Изобретение относится к судостроению, а именно к средствам для определения осадки судна в воде. Необходимость определения величины осадки судна возникает при проведении грузовых операций, а также при определении маневренных характеристик судов. Способ может быть использован при штиле на спокойной воде и в условиях качки и сильного волнения, при отсутствии грузовых марок по миделю судна, при возникновении сложного перекоса корпуса судна, при большой высоте надводного борта судна и др.
Известен способ определения осадки судна по заявке на патент RU №2013140354/11, 02.09.2013 [1]. Способ заключается в замерах расстояния от нижней кромки киля судна до поверхности спокойной воды датчиками гидростатического давления как минимум в трех точках, расположенных в носовой, средней и кормовой частях. Все точки замера располагают на дне судна, а расчеты средней осадки производят в автоматическом режиме с помощью контроллера. В качестве измерительной аппаратуры используются гидростатические датчики давления и инклинометры
Недостатком способа является то, что датчики гидростатического давления не дают необходимой точности, результаты их измерения имеют сильную зависимость от температуры, влажности и атмосферного давления, также они не имеют привязки к отсчетному уровню водной поверхности.
Известен способ по патенту ЕР №0362586, 11.04.90 [2], в котором определение осадки судна производят путем замера высоты надводного борта с помощью устройства, содержащего мерительную линейку, установленную внутри корпуса и имеющую элементы для доступа воды, и обтекатели, прикрепленные к корпусу.
Недостатком известного способа является невысокая точность и надежность измерений в условиях качки из-за того, что измерительное устройство раскачивается вместе с судном на волне, что приводит к изменению глубины погружения мерительной линейки, которое является источником погрешности.
Известен также способ определения осадки судна по патенту RU №2363611 С2, 10.08.2009 [3]. Способ заключается в том, что определение параметров отметок осадки судна осуществляют путем замера высоты подводного борта. Для этого участки наружной обшивки судна в местах пересечения забортной воды и нанесенных марок углублений снимают камерой в режиме реального времени в шести местах. Собранная информация с выводом изображения на монитор, отслеживается в разных скоростных режимах. По выделенному фрагменту определяется параметр отметки осадки судна. После выделения необходимого количества фрагментов и определенных по ним параметров отметок осадки судна информация сохраняется на доступных носителях информации. Устройство, реализующее способ состоит из камеры, ЭВМ (ноутбука/компьютера), соединенных между собой проводной и/или беспроводной связью. При этом устройство может комплектоваться водонепроницаемым прозрачным колпаком для защиты камеры от брызг и атмосферных осадков, а также штативом или телескопическим удлинителем для позиционирования камеры в точке, из которой осуществляется требуемый обзор и съемка.
Недостатком способа является недостаточная точность полученных результатов в неспокойной воде, т.к. колебания волн, в том числе и в местах нанесенных марок углублений хаотичны и с помощью устройства, реализующего способ, не могут быть определены.
Кроме того, аналог не обеспечивает оперативного получения информации, как и также известные технические решения (заявки KR №20150035233 А, 06.04.2015 [4], KR №20150024665 А, 09.03.2015 [5], KR №20150141840 А, 21.12.2015 [6], JP №2007333530 А, 27.12.2007 [7], KR №20150062550 А, 08.06.2015 [8], RU №2013140356 А, 10.03.2015 [9], патент US №4887361 А, 19.12.1989 [10]).
Известен также способ определения осадки судна, который позволяет повысить точность и скорость определения указанного параметра путем замены марок углублений на судне и видеокамеры как средств оценки и документирования полученного результата на геодезическую аппаратуру системы ГЛОНАСС/GPS, решающую ту же задачу быстрее и с более точным конечным результатом (патент RU №2680944С1, 28.09.2019 [11]), выбранный в качестве прототипа.
В известном способе определения осадки судна [11], используется следующая совокупность существенных признаков.
Способ определения осадки судна путем определения высоты подводного борта судна заключающемся в замерах параметров в нескольких точках судна, в котором замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на палубе судна с возможностью перемещения в горизонтальной плоскости, а антенна второго ровера размещена на плавающем основании в воде, при этом высоту подводного борта судна определяют по формуле: T=H2-(H1+ΔH12), где: Т - высота подводного борта судна; H1 - высота уровня расположения антенны первого ровера относительно уровня воды; Н2 - высота уровня расположения антенны второго ровера относительно киля судна; ΔН12 - разность высот расположения антенны первого ровера относительно антенны второго. При этом полученные результаты поступают, обрабатываются и сохраняются в переносной ЭВМ (ноутбуке/компьютере).
Сущность способа заключается в том, что определение осадки судна производят путем измерения с помощью геодезической аппаратуры ГЛОНАСС/GPS высот приемных антенн судового ровера и ровера, установленного на плавающем основании, и вычисления с помощью переносной ЭВМ искомого параметра в судовой системе координат.
Для достижения технического результата в известном способе [11], в качестве измерительной аппаратуры применяется спутниковая геодезическая аппаратура ГЛОНАСС/GPS, антенна первого ровера (базового) которой установлена на мачте, закрепленной на плавающем основании, а антенна второго ровера (судового), установлена на штативе, который по мере производимых замеров может перемещаться вдоль палубы судна. Прием произведенных измерений, расчет искомого параметра и хранение результатов осуществляет переносная ЭВМ. В зависимости от типа судна и/или требований заказчика может применяться один из двух вариантов комплектов измерительной аппаратуры: двухчастотная спутниковая геодезическая аппаратура ГЛОНАСС/GPS, работающая в режиме кинематики реального времени, с передачей и обработкой данных в ЭВМ (ноутбуке или компьютере) - при нахождении базового ровера на расстоянии не более 20 кмот судна или одночастотная спутниковая геодезическая аппаратура ГЛОНАСС/GPS - при нахождении ровера на расстоянии не более 2 км.
Устройство работает следующим образом:
Оператор включает в работу антенны судового и базового ровера и ЭВМ (ноутбук или компьютер), производит в течение 1 минуты геодезические измерения H1, Н2, ΔН12 в режиме кинематики реального времени и собирает данные в компьютере. Далее компьютер в судовой системе координат рассчитывает величину осадки судна (высоты подводного борта) в месте установки второго ровера по формуле: T=H2-(H1-ΔН12). Затем оператор перемещает антенну второго ровера в следующую точку палубы судна и повторяет измерения. Операция повторяется для точек судна, расположенных в носовой, средней и кормовой частях палубы судна. По результатам измерения осадки судна методом драфт-сюрвей выполняется расчет массы груза на борту судна.
Недостатком известного способа определения осадки [11] является то, что буксируемое плавающее основание зависит от влияния на него течения, что может вносить дополнительные погрешности в результаты измерений.
Перспективы использования без экипажных надводных судов (БЭНС) ставят проблемы определения маневренных элементов и их использования в задачах навигации и управления при отсутствии судоводителя на борту при изменении условий плавания БЭНС. Наибольшее влияние на результаты управления оказывают поверхностные течения и изменения подводной парусности с изменением осадки БЭНС.
Решаемая при этом задача заключается в компенсации влияния течений на результаты испытаний обычных судов и БЭНС.
Данная задача может быть решена путем использования в районе испытаний дрифтера или вехи с переменной подводной парусностью, характеристики которой будут соответствовать подводной парусности БЭНС, что исключит влияния на результаты испытаний изменчивость скорости течения по площади и по глубине. Для учета перечисленных выше факторов предлагается в период использования БЭНС в районе отпускать в свободное плавание дрифтер или веху с переменной подводной парусностью и контролировать положение и скорость движения дрифтера по радиосигналам ГНСС (ГЛОНАСС+GPS). Для более точного учета воздействия течения -осадку паруса должна быть равной осадке БЭНС.
Дрифтер с переменной подводной парусностью можно использовать при поведении следующих операций:
- определение маневренных характеристик судов различного класса и назначения (Авербах Н.В., Баранов Ю.К. Определение маневренных элементов морского судна и поправки лага. Л.: Морской транспорт, 1962. 74 с, Комаровский Ю.А. Определение относительной скорости судна с помощью приемника СРНС Навстар GPS // М.: Транспортное дело России: специальный выпуск. 2006. №7. С.37-41, Пашенцев СВ. Идентификация некоторых маневренных характеристик судна по результатам натурных испытаний // Вестн. Мурман. гос.ун-та. 2006. Т. 9, №2. С.246-252, Правила определения маневренных элементов кораблей военно-морского флота (ПОМЭК-85). Л.: Главное управление навигации и океанографии Министерства обороны СССР, 1987. 199 с, Резолюция ИМО Стандарты маневренных качеств судов MSC. 137(78). ИМО, 2002., Руководство по определению маневренных характеристик судов внутреннего плавания (для Европейских внутренних водных путей). НД N 2-030101-028. СПб.: Российский морской регистр судоходства, 2010. 28 с, Руководство по определению маневренных характеристик судов. НД N 2-030101-007. СПб.: Российский морской регистр судоходства, 2005. 16 с, Циркуляционное письмо ИМО MSC/Circ.1053
Пояснения к стандартам маневренных качеств судна. ИМО, 5 дек. 2002);
- определение скорости хода от режима работы судовых движителей;
- при поисковых работах.
Задачей предлагаемого технического решения является повышение достоверности при определении осадки судна и расширения функциональных возможностей способа определения осадки судна в части определения скорости хода от режима работы судовых движителей.
Поставленная задача решается за счет того, что в способе определения осадки судна, путем определения высоты подводного борта судна заключающемся в замерах параметров в нескольких точках судна, в котором замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на палубе судна с возможностью перемещения в горизонтальной плоскости, а антенна второго ровера размещена на плавающем основании в воде, при этом высоту подводного борта судна определяют по формуле: T=H2-(H1+ΔH12), где: Т - высота подводного борта судна; H1 - высота уровня расположения антенны второго ровера относительно уровня воды; Н2 - высота уровня расположения антенны первого ровера относительно киля судна; ΔН12 - разность высот расположения антенны первого ровера относительно антенны второго, при этом полученные результаты поступают, обрабатываются и сохраняются в переносной ЭВМ (ноутбуке/компьютере), в котором, в отличие от прототипа [11] плавающее основание выполнено с переменной подводной парусностью, характеристики осадки которого автоматически регулируются в соответствии с изменениями характеристик осадки судна, дополнительно определяют скорость хода судна по формуле VC=Vo+VБ, где VС - скорость судна относительно грунта; Vo - скорость судна относительно воды; VБ - скорость плавающего основания.
Сущность предлагаемого технического решения поясняется чертежом (фигура).
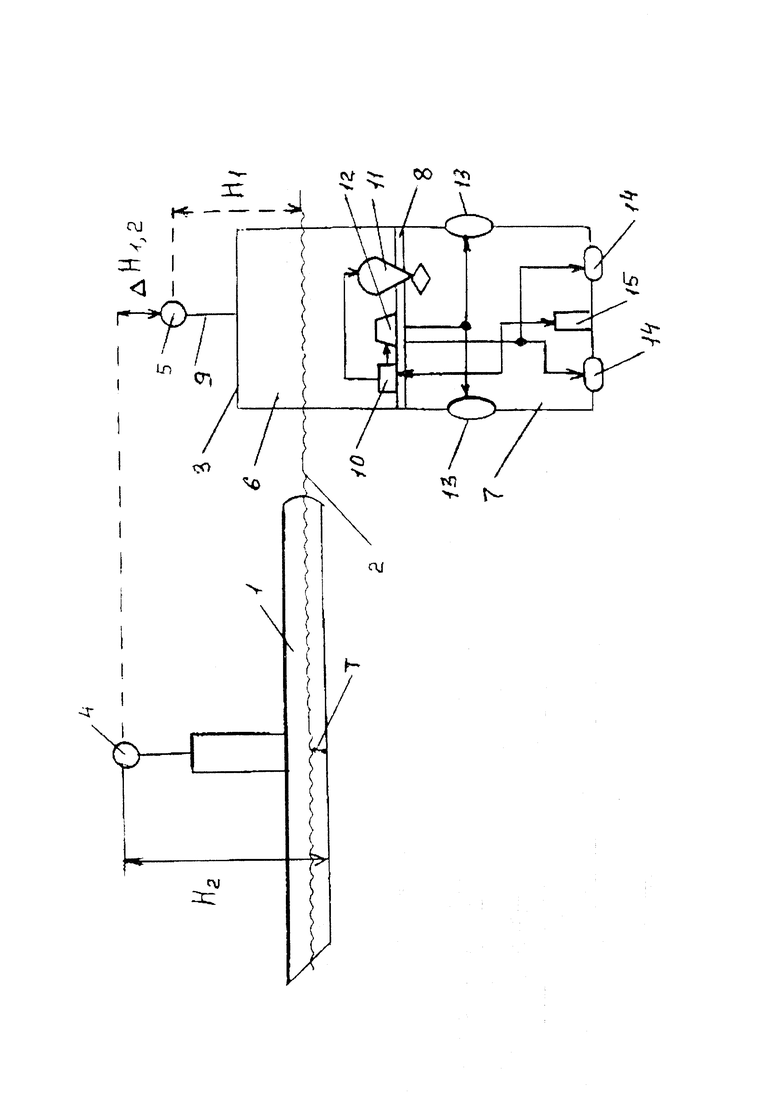
Фигура. Устройство определения осадки судна. На фигуре позициями обозначены: 1 - борт судна, 2 - ватерлиния, 3 - плавающее основание, 4 - антенна первого ровера, которая установлена на палубе судна с возможностью перемещения в горизонтальной плоскости 5 - антенна второго ровера размещена на плавающем основании в воде. Плавающее основание выполнено в виде двух камер 6 (верхняя камера) и 7 (нижняя камера), разделенных перегородкой 8. На верхнем основании корпуса плавающего основания 3, установлена мачта 9, на которой размещена антенна 5 базового ровера. На перегородке 8 в верхней камере 6 размещено устройство управления 10 с картой памяти, баллон 11 высокого давления с управляемым клапаном и разъединительным штуцером, механизм 12 управления клапанами. Нижняя камера 7 снабжена впускными клапанами 13 и выпускными клапанами 14, тензометрическим датчиком 15, который предназначен для учета принимаемой или выпускаемой воды из нижней камеры 7. На фигуре также показаны высота Т - высота подводного борта судна; H1 - высота уровня расположения антенны второго ровера относительно уровня воды; Н2 - высота уровня расположения антенны первого ровера относительно киля судна; ΔH1,2
- разность высот расположения антенны 4 первого ровера относительно антенны 5 второго ровера.
Устройство определения осадки также содержит судовой приемоиндикатор ГНСС ГЛОНАСС и GPS с функцией определения углового положения, штатные судовые измерители скорости, переносную ЭВМ (на фигуре не показаны). Приемоиндикатор ГНСС ГЛОНАСС и GPS применен с функцией определения углового положения, посредством которого определяют курс, крен, дифферент, параметры качки, а также выполняют мониторинг остойчивости судна. Измерительное устройство может быть выполнено в виде малогабаритного моноблока с коротким антенно-фидерным трактом, как в стационарном, так и в переносном вариантах. Минимальная измеряемая высота от 0,3 м, что позволяет использовать измерительное устройство практически для всей номенклатуры надводных судов.
Замеры для определения высоты подводного борта судна могут выполняться как при стоянке судна у стенки, так и при его движении. Функциональные устройства измерительного устройства для определения высоты подводного борта судна могут быть выполнены любым известным образом с использованием любой элементной базы. Принцип работы измерительного устройства заключается в следующем. Как и в прототипе [11] выполняют замеры параметров в нескольких точках судна, в котором замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS. При этом антенна 4 первого ровера, которой установлена на палубе судна с возможностью перемещения в горизонтальной плоскости, а антенна 5 второго ровера размещена на плавающем основании 3 в воде. При этом высоту подводного борта судна определяют по формуле: Т=Н2-(Н1+ΔН12), где: Т - высота подводного борта судна; H1 - высота уровня расположения антенны 5 второго ровера относительно уровня воды; Н2 - высота уровня расположения антенны 4 первого ровера относительно киля судна; ΔН12 - разность высот расположения антенны 4 первого ровера относительно антенны 5 второго ровера. Полученные результаты замеров поступают, обрабатываются и сохраняются в переносной ЭВМ (ноутбуке/компьютере).
В отличие от прототипа замеры высоты подводного борта выполняют с учетом изменения осадки судна. Для этого плавающее основание 3 выполнено с переменной подводной парусностью, характеристики осадки которого автоматически регулируются в соответствии с изменениями характеристик осадки судна. При этом первоначально выполняют замеры осадки судна в его порожнем состоянии, а также синхронно с замерами осадки судна выполняют замеры осадки плавающего основания 3. Далее при каждом изменении осадки по мере его загрузки с судна поступает сигнал на устройство управления 10 с картой памяти. Посредством баллона 11 высокого давления с управляемым клапаном и разъединительным штуцером, механизма 12 управления клапанами, а также впускными клапанами 13 и выпускными клапанами 14 и тензометрическим датчиком 15, который предназначен для учета принимаемой или выпускаемой воды из нижней камеры 7 регулируется прием или выпуск необходимого объема забортной воды для выравнивания осадки плавающего основания 3, соответствующей осадке судна на моменты измерений. Дополнительно определяют скорость хода судна по формуле VC=Vo+VБ, где VC - скорость судна относительно грунта; Vo - скорость судна относительно воды; VБ - скорость плавающего основания.
Скорость судна определяют по данным, получаемым от штатных судовых измерителей скорости. Скорость плавающего основания и контроль его положения определяют посредством судового приемоиндикатора ГНСС по радиосигналам ГНСС (ГЛОНАСС+GPS).
По результатам замеров в вычислителе или в судовой ЭВМ определяется осадка судна, по полученным значениям которой методом драфт-сюрвей может быть выполнен расчет массы груза на борту судна.
Также в вычислителе решается задача определения маневренных элементов и их использования в задачах навигации и управления при отсутствии судоводителя на борту при изменении условий плавания БЭНС.
Наибольшее влияние на результаты управления оказывают поверхностные течения и изменения подводной парусности с изменением осадки БЭНС.
Предлагаемое техническое решение позволяет компенсировать влияние течений на результаты испытаний БЭНС, путем использования в районе испытаний дрифтера (плавающего основания) с переменной подводной парусностью, характеристики которой будут соответствовать подводной парусности БЭНС, что исключит влияния на результаты испытаний изменчивость скорости течения по площади и по глубине. Технический результат заявленного изобретения заключается в измерении параметров эквивалентного морского течения, воздействующего как на буй, так и на БЭНС.
Технический результат достигается тем, что эквивалентность воздействия течения на БЭНС и на буй достигается переменной подводной парусностью буя.
Функциональные устройства измерительного устройства для определения высоты подводного борта судна могут быть выполнены любым известным образом с использованием любой элементной базы.
Источники информации.
1. Заявка на патент RU №2013140354/11, 02.09.2013.
2. Патент ЕР №0362586, В63В 39/12, 11.04.90.
3. Патент RU №2363611 С2, 10.08.2009.
4. Заявка KR №20150035233 А, 06.04.2015.
5. Заявка KR №20150024665 А, 09.03.2015.
6. Заявка KR №20150141840 А, 21.12.2015.
7. Заявка JP №2007333530 А, 27.12.2007.
8. Заявка KR №20150062550 А, 08.06.2015.
9. Заявка RU №2013140356 А, 10.03.2015.
10. Патент US №4887361 А, 19.12.1989.
11. Патент RU №2680944 С1, 28.09.2019.
Изобретение относится к области судостроения, а именно к средствам для определения осадки судна. Предложен способ определения осадки судна путем определения высоты подводного борта судна, заключающийся в замерах параметров в нескольких точках судна, в котором замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на палубе судна с возможностью перемещения в горизонтальной плоскости, а антенна второго ровера размещена на плавающем основании в воде, при этом высоту подводного борта судна определяют по формуле T=H2-(H1+ΔH12), где Т - высота подводного борта судна; H1 - высота уровня расположения антенны второго ровера относительно уровня воды; Н2 - высота уровня расположения антенны первого ровера относительно киля судна; ΔН12 - разность высот расположения антенны первого ровера относительно антенны второго, при этом полученные результаты поступают, обрабатываются и сохраняются в переносной ЭВМ (ноутбуке/компьютере), причем плавающее основание выполнено с переменной подводной парусностью, характеристики осадки которого автоматически регулируются в соответствии с изменениями характеристик осадки судна, дополнительно определяют скорость хода судна по формуле VC=Vo+VБ, где VC -скорость судна относительно грунта; Vo - скорость судна относительно воды; VБ - скорость плавающего основания. Техническим результатом является повышение достоверности при определении осадки судна и расширение функциональных возможностей способа определения осадки судна. 1 ил.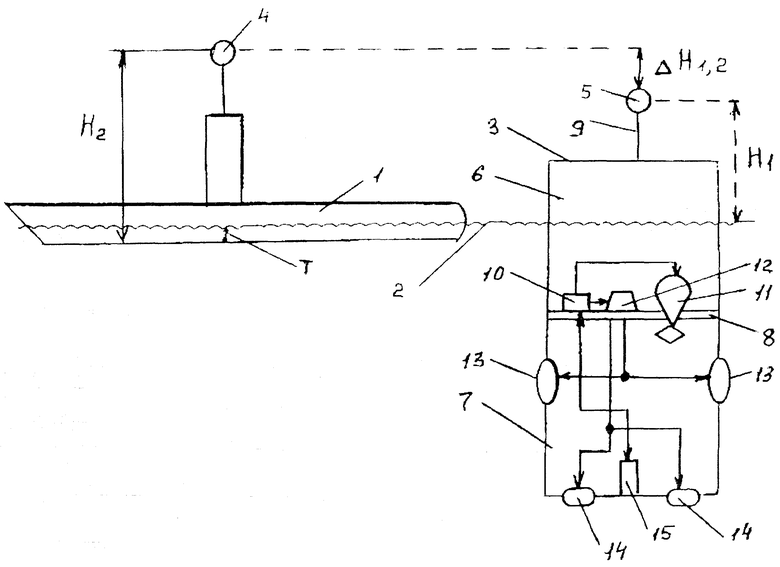
Способ определения осадки судна путем определения высоты подводного борта судна, заключающийся в замерах параметров в нескольких точках судна, в котором замеры осуществляют с помощью геодезической аппаратуры ГЛОНАСС/GPS, антенна первого ровера которой установлена на палубе судна с возможностью перемещения в горизонтальной плоскости, а антенна второго ровера размещена на плавающем основании в воде, при этом высоту подводного борта судна определяют по формуле Т=Н2-(Н1+ΔН12), где Т - высота подводного борта судна; H1 - высота уровня расположения антенны второго ровера относительно уровня воды; Н2 - высота уровня расположения антенны первого ровера относительно киля судна; ΔН12 - разность высот расположения антенны первого ровера относительно антенны второго, при этом полученные результаты поступают, обрабатываются и сохраняются в переносной ЭВМ, отличающийся тем, что плавающее основание выполнено с переменной подводной парусностью, характеристики осадки которого автоматически регулируются в соответствии с изменениями характеристик осадки судна, дополнительно определяют скорость хода судна по формуле VC=Vo+VБ, где VС - скорость судна относительно грунта; Vo - скорость судна относительно воды; VБ - скорость плавающего основания.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ СУДНА | 2018 |
|
RU2680944C1 |
| KR 20150035233 A, 06.04.2015 | |||
| KR 20150024665 A, 09.03.2015 | |||
| KR 20150141840 A, 21.12.2015 | |||
| СПОСОБ АРГУМЕНТИРОВАННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОТМЕТОК ОСАДКИ СУДНА | 2007 |
|
RU2363611C2 |
| JP 2007333530 A, 27.12.2007. | |||

