Предлагаемое изобретение относится к области радиолокации, в частности, к устройствам контроля работоспособности радиолокационных систем.
Известен «Имитатор радиолокационной системы управления бортового радиоэлектронного оборудования» (RU 72768 U1 опубл.27.04.2008 г., МПК G01S 7/40), содержащий имитатор шумового сигнала, имитатор ответного сигнала, устройство аттенюаторов, имитатор зондирующего сигнала, имитатор уводящего сигнала, имитатор прицельного сигнала, имитатор многократного сигнала, коммутирующее устройство, устройство сопряжения, устройство регистрации, вычислитель сигналов управления РЛСУ, имитатор сигналов системы индикации, вычислитель сигналов исполнительных объектов, вычислитель навигационных сигналов, блок контроля и коммутации, блок управления, устройство обработки внешних сигналов, перепрограммируемый сигнальный процессор, генератор опорных частот, формирователь синхросигналов и устройство обработки сигналов радиолокатора. Блок управления шиной соединен с первым входом блока контроля и коммутации, первый выход которого соединен с входом вычислителя сигналов управления РЛСУ, второй выход блока контроля и коммутации подключен ко входу имитатора сигналов системы индикации, третий выход блока контроля и коммутации подключен ко входу вычислителя сигналов исполнительных объектов, четвертый выход блока контроля и коммутации соединен со входом вычислителя навигационных сигналов, пятый выход блока контроля и коммутации шиной соединен со входом коммутирующего устройства, первый выход которого соединен со входом имитатора многократного сигнала. Выход имитатора многократного сигнала подключен к первому входу устройства аттенюаторов, второй выход коммутирующего устройства соединен со входом имитатора ответного сигнала, выход имитатора ответного сигнала подключен во второму входу устройства аттенюаторов, третий выход коммутирующего устройства соединен со входом имитатора прицельного сигнала, выход имитатора прицельного сигнала соединен с третьим входом устройства аттенюаторов, четвертый выход коммутирующего устройства соединен со входом имитатора уводящего сигнала, выход имитатора уводящего сигнала подключен к четвертому входу устройства аттенюаторов, пятый выход коммутирующего устройства подключен ко входу имитатора шумового сигнала, выход имитатора шумового сигнала соединен с пятым входом устройства аттенюаторов, шестой выход коммутирующего устройства соединен со входом имитатора зондирующего сигнала. Выход имитатора зондирующего сигнала подключен к шестому входу устройства аттенюаторов, выход устройства сопряжения соединен с входом устройства регистрации, а выход устройства регистрации подключен ко второму входу блока контроля и коммутации. Первый выход устройства обработки внешних сигналов соединен с входом устройства сопряжения, второй выход устройства обработки внешних сигналов соединен со вторым входом устройства обработки сигналов радиолокатора. Третий выход устройства обработки внешних сигналов подключен ко второму входу перепрограммируемого сигнального процессора, второй выход вычислителя сигналов управления РЛСУ соединен с первым входом устройства обработки внешних сигналов, первый выход вычислителя сигналов управления РЛСУ подключен к первому входу устройства обработки сигналов радиолокатора. Выход имитатора сигналов системы индикации соединен с вторым входом устройства обработки внешних сигналов, выход вычислителя сигналов исполнительных объектов соединен с третьим входом устройства обработки внешних сигналов, выход вычислителя навигационных сигналов подключен к четвертому входу устройства обработки внешних сигналов, первый выход генератора опорной частоты соединен с первым входом формирователя синхроимпульсов, ко второму входу которого подключен выход устройства обработки сигналов радиолокатора, к третьему входу устройства обработки сигналов радиолокатора подключен выход формирователя синхросигналов, второй выход генератора опорной частоты соединен с первым входом перепрограммируемого сигнального процессора, к третьему входу которого подключено устройство аттенюаторов, выход перепрограммируемого сигнального процессора соединен со вторым входом устройства регистрации. Наиболее близким по технической сущности к предлагаемому является «Устройство наземного контроля радиолокационных систем управления» (RU 2174238 С1 опубл.27.09.2001 г. МПК G01S 7/40), содержащее имитатор шумового сигнала, имитатор ответного сигнала, антенну, устройство аттенюаторов, имитатор зондирующего сигнала, имитатор уводящего сигнала, а также имитатор прицельного сигнала и имитатор многократного сигнала. Кроме того оно содержит коммутирующее устройство, радиолокационная система управления (РЛСУ), устройство сопряжения, устройство регистрации, вычислитель сигналов управления РЛСУ, имитатор сигналов системы индикации, вычислитель сигналов исполнительных объектов, вычислитель навигационных сигналов, блок контроля и коммутации и блок управления. Блок управления шиной соединен с первым входом блока контроля и коммутации, первый выход которого соединен со входом вычислителя сигналов управления РЛСУ, а выход вычислителя сигналов управления РЛСУ соединен с первым входом РЛСУ, второй выход блока контроля и коммутации подключен ко входу имитатора сигналов системы индикации, выход которого соединен со вторым входом РЛСУ, третий выход блока контроля и коммутации подключен ко входу вычислителя сигналов исполнительных объектов, выход которого соединен с третьим входом РЛСУ, четвертый выход блока контроля и коммутации соединен со входом вычислителя навигационных сигналов, выход которого подключен к четвертому РЛСУ, пятый выход блока контроля и коммутации шиной соединен со входом коммутирующего устройства, первый выход которого соединен со входом имитатора многократного сигнала, выход имитатора многократного сигнала подключен к первому входу устройства аттенюаторов, второй выход коммутирующего устройства соединен с входом имитатора ответного сигнала, выход имитатора ответного сигнала подключен ко второму входу устройства аттенюаторов, третий выход коммутирующего устройства соединен с входом имитатора прицельного сигнала. Выход имитатора прицельного сигнала соединен с третьим входом устройства аттенюаторов, четвертый выход коммутирующего устройства соединен с входом имитатора уводящего сигнала, выход имитатора уводящего сигнала подключен к четвертому входу устройства аттенюаторов, пятый выход коммутирующего устройства подключен ко входу имитатора шумового сигнала, выход имитатора шумового сигнала соединен с пятым входом устройства аттенюаторов, шестой выход коммутирующего устройства соединен со входом имитатора зондирующего сигнала, выход имитатора зондирующего сигнала подключен к шестому входу устройства аттенюаторов, выход устройства аттенюаторов соединен с антенной, кроме того, выход РЛСУ соединен со входом устройства сопряжения, выход устройства сопряжения соединен со входом устройства регистрации, а выход устройства регистрации подключен ко второму входу блока контроля и коммутации.
Недостатком известных технических решений является невозможность осуществить проверку состояния радиолокационной системы управления в режиме реального времени.
Задачей предлагаемого изобретения является обеспечение наземных проверок технического состояния радиолокационной системы управления при проведении настроечно-регулировочных и регламентных работ в режиме реального времени.
Технический результат заключается в обеспечении синхронной работы предлагаемого устройства наземного контроля радиолокационной системы управления в режиме реального времени.
Сущность заявляемого технического решения заключается в том, что устройство наземного контроля радиолокационной системы управления содержит имитатор шумового сигнала и имитатор ответного сигнала антенну, устройство аттенюаторов, имитатор зондирующего сигнала, имитатор уводящего сигнала, имитатор прицельного сигнала, имитатор многократного сигнала, коммутирующее устройство, радиолокационная система управления (РЛСУ), устройство сопряжения, устройство регистрации, вычислитель сигналов управления РЛСУ, имитатор сигналов системы индикации, вычислитель сигналов исполнительных объектов, вычислитель навигационных сигналов, блок контроля и коммутации и блок управления. Блок управления шиной соединен с первым входом блока контроля и коммутации, первый выход которого соединен со входом вычислителя сигналов управления РЛСУ, а выход вычислителя сигналов управления РЛСУ соединен с первым входом РЛСУ, второй выход блока контроля и коммутации подключен ко входу имитатора сигналов системы индикации, выход которого соединен со вторым входом РЛСУ, третий выход блока контроля и коммутации подключен ко входу вычислителя сигналов исполнительных объектов, выход которого соединен с третьим входом РЛСУ, четвертый выход блока контроля и коммутации соединен со входом вычислителя навигационных сигналов, выход которого подключен к четвертому входу РЛСУ, пятый выход блока контроля и коммутации соединен шиной со входом коммутирующего устройства, первый выход которого соединен со входом имитатора многократного сигнала, выход имитатора многократного сигнала подключен к первому входу устройства аттенюаторов, второй выход коммутирующего устройства соединен с входом имитатора ответного сигнала. Выход имитатора ответного сигнала подключен ко второму входу устройства аттенюаторов, третий выход коммутирующего устройства соединен со входом имитатора прицельного сигнала, выход имитатора прицельного сигнала соединен с третьим входом устройства аттенюаторов, четвертый выход коммутирующего устройства соединен со входом имитатора уводящего сигнала, выход имитатора уводящего сигнала подключен к четвертому входу устройства аттенюаторов, пятый выход коммутирующего устройства подключен ко входу имитатора шумового сигнала, выход имитатора шумового сигнала соединен с пятым входом устройства аттенюаторов, шестой выход коммутирующего устройства соединен со входом имитатора зондирующего сигнала, выход имитатора зондирующего сигнала подключен к шестому входу устройства аттенюаторов, выход устройства аттенюаторов соединен с антенной, кроме того выход РЛСУ соединен со входом устройства сопряжения, выход устройства сопряжения соединен со входом устройства регистрации, а выход устройства регистрации подключен ко второму входу блока контроля и коммутации.
Новыми признаками, обеспечивающими достижение заявляемого технического результата, является введение запоминающего устройства, преобразователя характеристик временной диаграммы и устройства задержки импульсов. Причем, шестой выход блока контроля и коммутации соединен с входом запоминающего устройства, выход которого подключен к входу преобразователя характеристик временной диаграммы, выход преобразователя характеристик временной диаграммы соединен со вторым входом устройства задержки импульсов, первый вход которого подключен ко второму выходу РЛСУ. Первый выход устройства задержки импульсов подключен ко второму входу вычислителя сигналов управления РЛСУ, второй выход устройства задержки импульсов соединен со вторым входом имитатора сигналов системы индикации, третий выход устройства задержки импульсов подключен ко второму входу вычислителя сигналов исполнительных элементов, четвертый выход устройства задержки импульсов соединен со вторым входом вычислителя навигационных сигналов.
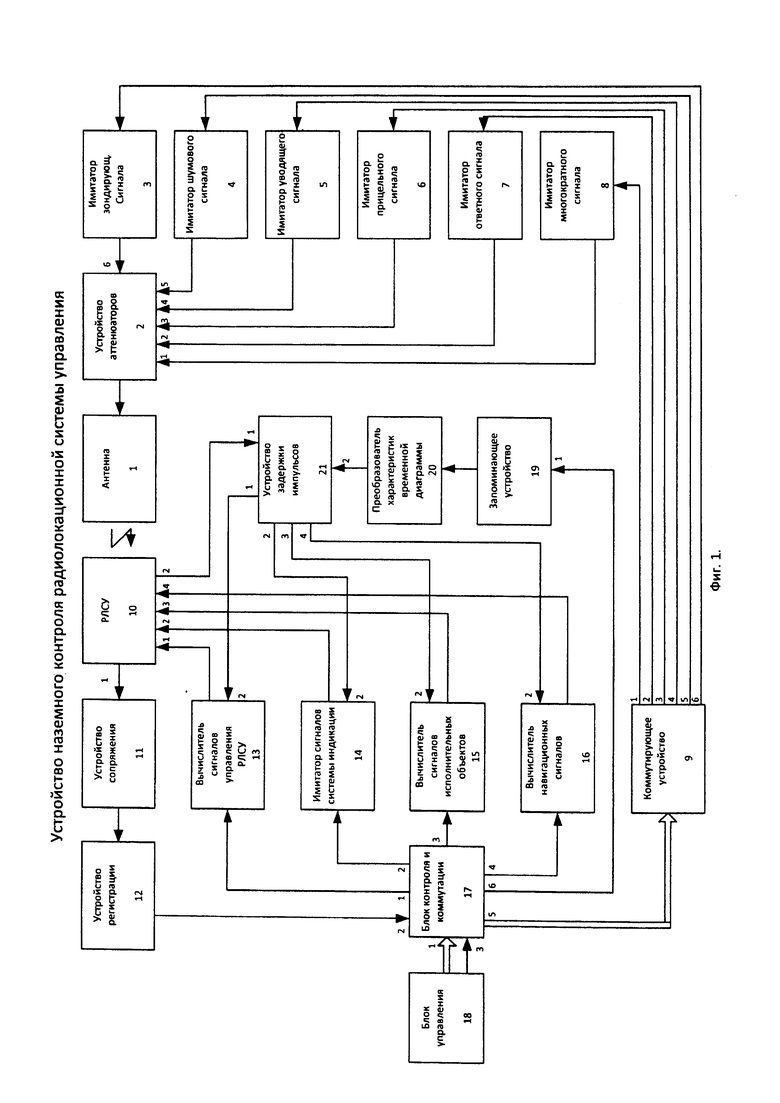
На фиг. 1 изображена блок-схема устройства наземного контроля радиолокационной системы управления.
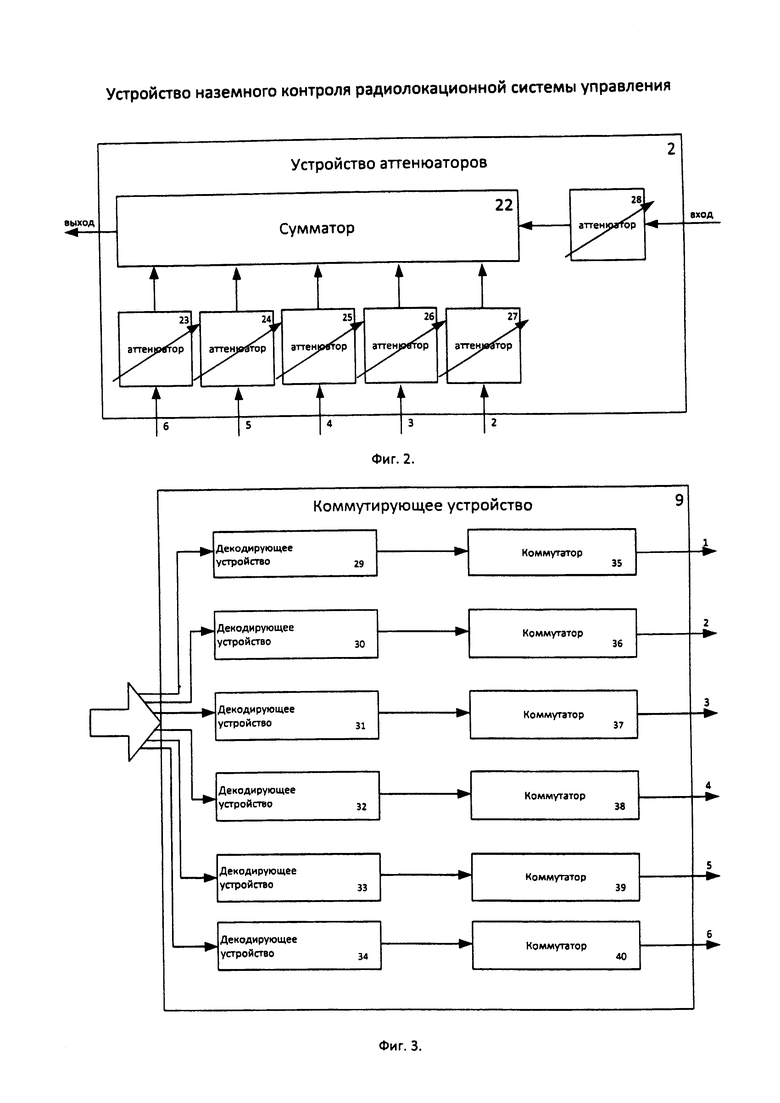
На фиг. 2 изображена блок-схема устройства аттенюаторов.
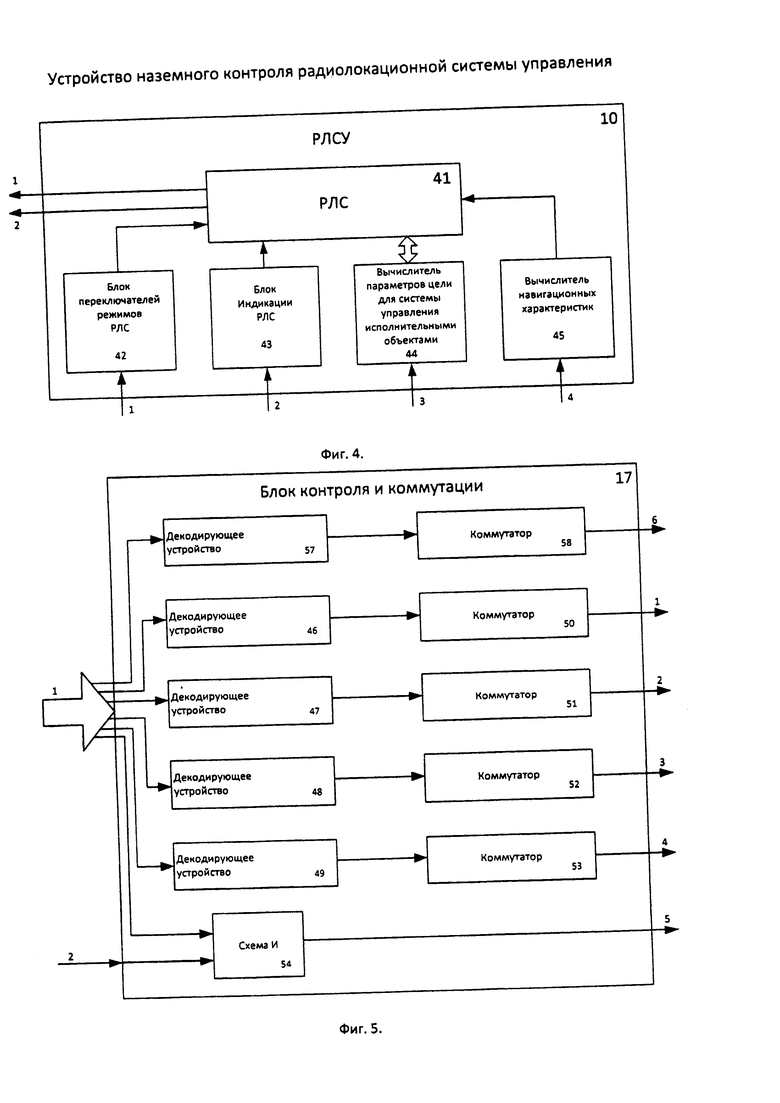
На фиг. 3 изображена блок-схема коммутирующего устройства.
На фиг. 4 изображена блок-схема РЛСУ.
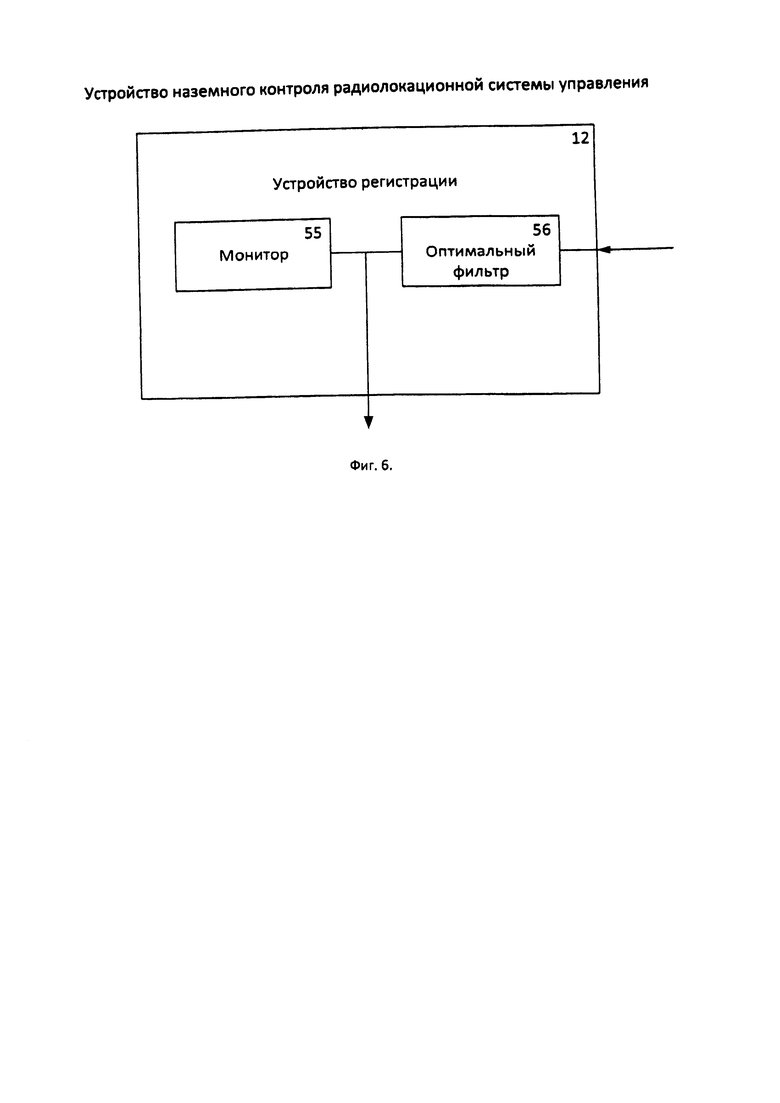
На фиг. 6 изображена блок-схема устройства регистрации.
Устройство наземного контроля радиолокационной системы управления состоит из антенны 1, устройства аттенюаторов 2, выполненного, например, по схеме, приведенной на фиг. 2, имитатора зондирующего сигнала 3, выполненного, например, в виде генератора импульсов в доплеровском диапазоне частот, а также имитатора шумового сигнала 4, выполненного, например, в виде генератора шумового сигнала в доплеровском диапазоне частот, имитатора уводящего сигнала 5, выполненного, например, в виде перестраиваемого генератора, имитатора прицельного сигнала 6, выполненного в виде, например, генератора, формирующего импульсный сигнал доплеровской частотой равной доплеровской частоте цели. Кроме того, устройство наземного контроля радиолокационной системы управления состоит из имитатора ответного сигнала 7, выполненного, например, в виде генератора и линии задержки с регулируемым временем задержки сигнала, имитатора многократного сигнала 8, выполненного, например, в виде генератора серий импульсов, коммутирующего устройства 9, выполненного, например, по схеме, приведенной на фиг 3, радиолокационной системы управления 10 (РЛСУ), выполненной, например, по схеме, приведенной на фиг. 4, устройства сопряжения 11 устройства регистрации 12, выполненного, например, по схеме, приведенной на фиг. 6. Устройство наземного контроля радиолокационной системы управления состоит также из вычислителя сигналов управления радиолокационной системой управления 13, выполненного в виде ЭВМ, имитатора сигналов системы индикации 14, выполненного в виде генераторов сигналов отметок дальности, скорости, угла места, азимута, траектории цели, вычислителя сигналов исполнительных элементов 15 выполненной, например, в виде ЭВМ, вычислителя навигационных сигналов 16, выполненного в виде ЭВМ, устройства контроля и коммутации 17, пример схемы выполнения, которого, приведен на фиг. 5 и блока управления 18, выполненного, например, в виде персонального компьютера с монитором. Кроме того, устройство наземного контроля радиолокационной системы управления содержит запоминающее устройство 19, преобразователь характеристик временной диаграммы 20 и устройство задержки импульсов 21.
Устройство аттенюаторов 2 состоит из сумматора 22 и перестраиваемых аттенюаторов 23,24,25,26,27,28 с ручной регулировкой.
Коммутирующее устройство 9 состоит из декодирующих устройств 29,30,31,32,33,34 и коммутаторов 35,36,37,38,39,40.
Радиолокационная система управления 10 содержит радиолокационную станцию (РЛС) 41, блок переключателей режимов радиолокационной станции (РЛС) 42, блок индикации РЛС 43, вычислитель параметров цели для системы управления исполнительными объектами 44, вычислитель навигационных характеристик 45.
Блок контроля и коммутации 17 содержит декодирующие устройства 46,47,48,49,57 коммутаторы 50,51,52,53,58 и схему И 54.
Устройство регистрации 12 содержит монитор 55 и оптимальный фильтр 56.
Выход блока управления 18 соединен шиной с входом блока контроля и коммутации 17, первый выход блока контроля и коммутации 17 соединен со входом вычислителя сигналов управления РЛСУ 13, выход которого подключен к первому входу РЛСУ 10, второй выход блока контроля и коммутации 17 соединен со входом имитатора сигналов системы индикации 14, выход имитатора системы индикации 14 подключен ко второму входу РЛСУ 10, третий выход блока контроля и коммутации 17 соединен с входом вычислителя сигналов исполнительных объектов 15, выход вычислителя сигналов исполнительных объектов 15 подключен к третьему входу РЛСУ 10, четвертый выход блока контроля и коммутации 17 соединен со входом вычислителя навигационных сигналов 16, выход вычислителя навигационных сигналов подключен к четвертому входу РЛСУ 10, пятый выход блока контроля и коммутации 17 соединен шиной с входом коммутирующего устройства 9. Первый выход коммутирующего устройства 9 соединен с входом имитатора многократного сигнала 8, выход имитатора многократного сигнала 8 подключен к первому входу устройства аттенюаторов 2, второй выход коммутирующего устройства 9 соединен со входом имитатора ответного сигнала 7, выход имитатора ответного сигнала 7 подключен ко второму входу устройства аттенюаторов 2, третий выход коммутирующего устройства 9 соединен со входом имитатора прицельного сигнала 6, выход имитатора прицельного сигнала 6 подключен к третьему входу устройства аттенюаторов 2, четвертый выход коммутирующего устройства 9 соединен с входом имитатора уводящего сигнала 5, выход имитатора уводящего сигнала 5 подключен к четвертому входу устройства аттенюаторов 2, пятый выход коммутирующего устройства 9 соединен со входом имитатора шумового сигнала 4, выход имитатора шумового сигнала 4 подключен к пятому входу устройства аттенюаторов. Шестой выход коммутирующего устройства 9 соединен с имитатором зондирующего сигнала 3, выход имитатора зондирующего сигнала 3 подключен к шестому входу устройства аттенюаторов 2, выход устройства аттенюаторов 2 подключен к антенне. Выход радиолокационной системы управления (РЛСУ) подключен ко входу устройства сопряжения 11, выход устройства сопряжения 11 подключен ко входу устройства регистрации 12. Выход устройства регистрации 12 соединен со вторым входом блока контроля и коммутации. Шестой выход блока контроля и коммутации 17 соединен со входом запоминающего устройства 19, выход которого подключен ко входу преобразователя характеристик временной диаграммы 20, выход преобразователя характеристик временной диаграммы 20 соединен со вторым входом устройства задержки импульсов 21, первый вход которого подключен ко второму выходу РЛСУ 10, первый выход устройства задержки импульсов 21 подключен ко второму входу вычислителя сигналов управления РЛСУ 13, второй выход устройства задержки импульсов соединен со вторым входом имитатора сигналов системы индикации 14, третий выход устройства задержки импульсов 21 подключен ко второму входу вычислителя сигналов исполнительных элементов 15, четвертый выход устройства задержки импульсов 21 соединен со вторым входом вычислителя навигационных сигналов 16.
Устройство наземного контроля радиолокационных систем работает в двух основных режимах: в режиме проверки работоспособности и в режиме контроля радиолокационной системы управления. В режиме проверки работоспособности вычислителя сигналов управления РЛСУ 13, имитатора сигналов системы индикации 14, вычислителя сигналов исполнительных объектов 15 и вычислителя навигационных сигналов 16 на них подаются через устройство контроля и коммутации 17, последовательно сформированные по команде оператора в блоке управления 18 тестовые сигналы. С выходов этих блоков сигналы подаются соответственно на вход 1 блока переключения режимов РЛС 39, вход 2 блока индикации РЛС 40, вход 3 вычислителя параметров цели для системы управления исполнительными элементами 41 и вход 4 вычислителя навигационных характеристик 42. В случае неисправности одного из блоков сигнал о неисправности не проходит через оптимальный фильтр устройства регистрации 12, так как не соответствует форме тестового сигнала, например, шахматного вида, не отражается на мониторе устройства регистрации 12 и не поступает на схему И 51 блока контроля и коммутации 17, и не поступает на коммутирующее устройство 9 на подключение имитатора зондирующего сигнала 3, имитатора шумового сигнала 4, имитатора уводящего сигнала 5, имитатора прицельного сигнала 6, имитатора ответного сигнала 7, имитатора многократного сигнала 8. Оператор по получению информации о неисправности проверяемого блока принимает меры по восстановлению его работоспособности. В случае исправности вычислителя сигналов управления РЛСУ 13, имитатора сигналов системы индикации 14, вычислителя сигналов исполнительных элементов 15, и вычислителя навигационных сигналов 16 с выхода РЛСУ система переходит в режим контроля радиолокационной системы управления.
По команде оператора с блока управления 18 через блок контроля и коммутации 17 и коммутирующее устройство 9 выдаются последовательно команды на формирование в имитаторе зондирующего сигнала 3, имитаторе шумового сигнала 4, имитаторе уводящего сигнала 5, имитаторе прицельного сигнала 6, имитаторе многократного сигнала 7 и имитаторе ответного сигнала 8, уровень которых регулируется устройством аттенюаторов 2. На сумматоре 22 устройства аттенюаторов 2 происходит их смешивание, например, зондирующий сигнал смешивается с шумовым сигналом, зондирующий сигнал с уводящим сигналом и т.д. Сформированные сигналы поочередно, через антенну 1 излучаются и принимаются антенной РЛСУ 10. На блок переключателей режимов 42 РЛСУ 10 приходят с вычислителя сигналов управления РЛСУ 13 сигналы, характеризующие режимы работы РЛС, в частности Обзор, Захват сигнала цели, Сопровождение и т д., которые в свою очередь поступают на пульт управления РЛС 41. На блок индикации РЛС 43 РЛСУ 10 с имитатора сигналов системы индикации подаются сигналы, характеризующие различные виды отметок, высвечивающихся на блоке индикации РЛС 43 РЛСУ 10, которые далее подаются на индикатор РЛС 41. С вычислителя сигналов исполнительных объектов 15 сигналы целеуказания исполнительных объектов, подаются на вычислитель параметров цели для системы управления исполнительными объектами 44, которые далее поступают на ЭВМ РЛС 41. С вычислителя навигационных сигналов 16 на вычислитель навигационных характеристик 45 подаются сигналы, характеризующие дальность, скорость, угол места, азимут цели, которые далее поступают на навигационное устройство РЛС 41. В результате на устройство регистрации 12 поступают сигналы, с приемного устройства РЛС 41, характеризующие основные характеристики, контролируемой радиолокационной системы, такие как энергетический потенциал, усиление антенны, среднюю и импульсную мощности излучения, коэффициент шума, форму пеленгационной характеристики, точность сопровождения, количество и степень готовности исполнительных объектов и т.д.
Запоминающее устройство 19 обеспечивает прием и хранение дальности до цели, скорости цели, режима работы РЛСУ 10, типа поставляемой помехи.
Преобразователь характеристик временной диаграммы 20 производит пересчет дальности во временную задержку в зависимости от периода зондирующего сигнала и может быть выполнен, например, на программируемых логических интегральных схемах (ПЛИС), содержащих преобразователь кода дальности, формирующий строб текущей дальности, длительность которого соответствует имитируемому времени запаздывания зондирующего сигнала, счетчики, регистры и комбинационные логические элементы, формирующие код задержки. Устройство задержки импульсов 21 обеспечивает формирование отраженных сигналов, задержка которых относительно сигнала РЛСУ пропорционально дальности до цели с учетом скорости цели и типа поставляемой помехи.
Таким образом, предлагаемое устройство наземного контроля радиолокационных систем управления позволяет контролировать характеристики радиолокационных систем управления без проведения натурных испытаний в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО НАЗЕМНОГО КОНТРОЛЯ РАДИОЛОКАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ | 2000 |
|
RU2174238C1 |
| Программно-аппаратный комплекс тестирования систем автоматического и/или полуавтоматического детектирования и локализации объектов в видеопоследовательности | 2018 |
|
RU2714182C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2373550C1 |
| ИМИТАТОР СИГНАЛОВ ДОПЛЕРОВСКИХ ЧАСТОТ И ПОМЕХ | 2008 |
|
RU2374662C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| Контрольно-проверочный комплекс радиолокационных станций самолёта | 2022 |
|
RU2792260C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
Изобретение относится к области радиолокации, в частности к устройствам контроля работоспособности радиолокационных систем. Достигаемый технический результат – обеспечение синхронной работы устройства наземного контроля радиолокационной системы управления в режиме реального времени. Указанный результат достигается за счет того, что устройство наземного контроля радиолокационной системы управления содержит имитатор шумового сигнала, имитатор ответного сигнала, антенну, устройство аттенюаторов, имитатор зондирующего сигнала, имитатор уводящего сигнала, имитатор прицельного сигнала, имитатор многократного сигнала, коммутирующее устройство, радиолокационную систему управления (РЛСУ), устройство сопряжения, устройство регистрации, вычислитель сигналов управления РЛСУ, имитатор сигналов системы индикации, вычислитель сигналов исполнительных объектов, вычислитель навигационных сигналов, блок контроля и коммутации и блок управления. Для обеспечения синхронной работы предлагаемого устройства наземного контроля радиолокационной системы управления в режиме реального времени введены запоминающее устройство, преобразователь характеристик временной диаграммы и устройство задержки импульсов. Перечисленные средства определенным образом соединены между собой. 6 ил.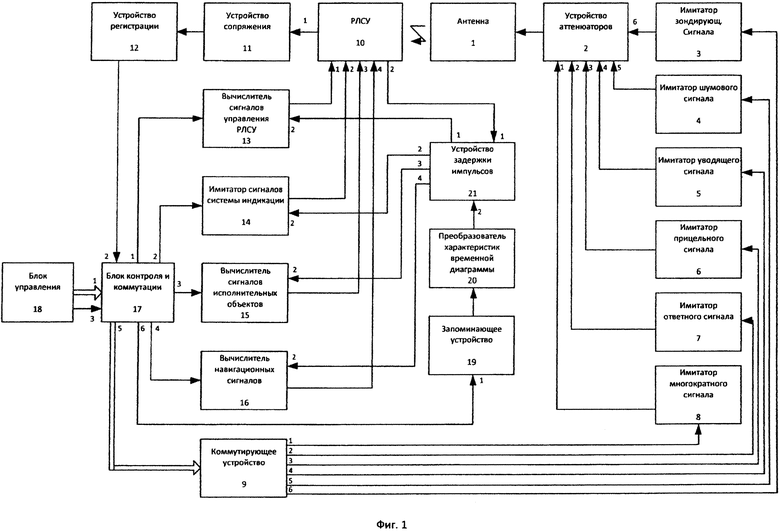
Устройство наземного контроля радиолокационных систем управления, содержащее имитатор шумового сигнала, имитатор ответного сигнала, антенну, устройство аттенюаторов, имитатор зондирующего сигнала, имитатор уводящего сигнала, имитатор прицельного сигнала, имитатор многократного сигнала, коммутирующее устройство, радиолокационную систему управления (РЛСУ), устройство сопряжения, устройство регистрации, вычислитель сигналов управления РЛСУ, имитатор сигналов системы индикации, вычислитель сигналов исполнительных объектов, вычислитель навигационных сигналов, блок контроля и коммутации и блок управления, причем блок управления шиной соединен с первым входом блока контроля и коммутации, первый выход которого соединен с входом вычислителя сигналов управления РЛСУ, а выход вычислителя сигналов управления РЛСУ соединен с первым входом РЛСУ, второй выход блока контроля и коммутации подключен ко входу имитатора сигналов системы индикации, выход которого соединен со вторым входом РЛСУ, третий выход блока контроля и коммутации подключен ко входу вычислителя сигналов исполнительных объектов, выход которого соединен с третьим входом РЛСУ, четвертый выход блока контроля и коммутации соединен со входом вычислителя навигационных сигналов, выход которого подключен к четвертому входу РЛСУ, пятый выход блока контроля и коммутации шиной соединен со входом коммутирующего устройства, первый выход которого соединен со входом имитатора многократного сигнала, выход имитатора многократного сигнала подключен к первому входу устройства аттенюаторов, второй выход коммутирующего устройства соединен с входом имитатора ответного сигнала, выход имитатора ответного сигнала подключен ко второму входу устройства аттенюаторов, третий выход коммутирующего устройства соединен со входом имитатора прицельного сигнала, выход имитатора прицельного сигнала соединен с третьим входом устройства аттенюаторов, четвертый выход коммутирующего устройства соединен со входом имитатора уводящего сигнала, выход имитатора уводящего сигнала подключен к четвертому входу устройства аттенюаторов, пятый выход коммутирующего устройства подключен ко входу имитатора шумового сигнала, выход имитатора шумового сигнала соединен с пятым входом устройства аттенюаторов, шестой выход коммутирующего устройства соединен со входом имитатора зондирующего сигнала, выход имитатора зондирующего сигнала подключен к шестому входу устройства аттенюаторов, выход устройства аттенюаторов соединен с антенной, кроме того, выход РЛСУ соединен со входом устройства сопряжения, выход устройства сопряжения соединен со входом устройства регистрации, а выход устройства регистрации подключен ко второму входу блока контроля и коммутации, отличающееся тем, что дополнительно введены запоминающее устройство, преобразователь характеристик временной диаграммы и устройство задержки импульсов, причем шестой выход блока контроля и коммутации соединен со входом запоминающего устройства, выход которого подключен ко входу преобразователя характеристик временной диаграммы, выход преобразователя характеристик временной диаграммы соединен со вторым входом устройства задержки импульсов, первый вход которого подключен ко второму выходу РЛСУ, первый выход устройства задержки импульсов подключен ко второму входу вычислителя сигналов управления РЛСУ, второй выход устройства задержки импульсов соединен со вторым входом имитатора сигналов системы индикации, третий выход устройства задержки импульсов подключен ко второму входу вычислителя сигналов исполнительных элементов, четвертый выход устройства задержки импульсов соединен со вторым входом вычислителя навигационных сигналов.
| УСТРОЙСТВО НАЗЕМНОГО КОНТРОЛЯ РАДИОЛОКАЦИОННЫХ СИСТЕМ УПРАВЛЕНИЯ | 2000 |
|
RU2174238C1 |
| ИМИТАТОР ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2015 |
|
RU2591045C1 |
| Установка для заполнения свободных от нефтепродуктов объемов наливных емкостей газами из дымохода парового котла | 1955 |
|
SU106393A1 |
| СПОСОБ ИМИТАЦИИ МНОГОПОЗИЦИОННОЙ РАДИОЭЛЕКТРОННОЙ ОБСТАНОВКИ | 2007 |
|
RU2326399C1 |
| Способ системно-динамического представления радиоэлектронной обстановки для профессиональной подготовки специалистов радиомониторинга | 2016 |
|
RU2627255C1 |
| WO 1992022050 A1, 10.12.1992 | |||
| US 6633251 B1, 14.10.2003 | |||
| US 20060001568 A1, 05.01.2006. | |||

