Изобретение относится к судостроению, а именно к средствам для определения осадки судна в воде. Необходимость определения величины осадки судна возникает при проведении грузовых операций. Способ может быть использован при штиле на спокойной воде и в условиях качки и сильного волнения, при отсутствии грузовых марок по миделю судна, при возникновении сложного перекоса корпуса судна, при большой высоте надводного борта судна и др.
Известен способ определения осадки судна по заявке на пат. РФ №2013140354/11, МПК В63В 39/12, от 02.09.2013. Способ заключается в замерах расстояния от нижней кромки киля судна до поверхности спокойной воды датчиками гидростатического давления как минимум в трех точках, расположенных в носовой, средней и кормовой частях. Все точки замера располагают на дне судна, а расчеты средней осадки производят в автоматическом режиме с помощью контроллера. В качестве измерительной аппаратуры используются гидростатические датчики давления и инклинометры
Недостатком способа является то, что датчики гидростатического давления не дают необходимой точности, результаты их измерения имеют сильную зависимость от температуры, влажности и атмосферного давления, также они не имеют привязки к отсчет ному уровню водной поверхности.
Известен способ по пат. ЕР №0362586, В63В 39/12, опубл. 11.04.90, в котором определение осадки судна производят путем замера высоты надводного борта с помощью устройства, содержащего мерительную линейку, установленную внутри корпуса и имеющую элементы для доступа воды, и обтекатели, прикрепленные к корпусу.
Недостатком известного способа является невысокая точность и надежность измерений в условиях качки из-за того, что измерительное устройство раскачивается вместе с судном на волне, что приводит к изменению глубины погружения мерительной линейки, которое является источником погрешности.
Наиболее близким к заявляемому изобретению является способ определения осадки судна по патенту РФ на №2363611, МПК В63В 39/12, опубл. 10.08.2009. Способ заключается в том, что определение параметров отметок осадки судна осуществляют путем замера высоты подводного борта. Для этого участки наружной обшивки судна в местах пересечения забортной воды и нанесенных марок углублений снимают камерой в режиме реального времени в шести местах. Собранная информация с выводом изображения на монитор, отслеживается в разных скоростных режимах. По выделенному фрагменту определяется параметр отметки осадки судна. После выделения необходимого количества фрагментов и определенных по ним параметров отметок осадки судна информация сохраняется на доступных носителях информации. Устройство, реализующее способ состоит из камеры, ЭВМ (ноутбука/компьютера), соединенных между собой проводной и/или беспроводной связью. При этом устройство может комплектоваться водонепроницаемым прозрачным колпаком для защиты камеры от брызг и атмосферных осадков, а также штативом или телескопическим удлинителем для позиционирования камеры в точке, из которой осуществляется требуемый обзор и съемка.
Недостатком способа является недостаточная точность полученных результатов в неспокойной воде, т.к. колебания волн, в том числе и в местах нанесенных марок углублений хаотичны и с помощью устройства, реализующего способ, не могут быть определены. Кроме того, аналог не обеспечивает оперативного получения информации.
Заявляемый способ определения осадки судна позволяет повысить точность и скорость определения указанного параметра путем замены марок углублений на судне и видеокамеры как средств оценки и документирования полученного результата на геодезическую аппаратуру системы ГЛОНАСС/GPS, решающую ту же задачу быстрее и с более точным конечным результатом.
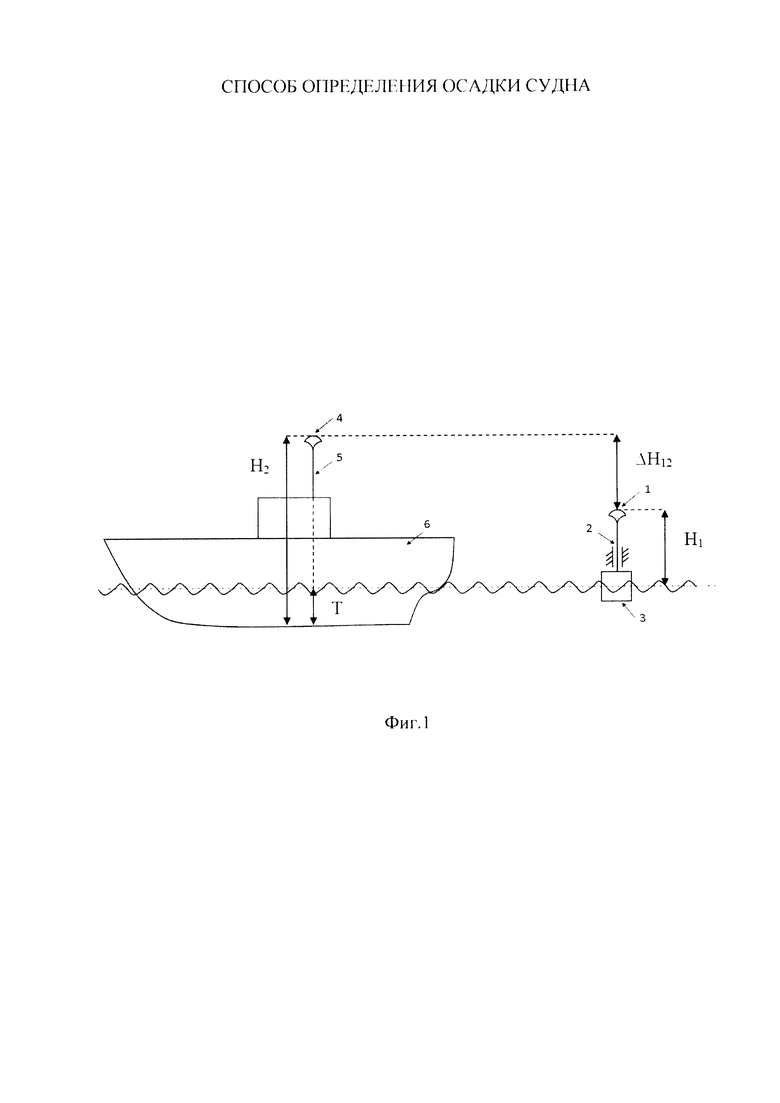
Для решения указанной проблемы используется следующая совокупность существенных признаков: в способе определения осадки судна путем определения высоты подводного борта судна заключающемся также как и прототип, в замерах параметров в нескольких точках судна, отличающемся тем, что замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на палубе судна с возможностью перемещения в горизонтальной плоскости, а антенна второго ровера размещена на плавающем основании в воде, при этом высоту подводного борта судна определяют по формуле: Т=Н2-(Н1+ΔН12), где: Т - высота подводного борта судна; H1 - высота уровня расположения антенны первого ровера относительно уровня воды; Н2 - высота уровня расположения антенны второго ровера относительно киля судна; ΔН12 - разность высот расположения антенны первого ровера относительно антенны второго. При этом полученные результаты поступают, обрабатываются и сохраняются в переносной ЭВМ (ноутбуке/компьютере).
Сущность способа заключается в том, что определение осадки судна производят путем измерения с помощью геодезической аппаратуры ГЛОНАСС/GPS высот приемных антенн судового ровера и ровера, установленного на плавающем основании, и вычисления с помощью переносной ЭВМ искомого параметра в судовой системе координат.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача - повышение точности и оперативности определения осадки судна - решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области судостроения не выявил решений, содержащих отдельные отличительные признаки заявляемого способа, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
Сущность указанного способа поясняется чертежом, где:
на фиг. 1 представлена функциональная схема устройства, реализующего предлагаемый способ.
В качестве измерительной аппаратуры применяется спутниковая геодезическая аппаратура ГЛОНАСС/GPS, антенна первого ровера 1 (базового) которой установлена на мачте 2, закрепленной на плавающем основании 3, а антенна второго ровера 4 (судового), установлена на штативе 5, который по мере производимых замеров может перемещаться вдоль палубы судна 6. Прием произведенных измерений, расчет искомого параметра и хранение результатов осуществляет переносная ЭВМ (на рис. не показана). В зависимости от типа судна и/или требований заказчика может применяться один из двух вариантов комплектов измерительной аппаратуры: двухчастотная спутниковая геодезическая аппаратура ГЛОНАСС/GPS, работающая в режиме кинематики реального времени, с передачей и обработкой данных в ЭВМ (ноутбуке или компьютере) - при нахождении базового ровера на расстоянии не более 20 кмот судна или одночастотная спутниковая геодезическая аппаратура ГЛОНАСС/GPS - при нахождении ровера на расстоянии не более 2 км.
Устройство работает следующим образом:
Оператор включает в работу антенны судового 4 и базового ровера 1 и ЭВМ (ноутбук или компьютер), производит в течение 1 минуты геодезические измерения H1, H2, ΔН12 в режиме кинематики реального времени и собирает данные в компьютере. Далее компьютер в судовой системе координат рассчитывает величину осадки судна (высоты подводного борта) в месте установки ровера 4 по формуле: Т=Н2-(Н1-ΔH12). Затем оператор перемещает антенну ровера 4 в следующую точку палубы судна и повторяет измерения. Операция повторяется для точек судна, расположенных в носовой, средней и кормовой частях палубы судна. По результатам измерения осадки судна методом драфт-сюрвей выполняется расчет массы груза на борту судна.
Предлагаемое изобретение было создано специалистами кафедры «Основ инженерного проектирования» ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала СО. Макарова» в составе научно-исследовательской работы совместно с ООО «ЗД спутниковая навигация», ООО «Фарватер» и ЗАО «НПК «ПРОМЭЛЕКТРОНИКА». Были произведены экспериментальные исследования и расчеты, показавшие возможность использования заявляемого способа для определения осадки судна в порту или при плавании в районах с малыми глубинами.
Способ был апробирован в летний период на спокойной воде. Производилось определение осадки грузового судна типа балкер с известным по массе грузом и без него. При длине судна - 128 м и высоте борта 6,1 м, H1 - 1,5 м, были получены следующие данные для порожнего судна: Н2 - 7,6 м, ΔH12 - 1 м, Т - 5,1 м; для судна под грузом: Н2 - 7,6 м, ΔH12 - 0,5 м, Т - 5,6 м. При сравнении показателей, полученных предлагаемым способом и методом драфт-сюрвей, было выявлено, что предлагаемый способ обладает по сравнению с указанным аналогом большей скоростью, точностью и простотой выполнения: задействован всего один оператор, время проведения до 1 мин, точность измерения - 2 см, что превосходит примерно в 1,5 раза аналогичные показатели метода драфт-сюрвей.
Изложенное, позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ СУДНА | 2021 |
|
RU2761674C1 |
| Способ определения осадки и внешнего состояния корпуса судна | 2019 |
|
RU2729495C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| Способ крепления устройства определения средней осадки судна на корпусе судна | 2021 |
|
RU2788458C2 |
| Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съёмке рельефа дна акватории, и устройство для его осуществления | 2017 |
|
RU2649027C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
Изобретение относится к области судостроения, а именно к средствам для определения осадки судна. Предложен способ определения осадки судна, заключающийся в замерах в нескольких точках судна параметров для определения высоты подводного борта судна, при этом замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на мачте, закрепленной на плавающем основании, а антенна второго ровера (судового) установлена на штативе судна с возможностью перемещения в горизонтальной плоскости, при этом высоту подводного борта судна определяют по формуле Т=Н2-(H1+ΔН12), где Т - высота подводного борта судна; H1 - высота уровня расположения антенны первого ровера относительно уровня воды; H2 - высота уровня расположения антенны второго ровера относительно киля судна; ΔН12 - разность высот расположения антенны второго ровера относительно первого. Предложенный способ позволяет повысить точность и скорость определения осадки судна. 1 з.п. ф-лы, 1 ил.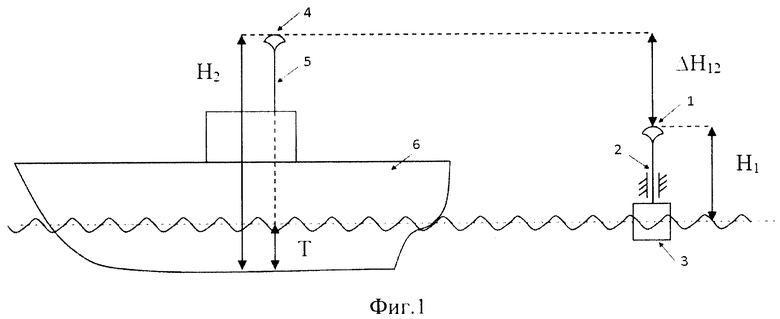
1. Способ определения осадки судна, заключающийся в замерах в нескольких точках судна параметров для определения высоты подводного борта судна, отличающийся тем, что замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на мачте, закрепленной на плавающем основании, а антенна второго ровера (судового) установлена на штативе судна с возможностью перемещения в горизонтальной плоскости, при этом высоту подводного борта судна определяют по формуле Т=Н2-(H1+ΔН12), где Т - высота подводного борта судна; H1 - высота уровня расположения антенны первого ровера относительно уровня воды; H2 - высота уровня расположения антенны второго ровера относительно киля судна; ΔН12 - разность высот расположения антенны второго ровера относительно первой.
2. Способ по п. 1, отличающийся тем, что полученные результаты поступают, обрабатываются и сохраняются в бортовой ЭВМ.
| KR 20150035233 A, 06.04.2015 | |||
| KR 20150024665 A, 09.03.2015 | |||
| KR 20150141840 A, 21.12.2015 | |||
| СПОСОБ АРГУМЕНТИРОВАННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОТМЕТОК ОСАДКИ СУДНА | 2007 |
|
RU2363611C2 |
| JP 2007333530 A, 27.12.2007 | |||
| RU 2013140354 A, 10.03.2015 | |||
| KR 20150062550 A, 08.06.2015 | |||
| RU 2013140356 A, 10.03.2015 | |||
| US 4887361 A, 19.12.1989. | |||

