Изобретение относится к области космической техники и может быть использовано на космических аппаратах (КА), ориентированных в солнечно-земной системе координат, для ориентации солнечных батарей на Солнце без датчика угла поворота вала привода солнечных батарей (СБ).
Известен способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю (ПОЗ) с использованием исполнительных органов, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси КА с плоскостью Солнце -космический аппарат - Земля по информации с прибора ориентации на Солнце (ПОС), установленного на корпусе КА, с использованием исполнительных органов и разворот панелей СБ вокруг оси, параллельной третьей оси КА, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода СБ по информации с ПОС [Космические вехи: сборник научных трудов, посвященный 50-летию создания АО «ИСС» имени академика М.Ф. Решетнева. - Красноярск: ИП Суховольская Ю.П., 2009. с. 129-130].
Для обеспечения функционирования космического аппарата в режиме работы по целевому назначению необходимо ориентировать нормаль к рабочей поверхности СБ на Солнце. Это можно осуществлять, например, путем разворота панелей СБ вокруг оси, параллельной третьей оси КА со скоростью, пропорциональной углу между направлением на Солнце и нормалью к рабочей поверхности СБ.
Угол между направлением на Солнце и нормалью к рабочей поверхности СБ вычисляется по разности углов, полученных с ПОС и датчика угла поворота вала привода СБ.
По информации с прибора ориентации на Солнце, установленного на корпусе КА, в плоскости, перпендикулярной третьей оси, определяется угол между второй осью космического аппарата и направлением на Солнце (α). По информации с датчика угла поворота вала привода СБ, входящего в состав привода солнечных батарей, определяется угол между второй осью КА и нормалью к рабочей поверхности СБ (γ).
На каждом цикле управления на привод СБ выдается управляющее воздействие на формирование угловой скорости (γ') поворота вала привода солнечных батарей.
Управляющее воздействие на формирование угловой скорости поворота вала привода солнечных батарей может определяться, например, по следующему закону:

где:
К - коэффициент закона управления;
α - угол между второй осью КА и направлением на Солнце;
γ - угол между второй осью КА и нормалью к рабочей поверхности СБ (угол поворота вала привода солнечных батарей);
γ' - управляющее воздействие на формирование угловой скорости поворота вала привода солнечных батарей.
Следует отметить, что при точном (идеальном) отслеживании угла α приводом солнечных батарей (γ≡α) скорость привода СБ, отрабатывающая величину γ' равна проекции орбитальной скорости на третью ось КА, а проекция орбитальной скорости на третью ось КА - величина непостоянная и зависит от угла Солнце - космический аппарат - Земля, угла между плоскостью орбиты и направлением на Солнце и эксцентриситета орбиты. Поэтому, так как привод СБ компенсирует уход направления на Солнце вокруг третьей оси КА, угловая скорость поворота вала привода солнечных батарей должна реализовываться тоже непостоянной.
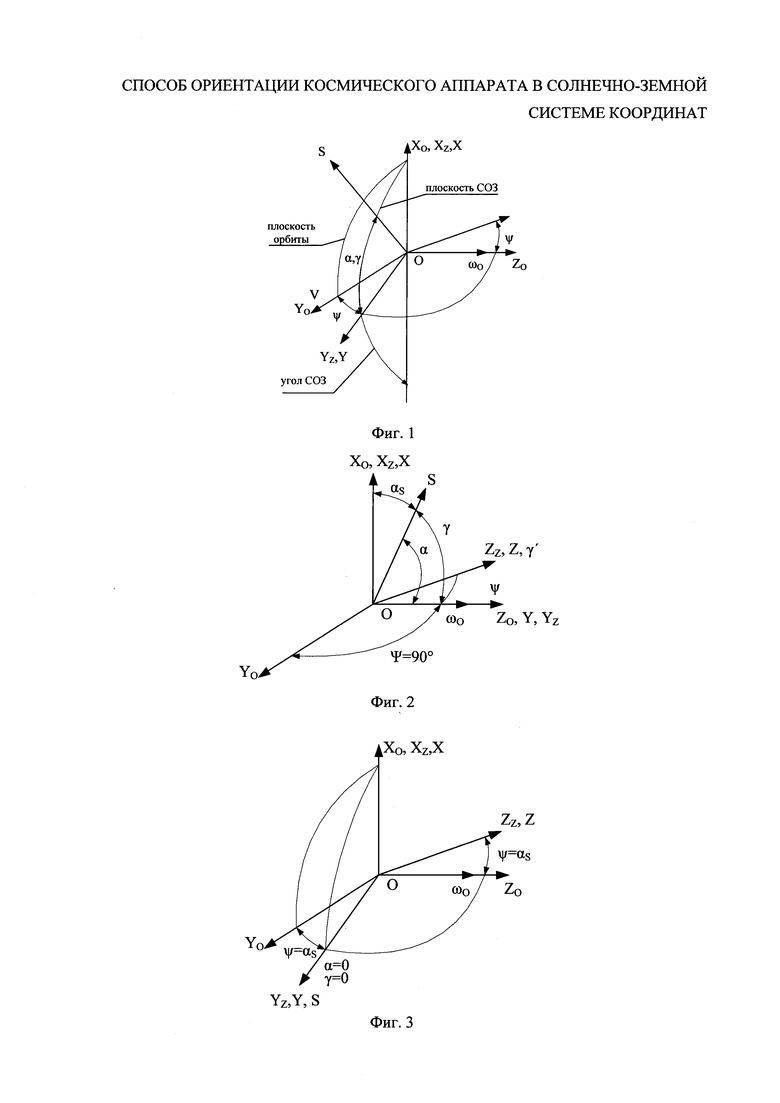
На фиг. 1 показано взаимное расположение орбитальной (OXOYOZO), солнечно-земной (OXZYZZZ) и связанной (OXYZ) систем координат, где:
О - начало системы координат (совпадает с центром масс КА);
ОХO - направлена по текущему радиус-вектору КА от Земли;
OZO - направлена по нормали к плоскости орбиты, совпадает по направлению с вектором угловой орбитальной скорости;
OYO - дополняет систему координат до правой;
OXZ - направлена по текущему радиус-вектору КА от Земли;
OYZ - лежит в плоскости Солнце - космический аппарат - Земля и направлена в сторону Солнца;
OZZ - дополняет систему координат до правой;
ОХ - первая ось КА;
OY - вторая ось КА;
OZ - третья ось КА;
Ψ - курсовой угол;
OS - направление на Солнце;
V - линейная скорость КА;
ωO - орбитальная скорость;
СОЗ - Солнце - космический аппарат - Земля.
На фиг .2 и фиг. 3 представлены случаи крайнего положения Солнца относительно плоскости орбиты, где:
αS - угол между плоскостью орбиты и направлением на Солнце;
γ - угол поворота вала привода солнечных батарей;
γ' - угловая скорость поворота вала привода солнечных батарей.
На фиг. 2 плоскость СОЗ перпендикулярна плоскости орбиты, при этом:



При αS=90° γMAX=γMIN=0, γ'=0.
На фиг. 3 угол между плоскостью СОЗ и плоскостью орбиты равен αS, при этом:




При αS=0 γMAX=90°, γMIN=-90°.
На фиг. 2, 3 углы γ=α, что может быть при идеальном отслеживании нормалью к поверхности СБ направление на Солнце.
Основным недостатком способа ориентации космического аппарата в солнечно-земной системе координат, описанного выше, является то, что при отсутствии датчика угла поворота вала привода СБ либо при его неисправности, невозможно определить угол рассогласования между направлением на Солнце и нормалью к рабочей поверхности солнечных батарей космического аппарата. Это приводит к потере ориентации нормали к рабочей поверхности СБ на Солнце.
Выход из сложившейся ситуации может быть следующим.
При отсутствии датчика угла поворота вала привода СБ или при его неисправности ориентация панелей СБ на Солнце реализуема в том случае, если есть возможность зафиксировать хотя бы в одной точке (реперной) на витке угол поворота вала привода СБ между второй осью КА и нормалью к рабочей поверхности СБ. Затем, на каждом цикле управления по разности углов между направлением на Солнце и расчетным углом положения нормали к рабочей поверхности СБ определяется управляющее воздействие на формирование расчетной угловой скорости γ'P (далее по тексту расчетная угловая скорость) поворота вала привода СБ, например, по следующему закону:

где:
К - коэффициент закона управления;
α - угол между второй осью КА и направлением на Солнце;
γP - расчетный угол между второй осью КА и нормалью к рабочей поверхности СБ (расчетный угол поворота вала привода солнечных батарей);
γ'P - расчетная угловая скорость поворота вала привода солнечных батарей.
Значение расчетного угла γP определяется путем интегрирования расчетной угловой скорости поворота вала привода СБ (γ'P), считая, что привод отрабатывает угловую скорость равную K⋅(α-γP). При этом начальное значение γP(0) должно соответствовать положению привода СБ в реперной точке.
Наиболее близким к заявляемому решению по технической сущности и достигаемому техническому результату является способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с ПОЗ с использованием исполнительных органов, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси КА с плоскостью Солнце - космический аппарат - Земля по информации с ПОС, установленного на корпусе КА, с использованием исполнительных органов и разворот панелей СБ вокруг оси, параллельной третьей оси КА, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода СБ по информации с ПОС [Космические вехи: сборник научных трудов, посвященный 50-летию создания АО «ИСС» имени академика М.Ф. Решетнева. - Красноярск: ИП Суховольская Ю.П., 2009. с. 129-130].
Описанный способ принят за прототип изобретения.
Недостатком прототипа является то, что при отсутствии датчика угла поворота вала привода СБ или его неисправности невозможно определить угол между второй осью КА и нормалью к рабочей поверхности СБ. Это приводит к потере ориентации нормали к рабочей поверхности СБ на Солнце.
Обычно на приводах поворота солнечных батарей устанавливают концевые контакты, которые используют для установки панелей СБ в исходное положение в начальных режимах работы КА и в режиме обеспечения живучести. Эти концевые контакты можно использовать в качестве реперных точек для определения углового положения панелей солнечных батарей. При отсутствии таких контактов в приводе СБ устанавливают дополнительные реперные контакты, при замыкании которых нормаль к поверхности СБ параллельна второй оси КА.
В основу настоящего изобретения положена задача создания способа ориентации космического аппарата, ориентируемого в солнечно-земной системе координат, позволяющего обеспечить ориентацию панелей СБ на Солнце, без датчика угла поворота вала привода солнечных батарей.
Поставленная задача решается следующим образом.
Заявлен способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю с использованием исполнительных органов, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси КА с плоскостью Солнце - космический аппарат - Земля по информации с прибора ориентации на Солнце, установленного на корпусе космического аппарата, с использованием исполнительных органов и разворот панелей солнечных батарей вокруг оси, параллельной третьей оси космического аппарата, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода солнечных батарей по информации с прибора ориентации на Солнце, отличающийся тем, что при отсутствии датчика угла поворота вала привода солнечных батарей или его неисправности на каждом цикле управления проводятся определение расчетного угла между положением нормали к поверхности солнечных батарей и второй осью космического аппарата путем интегрирования расчетной угловой скорости поворота вала привода солнечных батарей, по которой сформировано управляющее воздействие на привод солнечных батарей на предыдущем цикле управления, выдача управляющего воздействия по скорости на привод солнечных батарей по информации о расчетном угле между положением нормали к поверхности солнечных батарей и направлением на Солнце на текущем цикле управления, уточнение расчетного угла между положением нормали к поверхности солнечных батарей и второй осью космического аппарата при каждом прохождении реперного концевого контакта.
Сущность изобретения.
При отсутствии датчика угла поворота вала привода солнечных батарей или при его неисправности после прохождения реперного концевого контакта на каждом цикле управления определяют расчетный угол между положением нормали к поверхности СБ и второй осью космического аппарата путем интегрирования расчетной угловой скорости поворота вала привода СБ, сформированной на предыдущем цикле управления, например, по следующему закону:

где:
К - коэффициент закона управления;
α - угол между второй осью КА и направлением на Солнце;
 - расчетный угол между второй осью КА и нормалью к рабочей поверхности СБ (расчетный угол поворота вала привода солнечных батарей);
- расчетный угол между второй осью КА и нормалью к рабочей поверхности СБ (расчетный угол поворота вала привода солнечных батарей);
 - расчетная угловая скорость поворота вала привода солнечных батарей,
- расчетная угловая скорость поворота вала привода солнечных батарей,
и формируют управляющее воздействие по скорости на привод СБ, направленное на уменьшение угла между расчетным положением нормали к рабочей поверхности СБ и направлением на Солнце.
При прохождении реперной точки определяется фактический угол рассогласования между направлением на Солнце и нормалью к рабочей поверхности СБ, что позволяет уточнить величину расчетного угла между второй осью КА и нормалью к рабочей поверхности СБ.
В качестве реперной точки используется концевой контакт.
Величина угла замыкания или размыкания (далее по тексту замыкание) концевого контакта определяется в процессе изготовления привода СБ и закладывается в бортовую вычислительную машину КА.
Концевой контакт устанавливают в привод СБ таким образом, чтобы его замыкание происходило при минимальном угле между нормалью к рабочей поверхности СБ и второй осью космического аппарата. Это необходимо потому, что максимальный угол между второй осью КА и направлением на Солнце в течение года для космических аппаратов, ориентируемых в солнечно-земной системе координат, изменяется от 0 до ±90° (см. фиг. 2, 3), при этом на каждом витке при отслеживании направления на Солнце нормаль к рабочей поверхности СБ проходит параллельно второй оси КА.
Режимы начальной ориентации при неисправном датчике угла осуществляются следующим образом. Нормали к рабочей поверхности СБ устанавливаются параллельно второй оси КА, при этом концевой контакт замкнут. После этого осуществляется ориентация второй оси на Солнце по информации с ПОС. Затем осуществляется ориентация первой оси на Землю при углах Солнце - космический аппарат - Земля близких к 90° путем разворота КА вокруг второй оси до момента попадания Земли в поле зрения ПОЗ, при поддержании ориентации второй оси КА на Солнце. По окончанию ориентации первой оси на Землю КА переходит в режим работы по целевому назначению, при этом угол между нормалью к рабочей поверхности СБ и направлением на Солнце мал и отслеживание направления на Солнце панелями СБ осуществляется по логике, описанной выше.
Такой способ ориентации космического аппарата в солнечно-земной системе координат позволяет обеспечить ориентацию солнечных батарей на Солнце, при отсутствии или неисправности датчика угла поворота вала привода солнечных батарей.
Погрешность представленного способа ориентации зависит от погрешности установки концевых контактов и от погрешности формирования угловой скорости вращения приводом солнечных батарей.
Предложенный способ ориентации космического аппарата в солнечно-земной системе координат, применяется на космических аппаратах системы «ГЛОНАСС».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2017 |
|
RU2671597C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325312C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322374C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2340518C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2581106C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2341421C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539266C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЛЬБЕДО ЗЕМНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2547895C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ОГРАНИЧЕНИЕМ УГЛА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2012 |
|
RU2509694C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2711656C2 |
Изобретение относится к управлению ориентацией космического аппарата (КА) с солнечными батареями (СБ). Способ включает ориентацию первой оси КА на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю, а также ориентацию панелей СБ на Солнце путем разворота КА относительно первой оси до совмещения второй оси КА с плоскостью Солнце - КА - Земля по информации с прибора ориентации на Солнце (ПОС). Панели СБ ориентируют на Солнце путём их разворота вокруг оси, параллельной третьей оси КА, приводом СБ по информации с ПОС. При этом на каждом цикле управления определяют расчетный угол между нормалью к поверхности СБ и второй осью КА путем интегрирования расчетной угловой скорости вала привода СБ, по которой сформировано управление СБ на предыдущем цикле управления. По величине данного угла управляют скоростью вала привода СБ, уточняя величину этого угла при каждом прохождении реперного концевого контакта. Технический результат состоит в возможности обеспечить ориентацию панелей СБ на Солнце при отсутствии датчика угла поворота вала привода СБ или его неисправности. 3 ил.
Способ ориентации космического аппарата в солнечно-земной системе координат, включающий ориентацию первой оси космического аппарата на центр Земли путем разворотов относительно второй и третьей осей по информации с прибора ориентации на Землю с использованием исполнительных органов, ориентацию панелей солнечных батарей на Солнце путем разворота космического аппарата относительно первой оси до совмещения второй оси КА с плоскостью Солнце - космический аппарат - Земля по информации с прибора ориентации на Солнце, установленного на корпусе космического аппарата, с использованием исполнительных органов и разворот панелей солнечных батарей вокруг оси, параллельной третьей оси космического аппарата, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце с использованием привода солнечных батарей по информации с прибора ориентации на Солнце, отличающийся тем, что при отсутствии датчика угла поворота вала привода солнечных батарей или его неисправности на каждом цикле управления проводятся определение расчетного угла между положением нормали к поверхности солнечных батарей и второй осью космического аппарата путем интегрирования расчетной угловой скорости поворота вала привода солнечных батарей, по которой сформировано управляющее воздействие на привод солнечных батарей на предыдущем цикле управления, выдача управляющего воздействия по скорости на привод солнечных батарей по информации о расчетном угле между положением нормали к поверхности солнечных батарей и направлением на Солнце на текущем цикле управления, уточнение расчетного угла между положением нормали к поверхности солнечных батарей и второй осью космического аппарата при каждом прохождении реперного концевого контакта.
| А.М | |||
| Климарев, Ю.А.Тентилов и др | |||
| Бигиродинная система ориентации космического аппарата на высокоэллиптической орбите | |||
| В сб.: Космические вехи: сб | |||
| научных трудов, посв | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| акад | |||
| М.Ф | |||
| Решетнева | |||
| Красноярск | |||
| ИП Суховольская Ю.П., 2009 | |||
| с | |||
| Способ применения резонанс конденсатора, подключенного известным уже образом параллельно к обмотке трансформатора, дающего напряжение на анод генераторных ламп | 1922 |
|
SU129A1 |
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2414392C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| US 6142422 A, 07.11.2000 | |||
| US 4759517 A, 26.07.1988. | |||

