Область техники
Изобретение относится к области космической техники и может быть использовано для очистки космического пространства от группы объектов крупногабаритного космического мусора (ОККМ) типа разгонных блоков, последних ступеней ракет-носителей, нефункционирующих космических аппаратов, каждый из которых имеет в своем составе сопло маршевого ракетного двигателя, путем размещения в нем тормозного двигательного комплекса и может быть использовано в тех областях, где необходимо изменить параметры орбиты группы космических объектов, которые имеют в своем составе элементы конструкции, за которые они могут быть захвачены с минимальными рисками разрушения объектов.
Уровень техники
Известно, что в результате запусков космических аппаратов (КА), как правило, образуются массивные объекты крупногабаритного космического мусора (ОККМ), к которым относятся последние ступени ракет-носителей, разгонные блоки. Анализ каталогов космических объектов [Satellite Catalog. [Интернет ресурс]: http://www.celestrak.com/satcat/search.asp (дата обращения 21.11.2018)] показывает, что в настоящее время сформировались выраженные компактные группы ОККМ. Особенностью указанных ОККМ является осевая симметрия конструктивно-компоновочной схемы и наличие сопла маршевого ракетного двигателя, за которое они могут быть захвачены без риска разрушения ОККМ и образования новых объектов космического мусора.
Известна система, устройство и способ удаления орбитального мусора (патентная заявка США US 2014/0107865 А1) в котором устройство представляет собой автономный КА, в состав бортового оборудования которого входят элементы конструкции, двигательная установка, системы электропитания и терморегулирования, стыковочный узел, а также блок управления для наведения и сближения с целью, идентификации параметров ее вращения и выполнения стыковки к соплу ОККМ. После выполнения стыковки с соплом данный КА выдает тормозной импульс и переводит КА на орбиту захоронения. Для утилизации группы ОККМ несколько независимых и индивидуально управляемых устройств выводятся на орбиту в виде кластера одной ракетой-носителем. Недостатком данного способа является низкая экономичность, поскольку каждое устройство действует автономно и содержит полный набор бортового оборудования, что увеличивает стоимость и массу системы, предназначенной для удаления группы ОККМ.
Известны экономичные с точки зрения затрат характеристической скорости схемы облета нескольких объектов крупногабаритного космического мусора [Гришко Д.А. Исследование схем облета объектов крупногабаритного космического мусора на низких орбитах: дисс. … канд. техн. наук, МГТУ им. Н.Э. Баумана, Москва, 2018. 123 с.], которые позволяют снизить затраты характеристической скорости на сведение с орбиты группы ОККМ при их последовательном облете одним КА.
Известен проект космического комплекса (КК), для облета группы из 19 ОККМ (проект VASIMR® Space Tug Low Earth Orbit Space Cleaner фирмы Ad Astra Rocket Company представленный на сайте URL:http://www.adastrarocket.com/aarc/debris (дата обращения 01.12.2018) и описанный в электронном документе adastrarocket.com/infograpriics/VASIMR-Orbital-Cleaner.pdf (дата обращения 01.12.2018)), состоящего из базового КА (БКА) - многоцелевого космического буксира, оснащенного электроракетной двигательной установкой, системой электропитания, использующей панели солнечных батарей, а также системой управления и другими вспомогательными бортовыми системами, необходимыми для встречи и сближения с ОККМ на сервисной орбите высотой около 800 км и последующей транспортировки ОККМ на парковочную орбиту высотой 400 км, негерметичным контейнером для хранения тормозных двигательных модулей (ТДМ) по 5 групп из 4 ТДМ, расположенных в окружном направлении, узлом для стыковки с сервисным модулем (СМ) и манипулятором для перемещения и стыковки ТДМ с СМ; двадцати ТДМ, оснащенных узлом для стыковки с соплом ОККМ, узлом для стыковки с СМ и двигательной установкой с РДТТ, которые закрепляются в сопле ОККМ и используются для выдачи тормозного импульса для увода ОККМ в атмосферу Земли после отстыковки от БКА на парковочной орбите; одного (СМ), оснащенного узлом для стыковки с БКА, узлом для стыковки с ТДК, двигательной установкой с ЖРД, системой управления и другими вспомогательными бортовыми системами, необходимыми для отстыковки от БКА на сервисной орбите, автономного сближения с ОККМ, установки ТДК в сопле ОККМ, стабилизации ОККМ с ТДК и транспортировки связки СМ-ТДК-ОККМ к БКА и стыковки связки с БКА на сервисной орбите. Недостатками данного проекта является длительное время перелетов КК, оснащенного двигателями малой тяги, между сервисной и парковочной орбитами; наличием в составе комплекса трех различных двигательных установок с ЭРД, ЖРД и РДТТ, что снижает надежность системы; наличия служебного модуля, выполняющего две сложных операции стыковки с ОККМ и с БКА, что также снижает надежность системы и увеличивает массу элементов конструкции и бортового оборудования КК; нерациональное размещение ТДМ на борту БКА, приводящее к сильному изменению центровки по мере выполнения целевой задачи и уменьшения количества ТДМ на борту БКА. Изменение центровки усложняет процесс управления КК, что приводит к повышенному расходу топлива.
Наиболее близким техническим решением является проект модульного КК для удаления группы ОККМ (Loesch М., Bruin F., Castronuovo М., Covello F., Geary J., Hyde S., Jung W., Longo F., Martinez-Fernandez M., Mason S., Springborn K., Wagenbach S., Kreisel J. Economic Approach for Active Space Debris Removal Services // Proceedings of International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2010) Sapporo, Japan, August 29 - September 1,2010 [Электронный ресурс] URL: http://robotics.estec.esa.int/i-SAIRAS/isairas2010/PAPERS/079-2759-p.pdf#[0,{%22name%22%22FitV%22},434.741 (Дата обращения 01.12.2018)) состоящий из БКА и нескольких ТДМ. БКА состоит из трех модулей: двигательного модуля, модуля полезной нагрузки и центрального модуля. Модуль полезной нагрузки, жестко соединенный с двигательным модулем пристыкован к центральному модулю при помощи стыковочного узла. При этом модуль полезной нагрузки находится между двигательным модулем и центральным модулем. Центральный модуль построен на базе универсальной космической платформы, имеющей конструкцию в виде куба с ребром 1,5 м. В состав модуля входят необходимые для осуществления полета, наведения и сближения с ОККМ бортовые системы: электропитания, терморегулирования, управления движением (включая силовые двигатели-маховики), передачи данных по радиоканалу. Дополнительно центральный модуль оснащен двумя оппозитно расположенными стыковочными узлами, стыковочным многозвенным манипулятором, монтажным многозвенным манипулятором и системой технического зрения, расположенными на гранях параллелепипеда, свободных от стыковочных узлов. Модуль полезной нагрузки, имеющий конструкцию в виде цилиндра диаметром 1,7 м и длиной 1,0 м, состоит из двух секций, в каждой из которых по окружности равномерно размещается 5 агрегатов для крепления ТДМ. Модуль полезной нагрузки оснащается стыковочным узлом и узлом крепления к двигательному модулю. Двигательный модуль, имеющей конструкцию в виде параллелепипеда с размерами с ребром 1,5×1.5×1.5 м, содержит системы хранения и подачи топлива, ракетные двигатели для управления движением центра масс КА и движением КА относительно центра масс, закрепленные на поверхности корпуса панели солнечных батарей, узел для захвата модуля стыковочным манипулятором, узел крепления к модулю полезной нагрузки. ТДМ содержит узел для стыковки с соплом ОККМ, агрегат для стыковки с модулем полезной нагрузки БКА, двигательную установку на базе ЖРД для выдачи тормозного импульса ОККМ.
Комплекс утилизирует группу ОККМ следующим образом: БКА с размещенными на нем ТДМ осуществляет при помощи двигательного модуля маневры дальнего и ближнего наведения, а также сближение с выбранным ОККМ до дистанции порядка 10 м; стыковочный манипулятор захватывает ОККМ, размещает и удерживает его относительно БКА в зоне досягаемости монтажного манипулятора (при этом видеокамеры системы технического зрения, установленные на монтажном манипуляторе контролируют данный процесс); при помощи монтажного манипулятора ТДМ извлекается из модуля полезной нагрузки и устанавливается в сопло ОККМ; ТДМ стыкуется с соплом ОККМ; монтажный манипулятор дополнительно фиксирует ОККМ устраняя погрешности центровки связки БКА - ТДМ - ОККМ; связка БКА - ТДМ - ОККМ ориентируется при помощи системы управления БКА для выдачи тормозного импульса ОККМ; производится расстыковка и увод БКА от связки ТДМ - ОККМ; ТДМ выдает тормозной импульс и связка ТДМ - ОККМ сводится с орбиты в атмосферу Земли, где сгорает; БКА при помощи двигательного модуля осуществляет перелет к следующему объекту ОККМ в группе.
Центральный модуль данного КК является многоразовым. После израсходования всех ТДМ в модуле полезной нагрузки и запасов топлива в двигательном модуле осуществляется дооснащение КК новым комплектом данных модулей, который доставляется специализированным космическим буксиром и крепится к свободному стыковочному узлу центрального модуля при помощи стыковочного манипулятора. После этого космический буксир перестыковывается к отработанному комплекту и утилизирует его, сводя его с орбиты в атмосферу Земли.
Недостатком данного устройства является нерациональная компоновка космического комплекса, которая заключается в том, что:
1. По мере расходования топлива в двигательном модуле и перемещения ТДМ из модуля полезной нагрузки в ОККМ существенно изменяется центровка КК (центр масс БКА может уходить с продольной оси симметрии), что требует компенсации с использованием монтажного манипулятора и использования сложных алгоритмов системы управления, что снижает надежность системы.
2. Захват ОККМ за точку, удаленную от сопла ОККМ, стыковочным манипулятором, установленным на боковой поверхности центрального модуля вдали от оси симметрии КК, возможен только в ограниченном диапазоне малых угловых скоростей вращения ОККМ из-за значительных эксцентриситетов сил реакций связей; захват ОККМ манипулятором может сопровождаться значительными динамическими нагрузками и возмущающими моментами, которые необходимо парировать системой управления КК, что приводит к увеличению расхода рабочего тела и электроэнергии, а, следовательно, и массы КК.
3. Установка ТДМ в сопло ОККМ требует использования монтажного манипулятора, что увеличивает массу изделия;
4. Установка ТДМ монтажным манипулятором в сопло ОККМ, удерживаемого стыковочным манипулятором, требует высокой точности, обеспечение которой затруднено малой жесткостью конструкции манипуляторов, вызванной большим удлинением их звеньев, необходимым для увеличения зоны досягаемости. Увеличение жесткости манипуляторов требует увеличения их массы.
Раскрытие изобретения
Задачей и техническим результатом изобретения является упрощение конструктивно-компоновочной схемы КК, обеспечение заданного положения центра масс на всех этапах полета, снижение массы БКА, упрощение алгоритмов системы управления и ограничение уровня нагрузок, возникающих при захвате ОККМ.
Технический результат достигается за счет того, что для утилизации группы ОККМ предложен КК с осесимметричной конструктивно-компоновочной схемой, состоящий из БКА и сборки из нескольких ТДМ, расположенных соосно продольной оси КК.
Космический комплекс для утилизации группы объектов космического мусора, содержит базовый космический аппарат, состоящий из двигательного модуля и присоединенных к нему соосно продольной строительной оси модуля полезной нагрузки и агрегатного отсека, и как минимум один тормозной двигательный модуль, размещенный в отсеке полезной нагрузки. При этом модуль полезной нагрузки выполнен в виде тонкостенного цилиндрического контейнера с одним днищем, которое жестко соединено с двигательным модулем. Внутри контейнера на днище закреплен в транспортном положении вдоль продольной оси контейнера многозвенный стыковочный манипулятор, имеющий связанные приводами минимум два звена, причем как минимум одно телескопическое раздвижное звено и снабженный агрегатом стыковки для захвата объекта космического мусора за область критического сечения сопла маршевой двигательной установки. На внутренней поверхности контейнера установлены направляющие, по которым поступательно вдоль оси контейнера может перемещаться оснащенная приводом каретка, с установленными на ней узлами сцепки с тормозным двигательным модулем, имеющим кольцевую конструктивно-компоновочную схему с корпусом, имеющим центральное отверстие, и с равномерным распределением по окружности корпуса минимум четырех ракетных двигателей, баков с компонентами топлива, баллонов наддува, блоков бортового комплекса управления, агрегатов стыковки к краю сопла маршевой двигательной установки, и узлов сцепки с другими тормозными двигательными модулями и подвижной кареткой при их расположении коаксиально продольной оси модуля полезной нагрузки так, что манипулятор с зазором проходит сквозь центральные отверстия модулей, и поступательном перемещении вдоль этой оси для установки в сопло объекта комического мусора и обеспечения центровки комплекса. На внешней поверхности контейнера установлена панель солнечных батарей, датчики, антенно-фидерные устройства, двигатели стабилизации и ориентации. Агрегатный модуль, имеет кольцевую конструктивно-компоновочную схему и расположен соосно с модулем полезной нагрузки на расстоянии от днища контейнера, выбранном из условия заданной центровки комплекса.
В качестве двигательного модуля может быть использована модификация существующего разгонного блока.
На каретке 15 могут быть дополнительно предусмотрены агрегаты стыковки к объекту космического мусора за край сопла маршевой двигательной установки.
На открытом краю контейнера модуля полезной нагрузки могут быть дополнительно установлены минимум четыре телескопических амортизатора с приводами и агрегатами захвата первого (ближайшего к днищу контейнера) звена манипулятора или силового элемента конструкции объекта космического мусора.
Снижение массы БКА происходит вследствие того, что БКА снабжен только одним многозвенным манипулятором, одно или несколько звеньев которого выполнены телескопическими, установленным соосно продольной оси КК и снабженным устройством захвата сопла ОККМ, что позволяет упростить схему стыковки, увеличить диапазон допустимых угловых скоростей вращения ОККМ и ограничить уровень нагрузок при захвате ОККМ. После захвата и стабилизации, связки КК - ОККМ манипулятором производится выравнивание осей сопла и продольной оси ОККМ и стягивание ОККМ с КК таким образом, чтобы установка ТДМ в сопло ОККМ производилась путем поступательного перемещения ТДМ в направлении общей оси связки. Упрощение алгоритмов системы управления при переориентации связки ОККМ-КК, достигается за счет наличия общей оси симметрии связки, совпадающей с осью сопла ОККМ и направлением вектора тяги ТДМ. Заданное положение центра масс КК на всех этапах полета обеспечивается перемещением оставшихся ТДМ вдоль продольной оси КК.
Перечень чертежей
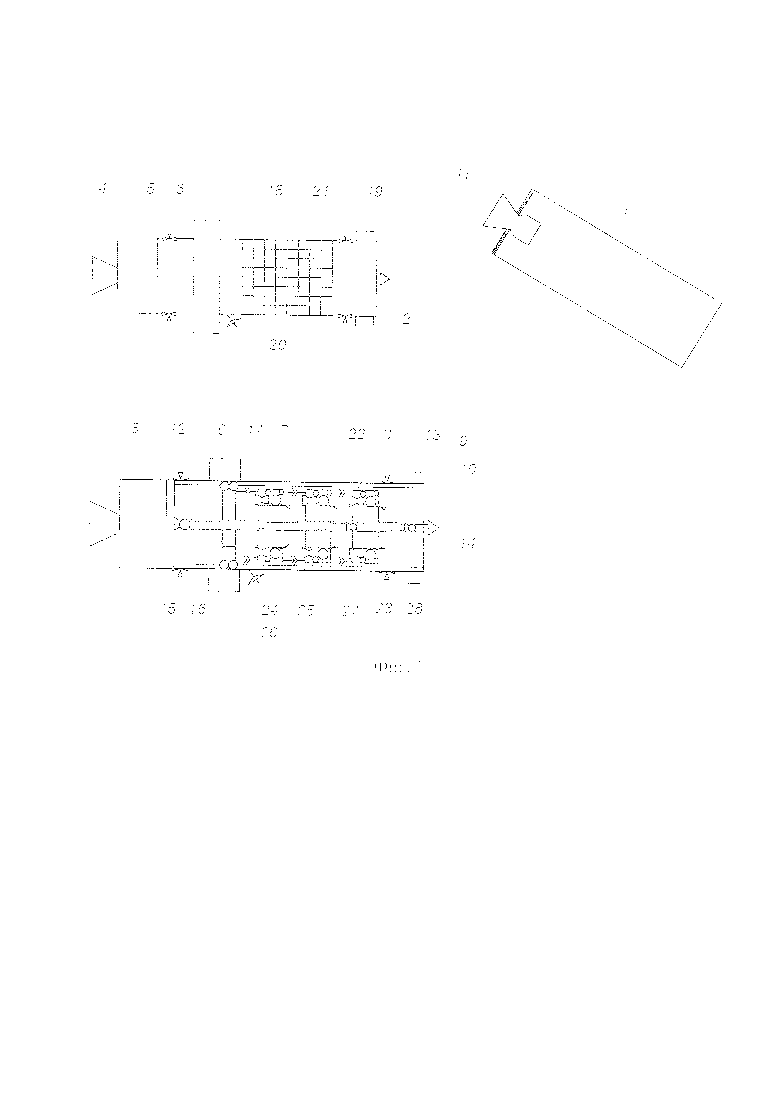
На фиг. 1 представлен общий вид конструктивно-компоновочной схемы КК.
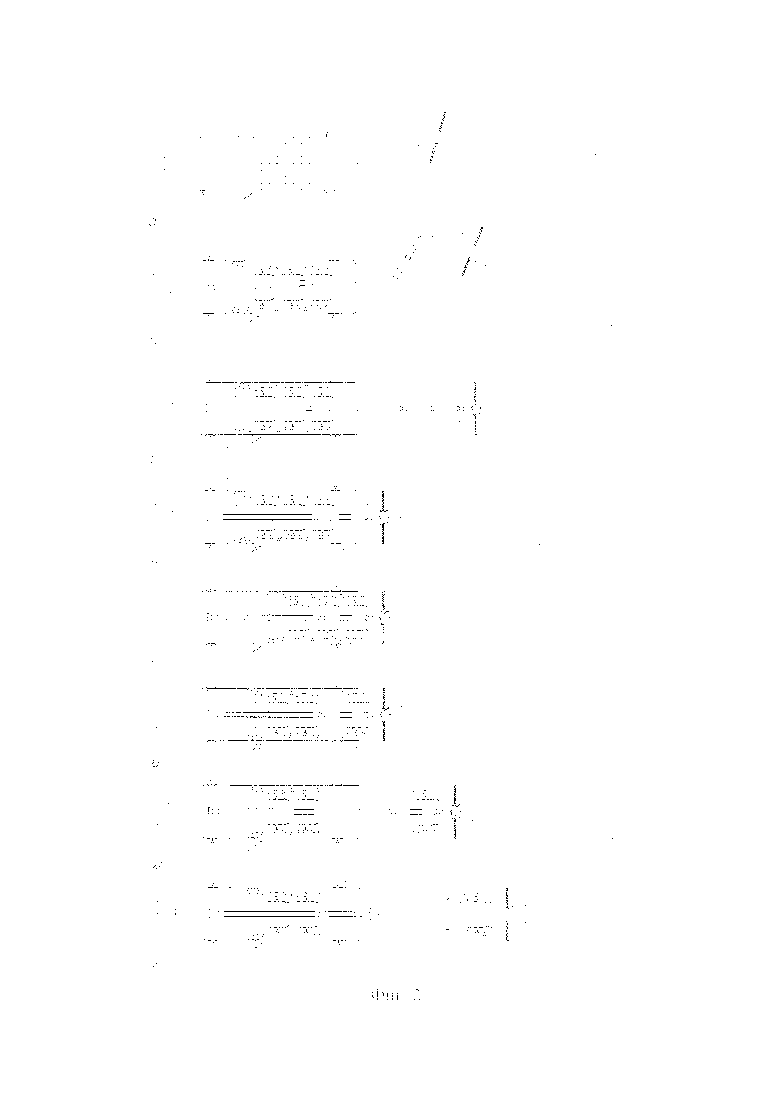
На фиг. 2 показаны стадии процесса функционирования КК.
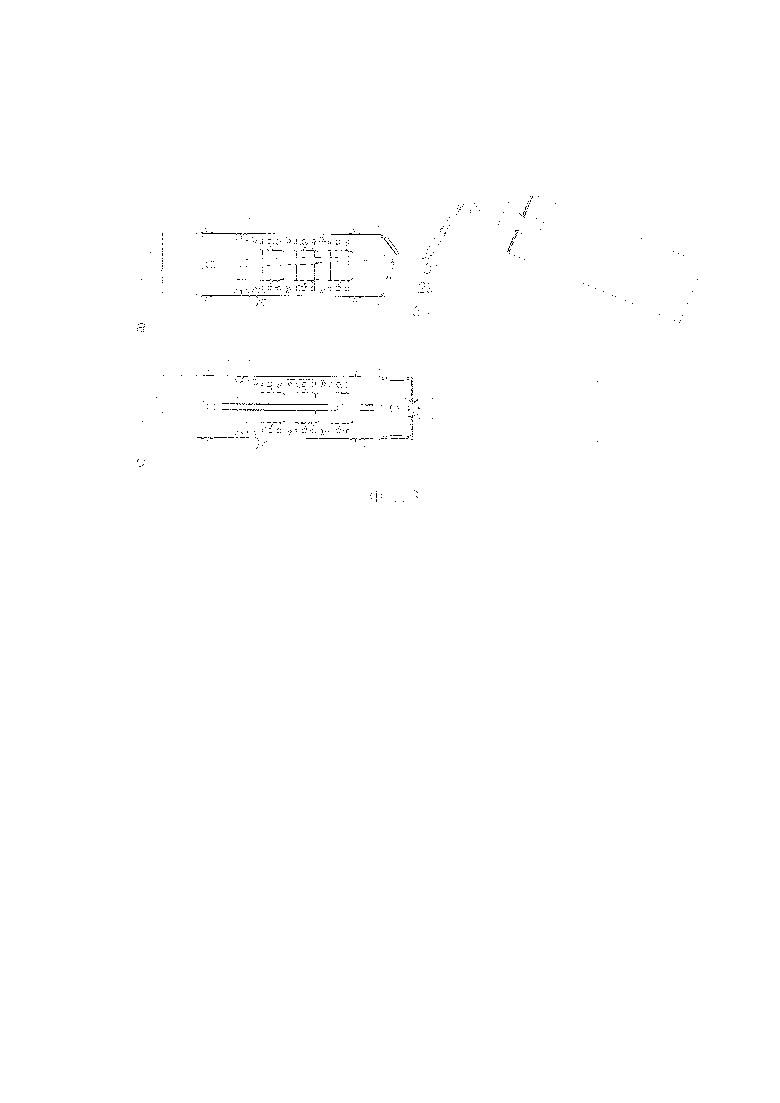
На фиг. 3 представлен вариант конструктивно-компоновочной схемы с дополнительной системой амортизации.
Осуществление изобретения
Космический комплекс (фиг. 1) для утилизации группы ОККМ 1 состоит из БКА 2 и размещенных в нем нескольких ТДМ 3. БКА состоит из расположенных соосно двигательного модуля 4, модуля полезной нагрузки 5 и агрегатного модуля 6.
Двигательный модуль 4 представляет собой разгонный блок, оснащенный необходимыми бортовыми системами, запасами компонентов топлива для многократного включения двигательной установки для осуществления дальнего и ближнего наведения на ОККМ в группе. В качестве двигательного модуля может быть использована модификация существующего разгонного блока.
Модуль полезной нагрузки 5 выполнен в виде тонкостенного цилиндрического контейнера 7 с одним днищем 8, которое жестко соединено с двигательным модулем 4. Внутри контейнера 7 на днище 8 модуля полезной нагрузки закреплен стыковочный манипулятор 9, который в транспортном положении расположен вдоль продольной оси контейнера 7. Манипулятор, снабженный агрегатом стыковки 10 для захвата ОККМ 1 за область критического сечения сопла маршевой двигательной установки И, является многозвенным, имеющим минимум два звена 12, причем как минимум одно -телескопическое звено 13, что позволяет перемещать узел захвата к открытому торцу контейнера 7. На внутренней поверхности контейнера 7 установлены направляющие 14 по которым поступательно вдоль оси контейнера может перемещаться каретка 15, оснащенная приводом 16 с установленными на ней узлами сцепки 17. На внешней поверхности контейнера 7 установлена панель солнечных батарей 18, необходимые для сближения и захвата ОККМ датчики и системы 19, антенно-фидерные устройства 20, а также двигатели стабилизации и ориентации 21.
Агрегатный модуль 6, оснащенный бортовым оборудованием систем электропитания, терморегулирования, управления движением, антенно-фидерными системами и прочими системами необходимыми для обеспечения работы БКА, имеет кольцевую конструктивно-компоновочную схему и расположен соосно с модулем полезной нагрузки на расстоянии от днища 8, выбранном из условия заданной центровки КК.
ТДМ 3 имеет кольцевую конструктивно-компоновочную схему с корпусом 22, имеющим центральное отверстие 23 и равномерным распределением по окружности корпуса четного числа (минимум четырех) ЖРД 24, баков 25 с компонентами топлива, баллонов наддува 26, и блоков бортового комплекса управления 27, что обеспечивает расположение центра масс ТДМ на его продольной оси.
На корпусе 22 ТДМ также установлены агрегаты стыковки 28 к ОККМ 1 за край сопла маршевой двигательной установки 11, сцепки 17 с помощью которых несколько ТДМ объединяются в сборку и крепятся на подвижной каретке 15. Положение каретки определяется числом закрепленных на ней ТДМ и требованиями заданного положения центра масс КК. При этом манипулятор 9 может перемещаться в пределах полости, образованной отверстиями 23 сборки ТДМ.
КК функционирует следующим образом (фиг. 2). С использованием двигательного модуля 4 осуществляются маневры перелета между ОККМ в соответствии с заданной баллистической схемой, ближнее наведение и зависание вблизи ОККМ 1 в зоне досягаемости манипулятора 9 (фиг. 2а). После определения параметров движения ОККМ вокруг центра масс при помощи датчиков 19 манипулятор 9 приводится в рабочее положение, для чего его телескопические звенья 13 удлиняются и производится захват ОККМ 1 манипулятором 9 при помощи агрегата стыковки 10 за область критического сечения сопла маршевой двигательной установки 11 (фиг. 2б). Далее при помощи приводов манипулятора 9 и органов управления БКА 21 осуществляется стабилизация связки КК-ОККМ, причем в процессе этой операции совмещаются продольные оси ОККМ 1 и БКА 2. После стабилизации и выравнивания осей (фиг. 2в) производится стягивание ОККМ и БКА за счет сокращения длины телескопических звеньев 13 манипулятора 9 (фиг. 2г). После стягивания каретка 15 по направляющим 14 перемещается поступательно, выдвигая сборку ТДМ таким образом, чтобы крайний ТДМ 3 был установлен в сопло 11 маршевой двигательной установки ОККМ, причем управляемые перемещения манипулятора 9 и каретки 15, контролируемые датчиками 19, обеспечивают необходимую точность установки ТДМ (фиг. 2д). После установки ТДМ фиксируется на краю сопла 11 агрегатами стыковки 28. Зафиксированный в сопле маршевой двигательной установки ОККМ ТДМ освобождается от связей со сборкой ТДМ путем расфиксации сцепок 17. Перемещением каретки 15 с закрепленной на ней сборкой ТДМ корректируется центровка связки КК-ОККМ (фиг. 2е).
Связка КК-ОККМ переводится в требуемую для выдачи тормозного импульса ориентацию работой органов управления БКА 21 и стабилизируется в этом положении. Связка ОККМ-ТДМ поступательно отводится от БКА путем удлинения телескопических звеньев 13 манипулятора 9 (фиг. 2ж) и отстыковывается путем расфиксации агрегата стыковки 10 и втягивания манипулятора 9. БКА при помощи двигательного модуля 4 совершает маневр увода на безопасное расстояние от связки ОККМ-ТДМ. На ТДМ включаются двигатели 23 (фиг. 2з), выдающие тормозной импульс для увода связки ОККМ-ТДМ в атмосферу Земли, причем компенсация возможных возмущений движения ОККМ (вызванных, например, колебаниями остатков топлива в баках) осуществляется за счет регулирования тяг одного или нескольких двигателей ОККМ бортовым комплексом управления 27. После выполнения маневра увода перемещением каретки 15 с закрепленной на ней сборкой ТДМ корректируется центровка КК и осуществляется программа перелета к следующему ОККМ в группе. После выполнения программы полета и исчерпании всех ТДМ БКА утилизируется уводом в атмосферу Земли.
Возможен вариант исполнения КК, при котором он утилизируется состыкованным с последним ОККМ в группе, для чего на каретке 15 могут быть дополнительно предусмотрены агрегаты стыковки 28 к ОККМ 1 за край сопла маршевой двигательной установки 11. При помощи агрегатов 28 каретка фиксируется в сопле 11 ОККМ, что обеспечивает дополнительную жесткую связь БКА и ОККМ.
Возможен вариант исполнения КК, при котором на открытом краю контейнера 7 дополнительно устанавливаются телескопические амортизаторы 29 с приводами 30 и агрегатами захвата 31. На этапе захвата ОККМ манипулятором амортизаторы 29 приводами 30 подводятся к первому звену манипулятора и фиксируют его агрегатами захвата 31, создавая дополнительную амортизацию возмущений, воспринимаемых манипулятором 9. После стабилизации связки КК-ОККМ и выравнивания осей ОККМ и КК перед стягиванием амортизаторы 29 разворачиваются приводами 30 навстречу ОККМ и при стягивании захватывают агрегатами захвата 31 силовой элемент конструкции ОККМ (например, торцевого шпангоута ступени ракеты-носителя), что обеспечивает дополнительную жесткость соединения КК и ОККМ.
Таким образом, благодаря данному техническому решению:
1. Обеспечивается заданное положение центра масс КК по мере расходования топлива в двигательном модуле и перемещения ТДМ из модуля полезной нагрузки в ОККМ, что упрощает алгоритмы системы управления, расход энергии на стабилизацию КК, что повышает надежность КК.
2. Стыковка КК с соплом маршевого двигателя ОККМ за счет использования телескопического манипулятора, установленного на оси симметрии КК, приближена к схеме «штырь-конус», где роль штыря, имеющего несколько степеней свободы исполняет манипулятор, а роль конуса - сопло маршевого двигателя ОККМ. За счет захвата ОККМ за точку, лежащую на его продольной оси, манипулятором, установленным на продольной оси симметрии КК, увеличивается диапазон угловых скоростей вращения ОККМ из-за устранения эксцентриситетов сил реакций связей и снижается уровень динамических нагрузок и возмущающих моментов в процессе захвата ОККМ манипулятором, что приводит к уменьшению расхода рабочего тела и электроэнергии, а, следовательно, и массы КК.
3. Установка ТДМ в сопло ОККМ происходит только за счет поступательного перемещения ТДМ, без использования многозвенного монтажного манипулятора, что уменьшает массу изделия, упрощает алгоритмы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перемещения объектов космического мусора с постепенным использованием его вещества космическим аппаратом, оснащенным лазерной двигательной установкой | 2017 |
|
RU2679938C1 |
| МАЛЫЙ РАЗГОННЫЙ БЛОК | 2024 |
|
RU2830531C1 |
| Межорбитальный космический транспортный модуль | 2024 |
|
RU2834259C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| СПОСОБ ПРОВЕДЕНИЯ ЛЁТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ АВТОНОМНОГО СТЫКОВОЧНОГО МОДУЛЯ ДЛЯ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2016 |
|
RU2643020C1 |
| ПИЛОТИРУЕМЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ | 2001 |
|
RU2220077C2 |
| МНОГОРАЗОВЫЙ ДВУХМОДУЛЬНЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ | 1989 |
|
SU1663894A1 |
| Способ определения последовательности перелётов между объектами космического мусора в окрестности геостационарной орбиты | 2020 |
|
RU2759026C1 |
| Способ определения последовательности перелётов между объектами космического мусора при значительном отличии в долготе восходящего узла их орбит | 2018 |
|
RU2688120C1 |
| Способ увода объектов крупногабаритного космического мусора и устройство для его реализации | 2021 |
|
RU2775092C1 |
Изобретение относится к области машиностроения, а более конкретно к утилизации космического мусора. Космический комплекс для утилизации группы объектов космического мусора состоит из базового космического аппарата и нескольких тормозных двигательных модулей. К двигательному модулю присоединены соосно продольной строительной оси модуль полезной нагрузки и агрегатный отсек. В состав комплекса входит один многозвенный манипулятор, одно или несколько звеньев которого выполнены телескопическими, установленный соосно продольной оси комплекса и снабженный устройством захвата. Модуль полезной нагрузки выполнен в виде тонкостенного цилиндрического контейнера с одним днищем. Манипулятор с зазором проходит сквозь центральные отверстия модулей. Производится установка в сопло объекта комического мусора. Достигается снижение массы. 3 з.п. ф-лы, 3 ил.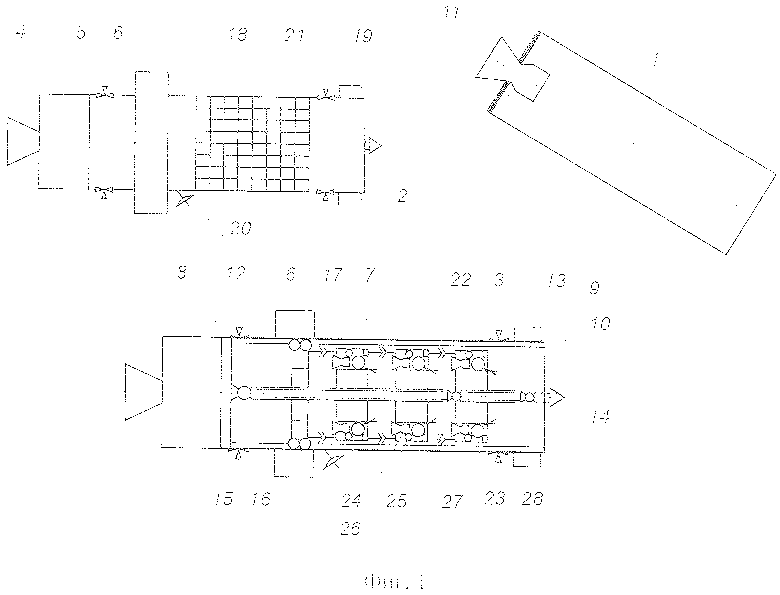
1. Космический комплекс для утилизации группы объектов космического мусора, содержащий базовый космический аппарат, состоящий из двигательного модуля и присоединенных к нему соосно продольной строительной оси модуля полезной нагрузки и агрегатного отсека, и как минимум один тормозной двигательный модуль, размещенный в отсеке полезной нагрузки, отличающийся тем, что модуль полезной нагрузки выполнен в виде тонкостенного цилиндрического контейнера с одним днищем, которое жестко соединено с двигательным модулем; внутри контейнера на днище закреплен в транспортном положении вдоль продольной оси контейнера многозвенный стыковочный манипулятор, имеющий связанные приводами минимум два звена, причем как минимум одно телескопическое раздвижное звено, и снабженный агрегатом стыковки для захвата объекта космического мусора за область критического сечения сопла маршевой двигательной установки; на внутренней поверхности контейнера установлены направляющие, по которым поступательно вдоль оси контейнера может перемещаться оснащенная приводом каретка с установленными на ней узлами сцепки с тормозным двигательным модулем, имеющим кольцевую конструктивно-компоновочную схему с корпусом, имеющим центральное отверстие, и с равномерным распределением по окружности корпуса минимум четырех ракетных двигателей, баков с компонентами топлива, баллонов наддува, блоков бортового комплекса управления, агрегатов стыковки к краю сопла маршевой двигательной установки, и узлов сцепки с другими тормозными двигательными модулями и подвижной кареткой при их расположении коаксиально продольной оси модуля полезной нагрузки так, что манипулятор с зазором проходит сквозь центральные отверстия модулей, и поступательном перемещении вдоль этой оси для установки в сопло объекта комического мусора и обеспечения центровки комплекса; на внешней поверхности контейнера установлена панель солнечных батарей, датчики, антенно-фидерные устройства, двигатели стабилизации и ориентации; агрегатный модуль имеет кольцевую конструктивно-компоновочную схему и расположен соосно с модулем полезной нагрузки на расстоянии от днища контейнера, выбранном из условия заданной центровки комплекса.
2. Комплекс по п. 1, отличающийся тем, что в качестве двигательного модуля использована модификация существующего разгонного блока.
3. Комплекс по п. 1, отличающийся тем, что на каретке дополнительно предусмотрены агрегаты стыковки к объекту космического мусора за край сопла маршевой двигательной установки.
4. Комплекс по п. 1, отличающийся тем, что на открытом краю контейнера модуля полезной нагрузки дополнительно установлены минимум четыре телескопических амортизатора с приводами и агрегатами захвата первого ближайшего к днищу контейнера звена манипулятора или силового элемента конструкции объекта космического мусора.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| RU 2016142502 А, 28.04.2018 | |||
| US 2012076629 A1, 29.03.2012 | |||
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |

