Область техники
Изобретение относится к области медицинской техники, в частности к ортопедическим средствам, и может быть использовано для лечения вялого пареза стопы вследствие поражения малоберцового нерва или малоберцовой порции седалищного нерва.
Уровень техники
Наиболее близким техническим решением (прототип) является устройство Foot Drop System XFT-2001 (информация о котором размещена, например, на следующем электронном ресурсе: http://verusmed.ru/files/XFT-2001%20Russian%20Manual.pdf, дата обращения 11.08.2016). Данное устройство относится к области медицинской техники, а именно к ортопедическим средствам. Устройство может быть использовано при нарушениях центральной нервной системы, которые приводят к нарушениям моторно-двигательного аппарата, в частности таким как "свисающая стопа". Данное устройство помогает исправить походку, нарушенную синдромом "свисающей стопы". Принцип работы устройства основан на стимуляции нервов, отвечающих за работу необходимых мышц. Устройство состоит из манжеты, блока управления, датчика стопы и электродов. При этом блок управления и электроды размещены на манжете, а датчик стопы выполнен в виде стельки. Датчик стопы реагирует на давление, создаваемое пяткой на подошву обуви при ходьбе. Исправление походки происходит за счет того, что устройство посылает электрические импульсы малоберцовому нерву, который управляет сокращением мышц нижней части ноги, обеспечивая правильное положение стопы и ноги в целом при ходьбе.
Недостатком известного технического решения является недостаточная безопасность при использовании такого устройства. Данный недостаток вызван тем, что датчик стопы, расположенный в стельке, может срабатывать некорректно при ходьбе по неровностям. Давление, оказываемое на датчик, может оказаться слишком большим или, наоборот, слишком малым, что, в свою очередь, будет вызывать потерю синхронности движения ног при ходьбе. Такие последствия могут быть травмоопасными. Кроме этого, присутствие на опорной подошвенной поверхности стопы дополнительного предмета может вызывать травму подошвенного апоневроза и провоцировать боли при ходьбе.
Техническим результатом предлагаемого изобретения является повышение безопасности использования за счет правильного расположения ступни при ходьбе и более корректного определения шага, а также возможности отслеживать силу мышечных сокращений и, при необходимости, регулировать их во время ходьбы.
Указанный технический результат достигается за счет того, что в ортезе для лечения пареза стопы, содержащем фиксатор для голени, корпус, блок управления, блок сравнения, блок памяти, блок питания, генератор импульсов, стимулирующие электроды, миографические датчики, а также датчик шага для размещения на руке, при этом фиксатор для голени выполнен по форме таким, чтобы иметь возможность плотно облегать голень и фиксировать прямой угол наклона стопы относительно голени, причем фиксатор для голени выполнен из эластичного материала, при этом корпус, стимулирующие электроды и миографические датчики закреплены на фиксаторе для голени, а блок управления, блок сравнения, блок памяти, блок питания и генератор импульсов размещены в корпусе, причем блок управления соединен с блоком сравнения, генератором импульсов и датчиком шага, при этом блок сравнения соединен с блоком памяти и миографическими датчиками, а генератор импульсов соединен со стимулирующими электродами, блок питания выполнен и соединен с обеспечением работоспособности по крайней мере блока управления, блока сравнения и генератора импульсов, в частном случае датчик шага соединен с блоком управления посредством беспроводной связи.
Краткое описание чертежей
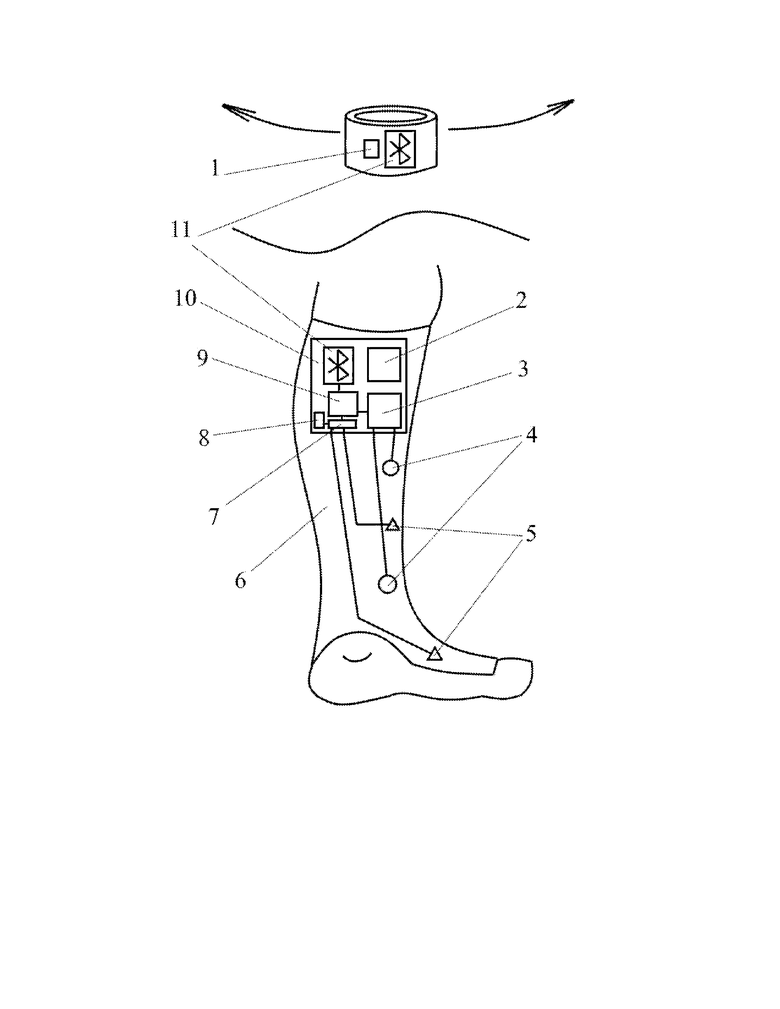
Изобретение поясняется чертежом, на котором изображена схема устройства с его основными элементами.
Раскрытие изобретения
На чертеже обозначены: датчик шага 1, блок питания 2, генератор импульсов 3, стимулирующий электрод 4, миографический датчик 5, фиксатор для голени 6 (далее - фиксатор), блок сравнения 7, блок памяти 8, блок управления 9, корпус 10 и модуль связи 11.
Ортез как ортопедическое устройство представляет собой наружное устройство, используемое для изменения структурных и функциональных характеристик нервно-мышечной и скелетной систем (определение в соответствии с ГОСТ Р ИСО 8549-1-2011).
Элементами данного ортеза для лечения пареза стопы являются фиксатор 6 (для голени), корпус 10, внутри которого расположены генератор импульсов 3, блок управления 9, блок сравнения 7, блок памяти 6, блок питания 2, находящиеся вне корпуса стимулирующие электроды 4, миографические датчики 5 и датчик шага 1, а также модули связи 11.
Фиксатор 6 представляет собой изделие, выполненное по форме таким, чтобы иметь возможность плотно облегать голень и фиксировать прямой угол наклона стопы относительно голени. При этом фиксатор 6 имеет внутреннюю поверхность, прилегающую к ноге при стандартном использовании устройства, и наружную поверхность. Фиксатор 6 выполняют из достаточно эластичного материала, чтобы обеспечивать возможность небольшого поворота (тыльного сгибания) стопы. Фиксатор 6 может быть выполнен, например, из синтетической ткани или другого подходящего материала.
На фиксаторе 6 (например, на наружной поверхности) расположен корпус 10 с установленными внутри элементами устройства. Корпус 10 выполнен, по возможности, компактным и обеспечивающим удобную эксплуатацию изделия. Обычно корпус 10 расположен вблизи верхней части фиксатора 6, то есть вблизи колена носителя.
Генератор импульсов 3 выполнен с возможностью создавать электрические импульсы различной амплитуды, частоты и продолжительности. Генератор импульсов 3 имеет, например, два выхода, предназначенные для соединения со стимулирующими электродами 4. Также генератор импульсов 3 снабжен входом, посредством которого он соединен с блоком управления 9.
Стимулирующие электроды 4 расположены на внутренней поверхности фиксатора 6 с обеспечением возможности, при стандартном использовании изделия, находиться в зоне проекции малоберцового нерва на внутреннюю поверхность фиксатора 6. Каждый стимулирующий электрод 4 соединен с соответствующим выходом генератора импульсов 3. Стимулирующие электроды 4 могут быть выполнены, например, из токопроводящей резины с обеспечением возможности воздействовать электрическими импульсами на малоберцовый нерв.
Блок управления 9, соединенный с генератором импульсов 3, выполнен с обеспечением возможности корректировать работу генератора импульсов 3, то есть обеспечивать необходимые значения амплитуды, частоты и продолжительности импульсов. Также блок управления 9 соединен с блоком сравнения 7 и датчиком шага 1. При этом блок управления 9 выполнен с обеспечением возможности воспринимать сигналы от блока сравнения 7 и датчика шага 1. Соединение с датчиком шага 1, в частном случае, может быть выполнено беспроводным посредством модулей связи 11.
Блок памяти 8 выполнен с обеспечением возможности сохранения соответствующих значений силы тока, электрических потенциалов, являющихся ориентирами для изменения управляющих воздействий. Блок памяти 8 выполнен перезаписываемым.
Блок сравнения 7 имеет несколько входов, соединенных с миографическими датчиками 5, а также вход, соединенный с блоком памяти 8. При этом блок сравнения 7 выполнен с обеспечением возможности принимать сигналы от миографических датчиков 5 и блока памяти 8, а также сравнивать их между собой.
Миографические датчики 5 расположены на внутренней поверхности фиксатора 6 и прилегают, по крайней мере один, к тыльной части стопы и, по крайней мере один, к наружной поверхности голени. Миографические датчики 5 выполнены с обеспечением возможности снимать значения силы токов, возникающих в мышечных тканях при их сокращении.
Блок питания 2 расположен в корпусе 10 вместе с генератором импульсов 3, блоком управления 9, блоком сравнения 7 и блоком памяти 8 и обеспечивает электропитание данных элементов.
Датчик шага 1 представляет собой элемент, позволяющий распознать шаг его носителя. Датчик шага 1 соединен с блоком управления 9. Датчик шага 1 может быть выполнен, например, на основе акселерометра. В частном случае датчик шага 1 выполнен с обеспечением возможности распознавать взмах руки при ходьбе и передавать соответствующий сигнал блоку управления 9. Обычно датчик шага 1 расположен на отдельном от фиксатора 6 элементе устройства, например на специальном браслете. В таком случае соединение датчика шага 1 и блока управления 9 осуществляется посредством двух модулей связи 11, один из которых расположен в корпусе 10 и соединен с блоком управления 9, а другой расположен на браслете и соединен с датчиком шага 1. В качестве модуля связи 11 может быть использован Bluetooth-модуль.
Осуществление изобретения
В случае использования указанных выше элементов и средств изобретение реализуется следующим образом.
Устройство используют для восстановления опорно-двигательных функций голени и стопы. Стимулирование малоберцового и других нервов поврежденной ноги может способствовать лечению пареза стопы и других дефектов, связанных с неправильным функционированием нервной системы.
Пользователь, страдающий парезом стопы или другими расстройствами, связанными с поражением малоберцового нерва или малоберцовой порции седалищного нерва, надевает на голень фиксатор 6 с установленными на нем корпусом 10, стимулирующими электродами 4 и миографическими датчиками 5. Также пользователь надевает браслет или аналогичный элемент с датчиком шага 1.
Обычно люди, страдающие парезом стопы, имеют трудности, связанные с ходьбой. Это обусловлено тем, что нервы стопы пораженной ноги не получают сигналы от центральной нервной системы. При этом стопа при ходьбе оказывается в неправильном положении. Помимо затруднений при ходьбе, такая проблема может приводить к травмам. Устройство позволяет восстанавливать правильное положение стопы при ходьбе, что необходимо людям, страдающим парезом стопы. Также устройство позволяет стимулировать необходимые нервы для восстановления правильной мышечной работы во время ходьбы.
Пользователь включает устройство. Датчик шага 1, размещенный на браслете, реагирует на взмах руки при ходьбе, передает сигнал блоку управления 9. Блок управления 9, получая сигналы от датчика шага 1, корректирует работу генератора импульсов 3, который через стимулирующие электроды 4 оказывает воздействие на необходимые нервы. Оказанное воздействие на нервы провоцирует сокращение мышц, что приводит к необходимому расположению стопы и голени пораженной ноги в процессе ходьбы. Таким образом, пользователь совершает шаг пораженной парезом стопы ногой. Датчик шага 1 синхронизирован с работой генератора импульсов 3 с помощью блока управления 9 таким образом, чтобы обеспечить корректную работу обеих ног при ходьбе. Таким образом, взмах руки, на который реагирует датчик шага 1, является сигналом для устройства. Для исключения некорректной работы устройства пользователь, осведомленный о данной особенности, может влиять на работу устройства (а также на работу мышц пораженной ноги) движениями руки, на которой имеется датчик шага 1.
Помимо этого, при ходьбе работают миографические датчики 5, которые снимают значения биопотенциалов мышечных сокращений, которые могут быть оценены по величине силы тока, возникающего в мышечных тканях. По показаниям биопотенциалов мышечных сокращений можно судить о том, насколько сильно сокращаются мышцы. Миографические датчики 5 введены в устройство для того, чтобы контролировать силу работы мышц и, при необходимости, корректировать ее. Контроль происходит путем определения отклонения фиксируемого значения силы тока миографическим датчиком 5 от значения, заложенного в блоке памяти 8. Причем значение силы тока, заложенное в блоке памяти 8, сравнимо со значениями силы токов, которые возникают в мышечных тканях при их сокращении. Более того, данное значение согласуют с врачом для того, чтобы оно соответствовало оптимальной работе мышц. В зависимости от того, какое из значений оказывается больше, а также от величины отклонения блок управления 9 устанавливает необходимый режим дальнейшей работы генератора импульсов 3. Например, при возникновении биопотенциалов мышечных сокращений, превышающих оптимальное значение для ходьбы, блок управления 9 будет задавать меньшую амплитуду генерируемых импульсов. Наоборот, при недостаточном для нормальной ходьбы биопотенциале мышечных сокращений блок управления 9 задаст большую амплитуду импульсов для стимуляции мышц.
Также возможен вариант работы устройства (вспомогательный) без использования датчика шага 1. В этом случае блок управления 9 будет работать согласно программе, отлаженной для ходьбы конкретного пользователя. Наладка блока управления 9 для данного варианта работы устройства выполняется под руководством врача. В данном случае устройство будет работать с момента включения и до момента выключения в одном частотном режиме импульсов, который заложен в блок управления 9 и который выбран согласно физиологическим особенностям конкретного пользователя. Миографические датчики 5 также могут работать и в данном режиме, способствуя корректировке амплитуды импульсов, подаваемых на необходимые нервы.
Еще одним вариантом вспомогательного использования устройства может быть простая стимуляция необходимых нервов без осуществления ходьбы. Данный вариант работы применяется исключительно в лечебно-реабилитационных целях. Для реализации данного варианта работы также осуществляется необходимая наладка блока управления 9, например, включением необходимой программы.
Таким образом, выполнение устройства описанным выше образом обеспечивает повышение безопасности использования за счет правильного расположения ступни при ходьбе и более корректного определения шага, а также возможности отслеживать силу мышечных сокращений и, при необходимости, регулировать их во время ходьбы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2126276C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЛОСКО-ВАЛЬГУСНОЙ УСТАНОВКИ СТОП И ПРОДОЛЬНОГО ПЛОСКОСТОПИЯ У ДЕТЕЙ | 2017 |
|
RU2645404C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ, ТРАВМ ПЕРИФЕРИЧЕСКОЙ НЕРВНОЙ СИСТЕМЫ, ИХ ПОСЛЕДСТВИЙ И ПОСЛЕДСТВИЙ НАРУШЕНИЯ СПИНАЛЬНОГО МОЗГОВОГО КРОВООБРАЩЕНИЯ И СПИНАЛЬНЫХ ТРАВМ | 2006 |
|
RU2344805C2 |
| СПОСОБ КОРРЕКЦИИ ДВИЖЕНИЙ ПРИ ХОДЬБЕ В РАЗНОМ ТЕМПЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2082452C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПОСЛЕ ТРАВМ И ПОРАЖЕНИЙ ГРУДНОГО И ПОЯСНИЧНОГО ОТДЕЛОВ ПОЗВОНОЧНИКА | 2017 |
|
RU2650210C1 |
| СПОСОБ МНОГОКАНАЛЬНОЙ ЭЛЕКТРОНЕЙРОМИОСТИМУЛЯЦИИ У БОЛЬНЫХ ПОЯСНИЧНЫМ ОСТЕОХОНДРОЗОМ ПОСЛЕ ПРОТЕЗИРОВАНИЯ МЕЖПОЗВОНКОВЫХ ДИСКОВ | 2004 |
|
RU2265460C2 |
| Способ двухуровневой электростимуляции центральных и периферических нервных структур при закрытых повреждениях нервов верхних и нижних конечностей | 2022 |
|
RU2796185C1 |
| СПОСОБ ЛЕЧЕНИЯ ПАРЕЗОВ И ПАРАЛИЧЕЙ | 2010 |
|
RU2445990C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
Изобретение относится к медицине. Ортез для лечения пареза стопы содержит фиксатор для голени, корпус, блок управления, блок сравнения, блок памяти, блок питания, генератор импульсов, стимулирующие электроды, миографические датчики, а также датчик шага для размещения на руке. Фиксатор для голени выполнен по форме таким, чтобы иметь возможность плотно облегать голень и фиксировать прямой угол наклона стопы относительно голени, причем фиксатор для голени выполнен из эластичного материала. Корпус, стимулирующие электроды и миографические датчики закреплены на фиксаторе для голени, а блок управления, блок сравнения, блок памяти, блок питания и генератор импульсов размещены в корпусе. Блок управления соединен с блоком сравнения, генератором импульсов и датчиком шага, при этом блок сравнения соединен с блоком памяти и миографическими датчиками, а генератор импульсов соединен со стимулирующими электродами. Блок питания выполнен и соединен с обеспечением работоспособности по крайней мере блока управления, блока сравнения и генератора импульсов. Изобретение обеспечивает повышение безопасности за счет правильного расположения ступни при ходьбе и более корректного определения шага, а также обеспечивает возможность отслеживать силу мышечных сокращений и, при необходимости, регулировать их во время ходьбы. 1 з.п. ф-лы, 1 ил.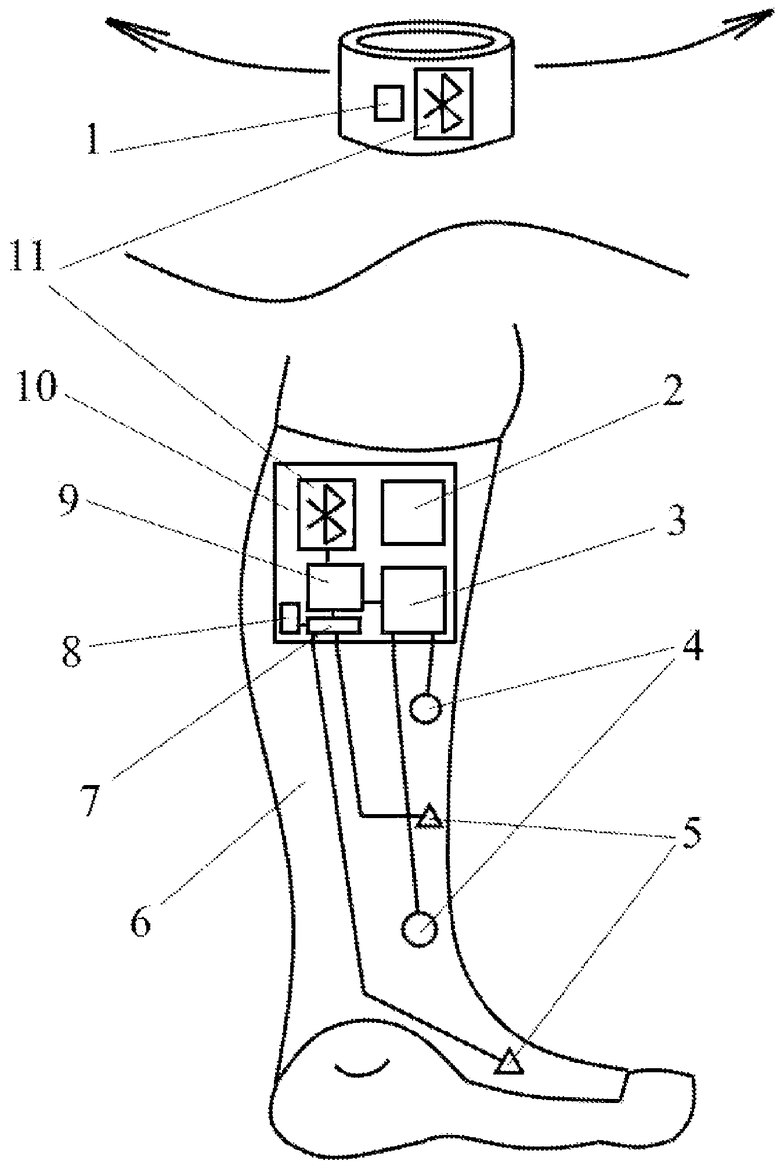
1. Ортез для лечения пареза стопы, содержащий фиксатор для голени, корпус, блок управления, блок сравнения, блок памяти, блок питания, генератор импульсов, стимулирующие электроды, миографические датчики, а также датчик шага для размещения на руке, при этом фиксатор для голени выполнен по форме таким, чтобы иметь возможность плотно облегать голень и фиксировать прямой угол наклона стопы относительно голени, причем фиксатор для голени выполнен из эластичного материала, при этом корпус, стимулирующие электроды и миографические датчики закреплены на фиксаторе для голени, а блок управления, блок сравнения, блок памяти, блок питания и генератор импульсов размещены в корпусе, причем блок управления соединен с блоком сравнения, генератором импульсов и датчиком шага, при этом блок сравнения соединен с блоком памяти и миографическими датчиками, а генератор импульсов соединен со стимулирующими электродами, блок питания выполнен и соединен с обеспечением работоспособности по крайней мере блока управления, блока сравнения и генератора импульсов.
2. Ортез по п. 1, отличающийся тем, что датчик шага соединен с блоком управления посредством беспроводной связи.
| US 20150265834 A1, 24.09.2015 | |||
| Выносная пресс-форма для изготовления изделий из термореактивных пластмасс на автоматической линии | 1960 |
|
SU148216A1 |
| WO 2004078255 A1, 16.09.2004 | |||
| US 0005121747 A1, 16.06.1992 | |||
| US 0008529484 B2, 10.09.2013 | |||
| US 0009272139 B2, 01.03.2016. | |||

