Область техники
Изобретение относится к транспортной отрасли и предназначено преимущественно для использования в системах управления движением рельсовых транспортных средств.
Уровень техники
Известны способы управления движением рельсового транспортного средства, в которых управляющее ускорение формируется следующим образом [1]. Текущая скорость движения предполагается равной скорости стабильного движения. Для этой скорости рассчитывается время хода состава по перегону, предполагая, что дальнейшая траектория будет состоять из режимов стабилизации, торможения и разгона с учетом всех предстоящих ограничений скорости. Если полученное расчетное время хода оказывается больше времени, оставшегося до прибытия, то осуществляется разгон с максимальной тягой, пока расчетное и оставшееся время до прибытия не сравняются, после чего происходит переход на режим поддержания скорости. Одновременно с регулированием времени хода выполняется контроль ограничений по скорости. Для этого вычисляется тормозной путь, необходимый для сброса скорости до значения предстоящего ограничения. Если расстояние до ограничения становится меньше, чем длина тормозного пути, то осуществляется торможение с максимальной интенсивностью. Когда текущая скорость становится равной значению ограничения, то осуществляется переход к режиму стабилизации скорости. Задача прицельного торможения состава на станции для алгоритмов автоведения, как правило, решается заданием замедления в зависимости от расстояния до станции в соответствии с заранее рассчитанными программными значениями.
Известны также способы нечеткого управления движением подвижного состава [2], которые заключаются в том, что в текущий момент времени для каждого возможного значения управляющего воздействия делается прогноз, какой эффект будет иметь это воздействие в дальнейшем. Ситуация в будущем, вызванная применением управляющего воздействия в настоящем времени, характеризуется лингвистическими переменными. Так как при управлении составом необходимо удовлетворять нескольким целям функционирования: точность остановки, время движения по перегону, комфортабельность для пассажиров, экономия электроэнергии и т.д., то с помощью лингвистических правил дается оценка правильности принятия того или иного управляющего воздействия. С помощью нечеткого вывода выбирается управляющее воздействие, приводящее к наилучшему, в смысле заложенных лингвистических правил, результату. Однако такой способ управления значительно ориентирован на работу с дискретным управлением тягой и торможением, так как необходимо делать прогноз, к какому результату в будущем приведет применение в текущий момент каждого из возможных значений управляющего воздействия. В случае плавного управления тягой и замедлением такой способ оказывается неприемлемым. Кроме того, данный способ не предусматривает управления временем хода.
Таким образом, известен способ управления движением подвижного состава рельсового транспортного средства, принятый за прототип [1], при котором в соответствии с текущими параметрами движения, с использованием операций сравнения, осуществляются переходы между режимами движения: разгон с максимальной интенсивностью, стабилизация скорости движения, торможение с максимальной интенсивностью, прицельное торможение на станции. Однако при использовании этого способа управляющие решения принимаются на основе операций сравнения, результатом которых могут быть два возможных значения: "истина" или "ложь". При этом незначительные изменения параметров движения могут приводить к противоположным управляющим решениям. Это сказывается на качестве процессов управления и приводит к снижению комфортабельности, повышению расхода электроэнергии, снижению ресурса оборудования. Кроме того, данный способ предоставляет ограниченные возможности по настройке системы управления.
Раскрытие изобретения
Целью данного изобретения является обеспечение гибкой настройки системы управления движением, упрощение сопровождения и модернизации управляющей системы, устранение колебательных режимов движения.
Указанная цель достигается тем, что управляющее воздействие формируется нечетким лингвистическим регулятором (НЛР), который осуществляет качественную оценку параметров движения, а затем, в соответствии с полученной оценкой, определяет степень истинности посылок лингвистических правил управления движением. Управляющее воздействие вычисляется по методу нечеткого вывода Такаги-Сугено и учитывает заключения всех правил в зависимости от степеней истинности их посылок. При этом используются параметры движения подвижного состава, а также связанные с ними лингвистические переменные и нечеткие лингвистические правила, рассмотренные ниже.
Параметр движения подвижного состава Δt показывает, на сколько состав отклонится от расписания по времени, если будет стремиться поддерживать текущую скорость V, с учетом предстоящих ограничений скорости. Другими словами, этот параметр позволяет нечеткому регулятору принять решение - надо ли изменять текущую скорость для того, чтобы прибыть вовремя.
Четкое значение параметра определяется по формуле:

где
tost - оставшееся время для движения;
tprogn - оценка времени, которое потребуется составу для проезда перегона. Вычисление значения tprogn осуществляется по известной методике [1].
Связанная с параметром Δt лингвистическая переменная [3, 4] "Отклонение по времени" характеризуется следующими нечеткими переменными: "Опоздание" - соответствует состоянию, когда сохранение текущей скорости приведет к опозданию; "Вовремя" - текущая скорость позволяет прибыть вовремя; "Опережение" - сохранение текущей скорости приведет к прибытию слишком рано. Функции принадлежности (ФП), соответствующие нечетким переменным, приведенным выше, изображены на фиг.1. Значение d1 на фиг.1 - параметр функций принадлежности.
Параметр движения ΔS - расстояние до начала сброса скорости показывает максимальное расстояние, которое может пройти состав, сохраняя текущую скорость, перед очередным ограничением скорости. Поскольку ускорение состава ограничено, то в случае, если поезд приближается к участку пути с максимальной разрешенной скоростью меньшей, чем текущая скорость состава, необходимо снизить скорость заблаговременно. Если за этим участком следует участок с более жестким ограничением, то, возможно, что необходимо начинать торможение в соответствии с ограничениями второго участка, а может быть третьего и т.д. Для всех предстоящих ограничений выполняется оценка минимального расстояния до ограничения, на котором еще можно выполнить торможение:

где
V - текущая скорость;
Vi - значение будущего ограничения скорости;
α3 - значение рекомендуемого замедления.
Далее вычисляется ΔS - расстояние до начала сброса скорости:

где
Si - координата наступления i-го ограничения скорости;
S - текущее положение.
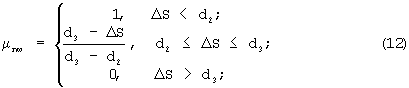
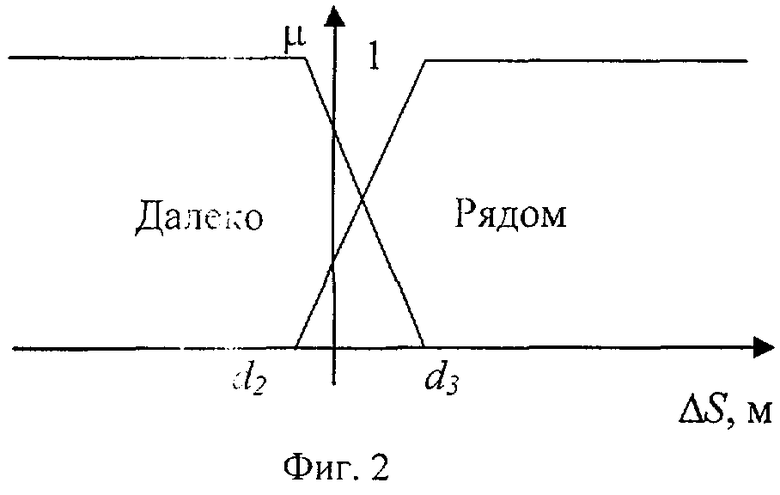
Для параметра движения ΔS вводится лингвистическая переменная "Начало сброса скорости", которая характеризуется следующими нечеткими переменными: "Далеко" - соответствует ситуации, когда начинать торможение рано; "Рядом" - необходимо тормозить. ФП для приведенных выше нечетких переменных изображены на фиг.2. Значения d2 и d3 на фиг.2 - параметры функций принадлежности.
Еще одним параметром движения подвижного состава, является отклонение текущей скорости от максимально допустимой на данном участке:

где
V - текущая скорость;
Vmaxj - ограничение скорости на текущем участке.
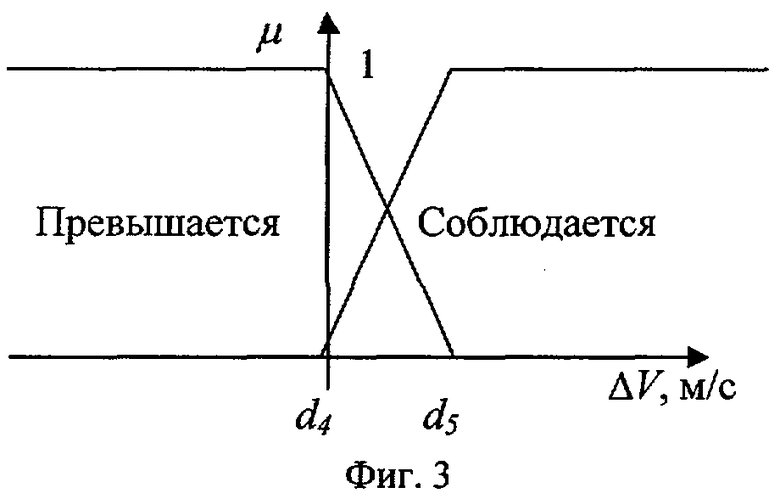
Для параметра ΔV вводится лингвистическая переменная "Ограничение скорости", которая характеризуется следующими нечеткими переменными: "Превышается" - соответствует ситуации, когда происходит превышение скорости; "Соблюдается" - скорость в норме. ФП для приведенных выше нечетких переменных изображены на фиг.3. Значения d4 и d5 на фиг.3 - параметры функций принадлежности.
Параметр движения состава SEnd показывает текущее расстояние до конца перегона. Данный параметр используется для остановки состава на станции.

где L - длина перегона;
S - текущее положение состава.
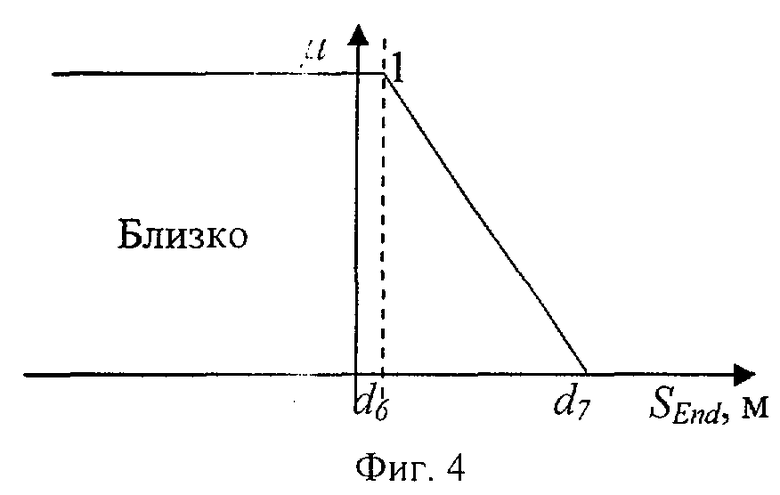
Для параметра SEnd вводится лингвистическая переменная "Конец перегона", которая характеризуется единственной нечеткой переменной "Близко". Вид функции принадлежности соответствующего нечеткого множества приведен на фиг.4.
Параметр движения V - текущая скорость движения состава. Для параметра движения V вводится лингвистическая переменная - "Текущая скорость", характеризуется единственной нечеткой переменной "Вперед". Вид функции принадлежности соответствующего нечеткого множества приведен на фиг.5. Значения d6, d7 и d8 на фиг.4 и фиг.5 - параметры функций принадлежности.
Нечеткий регулятор [5, 6] содержит единственную выходную лингвистическую переменную: "Требуемое ускорение". Нечеткие переменные данной лингвистической переменной реализованы в виде синглтонов (четких значений). Нечеткой переменной "Тормозить" соответствует значение α=-αmax, нечеткой переменной "Сохранять скорость" соответствует α=0 и нечеткой переменной "Ускоряться" α=+αmax, где αmax максимальное допустимое ускорение состава.
Отметим, что для всех нечетких переменных используются функции принадлежности треугольного вида. Данное решение обосновано простотой задания этих функций и минимальными вычислительными затратами на их реализацию. При этом, как показали эксперименты, функции принадлежности треугольного вида обеспечивают хорошее качество управления. Параметры функций принадлежности изначально задаются исходя из смысла соответствующих нечетких переменных. В процессе экспериментов параметры настраиваются таким образом, чтобы обеспечить требуемое качество управления.
Нечеткий регулятор содержит восемь правил, соответствующих способу управления движением подвижного состава, описанному в работе [1]. В терминах лингвистических переменных правила нечеткого регулятора можно записать следующим образом:
1. ЕСЛИ "Отклонение по времени" - "Опоздание" И "Начало сброса скорости" - "Далеко" И "Ограничение скорости" - "Соблюдается" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Ускоряться";
2. ЕСЛИ "Начало сброса скорости" - "Рядом" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Тормозить";
3. ЕСЛИ "Отклонение по времени" - "Вовремя" И "Начало сброса скорости" - "Далеко" И "Ограничение скорости" - "Соблюдается" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Сохранять скорость";
4. ЕСЛИ "Отклонение по времени" - "Опережение" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Тормозить";
5. ЕСЛИ "Ограничение скорости" - "Превышается" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Тормозить";
6. ЕСЛИ "Текущая скорость" - "Вперед" И "Конец перегона" - "Близко", ТО "Требуемое ускорение" - "Тормозить";
7. ЕСЛИ "Текущая скорость" - НЕ "Вперед" И "Конец перегона" - "Близко", ТО "Требуемое ускорение" - "Сохранять скорость";
8. ЕСЛИ "Текущая скорость" - НЕ "Вперед" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Ускоряться";
В качестве операций нечеткого "И" и "ИЛИ" используются операции MIN и МАХ соответственно, операции "НЕ"  . В заключениях правил находятся синглтоны - многочлены первого порядка от входных параметров нечеткого регулятора. Результирующее ускорение вычисляется по формуле Такаги-Сугено [5]:
. В заключениях правил находятся синглтоны - многочлены первого порядка от входных параметров нечеткого регулятора. Результирующее ускорение вычисляется по формуле Такаги-Сугено [5]:
где
rl - степень истинности посылки l-го правила;
ul - синглтон в заключении l-го правила (значение ускорения соответствующее заключению l-го правила).
Для выполнения точной и полной остановки на станции, производятся следующие действия. В массив ограничений скорости вводится дополнительное ограничение <L - Slow, Vlow>, где L - длина перегона. Таким образом, регламентируется, что при приближении к точке останова на расстояние Slow, скорость состава не должна превышать значение Vlow. Тогда на небольшом интервале пути состав медленно приближается к заданной позиции на станции. На малом расстоянии от точки останова в действие вступают правила остановки нечеткого регулятора, которые и выполняют полную остановку состава.
Покажем, что предложенный нечеткий лингвистический регулятор позволяет решать возложенные на него задачи. А именно, нечеткий лингвистический регулятор осуществляет ведение электроподвижного состава по перегону с соблюдением всех ограничений скорости и с точной остановкой состава на станции строго по расписанию.
Проанализируем, каким образом нечеткий лингвистический регулятор решает задачу соблюдения скорости. Предположим, что состав движется по участку с ограничением скорости Vmaxj. Пусть на пути следования нет других ограничений и конец перегона далеко. Пусть соблюдение текущей скорости приведет к опозданию состава на Δt<-d1. Тогда в процессе перехода к качественным характеристикам параметров движения будут получены следующие результаты;
Предположим, что значения, примерно равные 1, действительно равны 1, а значения, примерно равные 0, действительно равны 0. При этом в процессе нечеткого вывода будут участвовать только правила 1 и 5, так как в посылках остальных правил находится хотя бы одно нечеткое высказывание со степенью истинности 0. Степени истинности посылок правил 1 и 5 целиком определяются значениями μn и μu соответственно, так как степени истинности остальных высказываний посылок равны единице.
Запишем, чему равны значения μn и μu, при этом воспользуемся обозначением параметров функций принадлежности:
В соответствии с методом Такаги-Сугено значение ускорения состава будет находиться по формуле:

где αmax равняется значению синглтона нечеткой переменной А (ускоряться), αmin равняется значению синглтона нечеткой переменной В (тормозить).
Рассмотрим управляющее воздействие, при выполнении условия d4≤ΔV≤d5:

Подставим в полученное выражение формулу (4)

Формула (11) представляет собой закон управления на участке с ограничением скорости. Таким образом, можно сделать вывод, что при движении на участке с ограничением нечеткий регулятор представляет собой пропорциональный закон управления с коэффициентом  . Уставкой для пропорционального регулятора является значение
. Уставкой для пропорционального регулятора является значение  . Следовательно, для того чтобы получить требуемое качество управления при движении состава на участке с ограничением скорости, необходимо настраивать параметры d4 и d5. При этом их разность определяет интенсивность управления, а среднее арифметическое - запас установившегося значения скорости до ограничения.
. Следовательно, для того чтобы получить требуемое качество управления при движении состава на участке с ограничением скорости, необходимо настраивать параметры d4 и d5. При этом их разность определяет интенсивность управления, а среднее арифметическое - запас установившегося значения скорости до ограничения.
Проанализируем работу нечеткого лингвистического регулятора в случае, когда впереди состава находится участок ограничения скорости, требующий подтормаживания. Пусть текущая скорость далека от ограничения и конец перегона далеко. Пусть подтормаживание для соблюдения предстоящего ограничения скорости приводит к опозданию состава. Тогда в процессе перехода к качественным характеристикам параметров движения будут получены следующие результаты:
Предположим, что значения, примерно равные 1, действительно равны 1, а значения, примерно равные 0, действительно равны 0. Тогда в процессе нечеткого вывода будут участвовать правила 1 и 4. При этом степени истинности посылок правил определяются значениями μnw и μw. Рассмотрим значения μnw и μw:

В соответствии с методом Такаги-Сугено значение ускорения состава будет находиться по формуле:

Рассмотрим управляющее воздействие при выполнении условия d2≤ΔS≤d3:

Подставим в выражение (14) формулы (2) и (3):

Введем функцию, регламентирующую скорость состава на подъезде к ограничению в зависимости от расстояния до ограничения:

Функция V3(S) соответствует торможению с рекомендуемым замедлением, которое должно быть меньше по модулю максимально допустимого. С учетом формулы (17) преобразуем выражение (16):

Формула (18) представляет собой закон управления перед участком с ограничением скорости. Таким образом, при подъезде к участку с ограничением нечеткий лингвистический регулятор выступает в роли пропорционального регулятора, уставкой для которого служит значение  . Можно сказать, что нечеткий регулятор стремится привести скорость в соответствие программному значению V3(S), которое зависит от расстояния до ограничения. При этом разность параметров d3 и d2 определяет интенсивность управления, а их сумма влияет на запас регулирования по скорости.
. Можно сказать, что нечеткий регулятор стремится привести скорость в соответствие программному значению V3(S), которое зависит от расстояния до ограничения. При этом разность параметров d3 и d2 определяет интенсивность управления, а их сумма влияет на запас регулирования по скорости.
Рассмотрим, как происходит работа регулятора при выполнении прицельного торможения на станции. Отметим, что на начальных этапах прицельного торможения в формировании управляющего воздействия будут участвовать не только правила, отвечающие за торможение на станции, но и, например, правила, ограничивающие скорость состава или регулирующие время прибытия. Тем не менее, по мере приближения к точке останова и снижения скорости, основная роль в формировании управляющего воздействия перейдет к правилам 6, 7, 8.
Степени истинности правил 6, 7, 8 определяются степенями принадлежности μc и μf входов SEnd и V к нечетким переменным "Конец перегона" и "Вперед" соответственно. Рассмотрим эти степени принадлежности в различных ситуациях.


В соответствии с нечетким выводом по Такаги-Сугено и правилами нечеткого регулятора значение управляющего ускорения будет находиться по формуле:

Рассмотрим значение управляющего воздействия для различных значений SEnd. При SEnd≥d7, управление осуществляется в соответствии с правилами 1, 2, 3, 4 и 5, либо, если скорость оказывается недопустимо низкой, в действие вступает правило 8, требующее ускорение состава.
В случае, если SEnd≤d6, значение управляющего воздействия находится по формуле:

Таким образом, при SEnd≤d6 нечеткий лингвистический регулятор представляет собой пропорциональный регулятор скорости движения, уставкой для которого является значение 0 м/с, а коэффициентом регулятора является выражение  . Следовательно, если при подъезде к станции на расстояние ближе чем d6, состав продолжает двигаться вперед, то нечеткий регулятор плавно снижает скорость до 0 м/с, при этом интенсивность замедления определяется значением параметра d8.
. Следовательно, если при подъезде к станции на расстояние ближе чем d6, состав продолжает двигаться вперед, то нечеткий регулятор плавно снижает скорость до 0 м/с, при этом интенсивность замедления определяется значением параметра d8.
Наиболее интересной является ситуация, когда d6<SEnd<d7. В этом случае управляющее ускорение будет находиться по формуле:

Рассмотрим выражение (23) при 0<V<d8:
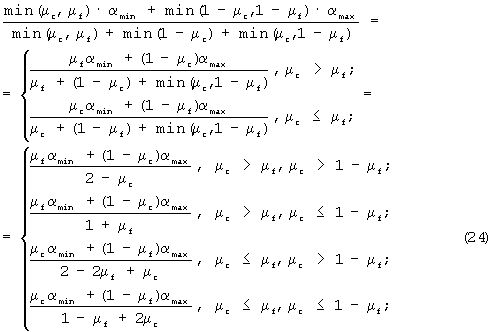
Подставим в первое выражение системы (24) значения из формул (19) и (20):

Введем обозначение:

Тогда выражение (25) примет вид:

Аналогичным образом рассмотрим остальные выражения системы (24):



Таким образом, управляющее ускорение состава в случае, когда d6<SEnd<d7 и 0<V<d8, находится по формуле:

Выражение (31) представляет собой нелинейный закон управления, в котором управляющее воздействие вычисляется на основе разности (V3(SEnd)-V). Таким образом, нечеткий лингвистический регулятор выступает в роли нелинейного регулятора, который стремится привести скорость состава к уставке V3(SEnd). Это означает, что при движении на интервале [L-d7, L-d6] нечеткий лингвистический регулятор будет стремиться менять скорость состава от значения d8 до 0 м/с. Отметим также, что от параметра d8 зависит интенсивность управления, так как он входит в знаменатель коэффициента усиления выражений (22) и (31). С другой стороны, по формуле (26), чем меньше выбран параметр d8, тем медленней состав будет приближаться к точке останова и тем больше потери времени на торможение.
Рассмотрим, каким образом нечеткий лингвистический регулятор позволяет решать задачу регулирования времени хода по перегону. Пусть состав движется по участку без ограничений скорости, кроме того, по ходу следования нет ограничений. Пусть до следующей остановки еще далеко. Тогда в процессе перехода к качественным характеристикам параметров движения будут получены следующие значения:
Степени истинности μl, μ0, μe определяются по формулам:
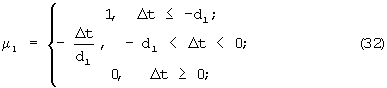
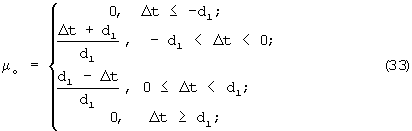

Используя выражения (32), (33), (34) и правила нечеткого регулятора, можно записать результат дефаззификации по Такаги-Сугено:

Система (35) представляет собой пропорциональный регулятор. Коэффициент усиления обратно пропорционален параметру d1. Таким образом, выбирая параметр d1, можно обеспечить требуемое качество управления временем движения.
Представленные результаты исследования подтверждают работоспособность способа нечеткого управления движением подвижного состава рельсового транспортного средства с возможностью плавного управления тягой. Согласно аналитическим рассуждениям предложенный нечеткий регулятор решает поставленные задачи управления: за заданное время перемещает состав по перегону, соблюдая все ограничения в пути и обеспечивает прицельное торможение состава на станции. Для обеспечения нужного качества управления необходимо настраивать параметры d1-d8 и α3. Параметр d1 позволяет настраивать интенсивность регулирования времени хода. Параметры d2, d3 и α3 позволяют настраивать поведение системы при подтормаживании перед ограничением скорости. Параметр α3 определяет рекомендуемую скорость состава в зависимости от расстояния до предстоящего ограничения. Разность параметров d3 и d2 определяет интенсивность регулирования скорости, а их сумма влияет на запас регулирования. Параметры d4 и d5 влияют на качество регулирования скорости на участках с ограничением. При этом их разность определяет интенсивность регулирования скорости, а среднее арифметическое - запас установившегося значения скорости до ограничения. Параметры d6, d7 и d8 позволяют настраивать управление прицельным торможением. Фактически они задают программную скорость, зависящую от текущего положения состава, которая снижается от значения d8 в точке L-d7 до 0 м/с в точке L-d6, где L - длина перегона. Кроме того, параметр d8 позволяет настраивать интенсивность регулирования скорости.
Осуществление изобретения
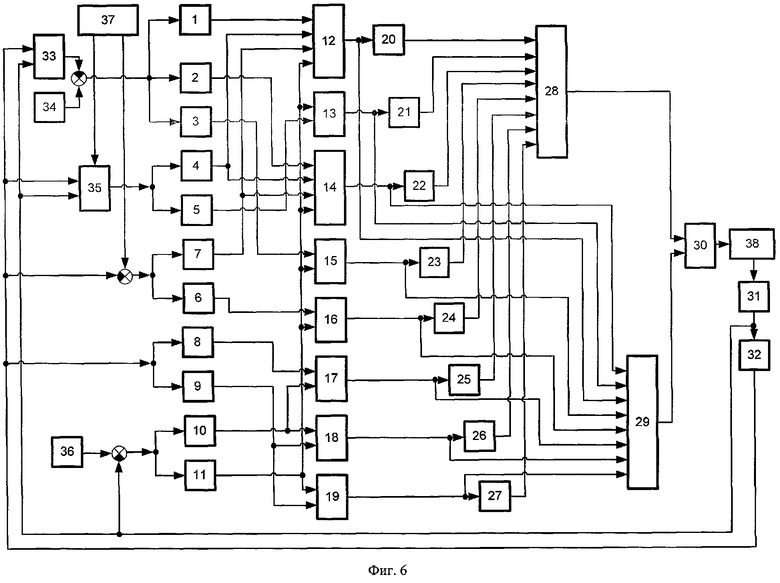
На фиг.6 представлено устройство, реализующее данный способ. Оно включает нечеткий лингвистический регулятор блоки 1-30, где 1-11 нелинейные элементы, реализующие функции принадлежности нечетких переменных: "Опоздание" 1, "Вовремя" 2, "Опережение" 3, "Далеко" 4, "Рядом" 5, "Превышается" 6, "Соблюдается" 7, "Вперед" 8, НЕ "Вперед" 9, "Близко" 10, НЕ "Близко" 11; блоки вычисления минимума 12-19; блоки усиления 20-27, коэффициенты усиления которых равны значениям ускорения в заключениях правил нечеткого регулятора: αmax 20, - αmax 21, 0 22, - αmax 23, - αmax 24, - αmax 25, 0 26, αmax 27; блоки суммирования 28 и 29; блок деления 30; датчик пройденного пути 31; устройство вычисления скорости движения 32; блок прогноза времени в пути 33; таймер 34; блок прогноза начала торможения перед ограничением скорости 35; задание длины перегона 36; диаграмма ограничений скорости 37, электроподвижной состав 38. При этом выход датчика пройденного пути 31 соединяется со входом устройства вычисления скорости движения 32, а также со входом блока прогноза времени в пути 33 и входом блока прогноза начала торможения перед ограничением скорости 35. Кроме того, выход блока 31 вычитается из задания длины перегона 36. Выход блока вычисления разности соединен со входами нелинейных элементов 10 и 11. Выход устройства вычисления скорости движения 32 соединяется со входом блока прогноза времени в пути 33 и входом блока прогноза начала торможения перед ограничением скорости 35, а также со входами нелинейных элементов 8 и 9. Кроме того, выход устройства вычисления скорости движения вычитается из значения текущего ограничения скорости - выхода диаграммы ограничений скорости 37. Выход блока вычисления разности соединен со входами нелинейных элементов 7 и 6. Выходы диаграммы ограничений скорости 37 соединены со входом блока прогноза времени в пути 33 и входом блока прогноза начала торможения перед ограничением скорости 35. Выход блока прогноза времени в пути 33 вычитается из выхода таймера 34. Выход блока вычисления разности подключен ко входам нелинейных элементов 1, 2 и 3. Выход блока прогноза начала торможения перед ограничением скорости 35 соединен со входами нелинейных элементов 4 и 5. Выход нелинейного элемента 1 соединен со входом блока взятия минимума 12. Выход нелинейного элемента 2 соединен со входом блока взятия минимума 14. Выход нелинейного элемента 3 соединен со входом блока взятия минимума 15. Выход нелинейного элемента 4 соединен со входом блока взятия минимума 12 и со входом блока взятия минимума 14. Выход нелинейного элемента 5 соединен со входом блока взятия минимума 13. Выход нелинейного элемента 7 соединен со входом блока взятия минимума 12 и со входом блока взятия минимума 14. Выход нелинейного элемента 6 соединен со входом блока взятия минимума 16. Выход нелинейного элемента 8 соединен со входом блока взятия минимума 17. Выход нелинейного элемента 9 соединен со входом блока взятия минимума 18 и со входом блока взятия минимума 19. Выход нелинейного элемента 10 соединен со входом блока взятия минимума 17 и со входом блока взятия минимума 18. Выход нелинейного элемента 11 соединен со входами блоков взятия минимума 12-16, 19. Выходы блоков взятия минимума 12-19 соединены со входами блока суммирования 29. Кроме того, выход блока взятия минимума 12 соединен с блоком усиления 20, выход блока взятия минимума 13 соединен с блоком усиления 21, выход блока взятия минимума 14 соединен с блоком усиления 22, выход блока взятия минимума 15 соединен с блоком усиления 23, выход блока взятия минимума 16 соединен с блоком усиления 24, выход блока взятия минимума 17 соединен с блоком усиления 25, выход блока взятия минимума 18 соединен с блоком усиления 26, выход блока взятия минимума 19 соединен с блоком усиления 27. Выходы блоков суммирования 28 и 29 соединены со входами блока деления 30. Выход блока деления соединен со входом исполнительного механизма электроподвижного состава 38.
Устройство работает следующим образом. Датчик пройденного пути 31 определяет путь, пройденный составом с момента отправления со станции. По изменению пройденного пути во времени устройство 32 вычисляет скорость движения подвижного состава. На основе известной скорости движения, величины пройденного пути и информации о предстоящих ограничениях скорости формируются входы нечеткого регулятора. Для этого с помощью известных методик [1] прогнозируется время прибытия на станцию при стремлении поддерживать текущую скорость - блок 22. Результат прогноза вычитается из времени, которое осталось до прибытия состава вовремя. Результат этой операции является входом Δt нечеткого лингвистического регулятора. С использованием формул (2), (3) в блоке 35 определяется расстояние, которое осталось до точки начала торможения перед очередным ограничением скорости. Данная величина является входом ΔS нечеткого регулятора. Текущая скорость движения состава вычитается из значения текущего ограничения скорости - выхода диаграммы ограничений скорости 37. Полученная величина является входом ΔV нечеткого регулятора. Пройденный составом путь вычитается из общей длины перегона. Полученная величина является входом SEnd нечеткого регулятора. Текущая скорость состава является входом V нечеткого регулятора. Полученные входы нечеткого регулятора поступают на нелинейные элементы 1-11, которые реализуют процедуру фаззификации. Выход каждого нелинейного элемента равен степени принадлежности текущего входа регулятора к соответствующему нечеткому множеству. Выходы нелинейных элементов подаются на блоки взятия минимума 12-19, которые реализуют вычисление степени истинности каждого из восьми лингвистических правил нечеткого регулятора. Связи между нелинейными элементами и блоком взятия минимума определяются вхождением нечетких переменных в правило, соответствующее данному блоку взятия минимума. Блоки 20-30 реализуют нечеткий вывод по Такаги-Сугено (6). При этом блоки 20-28 используются для определения взвешенной суммы заключений правил, где весовыми коэффициентами являются степени истинности посылок правил. Блок суммирования 29 определяет нормирующий коэффициент - сумму степеней истинности посылок правил. В блоке 30 находится нормированная взвешенная сумма заключений правил путем деления выхода блока 28 на выход блока 29. Выход блока 30 является искомым значением управляющего ускорения, которое подается на исполнительные механизмы электроподвижного состава.
Преимуществом способа нечеткого управления движением подвижного состава рельсового транспортного средства с возможностью плавного управления тягой является то, что система управления естественно и компактно описывается восемью правилами и одиннадцатью нечеткими переменными. Для настройки функций принадлежности нечетких переменных и всего нечеткого регулятора используется восемь параметров, которые позволяют задать не только коэффициенты усиления "эквивалентных" регуляторов, но и запас регулирования. Кроме того, использование графического представления функций принадлежности позволяет сделать настройку параметров регулятора наглядной и интуитивно понятной процедурой. Нечеткий регулятор обеспечивает плавные переходы между режимами движения подвижного состава, что позволяет устранить колебательные процессы.
Источники информации
1. Л.А.Баранов, Я.М.Головичер, Е.В.Ерофеев, В.М.Максимов, Микропроцессорные системы автоведения электроподвижного состава // Под ред. Л.А.Баранова. - М.: Транспорт, 1990. - С.272.
2. Прикладные нечеткие системы // Под ред. Т.Тэрано, К.Асаи, М.Сугэно. - М.: Мир 1993.
3. L.A.Zadeh. Outline of a new approach to the analysis of the complex systems and decision processes // IEEE Trans. Systems Man Cybernet. SMC-3 (1) (1973) 28-44.
4. Заде Л.А. Понятие лингвистической переменной и его применение к принятию приближенных решений. - М.: Мир, 1976.
5. Кофман А. Введение в теорию нечетких множеств: Пер. с франц. - М.: Радио и связь, 1982. - С.432.
6. M.Sugeno, T.Takagi Multidimentional fuzzy reasoning // Fuzzy Sets and Systems 9 (1983).

Изобретение относится к области транспорта и предназначено преимущественно для использования в системах управления движением рельсовых транспортных средств. Способ включает измерение пройденного пути, текущей скорости и времени, прошедшего с момента отправления со станции. Осуществляются также прогнозирование времени прибытия при условии поддержания текущей скорости и вычисление пути, которое пройдет состав, прежде чем сбросит скорость до значения предстоящего ограничения. На основе измерений и прогнозирования определяют ожидаемое отклонение по времени от расписания, расстояние до начала сброса скорости перед очередным ограничением скорости, текущее превышение скорости, расстояние до конца перегона. С использованием нелинейных элементов формируют нечеткую оценку параметров движения состава, выраженную термами лингвистических переменных. Данная оценка используется для получения степени истинности посылок лингвистических правил управления подвижным составом. Расчет ускорения состава производится с помощью процедуры нечеткого вывода, которая учитывает заключение каждого правила в зависимости от степени истинности его посылки. За счет введения нелинейных элементов обеспечивается плавное изменение режимов движения, а параметры нелинейных элементов предопределяют возможность гибкой настройки системы управления. В результате имеют место упрощение сопровождения и модернизации управляющей системы, а также устранение колебательных режимов движения. 6 ил., 2 табл.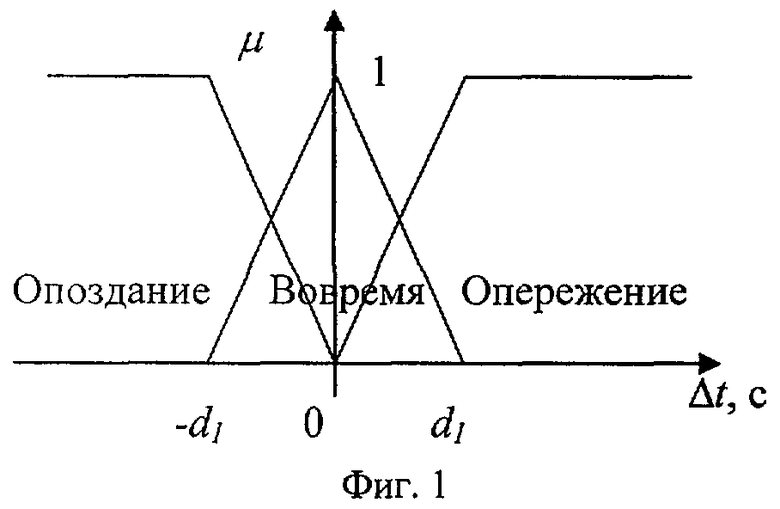
Способ нечеткого управления движением подвижного состава рельсового транспортного средства с возможностью плавного управления тягой, при котором измеряют пройденный путь, текущую скорость и время в пути, а также прогнозируют время прибытия при условии поддержания текущей скорости и вычисляют путь, который пройдет подвижной состав, прежде чем сбросит скорость до значения предстоящего ограничения, при этом на основе измерений и прогнозирования определяют ожидаемое отклонение по времени от расписания, расстояние до начала сброса скорости перед ограничением, текущее отклонение скорости от максимально допустимой и текущее расстояние до конца перегона, отличающийся тем, что посредством нелинейных элементов, характеристики которых изображены на фиг.1-5, формируют нечеткую оценку параметров движения подвижного состава, выраженную термами входных лингвистических переменных:
"Отклонение по времени" - "Опоздание", "Вовремя" и "Опережение",
"Начало сброса скорости" - "Далеко", "Рядом",
"Ограничение скорости" - "Превышается", "Соблюдается",
"Конец перегона" - "Близко", НЕ "Близко",
"Текущая скорость" - "Вперед", НЕ "Вперед",
с использованием данной оценки определяют и задают подвижному составу требуемое ускорение α путем выявления степени истинности посылок следующих лингвистических правил управления подвижным составом:
ЕСЛИ "Отклонение по времени" - "Опоздание" И "Начало сброса скорости" - "Далеко" И "Ограничение скорости" - "Соблюдается" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Ускоряться",
ЕСЛИ "Начало сброса скорости" - "Рядом" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Тормозить",
ЕСЛИ "Отклонение по времени" - "Вовремя" И "Начало сброса скорости" - "Далеко" И "Ограничение скорости" - "Соблюдается" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Сохранять скорость",
ЕСЛИ "Отклонение по времени" - "Опережение" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Тормозить",
ЕСЛИ "Ограничение скорости" - "Превышается" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Тормозить",
ЕСЛИ "Текущая скорость" - "Вперед" И "Конец перегона" - "Близко", ТО "Требуемое ускорение" - "Тормозить",
ЕСЛИ "Текущая скорость" - НЕ "Вперед" И "Конец перегона" - "Близко", ТО "Требуемое ускорение" - "Сохранять скорость".
ЕСЛИ "Текущая скорость" - НЕ "Вперед" И "Конец перегона" - НЕ "Близко", ТО "Требуемое ускорение" - "Ускоряться",
нечеткие переменные выходной лингвистической переменной - "Требуемое ускорение" реализуют в виде синглтонов -α=-αmax ("Тормозить"), α=0 ("Сохранять скорость") и α=+αmax ("Ускоряться"), где αmax - максимально допустимое ускорение состава, а расчет требуемого ускорения подвижного состава осуществляют по выражению

где rl - степень истинности посылки l-го правила;
ul - синглтон (значение ускорения), соответствующий заключению l-го правила.
| БАРАНОВ Л.А | |||
| и др | |||
| Микропроцессорные системы автоведения электроподвижного состава | |||
| Под ред | |||
| Л.А.Баранова, М., Транспорт, 1990, с.272 | |||
| Стыковое соединение сборных объемных блоков | 1978 |
|
SU791870A1 |
| DE 4302574 A1, 04.08.1994 | |||
| DE 4315948 А1, 17.11.1994 | |||
| МНОГОПОРОГОВОЕ УСТРОЙСТВО | 2000 |
|
RU2181926C2 |

