Область техники, к которой относится изобретение
Настоящее изобретение относится к измерению массы частиц в составе аэрозоля.
Уровень техники, к которой относится изобретение
Загрязнение воздуха аэрозольными частицами, в частности, твердыми частицами, размеры которых составляют менее 2,5 мкм в диаметре (называемые термином "ТЧ2,5"), представляют собой большую проблему для таких стран, как Китай, где скорость индустриализации выходит за границы установленных требований.
Вследствие расширения прав и возможностей потребителей повышается спрос на информацию в отношении качества воздуха в жилых помещениях. В частности, в Китае чрезмерное загрязнение ТЧ2,5 превратилось в общую проблему в последнее десятилетие. Данную проблему также подтверждают результаты непрерывных измерений в различных китайских городах. Эта информация является общедоступной и может непрерывно контролироваться посредством приложений для мобильных телефонов или через сеть.
Доступность этой информации, а также постоянное внимание со стороны национальных и международных средств массовой информации обеспечили высокую степень ознакомления потребителей с данной проблемой.
Согласно официальным стандартам качества атмосферного воздуха, концентрация твердых частиц определяется как массовая концентрация на единицу объема (например, мкг/м3). Средний уровень загрязнения ТЧ2,5 в материковом Китае вычисляли на основании данных, полученных со спутников, и было обнаружено, что на большей части страны он превышает предельные уровни Всемирной организации здравоохранения в 10 мкг/м3, с некоторыми областями, где концентрации ТЧ2,5 приближаются к уровню 100 мкг/м3 и даже превышают его.
Стандартизированные эталонные способы измерения основаны на измерении массы осаждающихся или захватываемых частиц в расчете на объем образца воздуха, например, с помощью сужающегося резонатора, пробоотборника частиц атмосферного воздуха или взвешиваемых фильтров и сит.
Однако для эксплуатации этих систем требуется профессиональное руководство в целях осуществления ручной части измерений (например, взвешивание фильтра и сита), и/или периодическое обслуживание для очистки накапливающейся массы, поддержания работоспособности различных компонентов системы и повторной калибровки. Кроме того, эти системы, как правило, имеют большие размеры для настольной установки и не подходят для потребительских приложений.
Был предложен контроль за аэрозольными загрязнениями посредством измерения массы на основе резонанса. Например, было предложено использование микромеханического устройства на основе кремниевого кантилевера с разрешением масс на уровне пикограмм для индивидуального контроля предельно допустимых концентраций. Для отделения крупных частиц могут использоваться фильтры, и может быть предусмотрен электростатический пробоотборник для осаждения наночастиц на кантилевер. Например, документ WO 2013/064157 раскрывает резонансное устройство с микроэлектромеханической системой (МЭМС) для измерения частиц, предназначенное для измерения аэрозольных наночастиц в воздушном потоке.
Однако проблема резонансного устройства для измерения частиц заключается в том, что не может быть точно определено окончание срока службы, и, таким образом, пользователь может заменять датчик слишком рано или слишком поздно.
Публикация патентной заявки США № US 20030123059A1 раскрывает способ и устройство для определения нелетучего компонента аэрозольных частиц в газообразном образце. В частности, согласно датчику массы, предварительно устанавливается масса максимальной нагрузки для микровесов, и вызывается регенерация посредством нагревания, когда осаждается максимальная массовая нагрузка. Однако изменение массы на чувствительном элементе в каждом цикле измерения не очень хорошо контролируется.
Таким образом, требуется датчик массы, который может иметь почти постоянный срок службы независимо от среды, в которой используется датчик, и улучшенный контроль изменения массы в каждом измерительном цикле, предпочтительно с меньшим изменением массы в цикле измерения в случае высокой концентрации загрязняющих веществ.
Сущность изобретения
Данное изобретение определяется формулой изобретения.
Согласно варианту осуществления данного изобретения, предлагается датчик массы для измерения массы частиц в аэрозоле, содержащий:
чувствительный элемент;
детектор для измерения массы частиц, осажденных на чувствительном элементе, причем частицы осаждаются на чувствительный элемент в течение цикла измерения; и
контроллер для управления детектором в течение цикла измерения,
причем данный контроллер выполнен с возможностью задания продолжительности цикла измерения таким образом, что в течение цикла измерения обеспечивается предварительно заданное изменение массы, вызываемое осаждаемыми частицами.
Осаждение частиц на датчике предпочтительно ограничивается продолжительностью циклов измерения. Аэрозоль может представлять собой воздух или любой другой газ с захваченными частицами.
Датчик данной конструкции регулируется таким образом, что измерение осуществляется до тех пор, пока предварительная заданная (дополнительная) масса частиц не осаждается на чувствительный элемент.
Таким образом, для низких концентраций частиц продолжительность измерения дольше, а для высоких концентраций частиц продолжительность измерения короче. При отсутствии очистки или обслуживания срок службы датчика зависит от суммарной осажденной массы. В результате этого срок службы становится практически постоянным, потому что каждая операция измерения приводит к постоянной величине массы осажденных частиц (т.е. к предварительно заданному изменению массы). Это означает, что срок службы может прогнозироваться точнее. Кроме того, это означает, что изменение массы для каждого цикла измерения может уменьшаться по сравнению с изменением массы, которое можно было бы прогнозировать на основании фиксированной продолжительности измерения, когда частицы присутствуют в высокой концентрации.
Разумеется, в случае чрезвычайно низких концентраций цикл измерения может завершаться даже до того, как достигается предварительно заданное изменение массы. Таким образом, в этом случае предварительно заданное изменение массы определяется для концентрации частиц выше порогового уровня. В таком случае выходной сигнал датчика может показывать, что массовая концентрация частиц находится ниже определенного порогового уровня. Отклонение от постоянной массы для таких циклов не приводит к значительному изменению в отношении прогнозируемого срока службы, потому что оно относится только к циклам измерения, когда имеется очень небольшая масса осажденных частиц.
Контроллер может быть выполнен с дополнительной возможностью:
определения из продолжительности цикла измерения объема отбираемого образца аэрозоля и вычисления в результате этого концентрации частиц на единицу объема.
Это делает возможным преобразование измеряемой массы в массовую концентрацию.
В одном варианте осуществления детектор содержит преобразовательный элемент для приведения чувствительного элемента в резонанс и измерения резонансной частоты чувствительного элемента, причем резонансная частота зависит от массы частиц, осажденных на чувствительный элемент.
Согласно данному варианту осуществления, используется резонансный датчик массы. Это может быть реализовано при низкой стоимости, например, потребительского устройства, а также при небольших размерах, которые допускают портативное/мобильное применение.
Кроме того, контроллер может быть дополнительно предназначен для:
измерения первоначальной резонансной частоты;
вычисления сдвига резонансной частоты, соответствующего предварительно заданному изменению массы; и
контроля резонансной частоты для задания продолжительности цикла измерения.
Таким образом, датчик в сущности повторно калибруют для каждого цикла измерения.
Может использоваться любой резонансный датчик, который обеспечивает достаточное разрешение по массе, например, от пикограммов до миллиграммов. Чувствительный элемент может содержать, например, датчик с микроэлектромеханической системой (МЭМС-датчик). Это обеспечивает изготовление имеющего низкую стоимость и компактного датчика.
МЭМС-чувствительный элемент может быть выполнен как резонатор в форме зажатой с обоих концов балки или резонатор в форме зажатой с одного конца балки.
Для всех вариантов осуществления отбор образцов может обеспечиваться воздушным потоком, приводимым в действие прибором, в котором находится датчик, например, очистителем воздуха. Альтернативно, отбирающее образцы устройство может быть выполнено с возможностью работы в течение цикла измерения и перемещения контролируемого аэрозоля к чувствительному элементу. В таком случае датчик подвергается воздействию содержащего твердые частицы аэрозоля только в течение операции измерения, так что увеличивается срок службы датчика.
Отбирающее образцы устройство может представлять собой вентилятор или насос, который может быть оборудован электростатическим притягивающим приспособлением, которое способствует более эффективному осаждению частиц на чувствительный элемент. Дополнительные альтернативы включают гравитационное осаждение частиц или термофоретическое осаждение, или использование естественной конвекции.
Отфильтровывающее частицы приспособление или аэродинамический сепаратор (например, инерционный сепаратор, виртуальный инерционный сепаратор и т.д.) может использоваться для определения диапазона размеров частиц, для которых предполагается контроль массовой концентрации частиц в аэрозоле. Это означает, что массовая концентрация может измеряться только для представляющего интерес диапазона размеров частиц.
Вариант осуществления изобретения также обеспечивает способ измерения массы частиц в аэрозоле, включающий:
измерение массы частиц, осажденных на чувствительный элемент в течение цикла измерения; и
задание продолжительности цикла измерения таким образом, что в течение цикла измерения обеспечивается предварительно заданное изменение массы, вызываемое осажденными частицами.
Датчик может эксплуатироваться данным способом до тех пор, пока определенная масса частиц не осаждается на чувствительный элемент. Как разъясняется выше, данный способ обеспечивает практически постоянный срок службы, так что он может прогнозироваться точнее.
Данное изобретение также предлагает устройство обработки воздуха, содержащее датчик массы по изобретению.
Краткое описание чертежей
Далее будут подробно описаны примеры изобретения со ссылкой на сопровождающие чертежи, на которых:
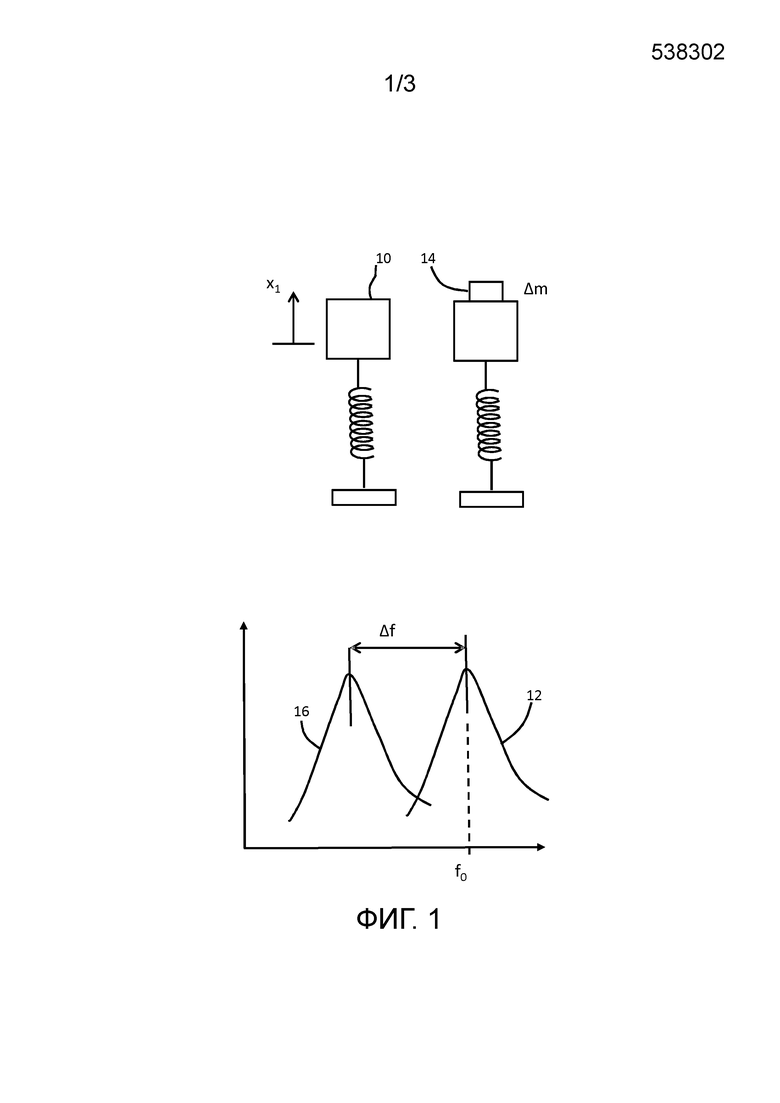
Фигура 1 представляет основные аспекты измерения массы на основе резонанса, разъясненные с помощью системы масса-пружина, где масса датчика-резонатора влияет на резонансную частоту;
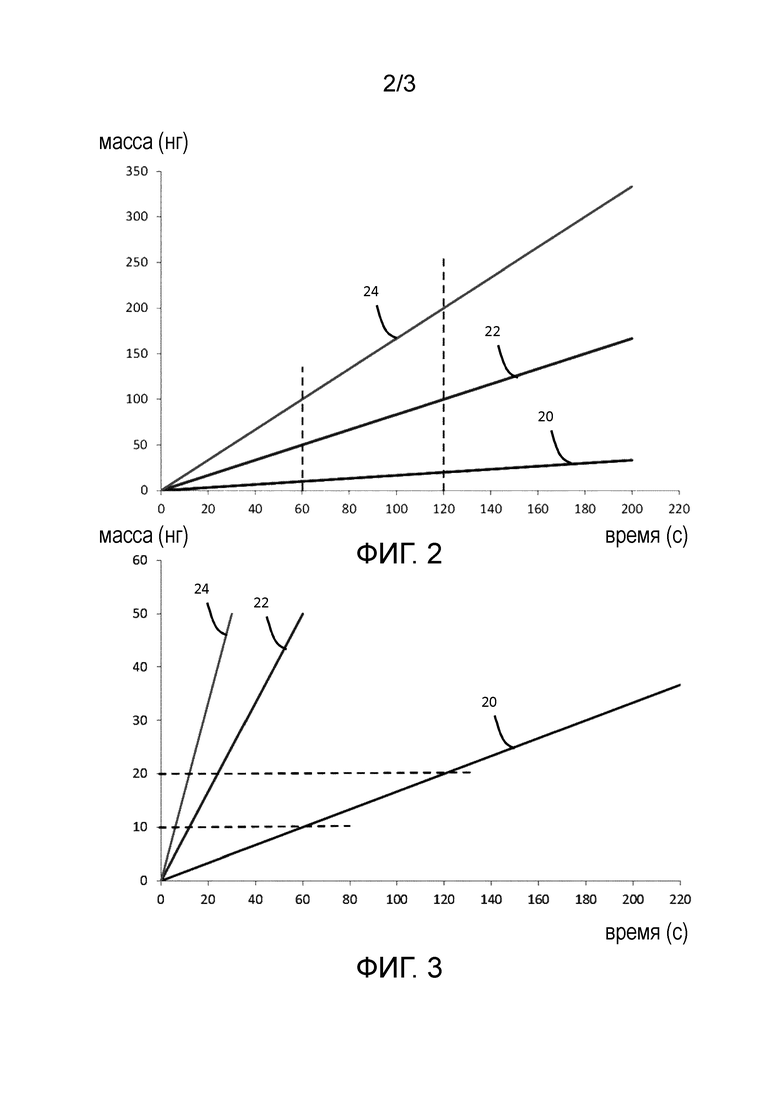
Фигура 2 представляет традиционный подход к отбору образцов аэрозоля в течение фиксированного периода времени;
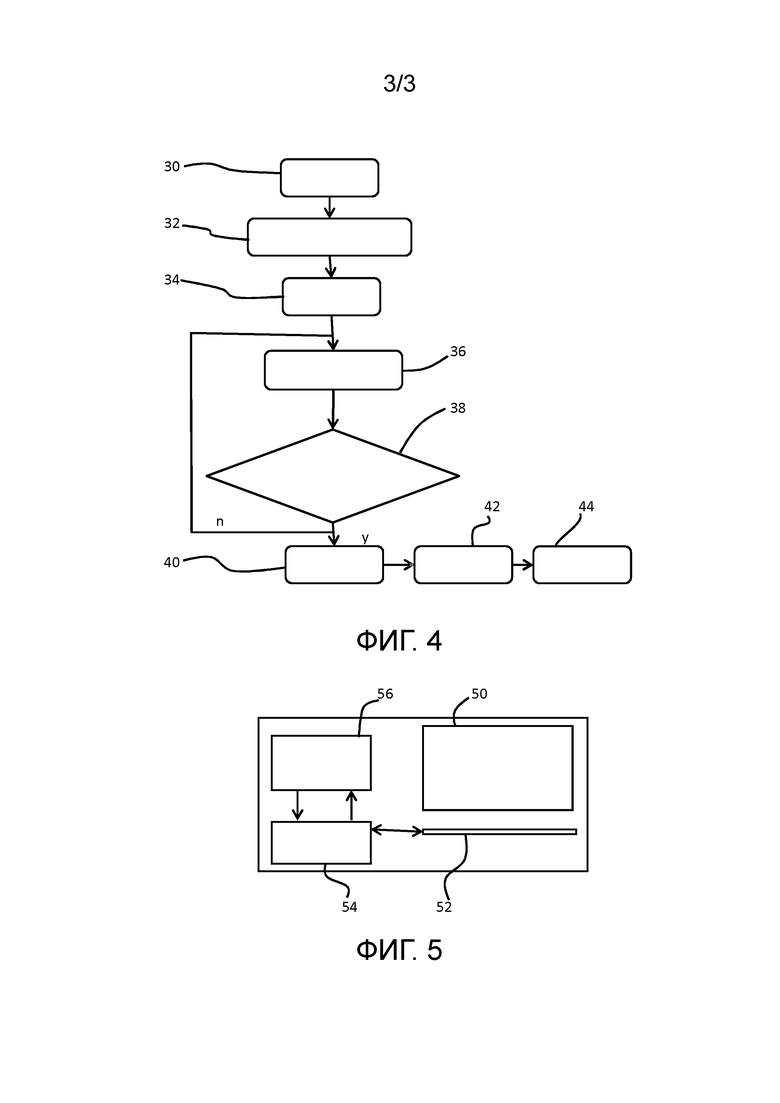
Фигура 3 представляет подход к отбору образцов аэрозоля с накоплением фиксированной массы по варианту осуществления изобретения;
Фигура 4 представляет способ по варианту осуществления изобретения; и
Фигура 5 представляет датчик по варианту осуществления изобретения.
Подробное описание вариантов осуществления
Изобретение предлагает датчик массы для измерения массы частиц в составе аэрозоля. Продолжительность цикла измерения устанавливается таким образом, что обеспечивается предварительно заданное изменение массы, вызываемое осажденными частицами. При отсутствии очистки срок службы датчика зависит от суммарной массы осажденных частиц. В результате осуществления этого подхода срок службы становится практически постоянным, потому что каждая измерительная операция выполняется, имея в результате постоянную величину массы осажденных частиц. Это означает, что срок службы может прогнозироваться точнее.
Помимо МЭМС-датчика, описанного в WO 2013/064157, другие подходы к определению массы отбираемого образца включают измерение теплоемкости накапливающейся массы или измерение ослабления сигнала запроса, что использует, например, устройство, измеряющее ослабление бета-излучения.
Проблема всех эти измерительных подходов заключается в том, что существует предел измерения, который достигается, когда накапливающаяся масса превышает определенный уровень. Например, накапливающаяся масса в течение цикла измерения составляет меньшую долю суммарной накапливающейся массы, так что система, в конечном счете, достигает предельного разрешения.
Например, датчики массы, действие которых основано на резонансе, эксплуатируются в диапазоне, где дополнительная масса является небольшой по сравнению с первоначальной массой резонатора. Однако непрерывное накопление массы в течение срока службы датчика является неизбежным. Эта проблема становится более выразительной в случае МЭМС-взвешивающих устройств, в которых механическая и/или химическая очистка накапливающейся массы невозможна, по меньшей мере, для потребительских приложений.
Таким образом, срок службы МЭМС-датчика массы может грубо оцениваться посредством учета первоначальной массы и приблизительной массы, которая осаждается в течение одного цикла измерения.
Возникает проблема, заключающаяся в том, что осаждающаяся масса зависит от среды, в которой используется данное устройство, и эта проблема распространяется на все датчики, которые измеряют накапливающуюся массу. Это делает затруднительным прогнозирование срока службы устройства и/или сроков профилактического обслуживания. Для решения вышеупомянутых проблем разработаны способы и датчики согласно вариантам осуществления изобретения.
Далее настоящее изобретение будет подробно описано со ссылкой на резонансный датчик массы. Однако могут использоваться и другие подходы к измерению массы, которые могут также оказываться благоприятными, исходя из изобретения.
Непосредственное измерение массы с использованием резонансных устройств представляет собой известную технологию. Она основана на соотношении между резонансной частотой (f0) и массой резонатора, которое представлено на фиг. 1.
На фиг. 1 схематически представлены масса 10 резонатора, а также масса m и коэффициент жесткости k пружины. Данный график представляет амплитуду резонансных колебаний (на оси y) в зависимости от частоты (ось x). График 12 соответствует основной массе резонатора. Если возникает дополнительная масса 14 (Δm), кривая колебаний сдвигается вниз по частоте к графику 16, причем сдвиг частоты составляет Δf.
Уравнения, которые определяют резонансные колебания, представляют собой:

Уравнение 1 представляет соотношение между основной резонансной частотой и характеристиками резонатора. Уравнение 2 представляет изменение частоты, вызываемое изменением массы, и уравнение 3 представляет минимальное изменение массы (Δmmin), которое может быть обнаружено. Данное минимальное значение зависит от механической добротности Q резонатора.
В литературе представлены несколько примеров резонансного измерения массы для контроля аэрозольных загрязнений. Например, было предложено использование микромеханического устройства на основе кремниевого кантилевера, обеспечивающего пикограммовый уровень разрешения массы для личного контроля воздействий. Могут использоваться фильтры для отделения крупных частиц, и может быть предусмотрен электростатический пробоотборник для осаждения наночастиц на кантилевер.
Например, в WO 2013/064157 раскрыто МЭМС-резонансное устройство для измерения частиц, предназначенное для измерения аэрозольных наночастиц в воздушном потоке.
В качестве обычного правила, датчики массы эксплуатируются в диапазоне, в котором дополнительная масса является небольшой по сравнению с первоначальной массой резонатора. Однако в течение срока службы датчика неизбежно происходит непрерывное накопление массы. Эта проблема становится более выраженной в случае МЭМС-взвешивающих устройств, в которых механическая и/или химическая очистка накапливающейся массы невозможна, по меньшей мере, для потребительских приложений. Таким образом, срок службы МЭМС-датчика массы может грубо оцениваться посредством учета первоначальной массы и приблизительной осаждающейся массы в течение одного цикла измерения.
В качестве примера ниже представлено краткое вычисление для кремниевого МЭМС-кантилевера:
Размеры: ширина 100 мкм, длина 1000 мкм, толщина 10 мкм
Объем: 106 мкм3
Масса: 2650 нг (плотность кремния 2,65 г/см3)
Для минимальной обнаруживаемой концентрации частиц, составляющей 10 мкг/м3 (эту предельную среднегодовую концентрацию определила Всемирная организация здравоохранения), и объема образца воздуха, составляющего 1 литр (отбор образца воздуха осуществляется в течение одной минуты с расходом 1 л/мин), обоснованная оценка осаждающейся массы на резонаторе составляет 10 нг. При увеличении концентрации осаждающаяся масса пропорционально увеличивается. Это приводит к ряду циклов измерения для удвоения первоначальной массы резонатора, что зависит от значений концентрации, как кратко представлено ниже:
Концентрация ТЧ2,5 может достигать нескольких сотен мкг/м3 (например, 700 мкг/м3 в Пекине, 13 января 2013 г.), так что в результате этого срок службы может дополнительно сокращаться, что является неподходящим для использования таких систем для применений на потребительском уровне.
Измерительная система может быть выполнена с возможностью определения средней концентрации частиц в течение эксплуатационного срока службы. Однако значительные изменения в концентрации всегда вызывают риск преждевременного и непрогнозируемого окончания эксплуатационного срока службы.
Традиционный способ использования системы с датчиком массы основан на измерении концентрация накапливающейся массы для заданного объема образца. Это измерение осуществляется посредством сравнения резонансной частоты датчика в начале и в конце цикла измерения и корреляции сдвига частоты с изменением массы (Δm).
Для этого требуется определенное время отбора образцов, например, посредством протекания воздуха над датчиком в течение заданного периода времени.
Фиг. 2 представляет традиционный способ считывания датчика и представляет накапливающуюся массу в зависимости от времени.
График 20 соответствует низкой концентрации, составляющей 10 мкг/м3, график 22 соответствует средней концентрации, составляющей 50 мкг/м3, и график 24 соответствует высокой концентрации, составляющей 100 мкг/м3.
Как можно видеть на чертеже, накапливающаяся масса для заданного времени отбора образца (например, 60 секунд и 120 секунд, как представлено) зависит от концентрации.
Таким образом, срок службы датчика массы, который работает посредством обнаружения изменений резонансной частоты, в значительной степени зависит от концентрации твердых частиц. Изменения уровня загрязнения создает проблему невозможности прогнозирования срока службы; следовательно, ограничивает применимость этих датчиков для потребительских применений.
Фиг. 3 используется для разъяснения подхода к измерению согласно вариантам осуществления изобретения. Здесь также график 20 соответствует низкой концентрации, составляющей 10 мкг/м3, график 22 соответствует средней концентрации, составляющей 50 мкг/м3, и график 24 соответствует высокой концентрации, составляющей 100 мкг/м3. Эти графики представлены с иными углами наклона по сравнению с фиг. 2, чтобы предоставить возможность более четкого рассмотрения данного способа.
Датчик регулируется для задания продолжительности цикла измерения таким образом, что в течение цикла измерения обеспечивается предварительно заданное изменение массы, вызываемое осажденными частицами. На фиг. 3 представлены два примера для накапливающейся массы, составляющей 10 нг и 20 нг.
Процедура эксплуатации этого датчика обеспечивает определенный срок службы датчика массы. Для датчика определяется фиксированное значение накапливающейся массы и используется переменная продолжительность операции отбора образцов. Таким образом, измерительная система обеспечивает кратковременный отбор образцов для высокой концентрации и продолжительное время отбора образцов в случае низкой концентрации. Концентрация затем вычисляется по полному объему образца после того, как достигается заданная накапливающаяся масса.
Максимальная продолжительность отбора образцов может устанавливаться так, что отбор образцов заканчивается в определенный момент времени даже для чрезвычайно низких концентраций. В этом случае выходной сигнал датчика будет показывать, что концентрация находится ниже порогового значения, а не давать абсолютное значение. Таким образом, имеющий постоянную массу образец применяют для концентрации частиц выше порогового значения, а ниже этого порогового значения может применяться максимальная продолжительность отбора образцов. Концентрация может, например, представлять собой наименьшую концентрацию, которая должна обнаруживаться для конкретного применения, и будет соответственно выбираться продолжительность максимального времени отбора образцов. Таким образом, не представляет интереса фактический уровень концентрации ниже данного порогового значения. Введение диапазона фиксированных продолжительностей времени отбора образцов для низких концентраций будет приводить к увеличению срока службы датчика за пределы конструктивного срока службы, определяемого только на основании непрерывных измерений массы.
Как можно увидеть из фиг. 3, продолжительность отбора образцов, которая требуется для достижения определенной накапливающейся массы, обратно пропорциональна уровню загрязнения воздуха. Это предотвращает чрезмерное накопление массы на резонаторе, которое вызывает короткий и непрогнозируемый срок службы. Хотя заданная масса в данном примере составляет 10 нг или 20 нг, разумеется, эти значения могут выбираться в зависимости от конкретной конструкции резонатора.
Фиг. 4 представляет порядок вычисления концентрации твердых частиц в воздухе.
На этапе 30 измеряют первоначальную резонансную частоту (f0) (т.е. в момент времени t0).
На этапе 32 вычисляют сдвиг (Δf) резонансной частоты, который определяют на основании заданной накапливающейся массы (Δm). При этом определяется целевое значение сдвига резонансной частоты, Δftarget.
Это целевое значение может быть получено на основе вычислений, или, в качестве альтернативы, может использоваться таблица преобразований.
Цикл начинается на этапе 34, например, при начале введения воздуха (например, с помощью вентилятора с известным расходом воздуха). На этапе 36 резонансную частоту непрерывно контролируют так, что контролируется изменение резонансной частоты Δf.
Когда достигается ранее вычисленный сдвиг (Δftarget) резонансной частоты, который определяют на этапе 38, отбор образцов завершают. Продолжительность отбора образцов представляет собой результат, получаемый на этапе 40, т.е. продолжительность времени с момента t0.
На этапе 42 вычисляют объем образца V (V=расход воздуха × продолжительность отбора образцов).
На этапе 44 вычисляют концентрацию частиц (C=масса/V), например, в единицах мкг/м3.
Этот подход обеспечивает определенное число циклов измерения для срока службы датчика, независимо от концентрации в воздухе. Таким образом, датчик массы может быть выполнен с возможностью непосредственного измерения концентрации твердых частиц в воздухе с прогнозируемым сроком службы, который требуется для потребительских применений.
Конкретная конструкция датчика будет зависеть от условий применения и должна выбираться в соответствии с предполагаемым пределом обнаружения, ожидаемым сроком службы, параметрами приводных и измерительных электронных устройств (например, диапазона рабочих частот).
Обычно, как представлено на фиг. 5, измерительная система содержит блок предварительной классификации частиц и отбирающее образцы устройство 50 (например, блок фильтрации и вентилятор или другое приспособление), МЭМС-резонатор 52 (описанный ниже), электронная схема 54 для приведения в действие и считывания информации датчиков и другие компоненты системы и контроллер 56 для обработки и хранения данных. Воздушный поток в измерительный блок может регулироваться, например, посредством использования вентиляторов и/или тепловой конвекции.
Блок 50 отбора и кондиционирования образцов спроектирован с учетом целевого диапазона размеров частиц. Конкретный целевой диапазон размеров твердых частиц (например, ТЧ1, ТЧ2,5, ТЧ10) может обеспечиваться с использованием соответствующих способов предварительной классификации размеров частиц; например, сочетание сетки/фильтра или инерционное/аэродинамическое разделение. Обеспечение достаточного объема образца воздуха непрерывно в течение всего срока службы представляет собой ключевое условие для проектирования такой системы. Для отбора частиц могут использоваться фильтры частиц, такие как волокнистые фильтры, сетки, инерционные или аэродинамические разделительные блоки.
Осаждение частиц может регулироваться электростатическим или электрофоретическим осаждением заряженных частиц на заземленном резонаторе или на противоположно смещенном резонаторе. Вместо этого может использоваться термофоретическое осаждение, которое включает создание разности температур между резонатором и противоположной поверхностью. В качестве альтернативы, осаждение может осуществляться на основании случайного движения частиц.
Также может использоваться вентилятор или насос для подачи объема отбираемого образца воздуха с конструированием системы, совместимой с этим ключевым условием.
Выбор зависит от минимальной обнаруживаемой массы, средней концентрации частиц в "чистом воздухе" (базовый уровень), соотношения частиц, проходящих через фильтры частиц в подсистеме отбора образцов и, наконец, требований пользователя в отношении минимальной измеряемой концентрации частиц.
МЭМС-резонатор может использоваться в качестве измеряющего массу элемента 52. Может быть спроектирован и изготовлен резонатор, имеющий подходящие размеры для достижения желательной резонансной частоты для обеспечения требуемого предела обнаружения.
Примеры возможных конструкций резонатора представляют собой кантилеверные конструкции (один конец - зажатый, другой конец - свободный), а также резонаторы с обоими зажатыми концами или резонаторы мембранного типа.
Кантилеверная конструкция может представлять собой особый интерес для обеспечения достаточной напряженности электрического поля на конце кантилевера в случае сбора электростатических частиц. Кантилеверная конструкция может иметь простую прямоугольную форму, треугольную форму (для большой площади зажима) или трапецеидальную форму для увеличения площади поверхности с одновременным сохранением небольшой площади зажатого конца.
Все эти параметры влияют на резонансное поведение системы и могут использоваться основные принципы конструкции резонаторов.
Схема 54 для генерации и считывания резонансной частоты также зависит от механической добротности (значения Q) резонатора, выбора преобразователя (например, пьезоэлектрического, термического, пьезорезистивного, оптического, емкостного и т.д.). В зависимости от требований к минимальной обнаруживаемой массы, может реализовываться механизм компенсации добротности для увеличения массового разрешения системы. Обнаружение резонансной частоты в электронном домене выбирается подходящим для способа возбуждения. В литературе известны основы схемотехники для таких резонаторов.
Например, в случае пьезоэлектрического возбуждения и измерения используется колебательный контур, который включает в себя электрический импеданс резонатора. В случае электростатического/емкостного возбуждения и измерения используется управляемый напряжением колебательный контур.
Контроллер 56 для обработки и передачи данных может также выбираться и проектироваться в зависимости от требований применения, таких как периодичность измерения отбираемых образцов, вычислительная нагрузка для расчетов и реализация алгоритмов обработки данных.
Датчик массы обеспечивает выходной сигнал, который показывает концентрацию частиц, имеющих размеры в определенном диапазоне. Данная информация может использоваться для регулирования устройства обработки воздуха. Например, высокая зарегистрированная масса, которая показывает высокие уровни загрязнения, может вызывать режим эксплуатации с высокой мощностью (например, посредством выбора установки высокой скорости вентилятора для устройства очистки воздуха), а низкая зарегистрированная масса может вызывать режим эксплуатации с низкой мощностью. Таким образом, обеспечивается энергосбережение, и может увеличиваться срок службы устройства очистки воздуха. В случае устройства обработки воздуха, которое регулирует свойства воздуха в помещении посредством поступления воздуха из окружающей среды, показания датчика массы могут использоваться для регулирования поступления воздуха из окружающей среды, например, в зависимости от того, превышает ли уровень загрязнения воздуха из окружающей среды требования системы.
Настоящее изобретение предлагает цикл измерения переменной продолжительности. Однако каждый цикл измерения может осуществляться в течение фиксированного периода. Например, измерение может осуществляться каждые X минут, где X зависит от скорости, с которой, как ожидается, будут изменяться уровни загрязнения в наблюдаемой окружающей среде, и от скорости, с которой должна отвечать регулируемая система (такая как очиститель воздуха). Например, уровни загрязнения могут регистрироваться каждые 1-30 минут, и отдельный цикл измерения может иметь максимальную продолжительность, которая обеспечивает достаточную степень разрешения для желательного интервала отбора образцов; например, 1-10 секунд для одноминутного интервала отбора образцов или 1-10 минут для тридцатиминутного интервала отбора образцов.
Интервал отбора образцов может также зависеть от присутствия "пользователей" в окружающей среде; например, она может дополнительно увеличиваться, когда устройство обработки воздуха не находится в режиме непрерывной эксплуатации вследствие отсутствия пользователей.
Контроллер затем задает операцию считывания датчика каждые X минут. Для данного значения X суммарный срок службы механического датчика будет практически постоянным.
Однако периодичность измерений датчика может устанавливаться пользователем, или, в качестве альтернативы, она может зависеть от конкретного применения датчика, например, зависеть от того, как быстро требуется осуществление изменений в ответ на изменения измеряемых датчиком показаний массы.
Показания датчика могут передаваться пользователю в качестве выходного сигнала, например, с использованием экрана дисплея. Пользователь может затем обрабатывать этот сигнал и реагировать на информацию соответствующим образом, а датчик массы может представлять собой автономное измерительное устройство. В качестве альтернативы, показания датчика могут функционировать в качестве внутренних параметров регулирования в рамках более крупной системы, которая автоматически реагирует в ответ на обнаруживаемые уровни загрязнения. Эта более крупная система может представлять собой очиститель воздуха или другую систему контроля качества воздуха.
Тот факт, что отдельные циклы измерения имеют различную продолжительность в зависимости от уровня загрязнения, не будет ощущаться пользователем. Переменная продолжительность просто означает, что для различных измерений датчика требуются различные периоды работы датчика. Преимущество заключается в том, что суммарный срок службы датчика может определяться точнее.
Данное изобретение описано выше со ссылкой на резонансный датчик массы, и это представляет особый интерес, поскольку он может реализовываться в качестве экономичных потребительских устройств. Однако проблема непрогнозируемого срока службы возникает для любого датчика массы, который полагается на анализ накапливающейся массы в течение цикла измерения. По мере того, как накапливающаяся масса увеличивается, относительное изменение массы в течение цикла измерения уменьшается, так что разрешение снижается с течением времени до тех пор, пока не достигается предельное значение. Аналогичным образом, конструкцией датчика может быть предусмотрена абсолютная предельная величина массы, которая может накапливаться.
Первый альтернативный подход представляет собой измерение теплоемкости накапливающейся массы. Это другой относительно простой способ, но его точность зависит от тепловых свойств аэрозолей, которые могут быть неизвестными.
Второй альтернативный подход представляет собой измерение ослабления излучения. Этот подход известен, например, в устройствах для измерения ослабления бета-излучения. Это измерение является точным, но для данного подхода требуется источник излучения, что может оказаться непрактичным для потребительского устройства. Таким образом, этот подход может оказываться более подходящим для профессиональных измерительных систем. Однако в литературе начали появляться описания рентгеновских генераторов для МЭМС-весов, которые представляют собой потенциал для использования в потребительских устройствах.
Третий альтернативный подход представляет собой использование оптического контроля накапливающейся массы.
Данное изобретение применимо к очистителям воздуха, автономным измеряющим частицы устройствам, персональным устройствам контроля воздействий, измеряющим частицы устройствам для кабин транспортных средств, датчикам частиц для наружного применения (как, например, автономные измерительные устройства или датчики на фонарных столбах для коммунальных служб), вентиляционным устройствам, разнообразным деталям системы кондиционирования помещений и, в общем, к датчикам массы разнообразных типов. Существуют также медицинские применения в системах искусственной вентиляции легких и введения лекарственных средств.
Вышеприведенные примеры основаны на измерении частиц ТЧ2,5, но данное изобретение может применяться к частицам ТЧ10, ТЧ1 или ультратонким частицам других категорий.
Вышеприведенный пример основан на МЭМС-резонаторе. Однако данный подход может быть основан на других микрорезонаторах, например, мембранном устройстве (аналогичном емкостному микромеханическому ультразвуковому преобразователю) или кварцевых кристаллических микровесах (QCM). Резонатор может представлять собой резонатор на объемных акустических волнах (BAW) или резонатор на поверхностных акустических волнах (SAW).
В системе осуществляется использование контроллера. Компоненты, которые могут применяться в качестве контроллера, включают, но не ограничиваются этим, традиционные микропроцессоры, интегральные схемы для специфических приложений (ASIC) и программируемые пользователем вентильные матрицы (FPGA).
В разнообразных реализациях процессор или контроллер может быть связан с одним или более носителями информации, такими как энергозависимое и энергонезависимое компьютерное запоминающее устройство, такое как оперативное запоминающее устройство (RAM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM) и электрически стираемое программируемое постоянное запоминающее устройство (EEPROM). На носителях информации могут быть закодированы одна или более программ, которые при исполнении на одном или более процессорах и/или контроллерах осуществляют требуемые функции. Разнообразные носители информации могут устанавливаться в составе процессора или контроллера, или они могут быть переносными, таким образом, что одна или более программ, хранящихся на них, могут загружаться в процессор или контроллер.
При практической реализации заявленного изобретения специалисты в данной области техники могут понять и реализовать другие варианты раскрытых вариантов осуществления из изучения чертежей, описания и прилагаемой формулы изобретения. В данной формуле изобретения слово "включающий" не исключает другие элементы или этапы, а форма единственного числа не исключает множества. Тот факт, что определенные меры перечислены во взаимно различных пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой. Никакие условные обозначения в формуле изобретения не должны истолковываться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК АЭРОЗОЛЯ И СПОСОБ ВОСПРИЯТИЯ | 2015 |
|
RU2672773C2 |
| СИСТЕМЫ И СПОСОБЫ ПОЛУЧЕНИЯ ОКСИДА АЗОТА | 2018 |
|
RU2717525C1 |
| Датчик уноса жидкого сорбента в аэрозольном виде из аппаратов гликолевой осушки природного газа | 2019 |
|
RU2733327C1 |
| СПОСОБ ДЕТЕКЦИИ МАКРОМОЛЕКУЛ БИОСЕНСОРНЫМ УСТРОЙСТВОМ | 1998 |
|
RU2148259C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УРОВНЯ РАЗДЕЛА ФАЗ В МНОГОФАЗНОЙ ТЕКУЧЕЙ КОМПОЗИЦИИ | 2015 |
|
RU2682611C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ АЭРОЗОЛЕЙ В ГАЗАХ | 1991 |
|
RU2082959C1 |
| СЕНСОР ПАРОВ УГЛЕВОДОРОДОВ | 2001 |
|
RU2202780C1 |
| СПОСОБЫ ЛЕЧЕНИЯ НАРУШЕНИЙ ЛЕГКИХ | 2018 |
|
RU2773750C2 |
| КОМБИНИРОВАННОЕ УСТРОЙСТВО ДЛЯ ГРАВИМЕТРИЧЕСКОГО И ХИМИЧЕСКОГО АНАЛИЗА АЭРОЗОЛЕЙ | 2019 |
|
RU2706420C1 |
| ГЕНЕРАТОР МИКРОПОТОКА ПАРОВ ВЕЩЕСТВ | 2005 |
|
RU2280501C1 |
Изобретение относится к измерению массы частиц в составе аэрозоля. Датчик массы для измерения массы частиц в составе аэрозоля содержит чувствительный элемент, детектор для детектирования массы частиц, осажденных на чувствительный элемент, и контроллер для управления детектором в течение цикла измерения для осуществления измерительной операции, причем частицы осаждаются на чувствительный элемент в течение цикла измерения, и при этом срок службы датчика зависит от суммарной массы, осажденной в течение множества последовательных циклов измерения, контроллер выполнен с возможностью задания продолжительности цикла измерения таким образом, что в течение цикла измерения обеспечивается предварительно заданное изменение массы, вызываемое осажденными частицами. Также описаны устройство для обработки воздуха и способ измерения массы частиц в составе аэрозоля с использованием этого датчика массы. Техническим результатом изобретения является точное прогнозирование срока службы датчика. 3 н. и 12 з.п. ф-лы, 5 ил.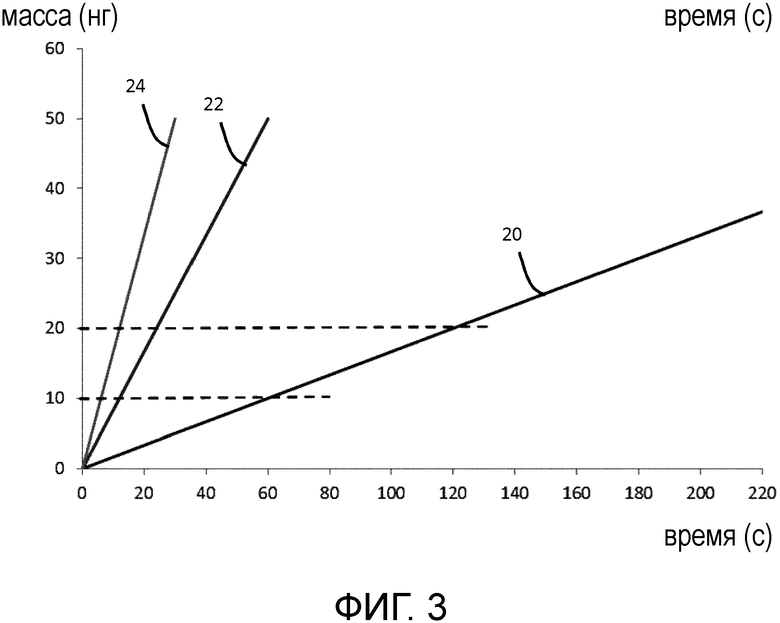
1. Датчик массы для измерения массы частиц в составе аэрозоля, содержащий:
чувствительный элемент (52);
детектор для детектирования массы частиц, осажденных на чувствительный элемент; и
контроллер (56) для управления детектором в течение цикла измерения для осуществления измерительной операции, причем частицы осаждаются на чувствительный элемент в течение цикла измерения, и при этом срок службы датчика зависит от суммарной массы, осажденной в течение множества последовательных циклов измерения,
причем контроллер (56) выполнен с возможностью задания продолжительности цикла измерения таким образом, что в течение цикла измерения обеспечивается предварительно заданное изменение массы, вызываемое осажденными частицами.
2. Датчик массы по п. 1, в котором контроллер выполнен с дополнительной возможностью:
определения из продолжительности цикла измерения объема отобранного образца аэрозоля и вычисления в результате этого концентрации частиц на единицу объема.
3. Датчик массы по п. 1 или 2, в котором детектор содержит преобразовательный элемент (54) для приведения чувствительного элемента в резонанс и детектирования резонансной частоты чувствительного элемента, зависящей от массы частиц, осажденных на чувствительный элемент.
4. Датчик массы по п. 3, в котором контроллер выполнен с дополнительной возможностью осуществлять:
измерение первоначальной резонансной частоты (f0);
вычисление сдвига (Δf) резонансной частоты, соответствующего предварительно заданному изменению массы; и
контроль резонансной частоты для задания продолжительности цикла измерения.
5. Датчик массы по п. 1, в котором чувствительный элемент (52) содержит МЭМС-датчик.
6. Датчик массы по п. 5, в котором чувствительный элемент (52) содержит резонатор в форме зажатой с обоих концов балки или резонатор в форме зажатой с одного конца балки.
7. Датчик массы по п. 1, дополнительно содержащий отбирающее образцы устройство (50) для работы в течение цикла измерения и перемещения контролируемого аэрозоля к чувствительному элементу.
8. Датчик массы по п. 1, дополнительно содержащий приспособление (50) фильтрации частиц для выбора диапазона размеров частиц, у которого должна измеряться масса частиц.
9. Устройство обработки воздуха, содержащее датчик массы по любому предшествующему пункту.
10. Способ измерения массы частиц в составе аэрозоля, включающий:
детектирование массы частиц, осажденных на чувствительный элемент в течение цикла измерения, и осуществление в результате этого измерительной операции; и
задание продолжительности цикла измерения таким образом, что в течение цикла измерения обеспечивается предварительно заданное изменение массы, вызываемое осажденными частицами, причем срок службы датчика зависит от суммарной массы, осажденной в течение множества последовательных циклов измерения.
11. Способ по п. 10, включающий:
вычисление объема отобранного образца аэрозоля из упомянутой заданной продолжительности цикла измерения; и
вычисление концентрации частиц на единицу объема.
12. Способ по п. 10 или 11, в котором детектирование включает:
приведение чувствительного элемента (52) в резонанс в течение цикла измерения;
детектирование резонансной частоты чувствительного элемента, причем данная резонансная частота зависит от массы частиц, осажденных на чувствительный элемент.
13. Способ по п. 12, включающий:
измерение первоначальной резонансной частоты (f0) в начале цикла измерения;
получение сдвига (Δf) резонансной частоты, соответствующего заданному изменению массы; и
контроль резонансной частоты до тех пор, пока не произойдет сдвиг резонансной частоты, для задания продолжительности цикла измерения.
14. Способ по п. 10, дополнительно включающий регулирование отбирающего образцы устройства (50) в течение цикла измерения для перемещения контролируемого аэрозоля к чувствительному элементу.
15. Способ по п. 10, дополнительно включающий осуществление фильтрации частиц для выбора диапазона размеров частиц, у которого должна измеряться масса частиц.
| US 20030123059 A1, 03.07.2003 | |||
| ДАТЧИК КОНТРОЛЯ ИНТЕНСИВНОСТИ НАКОПЛЕНИЯ ПЫЛИ | 2007 |
|
RU2358256C1 |
| US 2005172735 A1, 11.08.2005 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ ПО РАЗМЕРАМ ЧАСТИЦ АЭРОЗОЛЕЙ | 0 |
|
SU268005A1 |

