ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, помимо прочего, к использованию технологии радиочастотной идентификации (RFID) или технологии RFID в комбинации с другими технологиями обнаружения транспортного средства и/или идентификации транспортного средства и/или верификации идентичности транспортного средства. Считается, что изобретение может в частности использоваться в контексте дорожных транспортных средств, особенно зарегистрированных дорожных транспортных средств, например, для обнаружения транспортных средств демонстрирующих "ненормальное" поведение или поведение не соответствующее правилам дорожного движения, или для обнаружения транспортных средств, которые были неправильно идентифицированы (включая случаи, в которых идентичность транспортных средств не может быть подтверждена) и/или которые не идентифицируют себя, и т.д. Это может помочь облегчить, например, немедленное придорожное вмешательство, где это необходимо или уместно. Однако изложенное выше не подразумевает конкретных ограничений, и изобретение потенциально также может быть использовано в широком диапазоне других областей применения. В качестве примера, изобретение может потенциально найти применение в контексте железнодорожных транспортных средств или транспортных средств, используемых в недорожных применениях, таких как рудники или промышленные производства и т.д. Тем не менее, для удобства, изобретение здесь и далее будет описано со ссылкой и в контексте зарегистрированных дорожных транспортных средств, таких как автомобили, грузовики, автобусы, мотоциклы и т.д.
[0002] Следует четко понимать, что простое упоминание здесь предыдущих или существующих устройств, приборов, продуктов, систем, способов, практических применений, публикаций или любой другой информации, или каких-либо проблем или вопросов, не означает подтверждения или признания того, что любое из этого по отдельности или в любой комбинации составляли часть общего знания специалистов в данной области, или что они допустимы для предшествующего уровня техники.
[0003] В контексте настоящего изобретения, "идентичность транспортного средства" будет обычно определяться по отношению к (или от) одному или большему количеству идентификатору(ов), присущему индивидуальному транспортному средству. Обычно уникальным идентификатором(ми) будет являться (или будет включать) номер
регистрации (номерной знак), хотя идентификатор(ы) может также быть (или включать) любой комбинацией дополнительной/другой информации, описывающей или относящейся к транспортному средству, его внешнему виду, другим идентификационным кодам транспортного средства или идентификаторам, используя параметры и/или идентификатор устройства или носителя, содержащего "идентификацию транспортного средства".
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] По меньшей мере в общем виде настоящее изобретение относится к устройству, выполненному с возможностью обнаружения и идентификации транспортных средств, причем каждое из индивидуальных транспортных средств имеет по меньшей мере одно устройство связи RFID, установленное на них вблизи поверхности, по которой перемещаются транспортные средства, и устройство(а) связи RFID транспортного средства выполнено с возможностью отражения модулированного сигнала на устройство, указывающего на идентичность этих транспортных средств, указанное устройство содержит RFID считыватель, содержащий антенну, которая выполнена с возможностью установки на или в поверхности, по которой перемещаются транспортные средства, и антенна выполнена с возможностью передачи сигнала на устройство(а) связи RFID транспортного средства и получения модулированного отраженного сигнала от устройства связи RFID на этом транспортном средстве, указывающего на идентичность этого транспортного средства, так что это транспортное средство, таким образом, идентифицируется устройством, причем диаграмма направленности антенны имеет форму широкую и низкую (плоскую) относительно поверхности, по которой перемещаются транспортные средства.
[0005] Если устройство обнаруживает немодулированный отраженный сигнал от транспортного средства (или от корпуса транспортного средства и т.д.) при отсутствии модулированного сигнала от устройства связи RFID на этом транспортном средстве, то это транспортное средство обнаруживается, но не идентифицируется устройством, и это указывает на то, что устройство связи RFID на этом транспортном средстве может отсутствовать или не функционировать должным образом.
[0006] Антенна устройства RFID считывателя может иметь неориентированную диаграмму направленности (или направленную независимо от направления) относительно поверхности, по которой перемещаются транспортные средства. Антенна устройства RFID считывателя может быть выполнена с возможностью использования на или в поверхности, по которой перемещаются транспортные средства и для предоставления широкой и низкой формы диаграммы направленности, предпочтительно тороидальной или более предпочтительно в виде широкого низкого эллиптического тора. Такая диаграмма направленности может быть сравнима с (контрастировать с) обычной продолговатой и сфокусированной/ориентированной диаграммой направленности обычной антенны RFID считывателя. И если диаграмма направленности антенны неориентированная (или не зависит от направления) относительно поверхности, по которой перемещаются транспортные средства, это может обеспечить преимущество в виде устранения необходимости правильного ориентирования антенны устройства RFID считывателя при размещении/установке/позиционировании устройства с целью использования. Антенна может быть прикрыта для уменьшения эффекта ослепления (ниже обсуждается дополнительно).
[0007] В некоторых предпочтительных вариантах реализации изобретения, энергия излучения антенны RFID считывателя может быть сконцентрирована в области близкой к, но расположенной над (например, от около 200 мм до 1200 мм выше) поверхностью, по которой перемещаются транспортные средства, и область может соответствовать диапазону высот, в котором устанавливаются устройства связи RFID на транспортных устройствах.
[0008] Очень часто (хотя, конечно, не обязательно исключительно) устройство будет использоваться в применениях, в которых транспортные средства являются зарегистрированными дорожными транспортными средствами, причем устройство(а) связи RFID на транспортном средстве устанавливается на или в одном или большем количестве номерных знаков транспортного средства, а устройство считывателя RFID, включая его антенну, выполнены с возможностью находиться на поверхности дороги или устанавливаться в поверхность дороги.
[0009] В таких дорожных применениях устройство RFID считывателя в случае встречи с устройством связи RFID на/в пластине номерного знака транспортного средства, может иметь диапазон считывания от около 6 до 10 метров. Область считывания устройства для считывания устройства связи RFID на пластине номерного знака транспортного средства может начинаться около 5 м до антенны считывателя RFID и заканчиваться около 5 м за антенной считывателя RFID в направлении перемещения транспортного средства по дороге. Область считывания устройства может быть примерно 4 метра в ширину. Расстояние от около 1 м до антенны считывателя RFID до около 1 м после антенны считывателя RFID в направлении перемещения транспортного средства может исключаться из области считывания (это может помогать устранению проблемы связанной с ослеплением и сложностями, связанными с углом считывания). Часто, область считывания может быть от около 100 мм до 1500 мм, и более часто от 200 мм до 1200 мм, выше над поверхностью дороги (как описано выше, это может соответствовать диапазону высот, в котором устройство(а) связи RFID устанавливаются на транспортных средствах).
[0010] Устройство может иметь возможности радара. Устройство может быть выполнено с возможностью (используя радар или переменный/дифференциальный радар) обеспечения одного из следующего или их комбинаций: определения скорости и/или положения транспортного средства и получения эффективной отражающей поверхности движущегося транспортного средства.
[0011] Устройство дополнительно может быть выполнено с возможностью обеспечения одного или большего из следующего: определения длины и/или вычисления числа осей транспортного средства, генерирования радиочастотных характерных особенностей транспортного средства, и обеспечения беспроводной связи с контроллером расположенным удаленно от устройства.
[0012] Устройство может также содержать устройство формирования изображения расположенное на или в поверхности, по которой перемещаются транспортные средства. Устройство формирования изображения может быть выполнено с возможностью получения неподвижного изображения(й) транспортного средства, или части транспортного средства, в то же время (по меньшей мере приблизительно), когда устройство RFID считывателя пытается передавать и принимать сигналы на и от устройств(а) связи RFID этого транспортного средства для идентификации транспортного средства посредством RFID. Устройство формирования изображения может быть выполнено с возможностью получения неподвижного изображения(й) транспортного средства, или части транспортного средства, в случае, если транспортное средство находится на одном или большем количестве фиксированных расстояний от устройства формирования изображения. Изображение(я) транспортного средства, полученное устройством формирования изображения, может быть использовано для помощи в верификации того, соответствует ли идентичность транспортного средства идентичности, указанной в отраженном модулированном сигнале, переданном устройством(ами) связи RFID транспортного средства и полученного считывателем RFID. Устройство формирования изображения может быть выполнено с возможностью помощи в наблюдении и/или идентификации по меньшей мере определенного поведения транспортного средства.
[0013] В другой возможной широкой форме, настоящее изобретение относится к системе для обнаружения, идентификации и/или мониторинга транспортных средств, в которой каждое из индивидуальных транспортных средств имеет по меньшей мере одно устройство связи RFID, установленное на нем вблизи поверхности, по которой перемещаются транспортные средства, и устройство(а) связи RFID транспортного средства выполнено с возможностью отражения модулированного сигнала, указывающего на идентичность этого транспортного средства, причем система содержит по меньшей мере одно устройство описанного выше типа, и контроллер, связанный с указанным устройством(ами).
[0014] В случае если система содержит множество указанных устройств, два или большее количество устройств могут быть выполнены с возможностью связи и синхронизации друг с другом, или система может быть выполнена с возможностью синхронизации двух или более устройств, так что диаграммы направленности антенн указанных двух или более устройств (как синхронизированная группа) функционируют, по сути, как одна более широкая диаграмма направленности.
[0015] Очень часто (хотя, конечно, не обязательно исключительно), система будет использоваться в применениях, в которых транспортные средства являются зарегистрированными дорожными транспортными средствами и устройство(а) связи RFID на транспортном средстве(ах) устанавливается на или в одном или большем количестве номерных знаков транспортного средства. В таких применениях, система может содержать одну или большее количество станций в различных местах расположения на дороге, и каждая станция может иметь одно или большее количество устройств или синхронизированную группу устройств и контроллер, связанный с указанными устройствами, который может быть локальным придорожным контроллером. Каждая станция (или ее придорожный контроллер) может быть связана с удаленным системным контроллером.
[0016] Одна или большее количество станций могут содержать дорожную камеру, выполненную с возможностью содействия наблюдению за поведением транспортного средства или для содействия отслеживанию транспортных средств как объектов изображения. Одна или большее количество станций могут содержать метеостанцию.
[0017] Придорожный контроллер станции может быть выполнен с возможностью связи с придорожным контроллером одной или большего количества других станций. Придорожный контроллер станции может использовать информацию от придорожного контроллера(ов) одной или большего количества других станций, информацию от удаленного системного контроллера, и/или данные от его одного или большего количества устройств или синхронизированной группы устройств, для обнаружения поведения по меньшей мере определенного транспортного средства. Придорожный контроллер станции может передавать свои наблюдения поведения транспортного средства на придорожный контроллер(ы) одной или большего количества других станций и/или на удаленный системный контроллер. Придорожный контроллер станции может передавать свои наблюдения наблюдаемого поведения транспортного средства, и/или идентичность транспортного средства, транспортному средству полиции или персоналу, расположенному на предполагаемом маршруте движения транспортного средства.
[0018] Любые из описанных выше отличительных признаков, могут быть объединены с любым другим одним или более из описанных здесь отличительных признаков в объеме изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0019] Предпочтительные признаки, варианты реализации и изменения в изобретении могут быть рассмотрены из последующего описания, озаглавленного "ПРЕДПОСЫЛКИ К, МОТИВАЦИЯ ДЛЯ, ОПИСАНИЕ ИЗОБРЕТЕНИЯ", которое предоставляет достаточную информацию для специалистов в данной области техники для реализации изобретения. Описание, данное под заголовками "ПРЕДПОСЫЛКИ К, МОТИВАЦИЯ ДЛЯ, ОПИСАНИЕ ИЗОБРЕТЕНИЯ" не следует считать как ограничивающее объем предшествующего "СУЩНОСТИ ИЗОБРЕТЕНИЯ" каким либо способом, и в нем будут ссылки на множество фигур, перечисленных ниже.
[0020] Следует отметить, что некоторые Фигуры содержат номера ссылок, идентифицирующие конкретные изображенные на них особенности или детали. Множество этих номеров ссылок также упоминаются в приведенном ниже описании. Способ, по которому конкретные номера ссылок в Фигурах ссылаются на приведенное ниже описание такой, например, что номер ссылки 1 появляющийся на Фигуре 3 будет упоминаться как "3-1", и подобным образом номер ссылки 6 появляющийся на Фигуре 21 будет упоминаться как "21-6" и т.д.
[0021] Фигура 1 иллюстрирует дисплей, который может быть типичным для случая комнаты управления движением с множеством (в этом случае девятью) согласованными входящими видеопотоками от различных широкоугольных камер движения в различных местах установки.
[0022] Фигура 2 демонстрирует изображение под малым углом, камеры высокого разрешения с возможностью чтения номерных знаков транспортного средства по более чем одному ряду дороги.
[0023] Фигура 3 схематически иллюстрирует множество объектов, которые влияют на четкость изображения, получаемого устройством формирования изображения транспортного средства (например, камеры движения). Как проиллюстрировано на Фиг. 3, такие объекты включают грязь 3-1 на линзах и/или на окне корпуса содержащего камеру 3-5, воздушные загрязнения и потоки воздуха 3-6 (например, пыль, смог или другие частицы или загрязнения, которые уменьшают прозрачность воздуха, особенно при переносе ветром/движении, а также тепловые волны и им подобное, которое может создавать отсвечивание или дымку), препятствия на линии визирования 3-4 в части между камерой 3-5 и транспортным средством/объектом 3-3 (такие препятствия линии визирования могут быть даже на транспортном средстве, например, прикрывая или частично прикрывая номерной знак), грязь или другие загрязнения на номерном знаке транспортного средства 3-2. Легко понять, что четкость, в общем, уменьшается с увеличением расстояния между камерой 3-5 и транспортным средством/объектом 3-3.
[0024] Фигура 4 является фотографической иллюстрацией случая в котором пассажир автомобиля скрывается в задней части/багажнике автомобиля, затем вытягиваясь для прикрытия номерного знака своей рукой (в целях избегания идентификации транспортного средства посредством распознания изображения) по мере того как автомобиль перемещается мимо камеры движения или пункта оплаты.
[0025] Фигура 5 иллюстрирует вид со стороны, на использование мостового пролета для считывания метки RFID на ветровом стеле транспортного средства и номерном знаке.
[0026] Фигура 6 иллюстрирует случаи с верхним RFID считывателем и боковым RFID считывателем, как будет видно ниже.
[0027] Фигура 7 иллюстрирует место расположения RFID считывателя в дороге (слева), и место расположения RFID считывателя на дороге (справа), как будет видно ниже, Фигура 8 иллюстрирует последнее при виде сбоку.
[0028] Фигура 9 иллюстрирует датчик (датчик содержит камеру и антенну RFID считывателя) который располагается на дороге. На Фигуре 9, изображено транспортное средство на расстоянии (4 м) от датчика.
[0029] Фигура 10 иллюстрирует транспортное средство на Фигуре 9, рассмотренное с ракурса камеры датчика (отметим, что датчик располагается на дороге - смотрите Фигуру 9), с транспортным средством снова на том же расстоянии (4 м) от датчика как на Фигуре 9.
[0030] Фигура 11 подобна Фигуре 10 тем, что иллюстрирует транспортное средство по Фигуре 9, рассматриваемое с ракурса камеры датчика, за исключением того, что транспортное средство на более коротком расстоянии (2 м) от датчика.
[0031] Фигура 12 - живописная иллюстрация формы негативного поведения транспортного средства/водителя обычно упоминаемой как "несоблюдение дистанции", что иногда используется при попытке избежать идентификации камерой.
[0032] Фигура 13 демонстрирует номерной знак транспортного средства, который был установлен скошено под некоторым углом для уменьшения возможности чтения номерного знака посредством верхней или боковой камеры.
[0033] Фигура 14 иллюстрирует искажение изображения в перспективе, которое имеет место в случае, когда номер транспортного средства наблюдается под углом, а не напрямую. Это искажение, совместно с эффектом размытия связанным с движением транспортного средства, вызывает необходимость в фронтальном ракурсе камеры движения (или по меньшей мере близком к фронтальному). Эта необходимость в свою очередь вызывает увеличение необходимого расстояния считывания из-за места расположения/позиционирования, в котором должна находиться камера, чтобы не располагаться на пути транспорта, но по прежнему получать "фронтальное" изображение номерных знаков транспортного средства, а увеличение необходимого расстояния считывания дополнительно приводит к увеличению потенциальных видимых преград (смотрите Фигуру 3, например).
[0034] Фигура 15 является графиком "диаграммы направленности" (также упоминаемой как "диаграмма антенны" или "диаграмма направленности антенны в дальней зоне") для направленной (узкой апертуры) антенны. Диаграмма направленности является отображением того как изменяется коэффициент усиления антенны в зависимости от направления.
[0035] Фигура 16 является схематическим отображением типичной конструкции прямоугольной микрополосковой антенны.
[0036] Фигура 17 иллюстрирует неоптимальный считыватель и ориентацию антенной метки в зависимости от апертуры сфокусированной антенны.
[0037] Фигура 18 иллюстрирует то, как изменяется угол считывания в зависимости от движения транспортного средства в случае верхнего считывания RFID знака.
[0038] Фигура 19 демонстрирует номерной знак транспортного средства, который был установлен в углублении для его защиты от повреждений.
[0039] Фигура 20 иллюстрирует путь перемещения фронта транспортного средства и заднего номера в случае верхнего расположения области считывания RFID считывателя.
[0040] Фигура 21 иллюстрирует путь перемещения метки установленной на ветровом стекле транспортного средства в зоне считывания верхнего RFID считывателя.
[0041] Фигура 22 иллюстрирует факторы, которые влияют на создание нелинейных отклонений сигнала между верхней антенной и меткой RFID установленной на лобовом стекле.
[0042] Фигура 23 иллюстрирует необходимую (или по меньшей мере желаемую) диаграмму направленности RFID излучения для антенны считывателя, расположенной в/на дороге.
[0043] Фигура 24 иллюстрирует влияние короткого интервала следования между диаграммой направленности классической прямоугольной полосковой антенны и плоской диаграммой направленности, излучаемой из считывателя в/на дороге.
[0044] Фигура 25 иллюстрирует диаграмму направленности излучения, выталкиваемую вверх из-за влияния проводящей подстилающей земной поверхности.
[0045] Фигура 26 иллюстрирует типичную диаграмму направленности вертикальной дипольной антенны в свободном пространстве.
[0046] Фигура 27 демонстрирует рассчитанную диаграмму направленности антенны, которая выполнена с возможностью обеспечения диаграммы направленности в общем подобной форме диаграммы направленности вертикальной дипольной антенны, в случае если указанная антенна расположена на или в дороге с ее центральной точкой отвода на одном уровне с поверхностью дороги.
[0047] Фигура 28 иллюстрирует желаемую область считывания для оборудованного RFID номерного знака транспортного средства.
[0048] Фигура 29 схематически иллюстрирует ориентацию метки номерного знака в области считывания в RFID считывателе в/на дороге или камере.
[0049] Фигура 30 иллюстрирует эффективную область считывания для метки RFID на номерном знаке транспортного средства, когда считывание производится антенной в дороге или на дороге, антенной имеющей диаграмму направленности общей формы показанной на Фигуре 27.
[0050] Фигура 31 иллюстрирует, пример, в котором используется отдельный или множество RFID считывателей с получающейся в результате эффективной областью считывания, в различных случаях считывания.
[0051] Фигура 32 иллюстрирует расположение множества считывателей на дороге в случаях с независимой и синхронизированной фазой (соответственно).
[0052] Фигура 33 иллюстрирует использование нескольких отдельных (и одного множественного) располагаемых на дороге RFID считывателей при создании оцепления транспортного средства вокруг интересующей точки.
[0053] Фигура 34 является схематическим изображением одной частной (возможной) реализации системы.
[0054] Фигура 35 и Фигура 36 являются схематическими иллюстрациями расположения системных компонентов.
[0055] Фигура 37 схематически иллюстрирует возможный вариант реализации устройства устанавливаемого в/на дорогу.
[0056] Фигура 38 иллюстрирует механизм, который может использоваться для легкого удаления устройства по Фигуре 37 с дороги (в случае внутридорожного расположения).
УРОВЕНЬ ТЕХНИКИ, МОТИВАЦИЯ И ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0057] В большинстве стран, транспортные средства, такие как автомобили, грузовики, автобусы, мотоциклы и т.д. должны быть законно зарегистрированы для законного передвижения на общественных дорогах. Такие транспортные средства также, в общем, должны быть идентифицируемы на и вне дороги, в том числе людьми (например, полицейским или уполномоченным персоналом, и даже членами широкой общественности) без использования электронных устройств. Следовательно, транспортные средства, в общем, должны быть идентифицируемы (на и вне дороги) при простом визуальном осмотре. Для этого, от транспортных средств требуется демонстрация номерного знака транспортного средства с примерно 1900 года, после публичного протеста из-за первого зафиксированного дорожно-транспортного происшествия со смертельным исходом, которое имело место 13 сентября 1899.
[0058] После их введения, номерные знаки транспортных средств стали проверенным способом положительной идентификации транспортных средств. Однако преступники, вроде печально известного Аль Капоне, еще в 1920-х начали тенденцию использования подделанных, прикрытых, скопированных и украденных номерных знаков для сокрытия идентичности транспортного средства. Это породило требование к необходимости проверки аутентичности номерного знака транспортного средства.
[0059] Таким образом, стали использоваться дополнительные регистрационные документы для помощи в верификации идентичности транспортного средства отображаемой номерным знаком. Однако для проверки этих документов, транспортное средство следует сместить к обочине и остановить. Изначально небольшое количество транспортных средств на общественных дорогах делало эту проверку с остановкой и последующим отъездом высокоэффективной, приводя, в общем, к доверию относительно того, что номера, демонстрируемые на транспортном, средстве были действительно правильными, подлинными, законными и на правильном транспортном средстве.
[0060] Однако, в последнее время, во многих (если не во всех) частях мира, количество транспортных средств в собственности резко увеличилось. Следовательно, количество зарегистрированных транспортных средств перемещающихся по общественным дорогам также резко увеличилось. Это привело к увеличению трафика, перегруженности и числа дорожных нарушений, которые в свою очередь привели к заметному уменьшению эффективности трафика и дорожной безопасности.
[0061] В то же время, увеличение объема трафика, перегруженности и т.д. сделало значительно более сложной проверку идентичности транспортного средства и выполнения корректирующих или полицейских действий (при необходимости). Например, время и место, необходимые для остановки и проверки номерных знаков транспортного средства и регистрационных документов (то есть, для индивидуальных транспортных средств) значительно уменьшило процент проверенных транспортных средств на дороге, так значительно, что в наши дни множество транспортных средств могут никогда не проверяться за время своей эксплуатации. Это, следовательно, увеличивает надежду на положительную идентификацию транспортного средства по номеру транспортного средства. Эта общая тенденция стала очевидной в частях Австралии (например), где дополнительные регистрационные документы, которые ранее требовалось демонстрировать на ветровом окне транспортного средства (или в некоторых других подходящих местах расположения на транспортном средстве для мотоциклов, грузовиков и т.д.) более не используются.
[0062] Сегодня часто используются способы обработки изображений номерных знаков транспортных средств для автоматизации идентификации транспортных средств на дороге. Способы RFID идентификации (использующие как пассивную, так и активную RFID) также используются в настоящее время, хотя сейчас RFID преимущественно используется для платных дорог и платных въездов.
[0063] Однако, упомянутые выше основанные на RFID системы (используемые для оплаты и т.д.), и подобно упомянутым выше системам, которые используют обработку изображений для осуществления идентификации транспортных средств, в общем, не проверяют аутентичность идентичности транспортных средств во время записи идентичности. Скорее, они обычно делают это "постфактум" в более позднее время/дату. Поэтому, если идентичность транспортного средства определенная посредством систем на основании RFID или обработки изображения оказалась не совсем правильной идентичностью для изучаемого транспортного средства (например, из-за ошибки автоматизированной системы идентификации транспортных средств или из-за преднамеренной попытки скрыть идентичность транспортного средства), этот факт удается узнать лишь спустя время, и часто мало что можно сделать для определения правильной идентичности транспортного средства. Обнаружение неправильно определенных транспортных средств или транспортных средств, которые вовсе не были определены, таким образом, остается проблемой.
[0064] Поведение водителя является наиболее серьезным фактором, влияющим на трафик и дорожную безопасность в данных инфраструктурных и демографических ограничивающих условиях. Поведение водителя часто заметно (и наблюдаемо) по наблюдаемому поведению транспортного средства (особенно негативное поведение водителей, такое как превышение скорости, движение зигзагами, несоблюдение дистанции и т.д.). В качестве примера этого, наблюдаемое виляние, петляние или неустойчивое поведение транспортного средства может указывать (или по меньшей мере давать повод для подозрений) на то, что водитель ведет транспортное средство будучи опьяненным (и, следовательно, незаконно). "'Ненормальное" или "поведение транспортного средства несовместимое с правилами дорожного движения" подобное этому негативно влияет на трафик, управление трафиком и дорожную безопасность в целом.
[0065] Соображения о том, что возможность и/или предположение о возможности того, что удастся избежать идентификации (например, вера водителя транспортного средства в то, что транспортное средство может быть способным избежать идентификации) приводит к увеличению негативного водительского поведения. Этот феномен является обычным для человеческого поведения, как описано в области Психологии Толпы, где анонимность в толпе может приводить к оппортунистическому негативному поведению.
[0066] В настоящее время, поведение транспортного средства в основном наблюдается людьми и обусловлено людьми. Исходя из наблюдения поведения транспортного средства (напомним, что поведение транспортное средство часто указывает на поведение водителя), случай негативного поведения транспортного средства может наблюдаться напрямую человеком (например, полицейским или другим дорожным пользователем, присутствующим в данном случае, который может напрямую засвидетельствовать/видеть случай негативного поведения транспортного средства) или наблюдение может быть сделано человеком, который находится на удаленной локации посредством одной или более камер движения. Использование камер движения, однако, требует позитивной идентификации транспортного средства для вмешательства. Таким образом, в случаях, в которых негативное поведение транспортного средства наблюдается посредством камеры движения, но связанное с ним транспортное средство не идентифицируется или идентифицируется не правильно, нарушитель часто избегает привлечения к ответственности.
[0067] На основании приведенного выше, представляется, что эффективное управление трафиком и/или планирование трафика и/или планирование дорог и/или обеспечение правопорядка может требовать по меньшей мере одно, и возможно, комбинацию следующего: определение присутствия транспортного средства, идентификацию транспортного средства (или определение идентификации транспортного средства), верификацию идентификации транспортного средства, и определение поведения транспортного средства в данном времени и в данном месте (предпочтительно для такого большого количества явлений, которое только возможно, и предпочтительно, в соответствующей комбинации, как требуется в случае применения).
[0068] Из приведенного выше также следует отметить, что по многим причинам, существует увеличивающаяся необходимость возможности обнаружения транспортных средств (как индивидуальных транспортных средств, так и групп/скоплений транспортных средств), а также возможности идентификации и верификации идентичности обнаруженных транспортных средств. В связи с этим, исследования указывают на то, что точность идентификации и верификации транспортных средств должна быть предпочтительно около 99.99% (то есть, считается приемлемым допуск одного случая "пропущенного" обнаружения/идентификации/верификации на каждые 10000 транспортных средств). Однако в настоящее время показатель точности автоматической идентификации транспортных средств при применении ИТС (интеллектуальная транспортная система) является близким к 95%, даже при использовании как обработки изображений, так и радио-способов (это эквивалентно неожиданному и неприемлемо низкому допуску одого случая пропущенного обнаружения/идентификации/верификации на каждые 20 транспортных средств).
[0069] По этим соображениям, может быть желательным предоставление автоматического способа/системы, вероятно объединяющего различные технологии для обнаружения, идентификации и/или верификации идентичности транспортных средств, и также может быть желательным подача тревожного сигнала находящемуся поблизости человеку (и/или возможно автоматической системе) об обнаружении транспортных средств, которые неправильно идентифицируются или не идентифицируются вовсе, для немедленного вмешательства или для того, чтобы такие транспортные средства могли быть посредством электроники "отслежены" до точки, в которой вмешательство/судебное преследование может иметь место. Это может позволять отличать обнаруживаемые и наблюдаемые транспортные средства, ведущие себя ненормально и/или имеющее подозрительную идентичность (или без идентичности), от обнаруживаемых транспортных средств для которых поведение определяется как не нарушающее (в норме) и идентичность которых проверена как действительная. Считается, что если можно этого достичь, это может дать в результате более высокое соблюдение правовых норм в смысле положительного определения идентичности транспортного средства и верификации и, следовательно, увеличения положительного поведения на дороге. Также существует надежда, что возможности для избегания обнаружения транспортных средств могут быть уменьшены. Фокусировка на (и, хотелось бы надеяться, обеспечение способности) помощи для немедленного (или более скорого, более целенаправленного или более разумного) вмешательства может также уменьшить время и стоимость ограниченных ресурсов расходуемых властями на идентификацию "постфактум" и верификацию идентичности транспортных средств. Также может быть предпочтительным, чтобы такая система могла легко и/или быстро и/или экономически выгодно устанавливаться в случаях постоянного и/или временного размещения.
[0070] Необходимость в автоматическом обнаружении транспортного средства и идентификации для обеспечение исполнения правил дорожного движения и т.д. (например, улавливания случаев превышения скорости, проезда на красный свет и т.д.) для планирования трафика и дорог и для автоматических механизмов регулирования трафика (например, сбора оплаты, измерение разгона, ограничения динамической скорости и т.д.) уже привела к увеличению диапазона инноваций, имеющих отношение к автоматическому обнаружению транспортных средств, классификации и идентификации. Ранее предложенные автоматизированные способы обнаружения могут в значительной степени быть объединены в определенные категории; эти категории включают: обнаружение наличия транспортного средства (например, используя магнитные контуры, радары и лазеры), обработку изображений транспортных средств (например, распознание номерных знаков), беспроводный обмен данными (например, V2X) и радиочастотная идентификация (более известная как RFID). "Беспроводная связь" и "RFID" обе являются радиочастотными технологиями, однако различие между ними выражается в отличии в расстояниях, на которых они обычно работают. Беспроводная связь обычно является технологией передачи радиосигналов на сравнительно длинные дистанции (то есть, она работает на сравнительно больших дистанциях) в то время как RFID является технологией передачи радиосигналов на, в основном, сравнительно небольшие расстояния (то есть, работает на сравнительно коротких расстояниях). Диапазон считывания беспроводной связи обычно во много раз больше, чем диапазон считывания RFID. Точка разделения между работой технологий беспроводной передачи данных и RFID технологий часто приблизительно равна линейному пространству, занимаемому движущимся транспортным средством, занимаемым на дороге (то есть, длине транспортного средства плюс минимальное расстояние до следующего транспортного средства).
[0071] Из категорий ранее предложенных автоматизированных технологий описанных выше, одной с возможно наиболее длительной историей является категория датчиков наличия транспортного средства. Обнаружение наличия транспортного средства включает распознание присутствия одного или большего количества транспортных средств, но без уникальной идентификации или верификации идентичности этого/этих транспортных(ого) средств(а). Тем не менее, обнаружение транспортного средства важно, например, для управления трафиком и скоплениями, планирования дорог и т.д. Датчики наличия транспортных средств обычно используются сами по себе для вычисления количества транспортных средств, прошедших определенную точку или количества транспортных средств, прошедших определенную точку за (или в) заданное время. Датчики наличия транспортных средств, поэтому, используются для записи информации о скорости транспортного средства, потоков трафика, количества и скоплений, а также информации, такой как вес транспортного средства, типы транспортных средств (например, вычисление количества осей) и т.д. Сегодня датчики наличия транспортных средств иногда используются совместно с распознанием изображений для дополнительного улучшения распознания типов транспортных средств и даже для идентификации транспортного средства по номерному знаку транспортного средства (и/или использования других деталей относящихся к транспортному средству, которые могут распознаваться из его изображения).
[0072] Технологии распознания изображений находятся в общем использовании во многих частях мира в системах управления трафиком. Например, во многих судебных органах изображение должно сопровождать уведомление/штраф за нарушение правил дорожного движения. Таким образом, в таких судебных органах, если (упомянутое) транспортное средство было уличено в превышении скорости посредством лазерного датчика скорости или радара определения скорости, технология обработки изображения также требуется для предоставления изображения/фотографии транспортного средства во время фиксации нарушения, так что изображение/фотография может сопровождать уведомление о нарушении в качестве доказательства нарушения. Различные предложения были сделаны для объединения функций обнаружения и обработки изображений в одном узле, который может быть, например, переносным или устанавливаемым на фиксированном месте установки. В качестве иллюстративного примера PCT/US 1998020857, US 12367961 и PCT/GB2005000848 описывают различные способы размещения и использования устройства обработки изображения в наблюдаемых транспортных средствах.
[0073] Обработка изображений также используется для наблюдения трафика в режиме реального времени, обычно используя широкоугольное видео, передаваемое в комнату управления. Фигура 1 иллюстрирует дисплей, который может быть типичным для случая комнаты управления движением с множеством (в этом случае девятью) согласованных входящих видеопотоков от различных широкоугольных камер движения в различных местах установки. Для человека возможно (например, служащего в комнате управления, наблюдающего каналы видео в реальном времени) обнаруживать аномалии поведения водителя/транспортного средства и условия трафика из этих каналов видео. Однако, в общем, не обязательно возможно идентифицировать транспортные средства по этим видеоканалам. Тем не менее, транспортное средство, как анонимный объект, может отслеживаться в таком канале видео.
[0074] С другой стороны диапазона, узкоугольные линзы часто используются для идентификации транспортного средства посредством расположения и чтения номера на изображении (это часто может требовать использования довольно сложной технологии оптического распознавания символов) как проиллюстрировано на Фигуре 2.
[0075] Современные высококачественные (и с высоким разрешением) камеры могут потенциально иметь возможность объединять два типа наблюдений описанных выше. Успех такой комбинированной идентификации транспортного средства (выполняемой посредством считывания номеров с данных видео/изображения) и определения поведения (снова на основании видеоданных) является, однако, ограниченным, поскольку наблюдение/обнаружение поведения трафика требует широкого изображения с извиняемой резкостью и четкостью (обычно это требует широкоугольного объектива/камеры), в то время как идентификация номера с другой стороны требует резких, высококонтрастных изображений и обычно это требует узкоугольный объектив/камеру с чистой/не затененной линией обзора между камерой и номерным знаком. Эти требования приводят к высокотехнологическим сложностям и значительной стоимости приложений технологии обработки изображений.
[0076] Обработка изображений является, таким образом, высокоприспособляемой, однако также имеет множество ограничений. Это делает ее очень полезной, но не обязательно способной обеспечить полное решение всех этих вопросов, которые могут быть связаны с мониторингом и/или управлением транспортными средствами/трафиком и/или обеспечением правопорядка. Одним из наиболее значительных ограничений связанных с обработкой изображений является неспособность использовать изображение для верификации того, что номерной знак является, фактически, подлинным (то есть для верификации того, что номерной знак, видимый на изображении, является собственно соответствующим, законно примененным номерным знаком, который должен быть). Все типы изображений, независимо в видимом или невидимом спектре освещения, к несчастью могут быть обмануты. Например, обнаружение посредством камеры, даже при использовании охранных меток текстурированием и смещением изображения, не надежно.
[0077] На практике, имеется также другие проблемы, накладывающие значительные ограничения на использование технологий обработки изображений. Это включает преграды, чистоту объективов, изменение условий освещенности и качество воздуха, и т.д. все из которых имеют тенденцию уменьшения четкости изображения, как представлено на Фигуре 3. Четкость изображения является ключевым фактором в возможности чтения номерных знаков (и, следовательно, идентификации транспортных средств) по изображению. Более обширные диапазоны изображения позволяют обнаруживать поведение транспортного средства, но ограничивают способность надежного чтения цифр номерного знака вследствие соответствующего уменьшения четкости (а также из-за больших возможностей для перекрытия линии визуального обзора). Более короткие расстояния дают лучшее управление освещением и четкостью, однако явления, такие как, например, дождь и пыль, будут по-прежнему ухудшать считывание. Короткие расстояния также ограничивают способность обнаружения поведения транспортного средства. Системы визуального обнаружения часто объединяют более чем одну камеру для обеспечения дальнего обнаружения транспортного средства и чтения номерного знака на коротком расстоянии. В сложных случаях, ближнефокусная камера следит за транспортным средством, пока номерной знак считывается или выходит из области обозрения. Телескопические и увеличительные объективы также позволяют этому "короткому расстоянию" быть растянутым до узкого дальнефокусного пучка. Эти системы являются, однако, сложными, что делает их дорогими для установки и обслуживания. Также, в общем, камеры и объективы требуют высокого уровня обслуживания. Это особенно справедливо для камер автоматического считывания номерных знаков, из-за их высокого уровня сложности и требуемой точности.
[0078] В большинстве случаев, обработка изображений требует менее чем одну миллисекунду и чистый обзор (то есть не перекрытую линию обзора) захвата транспортного средства и номерного знака. Однако даже при выборе правильного момента для записи изображения требуются системы высокой сложности.
[0079] Использование стационарных камер для изображения движущихся транспортных средств практически неизменно включает некоторую степень размытия изображения. Например, даже использование камеры с высокой скоростью выдержки в 1/1000 секунды, транспортное средство, перемещающееся со скоростью 36 км/час, будет перемещаться на 10 мм, пока затвор камеры открыт, а транспортное средство, перемещающееся на скорости 180 км/час, будет перемещаться на 50 мм, пока затвор камеры открыт.Это перемещение транспортного средства во время того, как затвор камеры открыт, приводит к размытию захватываемого камерой изображения (и чем больше величина перемещения за время, пока затвор камеры открыт, тем больше размытие). Символы, появляющиеся на номерных знаках транспортного средства, обычно имеют 10 мм в ширину. Естественно, распознание/чтение номерного знака становиться невозможным, если размытие слишком велико.
[0080] Эффект размытия рассмотренный выше может быть существенно незначительным для того, чтобы быть приемлемым (или им можно даже вообще пренебречь) в случае когда изображение берется фронтально (и с соответствующего расстояния), но с увеличением угла (к одной стороне или другим относительно прямого "фронтального") изображение искажается в перспективе и символы представляются узкими/совмещенными. Это проиллюстрировано на Фигуре 14, и это может привести к усложнению считывания номерного знака, особенно для распознания оптических символов и других автоматизированных систем распознания. Камеры, таким образом, условно устанавливаются на пути (и в месте расположения/позиции) так, чтобы иметь близкий к фронтальному угол, часто на более длинные расстояния. Даже в упомянутом случае, более длинные дистанции часто подвержены проблемам, таким как более высокая возможность для помех на линии обзора, размытие из-за качества воздуха или дождя и т.д. (чем больше расстояние, тем более высоким является количество загрязнений воздуха или дождь и т.д. в пространстве между номерным знаком и объективом камеры), и эти факторы имеют тенденцию уменьшать эффективность считывания изображений.
[0081] Таким образом, в кратком изложении, существует некоторое количество сложностей связанных с использованием обработки изображений (по меньшей мере при использовании отдельно) для обнаружения транспортных средств и идентификации, а обработка изображений (сама по себе) в общем случае не способна верифицировать идентичность транспортного средства вовсе.
[0082] Радиотехнологии, включая "беспроводную связь" и "RFID" технологии упоминаемые выше, имеют возможность аутентификации, не только RFID меток (которые могут предпочтительно располагаться на пластине номерного знака, как обсуждается ниже), но также RFID считывателя, который читает метки. Причиной этому является то, что эти радиотехнологии требуют "умного" устройства на обоих сторонах идентификации; то есть со стороны метки (на транспортном средстве/номерном знаке) и также на стороне считывателя. Специалисту в данной области будет понятно, что криптография со способами реагирования на вызов может использоваться для обеспечения верификации идентичности устройств как на транспортном средстве (например, метки RFID на номерном знаке транспортного средства), так и придорожного RFID считывателя. Было предложено множество систем использующих радиотехнологии для идентифицирования и верификации радиоустройства на транспортном средстве, которое в свою очередь идентифицирует транспортное средство.
[0083] Поскольку используются радиотехнологии, считыватель является главной составляющей частью системы, которая выполняет идентификацию транспортного средства, используя радиотехнологию. В общем, также возможно верифицировать считыватель (или его работу, например, проверяя на предмет неразрешенного вмешательства и/или для проверки правильности работы). Однако то же самое, к несчастью, не всегда может быть сказано относительно, например, радиоустройств, устанавливаемых на номерной знак или на транспортное средство (как RFID метки), которые передают идентичность транспортного средства. Например, может быть сложно доказать, что (или определить является ли) устройство, передающее идентичность транспортного средства, находится фактически на транспортном средство, на котором как кажется/утверждается оно находится, поскольку радиоволны невидимы и радиосчитыватель не может "видеть" происхождение волны, особенно на расстояниях больших, чем длина транспортного средства. Радиотехнологии также имеют другие недостатки в том, что хотя радиотехнологии могут быть использованы для идентифицирования транспортных средств, они, в общем, не способны к мониторингу/оценке поведения транспортного средства (независимо от того, является ли это поведением отдельного транспортного средства или поведением множества транспортных средств на макро/трафик уровне). Следовательно, радиотехнологии, подразумевается, могут быть использованы совместно с обработкой изображений для того чтобы попытаться уменьшить или преодолеть эти ограничения.
[0084] Хотя радиотехнологии часто используются (и довольно хорошо подходят) для верификации идентичности транспортного средства, они не полностью не подверженны так называемой "подмене идентичности". При подмене идентичности, обычно, RFID или другое устройство радиотехнологии на транспортном средстве изменяется или переустанавливается так, чтобы обеспечить отличную (и/или возможно изменяемую) идентичность для того, чтобы избежать обнаружения или для обмана датчика, чтобы можно было подумать, что транспортное средство является собственно другим транспортным средством. Беспроводная связь радиотехнологии часто более уязвима к такого рода вмешательствам (более чем RFID технология, например) поскольку системы беспроводной связи обычно формируют часть сложного компьютерного узла, например, бортовым компьютерным устройством транспортного средства. В случае радиотехнологий беспроводной связи, из-за более длинных расстояний чтения, использование обработки изображений обычно не может помочь в определении такого вмешательства. С другой стороны, близость к линии вне обзора и хорошо определенная диаграмма направленности излучения пассивного отражения СВЧ RFID метки/передатчика могут позволять способы обработки изображений для поддержания обнаружения такого вмешательства. В крайних случаях, однако, даже пассивное отражение СВЧ метки RFID может быть заблокировано, и в то время как визуальное/изображение подтверждение может заставить наблюдателя поверить, что наблюдаемая метка, которая передает сигнал, фактически является другой меткой или обманывающее устройство может генерировать сигнал идентификации. Это, однако, значительно проще сделать с активными беспроводными устройствами радиоидентификации для больших расстояний, чем с близкими к линии обзора отражающими RFID устройствами. Использование сфокусированного RFID считывателя для короткого расстояния, с меткой RFID установленной на или в металл номерного знака, может также способствовать упрощению этого крайнего примера (этот тип верификация идентичности может, например, быть выполнен на пункте проверки остановки и движения, например, офицером-регулировщиком, использующим ручной RFID считыватель).
[0085] "Беспроводные" радиотехнологии (например, GSM, Bluetooth®, ZigBee®, Wi-Fi™, и т.д.) все больше используются для отслеживания транспортных средств, посредством отслеживания устройств в транспортном средстве, например, оставляющих руки свободными комплектов и/или мобильных телефонов, и для связи транспортных средств с придорожной полосой и транспортного средства с транспортным средством. Беспроводная связь обычно используется для того, чтобы понять маршруты транспортного средства относительно места расположения и других демографических показателей людей, например, для инфраструктуры и планирования трафика. Например, технологии беспроводной связи, основанные на мобильных телефонах, отслеживают телефоны людей в транспортных средствах. Использование беспроводной связи (а именно IEEE 802.11p или WAVE) направленно на дорожную безопасность и управление, направленное на транспортное средство "в реальном времени", например, используя локальность объекта, чтобы избежать области происшествия и/или для установления групп транспортных средств путешествующих вместе как целое. В последнем примере, идентичность транспортного средства не так важна и фактически, с точки зрения приватности, обнаружение идентичности транспортного средства может быть не желательно. (Идея подобна путешествию на автобусе: люди стоят в очереди, оплачивают и занимают места, но имена не требуются.)
[0086] Как упомянуто выше, беспроводная связь является технологией сравнительно больших расстояний. Следовательно, беспроводный приемник может быть способен обнаруживать и идентифицировать транспортное средство, но он не может знать, было ли транспортное средство не обнаружено. Может также существовать множество других сложностей, как проиллюстрировано в следующем примере. Предположим, что камера также оборудована (или связана с) беспроводным устройством, которое может беспроводно идентифицировать транспортное средство на расстоянии 100 метров. Такое беспроводное устройство может потенциально обнаруживать и идентифицировать транспортное средство где угодно на протяжении 200 м прямой дороги (то есть где угодно на 100 м в каждую сторону от устройства/камеры). Отметим, что на этих 200 м протяжения дороги могут быть множество, скажем, по 20 движущихся транспортных средств в ряду. Давайте также предположим, что диаграмма направленности излучения не колеблется. 200 метров протяженность дороги может быть помечено видимой краской или другими маркерами (для способствования обработке изображений выполняемой камерой - помеченная область является "видимой" камере). Сейчас пускай мы скажем, что одно из множества транспортных средств в помеченной области не отправляет беспроводно свою идентичность транспортного средства (ID). В этом случае (с идеалистическим допущением не колеблющейся диаграммы направленности излучения) система может знать (из того, что наблюдает камера), что присутствует одно транспортное средство, которое не передает свои ID, но она не может знать которое это из транспортных средств. Другими словами, здесь будет на одно беспроводно-получаемое ID транспортного средства меньше, чем здесь присутствует транспортных средств, видимых на камере в то же время, но система не может определить, которое из транспортных средств не передает свои ID. Система будет также не способна обнаружить транспортное средство, которое, например, едет слишком быстро, даже если камера может "увидеть" быстро двигающееся транспортное средство, поскольку беспроводное устройство дальнего расстояния не может определять которое из индивидуальных транспортных средств (из множества транспортных средств в помеченной области) является тем, что быстро двигается. Следовательно, в то время как камера может идентифицировать то, что здесь присутствует транспортное средство, которое двигается слишком быстро, даже с дополнительной способностью идентификации транспортных средств использующей технологию беспроводной связи, невозможно идентифицировать которое транспортное средство является тем, что превышает скорость, так, что уведомление о нарушении правил не может быть оформлено. Этот тип проблемы усугубляется, если взять во внимание, что в реальности диаграмма направленности излучения изменяется, и транспортные средства двигаются вокруг (меняют ряды, ускоряются или замедляются относительно друг друга, и т.д.). Технологии беспроводной связи, таким образом, не подходят для позитивной идентификации транспортного средства и дополнительно обсуждаться не будут.
[0087] RFID технология, а именно RFID технология пассивного отражения СВЧ, как описано ISO/IEC 18000-6С, считается более подходящей в применении для идентификации транспортного средства в настоящем контексте. Пассивное отражение RFID является, фактически, очень подобным во многих случаях радару (термин "РАДАР" взят из акронима радиообнаружение и определение расстояния). Радар естественно содержит радиосигнал передаваемый датчиком, который затем отражается наблюдаемым объектом и отраженный сигнал распознается датчиком. В случае RFID, сигнал считывателя, и "отраженный" сигнал (например, от метки RFID), модулируется для переноса информации между считывателем и меткой, и между меткой и считывателем, соответственно. Эффективная область считывания определяется точкой, в которой метка получает достаточно энергии от считывателя для включения и интеллектуальной связи со считывателем. Это тонкая грань из-за характера цифровой электроники.
[0088] Как упомянуто выше, RFID технология уже используется для идентификации транспортных средств при оплате и в применениях пропуска транспортных средств. Подразумевается, что способность RFID технологии обеспечивать хорошо определенное расстояние и эффективную область считывания в около одной длины транспортного средства может позволить обнаружение и идентификацию транспортного средства (использование RFID), и верификация идентичности транспортного средства (как определено использованием RFID) может выполняться при использовании (возможно среди прочего) обработки изображений для чтения номерного знака и/или "характерной особенности" (то есть другого изображения способствующего индикации транспортного средства) транспортного средства.
[0089] Фигура 5 иллюстрирует использование RFID считывателя, который расположен надземно или на наддорожной раме, для чтения метки RFID на транспортном средстве. (Фактически, Фигура 5 иллюстрирует надземный считыватель, считывающий метки, расположенные на ветровом стекле и номерном знаке транспортного средства). Диаграмма направленности излучения RFID считывателя изображенная на Фигуре 5 является узкой и хорошо определенной для снимка приблизительно одного транспортного средства. Камера, установленная на той же наддорожной раме, в подобном положении относительно RFID считывателя, может быть способна визуально определять (и создавать изображение) транспортного средства, которое не передает идентичность, или которое передает неправильную идентичность, чтобы помочь в идентификации транспортного средства, чего не может сделать RFID система.
[0090] Фигура 6 иллюстрирует случаи с надземным RFID считывателем и боковым считывателем, как видно до конца/вдоль дороги. Отметим, что обычно, боковой считыватель (то есть, считыватель, установленный сбоку от дороги) ограничивается обнаружением транспортных средств только в одном ряду, а именно ряду, ближайшему к считывателю. Это происходит, из-за технологических ограничений, максимальное надежное расстояние чтения RFID часто равно около 6 м. Следовательно, транспортные средства, перемещающиеся в следующем ряду, могут быть слишком удалены от бокового считывателя, чтобы надежно определяться. Другой фактор, который может влиять на это ограничение, заключается в том, что боковой считыватель может иметь трудности при определении транспортного средства в следующем ряду, если присутствует транспортное средство в соседнем ряду (то есть ряду ближайшему к считывателю), которое перекрывает обзор RFID следующего ряда. Следует также иметь в виду, что такая же проблема, а именно транспортное средство в следующем ряду перекрывается от обзора транспортным средством в ближнем ряду, то же влияет на установленные боковые камеры (то есть, камеры, установленные сбоку от дороги) и их способности изображать транспортные средства в более удаленных рядах.
[0091] Использование рамы для обеспечения поднятия над дорогой или верхнего расположения RFID считывателей, камеры, и т.д., может уменьшить или устранить проблемы, рассмотренные выше (связанные с перекрытием обзора), которые влияют на установленные сбоку считыватели/камеры. Однако наддорожная рама является фиксированной установкой, которая практически неизменно стоит большого количества денег, сначала для изготовления, но также для установки/размещения/сооружения и обслуживания (особенно если рассматривать персонал, оборудование, организацию, подготовку, перенаправление трафика, и т.д., требуемое для этого, и того, что может потребуется частично или полностью перекрыть дорогу на время установки, ремонта или обслуживания наддорожной рамы или любого установленного на ней оборудования). Соответственно, несмотря на некоторые преимущества верхних или наддорожных рам рассмотренных выше (например, разрешающих близкую к фронтальной обработку изображений, и т.д.), считается, что будет предпочтительно избежать или устранить необходимость в наддорожных рамах из-за стоимости, связанной с ними. Надцорожные рамы могут также оказаться существенно не подходящими для использования в случае применения при временном или быстром размещениях.
[0092] Другое возможное положение RFID считывателя это в или на поверхности дороги.
[0093] Фигура 7 иллюстрирует как расположения встроенного в дорогу считывателя (слева на Фигуре 7), так и расположение установленного на дорогу считывателя (справа на Фигуре 7) как видно далее, по тексту по Фигуре 8, иллюстрирующей расположение на дорогу видимое сбоку. Отметим, что обоих случаях существует чистая линия обзора между считывателем и номерным знаком транспортного средства (где предпочтительно будет расположена метка RFID). В связи с этим, вероятность того, что объект расположится (то есть создаст препятствие на линии обзора) между считывателем и номерным знаком/меткой в этих случаях расположения считывателя на дорогу и расположения в дорогу (учитывая ограниченное время доступное для этого пока транспортное средство/метка находится на расстоянии чтения считывателя) является крайне малой или незначительной. Также отметим, что малое расстояние требуется для чтения номерного знака. В этой связи, важно то, что из-за расстояний надежного считывания возможных с RFID технологиями, в общем, невозможно, например, двум транспортным средствам, перемещающимся одно за другим и обоим находиться на расстоянии считывания отдельного RFID считывателя в одно и то же время. В результате, отдельный RFID считыватель может быть способен только определять/идентифицировать одно транспортное средство, перемещающееся в данном направлении в данный момент времени, и это может быть выгодно, поскольку это может способствовать устранению или уменьшению проблемы, рассмотренной выше, например, при которой технология беспроводной связи способна определять/идентифицировать множество транспортных средств в данное время но не может идентифицировать индивидуальное транспортное средство (среди других), которое не передает свои ID. С RFID технологией, которая определяет одно транспортное средство в один момент времени, если транспортное средство обнаружено, но не передает свои ID (или предоставляет подозрительные ID), система может незамедлительно идентифицировать то, что это было ТО конкретное транспортное средство, которое не передавало свои ID (или предоставляло подозрительные ID).
[0094] Фигура 9 иллюстрирует датчик (то есть грубый прототип, использовавшийся для тестирования), который содержат и камеру и RFID считыватель, и который расположен на дороге, и транспортное средство, изображенное на расстоянии (4 м) от датчика. Фигура 10 иллюстрирует транспортное средство, показанное на Фигуре 9, но рассматриваемое с точки обзора камеры датчика (напомним, что датчик расположен на дороге), и транспортное средство снова на том же расстоянии (4 м) от датчика как на Фигуре 9. Фигура 11 такая же, как и Фигура 10 за исключением того, что демонстрирует транспортное средство на более коротком расстоянии (2 м) от датчика. Следует принять во внимание из Фигур 10 и 11 особенно то, что установленный на дорогу датчик, подобный показанному на Фигуре 9 (который содержит камеру также как и RFID считыватель), может быть способен обеспечивать четкость изображения передней части (и/или возможно задней части) проезжающего транспортного средства. Такие изображения могут, например, предоставлять достаточно информации для предоставления элементарных характерных особенностей фронта и/или тыла транспортного средства, что может способствовать, например, обнаружению случаев, в которых номерной знак был установлен на неправильное транспортное средство. Например, если RFID считыватель обнаруживает и идентифицирует транспортное средство и определяет идентичность транспортного средства (как определяется посредством RFID), соответствующую маленькому хэтчбэку, но изображение(я) с камеры с другой стороны демонстрирует, что номерной знак (и метка RFID на нем), от которого было сделано RFID обнаружение/идентификация, фактически установлен на большое полноприводное транспортное средство, то происходит немедленная (даже хотя бы элементарная) индикация номерного знака/метки, установленного на неправильное транспортное средство.
[0095] Фигура 12 иллюстрирует транспортное средство (а именно грузовик, видимый за маленьким фургоном в центральном ряду), которое пытается избежать идентификации, перемещаясь близко к транспортному средству впереди. Это является общеизвестным несоблюдением дистанции, и целью водителя несоблюдающего дистанцию является перемещение достаточно близко к транспортному средству впереди так, чтобы передний номерной знак на несоблюдающем дистанцию транспортном средстве был закрыт от обзора камеры (например, обычной верхней камеры или камеры установленной сбоку) транспортным средством впереди. Расстояние между транспортными средствами в центральном ряду по Фигуре 12 вероятно составляет между 2 м и 4 м, даже более вероятно два. Близость, на которой происходит несоблюдение дистанции (то есть, то насколько близко одно транспортное средство способно перемещаться за другим), обычно изменяется со скоростью. В сильно перегруженном медленном трафике, был зафиксирован 1 метр разделения. Это разделение преграждает обзор номерных знаков на несоблюдающем дистанцию транспортном средстве для обработки изображений, а также для RFID, верхними и установленными сбоку и камерами и RFID считывателями. Однако оно не будет загораживать обзор, и таким образом способность определять/идентифицировать номерной знак/метку (использование RFID), а также изображение номерного знака (использование камеры), установленным в дорогу или установленным на дорогу RFID считывателям или считывателю изображения (камере). Таким образом, здесь представляется очевидными преимущества установки датчика, который содержит RFID считыватель и предпочтительно также считыватель изображения (камеру), на или в поверхность дороги (как проиллюстрировано на Фигурах 7-9).
[0096] Фигура 13 демонстрирует номерной знак транспортного средства, который был установлен под скошенным вниз углом для уменьшения способности снятия изображения/чтения номерного знака используя верхнюю или установленную сбоку камеру. В основном, угол номерного знака на Фигуре 13 стремиться к тому, чтобы спрятать/прикрыть символы номерного знака от обзора камеры. Такое скошенное отклонение под углом номерного знака может также вызывать сложности, в случае, если номерной знак оборудован установленной на нем меткой RFID, для возможности установленного сверху или сбоку RFID считывателя считывать метки RFID на номерном знаке.
[0097] Следует принять во внимание, что скошенное вниз отклонение номерного знака, как проиллюстрировано на Фигуре 13, не препятствует возможности чтения/изображения номерного знака посредством камеры, установленной на или в дороге (подобно камере в датчике, показанном на Фигурах 7-9). С этой точки зрения, следует понимать, что для препятствования возможности установленной на дорогу или в дорогу камеры снимать изображение/читать номерной знак, номерной знак может быть альтернативно загнут лицевой стороной вверх. Это может действительно помешать возможности установленным на дорогу или в дорогу камерам снимать изображение/читать номерной знак. Однако независимо, установлена камера на/в дороге, она также обеспечена RFID считывателем (или здесь же есть соответствующий установленный на дорогу или установленный в дорогу RFID считыватель), и где номерной знак имеет установленную на нем метку RFID, RFID считыватель по прежнему не будет иметь сложности для связи с меткой RFID на номерном знаке. Это потому, что короткое расстояние чтения способствует обеспечению положительного считывания метки RFID. (Скошенный вверх угол может также улучшить способность считывания для не автоматических способов идентификации транспортных средств, таких как местный визуальный осмотр человеком).
[0098] Эффективность RFID считывания может подвергаться влиянию окружающей среды, статическим и динамическим факторам влияния.
[0099] Факторы влияния окружающей среды включают радиошум/помехи и погодные условия, которые могут заряжать воздух или приводить к появлению воды, грязи, льда, и т.д., на антеннах (это изменяет настройки антенны из-за их диэлектрических эффектов, и они также поглощают и рассеивают радиоэнергию). Обслуживание и питание для таких воздействий окружающей среды, в общем, рассматривается в большинстве RFID полей/приложений, и множество техник/стратегий было для этого создано. Влияния окружающей среды, и способ по которому они могут обслуживаться, таким образом, не нуждается в дополнительном рассмотрении здесь.
[00100] Направленные антенны с узкой апертурой стали де-факто стандартом при использовании RFID поскольку они уменьшают радиошум при фокусировании луча (излучения антенны) в области, предназначенной для считывания. Фигура 15 иллюстрирует диаграмму направленности излучения направленной антенны. Диаграмма направленности является отображением того как изменяется коэффициент усиления антенны в зависимости от направления. В Фигуре 15, 3 дБ ширина луча задает апертуру антенны. Каждые 3 дБ ослабления уменьшают вдвое чувствительность антенны и мощность сигнала. Антенна является наиболее чувствительной к сигналу от источника расположенного в этой апертуре. Поэтому следует понимать, что нежелательные сигналы (шумы) с внешней стороны апертуры антенны будут отфильтровываться от сигнала от метки, который находится в апертуре антенны. Необходимо отметить, что Фигура 15 относится к конструкции антенны, которая является классической полосковой и параболической (направленной) конструкцией используемой в связи точка-точка и RFID.
[00101] Фигура 16 является схематическим представлением типичной конструкции полосковой антенны. Важно отметить конструкцию такой классической направленной антенны по отношению к диаграмме направленности излучения. Диаграмма направленности излучения указывает в сторону от плоскости земли. Плоскость земли для СВЧ антенны используемой в идентификации транспортного средства обычно берется более чем 300 мм × 300 мм. Антенна должна устанавливаться вертикально для того, чтобы луч был направлен по дороге, что проблематично из-за размера конструкции, которая получается в результате.
[00102] На Фигуре 17, проиллюстрирован типичный номерной знак транспортного средства, и номерной знак содержит антенну метки RFID (антенна метки представлена в виде линии, которая видна в подчеркивании слова "safety" на номерном знаке). Продолговатый слот для размещения метки RFID и ее антенны также можно видеть на номерном знаке на Фигуре 14.
[00103] Фигура 17 иллюстрирует неоптимальный считыватель и ориентацию антенны метки по отношению к апертуре направленной антенны, что часто происходит с верхним и установленным сбоку RFID считывателями. Угол чтения для обеих - антенн метки и считывателя изменяется по мере проезда транспортного средства мимо считывателя. Количество энергии в эфире при неоптимальном угле антенны считывателя, и чувствительность антенны метки при неоптимальном угле, приводят к усугублению уменьшения эффективности считывания. Это весьма серьезная проблема, при которой антенна метки RFID находится на или в номерном знаке (как проиллюстрировано на Фигуре 17) и при которой RFID считыватель, используемый для чтения указанной метки, является верхним или установленным сбоку считывателем.
[00104] В качестве еще одного примера, Фигура 18 иллюстрирует (для номерного знака транспортного средства с меткой RFID на нем - подобно тому, что на Фигуре 17) как угол чтения изменяется при движении транспортного средства в случае чтения номерного знака с верхней RFID меткой. Фигура 18 иллюстрирует установку на высоте 6 м антенны считывателя, установленной под 45° к вертикали, направляя, таким образом, максимум усиления/мощности антенны в направлении точки, которая по горизонтали в 6 м напротив рамы. Когда номерной знак транспортного средства появляется в этой точке (6 м по горизонтали напротив рамы), антенна метки на нем получит эту мощность под углом около 45° (относительно к номерному знаку прямо в "фронтальном" направлении). Однако когда транспортное средство перемещается так, что его номерной знак находится всего в 1 м напротив рамы, угол траектории сигнала между считывателем и номерным знаком, следовательно, ориентируется под углом около 54,5° относительно плоскости считывателя (или 35,5° относительно луча перпендикулярного к плоскости считывателя), и траектория сигнала становится под углом около 80.5° относительно "фронтального" направления номерного знака. В результате менее чем половина радиомощности доступна для считывания метки, что означает уменьшение расстояния надежного считывания более чем вдвое. Этот пример демонстрирует, что из-за того как RFID метки устанавливаются на номерные знаки транспортных средств, могут быть проблемы связанные с чтением таких меток с использованием верхних RFID считывателей поскольку, из-за геометрии и используемых углов и ограниченного расстояния считывания связанного с RFID, метка RFID транспортного средства может быть надежно читаема только RFID считывателем (если это вообще возможно) в маленькой физической зоне/области перед расположенной сверху рамой, и в зависимости от скорости на которой перемещающиеся транспортное средство, это может или не может предоставлять достаточно времени для надежного чтения метки RFID (следует отметить, что определенное минимальное количество времени требуется для осуществления связи между меткой и считывателем, но количество времени, которое транспортное средство остается в маленькой зоне/области "считывания" перед рамой уменьшается с увеличением скорости транспортного средства). Этот вопрос рассмотрен дополнительно ниже со ссылками на Фигуру 20. Также может быть другая причина, почему может быть лучше устанавливать RFID считыватель на или в дороге, а не сверху, поскольку это располагает считыватель ближе к метке (на номерном знаке транспортного средства), а также при этом имеется меньше связанных с углами проблем, что означает то, что здесь может быть значительно большая зона/область вблизи считывателя, в которой метка может быть надежно считана. Это в свою очередь может способствовать улучшению способности считывания, и/или достижения увеличения максимальной скорости транспортного средства при которой станет невозможно чтение метки транспортного средства.
[00105] Статические факторы влияния также понижают эффективность RFID считывания. Установка метки RFID (радиоустройство на транспортном средстве) является примером статического влияния. Места установки на транспортном средстве, где могут устанавливаться метки RFID (логически) включают внутреннюю сторону ветрового стекла, на фаре и на или в номерном знаке. Установки на ветровом стекле и фаре демонстрируют схожую эффективность и пользовательские свойства. Таким образом, в целях этого рассмотрения, установки на фаре будут включены (то есть это будет рассматриваться как подобное или вариант) в установки на ветровое стекло (с подобными проблемами).
[00106] Установки метки в ветровое стекло (или фару) должны учитывать свойства стекла и формы корпуса. Также важно, что RFID метки, при установке в ветровые стекла (или фары) преимущественно устанавливаются неквалифицированными лицами, что дает в результате высокую несогласованность установок. Более того, металлические части транспортного средства могут деформировать/искривлять/усложнять радиочастотную диаграмму направленности излучения (как дополнительно рассмотрено ниже). Также, стекло, из-за его состава и толщины, демонстрирует широкое диэлектрическое рассеивание и может даже действовать как радиоэкран из-за тонирования и/или закалки. Места установок меток, таким образом, подвержены случайным и непредсказуемым влияниям на эффективность считывания.
[00107] Места установки меток на или в металлическом номерном знаке (подобного номерному знаку) может способствовать в значительной степени избеганию радиопомех от транспортного средства. Металлический номерной знак действует как плоскость, которая отражает луч от конструкции транспортного средства. Это особенно верно, если номерной знак установлен таким образом, что свободная линия обзора, как требуется большинством законодательных актов (по причине видимости), сохраняется для номерного знака (спереди и сзади). Фигура 19 демонстрирует номерной знак, установленный в полости для защиты его от повреждений. Эта установка не загораживает считывание номерного знака человеком, но верхние камера и RFID считыватель могут иметь проблемы со считыванием номерного знака.
[00108] В нормальных условиях, принимая во внимание радио-свойства, помехи и потерю данных, СВЧ RFID идентификации необходимо около 80 мс для надежного обмена 512 битами данных идентификации. 512 бит данных, как считается, должны быть достаточными данными для идентификации транспортного средства и осуществления элементарной офлайн-верификации этой идентичности. Транспортное средство, перемещающееся со скоростью 36 км/час, будет перемещаться на 0,8 м за 80 мс, а транспортное средство, перемещающееся со скоростью 180 км/час, будет перемещаться на 4 м.
[00109] Сообщения от текущих мест установки RFID предполагают эффективное расстояние идентификации транспортного средства между 6 м и 8 м. Это ограничивает использование мест установок придорожных RFID считывателей для идентификации транспортных средств, двигающихся в свободном потоке.
[00110] Верхние считыватели на рамах сегодня являются де-факто стандартом мест установок RFID считывателей для идентификации транспортных средств, двигающихся в свободном потоке. Типичная минимальная высота дорожного просвета для рамы составляет 6 м.
[00111] Фигура 20 иллюстрирует траекторию перемещения переднего и заднего номерных знаков 20-2 в апертуре 20-4 излучения верхнего RFID считывателя. В этом случае номерные знаки содержат установленную на них метку RFID. Антенна считывателя 20-1 устанавливается в 6 м над дорогой. Принимая во внимание траекторию 20-3 перемещения метки/номерного знака и ограничения эффективности RFID технологии считывания, требуется минимальное расстояние считывания (на неоптимальных углах номерного знака/метки/антенны) в 7,5 м для надежного считывания номерного знака. Это на пределе текущего надежного расстояние считывания RFID для этого приложения, как показано на Фигуре 20 дугами 7 м и 8 м и минимальной траекторией перемещения метки 20-5.
[00112] Фигура 21 иллюстрирует траекторию перемещения метки установленной в ветровое стекло 21-2 в апертуре 21-4 излучения верхнего RFID считывателя. Антенна считывателя 21-1 устанавливается в 6 м над дорогой. Следует отметить, что ориентация ветрового стекла транспортного средства может изменяться от вертикальной (что справедливо для грузовиков и автобусов) до почти горизонтальной (что справедливо для транспортных средств, таких как спортивные автомобили). Принимая во внимание диапазон возможных углов ветрового стекла, траектория перемещения метки 21-3 и ограничения эффективности технологии RFID считывания, требуется минимальное расстояние считывания (при неоптимальных углах метки/антенны) в 6,5 м для надежного считывания установленной в ветровое стекло метки. Также, принимая во внимание, что автобусы и грузовики скорее перемещаются на более низких скоростях, чем пассажирские транспортные средства, и нормально метка в их ветровых стеклах устанавливается выше, это уменьшает требование к расстоянию эффективного считывания до меньше 6 м. Это в пределах текущего расстояния надежного RFID считывания для этого приложения, как показано на Фигуре 21 дугами 6 м и 7 м и минимальной траекторией перемещения метки 21-5. Однако ветровое стекло в качестве места установки метки RFID считается неподходящим, по причинам, рассматриваемым ниже, при условии использования верхнего считывателя/рам.
[00113] Статические измерения подтверждают теоретическую превосходную эффективность считывания, достигаемую при установке RFID метки на ветровое стекло, при которой используются верхние RFID считыватели, если сравнивать (скажем) со случаем установления RFID метки в номерной знак с верхними RFID считывателями. Это является возможно неудивительным, поскольку установка метки RFID на ветровом стекле делает ее ближе к считывателю. Статические измерения показывают около 100% эффективности считывания при условии, что статические помехи и затраты пренебрегаются. Однако, эффективность считывания для существующих операций (практические реализации в реальном мире) составляет менее чем 98%. Это значение вероятно падает при увеличении скорости транспортных средств и плотности трафика.
[00114] Считается, что (как упомянуто выше) есть естественные недостатки, связанные с использованием мест установки RFID метки в ветровом стекле (или подобным образом установке в фаре) и с использованием верхних RFID считывателей для идентификации транспортных средств, особенно в приложениях свободного движения по открытым дорогам. Одна из этих причин рассматривается ниже со ссылкой на Фигуру 22.
[00115] Фигура 22 иллюстрирует некоторые факторы, влияющие на создание нелинейных изменений сигнала между антенной верхнего RFID считывателя и меткой RFID установленной на ветровое стекло, включая результат перемещения транспортного средства. Более конкретно, Фигура 22 иллюстрирует прямую траекторию сигнала 22-4 между антенной верхнего RFID считывателя 22-1 и меткой RFID установленной на ветровое стекло 22-2, вместе с множеством факторов, которые влияют на создание нелинейности связанной с прямой траекторией сигнала. Сначала, перемещение транспортного средства в направлении верхней рамы, на которой установлен считыватель 22-1, вызывает сокращение длины прямой траектории сигнала 22-4, как показано 22-5. Сокращение прямой траектории сигнала, фактически, изменяется как функция тангенса (Tan) угла траектории сигнала, и это приводит к квадратному (нелинейному) тангенциальному смещению, которое связано со скоростью транспортного средства и отраженного сигнала несущей волны. Этот эффект возможно может быть отработан, по меньшей мере в некоторой степени, при использовании коротких длин пакетов данных разрешая быструю временную синхронизацию сигнала. Это может быть эффективно, если получаемый сигнал предсказуем в поведении и представляет один источник. Однако, дополнительно к сокращению траектории сигнала и эффектов, вызываемых этим (только что рассмотрено), металлические поверхности и края корпуса транспортного средства действуют как практически идеальные отражатели создающие множество других практически идеальных (но несколько не в фазе) траекторий отраженных сигналов 22-3. Объединение множества траекторий отраженных сигналов 22-3 (которые, по сути, непредсказуемы из-за различий ветровых стекол транспортных средств и типов корпусов, а также имея в виду, что каждая из этих отраженных траекторий 22-3 также подвержена сокращению траектории сигнала и с этим связанным проблемам) приводит к общему/фактическому сигналу, причем который содержит множество изменяющихся сигналов, каждый из которых имеет экспоненциальное (нелинейное) тангенциальное смещение. Это дает в результате сигнал с непредсказуемыми шумами сигнала, но в котором шум подобен природе реального сигнала (что еще хуже, и более сложно отфильтровать, чем несвязанный фоновый шум или подобное). Возникновение этих сильно вредящих изменений сигнала зависит от ориентации метки-считывателя, места установки метки, конструкции транспортного средства, скорости транспортного средства и других отражателей (транспортных средств) поблизости. Должно быть понятно, что смягчения этой проблемы множества нелинейных траекторий очень сложно достичь, особенно если транспортное средство двигается на высокой скорости.
[00116] Датчики, которые располагаются на или в дороге, были ранее предложены и использовались, однако предшествующее их использование было отклонено из-за вопросов, связанных с, например, сложностью получения безопасного доступа для персонала для обслуживания установленных на дорогу или установленных в дорогу датчиков, потенциальных повреждений целостности поверхности дороги из-за установки датчиков в дорогу, нежелательная необходимость (по меньшей мере частично) перекрытия дороги на время установки, ремонта или обслуживания датчиков, и т.д. Установленные в/на дорогу датчики также требуют борьбы с вибрациями дороги, воздействием ударов колес и дорожных жидкостей, грязи, загрязняющих веществ, и т.д. Тем не менее, считается, что подходящая конструкция для такого устанавливаемого на дорогу или устанавливаемого в дорогу датчика, который устраняет или по меньшей мере уменьшает эти проблемы, в некоторой степени, является выполнимой. Например, размер, формат, мощность питания и связи датчика могут выбираться и комбинироваться так, чтобы минимизировать влияние на дорогу и на время установки устройства. В то же время конструкция может обеспечивать долговечность и простоту обслуживания устройства на/в дороге.
[00117] По причинам, которые были ранее рассмотрены, место установки на/в дорогу является значительно более предпочтительным местом установки для RFID считывателя, особенно если метка находится на части номерного знака транспортного средства (что также считается также очень предпочтительным). Одной из причин, почему используется установленный в/на дорогу RFID считыватель и RFID метки, располагаемые на номерных знаках транспортного средства, это то, что проблема множества траекторий (как рассмотрено выше со ссылками на Фигуру 22) может быть значительно ослаблена, поскольку реальными отражателями, которые могут отражать сигнал между установленным в/на дорогу считывателем и установленной на номерном знаке меткой, является только собственно дорога и другие транспортные средства в прилегающем ряду. Дорога является слабым отражателем, который стремится к рассеиванию сигнала (а не производит гораздо более проблематичные почти совершенные, немного не в фазе отражения). Множество траекторий отражений прилегающих транспортных средств обычно отражают первый порядок тангенциального поведения, которое может быть относительно просто отфильтровано.
[00118] Фигура 23 иллюстрирует требуемую (или по меньшей мере желаемую) RFID диаграмму направленности излучения 23-4 для антенны считывателя 23-1 который устанавливается в/на дороге. Следует отметить, что диаграмма направленности излучения несколько низкая и широкая/плоская относительно высоты транспортного средства и направления перемещения (различие между диаграммами направленности излучения с левой стороны и с правой стороны соответственно на Фигуре 24). Метка RFID 23-2 устанавливается в или на передний и/или задний номерной знак транспортного средства и дает в результате потенциальную траекторию перемещения 23-3, которая обычно является промежутком между около 200 мм и около 1200 мм над поверхностью дороги (то есть, независимо от типа транспортного средства, например автомобиля, грузовика, автобуса, мотоцикла, и т.д., его номерной знак, с установленной на нем меткой RFID, будет обычно проходить через эту область 23-3, который находится от 200 до 1200 мм над землей, при прохождении транспортного средства считывателя). Специалист в данной области техники оценит, из Фигуры 23, как место установки в/на дорогу может устранить или по меньшей мере уменьшить проблемы считывания связанные с малыми дистанциями следования, не соблюдением дистанции, и т.д. На Фигуре 23, проиллюстрирован промежуток между транспортными средствами в 4 м.
[00119] Хотя место установки в/на дорогу считается более предпочтительным местом установки для RFID считывателя, особенно если метка находится на или части номерного знака транспортного средства (который также считается очень предпочтительным), тем не менее, установленные в/на дорогу RFID считыватели также имеют определенные радиопроблемы.
[00120] Фигура 24 иллюстрирует классическую диаграмму направленности излучения полосковой антенны 24-2, и широкую плоскую диаграмму направленности излучения 24-3, соответственно, как излученной из установленного в/на дорогу считывателя 24-1. Металлическая поверхность под транспортным средством является отражателем, и она близка к антенне считывателя, и это может приводить к отражению энергии ослепления, которая, в случае классической полосковой антенны, будет очень высока (как отображено количеством показанной энергии в области 24-6 на Фигуре 24). Широкая плоская диаграмма направленности излучения может значительно способствовать уменьшению этой отраженной энергии (как отображено количеством показанной энергии на эквивалентной области 24-5 на Фигуре 24). Это является одной из причин, почему широкая плоская диаграмма направленности излучения, и антенна, которая может обеспечить это, могут быть предпочтительными.
[00121] Плоская диаграмма направленности излучения может быть получена вращением классической направленной антенны (подобно проиллюстрированной на Фигуре 15) по ее боковой стороне. Однако это может привести к конструкции на дороге, которая может быть (обычно) около 300 мм в высоту и ширину. Такая конструкция очевидно не реальна для использования на дороге, поскольку будет загораживать трафик и будет, скорее всего, разбита первым столкнувшимся с ней транспортным средством (не говоря уже об ущербе, причиненному транспортному средству, потенциальных травмах от несчастного случая и т.д.). Более низкие структуры могут быть достигнуты при использовании, например, конструкций щелевых антенн. Эти конструкции, однако, также считаются неподходящими из-за эффекта подстилающей земли, который изменяется по мере того как плоскость земли становится более или менее проводящей из-за конструктивных материалов и влаги. Типичное воздействие эффекта подстилающей земли состоит в выталкивании направления максимального усиления вверх. Фигура 25 иллюстрирует диаграмму направленности излучения выталкиваемого вверх, из-за эффекта подстилающей земли. Этот эффект присутствует если, например, металлическое армирование содержится на дороге и/или проводящие жидкости находятся на или в поверхности дороги. На Фигуре 25, антенна считывателя 25-1 устанавливаемая на дорогу дает в результате вертикальную конструкцию. Траектория максимального усиления 25-3 выталкивается вверх, в этом случае на 30 градусов, хотя типичные значения более чем 30 градусов. Узкая апертура диаграммы направленности излучения 25-4 не передает достаточно энергии в потенциальную траекторию перемещения метки номерного знака 25-2. Апертура может быть расширена 25-5, но затем направленная кверху энергия становится проблемой (как рассмотрено выше со ссылкой на Фигуру 24).
[00122] Другой тип антенны это дипольная антенна. Дипольные антенны, в общем, и их свойства хорошо понятны и таким образом не нуждаются здесь в представлении или подробном рассмотрении. Фигура 26 иллюстрирует диаграмму направленности излучения типичной вертикальной дипольной антенны в свободном пространстве. Стандартная дипольная антенна (которая обычно является антенной с двумя концами, состоящей из двух прямых проводящих элементов, сориентированных впритык на одной и той же оси) может, однако, не идеально подходить для применения на/в дороге в настоящем контексте, особенно данного диапазона частот, обычно используемого для этого, поскольку если такая дипольная антенна будет ориентирована вертикально, она может выдвигаться слишком высоко над поверхностью дороги чтобы быть подходящей для использования на/в дороге.
[00123] Фигура 27 демонстрирует расчетную диаграмму направленности излучения антенны которая сконструирована для обеспечения диаграммы направленности излучения в общем подобной форме диаграммы направленности излучения вертикальной дипольной антенны. Такая антенна может упоминаться (заметим: что только для удобства ссылок) как "адаптированная дипольная" антенна. Термин "адаптированная дипольная" антенна может таким образом относиться к указанной антенне, которая адаптирована/выполнена для обеспечения диаграммы направленности излучения, в общем, подобной форме диаграммы направленности излучения вертикальной дипольной антенны (или возможно подобной но несколько более широкой более плоской формы), даже хотя фактическая конструкция и строение антенны собственно может отличаться (возможно значительно или полностью) от традиционной дипольной антенны. Обратимся снова к Фигуре 27, это фактически демонстрируется диаграмма направленности излучения адаптированной дипольной антенны (смотри значение выше) которая устанавливается на или в дорогу так, что ее центральный отвод/точка фидера находится на уровне с поверхностью дороги. Это диаграмма направленности излучения антенны, которая может подходить (возможно даже идеально) для считывания RFID меток на номерных знаках транспортных средств. Отметим, что эта диаграмма направленности излучения достаточно широка и плоская, и расположена на или сразу над поверхностью дороги. Более конкретно, диаграмма направленности излучения антенны в Фигуре 27 имеет широкую и низкую (плоскую) в общем тороидальную форму. Или, чтобы представить другой способ, форма диаграммы направленности излучения антенны в Фигуре 27 представляет широкий низкий эллиптический торо (подобный форме пончика, который был брошен на землю и раздавлен/придавлен до некоторой степени). Детали адаптации/перестройки конструкции антенны для, например, обеспечения желаемой диаграммы направленности излучения антенны (и как это может быть сделано) будут знакомы специалисту в этой области, и таким образом нет необходимости рассматривать это подробно. Использование этих техник, может быть предпочтительно для обеспечения адаптированной дипольной антенны сконструированной для установки на/в дороге и которая может предоставить желаемую диаграмму направленности излучения. Адаптированная дипольная антенна, сконструированная для установки на/в дороге и которая обеспечивает диаграмму направленности излучения такой же формы как (или подобной) как показано на Фигуре 27 (или 23-4, или 24-3, и т.д.), является одним из примеров такой антенны, которая может быть подходящей или идеальной.
[00124] Адаптированная дипольная антенна, при установке упомянутым выше способом, будет независима от направления в плоскости поверхности дороги. То есть, RFID метки будут считываться одинаково хорошо при приближении к антенне со всех направлений. Это может быть выгодно, скажем, на перекрестках дорог (где транспортные средства могут проезжать антенну с разных направлений) и/или где требуется быстрая установка антенн без необходимости настройки антенн, только соответствующее удаление, где используется множество антенн/датчиков.
[00125] Традиционная дипольная антенна эмитирует линейный поляризованный сигнал, для которого необходима метка (то есть, метка на номерном знаке транспортного средства) для "отражения" сигнала (или продуцирования модулированного сигнала ответа/отклика) с такой же поляризацией. RFID предварительно был разработан (например, для применения в логистике), где поляризация не является предсказуемой или зафиксированной в операциях. Отражения также изменяют направление поляризации. Тем не менее, ранее было предпочтение, в области RFID, использовать антенны с круговой поляризацией. Однако, номерной знак транспортного средства, содержащий метку RFID (и ее антенну), является весьма предсказуемым с точки зрения его монтажа и конструкции. Предшествующие предложения рассматривали RFID номерной знак транспортного средства, использующий щелевую вертикально поляризованную антенну. Это может быть подходящим соответствием для адаптированной дипольной антенны в дороге. Подобным образом, предшествующие предложения имеют определенные [близкие к] конструкции линейно поляризованных устанавливаемых на металл меток RFID, которые могут устанавливаться вертикально на номерной знак транспортного средства.
[00126] Фигура 28 иллюстрирует область считывания для транспортного средства, оборудованного номерным знаком адаптированного для RFID. Ряд имеет ширину 4 м с областью считывания начинающейся в 5 м до антенны считывателя и заканчивающейся в 5 м за антенной считывателя (считыватель в этом случае располагается в центре ряда дороги на отмеченной 0 м точке). Пространство от 1 м до и до 1 м за антенной считывателя исключается в попытке уменьшения эффекта ослепления (рассмотрен выше со ссылкой на Фигуру 24), а также из-за проблем считывания под углом, которые могут возникнуть в этой области особенно для транспортных средств (и их номерных знаков) которые проезжают поблизости края ряда (а не прямо по центру ряда ровно по прямой с датчиком).
[00127] Фигура 29 это, фактически, схематическое представление того, что изображено на Фигуре 28. Таким образом, Фигура 29 демонстрирует ориентацию метки номерного знака в области считывания установленного в/на дорогу RFID считывателя или камеры. На Фигуре 29, Lx в обоих случаях ограничено из-за интервалов следованиятранспортных средств. Типичные значения для параметров по Фигуре 29 такие: L равно 1 м, Lx равно 4 м, Ly равно 2 м и h находится в диапазоне от 200 мм до 1200 мм. Эффективность системы считывания является функцией угля считывания метки номерного знака и угла считывания антенны считывателя.
[00128] Фигура 30 иллюстрирует эффективную область считывания 30-5 для метки RFID 30-4 на номерном знаке транспортного средства, при использовании установленного в/на дорогу RFID считывателя с адаптированной дипольной антенной 30-1. Требуемая область считывания 30-7, основанная на траектории перемещения 30-3 транспортного средства, типично покрывает максимальную ширину ряда в 4 м и требуемые 4 м траектории перемещения в луче. Диаграмма направленности излучения считывателя (широкая и плоская) в форме "пончика" показана на Фигура 30 кругом обозначенным 30-2, однако будет понятно, что это диаграмма направленности излучения 30-2 (которая выглядит как круг на Фигуре 30) являющаяся фактически лучом в форме пончика/тороида как показано на Фигуре 27 (или 23-4, или 24-3, и т.д.). В любом случае, диаграмма направленности излучения считывателя в форме пончика 30-2, с фронтальным расстоянием считывания около 6 м, объединенная с эффектом угла чтения 30-6 на метке номерного знака, дает в результате проиллюстрированную эффективную область считывания 30-5. Как показано на Фигуре 30, область эффективного считывания 30-5 грубо является в форме "фигуры 8", с центром фигуры 8 расположенной в месте установки считывателя 30-1 и два лепестка "Фигуры 8" на каждой ее стороне в направлении дороги. (Следует, конечно, отметить, что адаптированная дипольная антенна 30-1 является ненаправленной и таким образом ориентация эффективной области считывания в форме "фигуры 8" 30-5 - то есть, в линию с направлением перемещения транспортного средства возникает из-за геометрии требуемых областей считывания 30-7, и сходимость лепестков фигуры 8 около считывателя возникает из-за проблем угла чтения. Эти факторы касающиеся ориентации эффективной области считывания в форме "фигуры 8" 30-5 не являются, тем не менее, результатом конструкции/конфигурации собственно антенны 30-1).
[00129] Фигура 31 иллюстрирует пример использования отдельного или множества RFID считывателей, каждый из которых использует адаптированную дипольную антенну считывателя 31-1, или их множество, с получающейся в результате эффективной областью считывания 31-2, в различных вариантах считывания. Показана потенциальная траектория перемещения метки номерного знака 31-3, на основании того как транспортное средство физически может перемещаться, на каждом из различных типов дороги. Все ряды дороги в этих примерах 3 м шириной, что является средним показателем для многих дорожных полос. Двунаправленная (одна проезжая часть) узкая дорога 31 -4 примерно 6 м в ширину может быть покрыта отдельным считывателем который будет считывать транспортные средства в обоих направлениях (это является примером, данным в верхнем левом углу Фигуры 31). А дорога с обочиной, или широкой обочиной 31-5 (наличие обочины увеличивает ширину области в которой транспортное средство может перемещаться) может однако часто нуждаться в двух считывателях (как проиллюстрировано на верхнем среднем примере по Фигуре 31). Четырехрядная однонаправленная дорога с обочинами 31-6 может нуждаться в трех считывателях (как проиллюстрировано на нижнем левом примере на Фигуре 31). Перекресток дороги двух узких дорог 31-7 может потенциально требовать только один считыватель, хотя перекресток узкой дороги с дорогой имеющей более широкие обочины может требовать два считывателя (поэтому последнее проиллюстрировано на примере с правой стороны на Фигуре 31).
[00130] Фигура 32 иллюстрирует, с левой стороны, расположение множества (в этом случае трех) считывателей расположенных по многорядной дороге. В примере слева по Фигуре 32, соответствующие лучи каждого индивидуального считывателя используют различные радиочастоты 32-1, и таким образом каждое осуществляет обнаружение/идентификацию и т.д. транспортных средств независимо от других. Напротив, с правой стороны в Фигуре 32, проиллюстрирован пример, где множество считывателей связываются друг с другом, используя способы радио и данных для "фазовой автоподстройки" набора считывателей, в линию, для формирования (в результате) отдельного луча, так если бы указанный отдельный луч был эмитирован фазированной антенной решеткой. Радиочастотные интервалы могут иметь тенденцию быть меньшими в последнем примере, хотя фазовая синхронизация, соответствующая считывателю, может более сложно достигаться, чем просто иметь отдельные, независимо управляемые считыватели.
[00131] Фигура 33 предназначена для отображения использования множества датчиков (каждый из которых имеет установленную на дорогу адаптированную дипольную антенну считывателя 33-1) при создании кордона для транспортных средств вокруг точки интереса. В этом примере, установка может быть быстрой установкой после происшествия или запланированного кордона для контроля доступа транспортных средств для события. Можно использовать датчики, каждый из которых является маленьким, портативным узлом, которые могут просто транспортироваться и временно устанавливаться на желаемых местах установки на одной или более дорог.
[00132] Размещение устройства в дороге (в отличие от размещения на дороге) может иметь несколько связанных вызовов. Например, размер устройства должен быть такой, чтобы поддерживать (и не подкапывать) целостность дороги, особенно основы дороги. Устройство должно также быть способно выдерживать удар колесом и вибрации, опасность от которых связана (по меньшей мере частично) с размером устройства. Проводка к устройству (например, для подачи питания на устройство и/или для связи с устройством) может также требовать прорезания линий/штроб в дороге так, чтобы в них можно было уложить кабеля. Эти кабеля могут также быть субъектами электрического шума и пиков мощности. Время для установки и/или обслуживания устройства, или связанных кабелей, и т.д., в существующей дороге может таким образом представлять проблемы для стоимости и трафика. Существуют также вызовы связанные с расположением устройства на дороге (в отличие от в дороге). Например, устройство устанавливаемое на дороге должно быть достаточно низким, чтобы транспортные средства перемещались над ним безопасно, включая то, что колеса транспортного средства проедут прямо по верху устройства. Кабеля к устройству могут также являться проблемой поскольку часто могут не зарываться (то есть они могут быть на земле/поверхности дороги) и транспортные средства могут проезжать по ним и установка таких кабелей также может занять время. Также могут быть сложности связанные с обслуживанием устройства в предназначенных положениях на дороге. Тем не менее, считается, что эти вызовы, связанные с местами установки в дорогу и установки на дорогу могут не быть непреодолимы.
[00133] С учетом вышеизложенного предусматривается, что варианты реализации изобретения могут работать, используя, или совместно с одним, или в комбинации, следующего (и специалист в данной области легко оценит связанные свойства и преимущества каждого варианта):
- RFID технологию для чтения RFID меток, которые располагаются на или в номерных знаках транспортного средства, используя установленную на дорогу или установленную в дорогу адаптированную дипольную антенну считывателя;
- камеры движения для наблюдения поведения транспортного средства и/или отслеживания транспортных средств как объектов изображения;
- установленный на дорогу или установленный в дорогу обработчик неподвижных изображений с фиксированным фокусом (используя видимый и/или невидимый свет) для автоматического распознавания номерных знаков (ANPR), распознавание другой символики (например, штрих-кодов), идентификация характерных особенностей изображения транспортного средства или другой идентификации на основании изображений, и т.д. (Отметим, что использование камер обработчиков неподвижных изображений с фиксированным фокусом или подобного может не только позволить использовать ANPR и/или другие технологии распознания/чтения на основании изображений, но это может также способствовать значительному уменьшению технологической сложности и следовательно стоимости установки. Например, предусматривая камеры способные получать неподвижные изображения только на определенных фиксированных расстояниях (например, когда транспортное средство находится на 4 м от камеры и 2 м от камеры, как проиллюстрировано на Фигурах 10 и 11, и/или изображения тыла транспортного средства после того как транспортное средство переместилось на 2 м и 4 м за камеру), камеры могут обеспечивать ANPR и т.д. без необходимости сложной фокусировочной функциональности изображения. Таким образом, стоимость используемой камеры (или другого устройства обработки изображений) может быть значительно уменьшена);
- лазерное и радарное обнаружение транспортных средств, обнаружение положения транспортного средства и обнаружение скорости транспортного средства. (По отношению к радару, предусматривается, что информация радара (например, эффективная отражающая поверхность) может также получаться при использовании технологии изменяемого/дифференциального радара, основанное на (и использовании) факте, что транспортное средство проходит скажем фиксированное/известное расстояние (например, от 5 м до 2 м перед датчиком, и от 2 м до 5 м после датчика) для получения радарной информации);
- радио-передачи данных; и
- RFID и радио для синхронизации установок с множеством считывателей.
[00134] Изобретение по меньшей мере в некоторых вариантах реализации изобретения, может таким образом быть пригодным для помощи в обеспечении того, что номерной знак транспортного средства действительно законно представляет наблюдаемое транспортное средство к которому он прикреплен. Варианты реализации изобретения могут также комбинировать технологии способом, при котором точное обнаружение идентичности транспортного средства и его поведения, и верификация идентичности такого транспортного средства, может достигаться, чтобы разрешать немедленное вмешательство. Это может предпочтительно быть сделано с достаточной частотой, чтобы способствовать и поддерживать доверие к номерным знакам транспортного средства (как индикации идентичности транспортного средства), и считается, что изобретение (в некоторых вариантах реализации изобретения) может также использоваться для помощи в обеспечении точной информации для планирования дорог и управления трафиком.
[00135] В виду этого, считается предпочтительным, если устройства, приборы, системы, и т.д., в соответствии с (по меньшей мере некоторыми вариантами реализации) изобретением будут приспособлены для быстрой/скорой установки, со сравнительно низкой стоимостью (как с точки зрения начального производства и установки/размещения, и последующего обслуживания).
[00136] Варианты реализации настоящего изобретения могут способствовать улучшению эффективности идентификации/верификации транспортных средств, и обнаружения поведения транспортного средства, устраняя недостатки (некоторые из которых рассмотрены выше) связанные с технологиями и системами, которые ранее для этого использовались. Особое внимание может быть обращено на обнаружение и изоляцию транспортных средств, которые не могут быть идентифицированы, или которые ведут себя не нормально относительно текущего трафика и правил дорожного движения, на отслеживаемой протяженности дороги, позволяя полиции действовать после такого обнаружения.
[00137] Возможная реализация конкретной системы, и устройства используемые здесь будут сейчас рассмотрены.
[00138] Фигура 34 иллюстрирует типичный случай, в котором используется указанная система. Для объяснения этой реализации системы, установка ряда устанавливаемых в/на дорогу RFID устройств/считывателей (каждый из которых может содержать камеру) в данной точке будет упоминаться как дорожный барьер 34-3. Отметим, что в некоторых случаях дорожный барьер может состоять из отдельного установленного в/на дорогу RFID устройства/считывателя (который может содержать камеру). Станция дорожного барьера 34-6 является фиксированной установкой или временной установкой. Станция дорожного барьера содержит по меньшей мере дорожный барьер 34-3, и средства для обеспечения дорожного барьера 34-3 связью с удаленной системой управления 34-1 и с другими станция дорожного барьера и/или полицейскими транспортными средствами 34-4 поблизости. Станция дорожного барьера 34-6 обычно также содержит камеру движения 34-2 и не обязательно метеостанцию 34-8. Метеостанция 34-8 (если есть в наличии) отправляет сводки погоды и качества воздуха системе управления 34-1 для целей управления трафиком и аварийнй обстановки. Контроллер дорожного барьера 34-7 (который также является обычной частью станции дорожного барьера 34-6) использует данные погоды, информацию от других станций дорожных барьеров до него и после него по дороге, данные от системы управления 34-1 и от его локального дорожного барьера 34-3 и от его камеры движения 34-2, для определения идентичности транспортного средства и ненормальности поведения и/или потенциального риска происшествия. Примеры таких ненормальностей включают: поведение транспортного средства которое показывает управление под действием одурманивающих веществ или усталости; перегруженный грузовик; транспортное средство которое невозможно идентифицировать или проверить идентичность; транспортное средство идентифицированное как находящееся в списке подозреваемых, как выдано системой управления 34-1; и т.д. Станция дорожного барьера 34-6 передает свои наблюдения до нее и после нее по дороге, используя локальную дорожную сеть (RAN) 34-5, следующей и предшествующей станциям дорожных барьеров 34-6, системе управления 34-1 и/или полицейским транспортным средствам, связанным со станциями дорожных барьеров (или с любой из них).
[00139] Оценка, предоставляемая станцией дорожного барьера 34-6, может таким образом содержать (по меньшей мере) поведение транспортного средства и ненормальности идентификации. Наблюдения могут быть отправлены следующей станции дорожного барьера, которую может проехать транспортное средство. Таким образом, транспортное средство с ненормальностью может быть отслежено, даже если оно не идентифицировано положительно или вообще не идентифицировано. Неидентифицированное транспортное средство может обнаруживаться по отсутствию идентификации и/или характерной особенности как определено камерой движения и/или камерами дорожного барьера. Следующая станция дорожного барьера может попытаться скорректировать ненормальность. Если ненормальность повторяется, тогда ненормальность может обостриться до экстренности. Полицейское транспортное средство, связанное с любой из станций дорожных барьеров, через которые может проезжать транспортное средство, могут быть предупреждены о ненормальности. Эти полицейские транспортные средства могут затем запросить информацию о ненормальности, которая может содержать изображения и видео, позволяющие им выполнить вмешательство.
[00140] В конечном итоге, в представленной выше реализации системы, станция дорожного барьера содержит по меньшей мере ряд считывателей дорожного барьера (конечно снова отметим, что ряд может иногда содержать лишь один считыватель) и придорожный контроллер 34-7.
[00141] Считыватель/устройство дорожного барьера может быть использовано в или на дороге. Для как установленного на дорогу, так и установленного в дорогу, формат/конструкция и конструкция считывателя должны предпочтительно способствовать быстрой установке. Обслуживание может предпочтительно включать простую замену одного устройства другим на месте (чтобы избежать срывов, и т.д., связанных с попытками ремонта/обслуживания устройства находясь на месте). Конечно, устройство которое удалено или "отключено" может быть забрано с места для обслуживания или ремонта до возвращения в работу.
[00142] Напомним, что дорожный барьер может содержать множество RFID считывателей. Каждый считыватель дорожного барьера использует адаптированную дипольную антенну с диаграммой направленности излучения в форме "пончика" для определения и (если возможно) позитивной идентификации транспортного средства с номерным знаком, оборудованным RFID меткой, в поле от 1 м до 5 м до нее и после нее на полосе шириной 4 м на эффективной высоте 1,2 м.
[00143] Каждый считыватель дорожного барьера может (предпочтительно) содержать RFID/радарную способность и логический узел, чтобы быть способным:
- обнаруживать транспортное средство с или без работающей метки;
- считывать метки;
- определять скорость и положение транспортного средства;
- определять длину транспортного средства, а также и вычислять количество осей;
- генерировать характерные особенности радиоизлучения транспортного средства используя (в частности) перемещение радарной эффективной отражающей поверхности транспортного средства;
- синхронизировать его излучение с прилегающими считывателями дорожного барьера, используя как обнаруженные боковые лучи, так и придорожный контроллер, таким образом, достигая частотного разделения или фазовой синхронизации с целью заполнения промежутков между прилегающими лучами, где транспортное средство может передвигаться незамеченным; и
- формировать диаграмму направленности излучения динамически (адаптивное формирование излучения) поскольку среда места установки изменяется из-за погоды и других оказывающих влияние радиочастотных факторов.
[00144] Каждый считыватель дорожного барьера может содержать компонент связи беспроводной передачи данных для связи с придорожным контроллером. Каждый считыватель дорожного барьера может также содержать ряд фотокамер с фиксированным фокусом для формирования изображения передней и тыльной части транспортного средства. Камеры могут также использоваться для определения скорости транспортного средства, длины, ширины, положения в ряду, расстояние следования, наклона корпуса и количество осей. Изображения могут отправляться контроллеру для определения"ANPR" номерного знака, характерной особенности транспортного средства и/или считывания символов идентификации, то есть штрих-кодов на номерном знаке и/или транспортном средстве. Каждый считыватель дорожного барьера может также содержать различные другие датчики, например вибрации, удара, температуры, и т.д., способствуя его функциям. Считыватель дорожного барьера может также содержать светодиодные индикаторы для обеспечения понятной человеку обратной связи о его функциональном статусе.
[00145] Придорожный контроллер, который может также устанавливаться в транспортное средство (например, полицейский автомобиль), получает данные от считывателей (возможно по беспроводной связи), также как и изображения от камеры движения и информацию от других датчиков, например датчиков погоды. Эта информация используется для обнаружения транспортного средства, идентификации, верификации идентичности и наблюдения за поведением, что может приводить к идентификации ненормальности транспортного средства. Эта информация может также использоваться для доступа к условиям трафика. Придорожный контроллер может связываться с рядом считывателей (дорожный барьер) для поддержки синхронизации луча. Придорожный контроллер может также связываться с другими контроллерами до него и после него по дороге и/или с системой управления для сбора данных в поддержку подтверждения, перенаправления и передача по инстанции аномалий и условий трафика. Придорожный контроллер может передавать информацию на полицейское транспортное средство, подключенное к нему, без запроса или по требованию, побуждая и/или поддерживая придорожное вмешательство.
[00146] Логический узел придорожного контроллера может связывать RFID данные с транспортными средствами на изображениях и видео потоках; определять классификацию и тип транспортного средства; осуществлять автоматическое распознание номерного знака (ANPR) по изображению, полученному от считывателя; определять ненормальности движения, идентифицировать транспортные средства, связанные с ненормальностями движения; и обрабатывать, предупреждать и воспринимать ненормальности движения и поведения транспортного средства.
[00147] Фигура 35 и Фигура 36 иллюстрируют предпочительные вариант(ы) реализации изобретения и мест(а) установки определенных системных компонентов. Установленный в дорогу считыватель 35/36-12 установлен в полости в дороге. Установленный на дорогу считыватель 35/36-11, устанавливается в передвижной "лежачий полицейский", временно устанавливаемый на дорогу 35-10. Считыватель устанавливается в положение, в котором транспортное средство будет проезжать над ним или близко к нему. Для широких дорог (или широких подъездных путей, и т.д.) ряд из двух или более считывателей устанавливается в линию пересекая дорогу/подъездной путь, обеспечивая что все транспортные средства, проезжающие по этому подъездному пути/дороге, будут определены.. Данные записанные датчиками считывателя (RFID с обработкой изображений, вибрацией, ударом и/или радаром) передаются в придорожный контроллер 35/36-3, возможно используя технологии беспроводной радиосвязи 35/36-7. Контроллер 35/36-3 собирает дополнительную информацию от других датчиков, например, камеры движения 35-4, облачных сервисов 35-5 и других контроллеров до него или после него по дороге. Контроллер использует эту информацию для непрерывного определения ненормальностей идентификации и поведения транспортных средств, а также и условий дороги движения. Ненормальности и условия движения передаются по линии связи другим контроллерам. Линия связи взаимно связанных контроллеров, следует по дороге для оптимизации передачи информации о транспортных средствах, по мере того, как они используют дорогу. Взаимосвязанные контроллеры вдоль линии связи формируют локальную дорожную сеть или RAN 35-6. Мощность передается установленным в дорогу считывателям от блока питания 35-1, который обычно находится в контроллере 35-3, используя установленную в дорогу шину питания "грязный DC" 35/36-2. Установленные на дорогу считыватели, для помощи быстрой установке и устранения кабелей, используют блок батарей 35/36-9 который также устанавливаются в раму передвижного "лежачего полицейского". Синхронизация множества считывателей выполняется используя боковой луч 35/36-13 и контроллер. Считыватели куполообразны 35-8 для обеспечения стекания, спадания и т.д., жидкостей, пыли, и т.д., с верха считывателей.
[00148] Фигура 37 иллюстрирует предпочтительный вариант реализации изобретения установленного в/на дорогу устройства. Антенна 35-4 (являющейся адаптированной дипольной антенной) во многом диктует конструкцию устройства. Все другой компоненты устанавливаются так, чтобы не загораживать или деформировать желаемую диаграмму направленности излучения антенны в форме "пончика". Размеры устройства обычно меньше, чем 300 мм в диаметре для круглого узла (или 300 мм поперек квадратного узла) и не более чем 50 мм в высоту. Вся конструкция заполнена залитым материалом для обеспечения защиты от ударов, вибрации, воды, газов и других факторов среды. Верх округлен 37-9 до высоты которая позволяет колесам транспортного средства перекатываться, очищать купол, например, стеканием жидкости, и т.д., но что важно форма купола достаточно низка и имеет такую форму чтоб минимизировать удар колесами и вибрацию. Купол может содержать светодиоды статуса 37-1 и объективы 37-2 с оптической передачей на внутренние камеры 37-3. Другие части, включая:
- радиочастотный узел 37-5, который обеспечивает сервисы RFID, радара и беспроводной связи;
- блок питания 37-6, который выравнивает питание "грязный DC"; и
- логический узел 37-7, который может содержать дополнительные датчики, то есть вибрации, удара и температуры;
располагаются ниже антенны плоскости земли. В случае применения при устанавке в дорогу, конструкция устройства позволяет ему быть втиснутым в полость в дорогу и также быть вытянутым из полости, используя извлекающий подъемник 37-10. Устройство герметизируется в месте установки, используя незатвердевающий компаунд, например, битум. Выводы питания 37-8 подключают устройство к шине питания. Шина питания, для стационарной установки в дорогу, является полосовым проводом загерметизированным в две штробы, пересекающие дорогу. Выводы вдавливаются в полосковый провод. В случае применения при установке на дорогу, выводы соединяются с контактными площадками, которые предусматриваются в раме перемещаемого "лежачего полицейского". Рама перемещаемого "лежачего полицейского" содержит перезаряжаемые батареи. Батареи могут перезаряжаться посредством обычного способа USB зарядки.
[00149] Фигура 38 иллюстрирует механизм простого удаления считывателя 38-1 из дороги. Устройство устанавливается в дорогу 38-2 посредством вырезания полости для устройства и двух штроб для шины питания. Считыватель вдавливается в полость и герметизируется незатвердевающим компаундом совместимым с поверхностью дороги, например, битумом, что позволяет считывателю быть в последствии вытянутым из полости. Устройство удаления состоит из станины экстрактора 38-3, которая устанавливается над извлекаемым считывателем. Станина экстрактора обычно имеет по меньшей мере три лапы. Пластина крепежа экстрактора 38-4 прикрепляется к устройству по меньшей мере тремя болтами крепления 38-6. Винт экстрактора 38-5 затем поворачивается для подъема пластины крепежа экстрактора, вытягивая считыватель из полости.
[00150] В настоящем описании и формуле изобретения (если встречается), слово 'содержит' и его производные, включая 'содержат' и 'содержать' включают в себя каждое из указанных значений, но не исключает включение дополнительных одного или нескольких дополнительных значений.
[00151] Ссылка в данном описании на 'один из вариантов 'или' варианта реализации' означает, что конкретная характерная особенность, структура или характеристика, описанные в связи с вариантом реализации, включены по меньшей мере в одном из вариантов реализации настоящего изобретения. Таким образом, появление фразы 'в одном варианте реализации' или 'в одном варианте осуществления' в различных местах по всему данному описанию не обязательно относятся к одному варианту реализации изобретения. Кроме того, конкретные характерные особенности, конструкции или характеристики могут быть объединены любым подходящим способом в одной или нескольких комбинациях.
[00152] В соответствии с законом, изобретение было описано на языке, более или менее характерном для конструктивных или методических особенностей. Следует понимать, что изобретение не ограничивается конкретными характерными особенностями или описанным, так как средства, описанные здесь включают в себя предпочтительные формы ввода изобретения в действие. Изобретение, таким образом, заявлено в любой из его форм или модификаций в пределах надлежащего объема прилагаемой формулы изобретения (если таковые имеются) соответствующим образом интерпретированных специалистами в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННА | 2018 |
|
RU2754305C2 |
| Способ фиксации нарушений Правил дорожного движения | 2023 |
|
RU2806291C1 |
| Способ идентификации транспортных средств на автомобильной дорожной трассе | 2021 |
|
RU2772680C1 |
| ПАРКОВОЧНЫЙ КОМПЛЕКС | 2015 |
|
RU2629459C2 |
| ИНДУКЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ, ИНДУКЦИОННЫЙ РЕГИСТРАЦИОННЫЙ НОМЕРНОЙ ЗНАК И ИНДУКЦИОННЫЙ СЧИТЫВАТЕЛЬ | 2012 |
|
RU2514025C1 |
| ИНДУКЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2566586C2 |
| ПАРКОВОЧНЫЙ КОМПЛЕКС | 2015 |
|
RU2629458C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440619C1 |
| Световозвращающая пленка с метками радиочастотной идентификации | 2017 |
|
RU2672641C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ НА ПЕРЕКРЕСТКЕ | 2014 |
|
RU2564469C1 |



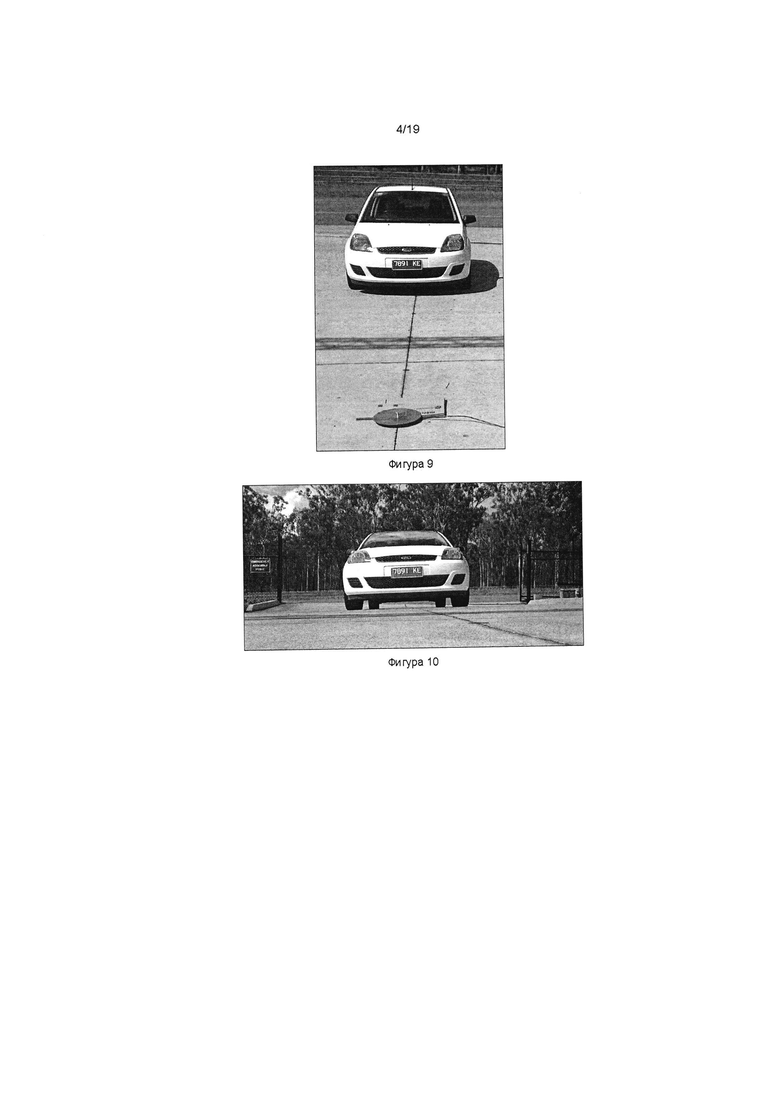



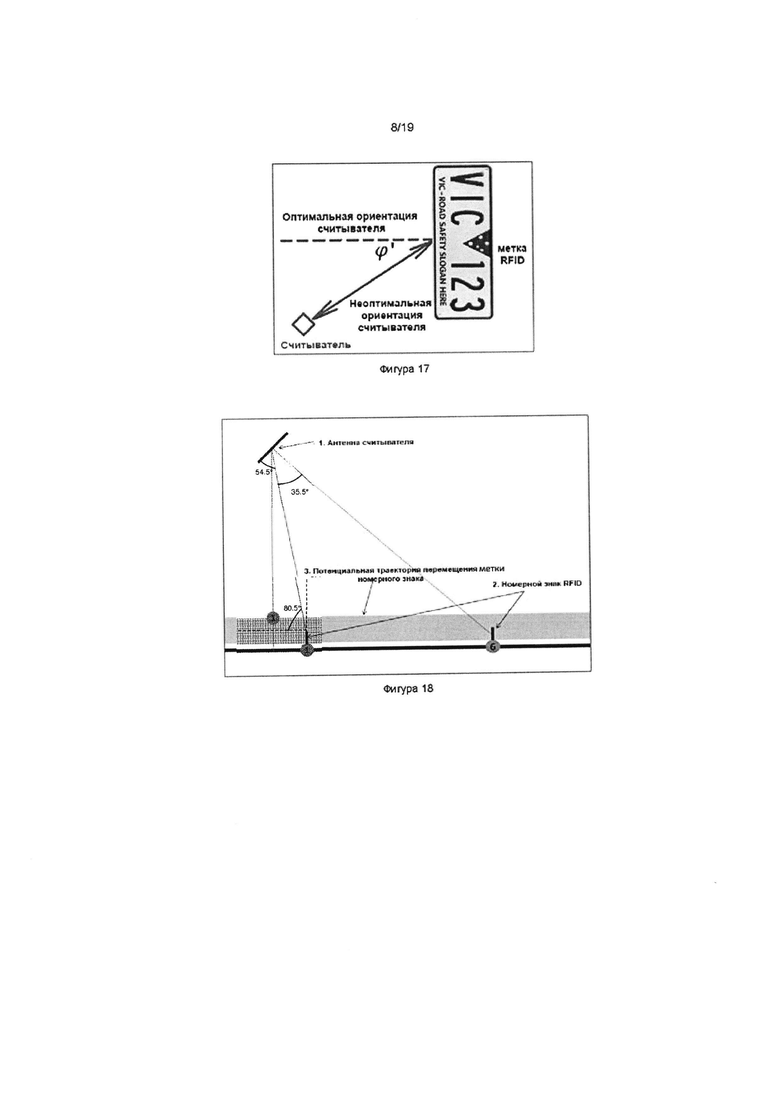
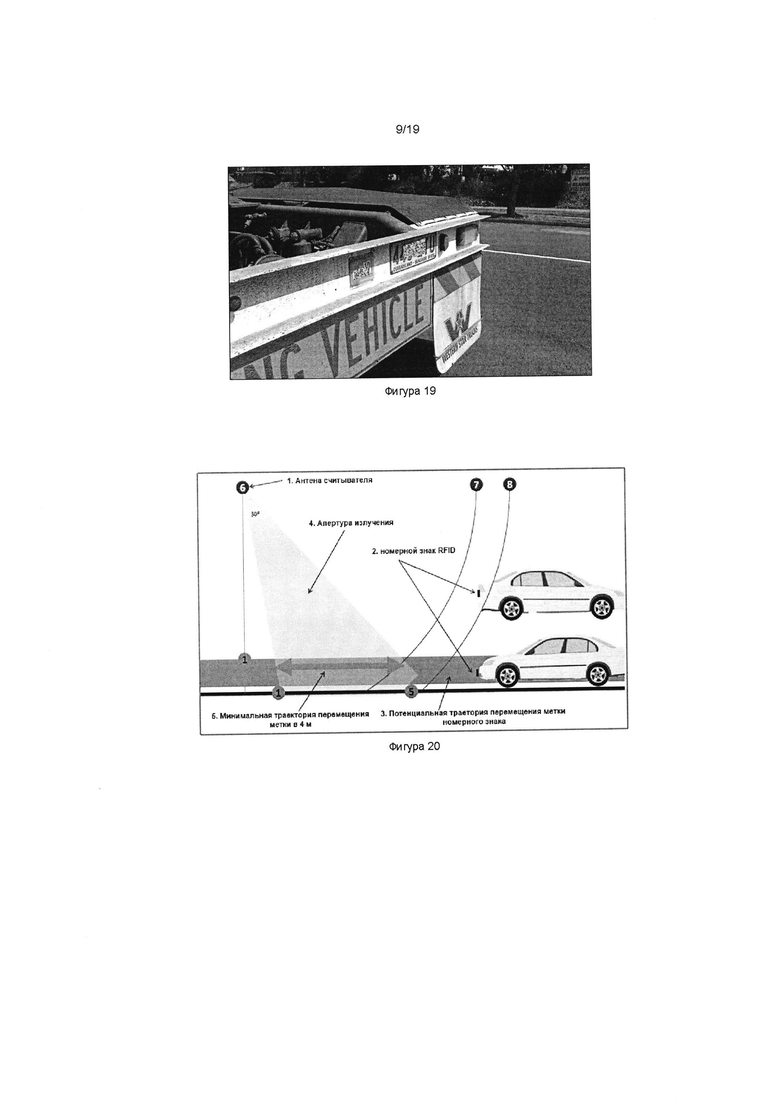
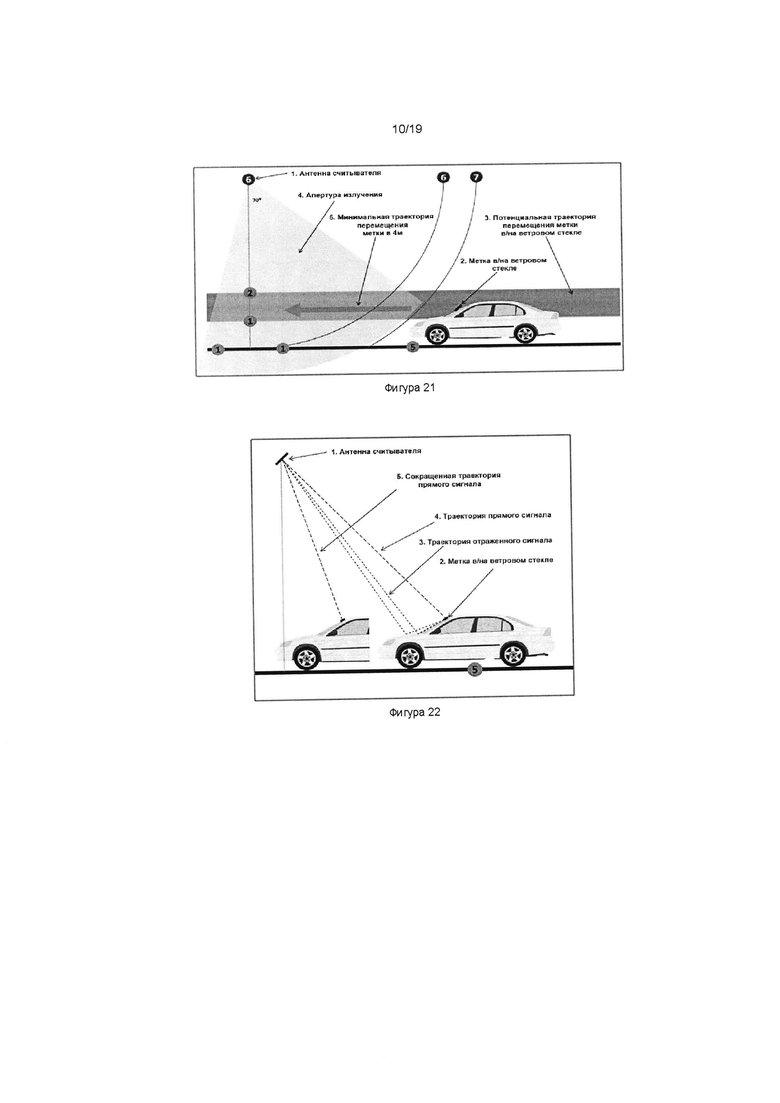
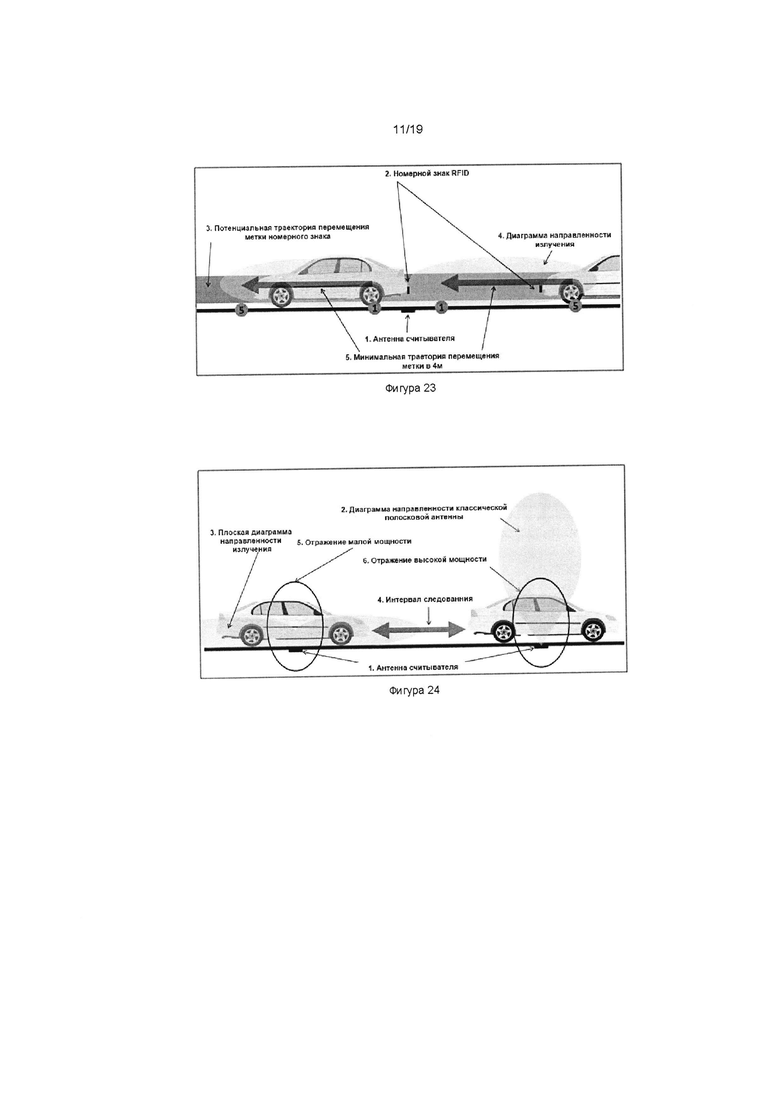




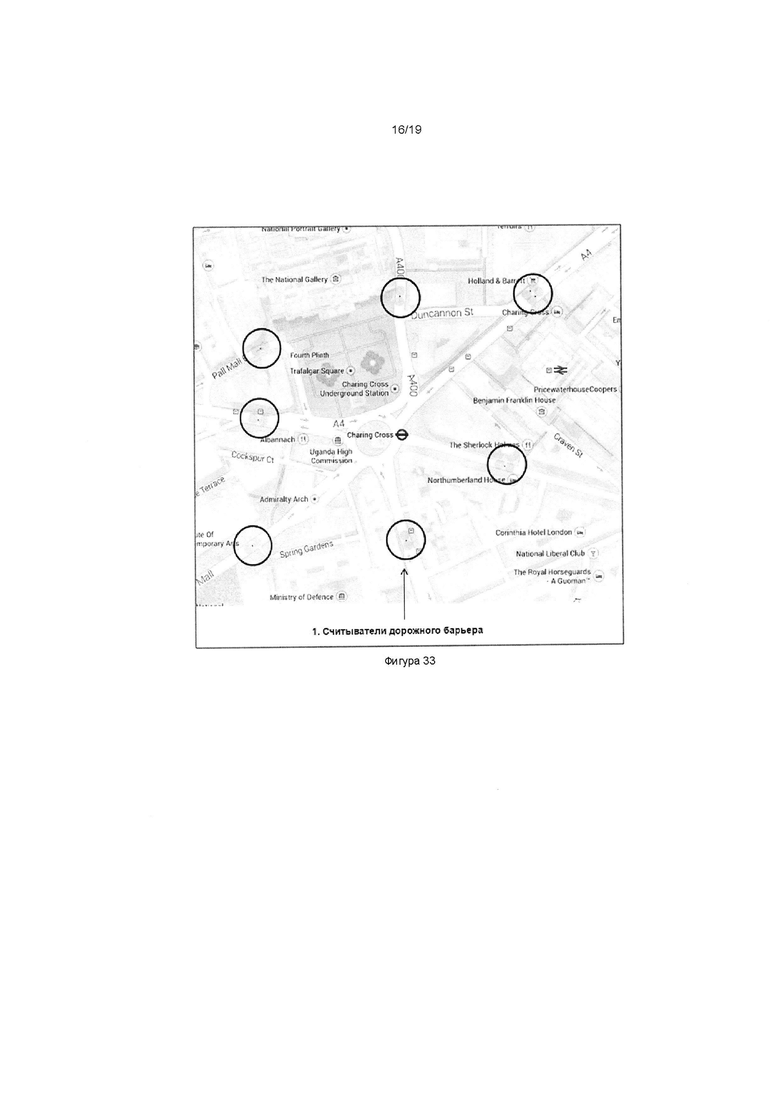



Группа изобретений относится к системам для обнаружения и идентификации транспортных средств. Каждое из индивидуальных транспортных средств имеет по меньшей мере одно устройство связи RFID, установленное на нем вблизи поверхности, по которой перемещаются транспортные средства, и устройство(а) связи RFID транспортного средства выполнено с возможностью передачи устройству сигнала, указывающего на идентичность этого транспортного средства. Причем устройство содержит RFID считыватель, содержащий антенну, выполненную с возможностью установки на или в поверхности, по которой перемещаются транспортные средства. Антенна выполнена с возможностью передачи сигнала на устройство(а) связи RFID транспортного средства и для получения отраженного модулированного сигнала от устройства связи RFID на этом транспортном средстве, указывающего на идентичность этого транспортного средства. Обеспечивается обнаружение и идентификация транспортных средств. 2 н. и 13 з.п. ф-лы, 38 ил.
1. Система для обнаружения и идентификации транспортных средств, в которой каждое из индивидуальных транспортных средств имеет по меньшей мере одно устройство связи RFID с направленной антенной устройства вблизи поверхности, по которой перемещаются транспортные средства, диаграмма направленности каждой антенны устройства направлена параллельно направлению перемещения транспортного средства, при этом система включает в себя также устройство, причем каждое устройство связи RFID выполнено с возможностью, при работе должным образом, отражения модулированного ультравысокочастотного (УВЧ) сигнала на указанное устройство, указывающего на идентичность этого конкретного транспортного средства, причем устройство содержит RFID считыватель, содержащий антенну считывателя, выполненную с возможностью установки на или в поверхности, по которой перемещается транспортное средство, антенна считывателя и антенна устройства определяют область считывания, RFID считыватель выполнен с возможностью, когда устройство связи RFID транспортного средства находится в области считывания, передачи сигнала на указанное устройство связи RFID и, при работе указанного устройства связи RFID должным образом, получения модулированного отраженного УВЧ-сигнала от указанного устройства связи RFID, указывающего на идентичность этого конкретного транспортного средства, так что это транспортное средство таким образом идентифицируется при использовании устройства, причем диаграмма направленности антенны считывателя имеет форму, похожую на широкий и низкий тор, расположенный на или сразу над поверхностью, по которой перемещаются транспортные средства, с центром в месте расположения антенны считывателя, так что в области считывания находится область пространства, которая:
проходит от около 5 м по горизонтали до антенны считывателя RFID до около 5 м по горизонтали за антенной считывателя RFID в данном (или любом) направлении перемещения транспортного средства;
имеет ширину около 4 м по горизонтали, перпендикулярно направлению перемещения транспортного средства; и
проходит от около 200 мм до около 1200 мм по вертикали над поверхностью, по которой перемещается транспортное средство.
2. Система по п. 1, в которой область пространства от около 1 м по горизонтали до антенны считывателя RFID до около 1 м по горизонтали после антенны считывателя RFID в направлении перемещения транспортного средства исключается из области считывания и по существу при всех значениях ширины и высоты в пределах этого горизонтального пространства относительно места расположения антенны считывателя RFID исключается из области считывания.
3. Система по п. 1 или 2, отличающаяся тем, что в случае если устройство обнаруживает отраженный немодулированный сигнал от транспортного средства при отсутствии модулированного сигнала от устройства связи RFID на этом транспортном средстве, то это транспортное средство все равно обнаруживается, но не идентифицируется устройством, и это указывает на то, что устройство связи RFID на этом транспортном средстве может отсутствовать или не работать должным образом.
4. Система по любому из пп. 1 или 2, отличающаяся тем, что транспортные средства являются зарегистрированными дорожными транспортными средствами, устройство(а) связи RFID и антенна(ы) устройств на транспортном средстве устанавливается на или в одном или большем количестве номерных/регистрационных знаков транспортного средства, а считыватель RFID устройства, или по меньшей мере его часть, включая его антенну, выполнен с возможностью находиться на поверхности дороги или устанавливаться в поверхность дороги.
5. Система по любому из пп. 1 или 2, отличающаяся тем, что имеет возможности радара, причем указанный радар выполнен с возможностью обеспечения одного из следующего или их комбинаций: определения скорости и/или положения транспортного средства и получения эффективной отражающей поверхности движущегося транспортного средства, и дополнительно, или в качестве альтернативы, устройство выполнено с возможностью определения длины и/или количества осей транспортного средства.
6. Система по п. 1 или 2, причем устройство дополнительно включает в себя по меньшей мере один дополнительный датчик, выбранный из: камеры или датчика формирования изображения, датчика вибрации или удара, температурного датчика, датчика погоды, датчика качества воздуха.
7. Комплекс систем для обнаружения, идентификации и/или мониторинга транспортных средств, включающий в себя множество систем по любому из предшествующих пунктов, при этом комплекс также включает в себя контроллер, связанный с указанными устройствами указанных систем.
8. Комплекс систем по п. 7, отличающийся тем, что транспортные средства являются зарегистрированными дорожными транспортными средствами и устройство(а) связи RFID на транспортном средстве(ах) устанавливается на или в одном или большем количестве номерных/регистрационных знаков транспортного средства, причем комплекс систем содержит одну или большее количество станций на различных дорожных местах расположения, и станция содержит
одно или большее количество устройств или синхронизированную группу устройств, и
для каждой станции есть контроллер, связанный с указанным устройством(ами), который является локальным придорожным контроллером.
9. Комплекс систем по п. 8, отличающийся тем, что каждая станция связана с удаленным системным контроллером.
10. Комплекс систем по любому из пп. 8 или 9, отличающийся тем, что одна или большее количество станций содержат дорожную камеру, выполненную с возможностью содействия наблюдению за поведением транспортного средства или для содействия отслеживанию транспортных средств как объектов изображения.
11. Комплекс систем по любому из пп. 8 или 9, отличающийся тем, что придорожный контроллер станции выполнен с возможностью связи с придорожным контроллером одной или большего количества других станций.
12. Комплекс систем по п. 9, отличающийся тем, что придорожный контроллер станции использует информацию от придорожного контроллера(ов) одной или большего количества других станций, информацию от удаленного системного контроллера и/или данные от его одного или большего количества устройств или синхронизированной группы устройств для обнаружения поведения по меньшей мере определенного транспортного средства.
13. Комплекс систем по п. 12, отличающийся тем, что придорожный контроллер станции передает свои наблюдения поведения транспортного средства на придорожный контроллер(ы) одной или большего количества других станций и/или на удаленный системный контроллер.
14. Комплекс систем по п. 12 или 13, отличающийся тем, что придорожный контроллер станции передает свои наблюдения наблюдаемого поведения транспортного средства, и/или идентичность транспортного средства, транспортному средству полиции или персоналу, расположенному на предполагаемом маршруте движения транспортного средства.
15. Комплекс систем по одному из пп. 8-10, 14, в котором по меньшей мере одно устройство или другой элемент комплекса систем включает в себя по меньшей мере один дополнительный датчик, выбранный из: камеры или датчика формирования изображения, датчика вибрации или удара, температурного датчика, датчика погоды, датчика качества воздуха.
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| СПОСОБ ДИСТАНЦИОННОГО СЧИТЫВАНИЯ ДАННЫХ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2009 |
|
RU2476938C2 |
| US 8384560 B2, 26.02.2013 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454726C1 |
| Устройство для механического вождения грейферного грузчика по забою при проходке вертикальных стволов шахт | 1959 |
|
SU132597A1 |

