Область техники
Изобретение относится к космической технике, а именно к способу автономного определения параметров орбиты космических аппаратов при движении вокруг тяготеющего (тела) центра, такого как Солнце, Земля, Луна, другие планеты и крупные спутники Солнечной системы.
Уровень техники
Из уровня техники известен способ определения параметров орбиты небесного тела или космического аппарата (далее КА) по серии позиционных наблюдений [1-3].
Позиционными называют наблюдения, в результате которых определяются видимые положения объекта на небесной сфере, т.е. направление на него. Наиболее распространенный способ проведения позиционных наблюдений - получение кадра с изображением участка небесной сферы включающего измеряемый объект и, одновременно, нескольких звезд с известными координатами. Сравнение положения измеряемого объекта с положениями звезд с известными координатами позволяет определить видимые координаты объекта на небесной сфере в момент проведения наблюдения.
По невозмущенной орбите космический объект движется в идеализированной ситуации, сферически симметричного поля тяготения с ньютоновским потенциалом [2], а какие-либо другие силы на космический объект не действуют. Эта траектория имеет вид плоского конического сечения (окружности, эллипса, параболы или гиперболы) один из фокусов которого совпадает с центром тяготения. Форма орбиты и ее положение в пространстве описывается шестью параметрами (элементами), например, так называемым Кеплеровским набором элементов: большая полуось а, эксцентриситем е, наклонение плоскости орбиты i, долгота восходящего узла орбиты Ω, аргумент перицентра ω и средняя аномалия M0. (Возможны и другие равноценные наборы элементов орбиты.) Значения элементов невозмущенной орбиты не меняются со временем. При определении параметров орбиты по наблюдениям с конечной точностью каждый из элементов орбиты будет определяться с некоторой погрешностью.
При отклонении поля тяготения от ньютоновского (например, из-за сплюснутости тяготеющего тела) или при наличии внешних возмущающих сил (тяготение других тел, давление излучения и т.д.) тело будет двигаться по возмущенной траектории, элементы которой меняются [3]. Орбита считается слабо возмущенной, если ее элементы изменяются на характерных временных много больших орбитального периода.
Для проведения позиционных наблюдений необходим инструмент для проведения оптических наблюдений звезд, например, телескоп или камера с фотопластинкой или матричным приемником излучения, а также часы для фиксации моментов проведения позиционных наблюдений.
Помимо этого, необходимо иметь следующую априорную информацию:
1. В поле тяготения какого именно тела движется объект;
2. В каких точках пространства xi находился наблюдатель в моменты ti проведения позиционных измерений (i - номер наблюдения в серии).
Результаты полученных измерений обрабатываются с помощью одного из классических алгоритмов определения орбит [1-3]: метод Лагранжа-Гаусса, метод Лапласа, метод Ольберса или их модификации.
Если число позиционных измерений меньше трех - определить параметры орбиты не представляется возможным. Три позиционных измерения (наблюдения) позволяют определить параметры невозмущенной орбиты. Более чем три наблюдения позволяют определить, как параметры невозмущенной орбиты, так и их погрешности. Если число наблюдений много больше трех, то можно определить, как параметры траектории орбиты, так и их возмущения - изменение этих параметров со временем.
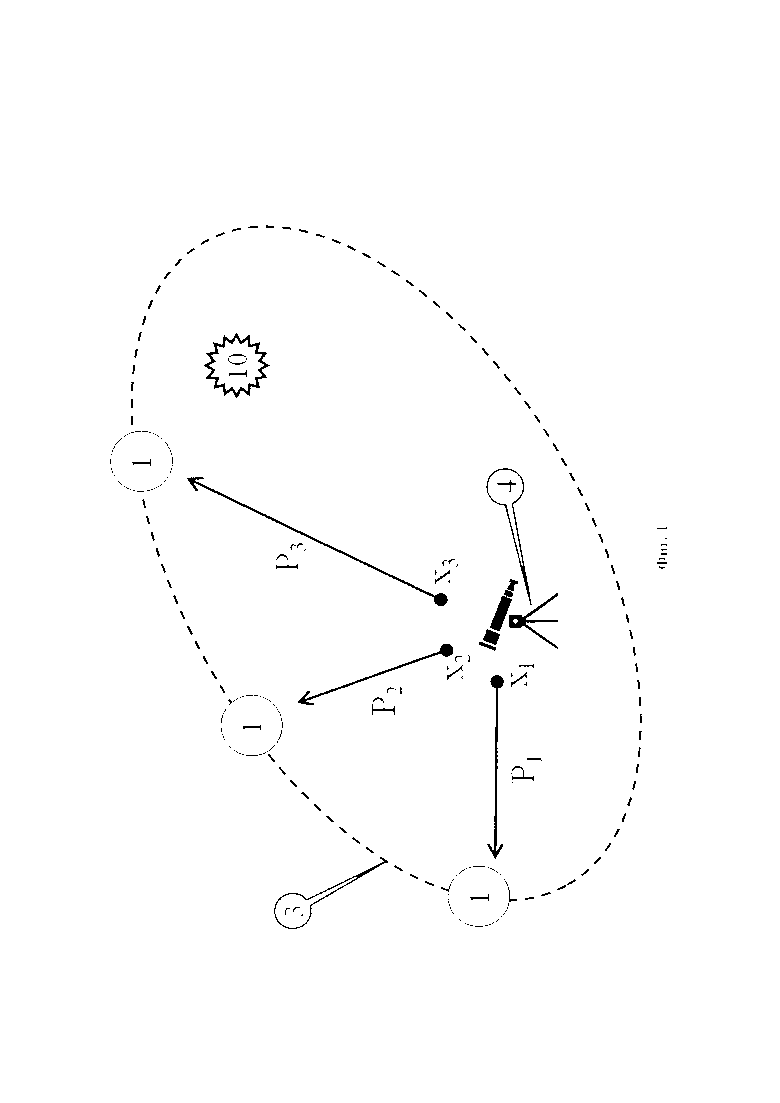
Наблюдения проводятся с помощью телескопа в последовательные моменты времени t1, t2 и t3. Положения наблюдателя х1, х2 и х3 в моменты наблюдений считаются известными. Результатами наблюдений являются единичные вектора видимых положений тела Р1, Р2 и Р3 (направленные на его центр), параметры орбиты которого определяется. По этим данным: (t1, x1, P1), (t2, x2, Р2) и (t3, х3, Р3) с помощью метода Лагранжа-Гаусса, метода Лапласа, метода Ольберса [1-3] (одного из них) определяются Кеплеровские элементы невозмущенной орбиты тела (а, е, i, Ω, ω, М0). (Фиг. 1)
Чаше всего определяют параметры орбит искусственных спутников Земли (ИСЗ). Для этого используются оптические телескопы, установленные на поверхности Земли. Затем параметры орбиты по каналу связи передаются на борт соответствующего ИСЗ. Однако, проведения наблюдений с Земли днем или в пасмурную погоду невозможно. Быстрый рост числа ИСЗ вокруг Земли приводит к перегрузке пунктов проведения позиционных измерений. В итоге определяются орбиты не всех ИСЗ и не так часто, как это требуется.
Из уровня техники (US 4618259 А, кл. B64G 1/36; G01C 1/00; опубликовано 21.10.1986) известна комбинированная солнечно-звездная система для контроля ориентации и положения космического аппарата. Система включает в себя датчик изображения звезды, имеющий первый объектив и первую матрицу детекторов, расположенных в фокальной плоскости. Объектив выполнен для регистрации хорошо определенной аберрации (отклонения от пути) таким образом, чтобы преобразовать точку, как объект в определенном место или область, имеющее диаметр, больший, чем диаметр элемента детекторной матрицы. Датчик Солнца имеет обычный объектив, и вторую матрицу детекторов, расположенную в плоскости изображения этого объектива. Эти две детекторные матрицы имеют схожую конструкцию и одинаковое количество детекторных элементов, и поочередно подключены к одному электронному оценивающему устройству.
Однако система не позволяет определять положение космического аппарата (КА) в пространстве или параметры орбиты, по которой он движется.
Также из уровня техники (US 6622970 В2, кл. B64G 1/36; опубликовано 23.09.2003) известен способ и устройство для автономной навигации для дальних космических полетов с использованием Солнца в качестве ориентира и определения орбиты космического аппарата на основе наблюдений Солнца с помощью расположенных на аппарате устройств. В результате наблюдений получают два типа данных: направление на космический аппарат относительно Солнца в зависимости от времени и допплеровского смещение длин волн солнечного излучения из-за радиального движения космического аппарата относительно Солнца. Эти данные могут быть использованы для определения орбиты космического аппарата.
Также в источнике раскрыта двойная система визуализации, которая функционирует как устройство отображения Солнца на фоне звезд во время фазы межпланетного перелета и в качестве обычного оптического прибора для получения изображения планетарного тела во время фазы сближения с ним.
Недостатками вышеуказанного способа является большая сложность и стоимость аппаратуры для изменения радиальной скорости КА относительно Солнца и меньшая точность этих измерений. Описанный способ позволяет определять орбиту только вокруг Солнца, а для КА, обращающихся вокруг Земли, Луны, других планет данный способ не эффективен.
Технической проблемой является низкая точность определения орбиты КА вокруг Солнца с возможностью определения орбиты вокруг других тел солнечной системы (Земли, Луны, планет).
Раскрытие изобретения
Техническим результатом заявляемого изобретения является обеспечение возможности определения параметров орбиты КА вокруг Солнца автономным образом с высокой точностью, и возможность определения орбиты вокруг других тел солнечной системы (Земли, Луны, планет).
Технический результат достигается за счет того, что способ автономного определения параметров орбиты космического аппарата выполняют посредством следующих этапов:
1) - проводят измерения показаний Zi посредством по меньшей мере одного звездного датчика и показаний Oi посредством по меньшей мере одного датчика направления на объект одновременно в момент времени t, определяемый по бортовым часам, синхронизированным с бортовым временем космического аппарата, после чего передают эти измерения в блок обработки данных;
2) - вычисляют ориентацию конструкционных осей 
где  - матрица трехмерного поворота, описывающая мгновенную ориентацию i-го звездного датчика относительно системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой;
- матрица трехмерного поворота, описывающая мгновенную ориентацию i-го звездного датчика относительно системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой;
3) - производят вычисление среднего значения <U> ориентации конструкционных осей системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой, относительно инерциальной системы координат по показаниям всех звездных датчиков;
4) - вычисляют направления  на центр тяготеющего объекта относительно системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой, по формуле:
на центр тяготеющего объекта относительно системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой, по формуле:
где  - матрица трехмерного поворота, описывающая мгновенную ориентацию i-го датчика направления на тяготеющий объект относительно системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой;
- матрица трехмерного поворота, описывающая мгновенную ориентацию i-го датчика направления на тяготеющий объект относительно системы координат, связанной с устройством, космическим аппаратом или целевой аппаратурой;
5) производят вычисление среднего по всем датчикам значения <O*> направления на объект в системе координат, связанной с устройством, космическим аппаратом или целевой аппаратурой;
6) определяют среднее направление на тяготеющий объект в инерциальной системе координат в виде единичного вектора I* по формуле:
I*=<O*>×<Z*>
7) после чего определяют единичный вектор Р, противоположный по направлению вектору I*:
Р = -I*,
8) запоминают в блок обработки данных единичный вектор Pk и момент проведения измерений tk, при этом k - это номер измерения;
9) производят повторение этапов 1) - 8) до получения по меньшей мере трех последовательных значений Р;
10) к полученным значениям Р применяют алгоритм получения параметров орбиты по серии позиционных наблюдений. Дополнительно в момент времени t проводят измерения показаний по меньшей мере шести сенсоров смещения, встроенных в механические основания датчиков, и на основе этих показаний вычисляют матрицы малых 3-мерных поворотов δQi, описывающих малые отклонения под действием внешних сил и термоупругих деформаций конструкций КА каждого из датчиков от исходных положений, а матрицу трехмерного поворота Qi* рассчитывают по формуле:
 ,
,
где Qi - известная невозмущенная матрица поворота,
Этап 4) может быть выполнен с использованием матрицы трехмерного поворота Qi* совпадающей с априорно известной матрицей поворота Qi:
 .
.
Среднее значения <Z*> ориентации конструкционных осей системы координат, связанной с космическим аппаратом или целевой аппаратурой, относительно инерциальной системы координат по показаниям одного звездного датчика равно его показаниям Z*:
<Z*>=Z*
Среднее направление на объект <O*> при присутствии объекта в поле зрения только одного датчика направления на объект равно показаниям О*:
<O*>=О*
Алгоритм получения параметров орбиты по серии позиционных наблюдений осуществляют методом Лагранжа-Гаусса или методом Лапласа, или методом Ольберса, или их модификациями.
Термин «автономный» означает, что определение параметров орбиты производится только на основе показаний приборов, установленных на борту КА без использования данных полученных на других КА или на наземных наблюдательных пунктах.
Для измерений на борту КА используются датчики, погрешность измерения которых сравнима с погрешностью инструментов, с помощью которых производятся классические позиционные измерения с Земли. Таким образом, погрешность автономных измерений будет сравнима с погрешностью наиболее точных на сегодняшний день наземных позиционных измерений.
Краткое описание чертежей
Изобретение поясняется чертежами.
На фиг. 1 представлен способ определения элементов орбиты (3) естественного или искусственного небесного тела (1), обращающегося вокруг тяготеющего объекта (10) (например, Солнца), по трем позиционным наблюдениям, выполненным с помощью телескопа (4).
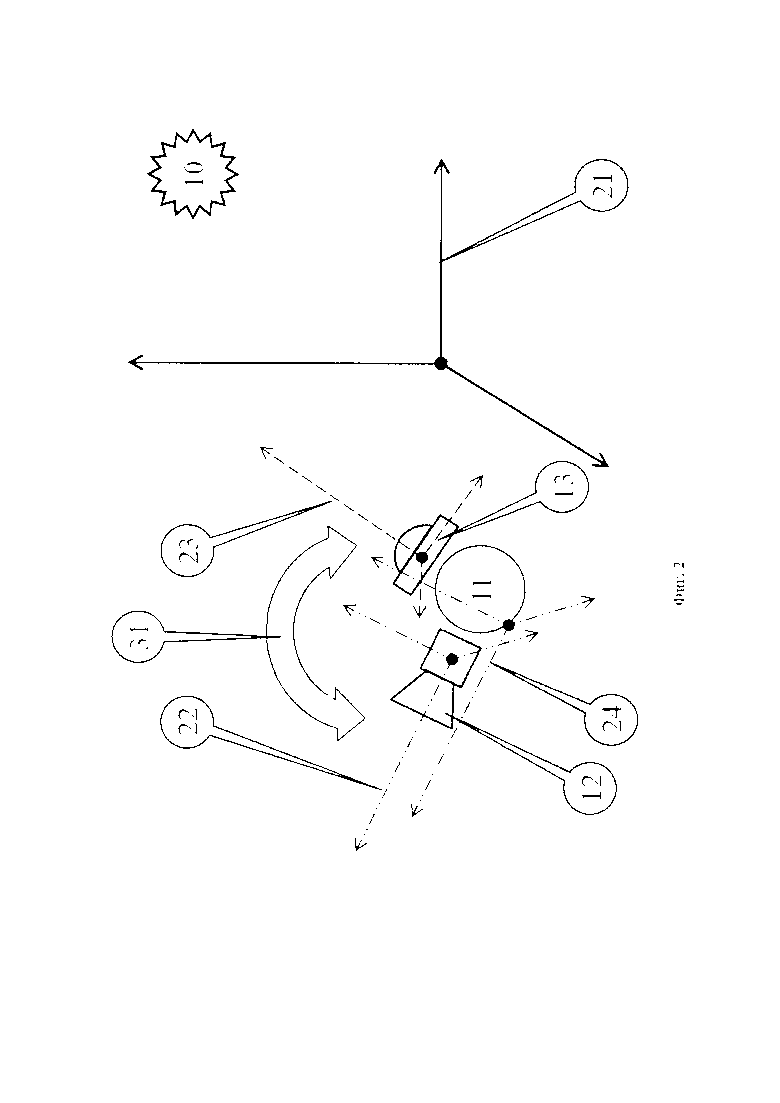
На фиг. 2 схематично показан КА (11) с устройством, включающим звездный датчик (ЗД) (12) и датчик направления на тяготеющий объект (ДНО) (13) (тяготеющий объект - (10)), на борту и введенные системы координат: связанные с ЗД (22) и ДНО (23) и инерциальная (21). На чертеже предполагается, что системы координат ЗД (22) и система координат устройства (24) совпадают.
(31) обозначает матрицу перехода между системами координат ЗД (22) (или устройства (24)) и ДНО (23), которая считается априори известной.
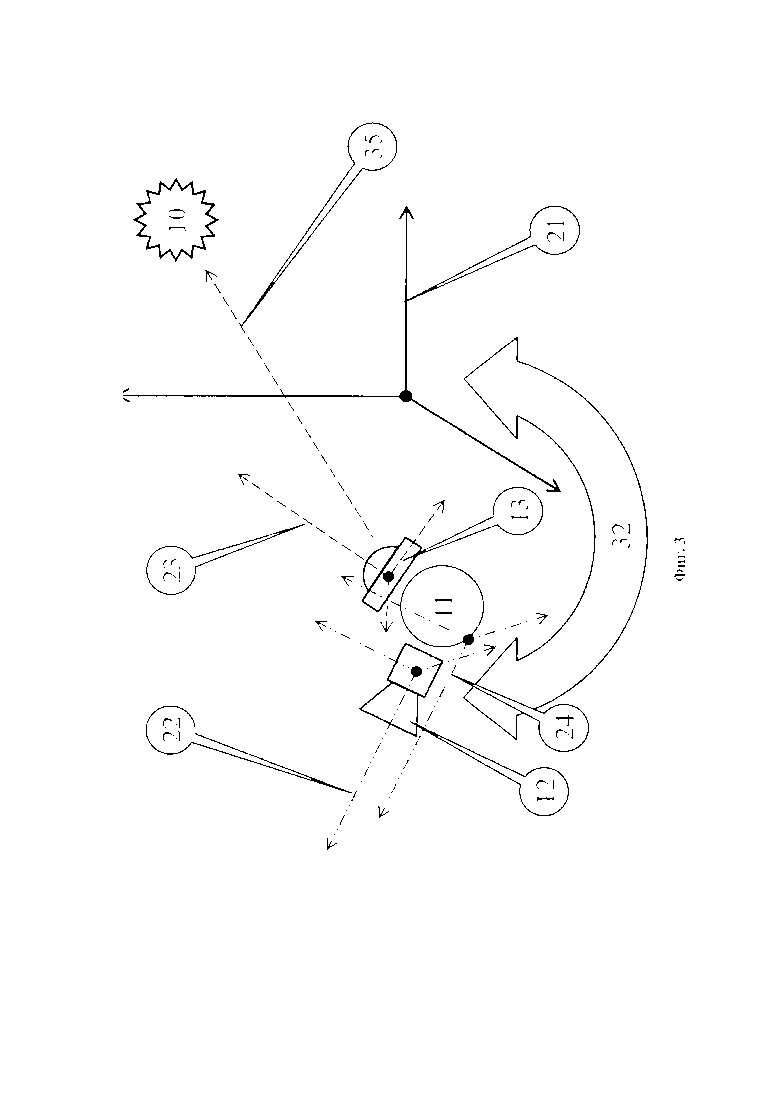
На фиг. 3 показаны результаты, получаемые непосредственно из измерений, проведенных датчиками на борту КА (11).
По измерениям ЗД (12) определяется матрица перехода (32) между системой координат ЗД (22) (устройства (24)) и инерциальной системой координат (21). По измерениям ДНО (13) определяется вектор направления (35) на центр тяготеющего объекта (10) в системе координат ДНО (23).
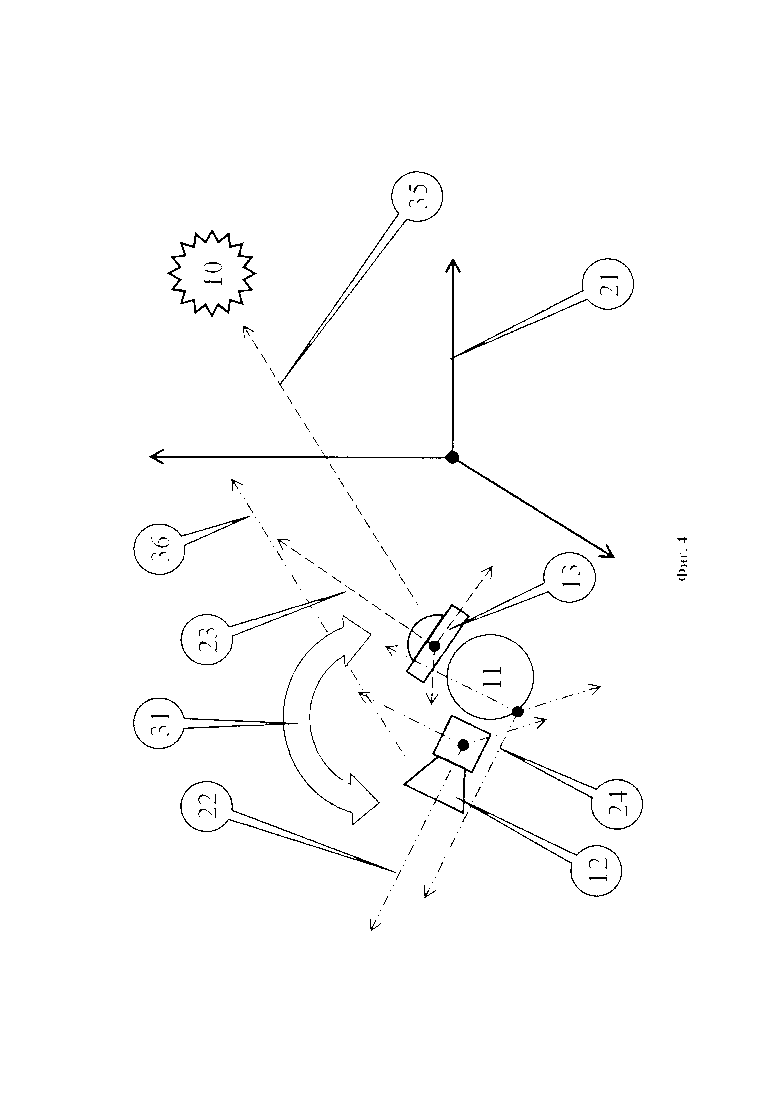
На фиг. 4 показано получение вектора направления (36) на центр тяготеющего объекта (10) в системе координат ЗД (22) (устройства (24)). Вектор (36) получается по вектору направления на центр тяготеющего объекта в системе координат ДНС (35), полученному по измерениям ДНС (13) (см. фиг. 3), с помощью известной матрицы перехода (31) между системами координат ЗД (22) и ДНО (23).
На фиг. 5 показано получение вектора направления на центр Солнца в инерциальной системе координат (вектор I) (37) по вектору направления на центр Солнца в системе координат ЗД (36) с помощью матрицы перехода (32) между системой координат ЗД (22) (устройства (24)) и инерциальной системой координат (21), определенной ЗД (12) в этом наблюдении.
На фиг. 6 показаны вектора видимых направлений на центр Солнца I1, I2 и I3 с борта КА (11), движущегося по орбите (3) вокруг тяготеющего объекта (10), полученные в результате трех последовательных наблюдений, проведенных с помощью устройства в моменты времени t1, t2, t3.
На фиг. 7 показано получение векторов видимых положений КА P1, Р2, Р3, (38) «фиктивным наблюдателем» расположенным в центре тяготеющего объекта в моменты времени t1, t2 и t3.
К этим данным: (t1, s1, P1), (t2, s2, Р2) и (t3, s3, Р3), где si - положение центра тяготеющего объекта в пространстве в момент ti, можно применить метода Лагранжа-Гаусса, метод Лапласа или метод Ольберса [1-3] и определить Кеплеровские элементы (а, е, i, Ω, ω, M0) невозмущенной орбиты (3) КА (11) вокруг тяготеющего объекта (10).
На фиг. 8 представлен прототип механического основания устройства с системой геометрического контроля (44) имеющий вид треугольной пирамиды для установки на ее боковые грани двух ЗД и одного ДНС (например, датчика направления на Солнце - СД) с встроенными в нее сенсорами смещений.
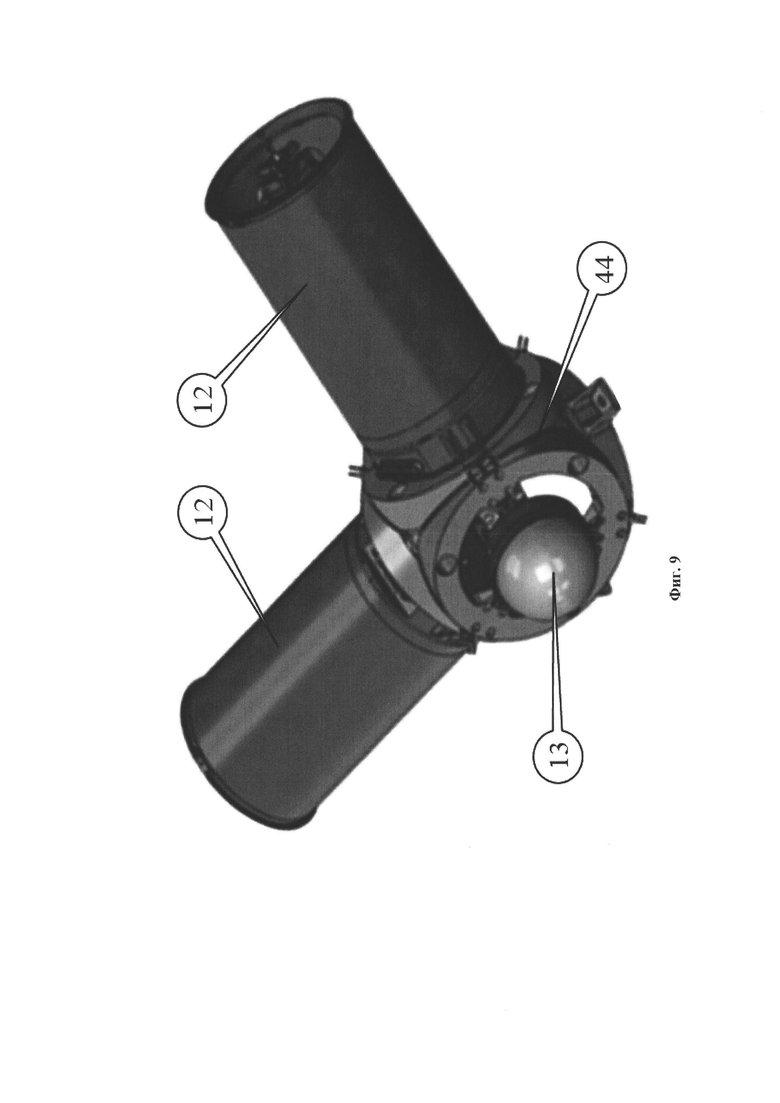
На фиг. 9 представлен прототип устройства, состоящего из механического основания с системой геометрического контроля (44) на боковых гранях которого установлены два ЗД (12) и один СД (13) (блок обработки данных и соединительные кабели не показаны).
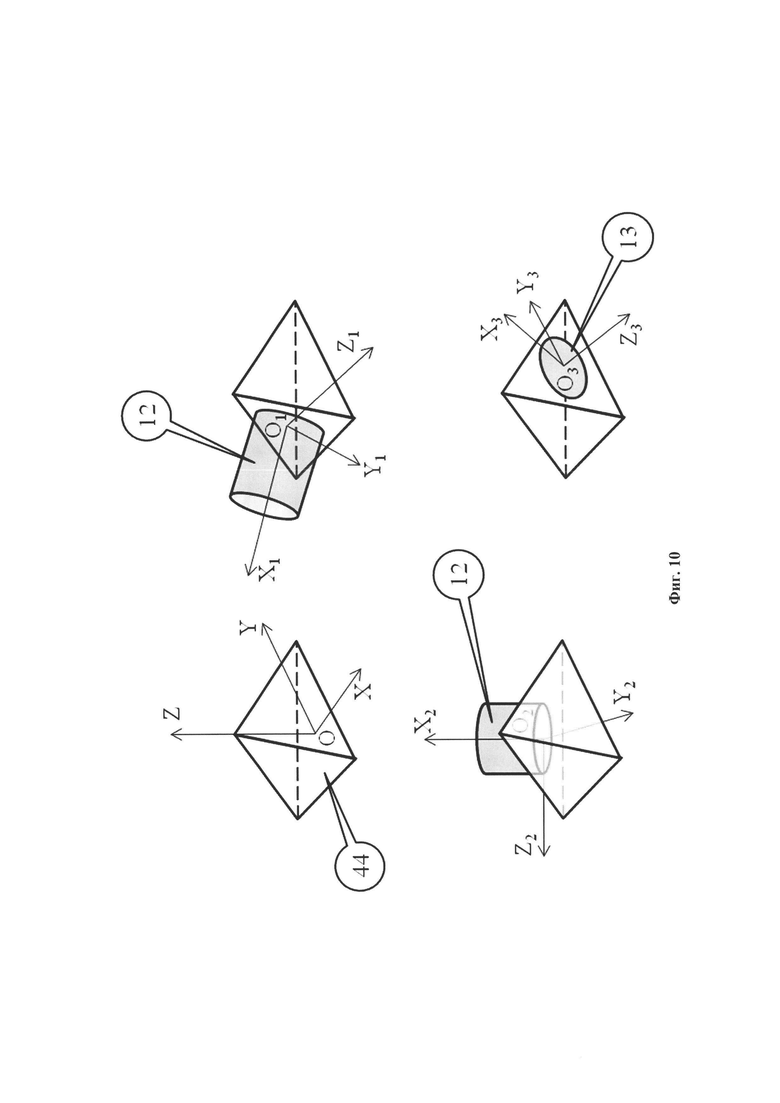
На фиг. 10 показаны системы координат, введенные в примере реализации 1. Верхний левый фрагмент: OXYZ - система координат (24) устройства (механического основания (44)); верхний правый фрагмент - O1X1Y1Z1 - система координат (22) первого ЗД (12); нижний левый фрагмент - O2X2Y2Z2 - система координат (22) второго ЗД (12); нижний правый фрагмент - O3X3Y3Z3 - система координат (23) ДНО (13).
Позициями в тексте и на фигурах обозначены:
(1) - небесное тело, обращающееся вокруг тяготеющего объекта;
(3) - траектория (орбита) небесного тела;
(4) - наблюдатель с телескопом для проведения позиционных наблюдений;
(10) - тяготеющий объект - Солнце;
(11) - космический аппарат;
(12) - звездный датчик ориентации (ЗД);
(13) - датчик направления на объект - ДНО (в частном случае датчик направления на Солнце - СД или датчик геовертикали - ГВ);
(21) - инерциальная система координат;
(22) - система координат звездного датчика (которая совпадает с системой координат устройства);
(23) - система координат солнечного датчика;
(24) - система координат устройства;
(30) - переходы (матрицы поворота) между системами координат устройства и каждого из датчиков (ЗД или СД);
(31) - переход (матрица поворота) между системами координат ЗД и СД;
(32) - переход (матрица поворота) между системой координат ЗД (и устройства) и инерциальной СК;
(35) - вектор направления на Солнце в системе координат СД;
(36) - вектор направления на Солнце в системе координат ЗД (устройства);
(37) - вектор направления на Солнце в инерциальной системе координат;
(38) - вектор направления из центра Солнца на КА в инерциальной системе координат;
(40) - нижняя грань основания для его крепления к КА;
(41) - боковые грани основания для установки ЗД или ДНО;
(42) - элементы креплений;
(43) - датчики смещений (сдвигов);
(44) - механическое основание устройства с системой геометрического контроля.
Осуществление изобретения
Рассмотрим сначала задачу об автономном определении орбиты для межпланетного космического аппарата (11), обращающегося вокруг тяготеющего объекта (10), например, Солнца.
На борту КА устанавливают по меньшей мере один звездный датчик ориентации (12) (далее ЗД), и по меньшей мере один датчик направления на тяготеющий объект (13) (ДНО), а также бортовые часы и блок обработки данных, которые связаны с датчиками (ЗД и ДНО) соединительными проводами (кабелями). Датчики направления на объект (13) должны определять направление на центры тяготеющих объектов вокруг которых обращается КА с установленным устройством: на Солнце (солнечный датчик - СД), Землю, Луну, Марс, Юпитер и т.д. Так как в качестве примера рассматривается КА (11) обращающийся вокруг Солнца (10), то в качестве ДНО используем датчик направление на солнце - СД. Взаимное положение всех ЗД и СД друг относительно и относительно КА считается известным. КА.
Звездный датчик ориентации (12) - оптический прибор, который по наблюдениям звезд определяет ориентацию (разворот) своих конструкционных осей (22) относительно инерциальной системы координат (21), связанной с удаленными звездами. Современные ЗД имеют вид камеры с матричным приемником излучения и специальным программным обеспечением, частью его является бортовой каталог навигационных звезд. ЗД экспонирует и считывает кадр с изображением участка звездного неба. В кадре выделяются изображения звезд, определяются положения их фотоцентров в системе с координат (22), связанной с матричным приемником излучения. Затем проводится отождествление изображений звезд в кадре со звездами из бортового каталога. По отождествленным звездам, для которых известны как координаты относительно фотоприемника и ЗД (полученные при обработке кадра), так и небесные координаты (из каталога), определяется ориентации системы координат ЗД (22) относительно инерциальной системы координат (21) в виде кватерниона поворота, матрицы трехмерного поворота, трех углов Эйлера или в других эквивалентных представлениях.
Современный ЗД может определить свою ориентацию по любому фрагменту неба, попадающему в поле зрения ЗД. Точность параметров ориентации, определяемых ЗД с описанной выше конструкцией, неодинакова. Наименьшую погрешность имеют две координаты центра поля зрения ЗД (центра кадра), третий параметр - угол разворота ЗД относительно оси визировании - определяется существенно хуже, причем погрешность тем больше, чем уже поле зрения ЗД.
Датчик направления на Солнце (13) - оптический прибор, который определяет направление на центр диска Солнца (10) относительно своих конструкционных осей. СД функционирует только когда Солнце находится в пределах поля зрения прибора. Направление на центр Солнца выдается в виде вектора направления, в виде направляющих косинусов, в виде пары углов сферических координат или в других эквивалентных представлениях.
Рассмотрим процедуру измерения с помощью устройства: ЗД и СД, установленные на борту КА (11), одновременно проводят свои измерения, результатом которых являются: для ЗД - параметры ориентации (разворота) (32) конструкционных осей ЗД (22) относительно инерциальной системы координат (21), связанной со звездами, а для СД - направление на центр Солнца (35) относительно конструкционных осей СД (23). Момент проведения измерений t фиксируют бортовые часы.
Поскольку взаимное положение ЗД и СД известно (например, задана матрица трехмерного поворота (31), переводящая конструкционные оси СД (23) в конструкционные оси ЗД (22)), то можно вычислить вектор (37) направления на Солнце в инерциальной системе координат (21) (той же, к которой привязываются параметры ориентации (32), определяемые ЗД). Этот вектор I (37) направлен от КА на центр Солнца (10). Противоположный ему вектор Р (38) определяет направление из центра Солнца в точку положения КА в момент проведения измерений t. Это направление совпадает с результатами позиционных измерений видимого положения КА (11), проведенных в момент t фиктивным наблюдателем, находящимся в центре Солнца. Для получения вектора Р (38) необходимо изменить знаки всех трех координат исходного вектора видимого положения Солнца в инерциальной системе координат I (37) на противоположные.
Последовательная серия Р1, Р2, Р3, … подобных измерений может быть обработана одним из алгоритмов определения параметров орбиты: методом Лагранжа-Гаусса, Лапласа, Ольберса или их модификациями [1-3].
Априорная информация, необходимая для этих алгоритмов также известна: 1) КА (11) движется в поле тяготения Солнца (10); 2) «фиктивный наблюдатель», проводивший позиционные наблюдения КА, располагается в центре Солнца (10).
Три последовательных измерения описанных выше позволяют определить шесть параметров невозмущенной орбиты (3) КА (11). Более чем три наблюдения позволяют определить, как параметры орбиты (3), так и их погрешности. Если число наблюдений много больше трех, то можно определить, как параметры орбиты, так и их возмущения - изменение этих параметров со временем.
Отметим, что проведение реальных позиционных измерений положения КА может быть невозможным, например, если КА покрыт поглощающим излучение Солнца покрытием, если КА обращается вблизи Солнца, если КА находится в тени Земли и т.д.
Погрешность определения параметров орбиты зависит от точности проведения измерений ЗД и СД. Современные ЗД имеют точность 1”-3” (угловые секунды), современные СД - 30”-60”. Поэтому для определения орбиты КА лучше использовать высокоточные ЗД и СД нового поколения, погрешности которых составляют: для ЗД - 0,1”-0,2” (ЗД HAST (High Accuracy Star Tracker), разработанный фирмой Bell Aerospace, имеющий полную погрешность 0,2” [4]: ЗД ВЗДО, разработанный в ГАИШ МГУ со случайной погрешностью меньше 0,1” [5]), для СД - 1” [6, 7].
Для реализации указанного способа измерений достаточно по меньшей мере одного ЗД и по меньшей мере одного СД на борту КА. Но ЗД и СД может быть несколько. Несколько ЗД устраняют различие точности определения разных параметров ориентации, повышают общую точность ее определения и позволяют продолжать функционировании при засветке некоторых датчиков Солнцем. Использование нескольких СД позволяет расширить поле зрения датчиков, а при одновременном попадании Солнца в поля зрения нескольких датчиков - повысить точность измерений.
Если КА обращается не вокруг Солнца, а вокруг другого тяготеющего тела (10), например, Земли, Луны, Марса, Юпитера и т.д., то датчик направления на Солнце должен быть заменен на датчик направления на центр этого объекта, соответственно, на датчик Земли, Луны, Марса, Юпитера и т.д. Совместное одновременное измерение, проведенное ЗД и ДНО, позволяет воспроизвести результаты позиционного измерения видимого положения КА, проведенного «фиктивным наблюдателем» находящимся в центре тяготеющего объекта, вокруг которого обращается КА.
Функционирование ДНО (13) может быть основано на различных принципах. Например, направление на центр Земли (геовертикаль) может определяться по тепловому излучению планеты в среднем инфракрасном диапазоне, по наблюдению освещенной части края Земли и терминатора в видимом диапазоне, по излучению, рассеянному атмосферой в ультрафиолетовом диапазоне. Для определения направления на центр Луны на ее освещенной стороне используется отождествление видимых деталей рельефа (кратеров) в видимом и ближнем инфракрасном диапазонах.
У систем ориентации содержащих несколько независимых датчиков ориентации (одного или различных типов) была обнаружена проблема, связанная с высокой точностью этих приборов. Наличие этой проблемы было подтверждено в ряде лабораторных и натурных экспериментов [8, 9]. Эксперименты имели следующий вид: рядом друг с другом устанавливались два или несколько звездных датчиков, оптические системы которых были направлены примерно одинаково. С этих датчиков одновременно снимались показания. Результаты экспериментов показали, что погрешность измерений каждого из датчиков в ходе всего эксперимента оставалась соответствующей их техническим характеристикам (т.е. 1”-3”), но их взаимная ориентация изменялась на несколько угловых секунд, а в некоторых экспериментах на 10”-20”. Наиболее вероятной причиной этих отклонений являются термоупругие деформации. Результаты экспериментов означают, что устройства определения ориентации, содержащие датчики с погрешностями меньше 3”-5”, выдают неверные показания с существенной систематической ошибкой из-за недостаточной механической жесткости конструкций, на которых установлены датчики.
Известен способ решения этой проблемы за счет повышения жесткости конструкций. Такое решение позволяет уменьшить величину описанной систематической ошибки, но приводит к существенному увеличению массы устройства определения ориентации, что для многих КА является неприемлемым. При использовании датчиков определения ориентации с субсекундными погрешностями решение указанной проблемы за счет увеличения жесткости механической конструкции оказывается совершенно неэффективным.
Поскольку в предлагаемом устройстве желательно использовать ЗД и ДНО максимально доступной точности, то оно также будет подвержено указанной проблеме.
Для ее решения было предложено ввести в конструкцию систем ориентации, состоящих из нескольких датчиков, в том числе и в устройство, реализующее предлагаемый способ определения орбиты КА, сенсоры для измерения изменений их мгновенного взаимного пространственного положения и учитывать эти сведения при обработке данных с ЗД и ДНО в блоке обработке данных. Эти решения закреплены в патентах РФ №2620149 [10] и 2620853 [11]. Сенсоры смещения могут быть встроены в механические основания. При этом механическое основание (44) становится активной частью устройства, ответственной за получение информации об изменении взаимного положения ЗД (12) и ДНО (13), входящих в состав устройства.
Вариант конструкции подобного механического основания (44) для устройства, в состав которого входят два ЗД (12) и один СД (13), показаны на фиг. 8-9. Это основание, которое имеет вид треугольной пирамиды, нижняя грань (40) которой предназначена для крепления к КА, а три боковые грани (41) - для установки на них двух ЗД (12) и одного СД (13). Боковые грани (41) пирамиды и основание (40) крепятся друг к другу через шаровые опоры (крепления) (42), расположенные вблизи вершин пирамиды, таким образом, что грани (41) и основание (40) не касаются друг друга (только через элементы крепления (42)), при этом крепления (42) позволяют боковым граням (41) осуществлять малые смещения и повороты относительно друг друга и относительно нижней ее грани (40). Сенсоры смещений (43), измеряющие смещения боковых граней, устанавливаются в зазорах между гранями (40, 41) пирамиды (которые идут вдоль ее ребер).
Осуществление заявляемого способа.
Способ автономного определения параметров орбиты КА осуществляется посредством использования устройства для автономного определения параметров орбиты (3) КА (11), которое включает по меньшей мере один звездный датчик ориентации (ЗД) (12), по меньшей мере один датчик направления (13) на центр объекта (10) (далее ДНО) в поле тяготения которого обращается КА (11), одно или несколько механических оснований для крепления указанных датчиков к КА (11) или непосредственно к целевой аппаратуре, часы и блок обработки данных (БОД) с упомянутых приборов, а также соединительные кабели (провода), которые связывают датчики, часы и БОД. Сигналы от часов, ЗД (12) и ДНО (13) поступают в блок обработки данных по проводам.
Дополнительно устройство для автономного определения параметров орбиты КА может быть оснащено системой геометрического контроля, которое установлено в основании (основаниях) (44) для крепления ЗД (12) и ДНО (13). Система геометрического контроля представляет собой по меньшей мере шесть сенсоров смещения (43), которые регистрируют изменения положения установленных на них приборов. Сенсоры смещения (43) также подключаются к БОД по соединительным (кабелям) проводам и встроены в механические основания (44) упомянутых датчиков.
Конструктивно устройство определения орбиты может представлять собой моноблок - единое устройство, или быть распределенным устройством, части которого устанавливаются в различных местах КА.
БОД выдает команды на проведение одновременных измерений на ЗД (12) и ДНО (13), считывает с них показания, а в устройстве с системой геометрического контроля, еще и показания сенсоров смещений (43), вычисляет видимое положение тяготеющего объекта (10) в момент проведения каждого измерения, запоминает серию последовательных видимых положении тяготеющего объекта (10), а затем вычисляет элементы орбиты (3) КА(11).
ЗД (12) и ДНО (13) устанавливаются за бортом КА(11) (на его внешней поверхности) таким образом, чтобы была известна их ориентация относительно КА (11) и друг относительно друга (ориентация датчиков определяется конструкцией КА и механических оснований). ЗД (12) и ДНО (13) могут устанавливаться в разных местах (внешней поверхности) КА (11), в этом случае они соединяются с БОД специальными кабелями или посредством штатной кабельной сети КА. Возможна также установка всех ЗД и ДНО в одном месте (на поверхности) КА, в этом случае устройство будет представлять собой моноблок (возможно, исключая БОД) и монтироваться на КА как единый прибор. В этом случае механическое основание (44) устройства определяет и обеспечивает взаимную ориентацию входящих в его состав ЗД (12) и ДНО (13).
Результатами функционирования данного устройства для автономного определения параметров орбиты КА являются
1) определение значений Кеплеровских элементов орбиты или эквивалентного набора параметров по трем измерениям, проведенным устройством;
2) определение, погрешностей элементов орбиты при более чем трех измерениях;
3) определение возмущений (изменения значений со временем) элементов орбиты по длинному ряду изменений, проведенному устройством.
В способе определения параметров орбиты КА с помощью устройства используется следующая информация, считающаяся известной:
а) КА обращается в поле тяготения небесного того тела (тяготеющего центра) (10), направление на центр которого определяют ДНО (13);
б) Ориентация осей конструкционных систем координат всех ЗД (22) и ДНО (23) в пространстве относительно систем координат, связанных с устройством (24), считается известной. Она определяется конструкцией механических оснований устройства (44) с помощью которых оно крепятся к КА (11) или целевой аппаратуре. Считается, что ориентация каждого датчиков (и ЗД, и ДНО) представлена в виде матриц трехмерного поворота Qi, где i - номер датчика.
При наличии в устройстве системы геометрического контроля - матрицы Qi задают исходные положения датчиков (и ЗД, и ДНО), которые они занимают в отсутствие внешних воздействий и термоупругих деформаций.
Матрицы перехода (31) между системами координат ЗД (22) и СД (23) и системой координат устройства (24) считаются известными.
Способ автономного определения параметров орбиты КА с помощью устройства включает следующие этапы.
1) Исходные положения каждого из датчиков (12, 13) относительно единой системы координат (24) описываются известными матрицами трехмерных поворотов Qi. Эта единая система координат может быть связана с устройством, реализующем способ автономного определения орбиты, или с космическим аппаратом, на котором установлено устройство, или с целевой аппаратурой, если устройство установлено непосредственно на ней. Далее мы будем говорить о системе координат устройства (24), подразумевая все перечисленные варианты. Повороты, соответствующие матрицам Qi, совмещают систему координат i-го датчика (22, 23) с системой координат устройства (24).
Матрицы поворотов Qi считаются известными из конструкции устройства (а при необходимости дополнительно из конструкций КА и целевой аппаратуры).
2) Одновременно, в заданный момент времени t получают измерения с помощью всех ЗД Zi и всех ДНО Oi (12, 13), здесь i - номер датчика.
Если в состав устройства входит система геометрического контроля, то в этот же момент времени считывают показания всех (по меньшей мере шести) сенсоров смещений (43), встроенных в механические основания устройства (44).
Все полученные данные измерений передаются в БОД.
3) Если в состав устройства входит система геометрического контроля, то на основе показаний сенсоров смещений (43) вычисляют матрицы малых трехмерных поворотов δQi, описывающих малые отклонения под действием внешних сил и термоупругих деформаций конструкций КА каждого из датчиков (12, 13) от исходных положений. Эти матрицы малых трехмерных поворотов δQi, являются поправками к матрицам трехмерных поворотов Qi на произвольные углы, которые определяют исходные положения датчиков (12, 13) относительно устройства в отсутствии внешних воздействий.
Для определения элементов матрицы малого поворота δQi необходимо решить систему линейных уравнений с числом уравнений и числом неизвестных равным числу сенсоров смещения (43), коэффициенты которой зависят от геометрии механического основания (44), а в правой части системы уравнений стоят показания сенсоров смещения (43). Такая система уравнений, например, описана в программе для ЭВМ [12].
4) Вычисляют матрицы поворота  , описывающие мгновенную ориентацию i-го датчика (12, 13) относительно системы координат устройства (24).
, описывающие мгновенную ориентацию i-го датчика (12, 13) относительно системы координат устройства (24).
При этом при отсутствии в устройстве системы геометрического контроля эта матрица совпадает с априорно известной матрицей поворота Qi
а при наличии в устройстве системы геометрического контроля она равна произведению известной матрицы поворота Qi и матрицы малого поворота δQi
5) Показания i-го ЗД Zi представляют собой ориентацию конструкционных осей (22) этого ЗД относительно инерциальной системы координат (21), связанной со звездами. Ориентация Zi представляется в виде кватерниона поворота, трех углов Эйлера, матрицы трехмерного поворота или в другом эквивалентном представлении.
Для каждого ЗД (12) по его показаниям Zi вычисляется матрица ориентации устройства Ui относительно инерциальной системы координат (21) по формуле
6) Производят вычисление среднего значения <U> ориентации системы координат устройства (24) относительно инерциальной системы координат (21) по всем ЗД (12) (если в устройстве только один ЗД, то <U>=Z×QZ*).
Отметим, что ориентация, определяемая с помощью ЗД (12), имеет разные погрешности по разным осям координат. Так положение центра поля зрения (два угла) определяется с погрешностью в несколько раз меньшей, чем угол разворота кадра вокруг оси визирования. Поэтому процедура усреднения показаний, полученных с нескольких ЗД, имеет достаточно сложный вид. Алгоритм процедуры усреднения показаний нескольких ЗД приведен в [13].
7) Показания i-го ДНО Oi (35) представляют собой направление на центр регистрируемого объекта (Солнце, Земля, Луна и т.д.) в системе конструкционных осей этого ДНО (23). Направление Oi представляется в виде единичного вектора направления или в другом эквивалентном представлении. Показания i-го ДНО выдаются только если регистрируемый объект находится в воле зрения этого датчика.
Для каждого ДНО (13) вычисляют направление  (36) на центр регистрируемого объекта относительно системы координат устройства (24) по формуле:
(36) на центр регистрируемого объекта относительно системы координат устройства (24) по формуле:
8) Производят вычисление среднего <O*> направления на объект (36) в системе координат устройства (24) по формуле
где k - число ДНО в поля зрения которых попадает тяготеющий объект.
Если объект присутствует в поле зрения только одного ДНО, то <O*>=О*.
Если объект не присутствует в поле зрения ни одного ДНО, то измерение считается неудачным, процедура прерывается и повторяется через некоторое время.
9) Вычисляют направление на тяготеющий объект в инерциальной системе координат (21) в виде единичного вектора I (37) по формуле:
I=<O*>×<U>.
10) вычисляется единичный вектор Р противоположный вектору I:
Р=-I.
Вектор Р в момент времени t задает видимое из центра тяготеющего объект положение КА, на борту которого проводились указанные ваше измерения.
11) Вектор Pk и момент проведения измерений tk запоминают, при этом k - это номер измерения/наблюдения.
Для запоминания этих данных выделяется некоторый (небольшой) объем электронной памяти в блоке обработки данных.
12) Этапы (2)-(11) повторяют до получения по меньшей мере трех последовательных измерений (Pk, tk), k=1..N, (N≥3).
Т.е. производят повторение указанных выше этапов до получения по меньшей мере трех последовательных значений Р.
13) К полученной серии наблюдений применяют один из алгоритмов получения элементов орбиты по серии позиционных наблюдений (например, метод Лагранжа-Гаусса, метод Лапласа, метод Ольберса или их модификации).
При N=3 можно определить параметры невозмущенной орбиты (например, ее Кеплеровские элементы), при N>3 можно определить как параметры невозмущенной орбиты, так и их погрешности. Если N>>3, то можно определить как параметры траектории орбиты, так и их возмущения - изменения параметров со временем.
Данное изобретение позволяет определить параметры орбиты космического аппарата вокруг Солнца автономным образом с высокой точностью, и дает возможность определения орбиты вокруг других тел солнечной системы (Земли, Луны, планет).
Точность определения параметров траектории КА тем выше, чем меньше погрешность используемых датчиков ориентации (ЗД и ДНО), поэтому следует использовать максимально точные датчики ориентации.
Примеры реализации.
Пример 1. Способ и устройство для определения параметров орбиты КА вокруг Солнца без системы геометрического контроля.
Устройство определения параметров орбиты КА включает в себя два звездных датчика ориентации (ЗД) и один датчик направления на Солнце (СД), установленные на механическом основании, соединительные кабели и блок обработки данных (БОД), включающий внутренние бортовые часы - фиг. 8.
Механическое основание (44) представляет собой правильную треугольную пирамиду, основание (40) которой является правильным треугольником, а боковые грани (41) - одинаковыми равнобедренными прямоугольными треугольниками с углами 90° при вершине пирамиды (таким образом, боковые грани этой пирамиды взаимно перпендикулярны). Грани пирамиды жестко соединены между собой.
Нижняя грань (40) основания имеет отверстия для крепления к КА, на две боковые грани (41) устанавливаются высокоточные ЗД (12), а на третью боковую грань (41) - широкоугольный СД (13). Оба ЗД (12) и СД (13) кабелями соединяются с БОД. Показаниями ЗД (12) является кватернион ориентации qi (где i=1 или 2 - номер ЗД), характеризующий разворот конструкционной системы ЗД (22) относительно инерциальной системы координат (21), а показаниями СД (13) является единичный вектор S, направленный на центр Солнца в системе координат СД (23).
Система координат устройства (24) связана с механическим основанием (44). Начало координат О находится в центре нижней грани основания. Ось OZ перпендикулярна нижней грани основания, она проходит через точку О и вершину пирамиды. Ось ОХ лежит в плоскости нижней грани основания, она проходит через точку О и середину гипотенузы боковой грани на которой установлен СД. Ось OY перпендикулярна осям ОХ и OZ, а ее направление выбрано так, что оси OX, OY и OZ образуют правую тройку (см. фиг. 10).
С датчиками также связаны системы координат. Начала этих систем координат Oi (i=1..3, i=1 соответствует первому ЗД, i=2 - второму, i=3 - СД) расположены в центрах (точках пересечения медиан) соответствующих боковых граней механического основания (44). Оси OiXi направлены по внешней нормали к граням основания и совпадают с осями визирования оптических систем датчиков. OiYi лежат в плоскости боковых граней, они проходят через точки Oi и центр гипотенузы соответствующей грани. Оси OiZi перпендикулярны осям OiXi и OiYi, а их направления выбраны так, чтобы оси OiXi, OiYi и OiZi образовывали правую тройку векторов.
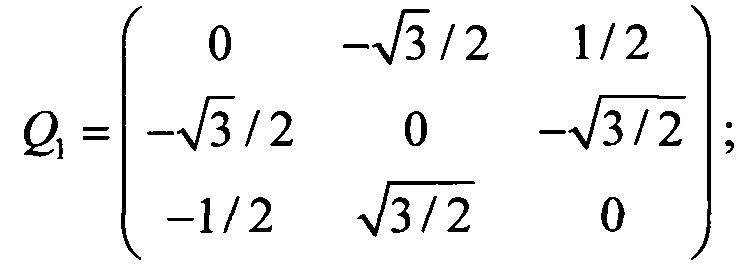
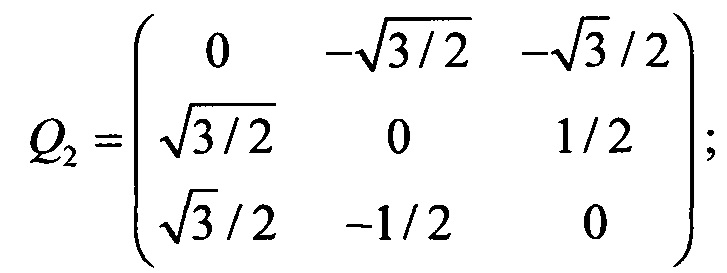
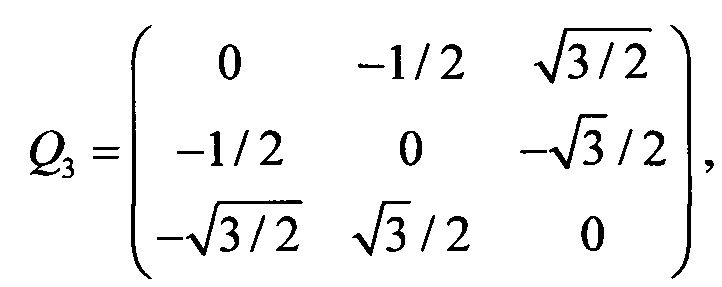
При такой геометрии механического основания (44) и указанном выборе систем координат матрицы перехода Qi от системы координат i-го датчика к системе координат механического основания будут иметь вид:
Задаются три момента измерений t1, t2, t3, причем интервал между этими моментами времени превышает длительности экспозиций, используемых в ЗД и СД. В эти моменты одновременно проводятся измерения обоими ЗД и СД, результаты проведенных измерений имеют вид (t1, q1,1, q2,1, S1), (t2, q1,2, q2,2, S2) и (t3, q1,3, q2,3, S3), здесь q1,i - результаты измерений 1-м ЗД в i-м измерении, a q2,i - результаты измерений 2-м ЗД в i-м измерении.
Кватернионы q и вектора S переводятся в систему координат устройства (механического основания) с помощью соответствующих матриц Q:
q*1,i=q1,i×Q1,
q*2,i=q2,i×Q2,
S*i=Si×Q3,
где i - номер измерения. После этих преобразований серия измерений приобретает следующий вид
(t1, q*1,1, q*2,1, S*1), (t2, q*1,2, q*2,2, S*2), (t3, q*1,3, q*2,3, S*3).
Показания 1-го и 2-го ЗД в каждом наблюдении усредняются
(t1, <q*1>, U*1), (t2, <q*2>, U*2), (t3, <q*3>, U*3),
здесь <q*i> - среднее значение показаний двух ЗД в системе координат устройства (механического основания) в i-м наблюдении.
Затем величина <q*i> пересчитывается в матрицу <W*i> перехода между системой координат устройства и инерциальной системой координат. Эта матрица используется для перевода вектора направления на Солнце из представления в системе координат устройства S*i в инерциальную систему координат Ii по формуле
Ii=S*i×<W*i>.
Единичные вектора Pi, противоположные векторам Ii:
Pi=-Ii=-S*i×<W*i>
представляют собой позиционные измерения видимого положения КА на котором установлено устройство, полученные в моменты времени ti фиктивным наблюдателем, находящимся в центре Солнца. Окончательно серия наблюдений приобретает вид
(t1, P1), (t2, P2), (t3, P3).
К этой серии наблюдений применяется метод Гаусса, результатом применения которого являются значения шести Кеплеровских элементов орбиты КА:
(а, е, i, Ω, ω, М0),
здесь а - большая полуось, е - эксцентриситет, i - наклонение плоскости орбиты, Ω - долгота восходящего узла орбиты, ω - аргумент перицентра и M0 - средняя аномалия.
Пример 2. Способ и устройство для определения параметров траектории орбиты КА вокруг Земли с использованием системы геометрического контроля.
Устройство определения параметров траектории орбиты КА включает в себя три звездных датчика ориентации (12) установленные на механическом основании (44) с восемнадцатью встроенными сенсорами смещений (43), и один датчик направления на центр Земли - датчик геовертикали (ГВ), установленный на отдельном механическом основании с шестью встроенными сенсорами смещений, соединительные кабели и блок обработки данных (БОД), включающий внутренние часы.
Механическое основание (44) для трех ЗД представляет собой правильную треугольную пирамиду, основание которой (40) является правильным треугольником, а боковые грани (41) - одинаковыми равнобедренными прямоугольными треугольниками с углами 90° при вершине пирамиды (таким образом, боковые грани этой пирамиды взаимно перпендикулярны) - фиг. 8.
Нижняя грань основания ЗД (40) крепится непосредственно к КА, три боковые грани (41) крепятся таким образом, чтобы боковые и нижняя грани пирамиды не касались друг друга, при этом вдоль ребер пирамиды остается зазор, в который устанавливаются одномерные сенсоры смещения (43). На каждое ребро пирамиды механического основания ЗД устанавливается три сенсора смещений (43), на всю пирамиду, соответственно, 18 сенсоров смещений. При этом оси сенсоров (направления, в которых ведутся измерения смещений) не должны быть параллельны. На боковые грани пирамиды устанавливаются три высокоточных ЗД (12). Все ЗД (12) и сенсоры смещений (43) кабелями соединяются с БОД.
Механическое основание для ГВ (44) состоит из двух пластин. Нижняя пластина основания ГВ крепится непосредственно к КА, верхняя пластина крепится к КА таким образом, чтобы она в начальном положении была параллельна нижней пластине, но не касалась ее. Между пластинами остается зазор, в который устанавливаются шесть сенсоров смещений. При этом оси сенсоров (направления, в которых ведутся измерения смещений) не должны быть параллельны. На внешнюю сторону верхней пластины механического основания устанавливается ГВ. ГВ и все сенсоры смещений (43) кабелями соединяются с БОД.
Механические основания крепятся к КА таким образом, что нижняя грань пирамиды основания ЗД и нижняя пластина основания ГВ параллельны.
Показаниями ЗД является кватернион ориентации qi (где i=1, 2 или 3 - номер ЗД), характеризующий разворот конструкционной системы координат датчика относительно инерциальной системы координат, показаниями ГВ является единичный вектор U, направленный на центр Земли в системе координат ГВ, а показаниями сенсора смещений является изменение расстояния Δх между концами сенсора вдоль его оси.
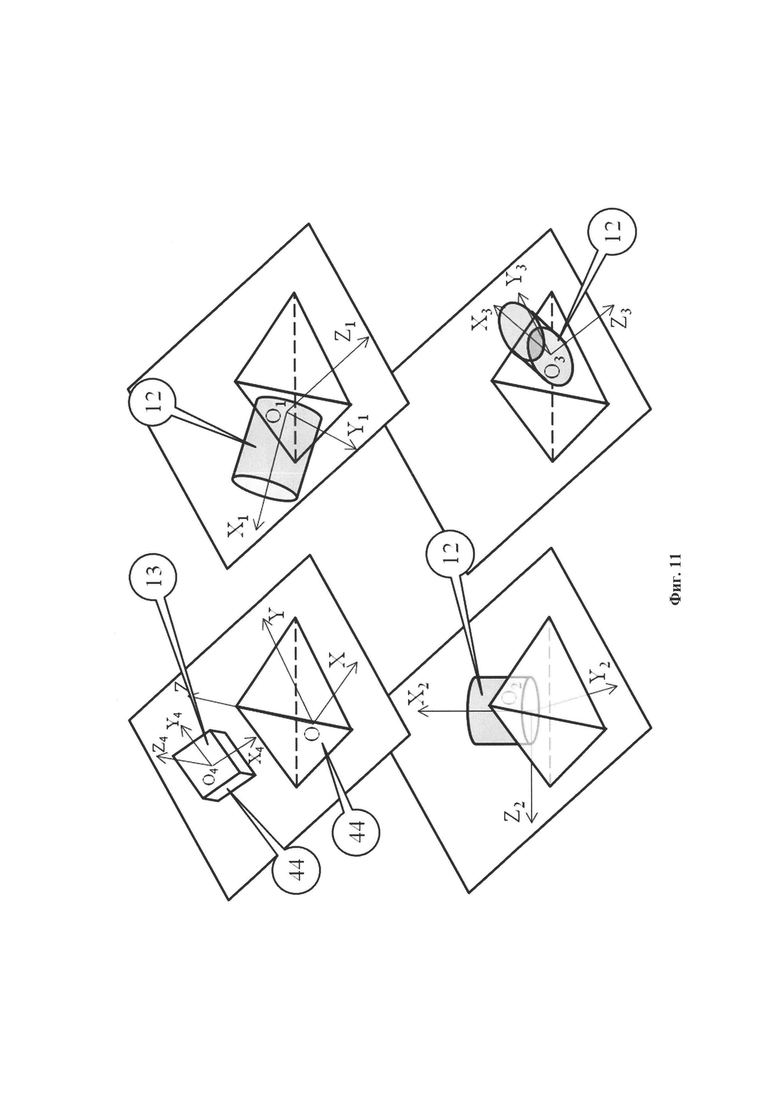
Система координат устройства связана с механическим основанием ЗД. Начало координат О находится в центре нижней грани основания. Ось OZ перпендикулярна нижней грани основания, она проходит через точку О и вершину пирамиды. Ось ОХ лежит в плоскости нижней грани основания, она проходит через точку О и середину гипотенузы боковой грани на которой установлен ЗД №3. Ось OY перпендикулярна осям ОХ и OZ, а ее направление выбрано так, что оси OX, OY и OZ образуют правую тройку.
С ЗД также связаны системы координат. Начала этих систем координат Oi (i=1..3 - номера ЗД) расположены в центрах (точках пересечения медиан) соответствующих боковых граней механического основания. Оси OiXi направлены по внешней нормали к граням основания и совпадают с осями визирования оптических систем датчиков. OiYi лежат в плоскости боковых граней, они проходят через точки Oi и центр гипотенузы соответствующей грани. Оси OiZi перпендикулярны осям OiXi и OiYi, а их направления выбраны так, чтобы оси OiXi, OiYi и OiZi образовывали правую тройку.
С ГВ и механическим основанием ГВ связана своя система координат. Начало системы координат ГВ О4 расположено в центре нижней стороны нижней пластины основания. Оси этой системы координат О4Х4, O4Y4 и O4Z4 параллельны одноименным осям системы координат механического основания ЗД (устройства).
При такой геометрии механических оснований и указанном выборе систем координат матрицы перехода Qi от системы координат i-го датчика к системе координат механического основания будут иметь вид:
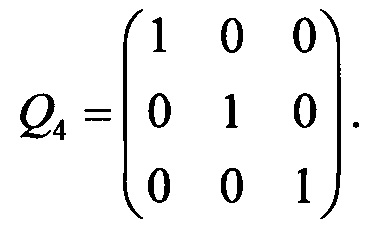
(i=1..3 - ЗД с соответствующими номерами, i=4 - ГВ и его механическое основание).
Задается серия моментов измерений t1, t2, … tN, причем N≥3, а интервал между этими моментами времени превышает длительности экспозиций, используемых в ЗД и ГВ. В каждый из этих моментов одновременно проводятся измерения тремя ЗД и ГВ, а также снимаются показания со всех сенсоров смещений [Δxk] (k=1..24). Результаты проведенных измерений имеют вид (t1, q1,1, q2,1, q3,1, U1, [Δxk]1), (t2, q1,2, q2,2, q3,2, U2, [Δxk]2) … (tN, q1,N, q2,N, q3,N, UN, [Δxk]N), здесь q1,i - результаты измерений 1-м ЗД в i-м измерении, q2,i - результаты измерений 2-м ЗД в i-м измерении, a q3,i - результаты измерений 3-м ЗД в 1-м измерении.
На основе показаний сенсоров смещений [Δxk]i в момент проведения i-го измерения ti вычисляются малые поправки δQ1 … δQ4 к матрицам Q1 … Q4. Поправки δQ1, δQ2 и δQ3 вычисляются одновременно, для этого решается система 18 линейных уравнений, неизвестными в которой являются малые смещения и малые повороты боковых граней механического основания ЗД относительно нижней грани (всего 18 неизвестных), а правыми частями системы уравнений - показания сенсоров смещения, установленных в механическом основании ЗД, Δxk, k=1..18. Для вычисления поправки δQ4 решается система 6 линейных уравнений, неизвестными в которой являются малые смещения и малые повороты верхней пластины механического основания ГВ относительно нижней пластины (6 неизвестных), а правыми частями системы уравнений - показания сенсоров смещения, установленных в механическом основании ГВ, Δxk, k=19..24.
Затем вычисляются полные мгновенные (для i-го момента измерений) матрицы переходов Q* по следующим формулам:
Q*1,i=Q1 × δQ1,i,
Q*2,i=Q2 × δQ2,i,
Q*3,i=Q3 × δQ3,i,
Q*4,i=Q4 × δQ4,i.
Кватернионы q переводятся в систему координат устройства (механического основания ЗД) с помощью соответствующих матриц Q*:
q*1,i=q1,i × Q*1,i,
q*2,i=q2,i × Q*2,i,
q*3,i=q3,i × Q*3,i,
где i - номер измерения, а вектора U переводятся в систему координат устройства (совпадающего с системой координат механического основания ЗД) с помощью матрицы
U*i=Ui×Q*4,i.
После этих преобразований серия измерений приобретает следующий вид
(t1, q*1,1, q*2,1, q*3,1, U*1), (t2, q*1,2, q*2,2, q*3,2, U*1)…(tN, q*1,N, q*2,N, q*3,N, U*N).
Показания ЗД в каждом наблюдении усредняются
(t1, <q*1>, U*1), (t2, <q*2>, U*1)…(tN, <q*N>, U*N),
здесь <q*i> - среднее значение показаний трех ЗД в системе координат устройства (механического основания) в i-м наблюдении.
Затем величина <q*i> пересчитывается в матрицу <W*i> перехода между системой координат устройства и инерциальной системой координат. Эта матрица используется для перевода вектора направления на центр Земли из представления в системе координат устройства U*i в инерциальную систему координат I*i по формуле
I*i=U*i×<W*i>.
Единичные вектора Pi, противоположные векторам I*i:
Pi=-I*i=-U*i×<W*i>
представляют собой позиционные измерения видимого положения КА на котором установлено устройство, полученные в моменты времени ti фиктивным наблюдателем, находящимся в центре Земли. Окончательно серия наблюдений приобретает вид
(t1, P1), (t2, P2)…(tN, PN).
К этой серии наблюдений применяется метод Лапласа, результатом применения которого при N=3 являются значения шести Кеплеровских элементов орбиты КА:
(а, е, i, Ω, ω, M0),
здесь а - большая полуось, e - эксцентриситем, i - наклонение плоскости орбиты, Ω - долгота восходящего узла орбиты, ω - аргумент перицентра и M0 - средняя аномалия.
При N>3 результатом применения метод Лапласа, результатом применения которого при N=3 являются значения шести Кеплеровских элементов орбиты КА и их погрешности:
(а±Δа, е±Δе, i±Δi, Ω±ΔQ, ω±Δω, ΔM0±ΔM0).
Пример 3. Испытания и проверки с использованием компьютерного моделирования.
Перед тем как изготовить действующую систему проводятся испытания и проверка работы устройства для определения параметров траектории КА с использованием компьютерного моделирования. Средства компьютерного моделирования могут также использоваться как часть процесса планирования реального движения КА в пространстве.
Для компьютерного моделирования потребуется разработать виртуальную модель устройства автономного определения параметров траектории орбиты КА, а также входящих в него звездных датчиков, датчика направления на Солнце, механических оснований и сенсоров смещений. Дополнительно нужна минимальная модель КА, на котором установлено устройство, а также модель внешних условий (включая силовые и тепловые воздействия), позволяющая задать или определить деформации устройства.
Компьютерное моделирование используется для испытаний и проверки работоспособности устройства автономного определения параметров траектории орбиты КА и его отдельных подсистем, а также эффективности способа его использования.
Библиография.
1. Дубяго А.Д. Определение орбит // М. - Л.: ”Гостехиздат”, 1949. 444 с.
2. Эскобал П. Методы определения орбит / пер. с английского // М.: ”Мир”, 1970. 470 с.
3. Дубошин Г.Н. Небесная механика. Основные задачи и методы / Учебник для студентов университетов, обучающихся по специальности ”Астрономия”. Изд. 3-е, доп. // М.: Наука, 1975. 800 с.
4. Michaels D.L., Speed J.F. Proceedings of SPIE, 2004. V. 5430. P. 43-52.
5. Стекольщиков О.Ю., Захаров А.И., Прохоров M.E. Механика, управление и информатика, 2013. №13. С. 69-79.
6. Захаров А.И., Прохоров М.Е., Жуков А.О. Способ измерения угловых координат Солнца и реализующее его устройство // Патент RU 2555216, опубликован 10 июля 2015 г.
7. Прохоров М.Е., Захаров А.И., Жуков А.О., Миронов А.В., Стекольщиков О.Ю. Механика, управление и информатика, 2015. Т. 7, №2(55). С. 142-147.
8. А.В. Никитин, Б.С. Дунаев, В.А. Красиков, Механика, управление и информатика №2. С. 62-69 (2011).
9. А.Ю. Карелин, Ю.Н. Зыбин, В.О. Князев, А.А. Поздняков, Механика, управление и информатика №19, С. 120-128 (2015).
10. Захаров А.И., Прохоров М.Е., Стекольщиков О.Ю., Тучин М.С., Крусанова Н.Л., Абубекеров М.К. Способ и устройство для определения ориентации космических или летательных аппаратов // Патент RU 2620149, опубликован 23 мая 2017 г.
11. Захаров А.И., Прохоров М.Е., Стекольщиков О.Ю., Тучин М.С., Крусанова Н.Л., Абубекеров М.К. Способ и устройство (варианты) для определения ориентации космических или летательных аппаратов // Патент RU 2620853, опубликован 30 мая 2017 г.
12. Прохоров М.Е., Захаров А.И., Стекольщиков О.Ю., Тучин М.С. Программа обработки показаний подсистемы геометрического контроля // Программа для ЭВМ, свидетельство RU 2017614937, опубликовано 02.05.2017.
13. Beaupellet J.L., de Sanctis S., Sechi G., Girouart B. Attitude determination tailored to multiple heads star-tracker // ESA. TRP: T603-11ES. 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620448C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2620288C1 |
| Способ определения координат звезд звездным датчиком, установленным на космическом аппарате, при каталогизации звездного неба | 1988 |
|
SU1656323A1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО МЕСТНОЙ ВЕРТИКАЛИ ПЛАНЕТЫ | 1991 |
|
RU2021174C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
Изобретение относится к области наблюдения и слежения за полётом космических аппаратов (КА) при их движении вокруг тяготеющего небесного тела (Земли, Луны, Солнца и т.д.). На борту КА устанавливают не менее двух звездных датчиков (ЗД) и столько же датчиков направления на тяготеющее тело, например на Солнце (СД). Несколько ЗД снижают опасность засветки, а несколько СД позволяют расширить их фактическое поле зрения (при одновременном попадании в них Солнца). Предложенный алгоритм обработки измерений ЗД и СД, приводящий их к единой системе координат, связанной с основанием для установки ЗД и СД, обеспечивает повышение точности определения орбиты КА. Этому способствует и система геометрического контроля в виде множества сенсоров смещения датчиков относительно их основания. Техническим результатом является высокоточное автономное определение параметров орбиты КА вокруг того или иного небесного тела. 3 з.п. ф-лы, 11 ил.
1. Способ автономного определения параметров орбиты космического аппарата, характеризующийся тем, что на этапе:
1) проводят измерения показаний Zi посредством по меньшей мере двух звездных датчиков (ЗД) и показаний Oi посредством по меньшей мере двух датчиков направления на тяготеющий объект (ДНО) одновременно в момент времени t, определяемый по бортовым часам, синхронизированным с бортовым временем космического аппарата, после чего передают эти измерения в блок обработки данных;
2) вычисляют ориентацию конструкционных осей Ui i-го ЗД относительно единой системы координат, связанной с механическим основанием для установки указанных ЗД и ДНО устройством, космическим аппаратом или целевой аппаратурой, по формуле:
Ui =Zi×Qi*,
где Qi* - матрица трехмерного поворота, описывающая мгновенную ориентацию i-го ЗД относительно указанной единой системы координат;
3) производят вычисление среднего значения <U> ориентации конструкционных осей указанной единой системы координат относительно инерциальной системы координат по показаниям всех ЗД;
4) вычисляют направления Oi* на центр тяготеющего объекта относительно указанной единой системы координат по формуле:
Oi*=Oi×Qi*,
где Qi* - матрица трехмерного поворота, описывающая мгновенную ориентацию i-го ДНО относительно указанной единой системы координат;
5) производят вычисление среднего по всем датчикам значения <O*> направления на объект в указанной единой системе координат;
6) определяют среднее направление на тяготеющий объект в инерциальной системе координат в виде единичного вектора I* по формуле:
I*=<O*>×<U>,
7) после чего определяют единичный вектор Р, противоположный по направлению вектору I*:
Р=-I*,
8) запоминают в блоке обработки данных единичный вектор Pk и момент проведения измерений tk, при этом k - это номер измерения;
9) повторяют этапы 1) - 8) до получения по меньшей мере трех последовательных значений Р;
10) к полученным значениям Р применяют алгоритм получения параметров орбиты по серии позиционных наблюдений.
2. Способ по п. 1, отличающийся тем, что дополнительно в момент времени t проводят измерения показаний по меньшей мере шести сенсоров смещения, встроенных в механические основания датчиков, и на основе этих показаний вычисляют матрицы малых 3-мерных поворотов δQi, описывающих малые отклонения под действием внешних сил и термоупругих деформаций конструкций КА каждого из датчиков от исходных положений, а матрицу трехмерного поворота Qi* рассчитывают по формуле:
Qi*=Qi×δQi,
где Qi - известная невозмущенная матрица поворота,
3. Способ по п. 1, отличающийся тем, что этап 4) выполняют с использованием матрицы трехмерного поворота Qi*, совпадающей с априорно известной матрицей поворота Qi:
Qi*=Qi.
4. Способ по п. 1, отличающийся тем, что алгоритм получения параметров орбиты по серии позиционных наблюдений осуществляют методом Лагранжа-Гаусса, или методом Лапласа, или методом Ольберса, или их модификациями.
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| US 5109346 A, 28.04.1992 | |||
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| US 9296495 B2, 29.03.2016 | |||
| US 6622970 В2, 23.09.2003 | |||
| DE 3417661 A1, 15.11.1984. | |||

