Изобретение относится к области космической техники и может быть использовано на космических аппаратах (КА), ориентированных в солнечно-земной системе координат, для ориентации солнечных батарей на Солнце без прибора ориентации на Солнце.
Известен способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю (ПОЗ), ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси КА с плоскостью Солнце - космический аппарат - Земля по информации с прибора ориентации на Солнце (ПОС), установленного на корпусе КА, и разворот панелей СБ вокруг оси, параллельной третьей оси КА, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода солнечных батарей (СБ) по информации с ПОС [Космические вехи: сборник научных трудов, посвященный 50-летию создания АО «ИСС» имени академика М.Ф. Решетнева. - Красноярск: ИП Суховольская Ю.П., 2009. с. 129-130].
Для обеспечения функционирования космического аппарата в течение всего срока активного существования необходимо ориентировать нормаль к рабочей поверхности СБ на Солнце.
Основным недостатком способа ориентации космического аппарата в солнечно-земной системе координат, описанного выше, является то, что при отсутствии прибора ориентации на Солнце либо при его неисправности, невозможно определить угол рассогласования между направлением на Солнце и нормалью к рабочей поверхности солнечных батарей космического аппарата. Это приводит к нарушению ориентации панелей СБ на Солнце.
Выход из сложившейся ситуации может быть следующим.
При отсутствии прибора ориентации на Солнце или при его неисправности ориентацию панелей СБ на Солнце можно осуществить по информации об изменении сигнала (напряжение или ток), поступающего с панелей солнечных батарей, который зависит от угла падения Солнца на поверхность панелей СБ.
Наиболее близким к заявляемому решению по технической сущности и достигаемому техническому результату является способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с ПОЗ, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси КА с плоскостью Солнце - космический аппарат - Земля по информации с ПОС, установленного на корпусе КА, и разворот панелей СБ вокруг оси, параллельной третьей оси КА, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода СБ по информации с ПОС [Космические вехи: сборник научных трудов, посвященный 50-летию создания АО «ИСС» имени академика М.Ф. Решетнева. - Красноярск: ИП Суховольская Ю.П., 2009. с. 129-130].
Описанный способ принят за прототип изобретения.
Недостатком прототипа является то, что при отсутствии прибора ориентации на Солнце или его неисправности невозможно определить угол между второй осью КА и направлением на Солнце. Это приводит к потере ориентации нормали к рабочей поверхности солнечных батарей на Солнце.
В основу настоящего изобретения положена задача создания способа ориентации космического аппарата, ориентируемого в солнечно-земной системе координат, позволяющего обеспечить ориентацию панелей солнечных батарей на Солнце, без прибора ориентации на Солнце.
Поставленная задача решается следующим образом.
Заявлен способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси космического аппарата с плоскостью Солнце - космический аппарат - Земля и разворот панелей солнечных батарей вокруг оси, параллельной третьей оси космического аппарата, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода солнечных батарей, отличающийся тем, что при неисправности прибора ориентации на Солнце ориентацию второй оси космического аппарата относительно плоскости Солнце - космический аппарат - Земля проводят путем создания и поддержания скорости вращения вокруг первой оси космического аппарата по информации с блока измерения угловых скоростей, изменяют знак скорости вращения вокруг первой оси космического аппарата каждый раз при уменьшении сигнала, поступающего с панелей солнечных батарей, совмещают нормаль к поверхности солнечных батарей с направлением на Солнце путем разворота панелей солнечных батарей относительно оси, параллельной третьей оси космического аппарата, по расчетной баллистической информации с использованием привода солнечных батарей. Сущность изобретения.
При неисправности прибора ориентации на Солнце в режиме работы по целевому назначению постоянно обеспечивают ориентацию первой оси КА на Землю по информации с ПОЗ и, с целью минимизации погрешности ориентации панелей СБ на Солнце, ориентацию второй оси космического аппарата относительно плоскости Солнце - космический аппарат - Земля путем создания и поддержания скорости вращения вокруг первой оси космического аппарата по информации с блока измерения угловых скоростей (БИС), знак которой изменятся каждый раз при уменьшения сигнала, поступающего с панелей солнечных батарей. Совмещение нормали к поверхности солнечных батарей с направлением на Солнце осуществляют путем разворота панелей солнечных батарей относительно третьей оси космического аппарата по расчетной баллистической информации с использованием привода солнечных батарей.
Орбита космического аппарата, ориентируемого в солнечно-земной системе координат, имеет особые участки, включающие участки малых углов Солнце - космический аппарат - Земля (близких к 0°) и больших углов Солнце - космический аппарат - Земля (близких к 180°), при прохождении которых космический аппарат совершает разворот вокруг первой оси КА. Это обусловлено тем, что поверхность КА со стороны второй оси почти всегда ориентируется на Солнце, при этом поверхность со стороны минус второй оси находится в тени. Если не проводить разворот КА вокруг первой оси, то произойдет засвечивание поверхности КА со стороны минус второй оси, что в свою очередь приведет к увеличению приборного состава КА (дополнительные ПОС со стороны минус второй оси), нарушению температурных режимов КА и непрогнозируемому движению центра масс КА (неприемлемо для навигационных КА).
Для уменьшения величины непрогнозируемого движения центра масс КА во время прохождения особых участков орбиты при угле Солнце - космический аппарат - Земля меньше (больше) заданного значения для малых (больших) углов Солнце - космический аппарат - Земля, запоминают курсовой угол (угол между вектором линейной скорости КА и проекцией направления на Солнце на плоскость, образованную вектором линейной скорости КА и нормалью к плоскости орбиты), рассчитанный по баллистической информации на момент начала особого участка. Далее на каждом цикле управления интегрируют скорость вращения космического аппарата вокруг первой оси и формируют управляющее воздействие вокруг первой оси космического аппарата по разности между интегралом скорости вращения вокруг первой оси и разности между текущим курсовым углом, рассчитанным по баллистической информации, и запомненным значением. курсового угла, рассчитанного по баллистической информации, на момент начала особого участка.
При прохождении больших и малых углов Солнце - космический аппарат - Земля проводят упреждающие программные развороты вокруг первой оси космического аппарата на участках орбиты, симметричных относительно точек орбиты, в которых угол Солнце - космический аппарат - Земля максимален или минимален. Это позволяет уменьшить погрешность отслеживания плоскости Солнце - космический аппарат - Земля, что приводит к уменьшению величины непрогнозируемого движения центра масс КА. После проведения упреждающего разворота КА осуществляет работу по логике, описанной выше до завершения особого участка орбиты.
При потере ориентации на Землю или при ее отсутствии при неподвижных панелях солнечных батарей, нормаль к рабочей поверхности которых параллельна второй оси КА, осуществляется поддержание ориентации второй оси КА на Солнце путем последовательного формирования скорости относительно первой оси космического аппарата при одновременном формировании нулевой скорости относительно третьей оси и формирования скорости относительно третьей оси космического аппарата при одновременном формировании нулевой скорости относительно первой оси по информации с БИС в зависимости от величины и знака производной сигнала, поступающего с панелей солнечных батарей. При этом осуществляется разворот КА относительно второй оси с поисковой скоростью по информации с БИС. При попадании Земли в поле зрения ПОЗ к управлению относительно второй и третьей осей КА подключается ПОЗ, и разрешается включение привода солнечных батарей по баллистической информации. После этого космический аппарат переходит в режим работы по целевому назначению, и логика ориентации КА осуществляется по алгоритму работы описанному выше.
При потере ориентации на Солнце или при ее отсутствии осуществляется установка нормали к рабочей поверхности СБ параллельно второй оси КА. Затем осуществляется разворот КА с поисковой скоростью относительно первой оси при поддержании скоростей, близких к нулю, относительно второй и третьей осей КА до появления сигнала, поступающего с панелей солнечных батарей. Далее осуществляется ориентация второй оси КА на Солнце путем формирования и поддержания скорости вращения относительно первой оси КА по информации с БИС до момента уменьшения сигнала, поступающего с панелей СБ с последующим формированием нулевой скорости относительно первой оси КА. Затем осуществляют формирование и поддержание скорости вращения относительно третьей оси до момента уменьшения сигнала, поступающего с панелей СБ с последующим формированием нулевой скорости относительно третьей оси КА. После этого осуществляется поддержание ориентации второй оси КА на Солнце путем последовательного формирования скорости относительно первой оси КА при одновременном формировании нулевой скорости относительно третьей оси и формирования скорости относительно третьей оси КА при одновременном формировании нулевой скорости относительно первой оси. Величина и знак скорости по каждой из осей зависит от величины и знака производной сигнала, поступающего с панелей СБ.
После окончания режима ориентации на Солнце разрешается включение режима ориентации на Землю, по окончанию которого КА переходит в режим работы по целевому назначению.
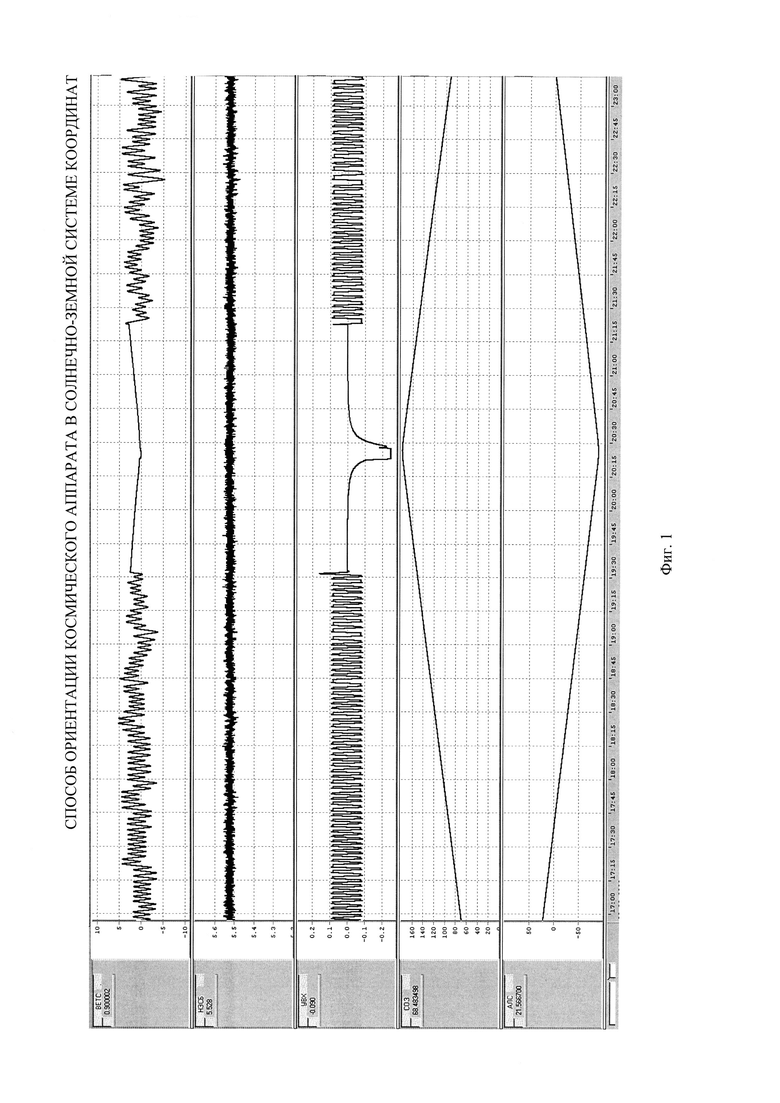
На фиг. 1 представлены результаты моделирования движения КА при угле между плоскостью орбиты и направлением на Солнце 0° в режиме работы по целевому назначению при прохождении больших углов СОЗ,
где:
ВЕТС - угол между направлением на Солнце и плоскостью, проходящей через первую и вторую оси КА, [°];
НЭСБ - сигнал, поступающий с панелей СБ, [В];
УВХ - скорость вращения КА вокруг первой оси, [°/c];
СОЗ - угол Солнце - космический аппарат - Земля, [°];
АЛС - угол между второй осью КА и проекцией направления на Солнце на плоскость, проходящую через первую и вторую оси КА, [°].
Из фиг. 1 видно, что погрешность ориентации нормали к рабочей поверхности СБ на Солнце в режиме работы по целевому назначению не будет превышать 5°, при этом погрешность ориентации на Землю зависит от погрешности ПОЗ.
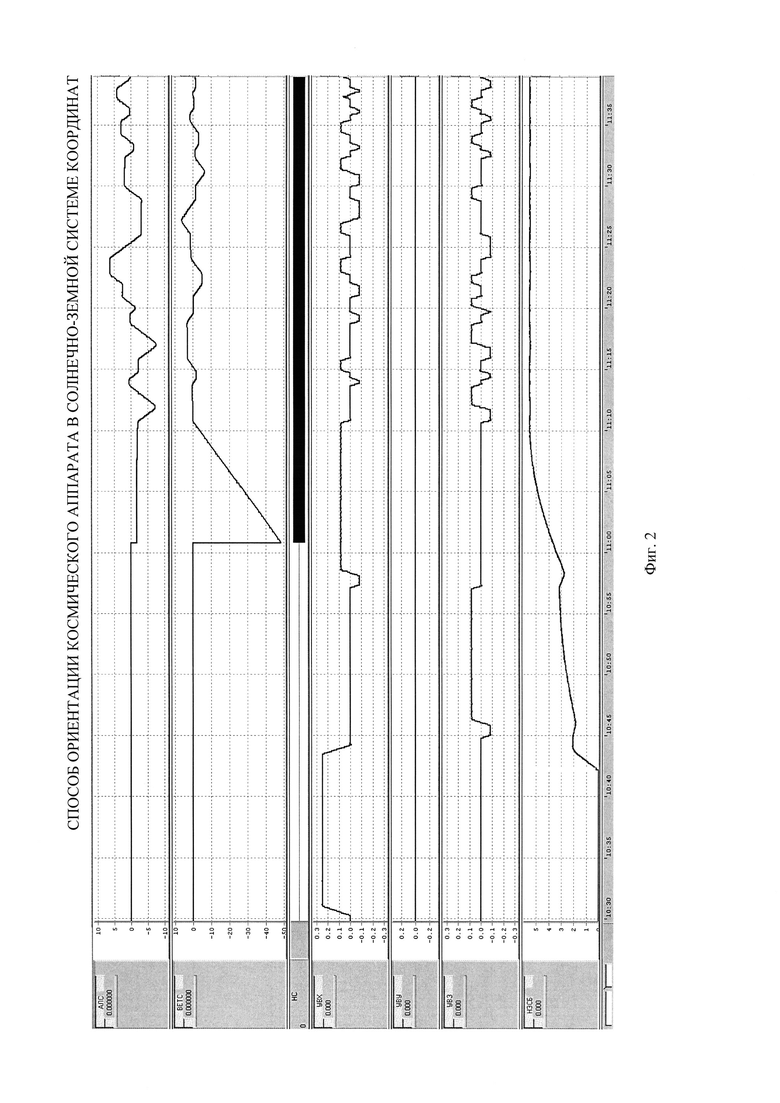
На фиг. 2 представлены результаты моделирования движения КА в режиме ориентации на Солнце,
где:
АЛС - угол между второй осью КА и проекцией направления на Солнце на плоскость, проходящую через первую и вторую оси КА, [°];
ВЕТС - угол между направлением на Солнце и плоскостью, проходящей через первую и вторую оси КА, [°];
НС - наличие Солнца в диапазоне углов АЛС±92° и ВЕТС±48°;
УВХ - скорость вращения КА вокруг первой оси, [°/c];
УВУ - скорость вращения КА вокруг второй оси, [°/c];
УВЗ - скорость вращения КА вокруг третьей оси, [°/c];
НЭСБ - сигнал, поступающий с панелей СБ, [В];
Из фиг. 2 видно, что при попадании Солнца на панели СБ КА начинает отрабатывать рассогласование между нормалью к рабочей поверхности СБ и направлением на Солнце.
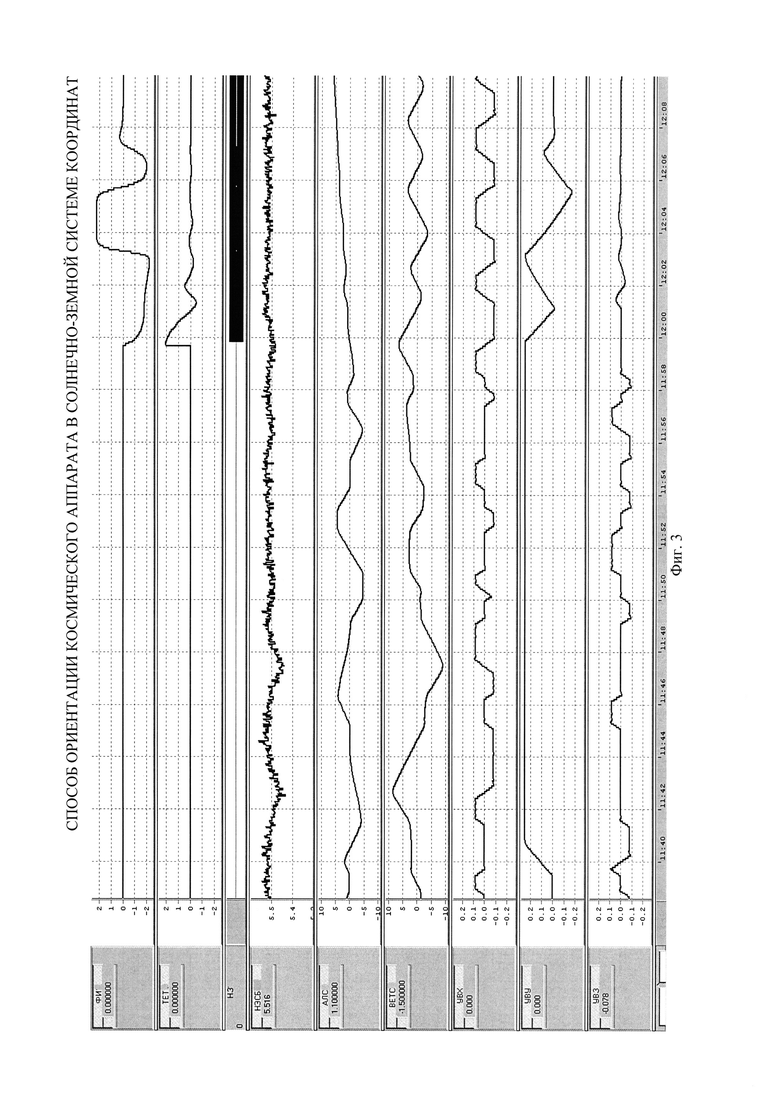
На фиг. 3 представлены результаты моделирования движения КА в режиме начальной ориентации на Землю,
где:
ФИ - угол между направлением на центр Земли и плоскостью, проходящей через первую и вторую оси КА, [°];
ТЕТ - угол между первой осью КА и проекцией направления на Землю на плоскость, проходящую через первую и вторую оси КА, [°];
НЗ - наличие Земли в поле зрения ПОЗ;
НЭСБ - сигнал, поступающий с панелей СБ, [В];
АЛС - угол между второй осью КА и проекцией направления на Солнце на плоскость, проходящую через первую и вторую оси КА, [°];
ВЕТС - угол между направлением на Солнце и плоскостью, проходящей через первую и вторую оси КА, [°];
УВХ - скорость вращения КА вокруг первой оси, [°/c];
УВУ - скорость вращения КА вокруг второй оси, [°/c];
УВЗ - скорость вращения КА вокруг третьей оси, [°/c];
Из фиг. 3 видно, что ориентация КА на Землю осуществляется при постоянном поддержании ориентации панелей СБ на Солнце.
Начальное значение каждого параметра на фиг. 1-3 приведено под его обозначением.
Такой способ ориентации космического аппарата в солнечно-земной системе координат позволяет обеспечить ориентацию солнечных батарей на Солнце, при отсутствии или неисправности прибора ориентации на Солнце.
Предложенный способ ориентации космического аппарата в солнечно-земной системе координат, применяется на космических аппаратах системы «ГЛОНАСС».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2017 |
|
RU2671598C1 |
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2680356C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2325311C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО СПУТНИКА | 2014 |
|
RU2569999C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322374C2 |
| Способ ориентации космического аппарата | 2020 |
|
RU2735120C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325312C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2340518C2 |
| Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата | 2018 |
|
RU2724216C2 |
Изобретение относится к управлению ориентацией космического аппарата (КА) с солнечными батареями (СБ). Способ включает ориентацию первой оси КА на центр Земли путем его разворотов вокруг второй и третьей осей по информации с прибора ориентации на Землю. Ориентацию второй оси КА относительно плоскости Солнце - КА - Земля проводят путем создания и поддержания скорости вращения вокруг первой оси КА по информации с блока измерения угловых скоростей. Изменяют знак этой скорости каждый раз при уменьшении сигнала с панелей СБ. Нормаль к поверхности СБ совмещают с направлением на Солнце путем разворота панелей СБ вокруг оси, параллельной третьей оси КА по расчетной баллистической информации с использованием привода солнечных батарей. На особых участках орбиты: при малых и больших углах Солнце - КА - Земля управляют вращением КА вокруг первой оси по баллистической информации и интегралу от скорости указанного вращения (курсовому углу). Техническим результатом изобретения является обеспечение рабочей ориентации панелей СБ при неисправности прибора ориентации на Солнце. 1 з.п. ф-лы, 3 ил.
1. Способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси космического аппарата с плоскостью Солнце - космический аппарат - Земля и разворот панелей солнечных батарей вокруг оси, параллельной третьей оси космического аппарата, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода солнечных батарей, отличающийся тем, что при неисправности прибора ориентации на Солнце ориентацию второй оси космического аппарата относительно плоскости Солнце - космический аппарат - Земля проводят путем создания и поддержания скорости вращения вокруг первой оси космического аппарата по информации с блока измерения угловых скоростей, изменяют знак скорости вращения вокруг первой оси космического аппарата каждый раз при уменьшении сигнала, поступающего с панелей солнечных батарей, совмещают нормаль к поверхности солнечных батарей с направлением на Солнце путем разворота панелей солнечных батарей относительно оси, параллельной третьей оси космического аппарата, по расчетной баллистической информации с использованием привода солнечных батарей.
2. Способ ориентации космического аппарата в солнечно-земной системе координат по п. 1, отличающийся тем, что при прохождении особых участков орбиты, включающих участки малых углов Солнце - космический аппарат - Земля и больших углов Солнце - космический аппарат - Земля, запоминают курсовой угол, рассчитанный по баллистической информации на момент начала особого участка, интегрируют скорость вращения космического аппарата вокруг первой оси с момента начала особого участка орбиты, формируют управляющее воздействие вокруг первой оси космического аппарата по разности между интегралом скорости вращения вокруг первой оси космического аппарата и разности между текущим курсовым углом, рассчитанным по баллистической информации, и запомненным значением курсового угла, рассчитанного по баллистической информации, на момент начала особого участка, при прохождении больших и малых углов Солнце - космический аппарат - Земля проводят упреждающие программные развороты вокруг первой оси космического аппарата на участках орбиты, симметричных относительно точек орбиты, в которых угол Солнце - космический аппарат - Земля максимален или минимален.
| А.М | |||
| Климарев, Ю.А | |||
| Тентилов и др | |||
| Бигиродинная система ориентации космического аппарата на высокоэллиптической орбите | |||
| В сб.: Космические вехи: сб | |||
| научных трудов, посв | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| акад | |||
| М.Ф | |||
| Решетнева | |||
| Красноярск | |||
| ИП СуховольскаяЮ.П., 2009 | |||
| с | |||
| Способ применения резонанс конденсатора, подключенного известным уже образом параллельно к обмотке трансформатора, дающего напряжение на анод генераторных ламп | 1922 |
|
SU129A1 |
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2414392C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| US 6142422 A, 07.11.2000 | |||
| US 4759517 A, 26.07.1988. | |||

