Область техники
Изобретение относится к устройствам ультразвуковой визуализации (УЗВ) объектов, расположенных в жидких средах, в том числе и высокотемпературных типа расплавленных металлов.
Уровень техники
Большинство известных ультразвуковых (УЗ) технологий визуализации объектов, расположенных в жидких средах, основаны на использовании способа пьезоэлектрического преобразования акустических сигналов в электрические. Такие преобразователи получили название «гидрофоны» или «пьезодатчики», которые могут быть выполнены в виде сканирующих одиночных датчиков, либо матричных датчиков (линейных или двумерных), которые помещаются в жидкую среду, либо контактируют с ней. Практическая реализация таких устройств, предназначенных для получения УЗ изображений объектов, расположенных в высокотемпературных жидкостях и расплавленных металлах, сопряжена с необходимостью решения следующих технологических проблем.
Для получения УЗ изображений с высоким разрешением необходимо использовать высокие частоты ультразвука, обычно в диапазоне от 2 до 5 МГц. Если принять скорость распространения УЗ в жидкостях (в среднем) 1500 м/с, то соответствующие длины волн получаются равными λ = (0,75 – 0,3) мм, а для получения достаточно большого сектора обзора (порядка 100 градусов) размеры датчиков должны быть не более половины длины волны, (0,37 – 0,15) мм или равными длине волны при секторе обзора порядка 45 градусов. Такие малые размеры пьезодатчиков, (особенно собранных в матрицы) приводят к необходимости использования прецизионной лазерной сварки для обеспечения электрического контакта датчика с проводниками, в процессе которой часто нарушается структура пьезоматериала.
Хотя высокотемпературная пьезокерамика и существует, её чувствительность на порядок и более меньше, чем у пьезокерамики, работающей при обычных температурах, в связи, с чем ухудшается контраст УЗ изображений и их разрешающая способность, возрастает влияние перекрёстных помех (влияние пьезоэлементов друг на друга). Все эти факторы приводят к невысокому качеству изображений.
Размещение пьезоэлементов в среде с высокой температурой с учётом их низкой чувствительности требует использования дополнительных электронных устройств, которые в свою очередь, требуют принудительного охлаждения. Это приводит к сложным и дорогим техническим решениям.
Наиболее близким техническим решением (прототип) является устройство ультразвуковой визуализации объектов в жидких средах (изобретение RU 2650348, дата публикации 11.04.2018). Устройство содержит установленные в герметичном корпусе лазер, систему линз и зеркал, приёмную матрицу и диск с отверстиями, в которых расположены волноводы, а также расположенные за пределами корпуса генератор, излучатель, блок обработки, дисплей. Корпус с внутренними элементами и излучатель размещают в исследуемой среде (обычно агрессивной), при помощи излучателя генерируют акустическое излучение, которое при достижении границы раздела сред (обычно поверхность какого-либо объекта) отражается и воздействует на волноводы. Торцы волноводов и одна из линз образуют оптический интерферомерт Фабри-Перо, с помощью которого и остальных линз и зеркал, а также приёмной матрицы, получают электрический сигнал, содержащий в себе информацию об продольных смещениях торцов волноводов. После обработки сигнала в блоке обработки на дисплее формируют изображение объекта, расположенного в исследуемой среде.
Недостатком известного технического решения является сложность устройства, обусловленная небольшой длиной волноводов и необходимостью размещения в среде помимо волноводов системы линз и зеркал, лазера и излучателя. Размещение в среде линз, зеркал и лазера требует наличия герметичного корпуса. Кроме того, все элементы, контактирующие со средой должны быть выполненными стойкими к воздействию исследуемой среды, что дополнительно усложняет как элементы по отдельности, так и устройство в целом. Дополнительно использование волноводов небольшой длины приводит к невысокому качеству получаемого изображения, что связано с влиянием изгибных мод в волноводах. Это объясняется тем, что при небольшой длине волноводов изгибные моды, имеющие скорость распространения меньшую, чем у продольных мод, достигают выходных торцов волноводов незначительно позже продольных мод, влияние которых наиболее предпочтительно использовать для получения изображения.
Техническим результатом предлагаемого изобретения является упрощение конструкции.
Указанный технический результат достигается за счёт того, что в способе ультразвуковой визуализации объектов в жидких средах, включающем излучение акустического сигнала в жидкую среду, размещение входных торцов акустических волноводов в зоне распространения отражённого акустического сигнала, передачу акустического сигнала посредством соответствующих акустических волноводов, длина которых выбрана обеспечивающей временное разделение сигналов различных мод этих акустических волноводов на соответствующих их выходных торцах, измерение смещений указанных выходных торцов, вычисление пространственно-временного распределения сигнала, соответствующего изображению объекта, при этом вычисление пространственно-временного распределения сигнала, соответствующего изображению объекта, осуществляется последовательным выполнением операций: получения комплексного частотного спектра в заданном временном окне для каждого сигнала с соответствующего выходного торца соответствующего акустического волновода путём дискретного преобразования Фурье, полосовой фильтрации сигналов с частотной характеристикой, определяемой параметрами излучающей и регистрирующей систем, численного обращения волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента, численного обратного распространения каждой спектральной линии от соответствующего выходного торца соответствующего акустического волновода к соответствующему входному торцу этого акустического волновода путём фазового сдвига, определяемого дисперсионной характеристикой используемых соответствующих акустических волноводов и их длиной, расчёта углового спектра поля на плоскости, образованной соответствующими входными торцами акустических волноводов, для каждой спектральной линии с использованием двумерного пространственного преобразования Фурье, численного обратного восстановления поля в жидкости в пространственном окне наблюдения перед соответствующими входными торцами акустических волноводов для каждой спектральной линии путём свёртки с функцией Грина, осуществления обратного двумерного преобразования Фурье в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения, осуществления обратного двумерного преобразования Фурье в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах, построения изображения объекта по результатам предыдущей операции; а в устройстве ультразвуковой визуализации объектов в высокотемпературных жидких средах для реализации способа ультразвуковой визуализации объектов в жидких средах содержится первый акустический волновод с первых входным торцом и первым выходным торцом, устройство определения смещений, блок обработки, синхрогенератор, переключатель, генератор, излучатель, блок отображения, волноводную матрицу содержащую матричный держатель и вторые акустические волноводы, каждый из которых снабжён вторым входным торцом и вторым выходным торцом и закреплён в матричном держателе, причём излучатель присоединён к первому входному торцу первого акустического волновода, устройство определения смещений размещено с обеспечением возможности определения величин смещения вторых выходных торцов вторых акустических волноводов, а синхрогенератор электрически соединён с входом переключателя, один из выходов переключателя электрически соединён с генератором, а другой выход переключателя соединён с блоком обработки, выход генератора электрически соединён с излучателем, выход устройства определения смещений электрически соединён со входом блока обработки, а выход блока обработки электрически соединён с блоком отображения, при этом блок обработки выполнен с обеспечением возможности последовательного выполнения операций: вычисления комплексного частотного спектра в заданном временном окне для каждого сигнала со второго выходного торца второго акустического волновода путём дискретного преобразования Фурье, полосовой фильтрации вычисленных сигналов, численного обращения волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента, численного обратного распространения каждой спектральной линии от соответствующего выходного торца соответствующего акустического волновода к соответствующему входному торцу этого акустического волновода путём фазового сдвига, определяемого дисперсионной характеристикой используемых соответствующих акустических волноводов и их длиной, расчёта углового спектра поля на плоскости, образованной соответствующими входными торцами акустических волноводов, для каждой спектральной линии с использованием двумерного пространственного преобразования Фурье, численного обратного восстановления поля в жидкости в пространственном окне наблюдения перед соответствующими входными торцами акустических волноводов для каждой спектральной линии путём свёртки с функцией Грина, осуществления обратного двумерного преобразования Фурье в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения, осуществления обратного двумерного преобразования Фурье в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах, в одном частном случае матричный держатель выполнен в виде трубы, вторые акустические волноводы расположены внутри трубы, которая заполнена воздухом, в другом частном случае первый акустический волновод расположен в трубе.
Краткое описание чертежей
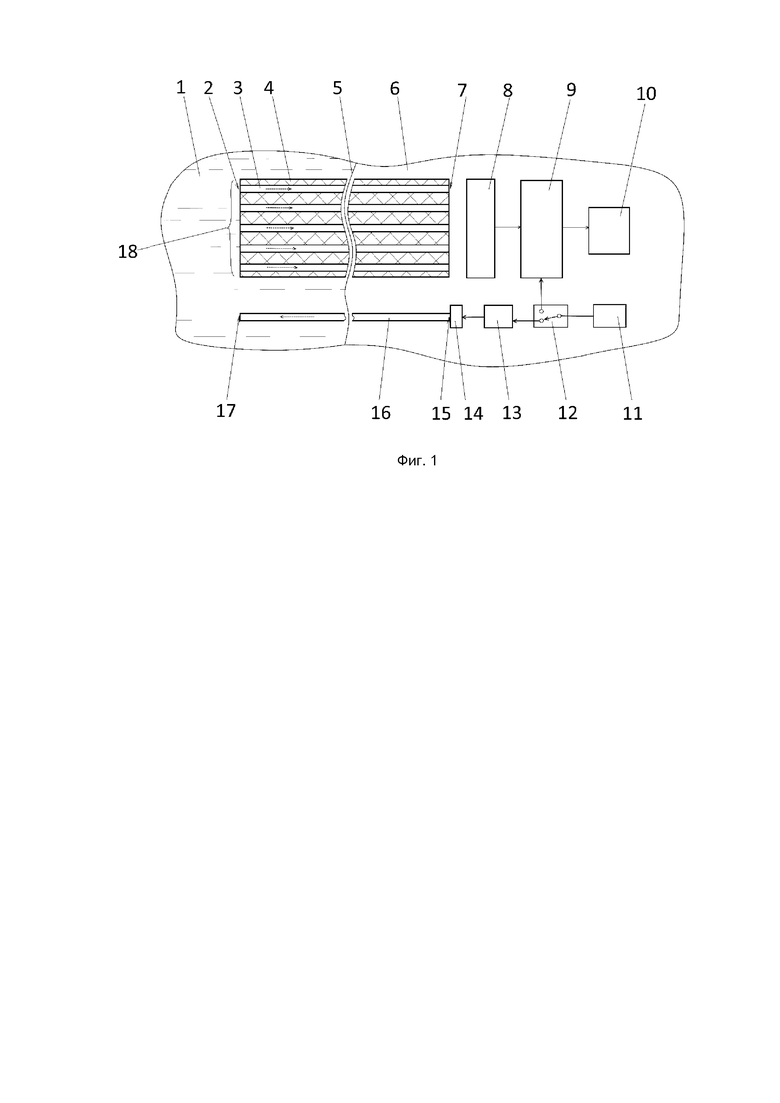
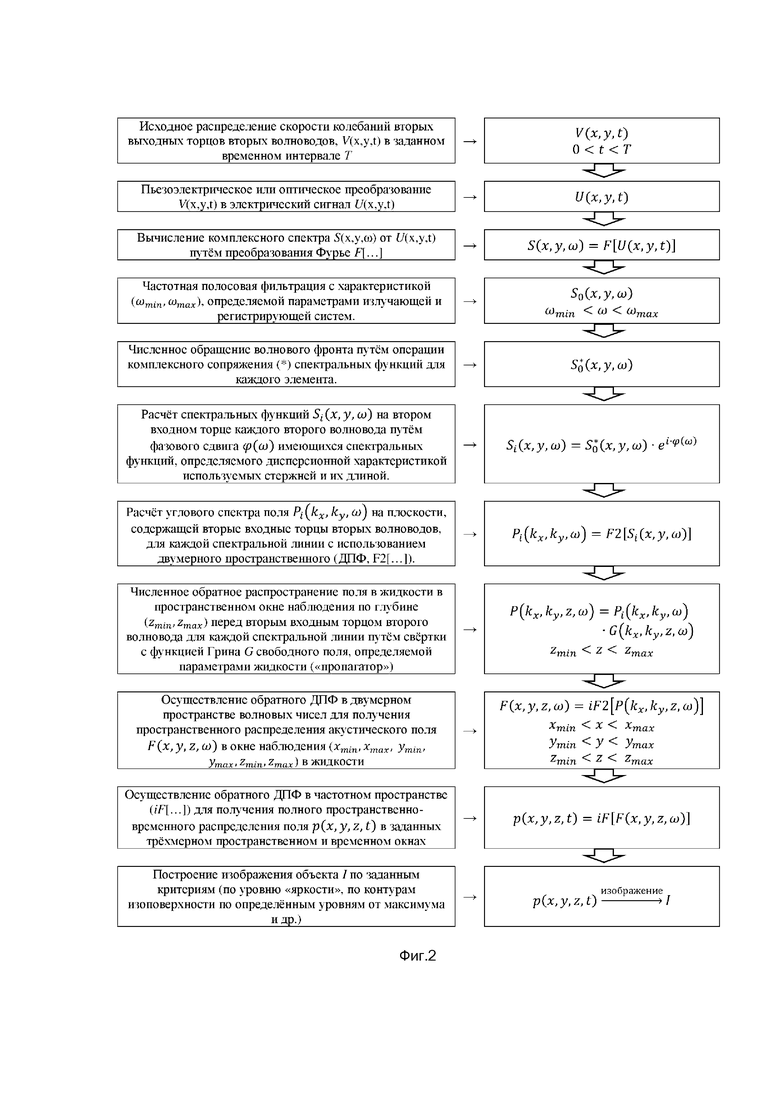
Изобретение поясняется чертежами (фиг.1-2), где на фиг.1 показана схема устройства, на фиг.2 показана блок-схема с последовательностью математических операций при обработке.
Раскрытие изобретения
На чертеже обозначены: агрессивная среда 1, второй входной торец 2, второй акустический волновод 3, матричный держатель 4, граница раздела сред 5, неагрессивная среда 6, второй выходной торец 7, устройство определения смещений 8, блок обработки 9, блок отображения 10, синхрогенератор 11, переключатель 12, генератор 13, излучатель 14, первый входной торец 15, первый акустический волновод 16, первый выходной торец 17, волноводная матрица 18.
Основными элементами устройства являются излучающая система и регистрирующая система. В состав излучающей системы входит первый акустический волновод 16 с излучателем 14 и генератором 13. В состав регистрирующей системы входит волноводная матрица 18, состоящая из вторых акустических волноводов 3 и матричного держателя 4, устройство определения смещений 8, блок обработки 9 и блок отображения 10.
Первый акустический волновод 16 представляет собой стержневой элемент, круглого сечения. Размеры сечения определяют по используемой частоте акустического излучения, а длина первого акустического волновода 16 подобрана так, чтобы один из торцов первого акустического волновода 16 был расположен в агрессивной среде 1, а другой торец расположен за пределами агрессивной среды 1, т.е. в неагрессивной среде 6. Торец первого акустического волновода 16, расположенный в неагрессивной среде 6 и через который волны проникают в первый акустический волновод 16, далее по тексту именуется первым входным торцом 15. Торец первого акустического волновода 16, расположенный в агрессивной среде 1 и через который волны после прохождения по первому акустическому волноводу 16 выходят в агрессивную среду 1, далее по тексту именуется первым выходным торцом 17. Первый акустический волновод 16 используют для облучения заданного пространства среды, в которой могут располагаться объекты, изображения которых необходимо получить. Первый акустический волновод 16 может быть выполнен прямолинейным или изогнутым вдоль своей длины. Причём радиус изгиба не должен превышать менее 10-15 длин волн используемой частоты. Первый акустический волновод 16 выполняют из металлов, металлических сплавов, кварца или других материалов с малым акустическим поглощением, причём используемые материалы должны быть стойкими к воздействию агрессивной среды 1. На первом входном торце 15 установлен излучатель 14.
Излучатель 14 представляет собой устройство, обеспечивающее возбуждение звуковых волн, т.е. генерацию акустического излучения посредством преобразования получаемого электрического сигнала в акустический сигнал. В качестве излучателя 14 может быть использован любой акустический излучатель, например, пьезоэлектрический излучатель. Излучатель 14 установлен таким образом, чтобы звуковые волны могли воздействовать на первый входной торец 15 и затем распространяться по первому акустическому волноводу 16 (обычно излучатель присоединён к первому входному торцу 15).
Волноводная матрица 18 представляет собой несколько параллельных (или попарно равноудалённых друг от друга) вторых акустических волноводов 3, расположенных в матричном держателе 4 в определённом порядке на расстоянии друг от друга. Количество вторых акустических волноводов 3 в волноводной матрице 18 определяется необходимым разрешением получаемого изображения.
Каждый второй акустический волновод 3 выполнен аналогично первому акустическому волноводу 16 и представляет собой стержневой элемент, круглого сечения. Размеры сечения определяются используемой частотой акустического излучения, а длина подобрана так, чтобы один из торцов каждого второго акустического волновода 3 был расположен в агрессивной среде 1, а другой торец - расположен за пределами агрессивной среды 1, т.е. в неагрессивной среде 6. Торец второго акустического волновода 3, расположенный в неагрессивной среде 6 и через который волны после прохождения по второму акустическому волноводу 3 покидают его, далее по тексту именуется вторым выходным торцом 7. Торец второго акустического волновода 3, расположенный в агрессивной среде 1 и через который волны проникают во второй акустический волновод 3, далее по тексту именуется вторым входным торцом 2. Второй акустический волновод 3 может быть выполнен прямолинейным или плавно изогнутым вдоль своей длины. При этом минимальный радиус кривизны в месте изгиба должен составлять не менее 10 длин волн центральной частоты в агрессивной среде 1. Второй акустический волновод 3 выполняют из металлов, металлических сплавов, кварца или других материалов с малым акустическим поглощением, причём используемые материалы должны быть стойкими к воздействию агрессивной среды 1.
Матричный держатель 4 представляет собой средство, обеспечивающее определённое взаимное расположение вторых акустических волноводов 3, т.е. их удержание в определённом положении (согласно значению 2 в Толковом словаре Ефремовой держатель - приспособление для удерживания чего-либо, https://dic.academic.ru/dic.nsf/efremova/157720/Держатель, дата обращения 11.05.2018). Матричный держатель 4 может быть выполнен в виде застывшего вокруг размещённых в определённом порядке вторых акустических волноводов 3 материала (например, компаунд или другие), в виде монолитной детали требуемой формы с выполненными в ней отверстиями, в которых впоследствии размещают вторые акустические волноводы 3, или в виде двух или более дисков с отверстиями (аналогично трубным решёткам в кожухотрубчатых теплообменниках), в отверстиях закреплены вторые акустические волноводы 3, причём один из дисков расположен вблизи вторых входных торцов 2, другой – вблизи вторых выходных торцов 7, между двумя указанными могут быть расположены дополнительные диски с отверстиями. В частном случае матричный держатель 4 может быть выполнен в виде трубы (жёсткой стальной), внутри которой расположены вторые акустические волноводы 3, а пространство между ними заполнено воздухом. Конструкция матричного держателя 4 в виде трубы необходима при использовании вторых акустических волноводов 3 большой длины, например, не менее пяти метров, для удержания их взаимного расположения и ограничения пространственного смещения и изгиба. Материалом матричного держателя 4 могут быть полимерные жаростойкие материалы или другие, при этом акустический импеданс материала матричного держателя 4 должен быть меньше акустического импеданса материала вторых акустических волноводов 3 (что обеспечивают независимость колебаний вторых выходных торцов 7 и минимизацию взаимного влияния вторых выходных торцов 7 и самих вторых акустических волноводов 3), а также материал матричного держателя 4 должен быть стойким к воздействию агрессивной среды 1.
В частном случае первый акустический волновод 16 может быть расположен в указанной трубе, заполненной воздухом, или в отдельной дополнительной трубе, заполненной воздухом. При выполнении первого акустического волновода 16 в трубе, заполненной воздухом, или дополнительной трубе, заполненной воздухом, происходит ограничение излучения акустического сигнала боковыми поверхностями первого акустического волновода 16, а также ограничение деформации первого акустического волновода 16 большой длины.
Устройство определения смещений 8 представляет собой устройство, обеспечивающее одновременное для всех вторых акустических волноводов 3 определение (например, посредством измерения или измерения и последующего вычисления) величин смещения вторых выходных торцов 7 и формирование сигналов, соответствующих определённым величинам смещения, для их последующей передачи. В качестве устройства определения смещений 8 могут быть использованы оптические системы, например, сканирующий лазерный виброметр MPV-800 компании Polytec, способный измерять параметры вибрации одновременно в 48 точках (информация о виброметре представлена по ссылке https://www.polytec.com/us/vibrometry/products/full-field-vibrometers/mpv-800-multipoint-vibrometer/, дата обращения 16.05.2018). Указанный многоточечный лазерный виброметр MPV-800 относится к классу виброметров, способных измерять параметры вибрации на всей исследуемой поверхности и работа которых основана на эффекте Допплера и оптической интерференции (https://www.polytec.com/us/vibrometry/products/$full-field-vibrometers/, дата обращения 16.05.2018). Принцип работы указанного лазерного виброметра основан на разделении лазерного луча, отражении и сложении его составляющих при помощи интерферометра, системы линз и зеркал в составе лазерного виброметра (принцип работы подробно рассмотрен в источнике https://www.polytec.com/us/vibrometry/technology/$laser-doppler-vibrometry/$multipoint-vibrometry/, дата обращения 16.05.2018). Также в качестве устройства определения смещений 8 может быть использовано устройство, используемое в известном техническом решении (прототипе) и состоящее из лазера и системы линз и зеркал (часть из которых образует интерферометр Фабри-Перо). Другим вариантом исполнения устройства определения смещений 8 может быть матрица пьезоэлектрических датчиков, количество которых совпадает с количеством вторых акустических волноводов 3. Устройство определения смещений 8 расположено относительно вторых выходных торцов 7 вторых акустических волноводов 3 таким образом, чтобы было обеспечено выполнение его непосредственных функций (например, лазерный виброметр может быть установлен как вблизи вторых выходных торцов 7, так и на удалении от них, а каждый пьезоэлектрический датчик должен непосредственно контактировать с соответствующим ему вторым выходным торцом 7).
Синхрогенератор 11 представляет собой устройство, обеспечивающее передачу различных импульсных сигналов с требуемыми временными сдвигами между ними (согласно определению в Большом энциклопедическом политехническом словаре, https://dic.academic.ru/dic.nsf/polytechnic/1884/генератор, дата обращения 16.05.2018). Синхрогенератор 11 обеспечивает согласованную работу генератора 13 и блока обработки 9.
Переключатель 12 представляет собой устройство, обеспечивающее попеременное замыкание электрических цепей и, соответственно, замену используемой для передачи сигнала электрической цепи (переключатель 12 - контактный коммутационный аппарат, предназначенный для переключения электрических цепей, согласно п.23 ГОСТ 17703-72 Аппараты электрические коммутационные. Основные понятия. Термины и определения). В описываемом техническом решении переключатель 12 обеспечивает попеременную передачу сигналов генератору 13 и блоку обработки 9. При этом переключатель 12 снабжён одним входом и двумя выходами.
Генератор 13 представляет собой устройство, обеспечивающее питание излучателя 14 посредством преобразования энергии, например, промышленной частоты (50 Гц) в энергию электрических колебаний ультразвуковой частоты. В частности, генератор 13 обеспечивает формирование сигнала требуемой частоты и требуемой длительности. В соответствии с Большим Энциклопедическим словарём генератор 13 в общем смысле – это устройство, аппарат, машина, производящие какой-либо продукт, вырабатывающие электрическую энергию либо создающие электрические, электромагнитные, световые или звуковые сигналы - колебания, импульсы (https://dic.academic.ru/dic.nsf/enc3p/99846, дата обращения 16.05.2018)
Блок обработки 9 представляет собой устройство, обеспечивающее необходимую обработку сигнала, получаемого от устройства определения смещений 8, и получение сигнала, соответствующего получаемому изображению. Блок обработки 9 может быть выполнен с обеспечением последовательного выполнения в том числе следующих операций, также отображённых на фиг.2. Получение комплексного частотного спектра в заданном временном окне для каждого сигнала со второго выходного торца 7 второго акустического волновода 3 элемента путём дискретного преобразования Фурье (ДПФ). Полосовая фильтрация сигналов с частотной характеристикой, определяемой параметрами излучающей и регистрирующей систем. Численное обращение волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента. Численное обратное распространение каждой спектральной линии от второго выходного торца 7 ко второму входному торцу 2 для каждого второго акустического волновода 3 путём фазового сдвига, определяемого дисперсионной характеристикой используемых вторых акустических волноводов 3 и их длиной. Расчёт углового спектра поля на плоскости, образованной вторыми входными торцами 2 вторых акустических волноводов 3, для каждой спектральной линии с использованием двумерного пространственного ДПФ. Численное обратное восстановление поля в жидкости в пространственном окне наблюдения перед вторыми входными торцами 2 вторых акустических волноводов 3 для каждой спектральной линии путём свёртки с функцией Грина (передаточной характеристики) свободного поля, определяемой параметрами жидкости, («пропагатор»). Осуществление обратного ДПФ в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения в жидкости. Осуществление обратного ДПФ в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах. Построение изображения объекта по заданным критериям (по уровню «яркости», по контурам изоповерхности по определённым уровням от максимума и др.)
Блок обработки 9 может быть выполнен как отдельное устройство, электрически соединённое с блоком отображения 10, или блок обработки 9 и блок отображения 10 могут быть выполнены как части компьютера.
Блок отображения 10 представляет собой устройство, выполненное с обеспечением возможности отображения изображения объекта, полученного по результатам операций блока обработки 9. В качестве блока отображения 10 может быть использован монитор, принтер или графопостроитель, обеспечивающий графическое отображение полученного изображения объекта.
Элементы устройства соединены между собой следующим образом. Синхрогенератор 11 соединён с входом переключателя 12 с обеспечением возможности передачи к нему стартового сигнала. Один из выходов переключателя 12 соединён с генератором 13, а другой – с блоком обработки 9. Генератор 13 напрямую или через усилитель соединён с излучателем 14 с возможностью передачи ему сигналов. Устройство определения смещений 8 соединено с блоком обработки 9 с обеспечением возможности передачи ему сигналов, а блок обработки 9 в свою очередь соединён с блоком отображения 10. Все энергозависимые элементы подключают к источнику питания.
Осуществление изобретения
В случае использования указанных выше элементов и средств, изобретение реализуется следующим образом (представленное описание объекта иллюстрирует частный случай его исполнения, возможны и иные реализации с использованием признаков данного технического решения).
Способ ультразвуковой визуализации объектов в жидких средах включает излучение акустического сигнала в жидкую среду, размещение входных торцов акустических волноводов (именуемых в тексте описывающем устройство как вторые входные торцы 2 вторых акустических волноводов 3) в зоне распространения отражённого акустического сигнала, передачу акустического сигнала посредством соответствующих акустических волноводов (именуемых в тексте описывающем устройство как вторые акустические волноводы 3), длина которых выбрана обеспечивающей временное разделение сигналов различных мод этих акустических волноводов (именуемых в тексте описывающем устройство как вторые акустические волноводы 3) на соответствующих их выходных торцах (именуемых в тексте описывающем устройство как вторые выходные торцы 7), измерение смещений указанных выходных торцов (именуемых в тексте описывающем устройство как вторые выходные торцы 7), вычисление пространственно-временного распределения сигнала, соответствующего изображению объекта. В частном случае вычисление пространственно-временного распределения сигнала, соответствующего изображению объекта, осуществляется последовательным выполнением операций: получения комплексного частотного спектра в заданном временном окне для каждого сигнала с соответствующего выходного торца (именуемого в тексте описывающем устройство как второй выходной торец 7) соответствующего акустического волновода (именуемого в тексте описывающем устройство как второй акустический волновод 3) путём дискретного преобразования Фурье, полосовой фильтрации сигналов с частотной характеристикой, определяемой параметрами излучающей и регистрирующей систем, численного обращения волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента, численного обратного распространения каждой спектральной линии от соответствующего выходного торца (именуемого в тексте описывающем устройство как второй выходной торец 7) соответствующего акустического волновода (именуемого в тексте описывающем устройство как второй акустический волновод 3) к соответствующему входному торцу (именуемого в тексте описывающем устройство как второй входной торец 2) этого акустического волновода (именуемого в тексте описывающем устройство как второй акустический волновод 3) путём фазового сдвига, определяемого дисперсионной характеристикой используемых соответствующих акустических волноводов (именуемых в тексте описывающем устройство как вторые акустические волноводы 3) и их длиной, расчёта углового спектра поля на плоскости, образованной соответствующими входными торцами (именуемыми в тексте описывающем устройство как вторые входные торцы 2) акустических волноводов (именуемых в тексте описывающем устройство как вторые акустические волноводы 3), для каждой спектральной линии с использованием двумерного пространственного преобразования Фурье, численного обратного восстановления поля в жидкости в пространственном окне наблюдения перед соответствующими входными торцами (именуемыми в тексте описывающем устройство как вторые входные торцы 2) акустических волноводов (именуемых в тексте описывающем устройство как вторые акустические волноводы 3) для каждой спектральной линии путём свёртки с функцией Грина, осуществления обратного двумерного преобразования Фурье в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения, осуществления обратного двумерного преобразования Фурье в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах, построения изображения объекта по результатам предыдущей операции.
При этом устройство для осуществления указанного способа реализуют следующим образом.
Необходимое количество вторых акустических волноводов 3 размещают в матричном держателе 4, формируя таким образом волноводную матрицу 18. В частности, вторые акустические волноводы 3 могут временно закрепить друг относительно друга, например, в форме, и залить их материалом матричного держателя 4 в жидком виде. После отверждения материала матричного держателя 4 волноводную матрицу 18 извлекают из формы. Или вторые акустические волноводы 3 размещают внутри трубы, выполненной из стали, а пространство между ними заполняют воздухом, при этом фиксацию взаимного расположения обеспечивают торцевыми стенками указанной трубы. Первый акустический волновод 16 располагают в дополнительной трубе, заполненной воздухом. Все элементы размещают относительно друг друга и соединяют так, как это описано выше. Однако взаимное расположение и соединение элементов могут обеспечивать непосредственно при использовании.
При помощи предлагаемого технического решения обычно агрессивную среду 1 исследуют на наличие в ней каких-то объектов с возможностью визуализации этих объектов. При этом под агрессивной средой 1 в приведённом описании следует понимать любую жидкость, агрессивной она названа вследствие негативного воздействия на конструкцию и функционирование как минимум излучателя 14 и устройства определения смещений 8. Однако наиболее часто агрессивной средой 1 при использовании технического решения являются высокотемпературные жидкости, расплавленные металлы, коррозионные среды, в том числе щелочные или кислотные. Неагрессивная среда 6 не оказывает негативного влияния на элементы технического решения и обычно представляет собой атмосферу при условиях, близких к стандартным.
При использовании технического решения первый акустический волновод 16 и волноводную матрицу 18 частично размещают в исследуемой агрессивной среде 1 (все остальные элементы размещают в неагрессивной среде 6). При этом первый выходной торец 17 и вторые входные торцы 2 должны быть расположены в агрессивной среде 1, первый входной торец 15 и вторые выходные торцы 7 – в неагрессивной среде 6, а граница раздела сред 5 должна быть расположена между первым входным торцом 15 и первым выходным торцом 17 и между вторыми входными торцами 2 и вторыми выходными торцами 7. Первый акустический волновод 16 и волноводную матрицу 18 ориентируют соответственно первым выходным торцом 17 и вторыми входными торцами 2 в сторону предполагаемого местоположения объекта, причём первый выходной торец 17 и вторые входные торцы 2 располагают как можно ближе к предполагаемому местоположению объекта. При этом обычно первый акустический волновод 16 и волноводную матрицу 18 размещают с одной стороны от предполагаемого местоположения объекта. Если это не было выполнено заранее, то на вторых выходных торцах 7 устанавливают устройство определения смещений 8, на первом входном торце 15 устанавливают излучатель 14, и электрически соединяют излучатель 14, генератор 13, переключатель 12, синхрогенератор 11, устройство определения смещений 8, блок обработки 9 и блок отображения 10 так, как это описано выше.
В начальном положении переключатель 12 замыкает электрическую цепь так, что стартовый импульсный сигнал от синхрогенератора 11 через переключатель 12 передают генератору 13. При получении стартового импульсного сигнала генератор 13 формирует сигнал с требуемыми характеристиками, который затем направляют напрямую или, при необходимости, через усилитель излучателю 14. Излучатель 14 преобразует полученный сигнал и генерирует акустическое излучение, которое вследствие установки излучателя 14 на первом входном торце 15 распространяется преимущественно по первому акустическому волноводу 16. При этом за счёт расположения первого акустического волновода 16 в дополнительной трубе, заполненной воздухом, обеспечивают распространение акустического сигнала вдоль первого акустического волновода 15 и излучение его первым выходным торцом 17, блокируя при этом его излучение боковыми поверхностями первого акустического волновода 16. После достижения первого выходного торца 17 акустическое излучение излучается в агрессивную среду 1. После окончания излучения переключатель 12 переключается и замыкает электрическую цепь так, что соответствующий стартовый импульсный сигнал от синхрогенератора 1 через переключатель 12 передают блоку обработки 9.
Распространяясь в агрессивной среде 1, акустическое излучение частично рассеивается или отражается от объекта в агрессивной среде 1. Это акустическое излучение воздействует на вторые входные торцы 2 вторых акустических волноводов 3 в волноводной матрицы 18 и, частично отражаясь обратно в агрессивную среду 1, вызывает генерацию упругих мод в каждом втором акустическом волноводе 3. В зависимости от соотношения параметров каждого второго акустического волновода 3, расположенного между ними матричного держателя 4 (плотность материалов, поперечные размеры вторых акустических волноводов 3, расстояние между вторыми акустическими волноводами 3, скорости продольных и сдвиговых волн, температурный градиент) и параметров акустического излучения (спектральный состав, длительность импульса) в каждом из вторых акустических волноводов 3 будет генерироваться различное количество упругих мод. В предлагаемом техническом решении предпочтительно использование вторых акустических волноводов 3 с минимальным количеством мод, включающим только одну квазипродольную моду. Например, твердотельные вторые акустические волноводы 3 минимально характеризуются одной изгибной и одной квазипродольной модами. Сгенерированные упругие моды в каждом втором акустическом волноводе 3 после воздействия на вторые входные торцы 2 рассеянного от объекта излучения будут распространяться вдоль оси каждого второго акустического волновода 3 с ослаблением, определяемым затуханием мод в материале вторых акустических волноводов 3 и их утечкой в материал матричного держателя 4. По мере распространения изгибная мода и квазипродольная мода будут разделяться вследствие разной скорости их распространения согласно дисперсионным зависимостям для каждого типа второго акустического волновода 3, определяемого его размерами и материалом. Длина вторых акустических волноводов 3 и разность скоростей распространения квазипродольной и изгибной мод будут определять интервал времени для получения изображения объекта по квазипродольной моде. В каждом втором акустическом волноводе 3 первой до второго выходного торца 7 дойдёт квазипродольная мода, вызвав тем самым осевые колебания (смещения) второго выходного торца 7, которые регистрируются устройством определения смещений. Изгибные моды негативно влияют на качество получаемого изображения, поэтому увеличение длины вторых акустических волноводов 3 с целью увеличения интервала времени для определения смещений будет способствовать повышению качества получаемого изображения.
Устройство определения смещений 8 после получения данных о величинах смещений всех вторых выходных торцов 7 формирует соответствующий сигнал, который направляет блоку обработки 9. Блок обработки 9 при получении стартового импульсного сигнала от синхрогенератора 11 проводит обработку сигнала, полученного от устройства определения смещений 8. При этом блок обработки 9 должен содержать данные о характеристиках вторых акустических волноводов 3 и акустического излучения от излучателя 14, чтобы сформировать данные о интервале времени, когда вторых выходных торцов 7 достигли только квазипродольные моды, и учесть их при обработке сигнала. Обработка сигнала может заключаться в последовательном выполнении следующих математических операций.
1.Получение комплексного частотного спектра в заданном временном окне для каждого сигнала со второго выходного торца 7 второго акустического волновода 3 элемента путём дискретного преобразования Фурье (ДПФ).
2. Полосовая фильтрация сигналов с частотной характеристикой, определяемой параметрами излучающей и регистрирующей систем.
3. Численное обращение волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента.
4. Численное обратное распространение каждой спектральной линии от второго выходного торца 7 ко второму входному торцу 2 для каждого второго акустического волновода 3 путём фазового сдвига, определяемого дисперсионной характеристикой используемых вторых акустических волноводов 3 и их длиной.
5. Расчёт углового спектра поля на плоскости, образованной вторыми входными торцами 2 вторых акустических волноводов 3, для каждой спектральной линии с использованием двумерного пространственного ДПФ.
6. Численное обратное восстановление поля в жидкости в пространственном окне наблюдения перед вторыми входными торцами 2 вторых акустических волноводов 3 для каждой спектральной линии путём свёртки с функцией Грина (передаточной характеристики) свободного поля, определяемой параметрами жидкости, («пропагатор»).
7. Осуществление обратного ДПФ в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения в жидкости.
8. Осуществление обратного ДПФ в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах
9. Построение изображения объекта по заданным критериям (по уровню «яркости», по контурам изоповерхности по определённым уровням от максимума и др.)
После проведения всей необходимой обработки блок обработки 9 формирует сигнал, соответствующий полученному изображению объекта, и передаёт его блоку отображения 10. Блок отображения 10 при помощи соответствующих необходимых преобразований отображает полученный сигнал на своём дисплее или распечатывает полученное изображение, что для пользователя соответствует полученному изображению объекта.
Таким образом, выполнение вторых акустических волноводов 3 и первого акустического волновода 16 достаточно длинными, чтобы первый выходной торец 17 и вторые входные торцы 2 были расположены в агрессивной среде 1, а первый входной торец 15 и вторые выходные торцы 7 – в неагрессивной среде 6, обеспечивает упрощение конструкции. Это связано с тем, что при такой конструкции в агрессивной среде 1 не расположено других элементов, кроме волноводной матрицы 18 и первого акустического волновода 16. Соответственно, отсутствует необходимость выполнения как минимум устройства определения смещений 8 и излучателя 14 стойкими к воздействию агрессивной среды 1 или дополнительного изготовления защитного герметичного корпуса для указанных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ультразвуковой визуализации объектов в жидких средах (варианты) | 2017 |
|
RU2650348C1 |
| Акустический профилограф для получения изображения поверхности дна (варианты) | 2017 |
|
RU2682081C2 |
| Система обеспечения посадки вертолёта (варианты) | 2017 |
|
RU2674283C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2308228C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ СТРУКТУР МОЗГА ЧЕРЕЗ ТОЛСТЫЕ КОСТИ ЧЕРЕПА | 2015 |
|
RU2636851C2 |
| УНИВЕРСАЛЬНЫЙ ПОЛНОСТЬЮ ОПТИЧЕСКИЙ ЛОГИЧЕСКИЙ ЭЛЕМЕНТ | 2021 |
|
RU2756257C1 |
| АНАЛИЗАТОР ПОЛЯ ИЗЛУЧЕНИЯ | 1997 |
|
RU2155356C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛАЗЕРНОГО ДИОДА С ПОВЫШЕННОЙ ЯРКОСТЬЮ ИЗЛУЧЕНИЯ | 2011 |
|
RU2477915C1 |
| Способ анализа спектрально-временной эволюции излучения | 2016 |
|
RU2646940C1 |
| САПФИРОВЫЙ ТЕРАГЕРЦОВЫЙ ФОТОННО-КРИСТАЛЛИЧЕСКИЙ ВОЛНОВОД | 2015 |
|
RU2601770C1 |
Использование: для ультразвуковой визуализации (УЗВ) объектов, расположенных в жидких средах. Сущность изобретения заключается в том, что первый акустический волновод 16 и волноводную матрицу 18 частично размещают в исследуемой агрессивной среде 1 (все остальные элементы размещают в неагрессивной среде 6). При этом первый выходной торец 17 и вторые входные торцы 2 должны быть расположены в агрессивной среде 1, первый входной торец 15 и вторые выходные торцы 7 в неагрессивной среде 6, а граница раздела сред 5 должна быть расположена между первым входным торцом 15 и первым выходным торцом 17 и между вторыми входными торцами 2 и вторыми выходными торцами 7. Первый акустический волновод 16 и волноводную матрицу 18 ориентируют соответственно первым выходным торцом 17 и вторыми входными торцами 2 в сторону предполагаемого местоположения объекта, причём первый выходной торец 17 и вторые входные торцы 2 располагают как можно ближе к предполагаемому местоположению объекта. При этом обычно первый акустический волновод 16 и волноводную матрицу 18 размещают с одной стороны от предполагаемого местоположения объекта. Если это не было выполнено заранее, то на вторых выходных торцах 7 устанавливают устройство определения смещений 8, на первом входном торце 15 устанавливают излучатель 14, и электрически соединяют излучатель 14, генератор 13, переключатель 12, синхрогенератор 11, устройство определения смещений 8, блок обработки 9 и блок отображения 10. Технический результат: обеспечение возможности упрощения конструкции. 2 н. и 2 з.п. ф-лы, 2 ил.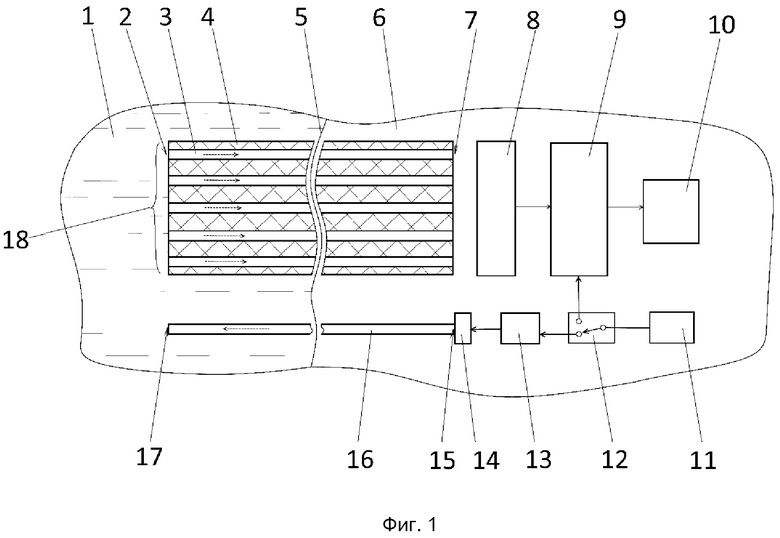
1. Способ ультразвуковой визуализации объектов в жидких средах, включающий излучение акустического сигнала в жидкую среду, размещение входных торцов акустических волноводов в зоне распространения отражённого акустического сигнала, передачу акустического сигнала посредством соответствующих акустических волноводов, длина которых выбрана обеспечивающей временное разделение сигналов различных мод этих акустических волноводов на соответствующих их выходных торцах, измерение смещений указанных выходных торцов, вычисление пространственно-временного распределения сигнала, соответствующего изображению объекта, при этом вычисление пространственно-временного распределения сигнала, соответствующего изображению объекта, осуществляется последовательным выполнением операций: получения комплексного частотного спектра в заданном временном окне для каждого сигнала с соответствующего выходного торца соответствующего акустического волновода путём дискретного преобразования Фурье, полосовой фильтрации сигналов с частотной характеристикой, определяемой параметрами излучающей и регистрирующей систем, численного обращения волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента, численного обратного распространения каждой спектральной линии от соответствующего выходного торца соответствующего акустического волновода к соответствующему входному торцу этого акустического волновода путём фазового сдвига, определяемого дисперсионной характеристикой используемых соответствующих акустических волноводов и их длиной, расчёта углового спектра поля на плоскости, образованной соответствующими входными торцами акустических волноводов, для каждой спектральной линии с использованием двумерного пространственного преобразования Фурье, численного обратного восстановления поля в жидкости в пространственном окне наблюдения перед соответствующими входными торцами акустических волноводов для каждой спектральной линии путём свёртки с функцией Грина, осуществления обратного двумерного преобразования Фурье в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения, осуществления обратного двумерного преобразования Фурье в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах, построения изображения объекта по результатам предыдущей операции.
2. Устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах для реализации способа ультразвуковой визуализации объектов в жидких средах по п. 1, содержащее первый акустический волновод с первым входным торцом и первым выходным торцом, устройство определения смещений, блок обработки, синхрогенератор, переключатель, генератор, излучатель, блок отображения, волноводную матрицу, содержащую матричный держатель и вторые акустические волноводы, каждый из которых снабжён вторым входным торцом и вторым выходным торцом и закреплён в матричном держателе, причём излучатель присоединён к первому входному торцу первого акустического волновода, устройство определения смещений размещено с обеспечением возможности определения величин смещения вторых выходных торцов вторых акустических волноводов, а синхрогенератор электрически соединён с входом переключателя, один из выходов переключателя электрически соединён с генератором, а другой выход переключателя соединён с блоком обработки, выход генератора электрически соединён с излучателем, выход устройства определения смещений электрически соединён с входом блока обработки, а выход блока обработки электрически соединён с блоком отображения, при этом блок обработки выполнен с обеспечением возможности последовательного выполнения операций: вычисления комплексного частотного спектра в заданном временном окне для каждого сигнала со второго выходного торца второго акустического волновода путём дискретного преобразования Фурье, полосовой фильтрации вычисленных сигналов, численного обращения волнового фронта путём операции комплексного сопряжения спектральных функций для каждого элемента, численного обратного распространения каждой спектральной линии от соответствующего выходного торца соответствующего акустического волновода к соответствующему входному торцу этого акустического волновода путём фазового сдвига, определяемого дисперсионной характеристикой используемых соответствующих акустических волноводов и их длиной, расчёта углового спектра поля на плоскости, образованной соответствующими входными торцами акустических волноводов, для каждой спектральной линии с использованием двумерного пространственного преобразования Фурье, численного обратного восстановления поля в жидкости в пространственном окне наблюдения перед соответствующими входными торцами акустических волноводов для каждой спектральной линии путём свёртки с функцией Грина, осуществления обратного двумерного преобразования Фурье в двумерном пространстве волновых чисел для получения пространственного распределения акустического поля в окне наблюдения, осуществления обратного двумерного преобразования Фурье в частотном пространстве для восстановления полного пространственно-временного распределения поля в заданных трёхмерном пространственном и временном окнах.
3. Устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах по п. 2, отличающееся тем, что матричный держатель выполнен в виде трубы, вторые акустические волноводы расположены внутри трубы, которая заполнена воздухом.
4. Устройство ультразвуковой визуализации объектов в высокотемпературных жидких средах по п. 3, отличающееся тем, что первый акустический волновод расположен в трубе.
| Устройство ультразвуковой визуализации объектов в жидких средах (варианты) | 2017 |
|
RU2650348C1 |
| ПРЕОБРАЗОВАТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ПРИЕМА/ПЕРЕДАЧИ УЛЬТРАЗВУКОВЫХ КОЛЕБАНИЙ В СРЕДЕ ЖИДКОГО НАТРИЯ, ПРИЕМНАЯ/ПЕРЕДАЮЩАЯ РЕШЕТКА, АНТЕННА, СПОСОБ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ И УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ В ОПТИЧЕСКИ НЕПРОЗРАЧНОЙ СРЕДЕ | 1997 |
|
RU2186408C2 |
| Способ определения добротности излучателя ультразвука | 1977 |
|
SU678725A1 |
| US 20130084579 A1, 04.04.2013. | |||

