 110 содержит направляющий элемент 172, прикрепленный к первому элементу, скользящий элемент 174, прикрепленный ко второму элементу, способному перемещаться относительно первого элемента, и множества тел 176 качения, которые размещены с возможностью качения между направляющим элементом 172 и скользящим элементом 174. В случае рассматриваемого варианта осуществления вышеупомянутый первый элемент представляет собой корпус 116 цилиндра, а вышеупомянутый второй элемент - концевую пластину 124.
Показанный направляющий элемент 172 проходит вдоль осевого направления (в направлении стрелки X) и представляет собой на виде сверху широкий, плоский и практически квадратный (прямоугольный) элемент. При этом направляющий элемент 172 может представлять собой удлиненный (длинный и узкий) элемент. В случае рассматриваемого варианта осуществления направляющий элемент 172 закреплен на корпусе 116 цилиндра с помощью болтов 138 (см. фиг. 10).
На каждой из боковых поверхностей направляющего элемента 172 с обеих сторон в направлении ширины выполнены первые канавки 181 V-образной формы, проходящие в виде прямых линий в осевом направлении. Оба конца первых канавок 181 в направлении их прохождения являются открытыми на обеих торцевых поверхностях в продольном направлении (в направлении стрелки X) направляющего элемента 172.
Показанный скользящий элемент 174 проходит вдоль осевого направления (в направлении стрелки X) и представляет собой на виде сверху практически прямоугольный широкий плоский
элемент, способный скользить в осевом направлении относительно направляющего элемента 172. В случае рассматриваемого варианта осуществления скользящий элемент 174 включает в себя подвижный стол 140, закрепленный на концевой пластине 124, и пару параллельных одна другой скользящих направляющих 142а, 142b, прикрепленных к подвижному столу 140.
С внутренней стороны подвижный стол 140 имеет секцию 141 с выточкой (см. фиг. 10) и пару направляющих 142а, 142b, закрепленных на секции 141 с выточкой с помощью болтов 146. На каждой из скользящих направляющих 142а, 142b выполнены канавки 182 V-образной формы, проходящие в виде прямых линий в осевом направлении, обращенные к первым канавкам 181, выполненным на направляющем элементе 172. Оба конца вторых канавок 182 в направлении их прохождения являются открытыми на обеих торцевых поверхностей в продольном направлении (в направлении стрелки X) скользящего элемента 174.
Множество тел 176 качения размещены в областях квадратной формы, образованных первыми канавками 181 и вторыми канавками 182 (в направляющих канавках 198). В случае рассматриваемого варианта осуществления направляющие канавка 198 размещены на обеих левых и правых сторонах направляющего механизма 110, а каждое из тел 176 качения имеет цилиндрическую форму. В левой и правой направляющих канавках 198 множества тел 176 качения размещены с наклоном в 90° одно относительно другого.
Как показано на фиг. 11, в первых канавках 181, выполненных в направляющем элементе 172, в результате сварки закреплены ограничители 200, предназначенные для предотвращения разъединения тел 176 качения, то есть для предотвращения выпадения этих тел качения из направляющих канавок 198. В случае рассматриваемого варианта осуществления ограничители 200 размещены в первых канавках 181 в положениях со стороны направления X1 от тел 176 качения и в положениях со стороны направления Х2 от этих тел качения. В частности, ограничители 200 размещены в непосредственной близости от обоих противоположных концов первых канавок 181. Такое размещение ограничителей 200 предотвращает выскакивание, то есть выскальзывание тел 176 качения из первых канавок 181.
Во вторых канавках 182, выполненных в скользящих направляющих 142а, 142b, в результате сварки закреплены ограничители 202, предназначенные для предотвращения разъединения тел 176 качения, то есть для предотвращения выпадения этих тел качения из направляющих канавок 198. В случае рассматриваемого варианта осуществления ограничители 202 размещены во вторых канавках 182 в положениях со стороны направления X1 от тел 176 качения и в положениях со стороны направлении Х2 от этих тел качения. В частности, ограничители 202 размещены в непосредственной близости от обоих противоположных концов вторых канавок 182. Такое размещение ограничителей 202 предотвращает выскакивание, то есть выскальзывание тел 176 качения из вторых канавок 182.
Ограничители 200, 202 могут быть приварены к направляющему элементу 172 и к скользящим направляющим 142а, 142b с использованием такого же способа сварки, что и ограничители 100 (см. фиг. 6А-6С).
Как было указано выше, в направляющем механизме 110 согласно рассматриваемому варианту осуществления, ограничители 200, 202 прикрепляют в результате сварки, а не с помощью винтов. Поэтому процесс работы и действие этого механизма могут быть такими же, что и у направляющего механизма 10 согласно первому варианту осуществления. В частности, на этапе прикрепления ограничителей 200, 202 нет никакой необходимости в выполнении операции нарезания резьбы для формирования резьбовых отверстий в элементе, на котором закреплены ограничители 200, 202 (в рассматриваемом варианте осуществления в скользящем элементе 174 и в скользящих направляющих 142а, 142b), и операция вкручивания винтов также не нужна. В результате число этапов обработки и этапов сборки, необходимых для создания конструкции для предотвращения выпадения тел 176 качения из направляющих канавок 198, может быть сокращено.
Выше были описаны предпочтительные варианты осуществления настоящего изобретения, однако настоящее изобретение не ограничивается этими вариантами осуществления, и, само собой разумеется, что в изобретение могут быть внесены различные изменения и дополнения, не выходящие за пределы объема изобретения, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный исполнительный механизм | 2014 |
|
RU2651354C2 |
| ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2580979C9 |
| Направляющий механизм для цилиндра и цилиндр с направляющим механизмом | 2015 |
|
RU2679292C2 |
| СОЕДИНИТЕЛЬНАЯ КОНСТРУКЦИЯ ВАЛА И ГИДРО(ПНЕВМО)УСТРОЙСТВО | 2018 |
|
RU2731197C1 |
| Направляющий блок для исполнительного механизма | 2015 |
|
RU2670644C9 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 2007 |
|
RU2420388C2 |
| ОБРАБАТЫВАЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2712459C1 |
| ГИДРО(ПНЕВМО)УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ ПОРШНЕВОГО УЗЛА | 2017 |
|
RU2722581C1 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ДАВЛЕНИЯ | 2018 |
|
RU2736237C1 |
| ПОРШНЕВОЙ УЗЕЛ И ГИДРО(ПНЕВМО)УСТРОЙСТВО | 2017 |
|
RU2737877C1 |
Изобретение относится к направляющему механизму и способу его изготовления. Направляющий механизм (10) содержит направляющий элемент (72), имеющий первую канавку прямолинейной формы (81), скользящий элемент (74), выполненный с возможностью прямолинейного скольжения относительно направляющего элемента (72) и имеющий вторую канавку прямолинейной формы (82), размещенную напротив первой канавки (81), и множество тел (76) качения, размещенных в направляющей канавке (98), образованной первой канавкой (81) и второй канавкой (82). Во второй канавке (82) в результате сварки закреплен ограничитель (100), предотвращающий выпадение тел качения (76) из направляющей канавки (98). Скользящий элемент (74) представляет собой элемент пластинчатой формы и включает в себя основание плоской пластинчатой формы (86) и боковые секции (88), выступающие в направлении толщины основания (86) от обоих концевых участков основания (86) в направлении его ширины. На каждой из внутренних стенок боковых секций (88) предусмотрена вторая канавка (82). Технический результат: создание направляющего механизма и способа его изготовления, при котором в направляющем механизме, снабженном конструкцией для предотвращения выпадения тел качения из направляющей канавки, можно сократить число этапов обработки и сборки этого механизма. 2 н. и 2 з.п. ф-лы, 13 ил.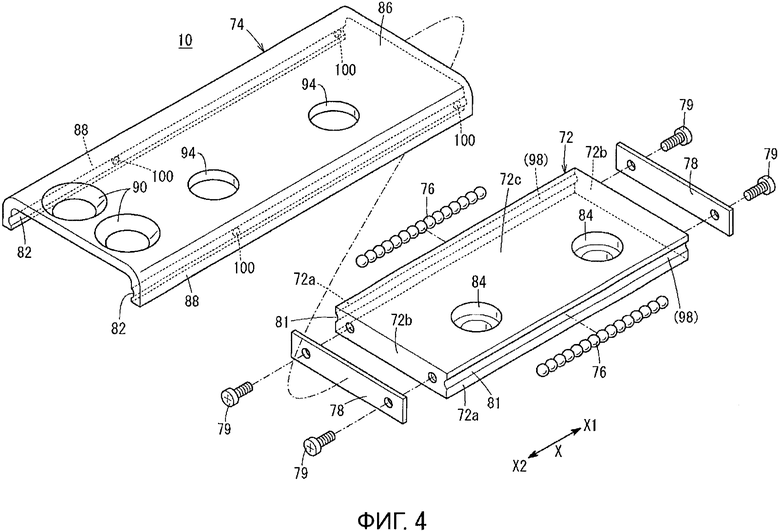
1. Направляющий механизм (10, 110), содержащий:
направляющий элемент (72, 172), имеющий первую канавку прямолинейной формы (81, 181);
скользящий элемент (74, 174), выполненный с возможностью прямолинейного скольжения относительно направляющего элемента (72, 172) и имеющий вторую канавку прямолинейной формы (82, 182), размещенную напротив первой канавки (81, 181); и
множество тел (76, 176) качения, размещенных в направляющей канавке (98, 198), образованной первой канавкой (81, 181) и второй канавкой (82, 182);
причем во второй канавке (82, 182) в результате сварки закреплен ограничитель (100, 200, 202), предотвращающий выпадение тел качения (76, 176) из направляющей канавки (98, 198),
скользящий элемент (74) представляет собой элемент пластинчатой формы и включает в себя основание плоской пластинчатой формы (86) и боковые секции (88), выступающие в направлении толщины основания (86) от обоих концевых участков основания (86) в направлении его ширины, и
на каждой из внутренних стенок боковых секций (88) предусмотрена вторая канавка (82).
2. Способ изготовления направляющего механизма (10, 110), являющегося способом изготовления направляющего механизма (10, 110), содержащего:
направляющий элемент (72, 172), имеющий первую канавку прямолинейной формы (81, 181);
скользящий элемент (74, 174), выполненный с возможностью прямолинейного скольжения относительно направляющего элемента (72, 172) и имеющий вторую канавку прямолинейной формы (82, 182), размещенную напротив первой канавки (81, 181); и
множество тел (76, 176) качения, размещенных в направляющей канавке (98, 198), образованной первой канавкой (81, 181) и второй канавкой (82, 182);
заключается в том, что этот способ содержит этап сварки, на котором к первой канавке (81, 181) или ко второй канавке (82, 182) в результате сварки сопротивлением присоединяют ограничитель (100, 200, 202), причем в состоянии, при котором ограничитель (100, 200, 202) приведен в состояние прижатия к первой канавке (81, 181) или ко второй канавке (82, 182).
3. Способ изготовления направляющего механизма (10, 110) по п. 2, отличающийся тем, что на этапе сварки в состоянии, при котором направляющий элемент (72, 172) или скользящий элемент (74, 174) и ограничитель (100, 200, 202) зажаты между электродами (102а, 102b) и к этим электродам приложено давление, через них пропускают электрический ток.
4. Способ изготовления направляющего механизма (10, 110) по п. 2, отличающийся тем, что на этапе сварки присоединяют ограничитель (100, 200, 202), имеющий сферическую форму.
| JP S5822516 U, 12.02.1983 | |||
| WO 2013002064 A1, 03.01.2013 | |||
| JP 2008128436 A, 05.06.2008 | |||
| Шариковая направляющая качения | 1987 |
|
SU1530852A1 |

