Изобретение относится к способу и устройству для торможения рельсового транспортного средства, а также к рельсовому транспортному средству с устройством. Изобретение пригодно для рельсовых транспортных средств с тормозной системой, к которой в виде входной величины подводится заданное значение тормозного действия (например, заданное значение тормозной силы или заданное значения крутящего момента торможения) и которая тем самым является управляемой.
Прежде всего, изобретение относится к тормозным системам с тормозным действием, которое соответственно заданному значению тормозного действия направлено против направления движения, то есть сохранение тормозного действия после момента времени остановки транспортного средства приводит к возобновлению движения в противоположном направлении. Примерами таких тормозных систем являются электродинамические тормозные системы, которые приводят в действие по меньшей мере один приводной двигатель транспортного средства как электрический генератор. Напротив, механические тормозные системы и токовихревые тормоза действуют одинаковым образом независимо от направления движения.
Кроме того, изобретение относится к проблематичности торможения транспортного средства до остановки. Если для торможения до остановки используются обычные механические тормозные системы, то для людей в транспортном средстве возникает неприятный толчок. Эти механические тормозные системы рельсовых транспортных средств не являются управляемыми удовлетворительным образом посредством заданного значения тормозного действия. Также механические тормозные системы изнашиваются при использовании во время движения вследствие трения.
WO 03/086809 А1 предлагает электродинамическое торможение рельсового транспортного средства до остановки, причем ускорение рельсового транспортного средства регулируется в зависимости от его скорости.
Задача настоящего изобретения заключается в том, чтобы комфортабельно для находящихся в транспортном средстве людей затормозить рельсовое транспортное средство в короткое время до остановки.
Согласно основной идее настоящего изобретения процесс торможения выполняют в течение большого числа фаз торможения, во время которых заданное значение тормозного действия генерируют и выдают разным образом. При этом является предпочтительным, когда в первой фазе торможения заданное значение тормозного действия генерируют и выдают в зависимости от запроса на торможение. Запрос на торможение, прежде всего, может быть запросом водителя транспортного средства, который, например, подает запрос на замедление (отрицательное ускорение) транспортного средства или приложение силы торможения (например, отрицательной силы тяги, вырабатываемой посредством по меньшей мере одного приводного двигателя транспортного средства). Прежде всего, запрос на торможение могут выдавать неизмененным как заданное значение тормозного действия, причем под «неизмененным» следует также понимать, что запрос на торможение пересчитывают в соответствующую величину. Этот пересчет происходит, например, когда водитель выдает запрос на приложение силы торможения или замедление, однако заданное значение тормозного действия является заданным значением крутящего момента торможения.
Однако во многих случаях для эксплуатации транспортного средства существует максимальное значение замедления, то есть замедление транспортного средства не должно превышать максимального значения, причем на практике может происходить незначительное превышение по причине динамики движения транспортного средства и по причине свойств устройства управления. Поэтому предлагается в первой фазе торможения заданное значение тормозного действия генерировать и выдавать в зависимости от запроса на торможение, причем замедление рельсового транспортного средства ограничивают/ограничено до заданного максимального значения замедления. Прежде всего, поэтому запрос на торможение преобразуют неизмененным в заданное значение тормозного действия, когда вследствие этого заданное максимальное замедление не превышается или только по описанным выше причинам превышается незначительно и/или кратковременно. Например, во время первой фазы торможения могут использовать / иметь первый регулятор для генерирования заданного значения тормозного действия, причем к регулятору в виде входной величины подводят запрос на торможение (например, водителя или автоматической системы управления транспортным средством), и причем регулятор в виде выходной величины генерирует заданное значение тормозного действия, ограниченное соответственно заданному максимальному значению замедления. Например, регулятор может быть или неактивным или изменять запрос на торможение без ограничений, когда запрос на торможение не приводит к замедлению, которое больше, чем заданное максимальное значения замедления. С другой стороны, регулятор может быть, например, активным, когда запрос на торможение привел бы к большему замедлению, чем максимальное значение замедления. В этом случае активный регулятор может ограничивать запрос на торможение соответственно заданному максимальному значению замедления, так что оно не будет превышено, и соответственно своей характеристике регулирования выдавать заданное значение тормозного действия. Например, в случае первого регулятора речь идет о регуляторе с интегральным регулированием, причем альтернативно или дополнительно могут присутствовать также другие компоненты, такие как пропорциональное регулирование и/или дифференциальное регулирование.
В более поздней фазе торможения, которая выполняется после первой фазы торможения, предлагается генерировать заданное значение тормозного действия посредством регулятора остановки как выходную величину регулятора, причем к регулятору остановки в виде входной величины регулятора подводят кинематическую величину движения рельсового транспортного средства и движением транспортного средства управляют посредством регулятора остановки до остановки. Согласно прилагаемым пунктам формулы изобретения в случае кинематической величины речь идет о скорости движения рельсового транспортного средства, которую посредством регулятора остановки регулируют до равного нулю заданного значения.
Прежде всего, в случае регулятора остановки речь может идти о регуляторе с интегральным регулированием, причем интегральное регулирование при генерировании выходной величины регулятора учитывает интеграл кинематической величины по времени, прошедшему с начала процесса регулирования. Альтернативно или дополнительно, регулятор остановки может иметь по меньшей мере другой регулирующий компонент, прежде всего пропорциональное регулирование и факультативно также дифференциальное регулирование. Начало процесса регулирования регулятора остановки может быть, прежде всего, как будет более точно описано ниже, началом второй или третьей фазы торможения. В каждом случае регулирование во время последующей фазы торможения на основании свойств регулятора остановки приводит к тому, что транспортное средство останавливается.
Разделение процесса торможения на множество фаз торможения имеет преимущество, что, прежде всего, в первой фазе торможения могут тормозить с максимально допустимым замедлением, а в последней, приводящей к остановке фазе торможения могут тормозить до остановки комфортабельно для людей в транспортном средстве и, прежде всего, с небольшими толчками (рывками). Поэтому это торможение до остановки удается выполнить за более короткое время, чем когда регулятор остановки является активным уже в начале торможения.
Кроме способа торможения рельсового транспортного средства, которое имеет управляемую тормозную систему, к объему изобретения также относится устройство для торможения рельсового транспортного средства, причем устройство имеет устройство вывода для выдачи заданного значения тормозного действия в виде входной величины для управляемой тормозной системы рельсового транспортного средства. Устройство имеет генерирующий узел для осуществления способа торможения рельсового транспортного средства согласно одному из вариантов осуществления, который описан в этом описании. Кроме того, в объем изобретения входит рельсовое транспортное средство с устройством, причем рельсовое транспортное средство имеет управляемую заданным значением тормозного действия в виде входной величины тормозную систему.
Заданное значение тормозного действия является изменяемой с течением времени величиной, так как она, как правило, во время процесса торможения до остановки транспортного средства не остается постоянной. Поэтому заданное значение тормозного действия генерируется, прежде всего, повторно или непрерывно и выдается тормозной системе. Повторяющееся генерирование и выдача заданного значения тормозного действия может быт также названо циклическим. Прежде всего, в каждом цикле могут учитывать по меньшей мере одну входную величину генерирующего узла или входную величину циклического способа с фактически имеющимся значением. В первой фазе торможения входной величиной является, прежде всего, запрос на торможение, например запрос на силу торможения или запрос на крутящий момент торможения. Крутящим моментом является, например, крутящий момент по меньшей мере одного приводного двигателя транспортного средства, который во время электродинамического процесса торможения приводится в действие как генератор. Например, устройство управления по меньшей мере одного приводного двигателя может быть выполнено так, чтобы принимать в виде входной величины заданное значение тормозной силы или заданное значение крутящего момента торможения. Система управления или регулирования преобразует это заданное значение тормозного действия, прежде всего по возможности без задержки по времени, между тем как она соответствующим образом управляет по меньшей мере одним приводным двигателем.
В более поздней фазе торможения, в которой регулятор остановки регулирует скорость движения до равного нулю заданного значения, входной величиной, а именно входной величиной регулятора остановки, является, прежде всего, скорость движения. Информацию о скорости движения могут получать, прежде всего, от обычно имеющихся измерительных систем транспортного средства. Например, по меньшей мере одно колесо рельсового транспортного средства может быть объединено с измерителем числа оборотов. Понятие «скорость движения» включает в себя также эквивалентные первой производной от пути движения по времени величины, например измеренную частоту вращения. Поэтому скорость движения может также иметь единицей измерения частоту вращения, то есть число оборотов колеса за единицу времени. Прежде всего, если скорость движения подведена непосредственно к регулятору остановки как входная величина, то регулятор регулирует скорость движения до равного нулю заданного значения. Кроме того, возможно, что регулятор остановки принимает в виде входной величины не непосредственно скорость движения, а другую кинематическую величину, из которой регулятор остановки определяет скорость движения. Такой другой кинематической величиной является, например, пройденный транспортным средством путь как функция времени или ускорение транспортного средства как функция времени.
Однако не исключено и даже является предпочтительным, что и в более поздней фазе торможения учитывают запрос на торможение и, прежде всего, в каждом цикле. Если, например, водитель транспортного средства прервет процесс торможения, в то время как он вместо силы торможения подаст запрос на силу тяги, то это, предпочтительно, следует учитывать также в отношении работы регулятора остановки. Например, регулятор остановки может сам обнаружить прерывание процесса торможения и завершить свою работу. Альтернативно, регулятор остановки может быть переключен вышестоящей системой управления в неактивное состояние. То же самое справедливо для факультативной второй фазы торможения, которая выполняется между первой фазой торможения и более поздней фазой торможения. Также и эта вторая фаза торможения может быть прервана в зависимости от текущего запроса на торможение.
Учет изменений по меньшей мере одной входной величины генерирующего узла или способа делает возможным, как уже упоминалось, генерирование заданного значения тормозного действия как изменяемой с течением времени величины и выдачу непрерывно или неоднократно изменяемой с течение времени величины.
Предпочтительно, в следующей после первой фазы торможения второй фазе торможения автоматически непрерывно уменьшают и выдают величину заданного значения тормозного действия. При этом уменьшение величины заданного значения тормозного действия в течение интервала времени соответствует заданному максимальному значению толчка. Более поздняя фаза торможения, в которой регулятор остановки регулирует спорость движения до равного нулю заданного значения, в этом случае может называться третьей фазой торможения, которая следует за второй фазой торможения. Это уменьшение величины заданного значения тормозной силы согласно заданному максимальному значению толчка приводит соответственно определению толчка как первой производной по времени ускорения транспортного средства к постоянному уменьшению величины ускорения транспортного средства во второй фазе торможения. Поэтому соответствующий график «ускорение-время» имеет прямую, наклон которой равен максимальному значению толчка. Поскольку во время процесса торможения величина отрицательного ускорения транспортного средства уменьшается, ускорение увеличивается, и увеличение определяется положительным максимальным значением толчка. Максимальное значение толчка может быть, например, жестко заданным изготовителем транспортного средства максимальным значением, которое остается неизменным. Альтернативно, максимальное значение толчка могут задавать, например, в зависимости от того, должно ли движение транспортного средства быть для находящихся в нем людей более комфортабельным или менее комфортабельным, как разное по величине значение. Также возможно, что максимальное значение толчка во время движения изменяют. При этом не исключается, что заданное максимальное значение толчка во время второй фазы торможения изменяют. Однако во время второй фазы торможения предпочтительным будет постоянное заданное максимальное значения толчка.
В одном варианте осуществления второй фазы торможения имеется другое предписание, согласно которому величина заданного значения тормозного действия уменьшают. Например, может быть задано, что ускорение транспортного средства во время второй фазы торможения увеличивается согласно параболической функции времени. Уменьшение величины заданного значения тормозного действия за интервал времени согласно заданному максимальному значению толчка имеет, однако, преимущество, что ускорение во время второй фазы торможения увеличивается максимально допустимым образом (то есть, его величина уменьшается). Поэтому за первой фазой торможения, например, с постоянной силой торможения и (отрицательным) ускорением, следует с соблюдением максимально допустимого толчка и обеспечения этим самым комфорта поездки уменьшение силы торможения, то есть увеличение ускорения. Поэтому этот образ действия приводит к особенно короткой длительности общего процесса торможения при одновременном соблюдении комфорта поездки.
Прежде всего, является предпочтительным предварительно вычислять момент времени начала второй фазы торможения. Благодаря результату предварительного вычисления задают, к какому моменту времени заканчивается первая фаза торможения и начинается вторая фаза торможения.
Предпочтительно, этот момент времени перехода косвенно предварительно вычисляют тем, что вычисляют скорость движения транспортного средства, при достижении которой заканчивается первая фаза торможения и начинается вторая фаза торможения. Это может быть реализовано на практике простым образом, когда транспортное средство, как обычно, оснащено системой измерения скорости движения. Если эта система измерения в качестве измеренной величины выдает предварительно вычисленное значение скорости или при повторной проверке это значение уже ниже предварительно вычисленного значения скорости для переключения на вторую фазу торможения, то первая фаза торможение заканчивается и начинается вторая фаза торможения. Прежде всего, эту переходную скорость вычисляют, как только начинается первая фаза торможения. Поскольку первая фаза торможения, в общем, в зависимости от изменения во времени запроса на торможение может протекать по разному, является предпочтительным, что переходную скорость во время первой фазы торможения вычисляют неоднократно, и вычисленное в последнюю очередь значение является действующим для перехода во вторую фазу торможения. Это не исключает того, что последнее определенное значение определяют с учетом изменения во времени определенного ранее значения скорости переключения во время одного и того же процесса торможения, например путем использования фильтра, который сглаживает изменение во времени определенного значения скорости переключения.
Прежде всего, предварительно вычисленное значение скорости вычисляют в зависимости от одной из нижеупомянутых величин или в зависимости от комбинации двух или трех из нижеупомянутых величин: сгенерированного заданного значения тормозного действия во время первой фазы торможения, заданного максимального значения замедления и заданного максимального значения толчка. Если значение одной из этих величин должно измениться во время первой фазы торможения, то является предпочтительным, что предварительно вычисленное значение скорости вычисляют в зависимости от последнего действующего значения соответствующие величины. В случае, когда соответствующую величину учитывают при предварительном вычислении значения переходной скорости, предпочтительно, является справедливым следующее: чем больше сгенерированное заданное значение тормозного действия во время первой фазы торможения, тем больше предварительно вычисленное значение скорости перехода, и наоборот. Чем больше заданное максимальное значение замедления, тем больше предварительно вычисленное значение переходной скорости. Чем меньше заданное максимальное значение толчка, тем больше предварительно вычисленное значение переходной скорости. Прежде всего, предварительно вычисленное значение переходной скорости может быть обратно пропорциональным заданному максимальному значению толчка.
Вместо заданного максимального значения замедления могут использовать фактическое (прежде всего измеренное) значение замедления транспортного средства для предварительного вычисления значения переходной скорости. Это справедливо, прежде всего, для случая, когда замедление транспортного средства в конце первой фазы торможения не достигает заданного максимального значения замедления, а находится ниже его, то есть отрицательное ускорения находится выше его заданного минимального значения.
Прежде всего, предварительно вычисленное значение переходной скорости зависит от фактически действующего значения замедления. Посредством этого учитывают, на каком уровне находится замедление и тем самым, прежде всего, сила торможения или крутящий момент торможения, когда заканчивается первая фаза торможения. При этом более высокое значение замедления приводит к более высокому предварительно вычисленному значению переходной скорости, и наоборот. Иначе говоря, при более высоком уровне замедления предпочтительно завершить первую фазу торможения при более высоком значении скорости движения транспортного средства и тем самым завершить раньше, чем при более низком уровне замедления. При более высоком уровне из-за ограничения толчка до заданного максимального значения толчка после окончания первой фазы торможения требуется больше времени, чтобы уменьшить ускорение до нуля.
Вышеупомянутое уменьшение величины заданного значения тормозного действия во время второй фазы торможения могут, прежде всего, вызывать соответствующим ограничивающим устройством. Например, ограничивающее устройство в виде входной величины получает сгенерированное другим устройством заданное значение тормозного действия. Ограничивающее устройство проверяет, удовлетворяет ли выдача этого заданного значения тормозного действия критерию, что следующий из него толчок не превышает заданное максимальное значение толчка. Если это верно, то ограничивающее устройство ограничивает заданное значение тормозного действия до значения, которое соответствует изменению ускорения транспортного средства с заданным максимальным значением толчка. В ином случае ограничивающее устройство выдает полученное в виде входной величины заданное значение тормозного действия неизмененным. Выходная величина ограничивающего устройства может быть использована как выходная величина всего генерирующего узла или как результат способа, то есть выходная величина является входной величиной для управляемой тормозной системы.
Такое ограничивающее устройство делает возможным активировать регулятор остановки во время второй фазы торможения и, прежде всего, с началом второй фазы торможения, то есть начать работу регулятора остановки. Если регулятор остановки в виде выходной величины генерирует заданное значение тормозного действия, которое не удовлетворяет вышеназванному критерию, то ограничивающее устройство соответственно ограничивает это значение. Прежде всего, поэтому выход регулятора остановки соединен с входом ограничивающего устройства.
Независимо от конкретного выполнения генерирующего узла, регулятор остановки могут активировать, прежде всего, при переходе от первой фазы торможения во вторую фазу торможения, и уже во второй фазе торможения он генерирует тормозное действие как выходную величину регулятора, причем, однако, во второй фазе торможения управляемой тормозной системе выдают заданное значение тормозного действия, которое соответствует уменьшению величины заданного значения тормозного действия в течение интервала времени соответственно заданному максимальному значения толчка. Это, как и в описанном ранее выполнении ограничивающего устройства, имеет преимущество, что переход от второй фазы торможения в третью фазу торможения происходит автоматически, когда регулятор остановка генерирует значения, которые не приводят к толчку, превышающему заданное максимальное значение толчка. Прежде всего, поэтому не требуется заранее определять момент времени для перехода от второй в третью фазу торможения.
Является предпочтительным, что регулятор остановки имеет интегральное регулирование, которое при генерировании выходной величина регулятора учитывает интеграл скорости движения по времени, прошедшему с начала второй фазы торможения. Интегральное регулирование хотя и является сравнительно медленным, но приводит к уменьшению скорости движения до нуля. Наличие интегрального регулирования не исключает, что регулятор остановки имеет еще один компонент, который влияет на генерирование выходной величины регулятора, прежде всего пропорциональное регулирование или интегральное регулирование с пропорциональным регулированием, то есть регулятор остановки является PI-регулятором.
Процесс торможения может происходить, когда транспортное средство движется по ровной местности. Однако часто случается, что транспортное средство во время процесса торможения движется по поднимающейся местности (в гору) или опускающейся местности (под гору). При движении в гору в качестве дополнительной силы торможения действует сила сопротивления движению на подъеме. Поэтому создаваемая тормозной системой сила торможения меньше, чем на ровной местности. Для движения с горы соответствующее действие является противоположным. Для учета влияния силы сопротивления движению на подъеме будет предпочтительным, что интегральному регулированию зададут отрицательное начальное значения тормозного действия, которое с течением времени в возрастающей степени компенсируется итоговым значением интеграла. В зависимости от действия силы сопротивления движению на подъеме, отрицательное начальное значение с течение времени не компенсируют, компенсируют полностью или более чем полностью. Отрицательное значение тормозного действия означает, что возникнет не тормозное действие, а положительное ускоряющее действие, когда транспортное средство будет подвержено этому действию. В отношении отрицательного начального значения речь идет, однако, о значении, которое из-за ограничения толчка во время второй фазы торможения выдается тормозной системе не как заданное значение тормозного действия. Более того, во время второй фазы торможения результирующее значение интеграла скорости движения с течением времени увеличивается. Однако в процессе торможения во время движения транспортного средство в гору результат интегрального регулирования может быть отрицательным значением тормозного действия, когда вторая фаза торможения переходит в третью фазу торможения. Однако, предпочтительно, дополнительно имеется пропорциональное регулирование, которое в любом случае генерирует положительное тормозное действие, пока скорость движения еще не достигла нулевого значения. PI-регулятор, прежде всего по причине отрицательно начального значения тормозного действия для интегрального регулирования, имеет преимущество, что заданное значение тормозного действия колеблется лишь незначительно, и после достижения неподвижного состояния транспортного средства не приводит к началу движения транспортного средства в противоположном направлении. Иначе говоря, по причине выполнения регулятора остановки небольшие изменения заданного значения тормозного действия в течение интервала времени приводят к торможению транспортного средства при очень небольшом толчке. Однако так как первая и вторая фазы торможения выполнены и в конце второй фазы торможения достигнута уже очень низкая скорость движения, третья фаза торможения по сравнению с описанным в WO 03/086809 А1 процессом торможения требует меньшей времени.
Отрицательное начальное значение тормозного действия, предпочтительно, выбирают тем меньшим (то есть, его величина тем больше), чем больше заданное значение тормозного действия к началу второй фазы торможения, и наоборот. Прежде всего, отрицательное начальное значение тормозного действия образуют путем изменения знака заданного значения тормозного действия, которое выдается тормозной системе к началу второй фазы торможения или является действующим к началу второй фазы торможения. Эта величина заданного значения тормозного действия к началу второй фазы торможения идентична величине заданного значения тормозного действии в конце первой фазы торможения. Поскольку заданное значение тормозного действия в процессе торможения во время движения в гору в начале второй фазы торможения меньше, чем во время процесса торможения при движении под гору, то достигается требуемый вышеописанный эффект интегрального регулирования.
Как упоминалось выше, генерирующий узел устройства для торможения рельсового транспортного средства, прежде всего, выполнен так, что генерирующий узел выполняет способ генерирования заданного значения тормозного действия. Поэтому возможные варианты осуществления устройства и генерирующего узла следуют из описания соответствующих вариантов осуществления способа и еще раз здесь повторяться не будут.
Выполнение второй фазы торможения при активированном регуляторе остановки с интегральным регулированием имеет еще одно преимущество. В первой фазе торможения при определенных условиях происходит ограничение запроса на торможение соответственно заданному максимальному значению замедления. Правда, в зависимости от массы транспортного средства (например, полностью загруженное транспортное средством или транспортное средство с весом в порожнем состоянии) требуется разная тормозная сила, чтобы достичь одного и того же замедления транспортного средства. Однако во время первой фазы торможения это из-за ограничений замедления может быть реализовано простым образом. Например, к соответствующему устройству ограничения замедления подводят измеренное значение фактического ускорения транспортного средства или значение им вычисляется, и ограничивающее устройство при превышении максимального значения замедления может уменьшить заданное значение тормозного действия. А именно, в третьей фазе торможения, в которой регулятор остановки регулирует скорость движения до равного нулю требуемого значения, поведение регулятора зависит от массы транспортного средства. Однако благодаря интегральному регулированию, регулятор имеет время, чтобы согласовать свое поведение с массой транспортного средства. Во время предыдущей второй фазы торможения с уменьшением тормозного действия согласно предыдущему максимальному значению толчка, заданное значение тормозного действия, однако, устанавливают соответственно фактически имеющейся массе транспортного средства. При большей массе транспортного средства в конце второй фазы торможения также и заданное значение тормозного действие более высокое, и наоборот. Поэтому результат интегрального регулирования соответствует началу третьей фазы торможения уже с согласованным с массой транспортного средства заданным значением тормозного действия.
Теперь варианты осуществления изобретения будут описаны со ссылкой на прилагаемый чертеж. На отдельных фигурах чертежа показано:
фиг. 1 - схематически структурная схема устройств рельсового транспортного средства, которые участвуют в процессе торможения и его управлении/регулировании,
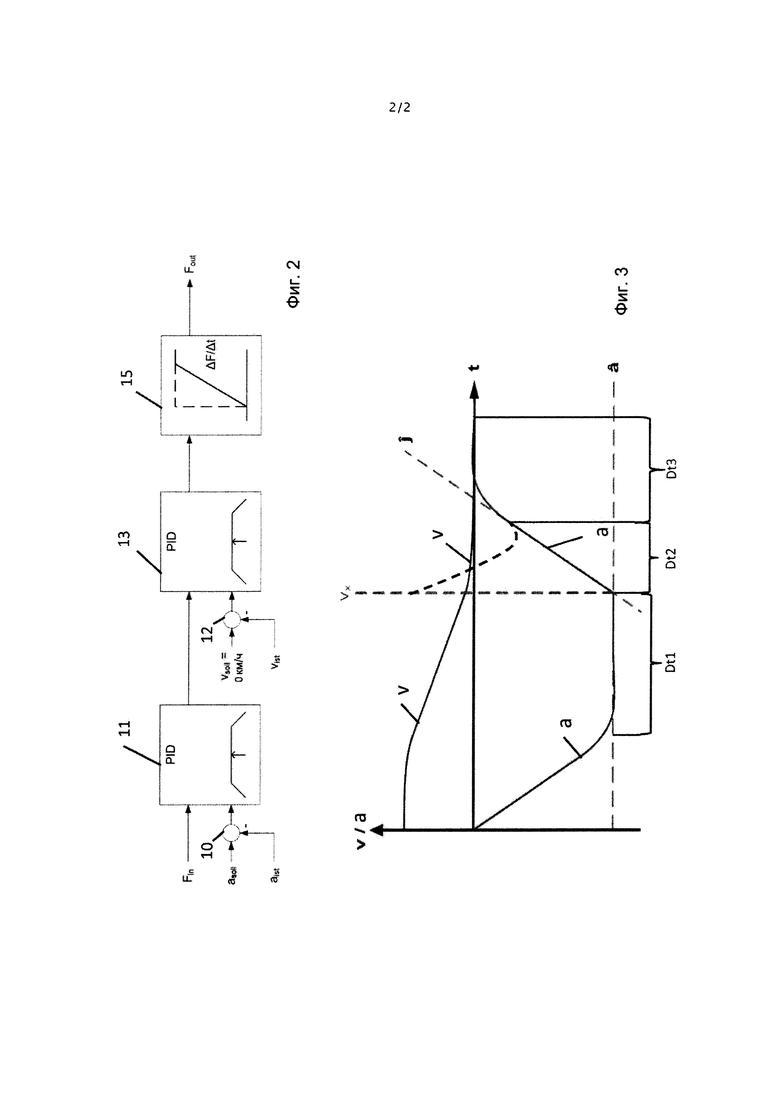
фиг. 2 - пример осуществления генерирующего узла для генерирования заданного значения тормозного действия в виде входной величины управляемой тормозной системы и
фиг. 3 - скорость транспортного средства и ускорение во время разных фаз торможения процесса торможения до остановки транспортного средства, прежде всего, для показанного на фиг. 2 примера осуществления.
Показанное на фиг. 1 запрашивающее устройство 1 выполнено так, чтобы генерировать и выдавать запрос на торможение. Выход запрашивающего устройства 1, как показано стрелкой, соединен с входом генерирующего заданного значение тормозного действия узла 3, который выполнено для приема в виде входной величины запроса на торможение. Выход генерирующего заданное значение тормозного действия узла 3, как показано другой стрелкой, соединен с входом тормозной системы 5, которая выполнена для торможения транспортного средства согласно принятому в виде входной величины заданному значению тормозного действия. Действие тормозной системы 5 на рельсовое транспортное средство показано указывающей, исходя из транспортной системы 5, вправо стрелкой, которая указывает на символически представленное колесо 7 транспортного средства. Вследствие торможения скорость колеса 7 и, тем самым, транспортного средства уменьшается. В примере осуществления с колесом 7 объединено измерительное устройство 9, которое измеряет скорость движения транспортного средства как функцию времени. Измерительное устройство 9 выполнено для генерирования соответствующих измеренных значений и в примере осуществления подведения к генерирующему заданное значение тормозного действия узлу 3, который из них получает, прежде всего, информацию о фактическом измеренном замедлении и/или фактической измеренной скорости транспортного средства. Конкретный предпочтительный пример осуществления устройства генерирования заданного значения тормозного действия, прежде всего показанного на фиг. 1 генерирующего узла 3, схематически показан на фиг. 2. В показанном примере осуществления запрос на торможение, который подводится к генерирующему узлу, является требуемой силой Fin торможения. Во время первой фазы торможения запрос на торможение подводится к устройству 11, которое в конкретном примере осуществления выполнено как первый регулятор. В качестве примера используется обозначение PID, которое указывает, что в случае первого регулятора 11 речь может идти о регуляторе с пропорциональным, интегральным и дифференциальным образом действия. То же самое справедливо для второго регулятора 13, который будет рассмотрен более подробно. Активное во время первой фазы торможения устройство 11 имеет дополнительный вход, через который оно принимает опорное значение от сравнивающего устройства 10, которое сравнивает требуемое ускорение asoll с фактическим, прежде всего измеренным, фактическим ускорением aist, и выдает их разность как опорное значение устройству 11. Прежде всего, в случае требуемого ускорения аsoll речь может идти о выходной величине не показанного на фиг. 2 ограничивающего устройства, которое ограничивает величину ускорения транспортного средства до заданного максимального значения замедления. Это ограничение происходит, прежде всего, тогда, когда из запрошенной силы торможения Fin - или в одном варианте осуществления из запрошенного замедления - получается значение замедления, которое больше, чем заданное максимальное значение замедления. В еще одном варианте осуществления генерирующего узла устройство 11 во время первой фазы торможения может при необходимости преобразовывать ограниченное заданным максимальным значением замедление в соответствующее заданное значение тормозного действия, прежде всего пересчитывать с учетом массы транспортного средства.
В показанном на фиг. 2 примере справа представлена выходная величина - заданное значение Fout тормозной силы. Во время первой фазы торможения это выходная величина, которая генерируется и выдается непосредственно первым устройством 11. Дополнительные показанные на фиг. 2 устройства 13 и 15 во время первой фазы торможения, прежде всего, не активны. Заданное значение Fout тормозной силы через эти устройства 13, 15 не должно выдаваться. Последовательное изображение на фиг. 2, которое показывает устройства 11, 13, 15 подключенными друг за другом, следует понимать лишь схематически. Однако не исключено, что выходная величина устройства 11 выдается по меньшей мере через одно из устройств 13, 15.
Прежде всего, посредством не показанного на фиг. 2 предварительно вычисляющего устройства, которое может также иметься в иных, чем показанный на фиг. 2, вариантах осуществления генерирующего узла, вычисляется значение скорости vx, посредством которого устанавливается переход между первой фазой торможения и второй фазой торможения. Предпочтительно, это предварительно вычисленное значение скорости вычисляется согласно следующему уравнению:

При этом обозначают:  - заданное максимальное значение замедления, Fout - как упомянуто выше, заданное значение тормозной силы (и, предпочтительно, последнее действующее во время первой фазы торможения значение), и ΔF/Δt - величину уменьшения тормозной силы, который соответствует заданному максимальному значению толчка при заданной или фактически имеющейся массе транспортного средства. Формула имеет преимущество, что она комбинирует друг с другом названные выше перед описанием фигур влияющие на предварительное вычисление переходной скорости величины. Прежде всего, когда замедление в первой фазе торможения не достигает заданного максимального значения замедления, вместо заданного максимального значения замедления а в первой фазе торможения для формулы используется фактическое замедление а (а именно, предпочтительно, последнее действующее во время первой фазы торможения значение).
- заданное максимальное значение замедления, Fout - как упомянуто выше, заданное значение тормозной силы (и, предпочтительно, последнее действующее во время первой фазы торможения значение), и ΔF/Δt - величину уменьшения тормозной силы, который соответствует заданному максимальному значению толчка при заданной или фактически имеющейся массе транспортного средства. Формула имеет преимущество, что она комбинирует друг с другом названные выше перед описанием фигур влияющие на предварительное вычисление переходной скорости величины. Прежде всего, когда замедление в первой фазе торможения не достигает заданного максимального значения замедления, вместо заданного максимального значения замедления а в первой фазе торможения для формулы используется фактическое замедление а (а именно, предпочтительно, последнее действующее во время первой фазы торможения значение).
Показанный на фиг. 2 второй регулятор 13 является регулятором остановки, который, предпочтительно, активируется вместе с переходом от первой во вторую фазу торможения. Второй регулятор 13 получает в виде входной величины, прежде всего, измеренную фактическую скорость движения. Только для примера на стороне входа второго регулятора 13 показано второе сравнивающее устройство 12, которое сравнивает фактическую скорость Vist с ее заданным значением Vsoll и образует их разность. Впрочем, заданное значение скорости движения равно нулю, отчего от второго сравнивающего устройства 12 можно отказаться, и фактическое значение Vist может подводиться непосредственно ко второму регулятору. Факультативно, ко второму регулятору 13 подводится запрос на торможение, во втором примере осуществления - запрос на силу Fin торможения, чтобы при необходимости иметь возможность прервать процесс торможения, когда тормозное действие больше не требуется.
Во время второй фазы торможения второй регулятор 13 уже генерирует непрерывно или циклически заданное значение тормозного действия, которое он через выход выдает на вход огранивающего устройства 15. Ограничивающее устройство 15 ограничивает заданное значение тормозного действия так, чтобы толчок транспортного средства не превысил заданное максимальное значение толчка. До тех пор, то есть во время второй фазы торможения, пока второй регулятор 13 генерирует и выдает значения заданного тормозного действия, которые бы привели к толчку выше заданного максимального значения толчка, ограничивающее устройство 15 ограничивает толчок до заданного максимального значения толчка, то есть выдаваемое во втором примере осуществления как заданное значение силы Fout торможения заданное значение тормозного действия уменьшается непрерывно с одинаковым уклоном в течение интервала времени. Это в блоке на фиг. 2, который представляет собой ограничивающее устройство 15, показано прямой с обозначением ΔF/Δt.
Когда выдаваемое вторым регулятором 13 заданное значение тормозного действия больше не приводит к ограничивающему толчок уменьшению заданного значения тормозного действия ограничивающим устройством 15, начинается третья фаза торможения, во время которой скорость движения Vist регулируется вторым регулятором 13 до нуля.
На фиг. 3 показан пример, прежде всего, изменения во времени скорости v движения и ускорения а транспортного средства во время процесса торможения как функцию времени t. Слева на графике показана фаза процесса торможения, которая происходит уже перед фазой торможения. В этой фазе скорость v движения сначала уменьшается еще незначительно в течение интервала времени, и замедление -а в примере осуществления повышается приблизительно прямолинейно, ограниченное заданным максимальным значением толчка, величина которого также действительна как максимальное значение для увеличения замедления.
В следующей первой фазе торможения Dt1 происходит ограничение ускорения а или замедления -а до максимального значения замедления. В случае регулятора, который, например, является регулятором 11, замедление -а может незначительно превышать заданное максимальное значение замедления, то есть показанное на фиг. 3 изменение во времени ускорения становится ниже показанной штриховой горизонтальной линии, которая показывает положение заданного максимального значения замедления.
С момента времени, в который скорость v движения достигает предварительно вычисленного значения vx переходной скорости, то есть во второй фазе Dt2 торможения, ускорение а повышается соответственно заданному значению  толчка и, тем самым, возрастает прямолинейно. Штриховой линией, которая, прежде всего, имеет форму параболы, которая начинается в момент времени предварительно вычисленной переходной скорости vx, показано изменение гипотетического ускорения транспортного средства, которое получается из выходной величины регулятора остановки во время второй фазы Dt2 торможения. Однако по причине ограничения толчка во второй фазе торможения эти значения выходной величины регулятора остановки тормозной системе не выдаются.
толчка и, тем самым, возрастает прямолинейно. Штриховой линией, которая, прежде всего, имеет форму параболы, которая начинается в момент времени предварительно вычисленной переходной скорости vx, показано изменение гипотетического ускорения транспортного средства, которое получается из выходной величины регулятора остановки во время второй фазы Dt2 торможения. Однако по причине ограничения толчка во второй фазе торможения эти значения выходной величины регулятора остановки тормозной системе не выдаются.
Однако к моменту времени перехода от второй фазы Dt2 торможения в третью фазу Dt3 торможения ограничение толчка больше не требуется или больше не является эффективным, и значения выходных величин регулятора остановки определяют дальнейшее изменение во времени ускорения а, которое покидает показанное штриховой линией прямолинейное изменение во времени заданного максимального значения толчка. Изменение во времени ускорения направляется к показанной посредством оси времени нулевой линии, причем может произойти незначительное превышение нулевой линии, пока в конце третьей фазы Dt3 торможения достигается остановка транспортного средства. Значения уклона ускорения а транспортного средства в третьей фазе Dt3 торможения с течением времени становится меньше, то есть толчок уменьшается. Это означает, что происходит очень комфортное для людей в транспортном средстве торможение до остановки.
Показанное над осью времени изменение во времени скорости v движения соответствует изменению во времени ускорения а транспортного средства. В первой фазе Dt1 торможения скорость v движения слегка линейно снижается, вследствие линейного повышения ускорения а во второй фазе Dt2 торможения имеет параболическое изменение во времени, и в третьей фазе Dt3 торможения при очень малых значениях скорости v транспортного средства приближается к нулевой линии.
К моменту остановки транспортного средства может быть активирована механическая система торможения для предотвращения того, что электродинамическая тормозная система с генератором и направленным против предыдущего направления движения тормозным действием приведет к возобновлению движения в противоположном направлении. Затем электродинамическая тормозная система может быть отключена, пока она не будет востребована в более поздней фазе эксплуатации. Благодаря этому механическая тормозная система также несущественно изнашивается из-за трения.

Предложен способ торможения рельсового транспортного средства. Рельсовое транспортное средство содержит управляемую посредством заданного значения (Fout) тормозного действия в виде входной величины тормозную систему (5). Заданное значение (Fout) тормозного действия генерируют и выдают тормозной системе (5) в виде изменяющейся в течение времени (t) величины до тех пор, пока транспортное средство не остановится. В первой фазе (Dt1) торможения заданное значение (Fout) тормозного действия генерируют и выдают в зависимости от запроса (Fin) на торможение. В более поздней фазе торможения, которую выполняют после первой фазы (Dt1) торможения, заданное значение (Fout) тормозного действия генерируют посредством регулятора (13) остановки в виде выходной величины регулятора. Причем к регулятору (13) остановки в виде входной величины регулятора подводят скорость (v) движения рельсового транспортного средства и регулятор (13) остановки регулирует скорость (v) движения рельсового транспортного средства до равного нулю заданного значения. Предложены также устройство для торможения рельсового транспортного средства и рельсовое транспортное средство. Достигается комфортабельное для находящихся в транспортном средстве людей торможение рельсового транспортного средства в короткое время до остановки. 3 н. и 10 з.п. ф-лы, 3 ил.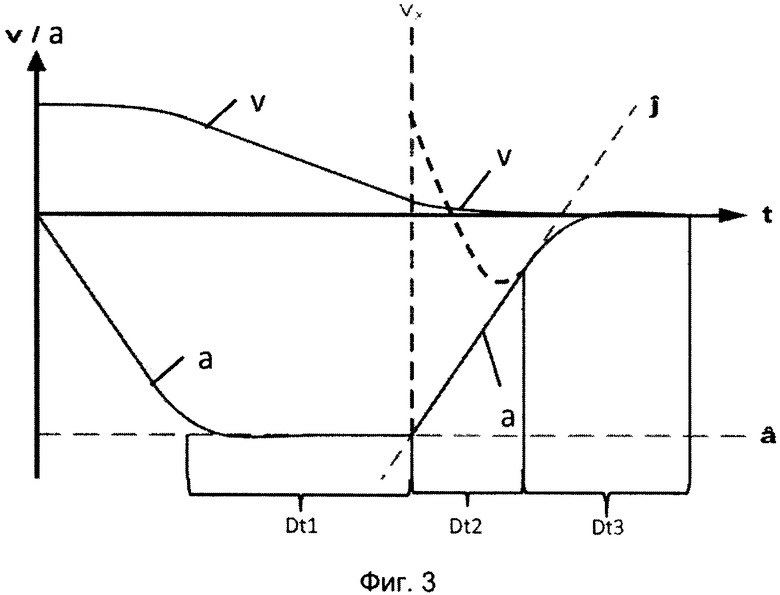
1. Способ торможения рельсового транспортного средства, причем рельсовое транспортное средство имеет управляемую посредством заданного значения (Fout) тормозного действия в виде входной величины тормозную систему (5) и причем заданное значение (Fout) тормозного действия генерируют и выдают тормозной системе (5) в виде изменяющейся в течение времени (t) величины до тех пор, пока транспортное средство не остановится, следующим образом:
- в первой фазе (Dt1) торможения заданное значение (Fout) тормозного действия генерируют и выдают в зависимости от запроса (Fin) на торможение,
- в более поздней фазе торможения, которую выполняют после первой фазы (Dt1) торможения, заданное значение (Fout) тормозного действия генерируют посредством регулятора (13) остановки в виде выходной величины регулятора, причем к регулятору (13) остановки в виде входной величины регулятора подводят скорость (v) движения рельсового транспортного средства и регулятор (13) остановки регулирует скорость (v) движения рельсового транспортного средства до равного нулю заданного значения.
2. Способ по предшествующему пункту, причем в следующей за первой фазой (Dt1) торможения второй фазе (Dt2) торможения автоматически непрерывно уменьшают и выдают величину заданного значения (Fout) тормозного действия, причем уменьшение величины заданного значения (Fout) тормозного действия в течение интервала времени соответствует заданному максимальному значению  толчка и причем более поздняя фаза торможения является третьей фазой (Dt3) торможения, которая следует за второй фазой (Dt2) торможения.
толчка и причем более поздняя фаза торможения является третьей фазой (Dt3) торможения, которая следует за второй фазой (Dt2) торможения.
3. Способ по п. 2, причем вторая фаза (Dt2) торможения начинается в момент времени, в который скорость движения имеет предварительно вычисленное значение (vx) скорости.
4. Способ по п. 3, причем предварительно вычисленное значение (vx) скорости предварительно вычисляют в зависимости от одной из нижеупомянутых величин или в зависимости от комбинации двух или трех из нижеупомянутых величин: сгенерированного заданного значения (Fout) тормозного действия во время первой фазы (Dt1) торможения, заданного максимального значения  замедления, до которого замедление (-а) рельсового транспортного средства ограничено в первой фазе (Dt1) торможения, и заданного максимального значения толчка.
замедления, до которого замедление (-а) рельсового транспортного средства ограничено в первой фазе (Dt1) торможения, и заданного максимального значения толчка.
5. Способ по одному из пп. 2-4, причем регулятор (13) остановки активируют при переходе от первой фазы (Dt1) торможения во вторую фазу (Dt2) торможения и уже во второй фазе (Dt2) торможения генерируют тормозное действие в виде выходной величины регулятора, причем, однако, во второй фазе (Dt2) торможения выдают заданное значение (Fout) тормозного действия, которое соответствует уменьшению величины заданного значения (Fout) тормозного действия за интервал времени согласно заданному максимальному значению толчка.
6. Способ по п. 5, причем регулятор (13) остановки имеет интегральное регулирование, которое при генерировании выходной величины регулятора учитывает интеграл скорости (v) движения по прошедшему с начала второй фазы (Dt2) торможения времени (t).
7. Способ по п. 6, причем интегральному регулированию присваивают отрицательное начальное значение тормозного действия, которое с течением времени (t) в возрастающей степени компенсируют результатом интегрирования.
8. Способ по п. 7, причем отрицательное начальное значение образуют путем изменения знака заданного значения (Fout) тормозного действия, которое выдают к началу второй фазы (Dt2) торможения.
9. Способ по одному из пп. 1-8, причем в первой фазе (Dt1) торможения замедление (-а) рельсового транспортного средства ограничивают до заданного максимального значения замедления.
10. Устройство для торможения рельсового транспортного средства, причем устройство имеет устройство вывода для выдачи заданного значения (Fout) тормозного действия в виде входной величины для управляемой тормозной системы (5) рельсового транспортного средства, причем устройство имеет генерирующий узел (3), прежде всего для осуществления способа по пп. 1-7, для генерирования заданного значения (Fout) тормозного действия в виде изменяющейся с течением времени (t) величины для остановки рельсового транспортного средства и причем генерирующий узел (3) выполнен следующим образом:
- в первой фазе (Dt1) торможения вырабатывается и выдается заданное значение (Fout) тормозного действия в зависимости от запроса (Fin) на торможение,
- в более поздней фазе торможения, которая выполняется после первой фазы (Dt1) торможения, заданное значение (Fout) тормозного действия генерируется регулятором (13) остановки генерирующего узла (3) в виде выходной величины регулятора, причем к регулятору (13) остановки в виде входной величины регулятора подводится скорость (v) движения рельсового транспортного средства, и регулятор (13) остановки регулирует скорость (v) движения до равного нулю заданного значения.
11. Устройство по п. 10, причем генерирующий узел (3) выполнен так, чтобы в следующей за первой фазой (Dt1) торможения второй фазе (Dt2) торможения автоматически непрерывно уменьшать и выдавать величину заданного значения (Fout) тормозного действия, причем уменьшение величины заданного значения (Fout) тормозного действия за интервал времени соответствует заданному максимальному значению толчка и причем более поздняя фаза торможения является третьей фазой (Dt3) торможения, которая следует за второй фазой (Dt2) торможения.
12. Устройство по п. 10 или 11, причем генерирующий узел (3) выполнен для ограничения в первой фазе (Dt1) торможения замедления (-а) рельсового транспортного средства до заданного максимального значения замедления.
13. Рельсовое транспортное средство, имеющее тормозную систему (5), которая является управляемой заданным значением (Fout) тормозного действия, и устройство по одному из пп. 10-12.
| ТОРМОЗНОЙ КОНТРОЛЛЕР | 2009 |
|
RU2516877C2 |
| Устройство автоматического управления реостатным торможением подвижного состава | 1983 |
|
SU1147608A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |

