Изобретение относится к области ультразвукового (УЗ) неразрушающего контроля трубопроводов.
Известен способ УЗ контроля сварных швов, при котором при перемещении вдоль шва транспортной платформы осуществляется излучение в область сварного соединения УЗ сигналов и приём сигналов, отражённых от нарушений сплошности и однородности металла и прошедших через сварной шов. Излучение и приём УЗ сигналов производится четырьмя линейными ЭМА решётками по две с каждой стороны сварного шва. Элементы решёток расположены на поверхности ОК вдоль двух пересекающихся прямых линий. Точка пересечения линий при движении платформы перемещается над осью шва. Каждое положение платформы на поверхности ОК характеризуется расстоянием от начальной точки движения платформы. Для этого используется датчик пути. По этому способу работает комплекс для УЗ контроля изделий, представленный в патенте RU 2515957 C1, 2014 г.
В данном способе используется пространственно-временная обработка реализаций, содержащих эхосигналы, принятые не только элементами той же решётки, которая излучила зондирующие импульсы, но и элементами других решёток. При движении платформы система антенных решёток позволяет реконструировать набор изображений поперечных сечений шва и околошовной зоны, параллельных друг другу, по которым судят о наличии и координатах дефектов в объёме сварного соединения.
Способ рассчитан в основном на контроль локальной зоны изделия - сварного соединения.
Известен способ УЗ контроля трубопровода, согласно которому при перемещении вдоль трубопровода периодически возбуждают УЗ колебания в пределах заданной области его поверхности, связанной с диагностическим устройством, в выбранном интервале времени принимают из этой же области реализации УЗ колебаний от акустических нормальных волн, прошедших по стенкам трубопровода и отраженных от различных нарушений сплошности материала стенок, и с помощью совместной обработки принятых реализаций УЗ колебаний определяют распределение дефектов в стенках трубопровода. Возбуждение и прием УЗ колебаний осуществляют в нескольких точках, соответствующих расположению акустических контактов приемно-излучающих элементов диагностического устройства в указанной области внешней или внутренней поверхностей трубопровода. Возбуждение УЗ колебаний производят касательными к поверхности трубопровода колебательными силами поочередно в каждой точке, а прием колебаний осуществляют одновременно во всех точках в пределах указанной области, причём принимают реализации колебаний ото всех основных типов акустических нормальных волн, распространяющихся по стенкам трубопровода во все стороны от точек возбуждения УЗ колебаний. Из реализаций колебаний, принятых во всех точках поверхности трубопровода при перемещении вдоль него, по предварительно рассчитанным временам задержки для всех типов акустических нормальных волн выбирают эхосигналы от каждой точки поверхности стенок, когерентно суммируют их для каждой точки поверхности отдельно для каждого типа волн, вычисляют амплитуды суммарных сигналов и строят нормированные распределения этих амплитуд в соответствии с координатами точек поверхности стенок трубопровода отдельно для каждого типа акустических волн. Затем составляют одно распределение величины, значения которой равны максимальным значениям амплитуд суммарных сигналов от разных типов акустических волн для совпадающих по координатам точек поверхности стенок трубопровода, и по этому распределению судят о наличии и величине дефектов в стенках трубопровода – RU 2629896 C1, 2017 г.
Известный способ УЗ контроля трубопровода является наиболее усовершенствованным за счёт возможности использования в нём современных преобразователей с сухим точечным контактом. Однако при автоматизированном УЗ контроле стенок трубопроводов наряду с поиском различных дефектов основного металла и сварных швов требуется дополнительно измерять и толщину стенок, т.к. толщина может меняться в некоторых пределах около номинального значения. Кроме того, и само номинальное значение толщины может быть неизвестно. А текущее значение толщины при сканировании трубопровода требуется для правильного отображения координат обнаруживаемых дефектов.
Наиболее близким аналогом изобретения является способ измерения толщины изделия с помощью УЗ импульсов, состоящий в том, что с помощью УЗ преобразователя излучают в материал изделия УЗ импульс, принимают из него эхо-импульсы, многократно отраженные от противоположных поверхностей материала, измеряют время распространения эхо-импульсов от одной поверхности до другой и обратно и вычисляют толщину как произведение половины этого времени на известную скорость распространения УЗ импульсов в материале. В процессе приёма эхо-импульсов измеряют амплитуду помех от собственных затухающих колебаний УЗ преобразователя и средний уровень различных шумов, сопровождающих прием УЗ импульсов из материала. В принятой последовательности импульсов определяют момент времени, когда амплитуда помех от собственных затухающих колебаний УЗ преобразователя становится меньше амплитуды принятых из материала импульсов, и второй момент, когда амплитуда принятых импульсов уменьшится до среднего уровня различных шумов, сопровождающих прием УЗ импульсов из материала. Путём стробирования выделяют из принятой последовательности импульсов ее часть, заключенную между определенными моментами времени, вычисляют нормированную автокорреляционную функцию (АКФ) от стробированной части принятой последовательности импульсов и находят аргумент АКФ, не равный нулю, при котором эта функция достигает максимума. Этот аргумент численно равен времени распространения эхо-импульсов от одной поверхности изделия до другой и обратно. Затем вычисляют искомую толщину изделия как произведение половины этого аргумента на известную скорость распространения ультразвуковых импульсов в материале –
RU 2231753 C1, 2004 г.
Недостатки известного способа состоят в том, что он обеспечивает измерения толщины только с помощью УЗ преобразователя с апертурой в несколько длин УЗ волн и поэтому для его работы нужна контактная жидкость. Сканировать таким преобразователем стенку трубопровода практически невозможно. Кроме того, для этого способа нужно заранее знать значение скорости УЗ волн в материале стенки, т.к. её измерить в каждой зоне расположения преобразователя способ не позволяет.
Техническая задача, решаемая предложенным способом УЗ контроля, заключается в непрерывном при сканировании стенок трубопровода измерении текущей толщины стенки при условии неизвестной скорости УЗ волн в ней, т.е. техническая задача включает в себя ещё и непрерывное измерение текущей скорости УЗ волн в стенке.
Эта задача решена в способе УЗ контроля толщины стенки трубопровода, согласно которому при перемещении вдоль трубопровода диагностического устройства периодически возбуждают импульсы УЗ колебаний касательными к поверхности трубопровода колебательными силами в точках акустических контактов приёмно-излучающих элементов, в выбранном интервале времени принимают из этих же точек реализации УЗ колебаний стенок трубопровода, и с помощью совместной обработки принятых реализаций определяют толщину стенки трубопровода и скорость распространения поперечных УЗ волн в ней. При обработке усредняют реализации, принятые на одинаковых расстояниях (базах) от точек возбуждения колебаний, полученные усреднённые реализации стробируют на определённых интервалах, зависящих от величины базы, на которой были приняты реализации, составляющие каждую усреднённую реализацию. Затем производят преобразование масштаба (шкалы) времени распространения УЗ импульсов от точки возбуждения до донной поверхности стенки и обратно к точке приёма в значения времени пролёта импульсов удвоенного расстояния между поверхностями стенки, суммируют усреднённые реализации в преобразованном масштабе времени, вычисляют АКФ от полученной суммарной реализации и определяют в ней временной интервал между главным максимумом и наибольшим из побочных максимумов. И, наконец, вычисляют толщину путём умножения половины этого интервала на скорость поперечных волн в стенке трубопровода, а скорость определяют путём деления разности величин двух баз на разность времён распространения импульсов поперечных волн по этим базам.
Отдельные операции способа и их особенности состоят в следующем:
― возбуждают импульсы ультразвуковых колебаний и принимают реализации ультразвуковых колебаний с помощью антенных решёток, состоящих из элементов с сухим точечным контактом с одинаково ориентированными векторами колебательных смещений;
― усредняют реализации, принятые на одинаковых расстояниях (базах) от точек возбуждения колебаний путём суммирования мгновенных значений сигналов в одинаковые моменты времени и деления каждой суммы на количество слагаемых;
― момент времени начала интервала стробирования каждой суммарной реализации выбирают равным сумме времени распространения поперечных волн вдоль соответствующей базы и длительности зондирующего импульса, а длительность интервала стробирования выбирают в пределах от 4 до 5 интервалов времени пролёта ультразвуковых импульсов удвоенного расстояния между поверхностями стенки для максимально возможной толщины стенки трубопровода при средней скорости поперечных волн в ней;
― преобразование масштабов времени производят по формуле:
 (1)
(1)
Где td - время пролёта ультразвуковых импульсов удвоенного расстояния между поверхностями стенки;
t – время распространения ультразвуковых импульсов от точки возбуждения до донной поверхности стенки и обратно к точке приёма;
B – база между точками возбуждения и приёма ультразвуковых колебаний;
c – скорость поперечных волн в стенке трубопровода.
Физический смысл способа состоит в том, что в стенках трубопровода поочерёдно в нескольких точках с известными координатами на поверхности трубы возбуждают УЗ колебания поперечных УЗ волн с горизонтальной поляризацией (SH волн). Эти точки представляют собой упорядоченную группу. Взаимное расположение точек в группе не меняется при перемещении всей группы вдоль трубопровода. SH волны обладают такими особенностями, что их распространение в стенках трубопровода возможно на большие расстояния (десятки метров) без значительного затухания, и их скорость распространения не зависит от направления вдоль или по толщине стенок при условии изотропии материала стенок или если анизотропией материала можно пренебречь, что обычно бывает при практическом контроле.
Принятые из стенок трубопровода реализации УЗ колебаний запоминаются в памяти диагностического устройства. Во всём массиве реализаций есть такие, которые приняты в точках, расположенных на одинаковых расстояниях (базах) от точек возбуждения в трубопроводе зондирующих импульсов SH волн. Такие реализации содержат эхоимпульсы от донной поверхности трубопровода в одни и те же моменты времени, т.е. эти реализации хорошо коррелированны между собой. Поэтому их усредняют, что даёт значительное увеличение отношения сигнал/шум.
Стробирование усреднённых реализаций позволяет исключить из дальнейшей обработки помеху от прямого прохождения к точке приёма зондирующего импульса по стенке трубы и прочих помех, возникающих в стенке от нерабочих типов волн и многократных прохождений зондирующих импульсов вокруг трубы в интервале времени, когда уровень полезных эхоимпульсов сравним и ниже этих помех.
Преобразование масштабов (шкал) времени необходимо для того, чтобы нелинейную зависимость времени прихода полезных эхоимпульсов от их номеров, т.е. первого, второго и т.д. отражения зондирующего импульса от донной поверхности, привести к линейной и однозначной связи номера отражения (номера полезного эхоимпульса) с временем его положения на временной оси, т.е. с временем пролёта расстояния, которое мог бы пройти УЗ сигнал по нормали к поверхностям стенки при соответствующем количестве отражений от донной поверхности. Это преобразование обеспечивает совмещение во времени всех полезных эхоимпульсов с одинаковыми номерами, независимо от величин баз, при которых были приняты реализации, содержащие эти сигналы.
После преобразования все реализации можно сложить (или усреднить), что ещё больше повышает отношение сигнал/шум в результирующей суммарной реализации.
Для измерения интервала времени пролёта сигнала от внешней поверхности стенки к донной и обратно вычисляют АКФ от полученной суммарной реализации и определяют в ней временной интервал между главным максимумом и наибольшим из побочных максимумов.
Толщину вычисляют, используя половину найденного интервала времени и предварительно вычисленную скорость SH волн по разности известных значений баз возбуждения – приёма УЗ колебаний в трубопроводе и соответствующей разности времён прихода сигналов, прошедших вдоль стенки трубы по этим базам.
Ход процесса выполнения предложенного способа иллюстрируется следующими фигурами:
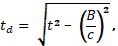
― фиг. 1 - две осциллограммы усреднённых реализаций для двух разных баз после операции стробирования. Сплошной линией представлена реализация, полученная на базе, приблизительно равной толщине стенки трубы. Штрих-пунктирная линия иллюстрирует реализацию, полученную на втрое большей базе;
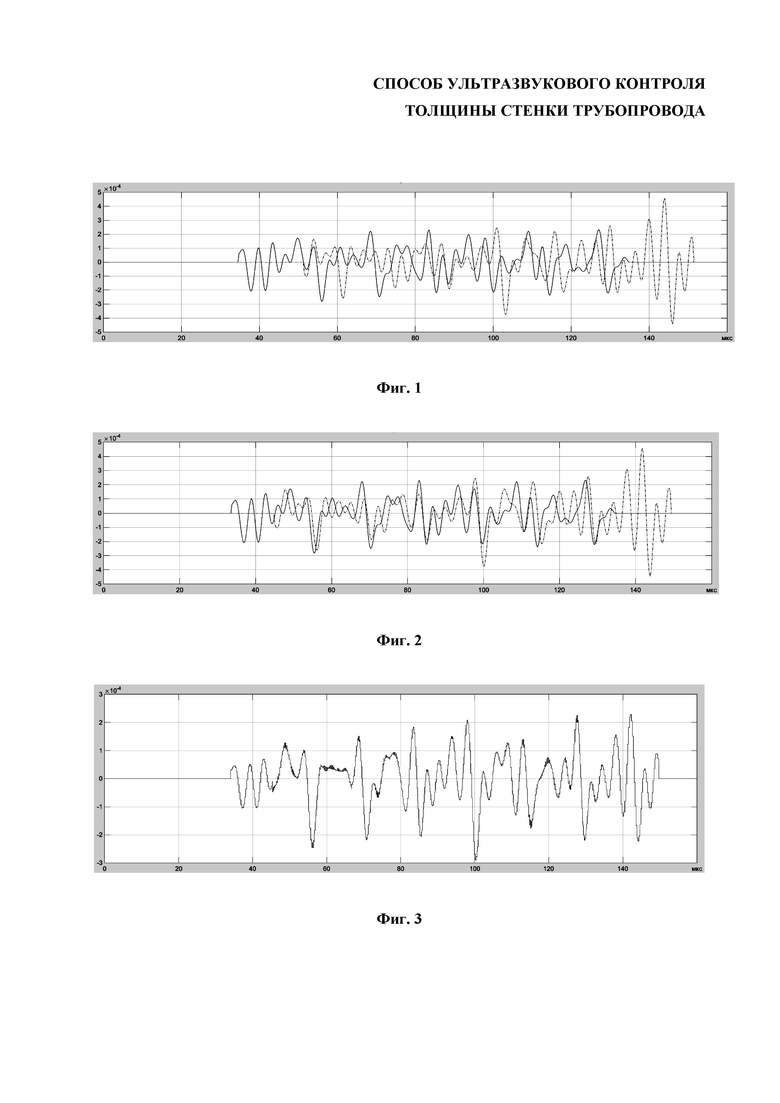
― фиг. 2 - те же реализации, но после преобразования их временных шкал к шкале времени, пропорциональной толщине стенки трубы;
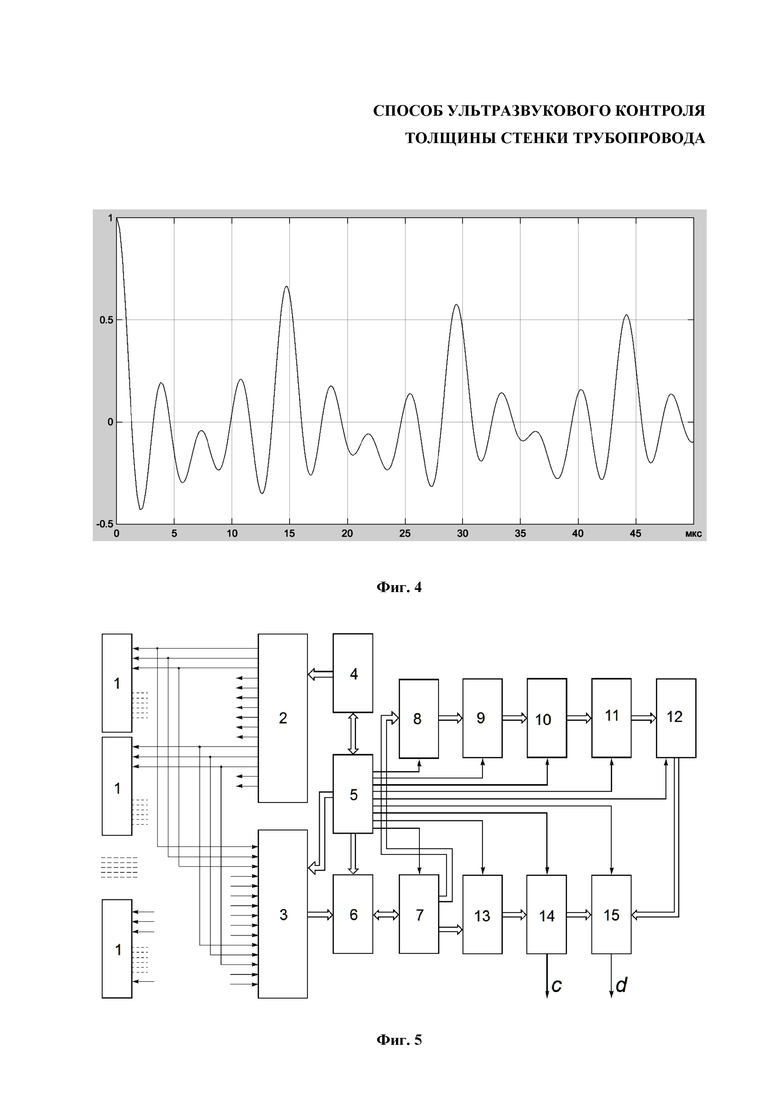
― фиг. 3 - сумма реализаций после временного преобразования;
― фиг. 4 - автокорреляционная функция суммарной реализации, представленной на фиг. 3. АКФ приведена только для положительных значений её аргумента вследствие её чётности (симметрии);
― фиг. 5 - одна из возможных структурных схем практической реализации предложенного способа.
Все операции обработки принятых реализаций УЗ колебаний можно выполнить во встраиваемом в аппаратуру микропроцессоре или в процессоре компьютера по специально разработанной программе. Микропроцессор или компьютер могут также управлять и всем процессом сбора и обработки УЗ данных, т.е. управлять работой всей аппаратуры. Можно также часть аппаратуры, выполняющую обработку реализаций, построить на программируемых логических матрицах – программируемых логических интегральных схемах (ПЛИС). В настоящее время такую обработку можно выполнить даже на одной ПЛИС, например, на AT94S10AL производства компании Microchip Technology Inc.
На фиг. 5 изображена структурная схема аппаратуры, построенная с использованием ПЛИС.
Аппаратура содержит антенные решётки 1 (в частном случае - одну решётку) для возбуждения и приёма ультразвуковых колебаний в стенках трубопровода, многоканальный генератор 2 импульсов возбуждения элементов антенных решёток, каждый выход которого непосредственно соединён с каждым соответствующим элементом антенных решёток 1 и с соответствующим входом многоканального приёмного тракта 3. Многоканальный генератор 2 импульсов возбуждения состоит из дешифратора адресного кода данных от синхронизатора 4 и подключённых к выходам дешифратора одноканальных генераторов. Каждый канал многоканального приёмного тракта 3 состоит из последовательно соединённых ограничителя, усилителя и аналого-цифрового преобразователя.
Синхронизатор 4 подключён выходом к многоканальному генератору 2 импульсов возбуждения через шину передачи данных, а его вход связан через шину обмена данными с блоком 5 управления. Блок 5 управления и управляющие входы многоканального приёмного тракта 3 и блока 6 памяти связаны через шины передачи данных. Информационный вход блока 6 памяти подключён к выходу многоканального приёмного тракта 3 через шину передачи данных.
Блок 6 памяти через шину обмена данных подключён к сумматору 7. Сумматор 7 имеет два выхода, которые через шины передачи данных подключены к двум параллельным трактам цифровой обработки.
Первый тракт состоит из последовательно соединённых шинами передачи данных блока 8 стробирования, блока 9 преобразования шкал времени, сумматора 10, блока 11 вычисления АКФ и блока 12 определения временного интервала толщины.
Второй тракт состоит из последовательно соединённых шиной передачи данных блока 13 определения разности временных интервалов и блока 14 вычисления скорости.
Информационные выходы блока 14 вычисления скорости и блока 12 определения временного интервала толщины через шины передачи данных подключены ко входам умножителя 15, выход которого является выходом значения измеренной толщины. Выход блока 14 вычисления скорости – это выход значения измеренной скорости.
Входы управления блоков 7, 8, 9, 10, 11, 12, 13, 14 и 15 подключены к соответствующим управляющим выходам блока 5 управления.
Работа блок-схемы по фиг. 5 осуществляется следующим образом.
По сигналу от блока 5 управления синхронизатор 4 генерирует числовой код для включения первого канала генератора 2 импульсов возбуждения, который генерирует импульс возбуждения на первом элементе первой антенной решётки 1. Первый элемент этой решётки возбуждает в стенке трубопровода УЗ колебания. От точки акустического контакта этого элемента распространяются SH волны.
Одновременно с посылкой зондирующего импульса начинается приём УЗ колебаний всеми каналами приёмного тракта 3. Принятые каждым элементом антенных решёток 1 УЗ колебания SH волн преобразуются в электрические сигналы, которые усиливаются в каждом канале приёмного тракта 3, подвергаются преобразованию в цифровую форму и запоминаются в блоке 6 памяти. Приём УЗ колебаний производится в интервале времени, в течение которого осуществляется приём эхосигналов от отражателей на разных дальностях, вплоть до наиболее удалённых от антенных решёток, т.к. диагностическое устройство используется не только для измерения толщины и скорости УЗ волн. Полезная информация (донные эхосигналы) для измерения толщины и скорости содержится только в начальном, относительно небольшом интервале времени.
Далее этот процесс повторяется до окончания интервала приёма УЗ колебаний от зондирующего импульса последнего элемента антенных решёток 1. Затем зондирование начинается снова с первого элемента решёток 1 и т.д. непрерывно при движении диагностического устройства по трубопроводу.
Одновременно с процессом зондирования и приёма УЗ колебаний происходит обработка принятых реализаций. Используется алгоритм, изложенный выше. По командам блока 5 управления из блока 6 памяти выбираются реализации УЗ колебаний, полученные при одинаковых базах между элементами всех антенных решёток 1. В сумматоре 7 производится их усреднение, и усреднённые реализации поступают на входы блока 8 стробирования и блока 13 определения разности временных интервалов.
В блоке 8 стробирования происходит выделение информационной части каждой усреднённой реализации, т.е. вырезка колебаний из неё на интервале времени, зависящем от величины базы для данной усреднённой реализации. Это выполняется по сигналам блока 5 управления. На фиг. 1 показаны для примера две осциллограммы усреднённых реализаций для двух разных баз после операции стробирования.
В блоке 9 преобразования шкал времени производится нелинейное преобразование времени по формуле (1) путём создания таблиц соответствия моментов времени td моментам времени t и переноса мгновенных значений реализаций на входе блока 9 преобразования шкал времени на его выход при новых значениях моментов времени. В результате на выходе блока 9 преобразования шкал времени формируются преобразованные реализации, пример которых приведён на фиг. 2.
Реализации в преобразованном масштабе времени суммируются в сумматоре 10 и их сумма поступает на вход блока 11 вычисления АКФ. Пример суммы преобразованных реализаций приведён на фиг. 3.
АКФ, вычисленная от поданной на вход блока 11 суммарной реализации, подаётся на вход блока 12 определения временного интервала толщины. АКФ от суммы реализаций, показанных на фиг. 3, изображена на фиг. 4.
В блоке 12 определения временного интервала толщины происходит поиск аргумента АКФ (временного сдвига входной суммарной реализации относительно своей копии), при котором эта функция достигает максимума, исключая её главный максимум при равенстве аргумента нулю. Значение найденного аргумента (на фиг. 4 он приблизительно равен 14,8 мкс) численно равно измеряемому временному интервалу tи, по которому вычисляется толщина d стенки трубопровода.
По усреднённым реализациям для двух разных баз, поступившим на вход блока 13 с выхода сумматора 7, производится определение разности временных интервалов между моментами возбуждения излучающих элементов антенных решёток и моментами прихода на приёмные элементы передних фронтов зондирующих импульсов, прошедших по стенке трубопровода по соответствующим базам. Эта разность временных интервалов, т.е. интервал времени между моментами передних фронтов импульсов, подаётся на блок 14 вычисления скорости.
В блоке 14 происходит вычисление скорости SH волн по формуле:
 (2)
(2)
где ΔВ – разность величин баз;
Δt – разность временных интервалов, определённая в блоке 13.
Полученное значение скорости поступает на выход блока 14 вычисления скорости и на первый вход умножителя 15. На другой вход умножителя 15 поступает значение измеренного интервала времени tи. В умножителе 15 вычисляется измеренное значение толщины по формуле:
 (3)
(3)
Измеренное значение толщины появляется на выходе умножителя 15. Оно вместе с измеренным значением скорости с используется в процессе функционирования диагностического устройства.
С помощью предлагаемого способа УЗ контроля при сканировании диагностическим устройством стенок трубопровода возможно производить измерение текущей толщины стенки для правильного отображения координат обнаруживаемых дефектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ультразвуковой дефектоскопии трубопровода | 2024 |
|
RU2834582C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ИЗДЕЛИЯ | 2009 |
|
RU2442106C2 |
| Способ определения акустической плотности | 2017 |
|
RU2657314C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ИЗДЕЛИЯ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ ИМПУЛЬСОВ | 2003 |
|
RU2231753C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| Способ обнаружения шумящих объектов в мелком море в инфразвуковом диапазоне частот | 2022 |
|
RU2794716C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ОТРАЖЕНИЯ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2697428C1 |
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЁТКА | 2016 |
|
RU2629894C1 |
| Толщиномер | 2022 |
|
RU2784645C1 |
| Способ и устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах | 2019 |
|
RU2705943C1 |
Использование: для ультразвукового контроля толщины стенки трубопровода. Сущность изобретения заключается в том, что при перемещении вдоль трубопровода диагностического устройства периодически возбуждают импульсы УЗ-колебаний касательными к поверхности трубопровода колебательными силами в точках акустических контактов приёмно-излучающих элементов, в выбранном интервале времени принимают из этих же точек реализации УЗ-колебаний стенок трубопровода и с помощью совместной обработки принятых реализаций определяют толщину стенки трубопровода и скорость распространения поперечных УЗ-волн в ней. При обработке усредняют реализации, принятые на одинаковых расстояниях (базах) от точек возбуждения колебаний, полученные усреднённые реализации стробируют на определённых интервалах, зависящих от величины базы, на которой были приняты реализации, составляющие каждую усреднённую реализацию. Затем производят преобразование масштаба (шкалы) времени распространения УЗ-импульсов от точки возбуждения до донной поверхности стенки и обратно к точке приёма в значения времени пролёта импульсов удвоенного расстояния между поверхностями стенки, суммируют усреднённые реализации в преобразованном масштабе времени, вычисляют автокорреляционную функцию от полученной суммарной реализации и определяют в ней временной интервал между главным максимумом и наибольшим из побочных максимумов. И, наконец, вычисляют толщину путём умножения половины этого интервала на скорость поперечных волн в стенке трубопровода, а скорость определяют путём деления разности величин двух баз на разность времён распространения импульсов поперечных волн по этим базам. Технический результат: обеспечение возможности непрерывного измерения текущей толщины стенки трубопровода при ее сканировании, а также обеспечение возможности непрерывного измерения текущей скорости ультразвуковых волн в стенке трубопровода. 4 з.п. ф-лы, 5 ил.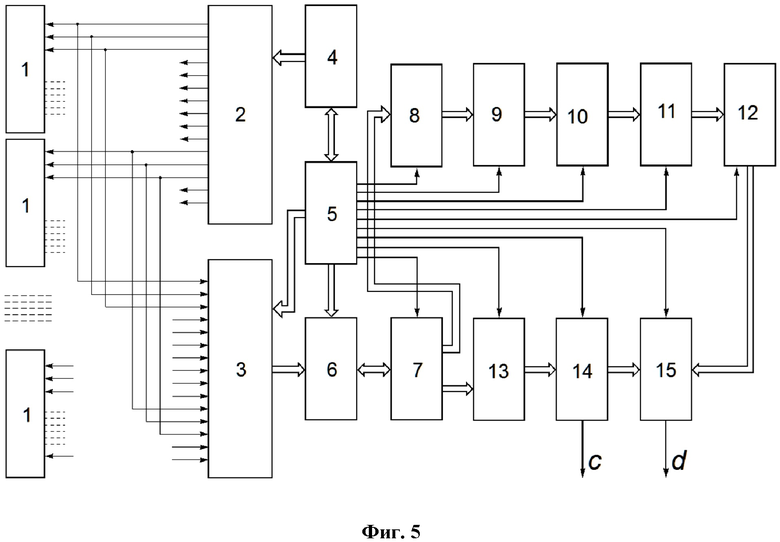
1. Способ ультразвукового контроля толщины стенки трубопровода, согласно которому при перемещении вдоль трубопровода диагностического устройства периодически возбуждают импульсы ультразвуковых колебаний касательными к поверхности трубопровода колебательными силами в точках акустических контактов приёмно-излучающих элементов, в выбранном интервале времени принимают из этих же точек реализации ультразвуковых колебаний стенок трубопровода и с помощью совместной обработки принятых реализаций определяют толщину стенки трубопровода и скорость распространения поперечных ультразвуковых волн в ней, отличающийся тем, что усредняют реализации, принятые на одинаковых расстояниях (базах) от точек возбуждения колебаний, полученные усреднённые реализации стробируют на определённых интервалах, зависящих от величины базы, на которой были приняты реализации, составляющие каждую усреднённую реализацию, а также зависящих от времени распространения ультразвуковых импульсов от точки возбуждения до донной поверхности стенки и обратно к точке приёма, производят преобразование масштабов времени - времени распространения ультразвуковых импульсов от точки возбуждения до донной поверхности стенки и обратно к точке приёма - в значения времени пролёта ультразвуковых импульсов удвоенного расстояния между поверхностями стенки, суммируют усреднённые реализации в преобразованном масштабе времени, вычисляют автокорреляционную функцию от полученной суммарной реализации, определяют в ней временной интервал между главным максимумом и наибольшим из побочных максимумов и определяют толщину стенки путём умножения половины этого интервала на скорость распространения поперечных ультразвуковых волн в стенке трубопровода, а скорость распространения поперечных ультразвуковых волн определяют путём деления разности величин двух баз на разность времён распространения импульсов поперечных волн по этим базам.
2. Способ по п. 1, отличающийся тем, что возбуждают импульсы ультразвуковых колебаний и принимают реализации ультразвуковых колебаний с помощью антенных решёток, состоящих из элементов с сухим точечным контактом с одинаково ориентированными векторами колебательных смещений.
3. Способ по п. 1, отличающийся тем, что усредняют реализации, принятые на одинаковых расстояниях (базах) от точек возбуждения колебаний путём суммирования мгновенных значений сигнала в одинаковые моменты времени и деления каждой суммы на количество слагаемых.
4. Способ по п. 1, отличающийся тем, что момент времени начала интервала стробирования каждой суммарной реализации выбирают равным сумме времени распространения поперечных волн вдоль соответствующей базы и длительности зондирующего импульса, а длительность интервала стробирования выбирают в пределах от четырёх до пяти интервалов времени пролёта ультразвуковых импульсов удвоенного расстояния между поверхностями стенки для максимально возможной толщины стенки трубопровода при средней скорости поперечных волн в ней.
5. Способ по п. 1, отличающийся тем, что преобразование масштабов времени производят по формуле
где td - время пролёта ультразвуковых импульсов удвоенного расстояния между поверхностями стенки;
t – время распространения ультразвуковых импульсов от точки возбуждения до донной поверхности стенки и обратно к точке приёма;
B – база между точками возбуждения и приёма ультразвуковых колебаний;
c – скорость поперечных волн в стенке трубопровода.
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ИЗДЕЛИЯ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ ИМПУЛЬСОВ | 2003 |
|
RU2231753C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| Цветовой пирометр | 1960 |
|
SU136576A1 |
| EP 0775910 A1, 28.05.1997 | |||
| JP 2000146921 A, 26.05.2000. | |||

