Область техники
Изобретение относится к области гидрографии, нефтяной, газовой и химической промышленности, в частности к устройствам для получения трёхмерного изображения поверхности дна водоёмов или резервуаров с водой или другими жидкостями.
Уровень техники
Из уровня техники известны гидроакустические приборы для измерения глубины водоёмов, называемые эхолотами (определение эхолота приведено, например, на сайте http://dic.academic.ru/dic.nsf/enc3p/338938, дата обращения 23.03.2017). Принцип действия эхолота основан на измерении времени между излучением звукового сигнала и приёмом эха от излучённого сигнала. Зная скорость распространения акустических волн в среде, определяют пройденный сигналом путь и расстояние до дна.
Для получения акустических изображений донной поверхности речных и морских водоёмов широко используются многолучевые профилографы (многолучевые эхолоты), которые используют горизонтальное перемещение носителя эхолота (судна или катера) по водной поверхности. Многолучевые эхолоты известны из уровня техники и представлены на сайте http://www.ymg.ru/ru/content/оборудование-для-акустической-съёмки (дата обращения 23.03.2017). Многолучевые профилографы позволяют получить изображение профиля дна за счёт использования нескольких лучей, направленных под различными углами к поверхности.
Вместе с тем, во многих практических применениях горизонтальное перемещение профилографа по тем или иным причинам невозможно. В речных водоёмах часто встречаются ситуации, когда из-за насыщенной инфраструктуры горизонтальное перемещение судна-носителя резко ограничено или невозможно. Аналогичная ситуация характерна и для морских и речных водоёмов, покрытых льдом. В нефтяной и химической промышленности широко используются металлические резервуары с диаметрами до 100-120 метров, в которых в результате их эксплуатации накапливаются донные отложения (донные осадки), объём и пространственное распределение которых необходимо оценивать для дальнейшего удаления. Большинство подобных резервуаров являются цельнометаллическими конструкциями с жёсткими крышами различного вида (плоскими, полусферическими или коническими). На крышах подобных резервуаров имеется некоторое число люков, через которые можно опустить акустический профилограф. Поскольку при этом его горизонтальное перемещение невозможно, то для получения изображения донных осадков используется вращение профилографа, которое обеспечивает сканирование всей площади донной поверхности резервуара. Такие многолучевые профилографы содержат многоэлементные антенные решётки, которые с высокой скоростью формируют изображение донной поверхности за счёт электронного формирования лучей в горизонтальной и вертикальной плоскостях в режиме излучения и приёма.
В большинстве случаев сканирование поверхности из одной точки входа не позволяет обеспечить 100% обзор дна резервуара из-за высокого поглощения звука в каком-либо продукте, содержащемся в нефтяном (например) резервуаре и в котором имеет место высокая вязкость. В этом случае приходится вынимать профилограф и устанавливать его в другой возможной точке входа, на что уходит значительное время (в десятки раз большее, чем время получения данных из одной точки входа). В результате общее время обследования резко увеличивается. Например, обследование дна нефтяного резервуара с диаметром 65 и более метров, содержащего сырую нефть с типичной кинематической вязкостью порядка 10-12 сСт (сантистокс), может быть осуществлено из 8-10 точек входа, если они конструктивно доступны.
Наиболее близким техническим решением (прототип) является гидролокационная система, описанная в патенте "Гидролокационная система и метод разведки арктического морского дна" (патент US5173882, дата публикации 22.12.1992). Гидролокационная система для арктической разведки морского дна содержит два преобразователя, прикреплённые к держателю, вертикально удлинённый трубчатый узел, установленный с возможностью поворота с помощью штатива. Поворотом трубчатого узла (поворот обеспечивают за счёт работы двигателя) устанавливают эти преобразователи на заданной глубине в воде, так что преобразователи наклоняются с заданным углом наклона и ориентируется в заданном азимутальном направлении. При этом вращением трубчатого узла можно поворачивать преобразователи и менять азимутальную ориентацию. Также гидролокационная система содержит датчик угла наклона, который может измерять угол наклона преобразователей относительно вертикали (оси труб). Один из преобразователей предназначен для излучения направленных акустических сигналов, а отражённые акустические сигналы, принимаемые обоими преобразователями, преобразуются в электрические сигналы. Эти сигналы обрабатываются вместе с сигналами, указывающими угол наклона и ориентацию преобразователей, для получения данных о рельефе морского дна и глубине. Таким образом, гидролокационная система получает данные о глубине и рельефе дна только в определённом телесном угле, тем самым площадь измеряемого дна ограничена углом обзора преобразователей, при этом перемещение преобразователей в воде происходит путём вращения трубчатого узла. Для увеличения исследуемой площади дна изменяют глубину погружения преобразователей, изменяя количество соединяемых труб.
Недостатком известного технического решения является высокая энергозатратность, связанная с необходимостью вращения трубчатого узла с помощью привода.
Техническим результатом предлагаемого изобретения является снижение энергетических затрат.
Указанный технический результат достигается за счёт того, что, по первому варианту, в акустическом профилографе для получения изображения поверхности дна, содержащем штангу и корпус, причём штанга снабжена ограничителем, расположенным на её конце, корпус снабжён сквозным отверстием, а штанга и сквозное отверстие снабжены резьбами, взаимодействующими друг с другом, кроме того корпус снабжён блоком приёма и передачи акустического сигнала, блоком питания, блоком регулирования плавучести, выключателем и областью размещения электронных приборов, при этом в области размещения электронных приборов помещены переключатель, блок хранения данных об эхо-сигналах, генератор, блок измерения времени, детектор, интегратор, аналого-цифровой преобразователь, причём генератор соединён с переключателем, который соединён с блоком приёма и передачи акустического сигнала и детектором, при том, что генератор и переключатель выполнены с обеспечением формирования импульсно-модулированного сигнала и передачи его на блок приёма и передачи акустического сигнала, а также с обеспечением возможности передачи принятого отражённого сигнала от блока приёма и передачи акустического сигнала в детектор, блок измерения времени выполнен и соединён с обеспечением возможности измерения времени между излучением зондирующего сигнала и приёмом отражённого сигнала, детектор соединён со входом интегратора, выход интегратора соединён со входом аналого-цифрового преобразователя, выход аналого-цифрового преобразователя и выход блока измерения времени соединены с блоком хранения данных об эхо-сигналах, в первом частном случае в устройстве в него дополнительно введены измеритель угла поворота, блок хранения данных об угле поворота, второй блок сравнения, причём выход измерителя угла поворота и выход блока хранения данных об угле поворота соответственно соединены со входами второго блока сравнения, который выполнен с обеспечением возможности сравнения текущего значения от измерителя угла поворота и его предыдущего значения, сохранённого в блоке хранения данных об угле поворота, выход второго блока сравнения соединён с блоком питания, причём блок питания выполнен с обеспечением возможности выключения при получении сигнала, инициированного блоком сравнения при равенстве его входных сигналов, во втором частном случае в него дополнительно введён стопор, выполненный с обеспечением возможности удержания корпуса относительно штанги до момента погружения корпуса в жидкость, по второму варианту, в акустическом профилографе для получения изображения поверхности дна, содержащем штангу и корпус, причём штанга снабжена ограничителем, расположенным на её конце, корпус снабжён сквозным отверстием, а штанга и сквозное отверстие снабжены резьбами, взаимодействующими друг с другом, кроме того корпус снабжён блоком приёма и передачи акустического сигнала, блоком питания, блоком регулирования плавучести, выключателем и областью размещения электронных приборов, при этом в область размещения электронных приборов помещены переключатель, блок хранения данных об эхо-сигналах, генератор, блок измерения времени, детектор, интегратор, аналого-цифровой преобразователь, причём генератор соединён с переключателем, который соединён с блоком приёма и передачи акустического сигнала и детектором, при том, что генератор и переключатель выполнены с обеспечением формирования импульсно-модулированного сигнала и передачи его на блок приёма и передачи акустического сигнала, а также с обеспечением возможности передачи принятого отражённого сигнала от блока приёма и передачи акустического сигнала в детектор, блок измерения времени выполнен и соединён с обеспечением возможности измерения времени между излучением зондирующего сигнала и приёмом отражённого сигнала, детектор соединён со входом интегратора, выход интегратора соединён со входом аналого-цифрового преобразователя, кроме того введены блок хранения порогового значения и первый блок сравнения, причём аналого-цифровой преобразователь соединён с первым блоком сравнения, блок хранения порогового значения также соединён с первым блоком сравнения, который выполнен с обеспечением возможности передачи сигнала, полученного от аналого-цифрового преобразователя, блоку хранения данных об эхо-сигналах, если сигнал от аналого-цифрового преобразователя больше сигнала от блока хранения порогового значения, и передачи блоку хранения данных об эхо-сигналах сигнала равного нулю, если сигнал от аналого-цифрового преобразователя меньше сигнала от блока хранения порогового значения, в первом частном случае устройства в него дополнительно введены измеритель угла поворота, блок хранения данных об угле поворота, второй блок сравнения, причём выход измерителя угла поворота и выход блока хранения данных об угле поворота соответственно соединены со входами второго блока сравнения, который выполнен с обеспечением возможности сравнения текущего значения от измерителя угла поворота и его предыдущего значения, сохранённого в блоке хранения данных об угле поворота, выход второго блока сравнения соединён с блоком питания, причём блок питания выполнен с обеспечением возможности выключения при получении сигнала, инициированного блоком сравнения при равенстве его входных сигналов, во втором частном случае в него дополнительно введён стопор, выполненный с обеспечением возможности удержания корпуса относительно штанги до момента погружения корпуса в жидкость.
Краткое описание чертежей
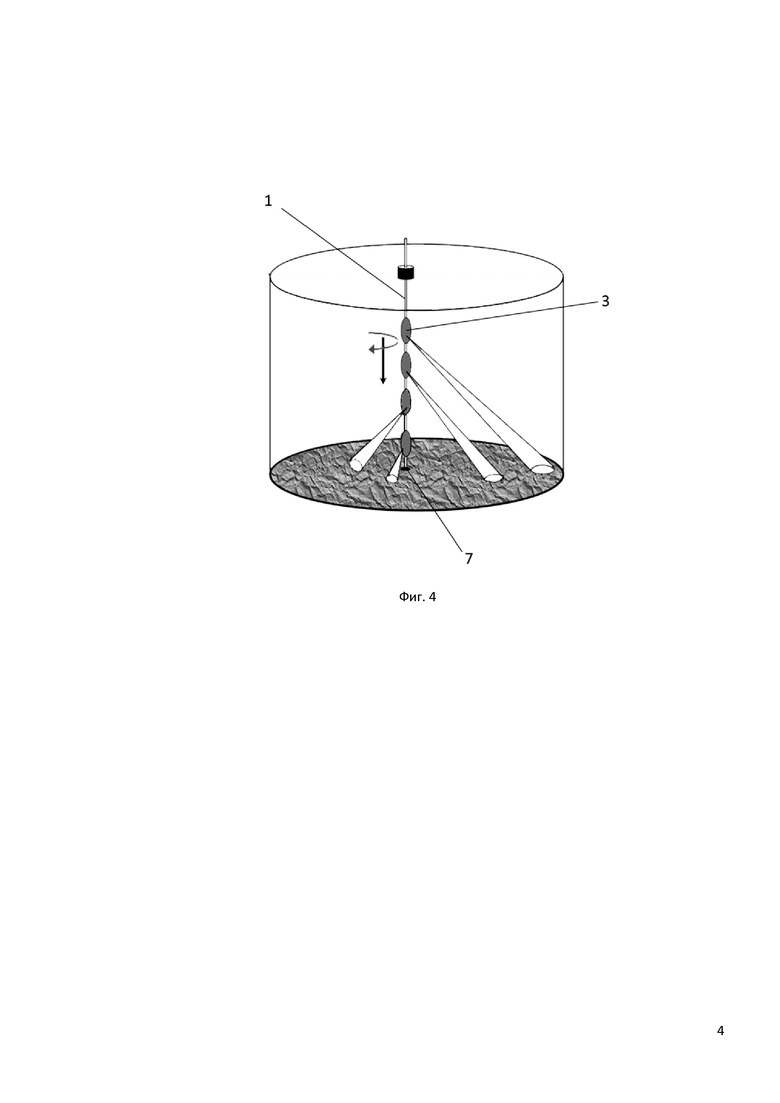
Изобретение поясняется чертежами (фиг. 1-4), где на фиг. 1 представлен условный разрез устройства вертикальной плоскостью, на фиг. 2 представлена блок-схема устройства, на фиг.3 показана возможная траектория движения сканирующего акустического луча по дну и изображение поверхности дна, на фиг.4 изображено пояснение использования устройства.
Раскрытие изобретения
На чертежах обозначены: штанга 1, стопор 2, корпус 3, область размещения электронных приборов 4, блок питания 5, блок приёма и передачи акустического сигнала 6, ограничитель 7, блок регулирования плавучести 8, переключатель 9, первый усилитель 10, детектор 11, интегратор 12, аналого-цифровой преобразователь 13, блок хранения порогового значения 14, первый блок сравнения 15, блок присваивания номера измерений 16, блок хранения значения шума 17, блок хранения данных об эхо-сигналах 18, блок управления 19, измеритель угла поворота 20, второй блок сравнения 21, блок хранения данных об угле поворота 22, реле времени 23, выключатель 24, генератор 25, второй усилитель 26, блок измерения времени 27.
В корпусе 3 устройства размещены блок приёма и передачи акустического сигнала 6, блок питания 5, блок регулирования плавучести 8. Корпус 3 содержит область размещения электронных приборов 4, в которой размещены переключатель 9, первый усилитель 10, детектор 11, интегратор 12, аналого-цифровой преобразователь 13, первый блок сравнения 15, блок хранения порогового значения 14, блок присваивания номера измерений 16, блок хранения значения шума 17, блок хранения данных об эхо-сигналах 18, второй усилитель 26, генератор 25, реле времени 23, второй блок сравнения 21, блок хранения данных об угле поворота 22, измеритель угла поворота 20, блок управления 19, блок измерения времени 27.
Здесь и далее упоминание верхний и нижний соотносятся с учётом направления вектора силы тяжести при обычном для данного устройства расположении в процессе использования. Термины горизонтально и вертикально и их производные понимаются в смысле расположения перпендикулярно вектору силы тяжести или параллельно ему, соответственно.
Корпус 3 акустического профилографа (далее, иногда профилограф) имеет каплевидную форму с утолщением книзу. Каплевидная форма обладает наименьшим коэффициентом гидродинамического сопротивления. Корпус 3 выполнен герметичным. В корпусе 3 выполнено вертикальное сквозное отверстие с внутренней резьбой. Ось сквозного отверстия совпадает с осью симметрии корпуса 3 акустического профилографа. Акустический профилограф может быть размещён на штанге.
Штанга 1 представляет собой деталь цилиндрической формы. Диаметр штанги 1 немного меньше диаметра сквозного отверстия, выполненного в корпусе 3. На боковой поверхности штанги 1 выполнена внешняя резьба, ответная по отношению к внутренней резьбе поверхности сквозного отверстия. Штанга 1 может быть выполнена разборной и может состоять из нескольких соединяемых между собой секций. Сквозное отверстие и штанга 1 выполнены с обеспечением возможности перемещения акустического профилографа вниз по штанге 1 под действием силы тяжести (если штанга 1 размещена вертикально) и одновременным вращением профилографа вокруг собственной оси, которая совпадает с осью сквозного отверстия. Разборная конструкция штанги 1 обеспечивает быстрый подъём профилографа после окончания измерений профиля дна. На нижнем конце штанги 1 размещён ограничитель 7, не позволяющий профилографу продолжать движение. Например, ограничитель 7 может быть выполнен в виде диска, диаметр которого больше диаметра сквозного отверстия. В частном случае шаг внешней резьбы на штанге 1 и шаг ответной резьбы на поверхности сквозного отверстия могут быть изменены.
Основным элементом устройства является блок приёма и передачи акустического сигнала 6. Блок приёма и передачи акустического сигнала 6 размещён в корпусе 3 или конструктивно объединён с ним. Блок приёма и передачи акустического сигнала 6 содержит в том числе пьезоэлектрический электроакустический преобразователь, выполненный и размещённый с обеспечением возможности приёма извне и передачи (излучения) акустического сигнала в окружающую среду. Электроакустический преобразователь представляет собой устройство, преобразующее электрическую энергию в акустическую и наоборот, акустическую в электрическую (электроакустические преобразователи описаны в источнике "Ультразвук. Маленькая энциклопедия", под редакцией И.П.Голяминой, М.: Советская энциклопедия, 1979, с.78). Блок приёма и передачи акустического сигнала 6 закреплён в корпусе 3 таким образом, что направление распространения излучаемого акустического сигнала образует острый угол с направлением вектора силы тяжести (более подробно в отношении размещения блока приёма и передачи акустического сигнала 6 написано далее).
Блок приёма и передачи акустического сигнала 6 соединён с переключателем (ключом) 9. Блок приёма и передачи акустического сигнала 6 может находиться в состоянии, в котором электроакустический преобразователь излучает акустический сигнал (для упрощения такое состояние названо первым состоянием), и состоянии, в котором электроакустический преобразователь принимает акустический сигнал из окружающей среды (для упрощения такое состояние названо вторым состоянием).
Переключатель 9 представляет собой устройство, осуществляющее переключение электрической цепи между двумя состояниями с заданной частотой переключения или моменты времени. Частота переключения устанавливается до начала измерений и зависит от параметров жидкости, водоёма или резервуара, вида излучаемого акустического сигнала, скорости звука в жидкости. Переключение может осуществляться необходимое для правильной работы акустического профилографа число раз. Первому положению переключателя 9 соответствует первое состояние электрической цепи, при котором обеспечивается прохождение электрического сигнала от выхода второго усилителя 26 в блок приёма и передачи акустического сигнала 6. Второму положению переключателя 9 соответствует второе состояние электрической цепи, при котором обеспечивается прохождение электрического сигнала, соответствующего акустическому эхо-сигналу, принятому блоком приёма и передачи акустического сигнала 6, от блока приёма и передачи акустического сигнала 6 ко входу первого усилителя 10. Переключатель 9 соединён со входом первого усилителя 10, выходом второго усилителя 26, блоком приёма и передачи акустического сигнала 6. Первое положение переключателя 9 обеспечивает соединение блока приёма и передачи акустического сигнала 6 с выходом второго усилителя 26, второе положение переключателя 9 обеспечивает соединение блока приёма и передачи акустического сигнала 6 со входом первого усилителя 10. Переключатель 9 снабжён выходом, соединённым со входом первого усилителя 10, входом, соединённым с выходом второго усилителя 26, и входом-выходом, соединённым с блоком приёма и передачи акустического сигнала 6. Переключатель 9 выполнен с обеспечением возможности внесения в него информации о значении частоты переключения или времени переключения. Информация о частоте переключения может передаваться от блока управления 19 или от внешнего устройства перед началом работы акустического профилографа.
Первый усилитель 10 и второй усилитель 26 осуществляют усиление входящих в них электрических сигналов с последующей передачей усиленных электрических сигналов для дальнейшей работы устройства. Выход первого усилителя 10 соединён со входом детектора 11 и входом блока измерения времени 27, вход второго усилителя 26 соединён с выходом генератора 25. Первый усилитель 10 осуществляет усиление электрического сигнала, полученного от блока приёма и передачи акустического сигнала 6 через переключатель 9, находящийся во втором положении, и передачу усиленного сигнала в детектор 11. Второй усилитель 26 осуществляет усиление полученного от генератора 25 сигнала и его передачу через находящийся в первом положении переключатель 9 в блок приёма и передачи акустического сигнала 6.
Детектор 11 представляет собой устройство, осуществляющее детектирование электрического сигнала. Детектирование представляет собой процесс преобразования электромагнитного колебания для получения напряжения или тока, величина которого определяется параметрами колебания, с целью извлечения информации, содержащейся в изменениях этих параметров (определение детектирования представлено документе "Радиосвязь. Термины и определения" ГОСТ 24375-80). Детектор 11 может осуществлять квадратичное детектирование амплитудно-модулированного сигнала, который подаётся на его вход. На выходе детектора 11 сигнал будет пропорционален квадрату амплитуды модуляции сигнала. Вход детектора 11 соединён с первым усилителем 10, выход детектора 11 соединён со входом интегратора 12. Детектор 11 выполнен с обеспечением возможности получения электрического сигнала из первого усилителя 10, выделения электрического сигнала, пропорционального квадрату амплитуды модуляции входящего в детектор 11 сигнала и последующей передачей полученного электрического сигнала в интегратор 12.
Интегратор 12 или, по-другому, интегрирующее устройство, представляет собой вычислительное устройство для определения интеграла от входных переменных величин (определение интегрирующего устройства приведено, например, на сайте http://dic.academic.ru/dic.nsf/bse/90735, дата обращения 12.05.2017). Интегратор 12 осуществляет интегрирование по времени получаемого с выхода детектора 11 напряжения электрического сигнала, то есть может являться интегрирующим усилителем. При этом интервал времени, по которому осуществляется интегрирование, равен времени длительности входящего в интегратор 12 электрического сигнала. На выходе интегратора 12 будет электрический сигнал, напряжение которого пропорционально интегралу по времени от входящего электрического сигнала. Выход интегратора 12 соединён с аналого-цифровым преобразователем 13.
Аналого-цифровой преобразователь 13 (далее иногда АЦП 13) представляет собой функциональный элемент, осуществляющий преобразование аналоговой переменной величины в цифровую величину (определение АЦП 13 представлено, например, в документе "Аналоговая и аналого-цифровая вычислительная техника. Термины и определения" ГОСТ 18421-93). АЦП 13 выполнен с обеспечением возможности преобразования напряжения получаемого электрического сигнала в двоичный машинный код и дальнейшей выдачи соответствующего цифрового сигнала. При этом каждому значению напряжения соответствует единственная последовательность символов двоичного машинного кода, которая представляет собой цифровой сигнал. Вход АЦП 13 соединён с выходом интегратора 12, выход АЦП 13 соединён с первым входом первого блока сравнения 15.
Блок хранения порогового значения 14 представляет собой запоминающее устройство, осуществляющее хранение информации о возможном значении радиоэлектронного шума (флуктуаций напряжения) на данных рабочих частотах электронных приборов акустического профилографа. Информация в блоке хранения порогового значения 14 хранится в виде последовательности символов двоичного машинного кода. Блок хранения порогового значения 14 выполнен с обеспечением возможности внесения в него информации о значении порогового значения радиоэлектронного шума на частоте работы акустического профилографа. Информация о значении порогового значения радиоэлектронного шума может быть получена от блока управления 19 или от внешнего устройства перед началом работы акустического профилографа. Выход блока хранения порогового значения 14 соединён со вторым входом первого блока сравнения 15.
Первый блок сравнения 15 представляет собой электронный прибор, осуществляющий сравнение числовых значений, информация о которых закодирована в цифровых сигналах, принятых на первый и второй вход первого блока сравнения 15. Первый блок сравнения 15 осуществляет вывод цифрового сигнала, в котором закодировано большее числовое значение из принятых на первый вход и второй входы числовых значений. Вывод цифрового сигнала осуществляют на выход первого блока сравнения 15. Выход первого блока сравнения 15 соединён с первым входом блока управления 19.
Также в области размещения электронных приборов 4 размещён блок присваивания номера измерений 16. Блок присваивания номера измерений 16 представляет собой устройство, в состав которого входит ячейка памяти. Ячейка(и) памяти выполнена с обеспечением возможности хранения данных числового формата и изменения сохранённых в ячейку данных. Блок присваивания номера измерений 16 выполнен с возможностью осуществления механизма присваивания. Блок присваивания номера измерений 16 фактически является счётчиком от единицы с возможностью сброса до единицы. Номер измерения равен порядковому номеру измерения, считая от старта работы устройства, т.е. принятые устройством сигналы, соответствующие первому излучённому блоком приёма-передачи акустического сигнала, имеют первый номер и т.д. Таким образом номер измерения равен количеству соответствующих переключений переключателя 9 во второе положение после включения устройства. Присваивание следующего (большего на единицу) значения (номера измерений) осуществляют при получении команды от блока управления 19 на присваивание следующего значения (номера измерений). Сбрасывание до единицы осуществляют при получении команды от блока управления 19 на присваивание единицы или при отключении питания. Вход блока присваивания номера измерений 16 соединён с первым выходом блока управления 19, выход блока присваивания номера измерений 16 соединён с первым входом блока хранения данных об эхо-сигналах 18.
Также в состав устройства входит блок хранения значения шума 17. Блок хранения значения шума 17 представляет собой запоминающее устройство, осуществляющее хранение числового нуля или любого другого числа, которое необходимо учитывать, если пороговое значение радиоэлектронного шума больше значения, полученного с выхода АЦП 13. Вход блока хранения значения шума 17 соединён со вторым выходом блока управления 19, выход блока хранения значения шума 17 соединён со вторым входом блока хранения данных об эхо-сигналах 18.
Блок управления 19 представляет собой контроллер, осуществляющий обработку входящей в него информации и отправление команд. Блок управления 19 выполнен с обеспечением возможности получения информации от первого блока сравнения 15 и второго блока сравнения 21 и подачи команд блоку присваивания номера измерений 16, блоку хранения значения шума 17, блоку хранения данных об эхо-сигналах 18, блоку питания 5, блоку хранения данных об угле поворота 22. В частном случае блок управления 19 выполнен с обеспечением возможности подачи команд генератору 25 и переключателю 9.
В состав устройства входит генератор 25. Генератор 25 представляет собой устройство, осуществляющее генерацию периодического электрического сигнала определённого типа, длительности и скважности. Генератор 25 осуществляет генерирование амплитудно-модулированного электрического сигнала. Генератор 25 выполнен с обеспечением возможности внесения в него информации о типе, длительности, скважности, глубине модуляции, частоте (или периоде) несущего сигнала и частоте (или периоде) огибающего сигнала (частоте или периоде модуляции). Тип, длительность, скважность, глубина модуляции, частота (или период) несущего сигнала и частота (или период) огибающего сигнала (частота или период модуляции) зависят от параметров жидкости, резервуара, окружающей среды. Данные параметры рассчитывают перед началом работы акустического профилографа. Данная информация может быть получена от блока управления 19 или от внешнего устройства. Выход генератора 25 соединён со входом второго усилителя 26. Генератор 25 и/или переключатель 9 выполнены с обеспечением формирования импульсного-модулированного сигнала.
В состав устройства также входит блок измерения времени 27. Блок измерения времени 27 представляет собой устройство измерения времени между сигналом с первого входа блока измерения времени 27 и сигналом со второго входа блока измерения времени 27. Данное время фактически представляет собой время распространения акустического сигнала в жидкости, так как время распространения электрического сигнала по электронной цепи мало по сравнению с характерным временем распространения акустического сигнала в жидкости. В состав блока измерения времени 27 может входить набор элементов, осуществляющих задержку сигнала с выхода генератора 25 на некоторые фиксированные отрезки времени. Затем в блоке измерения времени 27 осуществляют сравнение между "задержанным" сигналом и принятым сигналом с выхода первого усилителя 10. Зная номер этого элемента, можно определить время задержки между сигналами. Описанный способ измерения времени между сигналами известен из уровня техники и описан, например, в источнике "Радиотехнические цепи и сигналы", С.И.Баскаков, М.: Высшая школа, 2-е издание. – с.68. На выход блока измерения времени 27 осуществляют выдачу информации о времени задержки между сигналами с первого входа и второго входа. По измеренному времени и известной скорости звука в жидкости может быть рассчитано расстояние до поверхности, от которой был отражён акустический сигнал. Первый вход блока измерения времени 27 соединён с генератором 25, второй вход соединён с выходом первого усилителя 10, выход соединён с третьим входом блока управления 19. Также блок измерения времени 27 может быть соединён с блоком хранения данных об эхо-сигналах 18.
Блок хранения данных об эхо-сигналах 18 представляет собой запоминающее устройство, осуществляющее хранение значений номеров измерений и два числовых значения для каждого номера измерений. Первое числовое значение представляет собой значение напряжения электрического сигнала, оцифрованное в АЦП 13. Напряжение данного электрического сигнала есть интеграл по времени от квадрата глубины модуляции электрического сигнала, преобразованного в блоке приёма и передачи акустического сигнала 6 из принятого акустического эхо-сигнала. Также первое числовое значение может представлять собой некоторое значение, которое хранят в блоке хранения значения шума 17. Второе числовое значение представляет собой результат измерения времени блоком измерения времени 27. Второе числовое значение представляет собой время распространения акустического сигнала в жидкости. Каждому номеру измерений соответствует единственное первое числовое значение и единственное второе числовое значение. Блок хранения данных об эхо-сигналах 18 может быть выполнен в виде постоянного запоминающего устройства или оперативного запоминающего устройства. Блок хранения данных об эхо-сигналах 18 выполнен с обеспечением возможности соединения с внешним устройством (персональным компьютером) и передачи данных. Первый вход блока хранения данных об эхо-сигналах 18 соединён с выходом блока присваивания номера измерений 16, второй вход блока хранения данных об эхо-сигналах 18 соединён с выходом блока хранения значения шума 17 и третьим выходом блока управления 19. Третий вход блока хранения данных об эхо-сигналах 18 соединён с шестым выходом блока управления 19.
Измеритель угла поворота 20 представляет собой устройство, осуществляющее измерение азимута (азимутального угла). Азимут – угол между плоскостью меридиана точки наблюдения и вертикальной плоскостью, проходящей через эту точку и наблюдаемый объект (определение азимутального угла приведено, например, на сайте http://dic.academic.ru/dic.nsf/enc3p/48922, дата обращения 18.05.2017). Измеритель угла поворота 20 выполнен с обеспечением возможности вывода цифровой информации о значении азимутального угла. Измеритель угла поворота 20 может представлять собой устройство, в состав которого входит гироскоп. Измеритель угла поворота 20 необходим для измерения угла поворота акустического профилографа относительно его собственной оси вращения. Измеритель угла поворота 20 выполнен с обеспечением возможности внесения в него информации о первоначальном угле поворота устройства. Информация о первоначальном угле поворота может быть получена от блока управления 19 или от внешнего устройства перед началом работы акустического профилографа. Выход измерителя угла поворота 20 соединён с первым входом второго блока сравнения 21.
Блок хранения данных об угле поворота 22 представляет собой запоминающее устройство, осуществляющее хранение информации о значении угла поворота измерителя угла поворота 20. Информация в блоке хранения данных об угле поворота 22 хранится в виде последовательности символов двоичного машинного кода. Вход блока хранения данных об угле поворота 22 соединён с четвёртым выходом блока управления 19. Выход блока хранения данных об угле поворота 22 соединён со вторым входом второго блока сравнения 21.
Все блоки устройства, осуществляющие функцию хранения, могут быть конструктивно объединены в один блок.
Второй блок сравнения 21 представляет собой электронный прибор, осуществляющий сравнение числовых значений, информация о которых закодирована в цифровых сигналах, принятых на первый и второй вход второго блока сравнения 21. Второй блок сравнения 21 осуществляет вывод цифрового сигнала, в котором закодировано большее числовое значение из принятых на первый и второй входы числовых значений или ноль, если принятые на первый и второй входы числовые значения совпадают. Вывод цифрового сигнала осуществляется на выход второго блока сравнения 21. Выход второго блока сравнения 21 соединён со вторым входом блока управления 19.
В частном случае измеритель угла поворота 20, блок хранения данных об угле поворота 22, второй блок сравнения 21 могут быть заменены на устройство, осуществляющее измерение угла поворота относительно предыдущего положения акустического профилографа относительно оси вращения.
Все электронные приборы, требующие для своей работы электрическую энергию, подключены к блоку питания 5. Подключение выполнено с обеспечением работоспособности каждого из блоков. Блок питания 5 подключён по крайней мере к первому усилителю 10, второму усилителю 26, генератору 25, блоку управления 19, детектору 11, интегратору 12, АЦП 13, измерителю угла поворота 20, блоку хранения порового значения, блоку хранения значения шума 17, блоку хранения данных об эхо-сигналах 18, блоку измерения времени 27. Блок питания 5 соединён с выключателем 24, реле времени 23, пятым выходом блока управления 19. Блок питания 5 может представлять собой аккумулятор.
Выключатель 24 представляет собой прибор, который осуществляет включение и выключение блока питания 5. Выключатель 24 может быть выполнен в виде кнопки, при нажатии на которую осуществляется замыкание электрической цепи. Выключатель 24 выполнен с обеспечением возможности выключения блока питания 5, например, при получении команды от блока управления 19. Выключатель 24 может быть размещён на корпусе 3 или внутри него.
Реле времени 23 представляет собой устройство, контакты которого замыкаются (размыкаются) с некоторой задержкой во времени после получения управляющего сигнала (определение реле времени 23 приведено, например, на сайте http://dic.academic.ru/dic.nsf/enc3p/253886, дата обращения 19.05.2017). Реле времени 23 служит для подачи питания от блока питания 5 с некоторой временной задержкой после нажатия на кнопку включения.
В состав устройства также может входить стопор 2. Стопор 2 представляет собой деталь или устройство для фиксации частей механизма в определённом положении (определение стопора 2 приведено, например, на сайте http://dic.academic.ru/dic.nsf/enc3p/282362, дата обращения 25.05.2017). Стопор 2 может быть размещён между штангой 1 и внутренней поверхностью сквозного отверстия. Стопор 2 выполнен с обеспечением возможности временной фиксации положения акустического профилографа относительно штанги 1. Стопор 2 осуществляют фиксацию профилографа относительно штанги 1 по крайней мере до полного погружения акустического профилографа в жидкость.
Блок регулирования плавучести 8 может представлять собой частично ограниченный объём в корпусе 3 акустического профилографа. При этом в данном объёме может находится вещество, количество которого можно изменять. Регулированием количества вещества внутри объёма регулируют полную массу акустического профилографа. Блок регулирования плавучести 8 необходим для обеспечения постоянной скорости погружения акустического профилографа в жидкости, поскольку её плотность может быть различной.
Осуществление изобретения
В случае использования указанных выше элементов и средств, изобретение реализуется следующим образом.
Штангу 1 с ограничителем 7, корпус 3, стопор 2, блок регулирования плавучести 8 и все блоки устройства изготавливают отдельно. Некоторые блоки, например, первый блок сравнения 15, второй блок сравнения 21, блок управления 19 могут быть конструктивно объединены в один блок. В силу того, что все блоки и детали устройства содержат целый ряд элементов различного типа действия – их изготовление требует применения различных технологий и методов.
Например, изготавливают штангу 1 из металла. Штангу 1 может быть изготовлена технологией прокатки. На штанге 1 нарезают внешнюю резьбу, например, с помощью плашки, закрепляют ограничитель 7, например, приваривают его к штанге 1.
Далее изготавливают корпус 3 каплевидной формы, например, отливают из металла или пластмассы, выполняют в нём сквозное отверстие, например, высверливанием. На внутренней поверхности сквозного отверстия изготавливают внутреннюю резьбу, например, с помощью метчика. Внешняя резьба на боковой поверхности штанги 1 выполнена ответной по отношению к внутренней резьбе поверхности сквозного отверстия. В корпусе 3 выполняют дополнительные углубления для размещения блока питания 5, блока приёма и передачи акустического сигнала 6, блока регулирования плавучести 8. Углубление для размещения в нём блока приёма и передачи акустического сигнала 6 выполняют в утолщённой части корпуса 3. Размещают в соответствующие углубления блок питания 5, блок приёма и передачи акустического сигнала 6, блок регулирования плавучести 8.
Блок приёма и передачи акустического сигнала 6 размещают таким образом, чтобы направление излучения акустического сигнала образовывало с осью сквозного отверстия острый угол. Это возможно, например, если расположить профилограф таким образом, чтобы уширение корпуса 3 было снизу, а ось сквозного отверстия совпадала с направлением вектора силы тяжести. Крепление блока приёма и передачи акустического сигнала 6 может быть осуществлено так, чтобы направление излучения акустического сигнала можно было менять в вертикальной плоскости.
Также в корпусе 3 изготавливают углубление, в которой будут размещены электронные приборы. Данное углубление представляет собой область размещения электронных приборов 4. В области размещения электронных приборов 4 размещают переключатель 9, первый усилитель 10, детектор 11, интегратор 12, аналого-цифровой преобразователь 13, первый блок сравнения 15, блок хранения порогового значения 14, блок присваивания номера измерений 16, блок хранения значения шума 17, блок хранения данных об эхо-сигналах 18, второй усилитель 26, генератор 25, реле времени 23, второй блок сравнения 21, блок хранения данных об угле поворота 22, измеритель угла поворота 20, блок управления 19, блок измерения времени 27.
На корпусе 3 акустического профилографа закрепляют выключатель 24 и размещают разъём. Разъём необходим для передачи данных из блока хранения данных об эхо-сигналах 18 на внешнее устройство. Также через разъём вносят информацию в блок управления 19 или в другие блоки устройства. Осуществляют электрическое соединение между блоками устройства в соответствии с блок-схемой на фиг. 2.
Для получения изображения поверхности дна выполняют следующую последовательность действий. Сначала, исходя из параметров среды (например, плотности, вязкости, скорости звука), подбирают массу вещества в блоке регулирования плавучести 8. Подбор осуществляют таким образом, чтобы акустический профилограф опускался, вращаясь вокруг штанги 1, под действием силы тяжести в данной жидкости равномерно (с постоянной скоростью погружения). Для предварительных оценок скорость погружения профилографа в жидкость можно оценить по приближенной формуле v=0,22r2g(ρ- ρ0)/η, где r – радиус эквивалентной сферы каплевидного корпуса 3, g – ускорение свободного падения, ρ – плотность материала корпуса 3, ρ0 - плотность жидкости, η – динамическая вязкость жидкости. Для реальных условий эксплуатации профилографа, зная плотность и вязкость среды, массу прибора и диаметр резервуара, подбирают массу вещества в блоке регулирования плавучести 8 таким образом, чтобы скорость погружения составляла бы от 0,2 м/с до 5 м/с.
Исходя из параметров жидкости и резервуара, рассчитывают параметры акустического сигнала, необходимые для корректной работы акустического профилографа. Параметры акустического сигнала зависят, например, от скорости звука в жидкости, размеров резервуара. Для определения скорости звука в воде и других жидкостях существуют как эмпирические формулы, так и специальные таблицы. Параметры акустического сигнала соответствуют параметрам электрического сигнала, который будет генерировать генератор 25. Скважность подбирается таким образом, чтобы отражённый акустический сигнал мог быть принят блоком приёма и передачи акустического сигнала 6, то есть отражённый акустический сигнал не попадал в момент излучения акустического сигнала блоком приёма и передачи акустического сигнала 6.
Через разъём вносят соответствующие данные в блок управления 19, который после включения питания распределяет информацию между остальными блоками. В частном случае сразу вносят соответствующую информации в каждый из блоков. Например, вносят информацию об уровне излучения, типе и длительности каждого импульса, скважности излучения генерируемого электрического сигнала в генератор 25. В реле времени 23 вносят информацию о значении времени задержки. В блок хранения порогового значения 14 вносят пороговое значение. Также в блок хранения данных об угле поворота 22 вносят первоначальный угол поворота.
Далее блок питания 5, а также все электрические соединения и все блоки устройства, которым для своей работы необходима электрическая энергия, изолируют от возможного контакта с жидкостью любым известным способом, например, герметично закупоривают отверстия, в которых размещены блоки. Закрывают разъём заглушкой или любым другим способом, предотвращая попадание жидкости на контакты разъёма, затем опускают штангу 1 в жидкость ограничителем 7 вниз. Если штанга 1 выполнена разборной, то соединяют необходимое количество секций между собой. Устанавливают профилограф на штанге 1 или на верхней секции штанги 1 и фиксируют с помощью стопора 2 или фала.
Далее нажимают на выключатель 24, который включает блок питания 5. После включения блока питания 5 питание на электронные блоки подаётся через некоторое время задержки, обеспечиваемое реле времени 23, которое начинает отсчёт времени, через которое питание будет подано на блоки устройства, требующие для своей работы электрическую энергию.
Далее опускают штангу 1 до конца, на необходимую глубину. Устанавливают штангу 1 вертикально без возможности перемещения относительно дна любым известным способом. Например, закрепляют штангу 1 на крышке резервуара.
Далее расфиксируют стопор 2, и акустический профилограф начинает погружение в жидкости. В частном случае стопор 2 получает команду на прекращение фиксации положения профилографа относительно штанги 1. В частном случае расфиксация стопора 2 может происходить после полного погружения профилографа в жидкость. После расфиксации погружение профилографа осуществляется практически с постоянной скоростью, при этом происходит перемещение внутренней резьбы сквозного отверстия относительно внешней резьбы штанги 1. Данное перемещение обеспечивает вращение профилографа вокруг штанги 1 и вокруг собственной оси. Профилограф одновременно движется вниз с постоянной скоростью и вращается вокруг собственной оси. Так как блок приёма и передачи акустического сигнала 6 расположен на некотором расстоянии от оси вращения профилографа, траекторией движения блока приёма и передачи акустического сигнала 6 будет винтовая линия. Вышесказанное проиллюстрировано на фиг.4. Стрелками показаны движение профилографа вниз и вращение вокруг собственной оси. При этом на фиг.4 показаны последовательные положения корпуса 3 профилографа по мере его опускания по штанге 1. Изменение направления излучения акустического сигнала в зависимости от изменения положения профилографа условно изображено при помощи лучей, направленных ко дну резервуара. На дне резервуара условно показаны отложения.
Через время задержки блок питания 5 подаёт питание на электронные приборы. После включения питания и расфиксации стопора 2 акустический профилограф работает автономно. Акустический профилограф начинает сканировать поверхность дна следующим образом. Если переключатель 9 находится не в первом положении, переключают переключатель 9 в первое положение. Переключение переключателя 9 может происходить после подачи команды на переключение от блока управления 19. Генератор 25 генерирует амплитудно-модулированный ограниченный во времени электрический сигнал, который усиливает второй усилитель 26. Также сигнал с выхода генератора 25 подают на первый вход блока измерения времени 27. Усиленный вторым усилителем 26 сигнал подают в блок приёма и передачи акустического сигнала 6, который преобразует электрический сигнал в акустический и излучает его. Излучённый акустический сигнал распространяется в некотором телесном угле. Направление излучения образует острый угол с направлением вектора силы тяжести. Далее переключают переключатель 9 во второе положение. Переключение переключателя 9 может происходить после подачи команды на переключение от блока управления 19 или независимо от него с некоторой постоянной частотой переключения (то есть через некоторое заданное время). Акустический сигнал распространяется в жидкости до границы раздела сред и частично отражается от неё. Граница раздела сред представляет собой границу между двумя средами с различными волновыми сопротивлениями. Границей раздела может быть граница жидкости и твёрдого вещества или двух жидкостей разных плотностей. Часть отражённого от границы раздела сред эхо-сигнала распространяется в направлении блока приёма и передачи акустического сигнала 6 и доходит до него. Блок приёма и передачи акустического сигнала 6 принимает отражённый акустический эхо-сигнал.
Блок приёма и передачи акустического сигнала 6 преобразует принятый акустический эхо-сигнал в электрический сигнал. После прохождения переключателя 9 электрический сигнал подают на вход первого усилителя 10. Через определённое время (период переключения) переключатель 9 переводят в первое положение.
Первый усилитель 10 усиливает электрический сигнал и подаёт усиленный сигнал на второй вход блока измерения времени 27. Блок измерения времени 27 сравнивает сигнал с выхода генератора 25 и сигнал с выхода первого усилителя 10. При совпадении сигналов блок измерения времени 27 выдаёт в блок управления 19 время задержки между поданными на первый и второй вход блока измерения времени 27 сигналами.
Также первый усилитель 10 усиливает электрический сигнал и подаёт усиленный сигнал на вход детектора 11. Детектор 11 осуществляет квадратичное детектирование амплитудно-модулированного сигнала, который подают на его вход. На выходе детектор 11 выдаёт сигнал, пропорциональный квадрату амплитуды модуляции сигнала. Сигнал с выхода детектора 11 передают на вход интегратора 12. Интегратор 12 интегрирует по времени напряжение полученного на вход интегратора 12 сигнала. На выходе интегратор 12 выдаёт электрический сигнал, напряжение которого пропорционально интегралу по времени от входящего электрического сигнала. Сигнал с выхода интегратора 12 подают на вход АЦП 13.
АЦП 13 преобразует напряжение принятого на вход электрического сигнала в двоичный машинный код и выдаёт соответствующий цифровой сигнал на выход АЦП 13. Сигнал с выхода АЦП 13 подают на первый вход первого блока сравнения 15. Первый блок сравнения 15 сравнивает принятое на первый вход значение со значением, принятым на второй вход. На второй вход подают пороговое значение, которое хранят в блоке хранения порогового значения 14. Если значение на первом входе больше значения на втором входе (порогового), то на выход первого блока сравнения 15 будет передан сигнал с первого входа. Если меньше - со второго входа. Сигнал с выхода первого блока сравнения 15 подают на первый вход блока управления 19. В частном случае АЦП 13 может быть включён в цепь после первого усилителя 10. То есть вход АЦП 13 соединён с входом первого усилителя 10, а выход АЦП 13 соединён со входом детектора 11. В таком случае детектирование, интегрирование по времени и сравнение с пороговым значением осуществляется для цифрового сигнала, полученного с выхода АЦП 13. В таком случае детектор 11, интегратор 12 и первый блок сравнения 15 фактически осуществляют пороговое детектирование электрического сигнала, полученного с выхода АЦП 13.
Блок управления 19 выдаёт команду блоку присваивания номера измерений 16 на выдачу текущего значения в блок хранения данных об эхо-сигналах 18. Далее блок управления 19 выдаёт команду на присваивание следующего номера измерений (большего на единицу). Если в блок управления 19 на первый вход передано некоторое значение, большее порогового, то блок управления 19 выдаёт (направляет) данное значение в блок хранения данных об эхо-сигналах 18. Если в блок управления 19 на первый вход передано пороговое значение, то блок управления 19 подаёт команду блоку хранения значения шума 17 на выдачу некоторого числового значения, например, нуля в блок хранения данных об эхо-сигналах 18. Блок управления 19 получает время распространения сигнала и передаёт его на третий вход блока хранения данных об эхо-сигналах 18.
Блок хранения данных записывает значение номера измерения, принятое на первый вход, и значение, принятое на второй вход. Также блок хранения данных об эхо-сигналах 18 записывает значение времени, принятое на третий вход. При этом каждому номеру измерения соответствует единственное значение, которое было принято на второй вход, и единственное значение времени, которое было принято на третий вход. Одновременно с этим измеритель угла поворота 20 измеряет азимутальный угол и передаёт измеренное значение на первый вход второго блока сравнения 21.
Блок хранения данных об угле поворота 22 выдаёт хранящееся в нём значение на выход блока хранения данных об угле поворота 22. Второй блок сравнения 21 сравнивает значения, переданные на первый и второй входы, и выдаёт большее значение на выход. Если значения совпадают, то второй блок сравнения 21 выдаёт на свой выход ноль.
Если принятое на второй вход блока управления 19 значение отлично от нуля (т.е. профилограф вращается), то блок управления 19 подаёт команду блоку хранения данных об угле поворота 22 на присваивание принятого на второй вход значения и само это значение. Если переключение переключателя 9 происходит после получения команды от блока управления 19, то блок управления 19 подаёт команду переключателю 9 на переключение в первое положение. Если генерация электрического сигнала в генераторе 25 происходит после получения команды от блока управления 19, то блок управления 19 подаёт команду генератору 25 на генерацию электрического сигнала.
Если принятое на второй вход блока управления 19 значение равно нулю (то есть угол поворота профилографа относительно предыдущего измерения равен нулю), то блок управления 19 выдаёт команду блоку питания 5 или выключателю 24 на отключение питания. Азимутальный угол перестаёт изменяться, когда профилограф достигает ограничителя 7 и прекращает движение. В частном случае в нижней части корпуса 3 профилографа установлен размыкатель. Когда происходит касание профилографом ограничителя 7, срабатывает контакт размыкателя, который отключает электропитание. Также блок управления 19 перед подачей команды на отключение питания может подавать команду блоку присваивания номера измерений 16 на присваивание единицы (то есть сброса до единицы).
Отключение питания при отсутствии изменения азимутального угла обеспечивает отключение питания в нижней точке траектории движения профилографа, что позволяет снизить энергетические затраты и уменьшает количество хранящихся данных в блоке хранения данных об эхо-сигналах 18. Аналогично отключение питания при касании корпуса 3 и ограничителя 7 позволяет снизить энергетические затраты и уменьшает количество хранящихся данных в блоке хранения данных об эхо-сигналах.
При сканировании поверхности дна блок приёма и передачи акустического сигнала 6 движется по винтовой линии с постоянной скоростью погружения. Если дно резервуара плоское, то траектория движения области пересечения сканирующего акустического луча и плоскости резервуара будет представлять спираль. Траектория перемещения сканирующего акустического луча и условное изображение поверхности дна представлены на фиг. 3.
Включение в состав устройства первого блока сравнения 15, блока хранения порогового значения 14 и блока хранения значения шума 17 позволяет повысить отношение сигнал/шум, так как в случае отсутствия принятия эхо-сигнала блоком приёма и передачи акустического сигнала 6 в блок хранения данных об эхо-сигналах 18 будет записано одинаковое значение, например, ноль.
После отключения питания вынимают акустический профилограф из жидкости, подсоединяют через разъём к персональному компьютеру и передают на персональный компьютер данные, записанные в блоке хранения данных об эхо-сигналах 18. Так как известна скорость погружения профилографа в жидкости и первоначальное положение профилографа, можно однозначно определить азимутальный угол. Зная время распространения акустического сигнала, скорость звука в жидкости и угол между направлением излучения акустического сигнала и осью профилографа, можно определить расстояние до отражающей поверхности от оси профилографа. Если знать длину штанги 1, можно определить расстояние от отражающей поверхности до плоскости, перпендикулярной оси штанги 1 и проходящей через нижнюю поверхность ограничителя 7. Азимутальный угол, расстояние от оси профилографа, расстояние от плоскости, перпендикулярной оси штанги 1 и проходящей через нижнюю поверхность ограничителя 7 однозначно определяют пространственные координаты точки, от которой отразился акустический сигнал. По этой совокупности точек отражения далее строят трёхмерное изображение поверхности дна.
Таким образом, выполнение акустического профилографа описанным выше образом обеспечивает упрощение конструкции и снижение энергетических затрат. Вращение корпуса с установленными внутри него элементами обеспечивается за счёт его движения по резьбе под действием силы тяжести. Вследствие этого отсутствует необходимость наличия в устройстве двигателя, который должен обеспечивать вращение профилогрофа. С учётом этого можно сделать вывод, что упрощение конструкции обеспечено отсутствием необходимости в наличии в устройстве привода (в т.ч. двигателя). Для работы привода необходим дополнительный подвод энергии, а т.к. привод отсутствует, то дополнительная энергия не требуется и энергетические затраты по сравнению с прототипом снижаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система обеспечения посадки вертолёта (варианты) | 2017 |
|
RU2674283C1 |
| Способ и устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах | 2019 |
|
RU2705943C1 |
| Устройство ультразвуковой визуализации объектов в жидких средах (варианты) | 2017 |
|
RU2650348C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2308228C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА ШЛАМОВЫХ ОТЛОЖЕНИЙ В РЕЗЕРВУАРАХ С СЫРОЙ НЕФТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2524416C2 |
| СПОСОБ КОНТРОЛЯ ПЕРЕМЕШИВАНИЯ СРЕДЫ В ВИДЕ СЫРОЙ НЕФТИ В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2522180C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ СТРУКТУР МОЗГА ЧЕРЕЗ ТОЛСТЫЕ КОСТИ ЧЕРЕПА | 2015 |
|
RU2636851C2 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука и измерения его координат | 2021 |
|
RU2770564C1 |
| Способ ультразвукового контроля толщины стенки трубопровода | 2018 |
|
RU2687086C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |



Акустический профилограф для получения изображения поверхности дна. Изобретение относится к области гидрографии, нефтяной, газовой и химической промышленности, в частности к устройствам для получения изображения поверхности дна водоёмов или резервуаров с водой или другими жидкостями. Основным элементом устройства является блок приёма и передачи акустического сигнала 6. Блок приёма и передачи акустического сигнала 6 размещён в корпусе 3 или конструктивно объединён с ним. Блок приёма и передачи акустического сигнала 6 содержит в том числе электроакустический преобразователь, выполненный и размещённый с обеспечением возможности приёма извне и передачи (излучения) акустического сигнала в окружающую среду. Блок приёма и передачи акустического сигнала 6 закреплён в корпусе 3 таким образом, что направление распространения излучаемого акустического сигнала образует острый угол с направлением вектора силы тяжести (более подробно в отношении размещения блока приёма и передачи акустического сигнала 6 написано далее). При сканировании поверхности дна блок приёма и передачи акустического сигнала 6 движется по винтовой линии с постоянной скоростью погружения. Если дно резервуара плоское, то траектория движения области пересечения сканирующего акустического луча и плоскости резервуара будет представлять спираль. Траектория перемещения сканирующего акустического луча и условное изображение поверхности дна представлены на Фиг. 3. Техническим результатом предлагаемого изобретения является снижение энергетических затрат. 2 н. и 4 з.п. ф-лы, 4 ил.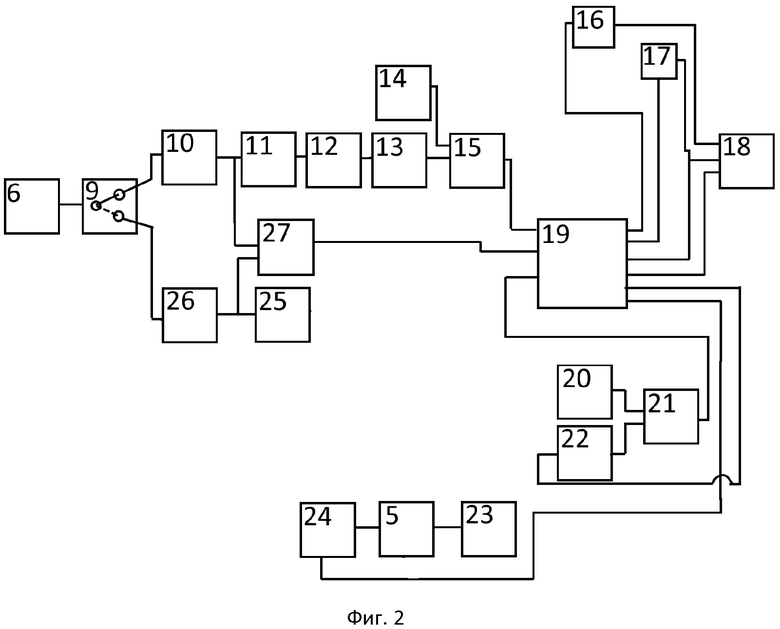
1. Акустический профилограф для получения изображения поверхности дна по первому варианту, содержащий штангу и корпус, причём штанга снабжена ограничителем, расположенным на её конце, корпус снабжён сквозным отверстием, а штанга и сквозное отверстие снабжены резьбами, взаимодействующими друг с другом, кроме того, корпус снабжён блоком приёма и передачи акустического сигнала, блоком питания, блоком регулирования плавучести, выключателем и областью размещения электронных приборов, при этом в области размещения электронных приборов помещены переключатель, блок хранения данных об эхо-сигналах, генератор, блок измерения времени, детектор, интегратор, аналого-цифровой преобразователь, причём генератор соединён с переключателем, который соединён с блоком приёма и передачи акустического сигнала и детектором, притом что генератор и переключатель выполнены с обеспечением формирования импульсно-модулированного сигнала и передачи его на блок приёма и передачи акустического сигнала, а также с обеспечением возможности передачи принятого отражённого сигнала от блока приёма и передачи акустического сигнала в детектор, блок измерения времени выполнен и соединён с обеспечением возможности измерения времени между излучением зондирующего сигнала и приёмом отражённого сигнала, детектор соединён с входом интегратора, выход интегратора соединён с входом аналого-цифрового преобразователя, выход аналого-цифрового преобразователя и выход блока измерения времени соединены с блоком хранения данных об эхо-сигналах.
2. Устройство по п.1, отличающееся тем, что в него дополнительно введены измеритель угла поворота, блок хранения данных об угле поворота, второй блок сравнения, причём выход измерителя угла поворота и выход блока хранения данных об угле поворота соответственно соединены с входами второго блока сравнения, который выполнен с обеспечением возможности сравнения текущего значения от измерителя угла поворота и его предыдущего значения, сохранённого в блоке хранения данных об угле поворота, выход второго блока сравнения соединён с блоком питания, причём блок питания выполнен с обеспечением возможности выключения при получении сигнала, инициированного блоком сравнения при равенстве его входных сигналов.
3. Устройство по п.1, отличающееся тем, что в него дополнительно введён стопор, выполненный с обеспечением возможности удержания корпуса относительно штанги до момента погружения корпуса в жидкость.
4. Акустический профилограф для получения изображения поверхности дна по второму варианту, содержащий штангу и корпус, причём штанга снабжена ограничителем, расположенным на её конце, корпус снабжён сквозным отверстием, а штанга и сквозное отверстие снабжены резьбами, взаимодействующими друг с другом, кроме того, корпус снабжён блоком приёма и передачи акустического сигнала, блоком питания, блоком регулирования плавучести, выключателем и областью размещения электронных приборов, при этом в область размещения электронных приборов помещены переключатель, блок хранения данных об эхо-сигналах, генератор, блок измерения времени, детектор, интегратор, аналого-цифровой преобразователь, причём генератор соединён с переключателем, который соединён с блоком приёма и передачи акустического сигнала и детектором, притом что генератор и переключатель выполнены с обеспечением формирования импульсно-модулированного сигнала и передачи его на блок приёма и передачи акустического сигнала, а также с обеспечением возможности передачи принятого отражённого сигнала от блока приёма и передачи акустического сигнала в детектор, блок измерения времени выполнен и соединён с обеспечением возможности измерения времени между излучением зондирующего сигнала и приёмом отражённого сигнала, детектор соединён с входом интегратора, выход интегратора соединён с входом аналого-цифрового преобразователя, кроме того, введены блок хранения порогового значения и первый блок сравнения, причём аналого-цифровой преобразователь соединён с первым блоком сравнения, блок хранения порогового значения также соединён с первым блоком сравнения, который выполнен с обеспечением возможности передачи сигнала, полученного от аналого-цифрового преобразователя, блоку хранения данных об эхо-сигналах, если сигнал от аналого-цифрового преобразователя больше сигнала от блока хранения порогового значения, и передачи блоку хранения данных об эхо-сигналах сигнала, равного нулю, если сигнал от аналого-цифрового преобразователя меньше сигнала от блока хранения порогового значения.
5. Устройство по п.4, отличающееся тем, что в него дополнительно введены измеритель угла поворота, блок хранения данных об угле поворота, второй блок сравнения, причём выход измерителя угла поворота и выход блока хранения данных об угле поворота соответственно соединены с входами второго блока сравнения, который выполнен с обеспечением возможности сравнения текущего значения от измерителя угла поворота и его предыдущего значения, сохранённого в блоке хранения данных об угле поворота, выход второго блока сравнения соединён с блоком питания, причём блок питания выполнен с обеспечением возможности выключения при получении сигнала, инициированного блоком сравнения при равенстве его входных сигналов.
6. Устройство по п.4, отличающееся тем, что в него дополнительно введён стопор, выполненный с обеспечением возможности удержания корпуса относительно штанги до момента погружения корпуса в жидкость.
| ПАРАМЕТРИЧЕСКИЙ ПРОФИЛОГРАФ | 2013 |
|
RU2541733C1 |
| Скважинный прибор | 1973 |
|
SU533896A1 |
| 0 |
|
SU153907A1 | |
| US 5173882 A1, 22.12.1992 | |||
| US 2006050615 A1, 09.03.2006. | |||

