ПРИОРИТЕТ
[0001] Данная заявка является частично продолжающей заявкой заявки США №14/945163, поданной 18 ноября 2015 года и озаглавленной «Контроллер и способ управления штанговой насосной установкой», содержание которой включено в данный документ посредством ссылки, и ее приоритет заявляется по указанной заявке США.
ПРЕДПОСЫЛКИ
[0002] Изобретение относится в целом к штанговым насосным установкам и в частности к системе и способу для управления штанговой насосной установкой.
[0003] Большинство известных штанговых насосных установок (также называемых поверхностными насосными установками) применяются в скважинах для создания потока флюида, например нефти и воды. К примерам штанговых насосных установок относятся, без ограничения этим, линейные насосные установки и балансирные насосные установки. Штанговые насосные установки обеспечивают преобразование вращательного движения первичного источника движущей силы, например двигателя или электродвигателя, в возвратно-поступательное движение над устьем скважины. Данное движение, в свою очередь, используется для приведения в действие глубинного поршневого насоса через соединение с помощью колонны насосных штанг. Колонна насосных штанг, которая может проходить на несколько миль в длину, обеспечивает передачу возвратно-поступательного движения от устья скважины, расположенного на поверхности, к находящемуся под землей поршню, или плунжеру, и клапанам, расположенным в зоне переноса флюида в скважине. Возвратно-поступательное движение поршневых клапанов обеспечивает прохождение флюида вверх по длине колонны насосных штанг к устью скважины.
[0004] Компоненты, в том числе, например, но без ограничения этим, двигатели, штанги и коробки передач, подвергаются воздействию разнообразных механических напряжений. Данные напряжения вызывают усталостную нагрузку в различных компонентах штанговой насосной установки и уменьшают срок службы оборудования. Кроме того, данные напряжения повышают вероятность повреждения штанговой насосной установки или ее компонента. Уменьшенный срок службы и повреждения приводят к затратам, связанным с эксплуатацией штанговой насосной установки. К таким затратам могут относиться, например, расходы на обслуживание, на замену компонента, а также потери, связанные с простоем и снижением производительности.
[0005] Большинство известных штанговых насосных установок содержат контроллер штанговой насосной установки, который приводит указанную установку в действие соответствующим способом, обеспечивающим сведение к минимуму повреждений компонентов и увеличение срока службы установки. Например, контроллер штанговой насосной установки может обеспечивать работу установки при определенных рабочих скоростях, которые находятся в рамках эксплуатационных нормативов, установленных производителем. Такие контроллеры насосных штанговых установок не обеспечивают устранение всех напряжений, возникающих при работе штанговой насосной установки. Некоторые напряжения и условия, вызывающие эти напряжения, могут изменяться с течением времени в процессе работы установки. Одно из таких напряжений вызвано ударом по флюиду. Удар по флюиду возникает при соударении поршня насоса с поверхностью флюида, находящегося в насосе. Возникновение удара по флюиду и создаваемых им напряжений, действующих на штангу, двигатель и коробку передач штанговой насосной установки, изменяется в процессе эксплуатации. Например, на то, в какой момент своего хода поршень соударяется с поверхностью флюида, влияют изменения притока в приемник, давления и наполнения насоса.
КРАТКОЕ ОПИСАНИЕ
[0006] Согласно одному аспекту предложен контроллер для штанговой насосной установки. Контроллер обеспечивает работу штанговой насосной установки при определенной скорости работы насоса. Контроллер содержит процессор, выполненный с возможностью обеспечения работы поршня насоса штанговой насосной установки с первой скоростью. Процессор также выполнен с возможностью определение уровня наполнения насоса для хода его поршня на основании сигнала о положении и сигнала о нагрузке. Кроме того, процессор выполнен с возможностью уменьшения скорости работы насоса до второй скорости на основании уровня наполнения насоса.
[0007] Согласно другому аспекту предложен способ управления штанговой насосной установкой. Способ включает определение положения поршня насоса и нагрузки на поршень насоса. Способ также включает расчет уровня наполнения насоса на основании указанных положения поршня и нагрузки на поршень. Кроме того, способ включает обеспечение работы штанговой насосной установки при заданной скорости работы насоса, равной первой скорости. Способ также включает уменьшение заданной скорости работы насоса до второй скорости на основании уровня наполнения насоса и положения поршня насоса. Способ также включает увеличение заданной скорости работы насоса до третей скорости после вхождения поршня насоса в контакт с поверхностью флюида внутри цилиндра штанговой насосной установки.
[0008] Согласно еще одному аспекту предложена штанговая насосная установка. Штанговая насосная установка содержит насос, штангу и контроллер. Погружной насос содержит поршень, выполненный с возможностью работы внутри цилиндра. Штанга соединена с двигателем и насосом и предназначена для обеспечения работы насоса при заданной скорости. Контроллер соединен с двигателем и выполнен с возможностью обеспечения движения поршня насоса с заданной скоростью во время хода вниз. Заданная скорость работы насоса равна первой скорости. Контроллер также выполнен с возможностью замедления хода поршня насоса во время хода вниз так, чтобы заданная скорость работы насоса была равна второй скорости. Кроме того, контроллер выполнен с возможностью ускорения поршня насоса во время хода вниз после его контакта с поверхностью флюида, находящегося внутри цилиндра.
[0009] Согласно еще одному аспекту в данном изобретении предложен контроллер, предназначенный для обеспечения работы штанговой насосной установки при определенной скорости работы насоса и содержащий процессор, который выполнен с возможностью: обеспечения работы поршня насоса штанговой насосной установки при первой скорости поршня на протяжении его хода, определения уровня наполнения насоса для хода поршня на основании сигнала о положении и сигнала о нагрузке, уменьшения первой скорости поршня насоса до второй скорости поршня насоса на основании уровня наполнения насоса для хода поршня в преддверии удара по флюиду во время хода поршня, а также повышения второй скорости хода поршня до третьей скорости хода поршня насоса во время хода поршня после удара по флюиду.
[0010] Согласно еще одному аспекту в данном изобретении предложен способ управления штанговой насосной установкой, включающий: определение положения поршня насоса и нагрузки на поршень насоса, расчет уровня наполнения насоса на основании указанных положения и нагрузки, обеспечение работы штанговой насосной установки при первой скорости, уменьшение указанной первой скорости работы насоса до второй скорости на основании уровня наполнения насоса и положения поршня насоса в преддверии удара по флюиду и увеличение второй скорости работы насоса до третьей скорости работы насоса после удара по флюиду, причем указанные этапы определения, расчета, обеспечения работы, уменьшения и увеличения скорости выполняют на протяжении одного хода поршня насоса.
[0011] Согласно еще одному аспекту в данном изобретении предложена штанговая насосная установка, содержащая насос, содержащий поршень и цилиндр, причем поршень насоса выполнен с возможностью работы внутри указанного цилиндра, штангу, соединенную с двигателем и указанным насосом и выполненную с возможностью обеспечения работы насоса при определенной скорости, и контроллер, соединенный с указанным двигателем и выполненный с возможностью обеспечения движения поршня насоса с первой скоростью во время хода вниз, замедления поршня насоса во время хода вниз так, чтобы скорость работы насоса была равна второй скорости, и ускорения поршня насоса во время хода вниз после его контакта с поверхностью флюида внутри цилиндра насоса.
ЧЕРТЕЖИ
[0012] Эти и другие особенности, аспекты и преимущества данного изобретения станут более понятны при прочтении нижеследующего подробного описания со ссылкой на прилагаемые чертежи, на всем протяжении которых одинаковые номера позиций обозначают одинаковые элементы и на которых:
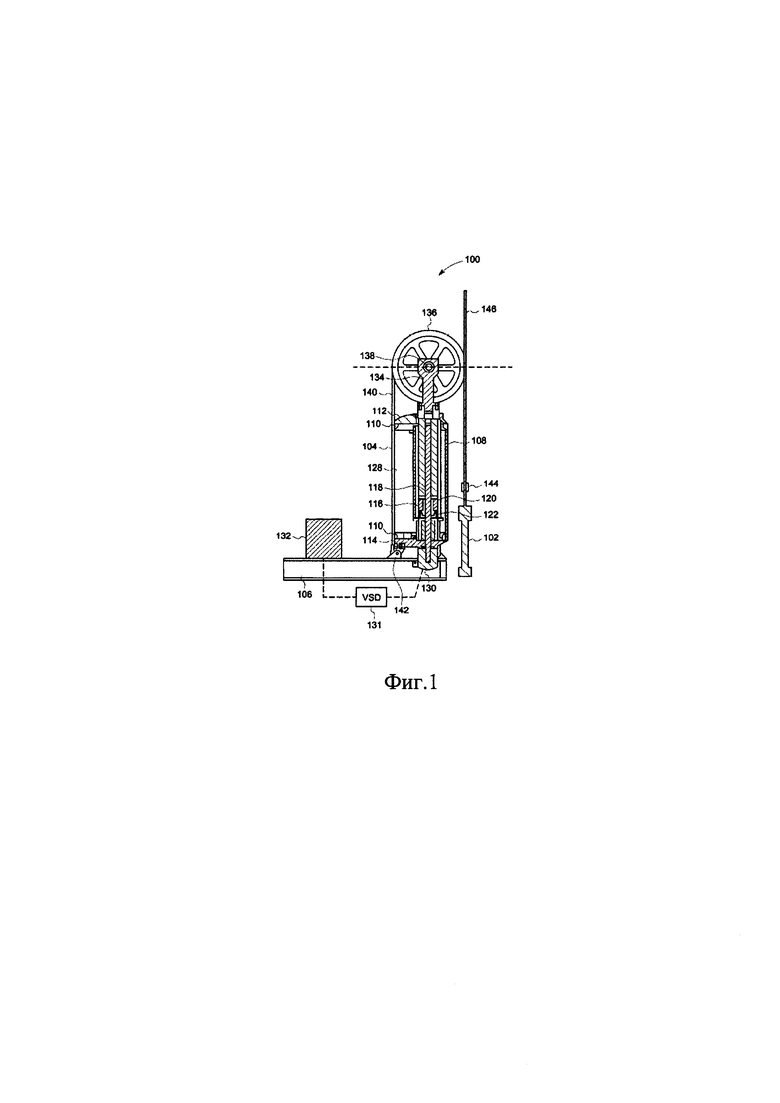
[0013] фиг. 1 изображает разрез иллюстративной штанговой насосной установки в полностью втянутом положении,
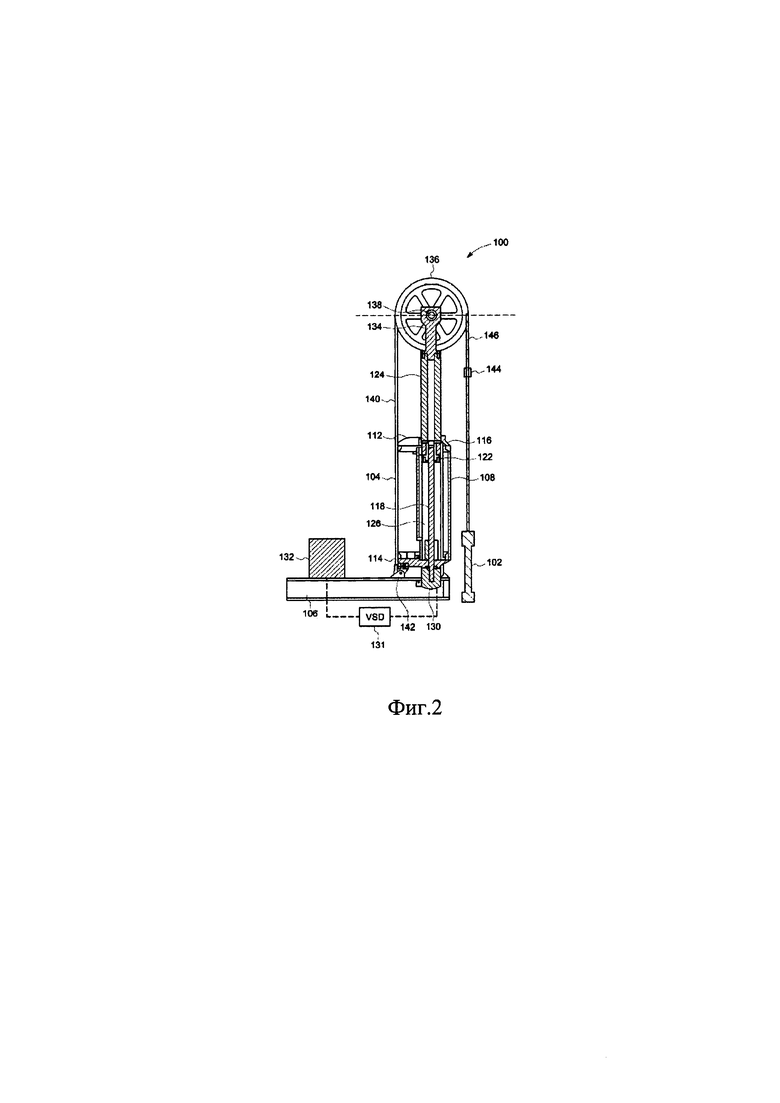
[0014] фиг. 2 изображает разрез штанговой насосной установки, показанной на фиг. 1, в полностью выдвинутом положении,
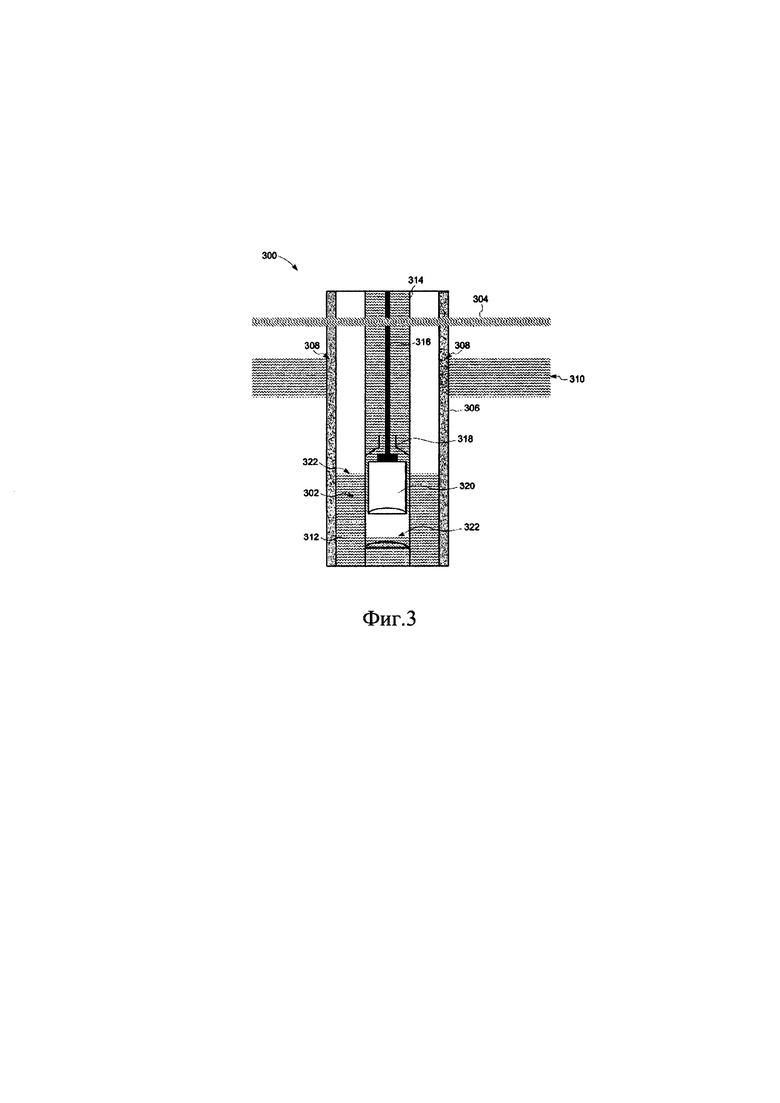
[0015] фиг. 3 изображает разрез иллюстративной подземной скважины для штанговой насосной установки, показанной на фиг. 1 и 2,
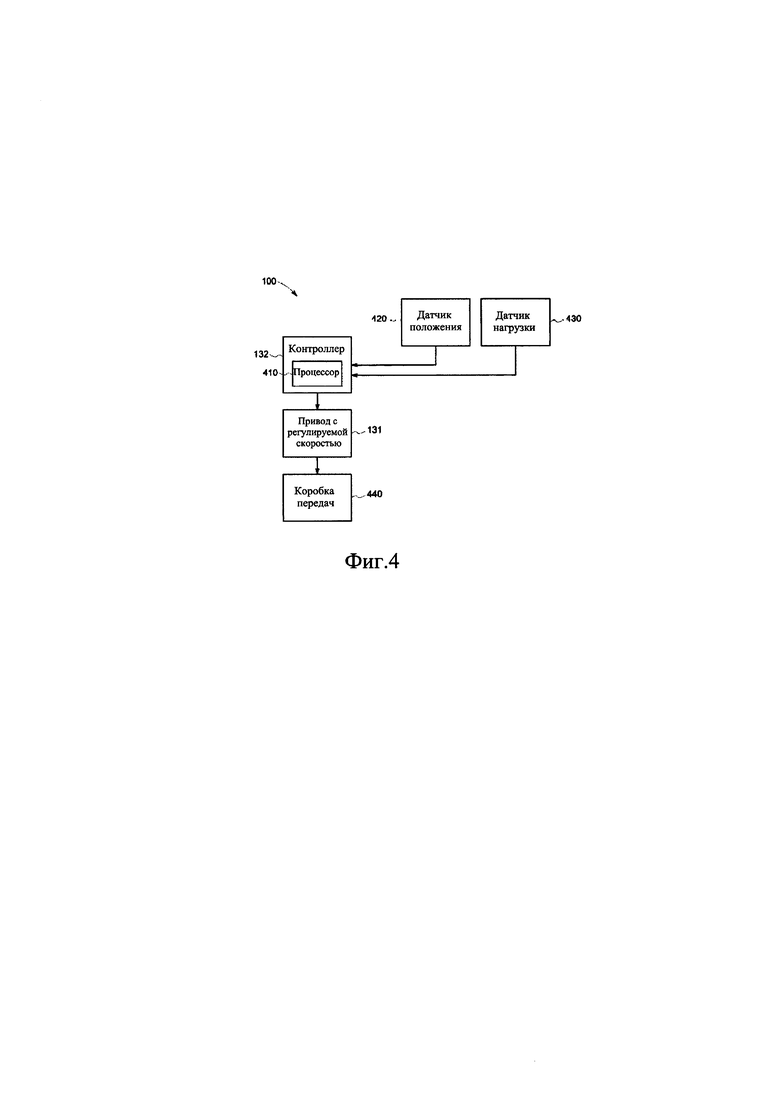
[0016] фиг. 4 изображает структурную схему штанговой насосной установки, показанной на фиг. 1 и 2,
[0017] фиг. 5 изображает диаграмму типичных профилей скоростей для штанговой насосной установки, показанной на фиг. 1 и 2,
[0018] фиг. 6 изображает блок-схему иллюстративного способа управления штанговой насосной установкой, показанной на фиг. 1 и 2,
[0019] фиг. 7 изображает схему иллюстративной штанговой насосной установки балансирного типа, и
[0020] фиг. 8 иллюстрирует способ оценки интенсивности удара по флюиду.
[0021] Если не указано иное, чертежи, приведенные в данном документе, предназначены для иллюстрации особенностей вариантов выполнения данного изобретения. Предполагается, что данные признаки могут применяться в целом ряде систем, содержащих один или более вариантов выполнения данного изобретения. Фактически, чертежи не обязательно охватывают все типичные признаки, известные специалистам в данной области техники и необходимые для реализации на практике вариантов выполнения, описанных в данном документе.
ПОДРОБНОЕ ОПИСАНИЕ
[0022] В нижеприведенных описании и формуле изобретения сделана ссылка на ряд выражений, которые имеют следующие значения.
[0023] Формы единственного числа охватывают и формы множественного числа, если из контекста с очевидностью не следует иное.
[0024] Выражение «возможный» или «возможно» означает, что описанное далее событие или обстоятельство может иметь место или не иметь места, при этом описание охватывает случаи, когда указанное событие происходит, и случаи, в которых оно отсутствует.
[0025] Используемые в описании и в формуле изобретения формулировки, обозначающие примерное соответствие, могут применяться для определения любого количественного показателя, который может изменяться в допустимых пределах без изменения основной функции, к которой он относится. Соответственно, значение, определяемое с помощью таких выражений, как «примерно», «приблизительно» и «по существу», не ограничено указанным конкретным значением. По меньшей мере в некоторых примерах формулировка, обозначающая примерное соответствие, может соответствовать точности инструмента, используемого для измерения определяемой величины. В этом случае и на протяжении всего описания и формулы изобретения пределы числовых диапазонов могут объединяться и/или меняться местами, причем такие диапазоны тождественны и включают все входящие в них промежуточные диапазоны при отсутствии иных указаний в контексте или формулировке.
[0026] Используемые в данном документе термины «процессор» и «компьютер», а также родственные выражения, например, «обрабатывающее устройство», «вычислительное устройство» и «контроллер» не ограничены только теми интегральными схемами, которые в данной области называют компьютером, а относятся в широком смысле к микроконтроллеру, микрокомпьютеру, программируемому логическому контроллеру (PLC), специализированной интегральной схеме и другим программируемым схемам, при этом указанные термины в данном документе используются взаимозаменяемым образом. В вариантах выполнения, описанных в данном документе, память может содержать в том числе, но без ограничения этим, машиночитаемый носитель информации, такой как оперативное запоминающее устройство (RAM), и энергонезависимый машиночитаемый носитель информации, такой как флэш-память. Как вариант, также может использоваться гибкий диск, постоянное запоминающее устройство в виде компакт-диска (CD-ROM), магнитооптический диск (MOD) и/или универсальный цифровой диск (DVD). Кроме того, в вариантах выполнения, описанных в данном документе, дополнительные каналы ввода данных могут представлять собой, без ограничения этим, компьютерные периферийные устройства, связанные с интерфейсом оператора, такие как мышь и клавиатура. Как вариант, также могут использоваться другие компьютерные периферийные устройства, которые могу содержать, например, но без ограничения этим, сканер. Кроме того, в иллюстративном варианте выполнения дополнительные каналы вывода данных могут содержать, без ограничения этим, монитор интерфейса оператора.
[0027] Кроме того, используемые в данном документе выражения «программное обеспечение» и «программно-аппаратное обеспечение» являются взаимозаменяемыми и охватывают любую компьютерную программу, хранящуюся в памяти и предназначенную для выполнения персональными компьютерами, терминалами, клиентами и серверами.
[0028] Предполагается, что используемое в данном документе выражение «энергонезависимый машиночитаемый носитель информации» обозначает любое реальное устройство на основе компьютера, выполненное с помощью любого способа или технологии для краткосрочного или долговременного хранения информации, например машиночитаемых команд, структур данных, программных модулей и подмодулей или других данных, хранящихся в любом устройстве. Таким образом, способы, описанные в данном документе, могут быть закодированы в виде выполняемых команд, заключенных в реальном, энергонезависимом, машиночитаемом носителе информации, которым может быть, без ограничения этим, запоминающее устройство и устройство памяти. Такие команды при выполнении их процессором обеспечивают реализацию процессором по меньшей мере части способов, описанных в данном документе. Кроме того, используемое в данном документе выражение «энергонезависимый машиночитаемый носитель информации» охватывает все реальные машиночитаемые носители информации, к которым относятся, без ограничения этим, энергонезависимые компьютерные запоминающие устройства, в том числе постоянные и непостоянные носители, а также съемные и несъемные носители, такие как встроенное программное обеспечение, реальная и виртуальная память, CD-ROM, DVD и любой другой источник цифровой информации, такой как сеть или Интернет, а также еще не разработанные цифровые средства, при этом единственным исключением является временный, передаваемый сигнал.
[0029] Кроме того, используемое в данном документе выражение «в режиме реального времени» относится к по меньшей мере одному из следующего: времени возникновения взаимосвязанных событий, времени измерения и сбора заданных данных, времени на обработку данных и времени отклика системы на события и окружающую среду. В вариантах выполнения, описанных в данном документе, указанные действия и события возникают по существу мгновенно.
[0030] Варианты выполнения данного изобретения относятся к управлению штанговыми насосными установками. Штанговые насосные установки и контроллеры штатных насосных установок, описанные в данном документе, обеспечивают мониторинг в режиме реального времени механических напряжений, возникающих на протяжении хода насоса, в том числе, например, но без ограничения этим, напряжений, возникающих в результате удара по флюиду. Контроллеры, описанные в данном документе, используют переменные скорости насоса на протяжении его хода для замедления поршня насоса перед контактом с поверхностью флюида в цилиндре насоса. После вхождения поршня насоса в контакт с поверхностью флюида скорость насоса увеличивается для обеспечения поддержания общей средней скорости работы насоса на протяжении его хода. Контроллеры, описанные в данном документе, также выполнены с возможностью мониторинга механических напряжений, возникающих на протяжении хода поршня насоса в результате использования переменных скоростей работы насоса во время хода поршня насоса. Кроме того, контроллеры, описанные в данном документе, модулируют переменную скорость работы насоса на протяжении его хода для уменьшения избыточных напряжений при их возникновении.
[0031] На фиг. 1 и 2 изображены разрезы иллюстративной штанговой насосной установки 100 соответственно в полностью втянутом (1) и полностью выдвинутом (2) положениях. В иллюстративном варианте выполнения штанговая насосная установка 100 (также известная как линейная насосная установка) представляет собой вертикально ориентированную штанговую насосную установку с вертикальным вектором линейного перемещения, проходящим вблизи устья 102 скважины. Установка 100 предназначена для передачи вертикального линейного движения в подземную скважину (не показана) с помощью колонны насосных штанг (не показана) для образования потока флюида. Установка 100 содержит резервуар 104 высокого давления, соединенный с установочной опорной конструкцией 106. В некоторых вариантах выполнения конструкция 106 прикреплена к неподвижному фундаменту, расположенному смежно с подземной скважиной для добычи флюида. Резервуар 104 может быть образован корпусом 108, имеющим цилиндрическую или другую соответствующую форму и образованным из формованной пластины и торцевых фланцев 110, полученных литьем или машинной обработкой. К торцевым фланцам 110 прикреплены соответственно верхний и нижний приемники 112 и 114 давления.
[0032] Через верхний и нижний приемники 112 и 114 давления соответственно проходит линейный приводной узел 116. Данный узел 116 содержит вертикально ориентированный резьбовой винт 118 (также известный как роликовый винт), планетарную роликовую гайку 120 (также известную как гаечный узел роликового винта), поршневой толкатель 122, установленный в трубе 124, и направляющую трубу 126.
[0033] Роликовый винт 118 присоединен к внутренней поверхности 128 нижнего приемника 114 давления и проходит вверх к верхнему приемнику 112 резервуара высокого давления. Конец вала винта 118 проходит далее под нижним приемником 114 для соединения с зажимной муфтой (не показана) двигателя 130. Двигатель 130 присоединен к приводу 131 с регулируемой скоростью (VSD), который выполнен таким образом, что обеспечена возможность непрерывного регулирования скорости вращения двигателя 130. Кроме того, привод 131 изменяет направление вращения двигателя 130 на обратное так, что диапазон крутящего момента и скорости вращения двигателя может быть эффективно удвоен. Для движения поршня вверх винт 118 приводится во вращение по часовой стрелке, а для движения поршня вниз - против часовой стрелки. Двигатель 130 связан с контроллером 132 штанговой насосной установки. В иллюстративном варианте выполнения контроллер 132 обеспечивает передачу команд к двигателю 130 и приводу 131 для обеспечения управления скоростью, направлением и крутящим моментом винта 118.
[0034] Внутри резервуара 104 резьбовая часть роликового винта 118 сопряжена с планетарным гаечным узлом 120 роликового винта. Гаечный узел 120 неподвижно прикреплен к нижней части толкателя 122 так, что при повороте винта 118 в направлении по часовой стрелке толкатель 122 перемещается вверх. При повороте винта 118 против часовой стрелки толкатель 122 перемещается вниз. Данное перемещение проиллюстрировано в целом на фиг. 1 и 2. Направляющая труба 126 расположена так, что она окружает тубу 124 поршневого толкателя коаксиальным образом, и неподвижно прикреплена к нижнему приемнику 114 давления. Труба 126 проходит вверх через корпус 108 и входит в верхний приемник 112 резервуара высокого давления.
[0035] К верхнему концу поршневого толкателя 122 неподвижно присоединены верхний толкатель 134 и канатный лебедочный узел 136, которые уплотнены относительно указанного конца. Лебедочный узел 136 имеет ось 138, которая проходит в боковом направлении через верхнюю часть верхнего толкателя 134. Поверх узла 136 проходит канат 140, уложенный в канавки, выполненные с помощью машинной обработки в наружной окружной поверхности узла 136. Канат 140 присоединен к креплениям 142, расположенным на установочной опорной конструкции 106 на стороне резервуара 104, противоположной устью 102 скважины. На устьевой стороне резервуара 104 канат 140 присоединен к несущему брусу 144, который, в свою очередь, присоединен к полированной штанге 146, отходящей от устья 102 скважины.
[0036] Штанговая насосная установка 100 обеспечивает передачу линейного усилия и движения через планетарный узел 120. Двигатель 130 соединен с вращающимся элементом узла 120. Путем вращения по часовой стрелке или против часовой стрелки двигатель 130 может оказывать влияние на поступательное движение планетарной гайки 120 (и, вследствие соединения, толкателя 122) вдоль длины роликового винта 118.
[0037] На фиг. 3 изображен разрез иллюстративной подземной скважины 300, в которую может быть установлена штанговая насосная установка 100, показанная на фиг. 1 и 2. Подземная скважина 300 содержит насос 302, расположенный под поверхностью 304. Скважина 300 содержит обшивку 306, которая обеспечивает обсадку скважины. Обшивка 306 имеет перфорированные отверстия 308 в зоне 310 переноса флюида. Отверстия 308 способствуют прохождению флюида, например, но без ограничения этим, нефти или воды, в скважину 300.
[0038] Скважина 300 содержит трубопровод 314, который способствует извлечению флюида 312 из скважины 300 на поверхность 304. Насос 302 создает внутри скважины 300 давление, которое выталкивает флюид 312 вверх к поверхности 304 по трубопроводу 314. Насос 302 соединен со штангой 316, иногда называемой колонной насосных штанг. Кроме того, на поверхности 304 штанга 316 соединена с устьем 102 (показанным на фиг. 1 и 2), при помощи которого штанга 316 соединена с двигателем 130 (также показанным на фиг. 1 и 2).
[0039] Насос 302 содержит цилиндр 318, внутри которого перемещается вверх и вниз поршень 320. Поршень 320 насоса перемещается вверх и вниз при помощи штанги 316, которая приводится в действие двигателем 130, с созданием давления в скважине 300. Когда поршень 320 перемещается вниз в процессе опускания, он контактирует с поверхностью 322 флюида 312. Этот поверхностный контакт приводит к возникновению механического напряжения в штанге 316 и двигателе 130, а также в любой зубчатой передаче или коробке передач (не показана), с помощью которой они соединены. Указанное напряжение называют ударом по флюиду. При подъеме поршень 320 перемещается вверх. Одно движение вниз и одно движение вверх образуют ход поршня насоса. На протяжении хода поршня механические напряжения, возникшие в результате ускорения и замедления, действуют на штангу 316, двигатель 130 и другие компоненты штанговой насосной установки 100.
[0040] На фиг. 4 изображена структурная схема штанговой насосной установки 100 (показанной на фиг. 1 и 2), которая содержит контроллер 132 и двигатель 130 (оба показаны на фиг. 1 и 2). Контроллер 132 содержит процессор 410. Штанговая насосная установка также содержит датчик 420 положения и датчик 430 нагрузки. Датчик 420 положения и датчик 430 нагрузки расположены на поверхности и предназначены для измерения положения полированной штанги 146 (показанной на фиг. 1 и 2) и действующей на нее нагрузки. Выполняемые на поверхности измерения положения и нагрузки относятся к положению штанги 316 (показана на фиг. 3) в скважине и нагрузке на штангу 316 в скважине.
[0041] С помощью двигателя 130 контроллер 132 через коробку 440 передач приводит насос 302 в действие при скорости работы насоса, измеряемой в ходах в минуту (SPM). Контроллер 132 обеспечивает расчет средней скорости работы насоса для его хода на основании наполнения насоса. Под наполнением насоса понимается уровень флюида 312, заполняющего цилиндр 318 насоса 302 (все указанные элементы показаны на фиг. 3). Контроллер 132 обеспечивает управление средней скоростью работы насоса для поддержания максимально высокого возможного уровня наполнения. В случае низкого наполнения насоса контроллер 132 приводит в действие двигатель 130, коробку 440 передач и насос 302 более медленно. Если же наполнение насоса высокое, контроллер 132 может свободно приводить двигатель 130, коробку 440 передач и насос 302 в действие настолько быстро, насколько это позволяют другие ограничения, предъявляемые к штанговой насосной установке 100.
[0042] Процессор 410 выполнен с возможностью приема сигнала о положении от датчика 420 и сигнала о нагрузке от датчика 430 в процессе эксплуатации штанговой насосной установки 100. Процессор 410 в режиме реального времени рассчитывает диаграмму насоса, которая содержит данные о положении поршня 320 (показанного на фиг. 3) в скважине и о нагрузке на штангу 316 в скважине. Диаграмма насоса в режиме реального времени представляет перевод измерений положения и нагрузки, выполненных на поверхности, в положение и нагрузку в скважине.
[0043] Процессор 410 также выполнен с возможностью расчета уровня наполнения насоса на основании указанной диаграммы. Информация о положении и нагрузке в диаграмме указывает положение, в котором поршень 320 входит в контакт с поверхностью 322 флюида, например, показывая резкий скачок нагрузки. На основании уровня наполнения насоса процессор 410 устанавливает целевую среднюю скорость работы насоса для хода его поршня, которая предположительно должна быть постоянной на протяжении хода поршня насоса. Процессор 410 использует положение контакта с поверхностью 322 флюида в предыдущем ходе поршня как прогнозируемое положение контакта с поверхностью 322 в текущем ходе поршня вниз.
[0044] Кроме того, процессор 410 выполнен с возможностью уменьшения скорости работы насоса в процессе хода поршня вниз от исходной целевой скорости при приближении поршня 320 к поверхности 322 флюида. Благодаря замедлению хода поршня 320 перед его вхождением в контакт с поверхностью 322 уменьшаются механические напряжения, обусловленные ударом о флюид. После контакта с поверхностью 322 флюида поршень 320 ускоряется. Уменьшение скорости работы насоса может регулироваться на основании допустимого уровня напряжений, обусловленных ударом о флюид. Например, в некоторых вариантах выполнения пользователь контроллера 132 задает процентное значение уменьшения скорости работы насоса. В альтернативных вариантах выполнения пользователь устанавливает абсолютное значение уменьшения скорости работы насоса или абсолютную скорость работы насоса, при которой поршень 320 должен войти в контакт с поверхностью 322 флюида. В других вариантах выполнения контроллер 132 может автоматически вычислять оптимальное процентное значение уменьшения скорости работы насоса на основании рабочих параметров насосной системы. В одном или более вариантах выполнения оптимальное уменьшение скорости насоса обеспечивает возможность уменьшения с помощью контроллера ударной нагрузки на систему, которая возникает в результате удара по флюиду. Как правило, оптимальное уменьшение соответствует скорости хода поршня насоса, при которой дальнейшее уменьшение будет создавать лишь незначительное соответствующее уменьшение ударной нагрузки, вызванной ударом о флюид. Такое уменьшение скорости хода поршня насоса, в данном документе иногда называемой просто скоростью работы насоса, выполняют в преддверии удара по флюиду, то есть перед ударом о флюид во время хода поршня.
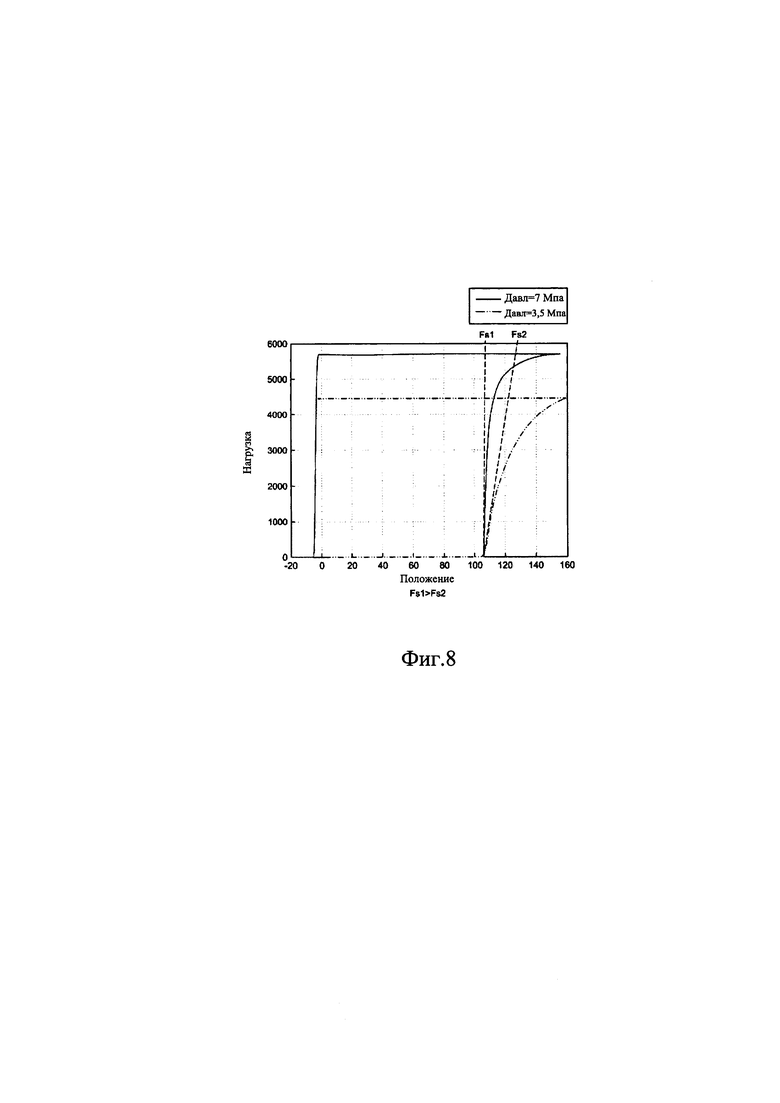
[0045] В одном или более вариантах выполнения для автоматического определения оптимального уменьшения скорости работы насоса могут использоваться один или более алгоритмов, содержащихся в процессоре контроллера насоса. Данные алгоритмы могут содержать, без ограничения этим, рабочие параметры, такие как характеристики внутри скважины (интенсивность удара по флюиду, уровень наполнения насоса, давление на впуске насоса) и средняя скорость накачки в течение хода поршня. Интенсивность удара по флюиду показывает, как резко происходит передача нагрузки от насосных штанг к неподвижному клапану непосредственно перед открытием подвижного клапана при ходе поршня вниз. Нижеприведенное уравнение иллюстрирует один способ расчета оптимального уменьшения скорости работы насоса:

где А - оптимальное уменьшение скорости при наполнении насоса, составляющем 50%, a FPs - коэффициент от 0 до 1, представляющий интенсивность удара по флюиду и вычисляемый на основании наклона диаграммы глубинного насоса во время хода его поршня, изображенной на фиг. 8.
[0046] Процессор 410 выполнен с возможностью замедления поршня 320 на основании уровня наполнения насоса для достижения желаемого пользователем или автоматически рассчитываемого уменьшения скорости работы насоса. После контакта поршня с поверхностью 322 флюида процессор 410 обеспечивает ускорение поршня 320 с поддержанием исходной целевой средней скорости работы насоса. Соответственно, контроллер 132 приводит насос 302 в действие с изменяемой скоростью на протяжении хода поршня, но при целевой средней скорости от хода к ходу.
[0047] Кроме того, процессор 410 выполнен с возможностью расчета и мониторинга механических напряжений, действующих на установку 100, в режиме реального времени с использованием модели динамических характеристик штанговой насосной установки. Более конкретно, процессор 410 использует измерения, выполняемые на поверхности датчиком 420 положения и датчиком 430 нагрузки, для оценки напряжений на штанге 316, мощности двигателя 130 и крутящего момента в коробке 440 передач. На протяжении хода поршня напряжения изменяются вследствие изменяемой скорости работы насоса, при которой контроллер 132 приводит в действие двигатель 130, коробку 440 передач и штангу 316. Модель динамических характеристик штанговой насосной установки учитывает инерционные виды напряжений и облегчает мониторинг в режиме реального времени.
[0048] В процессе эксплуатации процессор 410 может обнаруживать избыточное напряжение в штанге 316, двигателе 130 или коробке 440 передач. Процессор 410 выполнен с возможностью уменьшения ускорения, относящегося к двигателю 130, коробке 440 передач и штанге 316, в случае избыточного напряжения. Например, на протяжении хода вниз поршень 320 перемещается вниз по направлению к поверхности 322 флюида с первой скоростью. Процессор 410 выполнен с возможностью уменьшения скорости работы насоса до второй скорости перед тем, как произойдет контакт с поверхностью 322 флюида. Процессор 410 обеспечивает замедление работы насоса 302 с приведением его скорости ко второй скорости. Используя модель динамических характеристик штанговой насосной установки, при замедлении насоса 302 процессор 410 обнаруживает избыточное напряжение по меньшей мере в одном из следующих элементов: двигателе 130, коробке 440 передач и штанге 316. Процессор 410 выполнен с возможностью уменьшения обнаруженного избыточного напряжения путем уменьшения замедления, относящегося к двигателю 130, коробке 440 передач и штанге 316. В данном примере скорость работы насоса снижается не в полной мере с первой скорости до второй скорости, и поршень 320 контактирует с поверхностью 322 флюида при более высокой скорости, чем было запланировано изначально. Соответственно, после контакта поршня 320 с поверхностью 322 насос 302 ускоряется до третьей скорости для поддержания целевой средней скорости для хода поршня. Процессор 410 выполнен с возможностью расчета третьей скорости в режиме реального времени на основании скорости работы насоса в конкретный момент времени в течение хода поршня насоса и на основании целевой средней скорости работы насоса. В данном примере третья скорость ниже скорости, которая была бы необходима в случае контакта поршня 320 с поверхностью 322 при запланированной второй скорости. Обнаруженное избыточное напряжение привело к тому, что вторая скорость не была достигнута. Следовательно, для поддержания целевой средней скорости работы насоса для хода его поршня третья скорость не обязательно должна быть настолько высокой.
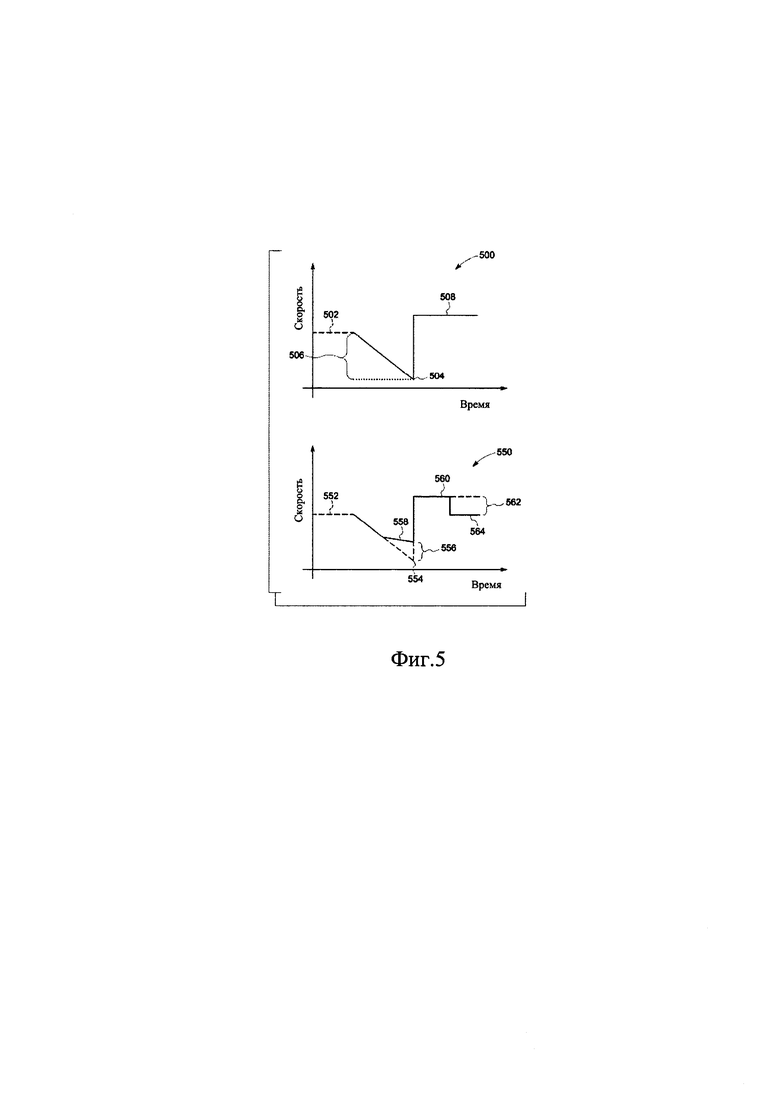
[0049] На фиг. 5 изображены два типичных профиля 500 и 550 скорости для штанговой насосной установки 100 (показанной на фиг. 1 и 2). Профили 500 и 550 скорости представлены в виде функции времени. Кроме того, профили 500 и 550 подвергаются дальнейшей обработке для сглаживания переходов скорости перед использованием указанных профилей контроллером 132 для приведения в действие двигателя 130 и насоса 302. В соответствии с фиг. 3, 4 и 5 профиль 500 скорости отображает первую скорость 502, при которой насос 302 находится в рабочем режиме. Профиль 500 показывает точку 504 контакта, в которой поршень 320 входит в контакт с поверхностью 322 флюида. Точка 504 контакта определяется на основании предыдущего хода поршня насоса и принимается за точку контакта для текущего хода поршня насоса. Несмотря на то что профиль 500 выражен в единицах времени, точка 504 отображает положение во время хода поршня насоса.
[0050] Профиль 500 скорости отображает замедление 506 для уменьшения первой скорости 502 до второй скорости в точке 504 контакта. Наклон участка замедления 506 определяется с помощью контроллера 132. При контакте поршня 320 с поверхностью 322 флюида скорость работы насоса увеличивается со второй скорости до третьей скорости 508. Третья скорость 508 превышает первую скорость 502 с обеспечением поддержания исходной целевой средней скорости насоса для хода поршня насоса.
[0051] Профиль 550 скорости отображает первую скорость 552, при которой насос 302 находится в рабочем режиме. Профиль 550 показывает точку 554 контакта, в которой поршень 320 входит в контакт с поверхностью 322 флюида. Скорость работы насоса снижается с первой скорости до второй скорости при контакте поршня 320 с поверхностью 322 флюида. Однако в процессе замедления поршня 320 при его ходе вниз обнаруживается избыточное механическое напряжение. В результате профиль 550 подвергается модуляции 556 для уменьшения замедления и ослабления обнаруженного избыточного напряжения. Следовательно, скорость работы насоса снижается не в полной мере с первой скорости до второй скорости, соответствующей точке 554 контакта. Фактически, поршень 320 контактирует с поверхностью флюида при модулированной скорости 558.
[0052] После вхождения поршня 320 в контакт с поверхностью 322 флюида скорость работы насоса увеличивается до третьей скорости 560. Третья скорость 560 рассчитывается с обеспечением поддержания целевой средней скорости работы насоса на протяжении хода его поршня.
[0053] Другое избыточное напряжение обнаруживается во время работы насоса 302 при третьей скорости 560 во время хода поршня насоса. В результате профиль 550 подвергается модуляции 562 для снижения скорости работы насоса с третьей скорости 560 до четвертой скорости 564. Данная уменьшенная скорость обеспечивает ослабление избыточного напряжения.
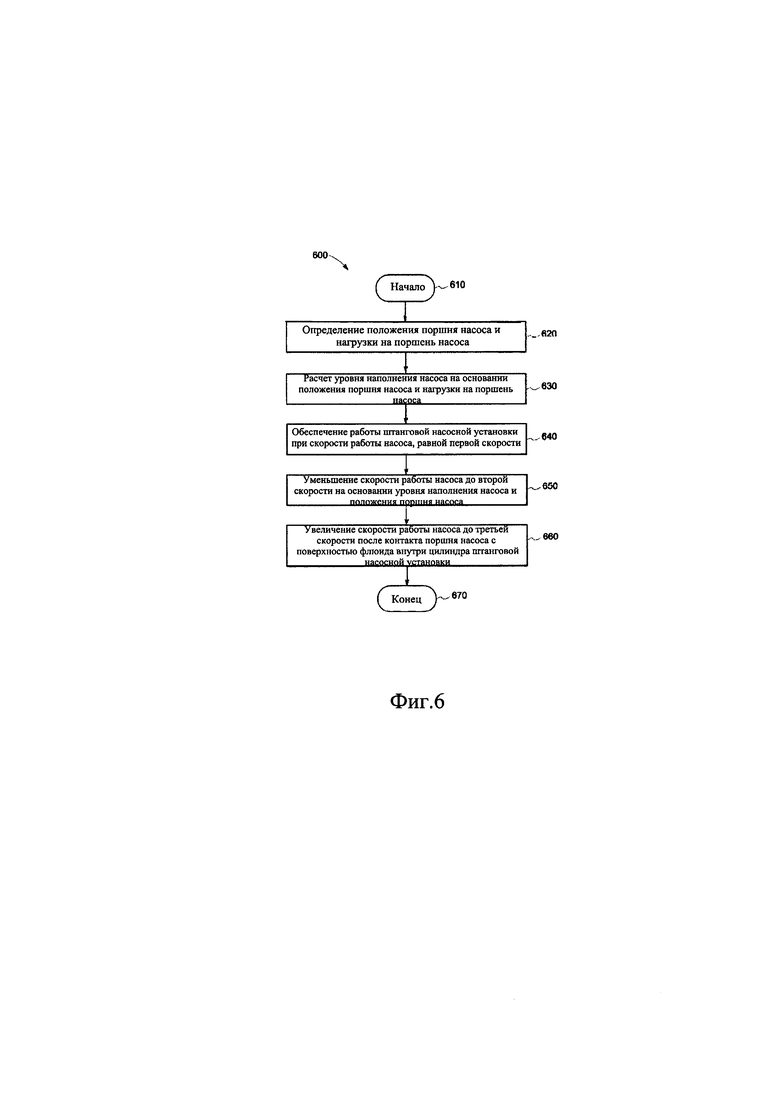
[0054] На фиг. 6 изображена блок-схема иллюстративного способа 600 управления штанговой насосной установкой 100 (показанной на фиг. 1 и 2). Выполнение способа начинают на начальном этапе 610. На этапе 620 измерения датчик 420 положения и датчик 430 нагрузки обеспечивают измерение положения на поверхности и нагрузки на поверхности, которые переводят в положение поршня насоса и нагрузку на поршень насоса. Эти глубинные значения рассчитывают по диаграмме насоса в режиме реального времени с помощью контроллера 132.
[0055] На этапе 630 восстановления наполнения насоса контроллер 132 обеспечивает определение уровня наполнения насоса на основании положения поршня насоса и нагрузки на поршень. Уровень наполнения насоса представляет собой базис для расчета средней скорости работы насоса для хода его поршня. Уровень наполнения насоса также является базисом для определения точки контакта, в которой поршень 320 войдет в контакт с поверхностью 322 флюида.
[0056] На этапе 640 хода поршня вниз штанговая насосная установка 100 работает при скорости насоса, равной первой скорости. Когда поршень 320 приближается к поверхности 322 флюида, на этапе 650 уменьшения скорости скорость работы насоса снижают с первой скорости до второй скорости так, что поршень 320 входит в контакт с поверхностью 322 при меньшей скорости, что обеспечивает уменьшение напряжений, обусловленных ударом по флюиду.
[0057] После контакта поршня 320 с поверхностью 322 флюида, на этапе 660 ускорения скорость работы насоса увеличивают до третьей скорости с обеспечением поддержания средней скорости работы насоса на протяжении хода его поршня. Выполнение способа завершают на конечном этапе 670.
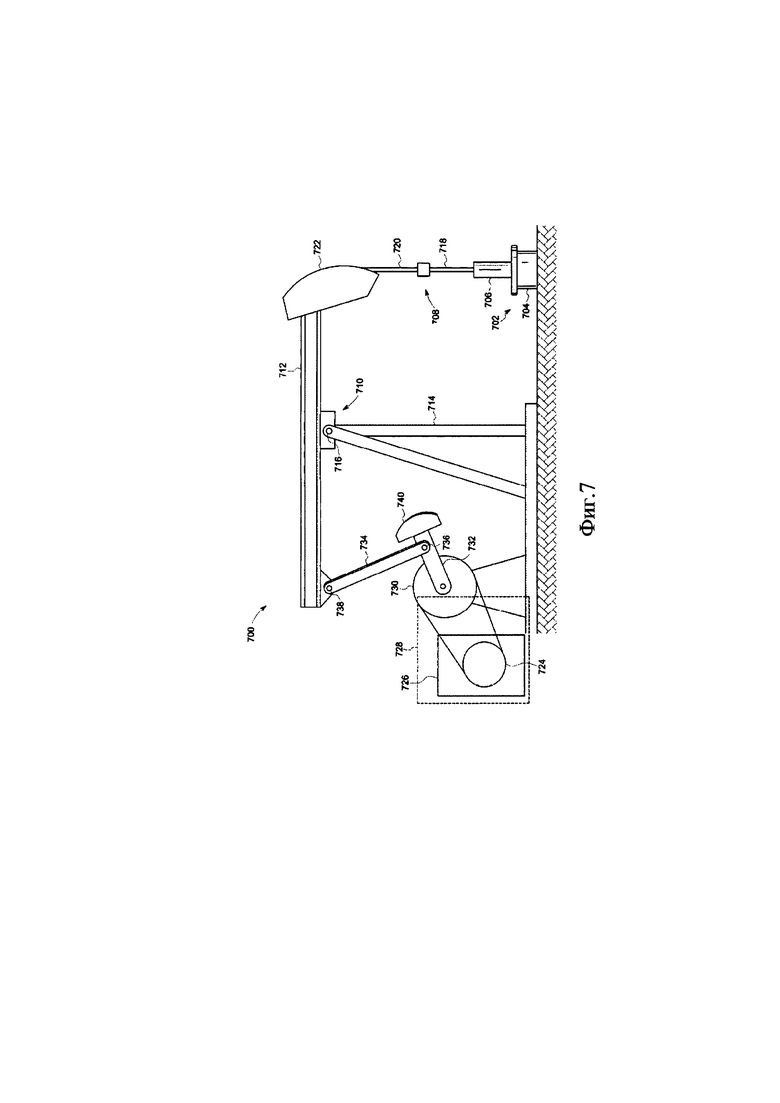
[0058] На фиг. 7 изображена схема иллюстративной штанговой насосной установки балансирного типа, а именно балансирной насосной установки 700, предназначенной для использования в устье 702 скважины, проходящей под поверхностью для добычи газа и флюида, например подземной скважины 300 (показанной на фиг. 3). Устье 702 скважины содержит верхнюю часть обшивки 704 и трубопровод 706. Обшивка 704 и трубопровод 706 проходят в скважину для содействия добыче газа и флюида с помощью глубинного насоса, например насоса 302 (показанного на фиг. 3), приводимого в действие штангой 708.
[0059] Балансирная насосная установка 700 содержит наземный опорный блок 710, который обеспечивает подвешивание штанги 708 в скважине. Блок 710 содержит подвижный балансир 712, шарнирно соединенный со стойкой 714 балансира при помощи штифта 716. Штанга 708 содержит полированную штангу 718, проходящую в обшивку 704 и трубопровод 706 через устье 702 скважины. Кроме того, штанга 708 содержит канат 720, который обеспечивает гибкое присоединение штанги 708 к балансиру 712 в головке 722 балансира.
[0060] Балансирная насосная установка 700 приводится в действие двигателем 724 при помощи коробки 726 передач. Двигатель 724 и коробка 725 передач совместно образуют приводную систему 728, которая в некоторых вариантах выполнения может содержать один или более ремней, кривошипов или других компонентов. С помощью коробки 726 передач двигатель 724 обеспечивает поворот кривошипа 730, содержащего рычаг 732. Рычаг 732 кривошипа присоединен к балансиру 712 на конце, противоположном головке 722 балансира, с помощью шатуна 734. Шатун 734 шарнирно присоединен к рычагу 732 кривошипа с помощью штифта 736, а также шарнирно присоединен к балансиру 712 с помощью штифта 738. Шатун 734 обеспечивает преобразование углового перемещения рычага 732 кривошипа в линейное перемещение балансира 712. Линейное перемещение балансира 712 вызывает возвратно-поступательное перемещение штанги 708 для обеспечения работы глубинного насоса.
[0061] При ходе поршня установки 700 вверх вес штанги 708, подвешенной к балансиру 712, переносится на кривошип 730 и приводную систему 728. Рычаг 732 содержит противовес 740, предназначенный для уменьшения нагрузки на приводную систему 728 во время хода поршня вверх.
[0062] Вышеописанная штанговая насосная установка и контроллеры штанговой насосной установки обеспечивают в режиме реального времени мониторинг механических напряжений, возникающих на протяжении хода поршня насоса, в том числе, например, но без ограничения этим, напряжений, обусловленных ударом по флюиду. Контроллеры, описанные в данном документе, используют изменяемые скорости работы насоса на протяжении хода поршня для замедления хода поршня насоса перед контактом с поверхностью флюида в цилиндре насоса. После контакта поршня насоса с поверхностью флюида скорость работы насоса увеличивается для поддержания общей средней скорости на протяжении хода поршня насоса. Описанные в данном документе контроллеры также предназначены для мониторинга напряжений, которые возникают на протяжении хода поршня насоса в результате использования изменяемых скоростей работы насоса в течение данного хода. Кроме того, описанные контроллеры модулируют изменяемую скорость работы насоса на протяжении хода его поршня с обеспечением ослабления избыточных напряжений при их возникновении.
[0063] Типичным техническим эффектом, обеспечиваемым способами, системами и устройствами, описанными в данном документе, является по меньшей мере одно из следующего: (а) мониторинг напряжений в режиме реального времени на протяжении хода поршня насоса, (b) уменьшение напряжений, обусловленных ударом по флюиду, путем уменьшения скорости работы насоса перед контактом с поверхностью флюида, (с) модуляция скорости работы насоса на протяжении хода его поршня для уменьшения напряжений, обусловленных ударом по флюиду, и ускорений на протяжении хода поршня насоса, (d) упрощение эксплуатации штанговых насосных установок без выхода за рамки нормативов, установленных производителем и оператором, (е) увеличение срока службы компонентов штанговой насосной установки и (f) уменьшение времени технического обслуживания и простоя штанговых насосных установок.
[0064] Иллюстративные варианты выполнения способов, систем и устройств для контроллеров штанговых насосных установок не ограничены конкретными вариантами выполнения, описанными в данном документе. Напротив, компоненты систем и/или этапы способов могут использоваться независимо и отдельно от других компонентов и/или этапов, описанных в данном документе. Например, способы также могут использоваться в комбинации с другими, нетиповыми контроллерами штанговых насосных установок, и их реализация на практике не ограничена только системами и способами, описанными в данном документе. Иллюстративный вариант выполнения может быть реализован и использован применительно ко многим другим областям применения, видам оборудования и системам, которые могут обеспечивать преимущества вследствие снижения стоимости, упрощения, коммерческой доступности, повышенной надежности при высоких температурах и увеличенной емкости памяти.
[0065] Несмотря на то что конкретные признаки различных вариантов выполнения изобретения могут быть показаны на одних чертежах и не показаны на других, это сделано исключительно для удобства. Согласно принципам изобретения любой признак, изображенный на чертеже, может быть обозначен и/или заявлен в комбинации с любым признаком, изображенным на любом другом чертеже.
[0066] В приведенном описании примеры используются для раскрытия вариантов выполнения, в том числе предпочтительного варианта выполнения, а также для обеспечения возможности реализации вариантов выполнения на практике, включая изготовление и использование любых устройств или установок и осуществление любых предусмотренных способов, любым специалистом. Объем правовой охраны изобретения определен формулой изобретения и может охватывать другие примеры, очевидные специалистам в данной области техники. Подразумевается, что такие другие примеры находятся в рамках объема формулы изобретения, если они содержат конструктивные элементы, не отличающиеся от описанных в дословном тексте формулы, или эквивалентные конструктивные элементы, незначительно отличающиеся от описанных в дословном тексте формулы.
Группа изобретений относится к штанговым насосным установкам и управлению ими. Контроллер предназначен для обеспечения работы штанговой насосной установки при определенной скорости работы насоса. Контроллер содержит процессор, выполненный с возможностью обеспечения работы поршня насоса штанговой насосной установки с первой скоростью. Процессор также выполнен с возможностью определения уровня наполнения насоса для хода его поршня на основании сигнала о положении и сигнала о нагрузке. Кроме того, процессор выполнен с возможностью уменьшения скорости работы насоса до второй скорости на основании уровня наполнения насоса для хода его поршня в преддверии удара по флюиду во время указанного хода поршня и увеличения второй скорости хода поршня насоса до третьей скорости хода поршня насоса во время указанного хода поршня после удара по флюиду. Изобретения направлены на увеличение срока службы компонентов установки и уменьшение времени технического обслуживания и простоя установки. 3 н. и 20 з.п. ф-лы, 8 ил.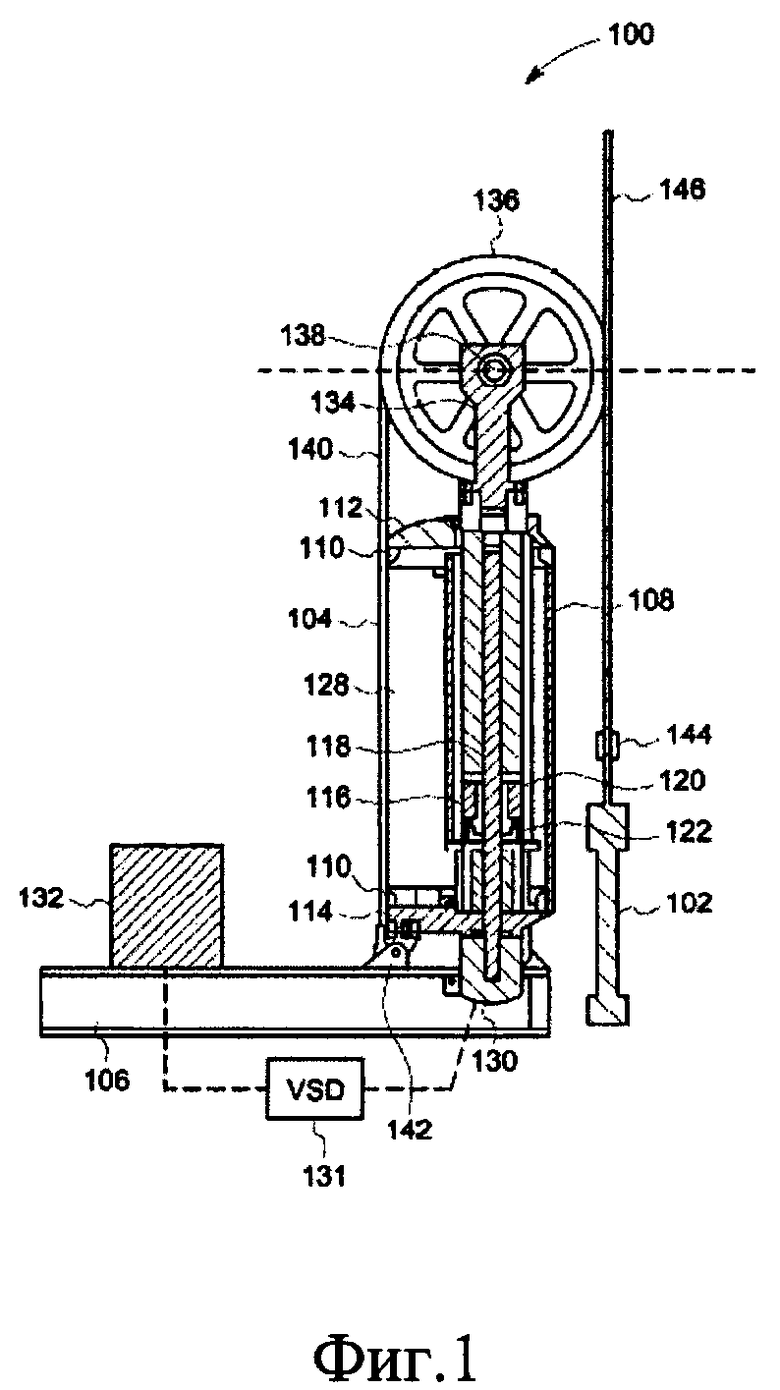
1. Контроллер, предназначенный для обеспечения работы штанговой насосной установки при определенной скорости работы насоса и содержащий процессор, выполненный с возможностью осуществления на протяжении одного хода поршня насоса следующих действий:
обеспечения работы поршня насоса штанговой насосной установки с первой скоростью во время хода поршня насоса,
определения уровня наполнения насоса для указанного хода поршня на основании сигнала о положении и сигнала о нагрузке,
уменьшения указанной первой скорости хода поршня насоса до второй скорости хода поршня насоса на основании уровня наполнения насоса для хода поршня в преддверии удара по флюиду во время указанного хода поршня и
увеличения указанной второй скорости хода поршня насоса до третьей скорости хода поршня насоса во время указанного хода поршня после удара по флюиду.
2. Контроллер по п. 1, в котором процессор выполнен с возможностью расчета диаграммы насоса в режиме реального времени на основании указанных сигнала о положении и сигнала о нагрузке, при этом диаграмма насоса содержит данные о положении поршня насоса в скважине, представленные сигналом о положении, и данные о нагрузке на поршень насоса в скважине, представленные сигналом о нагрузке.
3. Контроллер по п. 1, в котором процессор выполнен с возможностью определения уровня наполнения насоса на основании положения контакта с флюидом во время предыдущего хода поршня насоса.
4. Контроллер по п. 3, в котором процессор выполнен с возможностью определения положения контакта с флюидом на основании положения поршня насоса и нагрузки на поршень насоса для предыдущего хода поршня.
5. Контроллер по п. 1, в котором процессор выполнен с возможностью уменьшения третьей скорости хода поршня насоса до указанной первой скорости во время указанного хода поршня.
6. Контроллер по п. 1, в котором процессор выполнен с возможностью расчета первой скорости хода поршня насоса на основании уровня наполнения насоса.
7. Контроллер по п. 1, в котором процессор выполнен с возможностью расчета в режиме реального времени механических напряжений, действующих на штанговую насосную установку, с использованием модели динамических характеристик штанговой насосной установки и на основании указанных сигнала о положении и сигнала о нагрузке.
8. Контроллер по п. 7, в котором процессор выполнен с возможностью модуляции скорости работы насоса на основании указанных напряжений, вычисленных в режиме реального времени, для регулирования пиковых напряжений, действующих на штанговую насосную установку, и поддержания средней скорости работы насоса на протяжении всего хода его поршня.
9. Способ управления штанговой насосной установкой, включающий
определение положения поршня насоса и нагрузки на поршень насоса,
расчет уровня наполнения насоса на основании указанных положения поршня и нагрузки на поршень,
обеспечение работы штанговой насосной установки при первой скорости,
уменьшение первой скорости работы насоса до второй скорости на основании уровня наполнения насоса и положения поршня насоса в преддверии удара по флюиду и
увеличение второй скорости работы насоса до третьей скорости после удара по флюиду,
причем указанные этапы определения, расчета, обеспечения работы, уменьшения и увеличения скорости выполняют на протяжении одного хода поршня насоса.
10. Способ по п. 9, в котором вторая скорость работы насоса представляет собой заданное значение.
11. Способ по п. 10, в котором третья скорость работы насоса представляет собой заданное значение, обеспечивающее постоянную среднюю скорость работы насоса на протяжении нескольких ходов поршня.
12. Способ по п. 9, в котором вторую скорость работы насоса вычисляют при помощи контроллера в режиме реального времени.
13. Способ по п. 9, в котором третью скорость работы насоса вычисляют при помощи контроллера в режиме реального времени с обеспечением получения постоянной средней скорости на протяжении нескольких ходов поршня.
14. Способ по п. 9, в котором рассчитывают первую скорость на основании уровня наполнения насоса, при этом первая скорость представляет собой целевое среднее число ходов в минуту.
15. Способ по п. 9, в котором при расчете уровня наполнения насоса определяют предыдущее положение поршня насоса, при котором поршень вошел в контакт с поверхностью флюида во время предыдущего хода.
16. Способ по п. 9, в котором в режиме реального времени рассчитывают механические напряжения, действующие на штанговую насосную установку, с использованием модели динамических характеристик штанговой насосной установки и на основании положения поршня и нагрузки на поршень.
17. Способ по п. 16, в котором выполняют модулирование скорости работы насоса на основании указанных напряжений, вычисленных в режиме реального времени, для регулирования пиковых напряжений, действующих на штанговую насосную установку, и поддержания первой скорости на уровне среднего значения.
18. Штанговая насосная установка, содержащая
насос, содержащий поршень и цилиндр, причем поршень насоса выполнен с возможностью работы внутри указанного цилиндра,
штангу, соединенную с двигателем и указанным насосом и выполненную с возможностью обеспечения работы насоса при определенной скорости, и
контроллер, соединенный с указанным двигателем и выполненный с возможностью
обеспечения движения поршня насоса с первой скоростью во время хода вниз,
замедления поршня насоса во время хода вниз так, чтобы скорость работы насоса была равна второй скорости, и
ускорения поршня насоса во время хода вниз после его контакта с поверхностью флюида внутри указанного цилиндра.
19. Штанговая насосная установка по п. 18, содержащая датчик положения и датчик нагрузки, предназначенные для измерения положения указанной штанги, закрепленной в устье скважины для штанговой насосной установки, и действующей на нее нагрузки.
20. Штанговая насосная установка по п. 19, в которой контроллер соединен с указанными датчиком положения и датчиком нагрузки и выполнен с возможностью
расчета в режиме реального времени механических напряжений, действующих на штанговую насосную установку, на основании указанных положения и нагрузки с использованием модели динамических характеристик штанговой насосной установки и
модулирования заданной скорости работы насоса в соответствии с напряжением, определенным в режиме реального времени.
21. Штанговая насосная установка по п. 19, в которой контроллер соединен с указанными датчиком положения и датчиком нагрузки и выполнен с возможностью расчета в режиме реального времени диаграммы насоса, показывающей положение поршня насоса и нагрузку на поршень насоса.
22. Штанговая насосная установка по п. 18, в которой контроллер выполнен с возможностью расчета уровня наполнения насоса на основании предыдущего положения, в котором произошел контакт с поверхностью флюида во время предыдущего хода вниз, при этом уровень наполнения насоса соответствует положению, в котором произойдет контакт с поверхностью флюида при текущем ходе поршня вниз.
23. Штанговая насосная установка по п. 22, в которой контроллер выполнен с возможностью расчета первой скорости на основании уровня наполнения насоса.
| US 2011103974 A1, 05.05.2011 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ СТАНКОМ-КАЧАЛКОЙ | 1997 |
|
RU2165035C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| US 8851860 B1, 07.10.2014 | |||
| WO 1993021442 A1, 28.10.1993 | |||
| Полимерная композиция | 1984 |
|
SU1213043A1 |
| US 6890156 B2, 10.05.2005 | |||
| Высотная ветряная турбина | 1929 |
|
SU15467A1 |

