Изобретение относится к медицинской технике, а именно к техническим средствам реабилитации - протезно-ортопедическим изделиям, а точнее к ортопедическим аппаратам на нижнюю конечность.
Функции нижней конечности и, в первую очередь, двигательные, относительно тазобедренного сустава, обеспечивающие вынос конечности в сагиттальной плоскости, в том числе в сочетании с поражением позвоночника в поясничном и нижнегрудном отделах, могут быть ослаблены в результате целого ряда заболеваний и деформаций. К ним относятся такие, как:
- спина Бифида;
- спинно-мозговая грыжа;
- последствия травм поясничного отдела позвоночника средней легкой степени;
- спинальные атрофии Верднига-Гофмана и Дубровица;
- синдром Луи-Бара;
- некоторые формы атаксий;
- миопатии;
- состояния после восстановительных операций на нижних конечностях, в том числе сочетающиеся с поражениями позвоночника, например, со сколиозом различной этиологии.
Кроме того, сходные ортопедические патологии нижних конечностей могут быть вызваны рядом неврологических заболеваний, среди которых:
- миоплазии;
- специальные дисплазии;
- полиневропатии;
- миелиты различной этиологии;
- полиомиелит;
- нейротические амиотрофии и некоторые другие.
При этих заболеваниях, деформациях в опорно-двигательной системе на уровне нижних конечностей и дистальных отделов туловища возникают различные по степени проявления парезы, параличи, образуется дефицит мышечных сил способных осуществлять локомоции, в частности, ходьбу. Появляются патологические установки, контрактуры, нарушается тонус мышц, возникает тугоподвижность, нарушается вся схема построения конечности свойственная норме. Эти проявления возникают также и как вторичные деформации при отсутствии должного воздействия и проведения комплексных реабилитационных мероприятий.
Одновременно, наряду с медицинскими показателями нарушается целый ряд биомеханических характеристик нижних конечностей, таких как:
- масс-инерционных характеристик сегментов нижних конечностей и туловища;
- упругих характеристик в сегментах и относительно суставов конечности;
- изменение амплитуд движений в суставах;
- изменение расположения осей суставов в проекции на сагиттальную плоскость во время стояния и ходьбы;
- изменение величины моментов сил относительно суставов.
Восполнить нарушенные функции при относительно легких или средней степени тяжести случаях, если поражена одна из нижних конечностей, а также имеются поражения позвоночника, возможно за счет использования аппаратов ортопедических выполняемых в соответствии с их определением (ГОСТ Р 58268), в виде внешних приспособлений для изменения структурных и функциональных характеристик нервно-мышечной и скелетной системы: разгрузки, фиксации, коррекции и активизации движений.
Известен аппарат ортопедический, состоящий из корпуса, выполненного в виде несущих звеньев туловища, бедра, голени и стопы, представляющих собой гильзы корсета бедра голени и стопы с шинами, соединенными между собой тазобедренным, коленными и голеностопными узлами с шарнирными осями, при этом в гильзе стопы имеется упругий элемент [1].
Известный аппарат ортопедический в некоторой степени позволяет осуществлять функции разгрузки, фиксации и ортопедической коррекции пораженной конечности и позвоночника, а также позволяет обеспечивать передвижение в нем больного, но только при наличии достаточно функциональных мышц в области тазобедренного сустава. При дефиците и значительном ослаблении мышц тазобедренного пояса движения в нем весьма затруднены из-за отсутствия активных двигательных встроенных устройств. Кроме того, в известном аппарате ортопедическом не соблюдается рациональная схема построения, не совпадают центры масс звеньев со среднестатистическими центрами масс при ходьбе в норме, что отрицательно влияет на масс-инерционные характеристики, нарушает рациональность маятникообразных движений звеньев конечности в период переноса. Кроме того, в области тазобедренного узла отсутствуют упругие элементы, которые позволяют накапливать потенциальную энергию в фазе опоры при разгибании в тазобедренном суставе и отдавать ее в фазу заднего толчка при начале периода переноса конечности, обеспечивая рекуперацию.
В особо тяжелых случаях в последние годы для обеспечения активизации функций движений стали применяться дорогостоящие, сложные в эксплуатации такие внешние приспособления, как медицинские экзоскелетоны имеющие микропроцессорное управление (термин «экзоскелетон» или «экзоскелет» не гостирован в России в отличие от термина аппарат ортопедический) - аппараты ортопедические с микропроцессорным управлением, но устранять функциональные нарушения в относительно легких или средней степени тяжести случаях, особенно если поражена одна из нижних конечностей, с помощью экзоскелетонов не представляется целесообразным, как с медицинской, биомеханической точек зрения, так и с экономической из-за их высокой стоимости. При использовании экзоскелетов - аппаратов ортопедических с микропроцессорным управлением не в достаточной мере обеспечиваются биомеханические характеристики - кинематика ходьбы и схема построения, отсутствуют инерционные и упругие составляющие, нарушается стереотип ходьбы, кроме того отсутствует предотвращение вторичных деформаций, присутствует нерациональность нагрузки сегментов конечностей со стороны креплений экзоскелетов. Остаточные возможности опорно-двигательной системы больного не используются. Их принудительно заменяют механизмом и тем самым приводят к окончательной атрофии. Их конструкции изготавливаются осредненными и не в должной мере индивидуализированными, а также не приспособленными для ортопедической коррекции не только нижней конечности, но и позвоночника в случае его поражения.
Известен аппарат ортопедический с микропроцессорным управлением (АОМУ), состоящий из корпуса, исполнительных механизмов, блока управления, источников питания, несущих звеньев туловища, бедра, голени и стопы, тазобедренных коленных голеностопных шарнирных узлов с осями, элементов креплений [2].
Известный АОМУ позволяет перемещать больного с поражениями опорно-двигательной системы в вертикальном положении, обеспечивая при этом движения его нижних конечностей.
Однако известный АОМУ имеет большие габариты и массу, недостаточно устойчив, что следует из наличия на задней стороне корпуса дополнительных рукояток для сопровождающего, а самому больному рекомендуется использовать при передвижении дополнительные опоры, например, в виде тростей с подлокотниками, что исключает его применение у больных имеющих поражения верхних конечностей. Известный АОМУ предназначен для перемещения только по ровной горизонтальной поверхности лишь в соответствии с определенными программами, что даже в условиях стационара реабилитационных учреждений не гарантирует учет в программах всего разнообразия встречающихся при ходьбе нюансов, например, наличие задира полового покрытия, порожка и т.п. и требуется постоянный контроль со стороны нахождения рядом оператора.
При этом данный АОМУ из-за конструкции корпуса не может быть применен у больных имеющих поражения нижних конечностей в сочетании с поражениями позвоночника, так как звено туловища корпуса не выполняет необходимое функциональное индивидуальное воздействие на позвоночник. При этом габариты, конструктивные особенности известного АОМУ, характеристики воспроизводимых им движений позволяют использовать его только для больных, преимущественно с последствиями тяжелых травм спинного мозга определенной локализации, при тяжелых поражениях после инфарктов, инсультов. Известный АОМУ из-за конструктивных особенностей не обеспечивает воздействие на ряд патологических проявлений свойственных целому ряду поражений опорно-двигательной системы больного, например, возникающие вторичные деформации, деформации стопы, тазобедренного сустава, позвоночника и другие и таким образом его применение у больных с ортопедическими заболеваниями не представляется возможным.
Из-за конструктивных решений несущих звеньев, креплений бедра, голени возникают локальные пережимы мягких тканей, сосудов, нервных окончаний, что особенно отрицательно сказывается при парезах, параличах нижних конечностей различной этиологии. Несущие звенья и крепления в известном АОМУ не обеспечивают ортопедическую коррекцию расположения сегментов, суставов конечностей, которая необходима при последствиях ряда заболеваний, поражений опорно-двигательной системы больного. Кроме того, в известном АОМУ нерационально распределены в сагиттальной плоскости массы его составляющих компонентов, что препятствует рациональным маятникообразным движениям свойственным при ходьбе человека в норме, а также отсутствуют упругие элементы, которые свойственны человеку в норме при рассмотрении его с позиций биомеханики и которые обеспечивают рекуперацию энергии в процессе локомоции.
Отсутствие рациональных масс-инерционных и упругих характеристик у известного АОМУ не дает возможность снизить требуемую мощность исполнительного механизма, требования к элементам питания, а, следовательно, снизить их массу, габариты, сложность исполнения.
Известен АОМУ состоящий из корпуса, исполнительного механизма, блока управления с датчиками, источников питания, соединенных между собой коммуникационной сетью, несущих звеньев туловища, бедра, голени и стопы, соединенных тазобедренным шарнирным узлом с осями и имеющим упоры, коленным и голеностопным шарнирными узлами с осями соответственно, элементов креплений. [3]. Известный АОМУ имеет относительно небольшую массу и габариты и обеспечивает передвижение больного за счет передвигаемых АОМУ нижних конечностей и может использоваться при реабилитации как взрослых, так и подростков. Передвижение в известном АОМУ возможно не только по ровной поверхности, но и без сопровождающего, и без дополнительных опор.
Однако известный АОМУ обладает рядом недостатков. Так он из-за конструкции корпуса не может быть применен у больных имеющих поражения нижних конечностей в сочетании с поражениями позвоночника и даже может усугубить за счет наличия части корпуса весом более 5 кг на спине имеющиеся поражения или вызвать их при длительном использовании известного АОМУ.
Размещение тяжелых резко выступающих элементов на спине и на боковых поверхностях в области тазобедренных суставов намного смещает центры масс сегментов тела и всего больного в целом, что ведет к резкому нарушению биомеханических характеристик ходьбы, к их разбалансировке. При этом наблюдается несовпадение осей шарниров с осями суставов приводящее к нарушению схемы построения всей системы «АОМУ - больной». Кроме того, резко увеличенные габариты мешают больному в известном АОМУ использовать дополнительные опоры в виде трости, канадской палочки, ходунков, что необходимо в ряде случаев, особенно в период обучения, при ухудшении самочувствия больного. Известный АОМУ из-за конструктивных особенностей, таких как отсутствии гильз, специальных креплений и других не обеспечивает воздействие на ряд патологических проявлений свойственных целому ряду ортопедических поражений опорно-двигательной системы больного, являющихся последствиями заболеваний, деформаций, например, таких как возникающие вторичные деформации, деформации стоп, контрактуры, патологические установки в суставах нижних конечностей, нарастание степени патологических искривлений позвоночника.
Известный АОМУ перемещается в соответствии с определенными программами. Программы не могут учесть все разнообразие встречающихся при ходьбе нюансов, что может приводить к потере равновесия и падению. При этом в известном АОМУ отсутствует взаимосвязь с нейросистемой больного, обеспечивающей постоянное внимание изменяющейся ситуации в процессе движения.
Из-за конструктивных решений несущих звеньев, которые расположены только с наружной стороны, конструкции креплений бедра, голени возникают локальные пережимы мягких тканей, сосудов, нервных окончаний, что особенно отрицательно сказывается при парезах, параличах нижних конечностей различной этиологии. Несущие звенья и крепления в известном АОМУ не обеспечивают ортопедическую коррекцию расположения сегментов, суставов конечностей, которая необходима при последствиях ряда заболеваний, поражений опорно-двигательной системы больного. Кроме того, в известном АОМУ из-за нерационально распределенных масс в его звеньях создается препятствие рациональным маятникообразным движениям в сагиттальной плоскости, свойственным при ходьбе человека в норме и обеспечивающим минимизацию энерготрат. Также в известном АОМУ отсутствуют упругие элементы. Упругие связи свойственны человеку в норме при рассмотрении его с позиций биомеханики и обеспечивают рекуперацию энергии в процессе локомоции в тазобедренном, голеностопном сегменте и в стопе. Отсутствие рациональных масс-инерционных и упругих характеристик у известного АОМУ не дает возможность снизить требуемую для передвижения мощность исполнительного механизма, требования к элементам питания, а, следовательно, снизить их массу, габариты сложность в исполнении.
Кроме того, в известном АОМУ при его использовании на больном нерационально расположены в сагиттальной плоскости оси тазобедренных, коленных и голеностопных шарнирных узлов относительно соответствующих суставов, что приводит при ходьбе к нарушению схемы построения системы «АОМУ-больной» кинематической несовместимости, увеличению энерготрат и поршневым перемещениям ноги относительно креплений, которые еще больше пережимают сегменты конечности. Еще одним недостатком известного АОМУ является отсутствие в нем воздействия на определенные мышцы с целью активного вовлечения их в процесс передвижения, а также их функционального восстановления и укрепления с одновременным снижением требований по мощности исполнительного механизма и требований к элементам питания.
Выполнение гильзы стопы в виде горизонтальной пластины с вертикальными планками, без выкладки сводов и боковых отводов, препятствует рациональной нагрузке стопы, не удерживает ее в функциональном положении, что приводит к патологиям стопы, атрофии переднего ее отдела, которые усугубляют уже имеющиеся поражения у больных с параличами, парезами нижних конечностей. Так как пластин всего четыре типоразмера, то это часто не соответствует размерам стопы больного, создает затруднение при ходьбе. Кроме того, в известном АОМУ не предусмотрены меры безопасности от падения при встрече с препятствиями во время обучения больного ходьбе в нем, а также нет предупреждающих во время ходьбы сигналов о неровностях, в том числе для больных с ослабленным зрением и слухом, что может привести к потере координации и падению.
Технической задачей данного изобретения является создание АОМУ обладающего обеспечением активизации двигательных функций в области тазобедренного сустава в процессе ходьбы за счет создания внешних моментов сил, осуществления принудительного сгибания и разгибания нижней конечности в фазе переноса, обеспечения возможности больного сесть и встать, с одновременным снижением энерготрат и требований к мощности, габаритам и массе исполнительных механизмов за счет рациональной схемы построения АОМУ, встроенных упругих элементов и рационального распределения масс и нагрузок на сегменты конечности, а также обеспечение требуемой ортопедической коррекции, вовлечение остаточных возможностей в процесс движения мышц, обеспечения движений в переднем отделе стопы при ходьбе и повышение безопасности применения АОМУ в процессе реабилитации.
Поставленная цель достигается тем, что несущее звено туловища выполнено в виде фигурной гильзы корсета с внутренними нишами, а несущее звено бедра выполнено в виде фигурной гильзы бедра с внутренними нишами гильзы бедра, а несущее звено голени выполнено в виде фигурной гильзы голени, причем несущее звено стопы выполнено в виде фигурной гильзы стопы с внутренней подошвенной поверхностью, на которой установлена ортопедическая стелька с отверстиями на переднем и заднем участках, при этом датчики выполнены двух типов, одни в виде электромиографических накладных электродов, которые установлены в нишах гильз корсета и бедра, а другие выполнены в виде накладных силоизмерительных датчиков, которые установлены в отверстиях ортопедических стелек на внутренней подошвенной поверхности гильзы стопы, причем все датчики присоединены с помощью клемм к коммуникационной сети, при этом блок управления включает микроконтроллер, инкрементный эндокер, датчик силы тока и интерфейс пользователя, который имеет выключатель питания, индикатор, регулятор скорости ходьбы и три кнопки переключения, режима, причем блок управления и источник питания имеют единое основание, установленное на задней поверхности гильзы корсета на уровне общего центра масс больного в проекции на фронтальную плоскость, при этом исполнительный механизм выполнен в виде линейного актуатора одним концом установленного на гильзе корсета, а другим концом на гильзе бедра, причем тазобедренный узел имеет верхнюю и нижние части, при этом на задней поверхности верхней части установлен регулируемый упругий элемент, а на задней поверхности нижней части установлен упор, причем шарнирная ось тазобедренного узла в проекции на сагиттальную поверхность находится на вертикальной оси на уровне тазобедренного сустава, при этом коленные узлы выполнены полицентрическими и расположены как с наружной, так и с внутренней стороны и находятся на вертикали в проекции на сагиттальную плоскость, а голеностопные узлы расположены, как с наружной, так и с внутренней стороны и выполнены из полимерного материала Х-образными имеющими центральное утолщение с вкраплениями наноразмерных частиц по массе до одного процента от массы полимерного материала и расположены на уровне голеностопного сустава на вертикали, причем гильза споты выполнена с индивидуальными выкладками сводов стоп, а передний участок гильзы стопы, начиная от линии, соединяющей центры головок плюсневых костей выполнен упругим, с возможностью обеспечения движения в плюснефаланговом и межфаланговом сочленениях, при этом гильза голени и гильза бедра соединены установленной на их передне-боковых плоскостях упругой регулируемой градуированной полиуретановой тягой в концы которой вкраплены наноразмерные частицы, причем на боковой наружной поверхности гильзы стопы установлена видеокамера, имеющая устройства звуковой и световой сигнализации и соединенная с блоком управления, при этом несущие звенья бедра, голени и стопы имеют центры масс, совпадающие с центрами масс соответствующих сегментов нижней конечности больного в проекции на сагиттальную плоскость, а фигурные гильзы корсета, бедра, голени и стопы выполнены индивидуальными из композиционного материала на основе углеродной ленты и ткани на основе нити Русар, а в качестве связующего использован полиуретановый компаунд.
На фиг. 1 представлен общий вид аппарата ортопедического на нижнюю конечность с микропроцессорным управлением, который состоит из следующих составляющих:
- исполнительного механизма в виде линейного актуатора поз. 1, как элемента нейроуправляемого узла, установленного одним концом на гильзе корсета, а другим на гильзе бедра;
- аккумулятора поз. 2, расположенного в кармане гильзы корсета;
- полицентрических коленных узлов поз. 3, имеющих верхние поз. 4 и нижние шины поз. 5;
- голеностопных узлов поз. 6;
- датчиков в виде электромиографических вкладных электродов поз. 7, устанавливаемых в нишах бедра и корсета поз. 28 и накладных силоизмерительных датчиков, устанавливаемых на подошвенной области гильзы стопы поз. 8 в отверстиях ортопедической стельки поз. 9;
- нейроуправляемого узла с блоком управления поз. 10, включающего плату управления с микроконтроллером, элементы локальной системы управления, выходные гнезда, элементы крепления узла на гильзе корсета;
- тазобедренного узла поз. 11, оригинальной конструкции с упругим элементом;
- элементов крепления поз. 12, гильз на теле больного;
- гильзы корсета поз. 13, с задним карманом поз. 14, в котором устанавливаются элементы нейроуправляемого узла;
- гильзы бедра поз. 15, на которое установлены одними концами тазобедренный узел и актуатор;
- гильзы голени поз. 16, на которой показана установка нижних шин поз. 5 в композиционном материале;
- гильзы стопы поз. 17, с упругим подошвенным слоем поз. 18;
- деталей крепления тазобедренного узла (верхней его части) к корсету поз. 19;
- деталей крепления актуатора поз. 20, выполненные в виде втулок поз. 21 с расположенными внутри винтами поз. 22;
- съемного пульта управления поз. 23 с кнопками поз. 24;
- основания блока управления нейроуправляемого узла поз. 25;
- клемм поз. 26;
- полуколец поз. 27;
- ниши поз. 28 в гильзах бедра и корсета;
- упругой регулируемой тяги поз. 29;
- видеокамера поз. 30.
Гильзы стопы, голени, бедра и корсета выполнены индивидуально из композиционного материала, обладающего разнопрочностью, воздухопроницаемостью. В качестве связующего использован полиуретановый компаунд АДВ, а в качестве армирующего материала трикотажная труба из полиэфирной нити, углеткань, углелента, а в местах требующих высокую прочность (крепежные узлы) ткань из нити Русар. Гильзы имеют разнопрочность за счет укладки углеленты и углеткани определенным образом и нанесение второго слоя связующего на 65±5% от всей поверхности гильзы. При таком изготовлении, гильза получается с прочной задней стенкой и более эластичной по краям, что обеспечивает комфортное надевание и снимание АОМУ с нижней конечности пациента. Кроме этого, гильзы голени и бедра имеют усиливающие полукольца. Это позволяет исключить локальные пережимы мягких тканей, сосудов, нервных окончаний и целесообразно с медицинской точки зрения, распределить нагрузку, а применение композиционных материалов позволило снизить массу АОМУ до 3.0 кг. При этом разнопрочность гильз позволила интегрировано получать оболочковую систему с различными характеристиками, что, как указано выше, позволило осуществлять простоту и комфортность пользования, а также целесообразное распределение нагрузок.
В гильзах стопы и бедра имеются ниши, в которых расположены датчики, что позволяет четко фиксировать их расположение относительно участков конечностей, предотвращая смещение при ходьбе. Гильзы бедра и голени с наружной и внутренней сторон соединены посредством коленных шарнирных узлов, а гильзы голени и стопы также соединены с наружной и внутренней стороны посредством голеностопных шарнирных узлов. Наличие шарнирных узлов, как с внешней, так и с наружной сторон каждой конечности в совокупности с гильзами, имеющими полукольца позволило конструкции осуществить жесткую коррекцию взаимоположения звеньев, а, следовательно, корригировать расположение сегментов ног в таком АОМУ и, тем самым, осуществить ортопедическую коррекцию и предотвращать вторичные деформации пораженных конечностей. Верхний край гильзы бедра имеет посадочное кольцо, благодаря чему возможно осуществлять дозированную разгрузку, а также обеспечивать комфортность пользования АОМУ.
Шарнирная ось тазобедренного узла в проекции на сагиттальную поверхность находится на вертикальной оси на уровне тазобедренного сустава. Мгновенные оси полицентрических коленных узлов при выпрямленных их положениях находятся в проекции на сагиттальную плоскость на вертикали, а при движении в коленном узле мгновенная ось описывает циклоиду, благодаря чему эффективная длина конечности уменьшается, и ее пронос над поверхностью облегчается. Голеностопные шарнирные узлы расположены на уровне голеностопного сустава на вертикали, а их оси совмещены с осями голеностопного сустава.
Голеностопные шарнирные узлы выполнены из полимерного материала Х-образными, имеющими центральное утолщение с вкраплениями наноразмерных частиц по массе до 10 процентов от массы полимерного материала. Такое их выполнение гарантирует надежную установку шарнирных узлов, а также позволяет увеличить жесткость узлов при их сгибании в соответствии с медицинскими и биомеханическими показаниями. При этом в АОМУ центр масс несущих звеньев бедра и голени со стопой совпадает со среднеантропометрическим центром масс бедра и голени со стопой людей с характеристиками подобными характеристикам больного. Это нормализует масс-инерционные характеристики звеньев АОМУ в процессе фазы переноса конечностей и тем самым снижает энерготраты внешнего источника энергии, необходимую мощность приводов, а, следовательно, снижает габариты исполнительных механизмов с одновременной нормализацией биомеханического рисунка перемещения конечностей.
Крепление АОМУ к туловищу осуществляется с помощью гильзы корсета поз. 13, имеющей на задней поверхности карман поз. 14, в котором устанавливаются элементы нейроуправляемого узла. Гильза корсета выполняется индивидуально с учетом поражения позвоночника у конкретного больного из композиционного разнопрочного материала, это позволяет использовать АОМУ для больных с поражениями не только нижних конечностей, но и позвоночника, которые часто встречаются при параличах, парезах нижних конечностей. В кармане гильзы корсета установлены источник питания и элементы нейроуправляемого узла так, чтобы центр их масс в проекции на фронтальную плоскость совпадал со среднестатистическим центром масс человека. Такое расположение позволяет не нарушать масс-инерционные характеристики биомеханической системы больного. При этом уменьшаются требования к мощности привода и к емкости элементов питания, снижаются их габариты и масса.
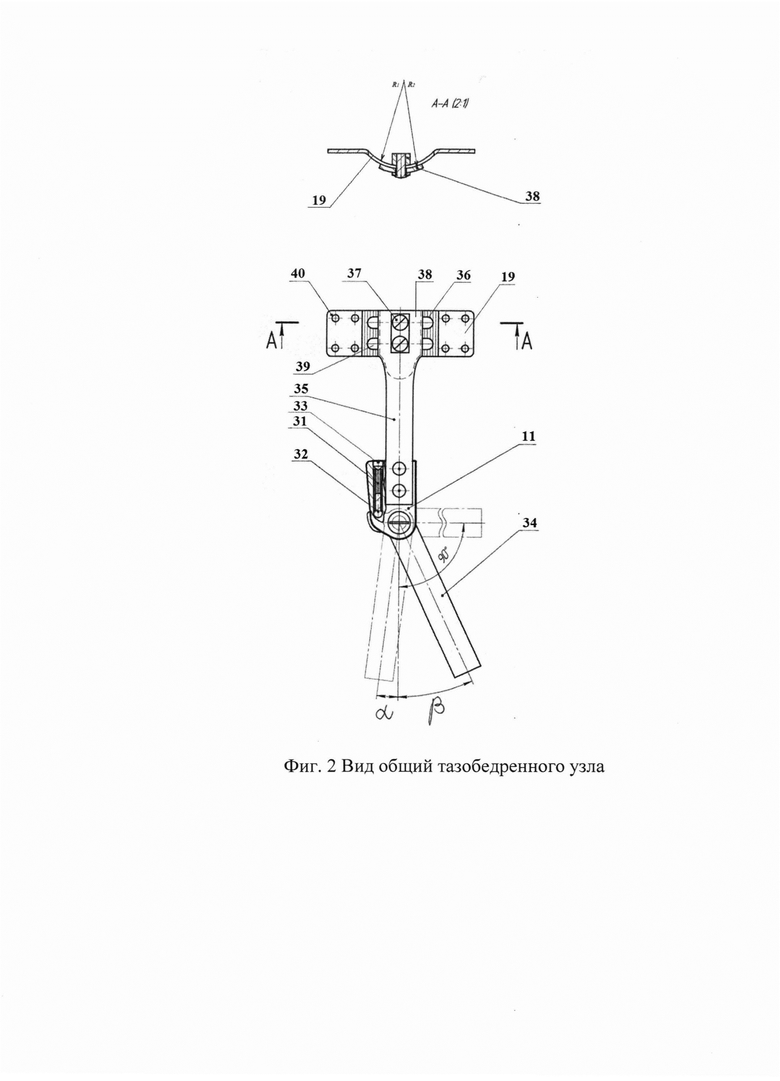
На фиг. 2 показан тазобедренный узел, который включает в себя тазобедренный шарнир поз. 11 с элементом упругой связи в виде пружины сжатия поз. 31, действующей на толкатель поз. 32. За счет винта поз. 33 возможно регулировать предварительную жесткость пружины в зависимости от индивидуальных параметров больного и медицинских показаний.
Во время ходьбы при переразгибании в тазобедренном суставе на угол α, что происходит, начиная с середины фазы опоры на всю стопу, пружина сжимается, играя роль амортизатора и запасая энергию, а в момент отрыва стопы от опоры в начале фазы переноса, она разжимается до угла β, участвуя в выносе звена бедра, соединяемого с нижней частью шины поз. 34 вперед. Исходя из момента сил, который может быть осуществлен относительно тазобедренного сочленения, представилось целесообразным выполнить пружину из проволоки.
Кроме того, тазобедренный узел имеет горизонтальную пластину поз. 19 с установленной на ней верхней частью шины поз. 35 тазобедренного шарнира.
Верхний конец шины тазобедренного шарнирного узла выполнен в виде пластины изогнутой по окружности с радиусом R с вертикальными зубцами поз. 36 и отверстиями, в которых установлены винты с гайками поз. 37, для соединения верхнего конца верхней шины с пластиной поз. 38, которая также выполнена изогнутой по окружности с радиусом R1 и имеет вертикальные зубцы. Зубцы входят в зацепление с вертикальными зубцами верхнего конца шины. На пластине поз. 19 имеются горизонтальные пазы поз. 39, в которые входят винты поз. 37 крепления верхнего конца шины к пластине. Для крепления пластины к корсету имеются отверстия поз. 40. За счет зубчатого зацепления пластины и верхнего конца шины тазобедренного шарнирного узла, а также горизонтальных пазов, по которым возможно передвижение верхнего конца шины за счет винтов, возможно дискретное передвижение верхнего конца шины в горизонтальном направлении с фиксацией в требуемых положениях. При этом происходит ротация наружу всех нижележащих элементов АОМУ с установленной в нем конечностью, обеспечивая возможность регулировки в горизонтальной плоскости при установке.
Подошвенная часть гильзы стопы снизу выполнена в виде рессоры, а сверху с выкладкой сводов стопы арочного типа. Это обеспечило рекуперацию энергии в процессе ходьбы в АОМУ за счет накопления потенциальной энергии и ее перехода в кинематическую при отталкивании от поверхности опоры в конце фазы опоры и начале фазы переноса. Передние поверхности гильзы бедра и гильзы голени соединены упругой полиуретановой регулируемой градуированной тягой, концы которой выполнены с наноразмерными частицами. Благодаря этому, находящаяся в исходном положении в начале периода переноса при угле сгибания более 20 градусов упругая тяга, начинает растягиваться до достижения угла сгибания в коленном сочленении в 60±10 градусов, при этом создается момент сил, способствующий выносу звена голени со стопой вперед для разгибания его по отношению его к звену бедра. Таким образом наличие упругой полиуретановой регулируемой градуированной тяги облегчается процесс локомоции. Введение наноразмерных частиц в упругую полиуретановую тягу массой до 1% от массы полимерного материала позволило упрочнить места соединения тяги с гильзами, оставляя серединную часть эластичной.
На верхней боковой поверхности гильзы стопы установлена видеокамера со звуковым сигналом, соединенная гибким кабелем с блоком управления. За счет наличия видеокамеры на гильзе стопы АОМУ, которые тестированы таким образом, что при появлении какого-либо препятствия подается команда на микрофон, совмещенный с камерой и, одновременно, раздается звуковой сигнал, предупреждающий больного об опасности столкновения ноги с препятствием. Особенно важна подача звукового сигнала для больных с ослабленным зрением, а также, одновременно подается сигнал на блок управления, после чего осуществляется коррекция движений исполнительного механизма для предотвращения столкновения больного с препятствием. Основными компонентами нейроуправляемого узла являются:
1) плата управления с микроконтроллером;
2) приводная система толчкового механизма;
3) датчики управления;
4) датчики и сенсоры обратной связи;
5) элементы локальной системы управления;
6) внешний источник энергии.
В качестве приводного механизма был выбран линейный актуатор с коллекторным двигателем постоянного тока. С учетом габаритных размеров АОМУ, была выбрана модель линейного актуатора с определенной длиной хода штока.
В питаемом внешним источником нейроуправляемом узле, с помощью элементов локальной системы управления пациент выбирает режим работы нейроуправляемого узла.
При этом в зависимости от выбранного режима работы, при поступлении сигнала с датчиков управления микроконтроллер платы управления передается управляющие команды приводной системе толчкового механизма. Положение приводного механизма, в свою очередь, определяется, и корректируется микроконтроллером по сигналу датчиков и сенсоров обратной связи. Данный алгоритм взаимодействия компонентов отображается на обобщенной структурной схеме. При этом движение приводного механизма осуществляется плавно и без заеданий.
Для обеспечения обратной связи по положению штока линейного актуатора, в качестве датчиков обратной связи использованы потенциометры и инкрементный энкодер, устанавливаемый на валу электродвигателя актуатора.
Поскольку среднегодовая температура наружного воздуха в России составляет около -2°С, а также по причине устойчивой характеристики разряда и высокой удельной энергоемкости, в качестве внешнего источника энергии была выбрана литий-железо-фосфатная аккумуляторная батарея.
Зарядка внешнего источника энергии осуществляется от бытовой сети электропитания переменного тока напряжением 220 вольт с использованием зарядного устройства, обеспечивающей силу тока заряда, равную 10 А.
Поскольку предельное электрическое напряжение внешнего источника энергии превышает входное напряжение платы управление, то для ее питания в структурную схему был добавлен понижающий преобразователь напряжения. Для выполнения прямого подключения привода механизма, в структурную схему нейроуправляемого узла введен контроллер мотора большой мощности. Для дополнительного контроля работы приводной системы толчкового механизма, использован датчик силы тока с пределом измерения в 30 А, установленный на линии электропитания контроллера мотора. Датчиками управления нейроуправляемым узлом являются два накладных активных электромиографических электрода, которые закрепляются поверх управляющих мышц пациента для улавливания их биоэлектрического сигнала. В структурную схему дополнительно добавлены два корректирующих датчика давления, которые размещены в носковой и пяточной части искусственной стопы АОМУ (фиг. 1, поз. 8).
Для переключения режимов работы имеются три тактовые кнопки, а регулировку скорости работы привода толчкового механизма осуществляли с помощью потенциометра.
Для наглядного отображения параметров заряда внешнего источника энергии, использовали специализированный ваттметр с выносным индикаторным блоком и токовым шунтом, устанавливаемым в линию электропитания нейроуправляемого узла, который работает в соответствии со структурной схемой, описывающей процесс взаимодействия элементов.
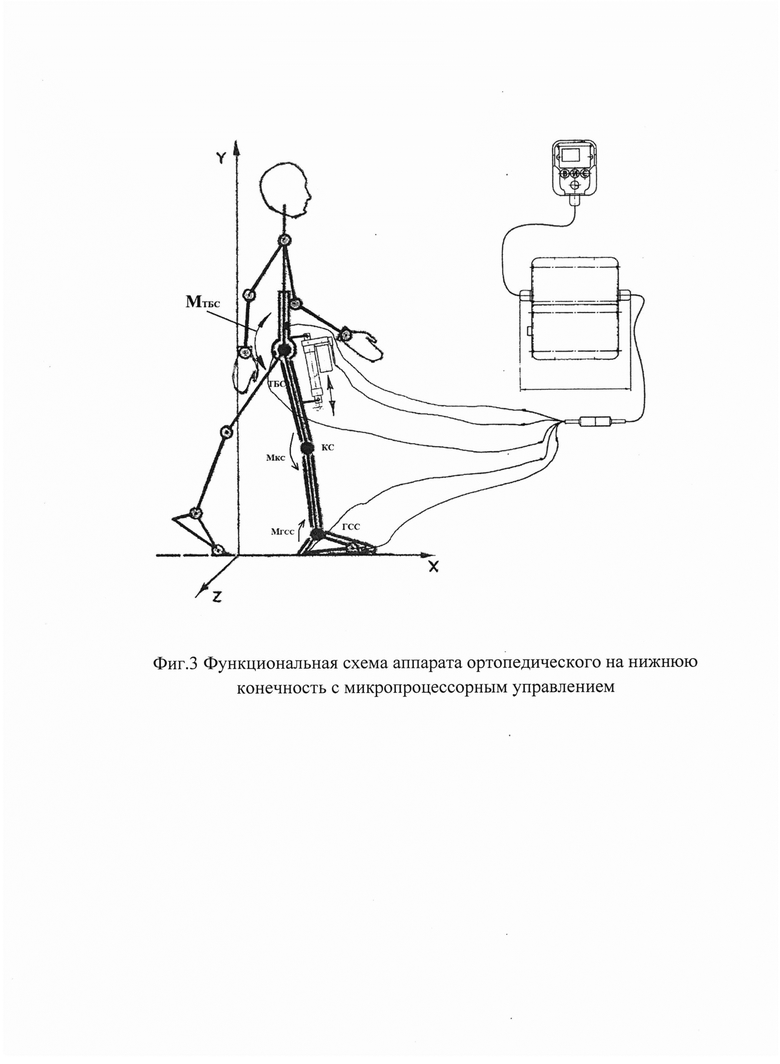
Функциональная схема АОМУ представлена на фиг. 3.
Изготовление АОМУ осуществляется следующим образом. Проводится осмотр пациента, и определяются показания к назначению АОМУ. Определяются требуемые характеристики АОМУ и его параметры. В бланк-заказ записываются характеристики АОМУ, его параметры, комплект узлов, степень и участки армирования гильз, количество и расположение армирующих слоев, вид голеностопного шарнира, параметры нейроуправляемого узла и его характеристики.
Мастер в присутствии врача-ортопеда снимает с пациента мерки
- длину стопы (от перпендикуляра к пятке до перпендикуляра к большому пальцу);
- пол - колено;
- пол - тубер;
- пол - ТБС;
- пол - ГСС;
- высоту корсета сзади (от ягодичной складки);
- высоту корсета спереди (от низа живота); у женщин определяется положение грудных желез, если они охватываются корсетом;
- ширину ГСС;
- ширину КС;
- ширину на уровне тазобедренных суставов.
Снимает размеры обхвата сегментов и суставов конечности:
- на уровне плюснефаланговых суставов;
- «косой подъем»;
- на уровне лодыжки;
- на уровне границы нижней и средней трети голени;
- на уровне границы средней и верхней трети голени;
- на уровне коленного сустава;
- на уровне границы нижней и средней трети бедра;
- на уровне границы средней и верхней трети бедра;
- от промежности (тубера) к большому вертелу;
- на уровне тазобедренных суставов;
- на уровне талии;
- на уровне груди под грудными железами.
Все размеры (22 позиции) записываются в бланк-заказ.
Фломастером очерчиваются контуры наружной и внутренней лодыжки и обозначаются их вершины;
Обозначаются и наносятся отметки положения наружного и внутреннего надмыщелков бедра и положения оси тазобедренного сустава в проекции на сагиттальную плоскость;
Очерчивается контур надколенника и отмечается его середина.
Проводят линию через головки плюсневых костей со стороны подошвенной поверхности стопы.
Делается обчерк стопы здоровой и пораженной конечностей.
После этого мастер приступает к изготовлению гипсового негатива, а по нему позитива. Изготовление негатива и позитива происходит по установленной на предприятии технологии. Сначала изготавливается негатив с пораженной конечности пациента, а затем и позитив на всю ногу. После этого аналогично изготавливается негатив корсета, а затем его позитив.
На позитиве нижней конечности, фломастером отмечается вершина большого вертела, вершины внутренней и наружной лодыжек, а также внутреннего и наружного надмыщелков бедра. По указанию врача, в соответствии с медицинскими требованиями, обозначают на позитиве точки центров осей голеностопного и коленного шарниров аппарата, контуры расположения облегченных шин и полуколец из углепластика, записать фамилию и дату изготовления.
На позитиве корсета обозначают верхний контур, место установки пластины тазобедренного узла и верхнего конца актуатора записывают фамилию и дату изготовления позитива.
Затем подбирают полуфабрикаты в соответствии с бланком-заказом.
Позитив зажимают в тиски горизонтально. Вырезают из листового пенополиэтилена заготовку под вкладыш гильз АОМУ. Разогревают заготовку из пенополиэтилена в термошкафу при температуре 110°С в течение 2-3 минут и затем блокуют ее по позитиву. С помощью ножа обрезают излишки пенополиэтилена. Обматывают позитив в 2-3 слоя пищевой полиэтиленовой пленкой. После чего натягивают первый слой трикотажного рукава, тщательно разглаживают, поворачивают несколько раз вокруг оси и, вывернув рукав, натягивают второй слой. Вырезают из углеродной ленты полосы по разметке позитива. Ширина определяется по медицинским показаниям. По разметке на позитиве прокладывают полосы углеродной ленты, прикрепив полосы углеродной ленты клеем к позитиву.
В верхней, средней и нижней части бедра, в верхней, средней и нижней части голени прокладывают полукольца из углеродной ленты. Полукольца на позитиве закрепляют клеем. На подошвенную часть гильзы стопы укладывают дополнительный слой углеродной ленты и фрагмент ткани «Русар», образуя рессору. На корсете, в области установки пластины тазобедренного узла, укладывают дополнительные слои углеродной ленты. На позитив нижней конечности наносят дополнительные бортики. Подготовленный позитив устанавливают в тиски и на него надевают слой трикотажной трубы.
Трикотажная труба должна быть выполнена из поперечно-вязаного трикотажа с растяжимостью от 50 до 70%.
После этого приготавливают полиуретановую композицию I (полиуретановый компаунд АДВ части А и Б соединить 1:1 и перемешать). Пропитают полиуретановой композицией I трикотажную трубу и углеродную ленту по задней и боковой поверхности с обхватом 65±5%.
Для того чтобы композиционный материал обладал воздухопроницаемостью, углеродная лента берется равноплотная с линейной заполняемостью 65-75%.
В местах, где необходима, по медицинским показаниям, большая жесткость, дополнительно укладывают фрагменты из высокопрочной ткани (ткань выполнена из нити Русар), приклеив их поверх углеродной ленты.
Ширина и количество ленты выбирается исходя из медицинских показаний к жесткости гильз.
На позитив с вкладышами надевают второй слой трикотажной трубы с аналогичными характеристиками. Затем приготавливают полиуретановую композицию II (полиуретановый компаунд АДВ части А и Б соединить 1:0,5-0,4 и перемешать). Наносят подготовленную композицию II на первый и второй слой трикотажной трубы спереди, охватывая 35±5% поверхности внахлест на область нанесенной полиуретановой композиции I. Выдерживают полученный позитив в течение 24 часов при комнатной температуре.
Полученную заготовку гильзы разрезают по вертикали в отмеченных местах. Заготовку гильз снимают с позитива.
Механическим путем, на шарошечно-полировальном станке, снимают излишки материала до получения гладкой ровной поверхности. Проводят легкую механическую обработку внутренней поверхности заготовка гильзы до частичного открытия пор композиционного материала.
Аналогично изготавливают заготовку гильзы корсета. Подбирают полуфабрикаты согласно бланк-заказу.
Определяют по медицинским показаниям схему построения АОМУ, наметив центры осей вращения узлов в проекции на сагиттальную плоскость и гнут верхнюю и нижнюю шины коленного узла по контуру слепка и, наметив на шинах коленного узла центры отверстий для крепления шин к гильзам, сверлят отверстия для крепления шин коленного узла. Аналогично были выполнены отверстия в гильзах для установки голеностопных, тазобедренного узлов, а также на гильзе корсета с целью установки пластины для крепления тазобедренного узла.
В соответствии со схемой построения АОМУ, с помощью винтов и гаек с шайбами устанавливают пластину на корсете, шину тазобедренного узла на гильзе бедра, соединив с верхней шиной коленного узла, нижнюю шину коленных узлов,
При применении по медицинским показаниям упругих полимерных голеностопных шарниров устанавливают их на верхнем боковом крае гильзы стопы и нижнем боковом крае гильзы голени также с помощью винтов и гаек с шайбами.
Для конкретного больного с целью обеспечения требуемой угловой скорости сгибания и разгибания тазобедренного шарнира с учетом поражений наблюдаемых у больного, был выбран линейный актуатор минимальной длиной 260 мм, со скоростью перемещения штока, в зависимости от нагрузки, составляющей от 45 до 56 мм/с и усилием втягивания и выталкивания, равным 120 Н.
Угловая скорость сгибания и разгибания шарнира тазобедренного сустава, обеспечиваемая толчковым механизмам, составляет не менее 25%, а сила, развиваемая данным механизмом - превышающей 50 Н.
Разрешение энкодера составило 0,3 мм на один импульс.
Расчетная угловая скорость сгибания тазобедренного шарнира в рабочем режиме составила 27%.
Исходя из допущения, что за сутки пациент с использованием АОМУ для одной ноги совершит 3750 шагов длительностью в одну секунду, была определена расчетная емкость внешнего источника энергии, составившая 15А⋅ч.
Для реализации локальной системы управления нейроуправляемым узлом были определены типовые действия пациента в ортезе.
К ним относились включение и выключение нейроуправляемого узла, переключение режимов работы (режим ходьбы, режим «сесть» и режим «встать») и настройки скорости работы привода толчкового механизма.
Сборка нейроуправляемого узла проводилась в следующей последовательности.
На стельках стоп АОМУ размещали управляющие датчики давления в варианте силоизмерительных резисторов. Датчики давления размещали в области проекции пятки и носка пользователей так, чтобы при перенесении опоры стопы на носок или пятку, обеспечивать наиболее сильный и устойчивый сигнал управления. С целью защиты от деформации, были смонтированы измерительные площадки датчиков на гладкие диски из нержавеющей стали толщиной не более 2 мм. Вклеивание датчиков давления осуществляли с помощью клея ПВА, с учетом гибкости стельки, при монтаже датчиков использовали дополнительную мягкую подложку, например, из вспененного полиэтилена. Монтаж измерительных кабельных линий для датчиков давления проводили методом пайки с дополнительной фиксацией и изоляцией проводников диэлектрическим термогерметиком. Датчики и отходящие от них измерительные линии закрывали стелькой из вспененного материала с применением фиксируемого термоклея.
Поскольку управляющие электромиографические электроды для работы требовали соприкосновения непосредственно с поверхностью кожи пользователя в проекциях управляющих мышц и размещались под нательным бельем, то их жесткое закрепление к конструкции ортопедического АОМУ не производили.
Монтаж приводов толчкового механизма (линейного актуатора) проводили с закреплением их оснований и штоков на двух поворотных шарнирах. Оси данных шарниров выполняли на основе винтов и закрепляли на резьбовые соединения на площадках крепления тазобедренных шарниров на корсете и шинах коленных шарниров на бедре АОМУ. Элементы локальных систем управления нейроуправляемого узла размещали в изготовленных пультах управления. Микроконтроллеры, источники электропитания и другие вспомогательные элементы нейроуправляемого узла размещали внутри кармана, расположенного на корсете сзади.
При прокладке кабельных линий от управляющих датчиков и приводов толчковых механизмов, установленной на гильзе стопы камеры, по поверхности АОМУ, использовали фиксаторы.
После сборки АОМУ проводили предварительную примерку, при этом проверяли расположение осей шарниров голеностопных, коленных и тазобедренного узлов относительно схемы построения АОМУ и суставов конечности пациента. При необходимости отрегулировали их. Проверяли высоту, объемные размеры АОМУ и удобство надевания.
При необходимости проводили локальную подформовку гильз, предварительно прогрев участки гильз электрофеном.
Проверяли зарядку внешнего аккумулятора, наличие сигналов от датчиков и срабатывание исполнительных механизмов в соответствии с заданными характеристиками.
АОМУ надевали на больного в положении лежа или стоя и закрепляли на нем с помощью крепежных элементов. Из кармана, расположенного на задней поверхности корсета, доставали пульт управления и передавали его в руки пациента. После чего активизировали (включали с помощью кнопки) нейроуправляемый узел. Проводили пробную носку в режимах «сесть на стул», «встать со стула», «идти». Сопоставляли получаемые характеристики режимов работы с заданными. При необходимости, проводили переналадку режимов работы нейроуправляемого узла в соответствии с медицинскими показаниями. АОМУ снимали с пациента и приступали к отделке АОМУ:
- отсоединяли нейроуправляемый узел от корпуса изделия;
- нарезали кожу юфть шорно-седельную полосами шириной 20±5 мм в зависимости от размера АОМУ;
- отворачивали гайки, вынимали винты, крепящие к шинам;
- выклеивали торцы гильз по контуру;
- клепали гильзы к шинам и пластину к корсету;
- устанавливали с помощью шайб и винтов шарнирные узлы и шины
- устанавливали на место клапан и предохранитель.
В случае применения голеностопного упругого полимерного шарнира клепали его к краям гильз голени и стопы.
Изготавливали крепежные элементы, по всему АОМУ с применением металлических рамок и ворсовой ленты «Контакт»
Выбор количества креплений и ширины полосы верхней или нижней определяется по месту в соответствии с медицинскими требованиями и данными бланка-заказа.
В соответствии с установленном порядком на предприятии проводили осмотр внешнего вида АОМУ, плавность движений в шарнирах, соответствие размеров размерам, указанным в бланк-заказе. Изготовленные два АОМУ представлены на фиг. 4.
Надевали АОМУ на больного, активизировали нейроуправляемый узел в различных режимах и проверяли удобство пользования, достижение требуемой функциональности.
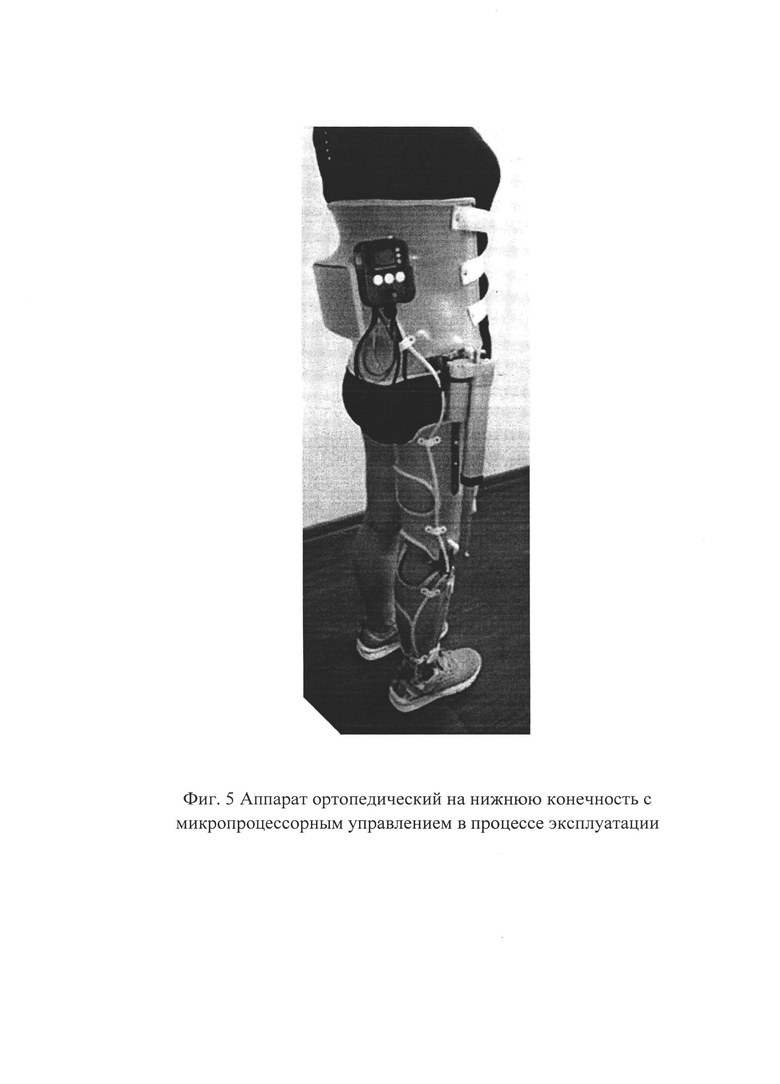
Предварительно обучали пациента правилам пользования АОМУ в соответствии с инструкцией по эксплуатации и оформляли его выдачу в соответствии с требованиями, установленными на предприятии-изготовителе. Изготовленный в соответствии с представленным изобретением АОМУ показан на больном на фиг. 5.
АОМУ выдавали пациенту вместе с инструкцией по эксплуатации и памяткой по пользованию. Клинические примеры.
1. У пациента Л. (18 лет) - парапарез нижней конечности, травматические повреждения на уровне пояснично-крестцового отдела позвоночника.
У пациента наблюдается ослабление мышечной активности левой конечности, движение мышц еле ощущается, тазобедренный сустав остается без движения, заметно угнетение сухожильных рефлексов. В нижней конечности просматривается гипотрофия, пациенту трудно передвигаться без посторонней помощи. Наблюдается отек нижних конечностей, мышцы спины напряжены. Наблюдается дегенеративно-дистрофические поражения позвоночника.
Врачом-ортопедом рекомендовано ношение патентуемого АОМУ в период бодрствования в течение 30 минут. АОМУ применять в течение 2-х месяцев.
После применения АОМУ в течение 2-х месяцев у пациента прошел отек ног, мышечная активность повысилась, подвижность в тазобедренном суставе возросла. Пациент первую неделю надевал АОМУ с помощью ассистента. На 3-й день пациент сам научился управлять пультом и регулировать скорость движения, но делал шаги с поддержкой. К концу 2-го месяца, пациент надевал АОМУ самостоятельно, управлял пультом, выбирая рекомендованную скорость движения. В результате ношения АОМУ уменьшился наклон туловища вперед, левая нога плавно перемещается вперед. Пациент может сидеть, ходить по ступенькам вверх и вниз. Датчики передают сигнал своевременно. Он отметил положительный эффект от установки камеры и звукового сигнала на стопе.
После ношения АОМУ пациента осмотрел врач-ортопед и отметил положительные результаты и рекомендовал ношение АОМУ в течение следующих 4-х месяцев. АОМУ необходимо применять в течение 1 часа, желательно в первой половине дня. Осмотр пациента после длительного применения АОМУ показал значительное улучшение состояния больного: левая нога пациента стала нормально функционировать, туловище не наклонялось вперед, в процессе ходьбы пациент не нуждался в поддержке.
Врач-ортопед рекомендовал продолжить применение АОМУ для нормализации функций позвоночника.
2. Пациент М. (30 лет) - травматические повреждения на уровне пояснично-крестцового отдела, неврит бедренного нерва (феморалис), рассеянный склероз.
У пациента заметно снизилась чувствительность бедра, ослаблены мышцы нижней конечности, что привело к значительному ухудшению двигательной способности в области тазобедренного сустава.
После осмотра пациента, врач-ортопед рекомендовал ношение АОМУ в течение 3-х месяцев. Ношение АОМУ в первые месяцы (1-2 месяца) только в присутствии и с помощью ассистента. Лечение неврита бедренного нерва необходимо в сочетании ношения АОМУ и лечебной гимнастики.
В течение первых 3-х недель пациент надевал АОМУ с помощью ассистента. Пациент совместно с ассистентом управлял пультом нейроузла. Скорость была выбрана минимальная. Постепенно пациент начал более уверенно ходить, мог сидеть, ходить по лестнице в сопровождении ассистента (пациент держался за руку ассистента). После 3-х месяцев применения, патентуемого АОМУ, пациент стал увереннее ходить, старался ходить без сопровождения ассистента (но в его присутствии). Пациент отметил легкость АОМУ, удобство надевания и снятия гильз АОМУ и корсета. Никаких болевых ощущений у пациента не наблюдалось.
Врач-ортопед рекомендовал ношение АОМУ в течение 6-ти месяцев в сочетании с лечебной гимнастикой.
3. У пациента А. (33 года) аддукторный синдром, спастическая диплегия, сгибательно-пронационная установка бедер, аддукто-эквиноплосковальгусные стопы.
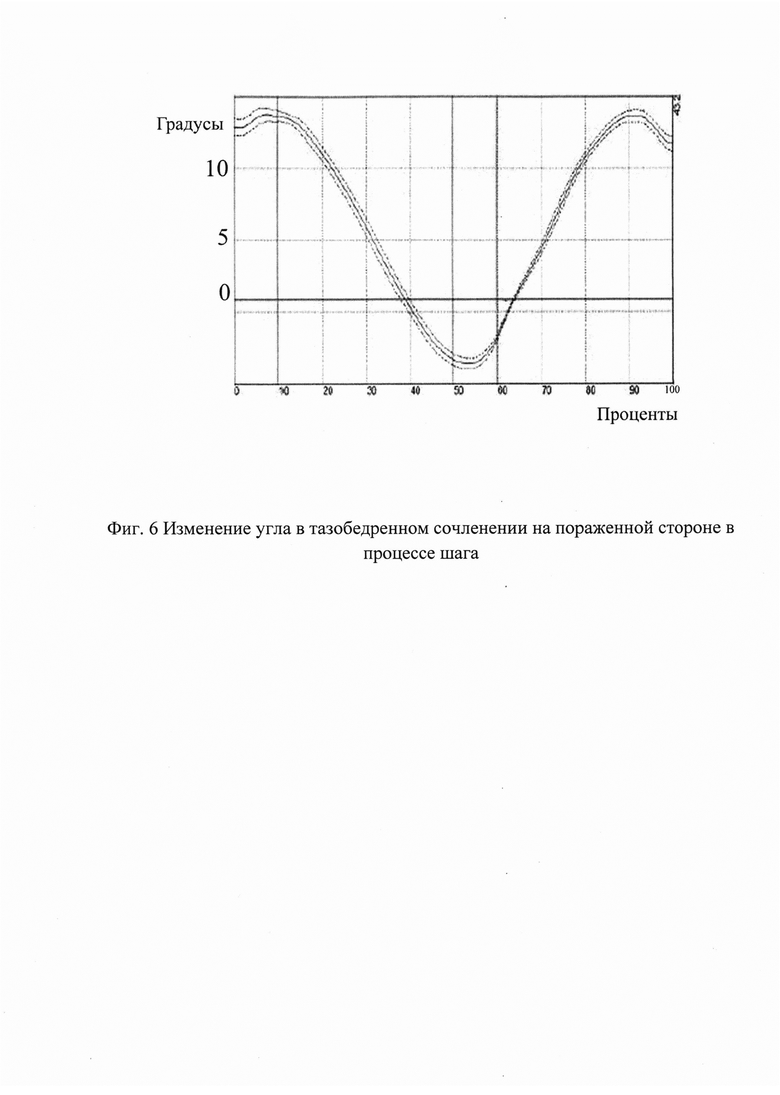
Врачом-ортопедом было рекомендовано ношение предлагаемого АОМУ в период бодрствования, в течение 1 часа. АОМУ применялся в течение 5 месяцев. Осмотр врача показал улучшение рисунка самостоятельной ходьбы, пациент незначительно наклоняется вперед, уменьшилась внутренняя ротация ног, улучшилась опорность задних отделов стоп. Проведенные биомеханические исследования показали, что угол в тазобедренном сочленении при ходьбе в АОМУ достаточно близок к углу в тазобедренном суставе при ходьбе в норме, что представлено на фиг. 6.
Рекомендовано продолжить ношение АОМУ в период бодрствования в течение 8 месяцев.
Предлагаемое изобретение - АОМУ отличается от прототипа следующим:
АОМУ позволяет комплексно осуществлять функции разгрузки, фиксации и ортопедической коррекции пораженной конечности и позвоночника в сочетании с активизацией функций движений, позволяя обеспечивать передвижение в нем больного при значительном ослаблении мышц;
- в предлагаемом АОМУ соблюдается рациональная схема построения: центры масс звеньев совпадают со среднестатистическими центрами масс при норме, что положительно влияет на масс-инерционные характеристики и не нарушает рациональность маятникообразных движений звеньев конечности в период переноса;
- в области тазобедренного узла присутствуют упругие элементы, которые позволяют накапливать потенциальную энергию в фазе опоры при разгибании в тазобедренном суставе и отдавать ее в фазу заднего толчка при начале периода переноса конечности;
- в области голеностопного узла расположены упругие элементы сложной формы, при сжатии которых возникают моменты сил относительно голеностопного сустава в норме;
- АОМУ является индивидуально изготавливаемым изделием, как в случае с поражением нижней конечности, так и с одновременным поражением позвоночника;
- АОМУ обеспечивает не только передвижение по ровной поверхности, но и позволяет осуществлять ходьбу по не ровной поверхности, а также подниматься и спускаться по лестнице;
- АОМУ снабжен видеокамерой и звуковым сигналом, которые предупреждают пациентов об опасности;
- АОМУ имеет массу до 3-х кг, что значительно легче существующих аналогов;
- гильзы АОМУ (бедра, голени, стопы, корсета) изготавливаются из композиционного материала и обладают разнопрочностью, что позволяет комфортно надевать и снимать АОМУ;
- отсутствие локальных пережимов мягких тканей, сосудов, нервных окончаний;
- наличие упругой регулируемой градуированной тяги, обеспечивающей разгибание голени относительно бедра в конце периода переноса пораженной конечности;
- обеспечение звуковых сигналов для повышения безопасности пользования, что особенно важно для больных с ослабленным зрением и расширяет показания к назначению;
- предлагаемый АОМУ предназначен как для взрослых, так и для детей;
- патентуемый АОМУ удобен и безопасен в эксплуатации, пациент сам может управлять АОМУ без посторонней помощи, при соблюдении правил эксплуатации (инструкции по эксплуатации);
- у АОМУ отсутствуют резко выступающие детали, что приводит к равномерному распределению центров масс сегментов тела и всего больного в целом, а это, в свою очередь, не нарушает биомеханических характеристик ходьбы пациента;
- вовлечение нейросистемы, опорно-двигательной системы пациента в обеспечение и контроль движениями, что обеспечивает постоянное внимание изменяющейся ситуации в процессе движения, что повышает уровень безопасности;
- в предлагаемом АОМУ при его использовании на пациенте рационально расположены в сагиттальной плоскости шарнирные оси тазобедренных, коленных и голеностопных узлов относительно вертикали, проходящей через оси соответствующих суставов в проекции их на сагиттальную плоскость, что снижает энерготраты, исключает поршневые движения, улучшает биомеханику ходьбы;
- обеспечение управляемых толкательно-поступательных движений сегмента бедра в фазу переноса нижней конечности, инициируемые биоэлектрическими сигналами и осуществляемые нейроуправляемым узлом;
- улучшение упругих, кинематических, масс-инерционных биомеханических характеристик АОМУ;
- обеспечение движений в плюснефаланговом суставе и межфаланговых суставах стопы пораженной конечности;
- выполнение передней подошвенной области гильзы стопы в виде рессоры, что позволит больному снизить энергозатраты на передвижение, снизить энергозатраты внешнего источника энергии и массу приводного механизма;
- рациональное распределение нагрузки на пораженную конечность за счет изготовления индивидуальных гильз стопы, голени, бедра, что создает ортопедическую коррекцию, снижает вероятность появления вторичных деформаций, увеличивает комфортность;
- снижение воздействия поршневых движений и тем самым снижение травматизации кожных покровов, нарушения кровообращения;
- рациональная кинематическая схема построения, обеспечивающая подкосоустойчивость в коленном сочленении в фазу опоры при ходьбе;
возможность термоподформовки гильз по мере изменения медицинских показаний и антропометрических параметров осуществляемой при температуре менее 90°С;
- минимизация исполнительных габаритных размеров, что позволяет носить АОМУ под одеждой;
- возможность применения АОМУ как в стационарных условиях при проведении реабилитационных мероприятий в специализированных учреждениях, так и в повседневной жизни;
- нормализация биомеханических характеристик ходьбы, снижение утомляемости, энергозатрат при ходьбе больных;
- получение социально-экономического эффекта за счет снижения выраженных ограничений жизнедеятельности, повышения качества жизни, степени самообслуживания, повышения эффективности и снижения сроков реабилитации, что снизит бюджетные затраты.
Источники информации
1. Пат. 2708841, Российская Федерация, МПК А61А 5/00 А61А 5/01 А61Н 3/00. Аппарат ортопедический на всю ногу / Новиков В.И., Ашмарин B.C., Новикова Т.Р., Новиков И.В.; заявитель и патентообладатель ООО «ПРОП МП «ОРТЕЗ». - №2018126709; заявл. 20.07.2018, опубл. 11.12.2019.
2. URL: https://exoatlet.ru/
3. URL: https://zoom.cnews.ru/rnd/article/item/ekzoskelety, idut
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей | 2021 |
|
RU2807146C2 |
| Аппарат ортопедический на всю ногу | 2018 |
|
RU2708841C1 |
| АППАРАТ ОРТОПЕДИЧЕСКИЙ | 2014 |
|
RU2595478C2 |
| АППАРАТ ОРТОПЕДИЧЕСКИЙ НА ГОЛЕНОСТОПНЫЙ СУСТАВ | 2016 |
|
RU2631103C2 |
| Способ изготовления гильз протезно-ортопедических изделий из композиционного материала | 2019 |
|
RU2725082C1 |
| Способ подбора протезно-ортопедического изделия для пациентов с поражением нижней конечности и ортопедический аппарат для его осуществления | 1990 |
|
SU1745235A1 |
| Ортез для гидрореабилитации детей со спастическими параличами | 2017 |
|
RU2651100C1 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2309709C1 |
| КОМПЛЕКТ МОДУЛЕЙ-ОРТЕЗОВ ДЛЯ ЛЕЧЕНИЯ ПАЦИЕНТОВ С ГЕНЕРАЛИЗОВАННЫМ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ | 2016 |
|
RU2659845C2 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |


Изобретение относится к медицинской технике, а именно к аппарату ортопедическому на нижнюю конечность с микропроцессорным управлением. Аппарат состоит из корпуса, исполнительного механизма, блока управления с датчиками, источников питания, соединенных между собой коммуникационной сетью, несущих звеньев туловища, бедра, голени и стопы, соединенных тазобедренным шарнирным узлом с осями, имеющим внешний задний и нижний упоры, внешним коленным и голеностопным шарнирными узлами с осями, элементов креплений. Несущее звено туловища выполнено в виде фигурной гильзы корсета с внутренними нишами, а несущее звено бедра выполнено в виде фигурной гильзы бедра с внутренними нишами гильзы бедра. Несущее звено голени выполнено в виде фигурной гильзы голени, а несущее звено стопы выполнено в виде фигурной гильзы стопы с внутренней подошвенной поверхностью, на которой установлена ортопедическая стелька с отверстиями на переднем и заднем участках. Датчики выполнены двух типов, одни в виде электромиографических накладных электродов, которые установлены в нишах гильз корсета и бедра, а другие выполнены в виде накладных силоизмерительных датчиков, которые установлены в отверстиях ортопедических стелек на внутренней подошвенной поверхности гильзы стопы. Все датчики присоединены с помощью клемм к коммуникационной сети. Блок управления включает микроконтроллер, инкрементный энкодер, датчик силы тока и интерфейс пользователя. Последний имеет выключатель питания, индикатор, регулятор скорости ходьбы и три кнопки переключения режима. Блок управления и источник питания имеют единое основание, установленное на задней поверхности гильзы корсета на уровне общего центра масс больного в проекции на фронтальную плоскость. Исполнительный механизм выполнен в виде линейного актуатора, одним концом установленного на гильзе корсета, а другим концом на гильзе бедра. Тазобедренный узел имеет верхнюю и нижние части, на задней поверхности верхней части установлен регулируемый упругий элемент, а на задней поверхности нижней части установлен упор. Шарнирная ось тазобедренного узла в проекции на сагиттальную, поверхность находится на вертикальной оси на уровне тазобедренного сустава. Коленные узлы выполнены полицентрическими и расположены как с наружной, так и с внутренней стороны и находятся на вертикали в проекции на сагиттальную плоскость. Голеностопные узлы расположены как с наружной, так и с внутренней стороны и выполнены из полимерного материала Х-образными имеющими центральное утолщение с вкраплениями наноразмерных частиц по массе до одного процента от массы полимерного материала и расположены на уровне голеностопного сустава на вертикали. Гильза стопы выполнена с индивидуальными выкладками сводов стопы, а передний участок гильзы стопы, начиная от линии, соединяющей центры головок плюсневых костей, выполнен упругим, с возможностью обеспечения движения в плюснефаланговом и межфаланговом сочленениях. Гильза голени и гильза бедра соединены установленной на их передне-боковых плоскостях упругой регулируемой градуированной полиуретановой тягой, в концы которой вкраплены наноразмерные частицы. На боковой наружной поверхности гильзы стопы установлена видеокамера, имеющая устройства звуковой и световой сигнализации и соединенная с блоком управления. Несущие звенья бедра, голени и стопы имеют центры масс, совпадающие с центрами масс соответствующих сегментов нижней конечности больного в проекции на сагиттальную плоскость, а фигурные гильзы корсета, бедра, голени и стопы выполнены индивидуальными разнопрочными из композиционного материала на основе углетканной ленты и ткани на основе нити Русар, а в качестве связующего использован полиуретановый компаунд. Техническим результатом является создание аппарата ортопедического с микропроцессорным управлением, обеспечивающего активизацию двигательных функций в области тазобедренного сустава в процессе ходьбы за счет создания внешних моментов сил, осуществления принудительного сгибания и разгибания нижней конечности в фазе переноса, обеспечения возможности больного сесть и встать, с одновременным снижением энерготрат и требований к мощности, габаритам и массе исполнительных механизмов за счет рациональной схемы построения, встроенных упругих элементов и рационального распределения масс и нагрузок на сегменты конечности, а также обеспечение требуемой ортопедической коррекции, вовлечение остаточных возможностей в процесс движения мышц, обеспечение движений в переднем отделе стопы при ходьбе и повышение безопасности применения аппарата в процессе реабилитации. 6 ил.
Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением, состоящий из корпуса, исполнительного механизма, блока управления с датчиками, источников питания, соединенных между собой коммуникационной сетью, несущих звеньев туловища, бедра, голени и стопы, соединенных тазобедренным шарнирным узлом с осями, имеющим внешний задний и нижний упоры, внешним коленным и голеностопным шарнирными узлами с осями, элементов креплений, отличающийся тем, что несущее звено туловища выполнено в виде фигурной гильзы корсета с внутренними нишами, а несущее звено бедра выполнено в виде фигурной гильзы бедра с внутренними нишами гильзы бедра, а несущее звено голени выполнено в виде фигурной гильзы голени, причем несущее звено стопы выполнено в виде фигурной гильзы стопы с внутренней подошвенной поверхностью, на которой установлена ортопедическая стелька с отверстиями на переднем и заднем участках, при этом датчики выполнены двух типов, одни в виде электромиографических накладных электродов, которые установлены в нишах гильз корсета и бедра, а другие выполнены в виде накладных силоизмерительных датчиков, которые установлены в отверстиях ортопедических стелек на внутренней подошвенной поверхности гильзы стопы, причем все датчики присоединены с помощью клемм к коммуникационной сети, при этом блок управления включает микроконтроллер, инкрементный энкодер, датчик силы тока и интерфейс пользователя, который имеет выключатель питания, индикатор, регулятор скорости ходьбы и три кнопки переключения режима, причем блок управления и источник питания имеют единое основание, установленное на задней поверхности гильзы корсета на уровне общего центра масс больного в проекции на фронтальную плоскость, при этом исполнительный механизм выполнен в виде линейного актуатора, одним концом установленного на гильзе корсета, а другим концом на гильзе бедра, причем тазобедренный узел имеет верхнюю и нижние части, при этом на задней поверхности верхней части установлен регулируемый упругий элемент, а на задней поверхности нижней части установлен упор, причем шарнирная ось тазобедренного узла в проекции на сагиттальную поверхность находится на вертикальной оси на уровне тазобедренного сустава, при этом коленные узлы выполнены полицентрическими и расположены как с наружной, так и с внутренней стороны и находятся на вертикали в проекции на сагиттальную плоскость, а голеностопные узлы расположены как с наружной, так и с внутренней стороны и выполнены из полимерного материала Х-образными имеющими центральное утолщение с вкраплениями наноразмерных частиц по массе до одного процента от массы полимерного материала и расположены на уровне голеностопного сустава на вертикали, причем гильза стопы выполнена с индивидуальными выкладками сводов стопы, а передний участок гильзы стопы, начиная от линии, соединяющей центры головок плюсневых костей, выполнен упругим, с возможностью обеспечения движения в плюснефаланговом и межфаланговом сочленениях, при этом гильза голени и гильза бедра соединены установленной на их передне-боковых плоскостях упругой регулируемой градуированной полиуретановой тягой, в концы которой вкраплены наноразмерные частицы, причем на боковой наружной поверхности гильзы стопы установлена видеокамера, имеющая устройства звуковой и световой сигнализации и соединенная с блоком управления, при этом несущие звенья бедра, голени и стопы имеют центры масс, совпадающие с центрами масс соответствующих сегментов нижней конечности больного в проекции на сагиттальную плоскость, а фигурные гильзы корсета, бедра, голени и стопы выполнены индивидуальными разнопрочными из композиционного материала на основе углетканной ленты и ткани на основе нити Русар, а в качестве связующего использован полиуретановый компаунд.
| US20150335515A1, 26.11.2015 | |||
| US8313448B2, 20.11.2012 | |||
| JP2015139665A, 03.08.2015 | |||
| US2018200878A1, 19.07.2018 | |||
| ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ РАЗГРУЗКИ НИЖНИХ КОНЕЧНОСТЕЙ ЧЕЛОВЕКА | 2014 |
|
RU2556598C1 |

