Изобретение относится к вычислительной технике и может быть использовано для определения и коррекции дисторсии оптических подсистем видеокамер и систем технического зрения, использующих в качестве приемников изображения матричные приемники изображения.
Известен способ и устройство для коррекции дисторсии на цифровых изображениях с использованием характерных для дисторсии черт (патент США №6937282, опубликованный 30.08.2005 г.), заключающийся в коррекции искажений, вносимых дисторсией линзы на сформированное этой линзой изображение. В результате проведенной коррекции для точек изображения восстанавливаются их истинные позиции.
Недостатком данного способа является коррекция только радиальной дисторсии без учета ее тангенциальной (децентрированной) составляющей.
Наиболее близким к предлагаемому является способ программной коррекции дисторсии изображений в цифровых камерах (патент США №6538691, опубликованный 25.03.2003 г.), заключающийся в коррекции дисторсии на цифровом изображении. Способ включает в себя калибровку камеры путем выбора тестового образца и ручной регулировки коэффициента дисторсии, определяющего степень искажения, вносимого дисторсией, камеры до тех пор, пока изображение не станет неискаженным. После получения коэффициента дисторсии производят коррекцию изображений, полученных исследуемой камерой.
Недостатком этого способа является проведение коррекции без учета тангенциальной (децентрированной) составляющей дисторсии и необходимость ручного подбора коэффициента дисторсии.
Технической задачей изобретения является повышение точности калибровки дисторсии за счет определения коэффициентов как радиальной, так и тангенциальной составляющих дисторсии, а также проведение калибровки в автоматическом режиме.
Задача решается тем, что в известный способ программной коррекции дисторсии изображений в цифровых камерах, включающий калибровку оптико-электронного устройства и коррекцию дисторсии, введены ориентирование оптико-электронного устройства в заданных позициях, получение изображений, определение коэффициентов радиальной и тангенциальной дисторсии на основе анализа полученных изображений, расчет истинных координат точек искаженного изображения на основе реальных координат этих точек и полученных коэффициентов дисторсии.
Изобретение может быть использовано для калибровки дисторсии систем технического зрения широко применяемых для контроля различных автоматизированных процессов промышленности, автоматизированного слежения за дорожным движением, а также для калибровки радиальной дисторсии при производстве фото- и видеокамер с матричными приемниками изображения и соответствует критерию «промышленная применимость».
Сущность изобретения поясняется чертежом, где дана схема, поясняющая процесс определения коэффициентов дисторсии.
Дисторсия проявляется в том, что при прохождении через оптическую систему точки с идеальными координатами  преобразуются в точки p:(хi,yi) с искаженными координатами, в результате точки не отображаются в их истинные позиции. Радиальная дисторсия обусловлена сферической поверхностью линз объектива, а тангенциальная дисторсия - неперпендикулярностью главной оптической оси и плоскости изображения и прохождением главной оптической оси не через центр кадра.
преобразуются в точки p:(хi,yi) с искаженными координатами, в результате точки не отображаются в их истинные позиции. Радиальная дисторсия обусловлена сферической поверхностью линз объектива, а тангенциальная дисторсия - неперпендикулярностью главной оптической оси и плоскости изображения и прохождением главной оптической оси не через центр кадра.
Истинные (идеальные) координаты точки могут быть выражены из реальных (искаженных) координат и величин смещения точек вдоль осей абсцисс и ординат соответственно [The calibration problem for stereoscopic vision, NATO ASI Series, vol.F52. Sensor devices and systems for robotics, Springer-Verlag. Berlin, Heidelberg, 1989, p.195-213]

где (х, y) - реальные координаты точки,  - истинные координаты точки, δx, δу - величины смещения точек вдоль осей абсцисс и ординат соответственно.
- истинные координаты точки, δx, δу - величины смещения точек вдоль осей абсцисс и ординат соответственно.
Величины смещения выражаются следующим образом:


где k1x(x2+y2) и k1y(x2+y2) - величина радиальной дисторсии, р1(3х2+y2)+2p2xy и р2(3х2+y2)+2p1xy - величина тангенциальной дисторсии, k1, р1, р2 - коэффициенты дисторсии.
Для определения коэффициентов дисторсии выполняют следующие действия:
1) устанавливают оптико-электронное устройство таким образом, чтобы иметь возможность перемещать ее вдоль оси абсцисс на фиксированную величину;
2) получают изображение, после чего выбирают на нем произвольную точку, которую впоследствии считают контрольной (точка «1», чертеж);
3) перемещают оптико-электронное устройство вдоль оси абсцисс на заранее заданную величину и производят получение изображения, при этом контрольная точка на неискаженном дисторсией изображении должна занимать положение «2» (чертеж), но ввиду наличия дисторсии она смещена.
4) перемещают оптико-электронное устройство вдоль оси абсцисс, не меняя направления на величину, равную величине первого смещения. После выполнения действий, аналогичных пункту «3», определяют реальные координаты контрольной точки (положение «3», чертеж) на третьем изображении.
На основании полученных координат точек и формул (1-3) составляют систему уравнений. Пусть (х0, у0) - истинные координаты начальной точки, тогда




где 

 - истинные координаты 1-й, 2-й и 3-й контрольных точек соответственно, m - заранее заданный интервал между точками. На основе выражений (1)÷(6) составляют систему уравнений, которая имеет вид
- истинные координаты 1-й, 2-й и 3-й контрольных точек соответственно, m - заранее заданный интервал между точками. На основе выражений (1)÷(6) составляют систему уравнений, которая имеет вид
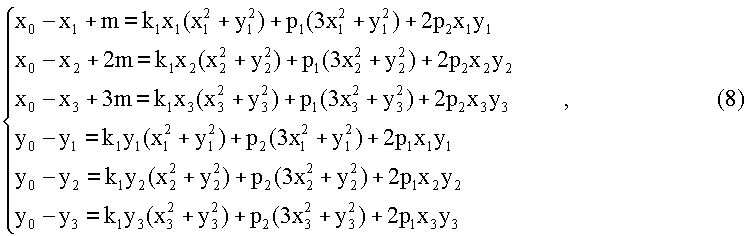
где (x1; y1), (x2; y2), (x3; y3) - реальные координаты рассматриваемых точек.
Пусть





Тогда, после решения системы методом подстановок, получают:



Коррекция дисторсии производится автоматическим смещением точек изображения в их истинные позиции, рассчитанные на основе формул (1)÷(3) при уже известных коэффициентах k1, p1, р2 и определенных по изображению искаженных координатах точек.
Таким образом, изобретение позволяет повысить точность калибровки дисторсии благодаря использованию в расчетах не только радиальной, но и тангенциальной составляющей дисторсии и обеспечить автоматический режим проведения калибровки за счет исключения ручной операции подбора коэффициентов дисторсии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ РАДИАЛЬНОЙ ДИСТОРСИИ ОПТИЧЕСКОЙ ПОДСИСТЕМЫ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2007 |
|
RU2346326C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ РАДИАЛЬНОЙ ДИСТОРСИИ НА ЦИФРОВОМ ИЗОБРАЖЕНИИ | 2006 |
|
RU2351091C2 |
| Способ высокоточной калибровки дисторсии цифровых видеоканалов | 2018 |
|
RU2682588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ИХ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ | 2018 |
|
RU2697822C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПАНОРАМНЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2365998C2 |
| СПОСОБ ПОЛЕТНОЙ КАЛИБРОВКИ МУЛЬТИСПЕКТРАЛЬНОЙ АППАРАТУРЫ КОСМИЧЕСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2561231C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2381474C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| СПОСОБ КОМПЕНСАЦИИ ДИСТОРСИИ ОБЪЕКТИВА | 2022 |
|
RU2790055C1 |
Изобретение относится к вычислительной технике и может быть использовано для определения и коррекции дисторсии оптических подсистем видеокамер и систем технического зрения, использующих матричные приемники изображения. Техническим результатом является повышение точности калибровки дисторсии за счет определения коэффициентов радиальной и тангенциальной составляющих дисторсии, проведения калибровки в автоматическом режиме. Способ заключается в следующем: устанавливают оптико-электронное устройство с возможностью перемещения вдоль оси на фиксированную величину и получения в каждом из зафиксированных положений изображения, измеряют в каждом из зафиксированных положений оптико-электронного устройства реальные координаты одной и той же контрольной точки получаемого изображения, по полученным координатам вычисляют коэффициенты радиальной и тангенциальной дисторсии, вычисляют истинные координаты точек искаженного изображения на основе реальных координат этих точек и полученных коэффициентов дисторсии и корректируют дисторсию путем смещения точек в их истинные позиции. 1 ил.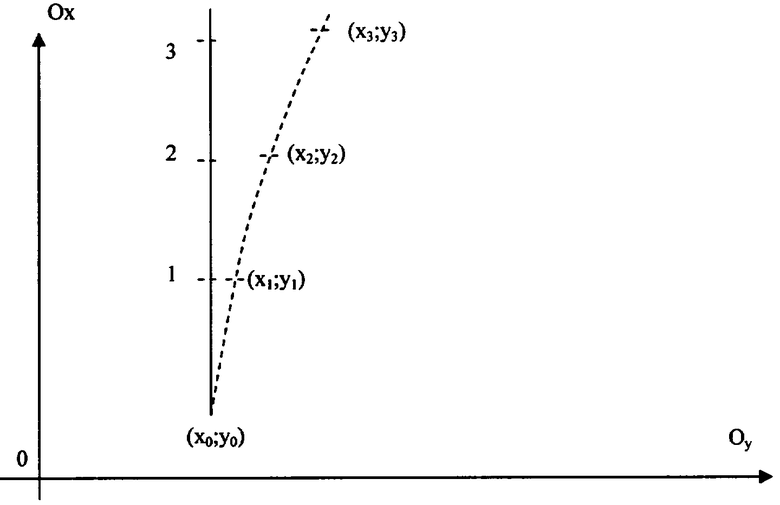
Способ калибровки дисторсии оптико-электронного устройства, включающий определение коэффициента дисторсии и коррекцию дисторсии, отличающийся тем, что устанавливают оптико-электронное устройство с возможностью перемещения вдоль оси на фиксированную величину и получения в каждом из зафиксированных положений изображения, измеряют в каждом из зафиксированных положений оптико-электронного устройства реальные координаты одной и той же контрольной точки получаемого изображения, по полученным координатам вычисляют коэффициенты радиальной и тангенциальной дисторсии, вычисляют истинные координаты точек искаженного изображения на основе реальных координат этих точек и полученных коэффициентов дисторсии и корректируют дисторсию путем смещения точек в их истинные позиции.
| US 6538691 А, 25.03.2003 | |||
| RU 2004104494 А, 10.08.2005 | |||
| Способ измерения дисторсии оптических систем | 1984 |
|
SU1275248A1 |
| US 6937282 А, 30.08.2005 | |||
| DE 3201804 A1, 08.09.1983. | |||

