Изобретение относится к области космической техники и может быть использовано для уменьшения погрешности ориентации навигационного космического аппарата (КА) на Солнце и Землю при прохождении особых участков орбиты.
Известен способ ориентации навигационного космического аппарата при проведении упреждающих программных разворотов, включающий ориентацию первой оси космического аппарата на Землю, путем разворотов космического аппарата вокруг второй и третьей осей, ориентацию панелей солнечных батарей на Солнце путем разворота панелей солнечных батарей вокруг второй оси космического аппарата, определение параметров упреждающего программного разворота вокруг первой оси космического аппарата за заданное время до начала разворота с использованием расчетных зависимостей параметров упреждающего программного разворота от угла между плоскостью орбиты и направлением на Солнце на момент начала разворота, проведение упреждающих программных разворотов вокруг первой оси космического аппарата с использованием эталонной модели упреждающего программного разворота на участках орбиты, симметричных относительно точек орбиты, в которых угол Солнце - космический аппарат - Земля максимален или минимален [Патент №2569999 от 05.11.2015 г. Способ ориентации навигационного спутника].
При работе по целевому назначению навигационные КА ориентированы в солнечно-земной системе координат (первая ось (ОХ) КА ориентирована по местной вертикали, третья ось (OY) КА ориентирована в плоскости Солнце - космический аппарат - Земля в сторону Солнца, вторая ось (OZ) КА дополняет систему координат до правой), при этом нормали к панелям солнечных батарей ориентированы на Солнце путем разворотов относительно оси OZ с помощью приводов солнечных батарей (СБ). При такой ориентации поверхность со стороны оси минус OY остается незасвеченной.
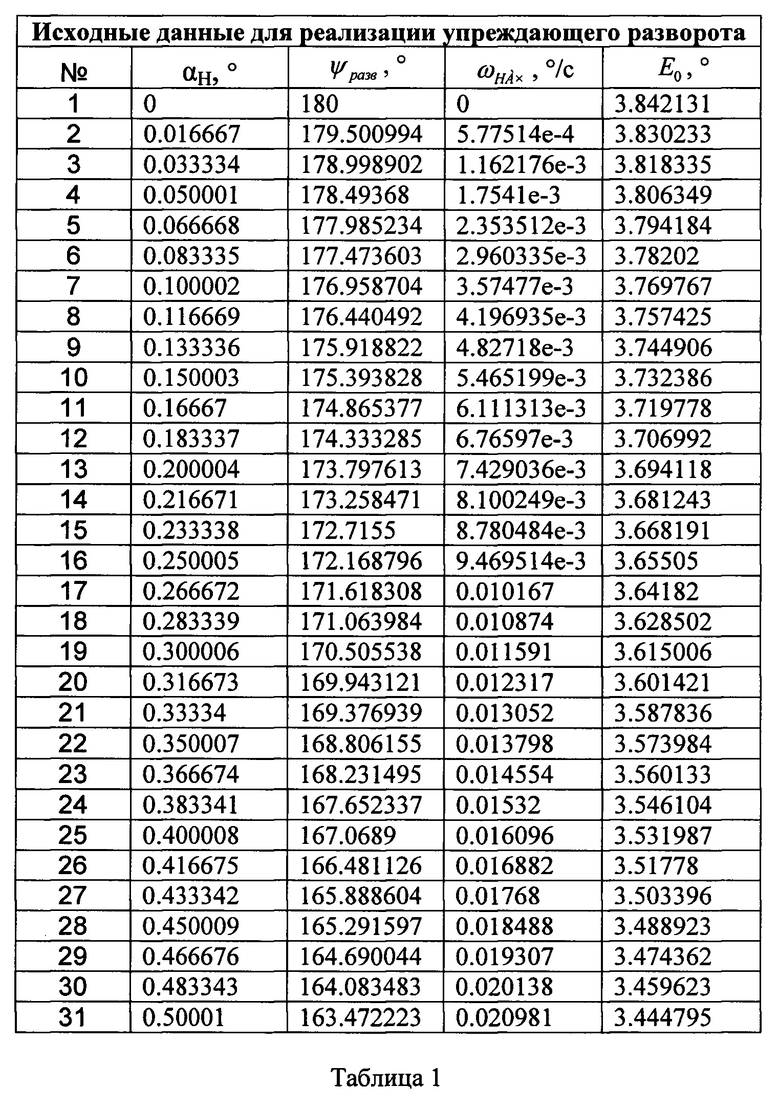
Ориентация КА в солнечно-земной системе координат иллюстрирована на фиг. 1, на которой обозначено: СОЗ - угол Солнце - объект (космический аппарат) - Земля; α - угол между плоскостью орбиты и направлением на Солнце; О - центр масс КА; S - направление на Солнце; S1 - проекция направления на Солнце на плоскость орбиты; Е - угол от текущего положения КА на орбите до точки орбиты, в которой угол СОЗ максимален; Е0 - угол от точки по орбите, в которой включается упреждающий разворот до точки, в которой угол СОЗ максимален; ψ - курсовой угол (текущий угол между осью OY и вектором линейной скорости); ψРАЗ - угол разворота вокруг оси ОХ в процессе движения по орбите от текущего положения плоскости СОЗ до оси OZ0; ω0 - орбитальная угловая скорость КА; V - линейная скорость КА; OXOYOZO - орбитальная система координат (OXO - направлена по текущему радиус-вектору изделия от Земли, OYO - направлена по вектору линейной скорости КА, OZO - дополняет систему координат до правой); OXZYZZZ - солнечно-земная система координат (OXZ - совпадает с OXO, OYZ - лежит в плоскости СОЗ и направлена в сторону Солнца, OZZ - дополняет систему координат до правой); OXYZ - связанная с КА система координат.
Скорость вращения плоскости СОЗ (ωСОЗ) определяется по формуле (1) с помощью фиг. 1.

Вывод формулы (1):
Из сферического треугольника OSS1 на фиг. 1 имеем:

Дифференцируя (2) и полагая, что α'=0 и Е'=ω0, получим:

Из сферического треугольника OSS1 на фиг. 1 имеем:




Подставляя (7) в (3) получим формулу (1).
Из формулы (1) следует, что при угле α между плоскостью орбиты и направлением на Солнце, близком к нулю, скорость вращения плоскости СОЗ близка к нулю. Однако в точке E=0° (180°) скорость вращения плоскости СОЗ стремится к бесконечности. При прохождении таких точек космический аппарат совершает разворот вокруг оси ОХ КА. Это обусловлено тем, что поверхности КА со стороны оси минус OY и стороны плюс OY имеют разные зеркальные и диффузные коэффициент отражения, поэтому засвечивание поверхности КА со стороны минус OY приведет к непрогнозируемым силам от солнечного давления, которые влияют на движение центра масс космического аппарата, что для навигационных КА является неприемлемым.
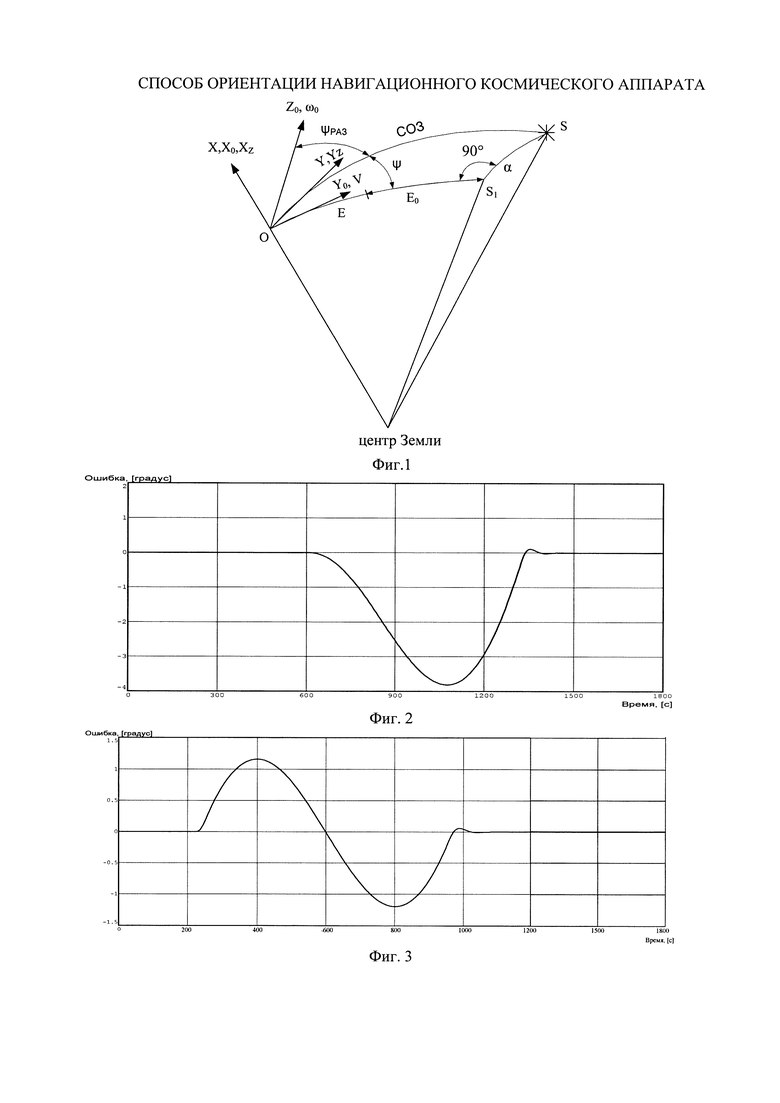
Таким образом, проведение разворота КА (отслеживание плоскости СОЗ) при прохождении малых (близких к 0°) и больших (близких к 180°) углов СОЗ с использованием исполнительных органов системы ориентации без ошибки невозможно. На фиг. 2, 3 показаны процессы отслеживания плоскостью XOY плоскости СОЗ без упреждения и с упреждением при угле α=0.
Из рассмотрения фиг. 2, 3 видно, что без упреждения ошибка ориентации панелей СБ на Солнце получается существенно больше, чем с упреждением.
Необходимо отметить, что ошибка ориентации панелей СБ на Солнце также приводит к непрогнозируемым силам от солнечного давления, которые влияют на движение центра масс космического аппарата.
При проведении упреждающего программного разворота информация об ориентации КА относительно оси ОХ может поступать с блока измерения скоростей (БИС), а информация об ориентации вокруг осей OY, OZ может поступать с прибора ориентации на Землю (ПОЗ). В настоящее время погрешность БИС, применяемых на большинстве КА, составляет 0,3 °/ч, а погрешность ПОЗ составляет 3' в плоскости сканирования и 6' перпендикулярно плоскости сканирования.
Также при проведении упреждающего программного разворота информация об ориентации КА относительно осей OX, OY, OZ КА может поступать с прибора звездного (ПЗВ), погрешность которого не превышает 0,5'.
Основным недостатком способа ориентации навигационного КА, описанного выше, является то, что при проведении упреждающего программного разворота по информации с БИС и ПОЗ возрастает погрешность ориентации панелей СБ на Солнце и погрешность знания фазового центра антенны, а при ориентации с ПЗВ КА отслеживает плоскость СОЗ, поэтому после перехода КА через точку E=0° (180°), погрешность между фактическим углом разворота КА вокруг оси ОХ и плоскостью СОЗ может достигать 180° (происходит мгновенное вращение плоскости СОЗ на величину до 180°), что приводит к несимметричному развороту (фиг. 3) или может привести к потере ориентации КА.
Выходом из сложившейся ситуации может быть модернизация алгоритмов отслеживания курсового угла при упреждающем программном развороте по информации с ПЗВ.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является способ ориентации навигационного космического аппарата при проведении упреждающих программных разворотов, включающий ориентацию первой оси космического аппарата на Землю, путем разворотов космического аппарата вокруг второй и третьей осей, ориентацию панелей солнечных батарей на Солнце путем разворота панелей солнечных батарей вокруг второй оси космического аппарата, определение параметров упреждающего программного разворота вокруг первой оси космического аппарата за заданное время до начала разворота с использованием расчетных зависимостей параметров упреждающего программного разворота от угла между плоскостью орбиты и направлением на Солнце на момент начала разворота, проведение упреждающих программных разворотов вокруг первой оси космического аппарата с использованием эталонной модели упреждающего программного разворота на участках орбиты, симметричных относительно точек орбиты, в которых угол Солнце - космический аппарат - Земля максимален или минимален [Патент №2569999 от 05.11.2015 г. Способ ориентации навигационного спутника].
Описанный способ принят за прототип изобретения.
Недостатки прототипа:
При прохождении участков орбиты, на которых угол СОЗ максимален или минимален при управлении КА по информации с БИС и ПОЗ, возрастает погрешность по каналам ориентации, что приводит к увеличению погрешности прогнозирования движения центра масс КА и к погрешности определения фазового центра антенны. При управлении КА по информации с ПЗВ КА отслеживает плоскость СОЗ, поэтому после перехода КА через точку Е=0° (180°), погрешность между фактическим углом разворота КА вокруг оси ОХ и плоскостью СОЗ может достигать 180° (происходит мгновенное вращение плоскости СОЗ на величину до 180°), что приводит к несимметричному развороту относительно точки максимального (минимального) угла СОЗ или может привести к потере ориентации КА.
Таким образом, целесообразно, при прохождении больших и малых углов СОЗ модернизировать алгоритмы отслеживания курсового угла по информации с ПЗВ с целью обеспечения симметричности упреждающего разворота относительно точки максимального (минимального) угла СОЗ. Это позволит уменьшить погрешность прогнозирования движения центра масс навигационного КА и погрешность знания фазового центра антенны, а также исключить потерю ориентации КА при переходе через точку E=0° (180°).
В основу настоящего изобретения положена задача создания способа, позволяющего уменьшить погрешность прогнозирования движения центра масс навигационного КА и погрешность определения фазового центра антенны при проведении упреждающего программного разворота.
Поставленная задача решается следующим образом.
Заявлен способ ориентации навигационного космического аппарата при проведении упреждающих программных разворотов, включающий ориентацию первой оси космического аппарата на Землю, путем разворотов космического аппарата вокруг второй и третьей осей, ориентацию панелей солнечных батарей на Солнце путем разворота панелей солнечных батарей вокруг второй оси космического аппарата, определение параметров упреждающего программного разворота вокруг первой оси космического аппарата за заданное время до начала разворота, с использованием расчетных зависимостей параметров упреждающего программного разворота от угла между плоскостью орбиты и направлением на Солнце на момент начала разворота, проведение упреждающих программных разворотов вокруг первой оси космического аппарата с использованием эталонной модели упреждающего программного разворота на участках орбиты, симметричных относительно точек орбиты, в которых угол Солнце - космический аппарат - Земля максимален или минимален. При управлении ориентацией космического аппарата по информации звездного прибора в процессе проведения упреждающего программного разворота на каждом цикле управления вычисляют кватернион (матрицу) перехода от солнечно - земной системы координат на момент начала упреждающего разворота к смещенной солнечно - земной системе координат, определяемой с использованием эталонной модели упреждающего программного разворота, далее, используя информацию, поступающую со звездного прибора, вычисляют кватернион (матрицу) перехода от связанной системы координат к смещенной солнечно - земной системе координат, из полученного кватерниона (матрицы) вычисляют углы отклонения связанной системы координат от смещенной солнечно - земной системы координат, формируют управляющие моменты, направленные на уменьшение рассогласования между связанной системой координат и смещенной солнечно - земной системой координат, при этом управляющий момент вокруг первой оси космического аппарата формируют для уменьшения рассогласования между эталонным и фактическим движениями космического аппарата вокруг первой оси.
Сущность изобретения.
С целью уменьшения погрешности прогнозирования движения центра масс навигационного КА и погрешности определения фазового центра антенны на особых участках орбиты при модуле угла между плоскостью орбиты и направлением на Солнце меньше заданного значения при проведении упреждающего программного разворота (далее по тексту упреждающего разворота) на каждом цикле управления в программном обеспечении (ПО) системы ориентации и стабилизации (СОС) вычисляют кватернион перехода от связанной системы координат к смещенной солнечно-земной по следующей формуле:

где:
 - кватернион перехода от связанной системы координат к приборной системе координат (вычисляется на Земле при установке ПЗВ и закладывается в ПО СОС);
- кватернион перехода от связанной системы координат к приборной системе координат (вычисляется на Земле при установке ПЗВ и закладывается в ПО СОС);
 - кватернион перехода от приборной системы координат к инерциальной системе координат (поступает с ПЗВ);
- кватернион перехода от приборной системы координат к инерциальной системе координат (поступает с ПЗВ);
 - кватернион перехода от инерциальной системы координат к смещенной солнечно - земной системе координат (вычисляется в ПО СОС);
- кватернион перехода от инерциальной системы координат к смещенной солнечно - земной системе координат (вычисляется в ПО СОС);
W, X, Y, Z - элементы кватерниона перехода от связанной системы координат к смещенной солнечно-земной.
Кватернион  вычисляется по следующей формуле:
вычисляется по следующей формуле:

где:
 - кватернион перехода от инерциальной системы координат к солнечно - земной системе координат на момент начала упреждающего разворота (вычисляется в программном комплексе баллистических задач);
- кватернион перехода от инерциальной системы координат к солнечно - земной системе координат на момент начала упреждающего разворота (вычисляется в программном комплексе баллистических задач);
 - кватернион перехода от солнечно-земной системы координат на момент начала упреждающего разворота к смещенной солнечно - земной системе координат (вычисляется в ПО СОС).
- кватернион перехода от солнечно-земной системы координат на момент начала упреждающего разворота к смещенной солнечно - земной системе координат (вычисляется в ПО СОС).
Поскольку упреждающий разворот происходит вокруг оси ОХ КА, а вокруг осей OY и OZ должны поддерживаться проекции орбитальной скорости на эти оси, то кватернион  будет вычисляется по следующей формуле:
будет вычисляется по следующей формуле:

где:
ψA - эталонный курсовой угол при проведении упреждающего разворота.
Модель упреждающего разворота разделена на три участка:
- участок разгона (участок набора максимальной скорости) - описывает движение космического аппарата вокруг оси ОХ при наборе максимальной скорости вращения КА. Набор поисковой скорости характеризуется наличием постоянного углового ускорения;
- участок разворота на максимальной скорости - описывает движение космического аппарата вокруг оси ОХ с постоянной максимальной скоростью вращения КА;
- участок торможения - описывает движение космического аппарата вокруг оси ОХ при уменьшении угловой скорости космического аппарата с постоянным отрицательным ускорением.
Поэтому эталонный курсовой угол вычисляется по следующим формулам:







где:
 - угол, пройденный на участке разгона;
- угол, пройденный на участке разгона;
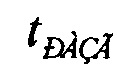
ψРАЗВ - полный угол упреждающего разворота (вычисляется из таблицы 1);
 - значение скорости вращения КА на момент начала упреждающего разворота (вычисляется из таблицы 1);
- значение скорости вращения КА на момент начала упреждающего разворота (вычисляется из таблицы 1);
 - значение максимальной скорости вращения КА (константа);
- значение максимальной скорости вращения КА (константа);
 - время разгона (торможения) КА до (от) максимальной скорости вокруг оси ОХ;
- время разгона (торможения) КА до (от) максимальной скорости вокруг оси ОХ;
 - время разворота вокруг оси ОХ с максимальной скоростью;
- время разворота вокруг оси ОХ с максимальной скоростью;
ω' - угловое ускорение КА при проведении разворота (константа).
 - время начала упреждающего разворота;
- время начала упреждающего разворота;
 - время окончания упреждающего разворота;
- время окончания упреждающего разворота;
t - текущее время;
ET - угловое расстояние по орбите от текущей точки до точки, в которой угол СОЗ максимален (минимален);
Е0 - угловое расстояние по орбите от точки, в которой включается упреждающий разворот до точки, в которой угол СОЗ максимален или минимален (определяется из таблицы 1 по углу αH);
 - текущее значение угла между плоскостью орбиты и направлением на Солнце;
- текущее значение угла между плоскостью орбиты и направлением на Солнце;
СОЗ - текущее значение угла Солнце - КА - Земля;
ω0 - орбитальная угловая скорость (константа).
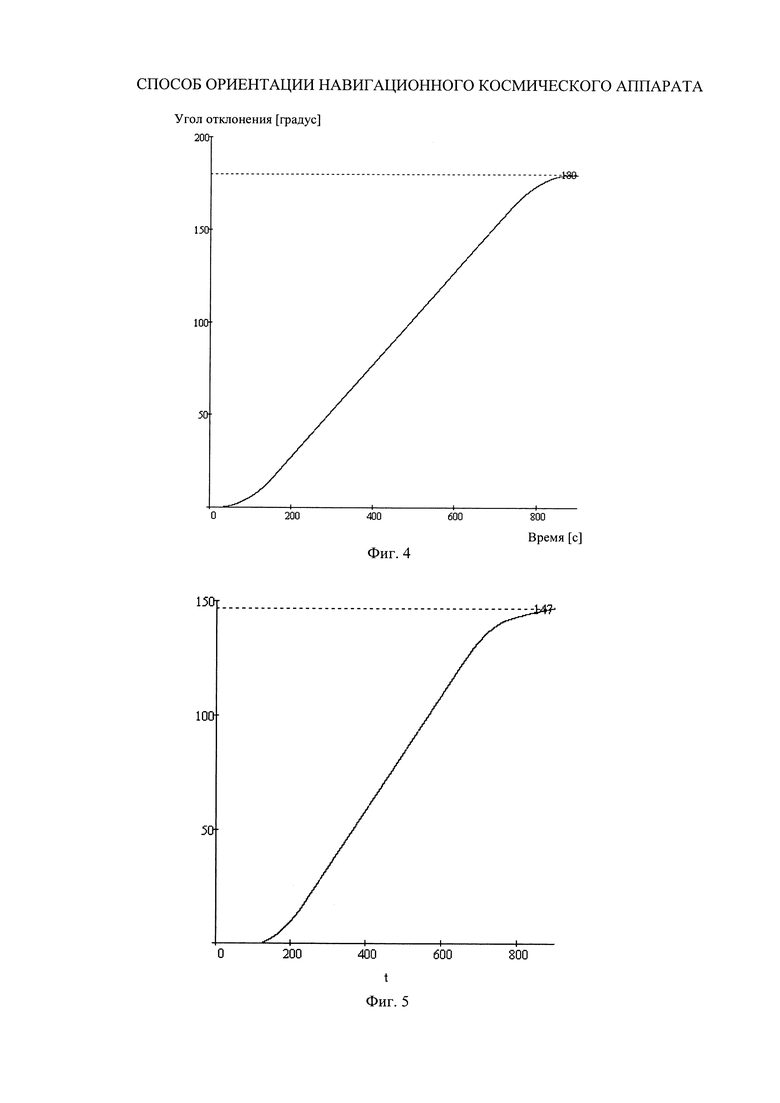
На фиг. 4 приведен график угла отклонения смещенной солнечно - земной системы координат от солнечно - земной системы координт на момент начала упреждающего разворота при угле между плоскостью орбиты и направлением на Солнце 0° при проведении упреждающего разворота.
На фиг. 5 приведен график угла отклонения смещенной солнечно - земной системы координат от солнечно - земной системы координт на момент начала упреждающего разворота при угле между плоскостью орбиты и направлением на Солнце 1° при проведении упреждающего разворота.
Параметры, необходимые для расчета эталонного курсового угла зависят только от угла α между плоскостью орбиты и направлением на Солнце.
Поэтому, если провести расчет таблиц зависимостей параметров эталонного курсового угла от угла α между плоскостью орбиты и направлением на Солнце (таблица 1) и заложить их в ПО СОС, то, зная угол αH между плоскостью орбиты и направлением на Солнце в момент включения упреждающего разворота, можно получить параметры упреждающего разворота, описанные выше.
Далее из кватерниона перехода от связанной системы координат к смещенной солнечно-земной вычисляют углы ориентации ψ, ϕ, θ относительно осей OX, OY и OZ, соответственно, наприме, по следующей формуле:

где:
W, X, Y, Z - элементы кватерниона перехода от связанной системы координат к смещенной солнечно-земной;
arctan2 - круговой арктангенс.
Также углы отклонения КА от эталонного движения можно вычислить с помощью матрицы перехода от свзанной системы координат к смещенной солнечно - земной системе координат. Для этого необходимо знать:
- матрицу перехода от приборной системы координат к связанной системе координат (вычисляется на Земле при установке ПЗВ и закладывается в ПО СОС);
- матрицу перехода от инерциальной системы координат к приборной системе координат (вычисляется из кватерниона, поступающего с ПЗВ);
- матрицу перехода от инерциальной системы координат к солнечно - земной системе координат на момент начала упреждающего разворота (вычисляется в программном комплексе баллистических задач);
- матрицу перехода от солнечно - земной системы координат на момент начала упреждающего разворота к смещенной солнечно - земной системе координат (вычисляется в ПО СОС по эталонному курсовому углу).
Управляющие моменты, направленные на уменьшения рассогласования между связанной системой координат и смещенной солнечно - земной системой координат вычисляются по следующим формулам:



где:
М0 - эталонный управляющий момент;
К1i, К2i - коэффициенты закона управления по соответствующим осям ориентации;
ψ, ϕ, θ - углы ориентации КА относительно осей OX, OY и OZ соответственно;
ψ', ϕ', θ' - производные от углов ориентации КА относительно осей OX, OY и OZ соответственно.
Таким образом, заявленное изобретение позволяет уменьшить погрешность прогнозирования движения центра масс КА и погрешность определения фазового центра антенны при прохождении особых участков орбиты.
Предложенный способ ориентации навигационного космического аппарата будет применяться в космических аппаратах системы «ГЛОНАСС».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата | 2018 |
|
RU2724216C2 |
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2014 |
|
RU2569999C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2016 |
|
RU2646392C2 |
| Способ ориентации космического аппарата | 2020 |
|
RU2735120C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2017 |
|
RU2671597C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2017 |
|
RU2671598C1 |
| СИСТЕМА ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2012 |
|
RU2535979C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ НАВИГАЦИОННОГО СПУТНИКА | 2018 |
|
RU2687512C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
Изобретение относится к области космической техники. В способе ориентации навигационного космического аппарата (КА) при проведении упреждающих программных разворотов по информации звездного прибора в процессе проведения упреждающего программного разворота на каждом цикле управления вычисляют кватернион перехода от солнечно-земной системы координат на момент начала упреждающего разворота к смещенной солнечно-земной системе координат, определяемой с использованием эталонной модели упреждающего программного разворота. Используя информацию со звездного прибора, вычисляют кватернион перехода от связанной системы координат к смещенной солнечно-земной системе координат. Из полученного кватерниона вычисляют углы отклонения связанной от смещенной солнечно-земной системы координат, формируют управляющие моменты, направленные на уменьшение рассогласования между связанной и смещенной солнечно-земной системами координат. Управляющий момент вокруг первой оси КА формируют для уменьшения рассогласования между эталонным и фактическим движениями КА вокруг первой оси. Техническим результатом изобретения является уменьшение погрешности прогнозирования движения центра масс КА. 5 ил., 1 табл.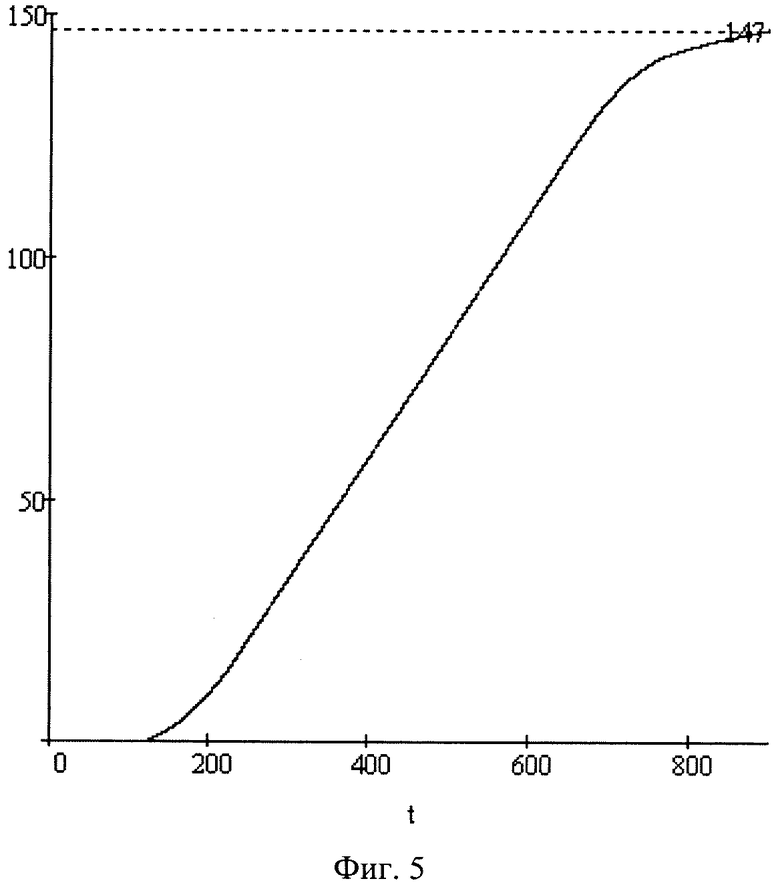
Способ ориентации навигационного космического аппарата при проведении упреждающих программных разворотов, включающий ориентацию первой оси космического аппарата на Землю, путем разворотов космического аппарата вокруг второй и третьей осей, ориентацию панелей солнечных батарей на Солнце путем разворота панелей солнечных батарей вокруг второй оси космического аппарата, определение параметров упреждающего программного разворота вокруг первой оси космического аппарата за заданное время до начала разворота с использованием расчетных зависимостей параметров упреждающего программного разворота от угла между плоскостью орбиты и направлением на Солнце на момент начала разворота, проведение упреждающих программных разворотов вокруг первой оси космического аппарата с использованием эталонной модели упреждающего программного разворота на участках орбиты, симметричных относительно точек орбиты, в которых угол Солнце - космический аппарат - Земля максимален или минимален, отличающийся тем, что при управлении ориентацией космического аппарата по информации звездного прибора в процессе проведения упреждающего программного разворота на каждом цикле управления вычисляют кватернион перехода от солнечно-земной системы координат на момент начала упреждающего разворота к смещенной солнечно-земной системе координат, определяемой с использованием эталонной модели упреждающего программного разворота, далее, используя информацию, поступающую со звездного прибора, вычисляют кватернион перехода от связанной системы координат к смещенной солнечно-земной системе координат, из полученного кватерниона вычисляют углы отклонения связанной системы координат от смещенной солнечно-земной системы координат, формируют управляющие моменты, направленные на уменьшение рассогласования между связанной системой координат и смещенной солнечно-земной системой координат, при этом управляющий момент вокруг первой оси космического аппарата формируют для уменьшения рассогласования между эталонным и фактическим движениями космического аппарата вокруг первой оси.
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2014 |
|
RU2569999C2 |
| US 6293502 B1, 25.09.2001 | |||
| СИСТЕМА ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2012 |
|
RU2535979C2 |

