ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к магнитно-резонансной томографии, в частности, к распределению изображений в группы, которые характеризуют движение.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Основной клинической целью четырехмерной магнитно-резонансной томографии (4D-МРТ) является определение границ лечения для внешней лучевой терапии. Обычно, способы сбора 4D-МРТ данных основаны на использовании сигналов датчиков, характеризующих состояние/фазу движения, подлежащего разрешению. Например, при 4D-МРТ органов дыхания применяют дыхательный пояс или навигаторы на основе МРТ, чтобы обнаруживать требуемое состояние движения и включать сбор данных.
Однако, в частности, в абдоминальной области, движение может состоять из периодических и единичных движений, а соответствующее пространство движений, которое следует охватывать, менее известно априорно, например, в некоторых областях перистальтическое движение может превосходить дыхательное движение (например, чашевидной полости), а в других областях дыхательное движение будет преобладающим (например, в верхнем отделе брюшной полости). Как следствие, использование одного датчика движения часто недостаточно для планирования лечения, поскольку желательно более полное измерение статистических данных о движении. Дополнительным недостатком классической 4D-МРТ является значительное снижение эффективности сканирования к концу сканирования и получающаяся биологическая обратная связь.
Опубликованная патентная заявка США US 2012/0281897 A1 раскрывает способ для ослабления в изображении обусловленных движением артефактов визуализации, который включает в себя получение набора данных изображения исследуемой области, формирование множества промежуточных изображений с использованием набора данных изображения, применение метода многофакторного анализа данных к упомянутому множеству промежуточных изображений, чтобы сформировать информацию о движении, сортировка промежуточных изображений в множество бинов на основании информации о движении и формирование изображения исследуемой области с использованием по меньшей мере одного из упомянутого множества бинов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает систему магнитно-резонансной томографии, компьютерный программный продукт и способ в независимых пунктах формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Как будет очевидно специалисту в области техники, аспекты настоящего изобретения могут быть осуществлены в форме устройства, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.п.) или варианта осуществления, сочетающего аспекты программного и аппаратного обеспечения, которые могут быть все названы, в общем, «схемой», «модулем» или «системой». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, осуществленного на одной или более машиночитаемых носителей, содержащих исполняемый компьютером код, реализованный на них.
Может быть использовано любое сочетание одного или более машиночитаемых носителей. Машиночитаемый носитель может быть машиночитаемым носителем сигнала или машиночитаемым носителем данных. Термин «машиночитаемый носитель данных» в контексте настоящего описания охватывает любой материальный носитель данных, который может хранить команды, которые являются исполняемыми процессором компьютерного устройства. Машиночитаемый носитель данных может называться машиночитаемым невременным носителем данных. Машиночитаемый носитель данных может также называться материальным машиночитаемым носителем. В некоторых вариантах осуществления машиночитаемый носитель данных может быть также способен хранить данные, которые могут выбираться процессором компьютерного устройства. Примеры машиночитаемых носителей данных включают в себя, но без ограничения: гибкий диск, накопитель на жестком магнитном диске, твердотельный жесткий диск, флэш-память, USB-флэш-накопитель, оперативную память (RAM), постоянную память (ROM), оптический диск, магнито-оптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например, CD-ROM, CD-RW, CD-R, DVD (DVD-ROM), DVD-RW или DVD-R. Термин машиночитаемый носитель данных относится также к носителям для записи различных типов, допускающим выборку компьютерным устройством по сети или линии связи. Например, данные могут вызываться по модему, по сети Интернет или по локальной сети. Исполняемый компьютером код, реализованный на машиночитаемом носителе, может передаваться с использованием любой подходящей среды, включая, но без ограничения, беспроводную, проводную линию, волоконно-оптический кабель, радиочастоту (РЧ) и т.п. или любое подходящее сочетание вышеописанных сред.
Машиночитаемый носитель сигналов может включать в себя распространяющийся информационный сигнал с исполняемым компьютером кодом, реализованным в сигнале, например, в основной полосе частот или в составе несущей волны. Упомянутый распространяющийся сигнал может быть в любой из множества различных форм, включая, но без ограничения, электромагнитный сигнал, оптический сигнал или любое подходящее сочетание сигналов. Машиночитаемый носитель сигнала может быть любым машиночитаемым носителем, который не является машиночитаемым носителем данных, и который может передавать, распространять или транспортировать программу для использования в связи с системой, комплексом или устройством для исполнения команд.
«Компьютерная память» или «память» является примером машиночитаемого носителя данных. Компьютерная память является любой памятью, которая прямо доступна процессору. «Компьютерное запоминающее устройство» или «запоминающее устройство» является дополнительным примером машиночитаемого носителя данных. Компьютерное запоминающее устройство является любым энергонезависимым машиночитаемым носителем данных. В некоторых вариантах осуществления компьютерное запоминающее устройство может быть также компьютерной памятью или наоборот.
Термин «процессор» в контексте настоящего описания означает электронный компонент, который может исполнять программу или машиноисполняемую команду, или исполняемый компьютером код. Ссылки на компьютерное устройство, содержащее «процессор», следует интерпретировать как, возможно, содержащее два или более процессоров или процессорных ядер. Процессор может быть, например, многоядерным процессором. Термин процессор может также относиться к группе процессоров, входящих в одну компьютерную систему или распределенных по нескольким компьютерным системам. Термин компьютерное устройство следует также интерпретировать как, возможно, относящийся к группе или сети компьютерных устройств, содержащих, каждое, процессор или процессоры. Исполняемый компьютером код может исполняться несколькими процессорами, которые могут находиться в одном компьютерном устройстве, или которые могут быть даже распределены по нескольким компьютерным устройствам.
Исполняемый компьютером код может содержать машиноисполняемые команды или программу, которая заставляет процессор исполнять аспект настоящего изобретения. Исполняемый компьютером код для выполнения операций для аспектов настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, например, Java, Smalltalk, C++ или подобный язык и обычные процедурные языки программирования, например, язык программирования «C» или аналогичные языки программирования, и компилирован в машиноисполняемые команды. В некоторых случаях исполняемый компьютером код может быть в форме высокоуровневого языка или в предварительно компилированной форме и может применяться в связи с интерпретатором, который оперативно формирует машиноисполняемые команды.
Исполняемый компьютером код может исполняться целиком и полностью на компьютере пользователя, частично на компьютере пользователя, как независимый пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или целиком и полностью на удаленном компьютере или сервере. В последнем сценарии, удаленный компьютер может быть соединен с компьютером пользователя по сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или соединение может быть выполнено с внешним компьютером (например, по сети Интернет с использованием провайдера Интернет-сервисов).
Аспекты настоящего изобретения описаны со ссылкой на блок-схемы последовательностей операций и/или блок-схемы способов, аппаратов (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Понятно, что каждый блок или участок блоков блок-схемы последовательности операций, изображений и/или блок-схем может быть реализован командами компьютерной программы в форме исполняемого компьютером в подходящем случае. Кроме того, понятно, что, при отсутствии взаимного исключения, можно объединять сочетания блоков на разных блок-схемах последовательностей операций, изображений и/или блок-схем. Упомянутые команды компьютерных программ могут подаваться в процессор универсального компьютера, специального компьютера или других программируемых устройств обработки данных для получения такой машины, чтобы команды, при исполнении процессором компьютера или других программируемых устройств обработки данных, формировали средство для реализации функций/операций, установленных в блоке или блоках блок-схемы последовательностей операций и/или блок-схемы.
Упомянутые команды компьютерной программы могут также храниться на машиночитаемом носителе, который может руководить работой компьютера, другого программируемого устройства обработки данных или других устройств конкретным образом, чтобы команды, хранящиеся на машиночитаемом носителе формировали изделие, включающее в себя команды, которые функцию/операцию, установленную в блоке или блоках блок-схемы последовательностей операций и/или блок-схемы.
Команды компьютерной программы могут также загружаться в компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы задавать выполнение последовательности операционных этапов в компьютере, другом программируемом устройстве обработки данных или другом устройстве для получения компьютерно-реализуемой процедуры таким образом, чтобы команды, которые исполняются в компьютере или другом программируемом устройстве, обеспечивали процедуры для реализации функций/операций, установленные в блоке или блоках блок-схемы последовательностей операций и/или блок-схемы.
«Интерфейс пользователя» в контексте настоящего описания является интерфейсом, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Интерфейс пользователя» можно также называть «человеко-машинным интерфейсом». Интерфейс пользователя может представлять информацию или данные оператору и/или принимать информацию или данные от оператора. Интерфейс пользователя может предоставлять возможность приема компьютером входных данных от оператора и может предоставлять пользователю выходные данные из компьютера. Другими словами, интерфейс пользователя может позволять оператору управлять или манипулировать компьютером, и интерфейс может давать компьютеру возможность показывать результаты управления или манипулирования оператором. Отображение в виде карты данных или информации на дисплее или графическом интерфейсе пользователя является примером предоставления информации оператору. Прием данных осуществляется посредством клавиатуры, мыши, трекбола, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, игровой панели, веб-камеры, головной гарнитуры, педалей, проводной перчатки, дистанционного пульта управления и акселерометра, которые являются примерами компонентов интерфейса пользователя, которые позволяют принимать информацию или данные от оператора.
«Аппаратный интерфейс» в контексте настоящего изобретения означает интерфейс, который дает возможность процессору компьютерной системы взаимодействовать с внешним компьютерным устройством и/или комплексом и/или управлять им. Аппаратный интерфейс может давать возможность процессору передавать управляющие сигналы или команды во внешнее компьютерное устройство и/или комплекс. Аппаратный интерфейс может также давать возможность процессору обмениваться данными с внешним компьютерным устройством и/или комплексом. Примеры аппаратного интерфейса включают в себя, но без ограничения: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, соединение по беспроводной локальной сети, TCP/IP-соединение, соединение Ethernet, интерфейс управляющего напряжения, MIDI-интерфейс (цифровой интерфейс музыкальных инструментов), аналоговый входной интерфейс и цифровой входной интерфейс.
«Дисплей» или «устройство отображения» в контексте настоящего описания означает устройство вывода или интерфейс пользователя, предназначенный для отображения изображений или данных. Дисплей может выводить визуальные, аудио и/или тактильные данные. Примеры дисплея включают в себя, но без ограничения: компьютерный монитор, телевизионный экран, тактильный электронный дисплей, экран Брайля, электроннолучевую трубку (ЭЛТ), запоминающую электроннолучевую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный флюоресцентный дисплей (ВФД), дисплеи на светоизлучающих диодах (СД), электролюминесцентный дисплей (ЭЛД), плазменные дисплейные панели (ПДП), жидкокристаллический дисплей (ЖК-дисплей), дисплеи на органических светоизлучающих диодах (ОСД), проектор и нашлемный дисплей.
Магнитно-резонансные (МР) данные по определению в настоящем описании являются результатами измерений радиочастотных сигналов, испускаемых атомными спинами, записанными с использованием антенны магнитно-резонансного устройства во время магнитно-резонансного сканирования. Магнитно-резонансные данные являются примером данных медицинского изображения. Изображение магнитно-резонансной томографии (МРТ-изображение) определяется в настоящем описании как реконструированная двух- или трехмерная визуализация анатомических данных, содержащихся в МРТ-данных. Такая визуализация может выполняться с помощью компьютера.
В одном аспекте изобретение обеспечивает систему магнитно-резонансной томографии для сбора магнитно-резонансных данных от субъекта. Система магнитно-резонансной томографии содержит память для хранения машиноисполняемых команд и команд импульсной последовательности. Команды импульсной последовательности заставляют систему магнитно-резонансной томографии собирать магнитно-резонансные данные в соответствии с протоколом магнитно-резонансной томографии. Система магнитно-резонансной томографии дополнительно содержит процессор для управления системой магнитно-резонансной томографии. Исполнение машиноисполняемых команд заставляет процессор собирать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности. Исполнение машиноисполняемых команд дополнительно заставляет процессор реконструировать одно или более первых изображений из первых магнитно-резонансных данных. Исполнение машиноисполняемых команд дополнительно заставляет процессор распределять одно или более первых изображений в первую группу памяти из набора групп памяти.
Исполнение машиноисполняемых команд заставляет процессор многократно повторно собирать последующие магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно реконструировать одно или более последующих изображений из последующих магнитно-резонансных данных. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно вычислять оценку расстояния между одним или более последовательными изображениями и каждой из упомянутого набора групп памяти. Термин «оценка расстояния» можно также представить термином «дистанционная метрика». Оценка расстояния может также относиться к тому, что известно как критерий или метрика подобия. Исполнение машиноисполняемых команд дополнительно заставляет процессору распределять одно или более последующих изображений в выбранную группу памяти, если оценка расстояния между выбранной группой и одним или более последующими изображениями находится в пределах предварительно заданного диапазона. Выбранная группа памяти является существующей группой памяти.
Каждая из групп памяти может иметь предварительно заданный диапазон значений, которые распределяются данной группе или устанавливаются из нее. Если оценка расстояния для одного или более последующих изображений находится в пределах предварительно заданного диапазона для выбранной группы памяти, то одно или более последующих изображений распределяются в данную выбранную группу памяти. Выбранная группа памяти является одной из упомянутого набора групп памяти. Исполнение машиноисполняемых команд дополнительно заставляет процессор создавать дополнительную группу памяти в памяти, если одно или более последующих изображений не распределяются в выбранную группу памяти. Другими словами, дополнительная группа памяти создается, если одно или более последующих изображений не согласуются с или не группируются в соответствии с предварительно заданными диапазонами. Исполнение машиноисполняемых команд дополнительно заставляет распределять одно или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана.
Этапы, исполняемые машиноисполняемых командами, определяют процедуру, в которой изображения оперативно распределяются в различные группы памяти. При этом необязательно наличие заранее заданных групп памяти, так как они создаются по мере того, как неодинаковые изображения собираются и распределяются в дополнительную группу памяти.
Протокол магнитно-резонансной томографии может быть, например, мультисрезовым сбором данных с последовательностью однократного турбо-спин эхо или турбо-полевого эхо.
В некоторых примерах одно или более первых изображений и одно или более последующих изображений являются просто одиночным изображением. Например, выражение «одно или более последующих изображений» можно заменить выражением «последующее изображение». Выражение «одно или более первых изображений» можно заменить выражением «первое изображение».
Если имеется несколько изображений, например, имеется несколько первых изображений и несколько последующих изображений, то может быть несколько разных случаев. Во-первых, одно и то же изображение можно получать многократно с использованием импульсной последовательности. То есть, изображение одного и того же среза получают многократно. В других случаях, несколько изображений могут быть из разных срезов. В данном случае, оценка расстояния вычисляется для каждого из отдельных срезов.
Термин «набор групп памяти» можно понимать с разных точек зрения, в зависимости от того, каким образом набор реализуется. Например, в некоторых случаях, набор групп памяти может определяться элементами данных в базе данных. Например, различные изображения могут храниться в различных записях системы базы данных. В других случаях, изображения хранятся в компьютерной памяти или запоминающем устройстве и находятся просто по списку изображений с указанием групп, в которых они находятся. В еще одних примерах используются указатели или другие структуры, чтобы определять, к какому набору групп памяти относятся изображения.
Группу памяти можно также истолковывать с точки зрения такого известного понятия, как бин. Например, проблему распределения изображений в различные группы памяти можно рассматривать как проблему сортировки.
Число групп памяти, которые используются, не обязательно должно быть фиксированным в начале. Вместо этого применяется критерий, основанный на анализе изображений, чтобы решать для каждого вновь полученного изображения, подходит ли оно к существующей группе, или требуется ли создать новую группу.
Время измерения также не обязательно должно быть фиксированным. Для прекращения сбора данных можно использовать несколько критериев или сочетаний критериев: общая длительность сканирования ограничивается или определяет, происходит ли сбор информации слишком медленно (т.е. все изображения, собранные в течение последних секунд, относятся к уже существующей группе памяти).
В другом случае подразумевается, что метод не обязательно требует сбора данных опорного изображения.
Вместо этого можно использовать оценку подобия, основанную на анализе изображений, и критерий, когда создавать дополнительную группу. Метод можно применять следующим образом: Первое изображение, которое получают, невозможно сравнить ни с чем, поэтому оно формирует первую группу. Второе изображение и все остальные изображения, которые последуют, сравниваются со всеми существующими группами, и данное изображение помещается в группу, если оно является достаточно подобным. Если оно не подобно ни одной группе, то создается дополнительная группа, включающая в себя упомянутое изображение.
Оценку расстояния можно реализовать различными способами.
Одной фундаментальной оценкой может быть разность между двумя изображениями:
То есть, отображение в виде карты, присваивающее действительное число d(A,B) паре изображений A, B, при этом d(A,A)=0.
Оценка упомянутой разности может быть определена различными методами:
- Суммировать абсолютные разности значений пикселей d(A,B)=sumi(Ai-Bi)2.
- Вычислить корреляцию всех значений пикселей между A и B. По сравнению с 1, данный метод имеет преимущество в том, что глобальное пропорциональное изменение интенсивности между A и B не влияет на оценку.
- Или даже лучше, поскольку локальные флуктуации интенсивности не имеют значения: разбить каждое изображение на некоторое количество небольших отдельных участков и вычислить локальную корреляцию для каждого отдельного участка, затем усреднить значения корреляций для всех отдельных участков.
Выше приведены только некоторые примеры простых оценок разности, которые можно использовать при обработке изображений. Они также не зависят от причины разности между изображениями A и B.
Отличающаяся оценка расстояния, которая не зависит от разности между изображениями, описана ниже. Оценка разности является оценкой геометрических смещений. Один метод выполнения такой оценки состоит в использовании преобразования Ta изображения, которое зависит от набора параметров a, и которое может формировать новое изображение B'=Ta(B). Тогда, для любых двух изображений, оптимальные параметры aopt(A,B) преобразования можно задавать оптимизацией aopt(A,B)=minad(A,Ta(B)) (где d является одной из вышеприведенных простых оценок разности, которые не нуждаются в модели). И наконец, разность dT между A и B задается отображением в виде карты вектора параметра aopt в действительное число dT=s(aopt(A,B)).
Преимущество определения разности, основанной на приведенной модели, может быть в том, что влияние факторов, которые изменяют изображение, но которые не представляют интереса, можно ослабить правильным выбором модели.
Для конкретизации вышеизложенного: Моделью преобразования для 2-мерных изображений может быть интерполяция изображений, при которой прямоугольные координаты i',j' пикселей изображения B' отображаются в виде карты в координаты i,j в деформированной системе координат в исходном изображении. Такую деформированную систему координат можно задать, например, сплайновой интерполяцией на основе набора m×n контрольных точек на прямоугольной сетке. Тогда вектор параметра a, который описывает преобразование, является набором m×n векторов смещения контрольных точек. Значение s может быть средней величиной всех смещений.
Один альтернативный метод определения оценки разности изображений или оценки разности состоит в преобразовании обоих изображений A и B во что-то другое а затем в количественном определении разности между результатами преобразования: d(A,B):=dF(F(A),F(B)). Например, преобразование F может быть автоматическим обнаружением ориентиров на изображениях A и B, а dF является средним смещением между соответствующими ориентирами. Или F может быть автоматической сегментацией контура органа, и dF является оценкой разности для контуров.
И наконец, оценка разности между изображением A и группой изображений G по пункту 1 формулы изобретения может быть задана, например, на основании разности между двумя изображениями, d(A,B): например d(A,G)=min(B in G)d(A,B) или «max» или «mean» («среднее») вместо «min».
В другом варианте осуществления исполнение машиноисполняемых команд заставляет процессор принимать данные анатомической идентификации. Данные анатомической идентификации описывают одну или более анатомических структур внутри субъекта. Например, данные анатомической идентификации могут быть полезны для сегментации или идентификации анатомических ориентиров или для подбора анатомической модели к субъекту. Исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять данные о местоположении для каждой из упомянутого набора групп памяти. Данные о местоположении описывают местоположение одной или более анатомических структур внутри изображений каждой из упомянутого набора групп памяти. Например, данные анатомической идентификации можно совмещать с изображениями в каждой из упомянутого набора групп памяти. Тогда это обеспечивает ссылку на положение упомянутых анатомических идентификационных ориентиров или данных относительно каждого из изображений.
Исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять статистические данные о движении для одного или более анатомических местоположений с использованием данных о местоположении для каждой из набора групп памяти. Данный вариант осуществления может быть полезен потому, что он может обеспечивать статистические данные, относящиеся к зависимости местоположения конкретного участка субъекта от времени. Например, если анатомическая структура, которую желательно облучать радиоактивным или ультразвуковым излучением, идентифицирована анатомическими идентификационными данными, то знание местоположения упомянутой структуры в зависимости от времени может помочь решить, где направлять энергию в субъекта. Аналогично, если внутри субъекта присутствуют анатомические структуры, которые требуется защитить от воздействия или облучения радиоактивным или ультразвуковым излучением, то может быть полезным знать, как располагаются данные структуры в зависимости от времени или для отрезка времени.
Статистические данные о движении можно вычислять различными методами. Например, некоторые из групп памяти могут содержать больше изображений. Этим можно воспользоваться для присвоения более высокого весового коэффициента различным положениям для данной конкретной группы памяти.
В некоторых примерах можно усреднять каждую из упомянутого набора групп памяти или можно определять усредненное изображение и затем использовать усредненное изображение для определения статистических данных о движении. Даже если используется усредненное изображение, число изображений в конкретном наборе групп памяти все же можно использовать для взвешивания значения или влияния данного конкретного усредненного изображения.
В другом варианте осуществления каждая из упомянутого набора групп памяти содержит изображения.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор принимать план терапии. Исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять команды лучевой терапии для управления системой лучевой терапии с помощью плана терапии и статистических данных о движении.
В другом варианте осуществления система магнитно-резонансной томографии содержит систему лучевой терапии, а исполнение машиноисполняемых команд заставляет процессор управлять системой лучевой терапии с помощью команд лучевой терапии.
В другом варианте осуществления оценка расстояния вычисляется для одной или более исследуемых областей. Оценку расстояния, возможно, полезно ограничивать конкретной исследуемой областью. Например, если формируется изображение исследуемой области, в которой анатомические структуры являются нестатическими или ригидными, ограничение оценки расстояния конкретной областью или исследуемыми областями может повысить качество статистических данных о движении данной зоны.
Например, несколько оценок расстояния можно объединять разными методами. Можно использовать среднее значение нескольких оценок расстояния. Можно использовать максимальное значение из нескольких оценок расстояния. Можно использовать минимальное значение из нескольких оценок расстояния. Можно использовать срединное значение из нескольких оценок расстояния.
Несколько оценок расстояния можно объединять в средневзвешенное значение или взвешенную сумму нескольких оценок расстояния. Например, если имелось две оценки расстояния, одна для мягкой ткани в абдоминальной полости и одна для ткани, окружающей ребра, то можно присваивать вес сумме оценок расстояния таким образом, чтобы мягкая ткань больше влияла на общую оценку расстояния.
В другом варианте осуществления одна или более исследуемых областей являются предварительно заданными. Например, исследуемая область может быть задана анатомическими данными или другой информацией, которая принимается.
В другом примере одна или более исследуемых областей выявляются автоматически сегментацией изображений и их определением. В других примерах одна или более исследуемых областей может приниматься с данными, которые вводятся на интерфейсе пользователя систем магнитно-резонансной томографии.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор идентифицировать одну или более исследуемых областей в соответствии с любым из следующих методов: посредством применения алгоритма сегментации изображения, посредством приема выполненной вручную сегментации изображения и посредством передачи опорной сегментации с использованием оценки расстояния.
В другом варианте осуществления одна или более исследуемых областей содержат по меньшей мере одну ригидную исследуемую область и по меньшей мере одну деформируемую исследуемую область. Это может быть полезно в ситуациях, в которых внутри субъекта существуют ригидные структуры и подвижные структуры. Например, если формируется изображение абдоминальной полости субъекта, то такие зоны, как ребра и позвоночник будут ригидными и будут перемещаться как жесткое тело. Однако органы внутри абдоминальной полости могут свободно сдвигаться и перемещаться относительно упомянутых неизменных структур. Определение границ разнотипных исследуемых областей, например, ригидных и деформируемых, в пределах одного изображения может дать в результате усовершенствованную группировку изображений в различные наборы групп памяти.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять отображение в виде карты средних разностей для каждой из упомянутого набора групп памяти. Например, карта разностей может быть картой оптических потоков или смещений относительно опорного изображения или группы в некоторых примерах.
В одном примере «отображение в виде карты средних разностей» может быть средним значением всех aopt(A,B), где A взято из опорной группы, а B взято из выбранной группы памяти.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять отображение в виде карты средних разностей для каждой из упомянутого набора групп памяти по отношению к выбранной опорной группе. Выбранная опорная группа является одной из набора групп памяти. Например, выбранная опорная группа может содержать усредненное изображение, которое вычисляется. Отображение в виде карты средних разностей для каждой из упомянутого набора групп памяти может быть вычислено по отношению к данному усредненному изображению.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять отображение в виде карты разностей между каждым изображением в отобранной группе памяти, выбранной из набора групп памяти, и отображением в виде карты средних разностей. Исполнение машиноисполняемых команд дополнительно заставляет процессор отбирать из отобранной группы памяти отобранное изображение, которое минимизирует статистическую оценку, применяемую к отображению в виде карты разностей. Исполнение машиноисполняемых команд дополнительно заставляет процессор сохранять отобранное изображение как усредненное изображение для отобранной группы памяти. В приведенном примере изображение, которое является, по существу, ближайшим к усредненному изображению, отбирается как усредненное изображение.
Статистическая оценка может быть, например, минимальным средним смещением от карты средних расстояний.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять преобразованное изображение для отобранного изображения в отобранной группе памяти с использованием отображения в виде карты средних разностей. Преобразованное изображение сохраняется как усредненное изображение для отобранной группы памяти. В приведенном примере усредненное изображение по-прежнему является изображением, которое является ближайшим к усредненному изображению; однако, в приведенном конкретном примере усредненное изображение преобразуется так, чтобы оно еще точнее соответствовало усредненному изображению.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять отображение в виде карты разностей между каждым изображением в отобранной группе памяти, выбранной из набора групп памяти, и отображением в виде карты средних разностей. Исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять преобразованное изображение для каждого изображения в отобранной группе памяти с использованием отображения разностей для каждого изображения. Исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять усредненное изображение для отобранной группы памяти посредством усреднения каждого преобразованного изображения из отобранной группы памяти. В приведенном примере вычисляется отображение в виде карты средних разностей. Данное отображение в виде карты используется для определения, насколько удалено каждое изображение от усредненного изображения. Затем каждое изображение в группе памяти преобразуется так, чтобы оно точнее соответствовало усредненному изображению. Затем упомянутые преобразованные изображения усредняются, чтобы создать усредненное изображение, которое точно представляет средние значения отобранной группы памяти.
В другом варианте осуществления исполнение машиноисполняемых команд дополнительно заставляет процессор представить изображение, зависящее от времени, с использованием усредненного изображения для каждой из упомянутого набора групп памяти. Изображение, зависящее от времени, может быть, например, в разных формах. Упомянутое изображение может быть в форме анимации, или оно может также отображать местоположение разных анатомических привязок или местоположений внутри субъекта, которые взвешены в зависимости от времени. Например, местоположение конкретного органа может быть размытым для представления его местоположения в зависимости от времени.
В другом варианте осуществления оценка расстояния содержит любую оценку из следующих: среднего смещения, идентификации поля равномерного движения, идентификации поля локального движения и их сочетаний.
В другом варианте осуществления одно или более опорных изображений являются единственным опорным изображением среза. Одно или более последующих изображений является одиночным последующим изображением среза.
В другом аспекте изобретение предлагает компьютерный программный продукт, содержащий машиноисполняемые команды для исполнения процессором, управляющим системой магнитно-резонансной томографии, которая предназначена для сбора магнитно-резонансных данных от субъекта. Система магнитно-резонансной томографии содержит память для хранения команд импульсной последовательности. Команды импульсной последовательности заставляют систему магнитно-резонансной томографии собирать магнитно-резонансные данные в соответствии с протоколом магнитно-резонансной томографии. Исполнение машиноисполняемых команд заставляет процессор собирать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности.
Исполнение машиноисполняемых команд дополнительно заставляет процессор реконструировать одно или более первых изображений из первых последующих магнитно-резонансных данных. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно повторно собирать последующие магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно реконструировать одно или более последующих изображений из последующих магнитно-резонансных данных. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно вычислять оценку расстояния между одним или более последующими изображениями и каждой из упомянутого набора групп памяти.
Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно распределять одно или более последующих изображений в выбранную группу памяти, если оценка расстояния между выбранной группой и одним или более последующими изображениями находится в пределах предварительно заданного диапазона. Выбранная группа памяти является одной из упомянутого набора групп памяти. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно создавать дополнительную группу памяти в памяти, если одно или более последующих изображений не распределяются в выбранную группу памяти. Исполнение машиноисполняемых команд дополнительно заставляет процессор многократно распределять одно или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана.
В другом аспекте изобретение предлагает способ работы системы магнитно-резонансной томографии, предназначенной для сбора магнитно-резонансных данных от субъекта. Способ содержит этап сбора первых магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности. Команды импульсной последовательности заставляет систему магнитно-резонансной томографии собирать магнитно-резонансные данные в соответствии с протоколом магнитно-резонансной томографии. Способ дополнительно содержит этап реконструкции одного или более первых изображений из первых магнитно-резонансных данных. Способ дополнительно содержит этап распределения одного или более первых изображений в первую группу памяти из набора групп памяти. Каждая из упомянутого набора групп памяти содержит изображения. Способ дополнительно содержит этап многократного повторного сбора последующих магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности. Способ дополнительно содержит этап многократной реконструкции одного или более последующих изображений из последующих магнитно-резонансных данных. Способ дополнительно содержит этап многократного вычисления оценки расстояния между одним или более последующими изображениями и каждой из упомянутого набора групп памяти. Способ дополнительно содержит этап многократного распределения одного или более последующих изображений в выбранную группу памяти, если оценка расстояния между выбранной группой и одним или более последующими изображениями находится в пределах предварительно заданного диапазона. Выбранная группа памяти является одной из упомянутого набора групп памяти. Способ дополнительно содержит этап многократного создания дополнительной группы памяти в памяти, если одно или более последующих изображений не распределяются в выбранную группу памяти. Способ дополнительно содержит этап распределения одного или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана.
Следует понимать, что один или более из вышеупомянутых вариантов осуществления изобретения можно объединять, при условии, что объединенные варианты осуществления не являются взаимно исключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В последующем будут описаны предпочтительные варианты осуществления, исключительно для примера, и со ссылкой на чертежи, на которых:
Фиг. 1 иллюстрирует пример системы магнитно-резонансной томографии;
Фиг. 2 показывает блок-схему последовательности операций, поясняющую пример способа работы системы магнитно-резонансной томографии, показанной на фиг. 1; и
Фиг. 3 показывает блок-схему, которая поясняет дополнительный пример способа работы системы магнитно-резонансной томографии, показанной на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Элементы, обозначенные подобными цифровыми позициями, на фигурах либо являются эквивалентными элементами, либо выполняют одну и ту же функцию. Элементы, которые описаны прежде, не обязательно будут рассматриваться на последующих фигурах, если выполняют эквивалентную функцию.
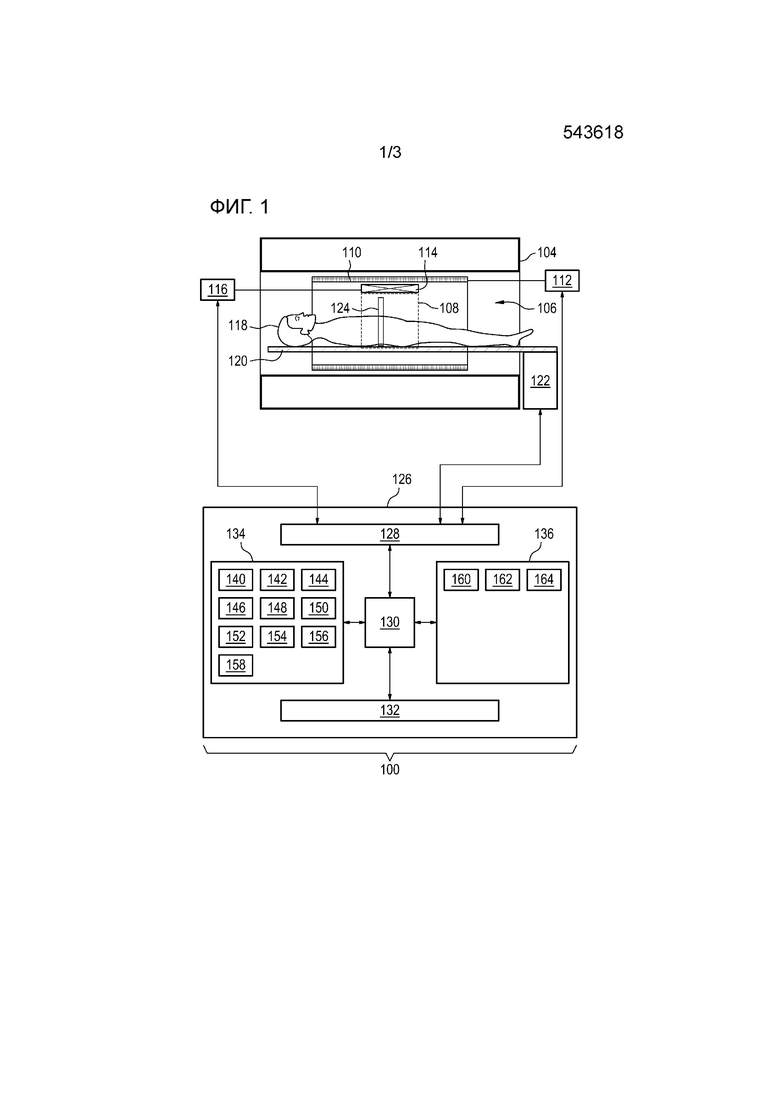
Фиг. 1 представляет пример системы 100 магнитно-резонансной томографии с магнитом 104. Магнит 104 является сверхпроводящим магнитом 104 цилиндрического типа со сквозным туннелем 106. Возможно также применение магнитов других типов; например, возможно также применение как разъемного цилиндрического магнита, так и, так называемого, открытого магнита. Разъемный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции, чтобы допускать доступ к изоплоскости магнита, и такие магниты можно использовать, например, в связи с лучевой терапией заряженными частицами. Открытый магнит имеет две секции магнита, одну над другой, с пространством между ними, которое является достаточно большим для вмещения субъекта: расположение зоны двух секций подобно тому, как у катушки Гельмгольца. Открытые магниты распространения потому, что меньше ограничивают субъекта. Внутри криостата цилиндрического магнита находится группа сверхпроводящих катушек. Внутри туннеля 106 цилиндрического магнита 104 находится зона 108 визуализации, в которой магнитное поле является достаточно сильным и однородным для выполнения магнитно-резонансной визуализации.
Внутри туннеля 106 магнита находится также набор катушек 110 градиентного магнитного поля, которые применяются для сбора магнитно-резонансных данных, чтобы пространственно кодировать магнитные спины внутри зоны 108 визуализации магнита 104. Катушки 110 градиентного магнитного поля подсоединены к источнику 112 питания катушек градиентного магнитного поля. Предполагается, что катушки 110 градиентного магнитного поля являются репрезентативными. Обычно, катушки градиентного магнитного поля 110 содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания катушек градиентного магнитного поля подает ток в катушки градиентного магнитного поля. Ток, подаваемый в катушки 110 градиентного магнитного поля, является управляемым в зависимости от времени и может быть пилообразным или импульсным.
Вблизи зоны 108 визуализации находится радиочастотная катушка 114 для манипуляции ориентациями магнитных спинов в пределах зоны 108 визуализации и для приема радиосигналов, распространяющихся от спинов также в пределах зоны 108 визуализации. Радиочастотная антенна может содержать несколько катушечных элементов. Радиочастотная антенна может также называться каналом или антенной. Радиочастотная катушка 114 соединена с радиочастотным приемопередатчиком 116. Радиочастотная катушка 114 и радиочастотный приемопередатчик 116 могут быть заменены раздельными передающей и приемной катушками и раздельными передатчиком и приемником. Следует понимать, что радиочастотная катушка 114 и радиочастотный приемопередатчик 116 являются репрезентативными. Предполагается, что радиочастотная катушка 114 представляет также специальную передающую антенну и специальную приемную антенну. Аналогично, приемопередатчик 116 может также представлять раздельные передатчик и приемники. Радиочастотная катушка 114 может также содержать несколько приемных/передающих элементов, а радиочастотный приемопередатчик 116 может содержать несколько приемных/передающих каналов.
В пределах зоны 108 визуализации можно наблюдать рамку, обозначенную позицией 124. Данная рамка показывает положение среза 124, который используется для сбора магнитно-резонансных данных изображения из абдоминальной области субъекта 118.
Внутри туннеля 106 магнита 104 находится опора 120 субъекта, которая закреплена к необязательному приводному устройству 122, которое может двигать опору субъекта и субъекта 118 по зоне 108 визуализации. Приемопередатчик 116, источник 112 питания катушек градиентного магнитного поля и приводное устройство 122 показаны все подсоединенными к аппаратному интерфейсу 128 компьютерной системы 126.
Содержимое компьютерного запоминающего устройства 134 и компьютерной памяти 136 может быть взаимозаменяемым. В некоторых примерах содержимое компьютерного запоминающего устройства 134 может быть продублированным в компьютерной памяти 136.
Компьютерное запоминающее устройство показано как содержащее команды 140 импульсной последовательности, которые дают возможность процессору 130 управлять компонентами системы 100 магнитно-резонансной томографии для сбора магнитно-резонансных данных. Команды 140 импульсной последовательности использовались для сбора первых магнитно-резонансных данных 142 и для многократного сбора последующих магнитно-резонансных данных 148. Показано, что как данные 142, так и данные 148 хранятся в компьютерном запоминающем устройстве 134. Дополнительно показано, что компьютерное запоминающее устройство 134 содержит одно или более первых изображений 144, которые были реконструированы из первых магнитно-резонансных данных 142. Дополнительно показано, что компьютерное запоминающее устройство 134 содержит базу данных 146 изображений, которая используется для хранения групп изображений.
База данных 146 может быть в разных формах. Например, в некоторых случаях, база данных изображений может быть реляционной базой данных и может содержать другую информацию об изображениях, которые могут запрашиваться. Например, в базе данных 146 изображений могут храниться упомянутые статистические оценки и операции, которые выполняются с различными изображениями, и поэтому их не требуется пересчитывать. Дополнительно показано, что компьютерное запоминающее устройство 134 содержит одно или более последующих изображений 150, которые реконструированы из последующих магнитно-резонансных данных 148. Дополнительно показано, что компьютерное запоминающее устройство 134 содержит оценку 152 расстояния, которая была подсчитана для одного или более последующих изображений 150. В таком случае, оценка 152 расстояния будет применяться для сравнения двух групп в базе данных 146 изображений и для либо помещения одного или более последующих изображений 150 в существующую группу, либо создания дополнительной группы в базе данных 146.
Компьютерное запоминающее устройство 134 показано также с несколькими дополнительными элементами данных. Ими могут быть, например, анатомические идентификационные данные 154, которые были приняты компьютером 126. Эти данные могут служить для сегментации или иной обработки одного или более последующих изображений 150, чтобы получить данные 156 о местоположении анатомических привязок или ориентиров внутри субъекта 118. В изображениях в базе данных 146 упомянутые данные 156 о местоположении проанализированы, и сформированы статистические данные 158 о движении.
Компьютерная память 136 показана содержащей модуль 160 управления. Модуль управления дает возможность процессору 130 управлять работой и функцией системы 100 магнитно-резонансной томографии. Например, модуль 160 управления может давать возможность процессору 130 управлять сбором магнитно-резонансных данных с помощью команд 140 импульсной последовательности. Дополнительно показано, что компьютерная память 136 содержит модуль 162 реконструкции изображений. Модуль 162 реконструкции изображений содержит исполняемый компьютером код, который дает возможность процессору 130 реконструировать магнитно-резонансные изображения 144, 150 из магнитно-резонансных данных 142, 148. Дополнительно показано, что компьютерная память 136 содержит модуль 164 обработки изображений.
Модуль 164 обработки изображений дает возможность процессору 130 выполнять различные методы обработки изображений, например, определение местоположения анатомических привязок, с использованием анатомических идентификационных данных 154, сравнение разных изображений или групп изображений, чтобы вычислять оценку 152 расстояния, и выполнять другие задачи, например, формирование статистических данных 158 о движении. Модуль 164 обработки изображений в некоторых случаях может также содержать модули или секции, которые дают возможность процессору 130 идентифицировать и вычислять оценку 152 расстояния на основании разных исследуемых областей в изображениях.
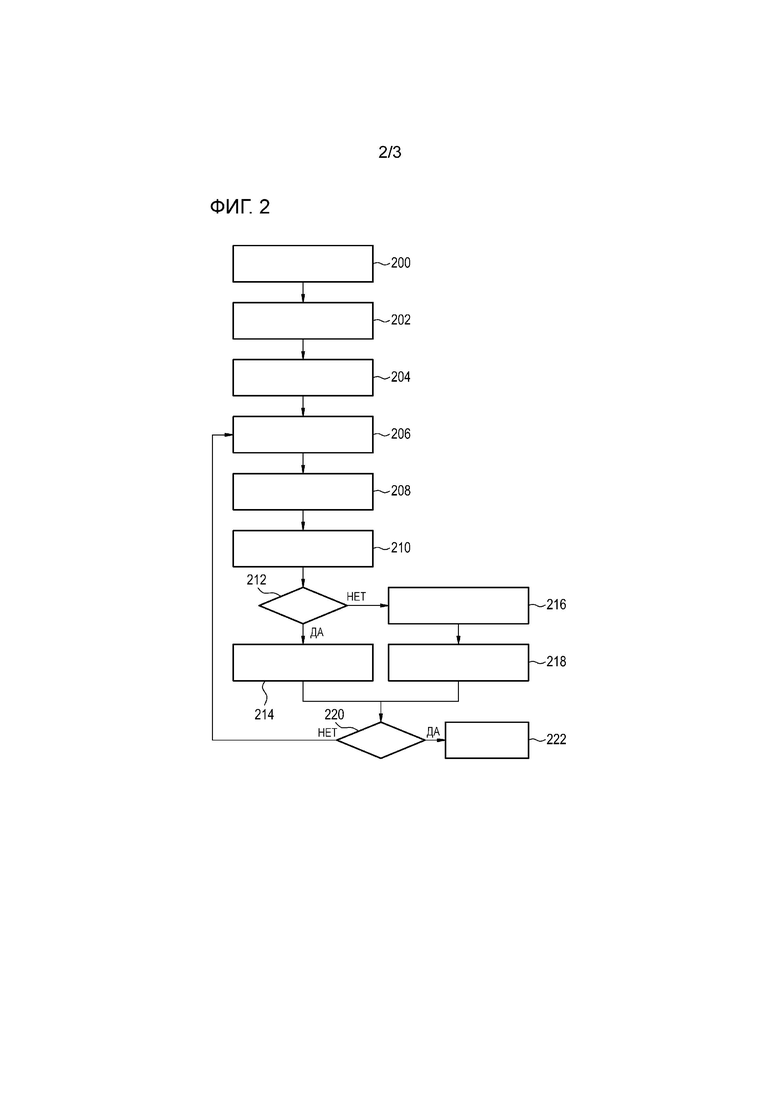
Фиг. 2 представляет блок-схему последовательности операций, которая поясняет примерный способ работы системы 100 магнитно-резонансной томографии, показанной на фиг. 1. Сначала, на этапе 200 собирают первые магнитно-резонансные данные 142 посредством управления системой 100 магнитно-резонансной томографии с помощью команд 140 импульсной последовательности. Затем на этапе 202 первые магнитно-резонансные данные 142 реконструируют в одно или более первых изображений 144. Затем на этапе 204 одно или более первых изображений 144 распределяют в первую группу памяти из набора групп памяти. В примере, приведенном на фиг. 1, упомянутое одно или более первых изображений распределяют в первую группу в базе данных 146 изображений. Затем, на этапе 206 собирают последующие магнитно-резонансные данные 148 посредством управления системой 100 магнитно-резонансной томографии с помощью команд 140 импульсной последовательности. На этапе 208 упомянутое одно или более последующих изображений 150 реконструируют из последующих магнитно-резонансных данных 148.
Затем на этапе 210 вычисляют оценку 152 расстояния между упомянутым одним или более последующими изображениями 150 и каждой из упомянутого набора групп памяти. Затем на этапе 212 оценку расстояния сравнивают с оценками расстояний или диапазоном оценок расстояний для каждой из упомянутого набора групп памяти. Знак вопроса в рамке этапа 212 означает: попадает ли оценка 152 расстояния в одну из существующих групп памяти? Если ответом является да, то способ переходит на этап 214. Если ответом является нет, то способ переходит на этап 216. На этапе 214 одно или более последующих изображений 150 распределяют в выбранную группу памяти, если оценка 152 расстояния между выбранной группой и упомянутым одним или более последующими изображениями находится в пределах предварительно заданного диапазона. На этапе 216 процессор 130 дает команду базе данных 146 создать дополнительную группу памяти. Затем, на этапе 218 упомянутое одно или более последующих изображений 150 распределяют в дополнительную группу памяти. Оба этапа 214 и 218 переходят к этапу 220. Этап 220 содержит вопрос, закончен ли сбор данных. Если ответом является нет, то способ возвращается обратно на этап 206. Если ответом является да, то способ переходит на этап 222. На этапе 222 способ завершается.
Представлен способ 4D-МРТ, который в некоторых примерах может работать без датчика и априорных допущений относительно ожидаемых составляющих движения и потому допускающий сбор полных статистических данных о движении целевой области. Вместо применения механизмов запуска для обнаружения состояний движения и выполнения сканирования только тогда, когда достигнуто требуемое состояние, предлагается собирать срезы объема с наибольшим возможным коэффициентом заполнения (без запуска) и применять обработку изображений в реальном времени, чтобы сортировать отдельные срезы 4-мерного сканирования в соответствующие бины 4D-МРТ-сканирования. Изображения, соответствующие одному бину, могут подвергаться согласованию невязок таким образом, что большинство полученных изображений в одном бине можно усреднять для получения максимально возможного отношения сигнала к шуму в изображениях. Изображения или подобласти изображений, относящиеся к одному бину, которые нельзя согласовать с достаточной точностью (измеряемой, например, как корреляция с опорным изображением бина (первым или средним изображением)) можно отбросить. Для заданного номера среза бины могут создаваться постоянно в зависимости от измеренного движения, т.е. если вновь собранное изображение отличается от уже представленных бинов больше, чем на заданное пользователем значение (специально заданную единицу смещения, подлежащую разрешению). Критерий полного завершения сканирования выбирается так, чтобы обеспечивать оптимальное сочетание охвата состояний движения и времени сканирования: Сканирование определяется как завершенное, если все срезы собраны, а степень принятия изображения или скорость создания последующего бина ниже определяемого порога.
В случае если требуются 4-мерные объемы, то непрерывность движения в пространстве и времени можно использовать для распределения полученных изображений в отдельные объемы.
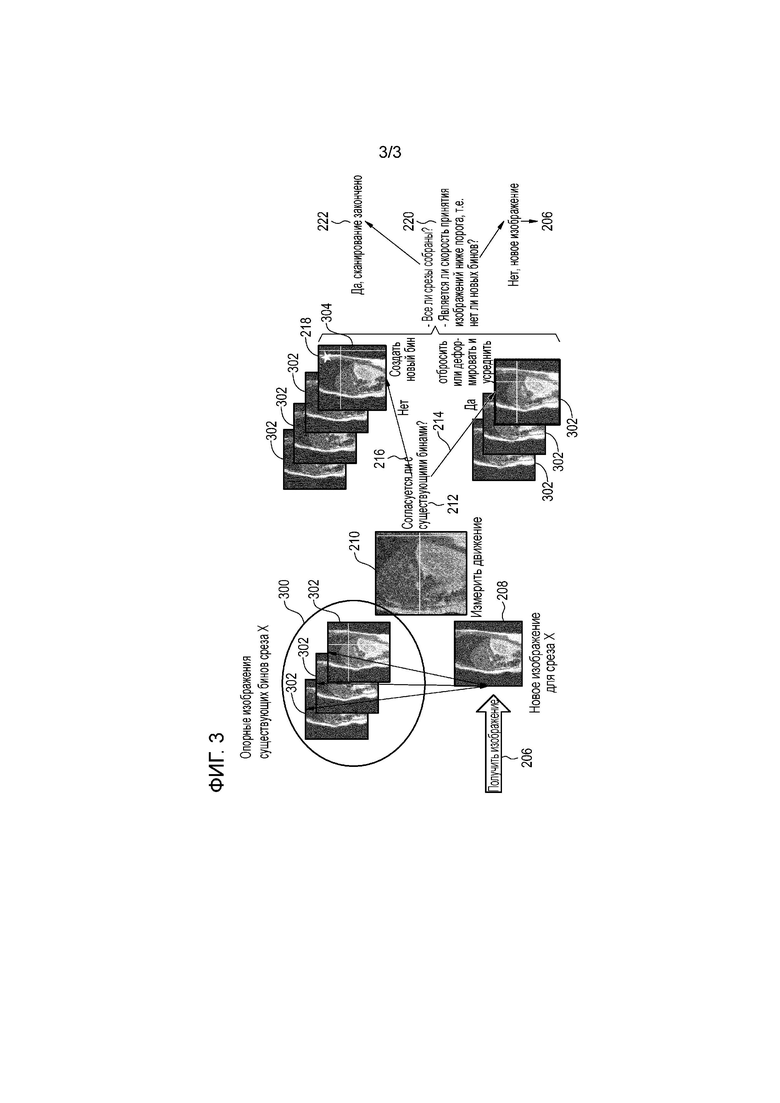
Фиг. 3 является графическим представлением способа работы системы 100 магнитно-резонансной томографии, показанной на фиг. 1. Сначала, на этапе 206 получают изображение. Затем полученное изображение реконструируют в изображение 208. Круг 300 представляет упомянутый набор групп памяти. В этом наборе групп 300 памяти содержится несколько существующих групп 302 памяти. На этапе 210 изображение 208 сравнивают с существующими группами 302 памяти. Сравнение служит для вычисления оценки расстояния. В данном примере оценка расстояния является оптическим потоком. Затем оценку расстояния сравнивают на этапе 212, чтобы определить, согласуется ли она или нет с существующим бином или группой памяти. Если согласуется, то изображение связывается с существующей группой 302 памяти. Если не согласуется, то выполняется вышеописанный этап 216. Создают дополнительную группу 304 памяти, а изображение 208 распределяют в дополнительную группу 304 памяти. После того, как этапы 214, 216 и связанные этапы выполнены, способ переходит на этап 220. Если получены все срезы, то сканирование заканчивают 222. Если нет, то способ возвращается обратно на этап 206 и собирают следующее изображение.
На данной фигуре представлена альтернатива запросу на этапе 220, если скорость принятия усредненного изображения ниже конкретного порога, то способ также может заканчиваться. Например, если способ выполнит установленное число циклов и никаких дополнительных бинов или групп памяти не добавлено, то можно считать, что движение субъекта полностью охарактеризовано, и способ может завершиться.
Хотя изобретение подробно показано и изложено на чертежах и в вышеприведенном описании, упомянутые изображения и описание следует считать наглядными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
После изучения чертежей, описания и прилагаемой формулы изобретения, специалистами в данной области техники в процессе практической реализации заявленного изобретения могут быть разработаны и выполнены другие модификации раскрытых вариантов осуществления. В формуле изобретения, формулировка «содержащий» не исключает других элементов или этапов, и признак единственного числа не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно различающихся зависимых пунктах формулы изобретения, не означает невозможность применения комбинации упомянутых признаков в подходящем случае. Компьютерная программа может храниться/распространяться на подходящем носителе, например, оптическом носителе данных или полупроводниковом носителе, поставляемом совместно с другими аппаратным обеспечением или в его составе, но может также распространяться в других формах, например, по сети Интернет или в других проводных или беспроводных телекоммуникационных системах. Никакие позиции в формуле изобретения нельзя считать ограничивающими объем изобретения.
СПИСОК ПОЗИЦИЙ
100 магнитно-резонансная система
104 магнит
106 туннель магнита
108 зона измерения или зона визуализации
110 катушки градиентного магнитного поля
112 источник питания катушек градиентного магнитного поля
114 радиочастотная катушка
116 приемопередатчик
118 субъект
120 опора субъекта
122 приводное устройство
124 срез
126 компьютерная система
128 аппаратный интерфейс
130 процессор
132 пользовательский интерфейс
134 компьютерное запоминающее устройство
136 компьютерная память
140 команды импульсной последовательности
142 первые магнитно-резонансные данные
144 одно или более первых изображений
146 база данных изображений
148 последующие магнитно-резонансные данные
150 одно или более последующих изображений
152 оценка расстояния
154 анатомические идентификационные данные
156 данные о местоположении
158 статистические данные о движении
160 модуль управления
162 модуль реконструкции изображений
164 модуль обработки изображений
200 собрать первые магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности
202 реконструировать одно или более первых изображений из опорных магнитно-резонансных данных
204 распределить одно или более первых изображений в первую группу памяти из набора групп памяти
206 собрать последующие магнитно-резонансные данные посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности
208 реконструировать одно или более последующих изображений из последующих магнитно-резонансных данных
210 вычислить оценку расстояния между упомянутым одним или более последующими изображениями и каждой из упомянутого набора групп памяти
212 относится ли изображение к существующей группе?
214 распределить упомянутое одно или более последующих изображений в выбранную группу памяти, если оценка расстояния между выбранной группой и упомянутым одним или более последующими изображениями находится в пределах предварительно заданного диапазона
216 создать дополнительную группу памяти в памяти, если упомянутое одно или более последующих изображений не распределяются в выбранную группу памяти
218 распределить упомянутое одно или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана
220 Все ли изображения получены?
300 набор групп памяти
302 существующая группа памяти
304 дополнительная группа памяти
Использование: для магнитно-резонансной томографии. Сущность изобретения заключается в том, что способ работы системы магнитно-резонансной томографии содержит этапы: сбора первых магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности, реконструкции одного или более первых изображений из первых магнитно-резонансных данных и распределения упомянутых одного или более первых изображений в первую группу памяти из набора групп памяти. Способ дополнительно содержит многократное выполнение следующих этапов: сбор последующих магнитно-резонансных данных посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности, реконструкция одного или более последующих изображений из последующих магнитно-резонансных данных, вычисление оценки расстояния между упомянутым одним или более последующими изображениями и каждой из упомянутого набора групп памяти, распределение упомянутого одного или более последующих изображений в выбранную группу памяти, если оценка расстояния между выбранной группой и упомянутым одним или более последующими изображениями находится в пределах предварительно выбранного диапазона, создание дополнительной группы памяти в памяти, если упомянутое одно или более последующих изображений не распределяются в выбранную группу памяти, и распределение упомянутого одного или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана. Технический результат: обеспечение возможности повышения точности изображений, характеризующих движения. 3 н. и 12 з.п. ф-лы, 3 ил.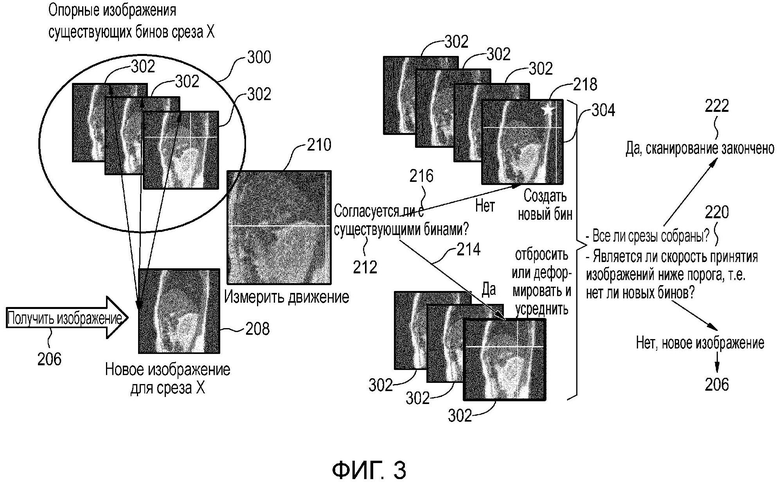
1. Система (100) магнитно-резонансной томографии для сбора магнитно-резонансных данных (142, 148) от субъекта (118), дополнительно выполненная с возможностью создания набора групп памяти, содержащего множество групп памяти, и распределения одного или более полученных изображений в каждую из групп памяти, при этом система магнитно-резонансной томографии содержит:
- память (136) для хранения машиноисполняемых команд (160, 162, 164) и команд (140) импульсной последовательности, причем команды импульсной последовательности заставляют систему магнитно-резонансной томографии собирать магнитно-резонансные данные в соответствии с протоколом магнитно-резонансной томографии;
- процессор (130) для управления системой магнитно-резонансной томографии,
причем исполнение машиноисполняемых команд заставляет процессор:
- собирать (200) первые магнитно-резонансные данные (142) посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности; и
- реконструировать (202) одно или более первых изображений (144) из первых магнитно-резонансных данных;
- распределять (204) упомянутое одно или более первых изображений в первую группу памяти,
причем исполнение машиноисполняемых команд заставляет процессор многократно:
- собирать (206) последующие магнитно-резонансные данные (148) посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности;
- реконструировать (208) одно или более последующих изображений (150) из последующих магнитно-резонансных данных;
многократно
- вычислять (210) оценку (152) расстояния между упомянутыми одним или более последующими изображениями и по меньшей мере одним из упомянутых одного или более полученных изображений, распределенных в группу памяти, для каждой из упомянутого набора групп памяти;
- распределять (214) упомянутое одно или более последующих изображений в существующую группу памяти, если оценка расстояния между по меньшей мере одним из упомянутых одного или более полученных изображений, распределенных в существующую группу памяти, и упомянутым одним или более последующими изображениями находится в пределах предварительно заданного диапазона;
- создавать (216) дополнительную группу (304) памяти, если упомянутое одно или более последующих изображений не распределяются в существующую группу памяти; и
- распределять (218) упомянутое одно или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана.
2. Система магнитно-резонансной томографии по п. 1, причем исполнение машиноисполняемых команд заставляет процессор:
- принимать анатомические идентификационные данные (154), характеризующие одну или более анатомических структур внутри субъекта;
- вычислять данные (156) о местоположении для каждой из упомянутого набора групп памяти, при этом данные о местоположении характеризуют местоположение упомянутой одной или более анатомических структур в изображениях каждой из упомянутого набора групп памяти; и
- вычислять статистические данные (158) о движении для упомянутого одного или более анатомических местоположений с использованием данных о местоположении для каждой из упомянутого набора групп памяти.
3. Система магнитно-резонансной томографии по п. 2, причем исполнение машиноисполняемых команд дополнительно заставляет процессор:
- принимать план терапии и
- вычислять команды лучевой терапии для управления системой лучевой терапии с использованием плана терапии и статистических данных о движении.
4. Система магнитно-резонансной томографии по пп. 1, 2 или 3, причем оценка расстояния вычисляется в пределах одной или более исследуемых областей.
5. Система магнитно-резонансной томографии по п. 4, причем упомянутая одна или более исследуемых областей предварительно заданы.
6. Система магнитно-резонансной томографии по п. 5, причем исполнение машиноисполняемых команд дополнительно заставляет процессор идентифицировать упомянутую одну или более исследуемых областей в соответствии с любым из следующего: посредством применения алгоритма сегментации изображения, посредством приема выполненной вручную сегментации изображения и посредством передачи опорной сегментации с использованием оценки расстояния.
7. Система магнитно-резонансной томографии по любому из пп. 5 или 6, причем упомянутая одна или более исследуемых областей содержит по меньшей мере одну ригидную исследуемую область и по меньшей мере одну деформируемую исследуемую область.
8. Система магнитно-резонансной томографии по любому из предшествующих пунктов, причем исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять отображение в виде карты средних разностей для каждой из упомянутого набора групп памяти относительно выбранной опорной группы, при этом выбранная опорная группа является одной из упомянутого набора групп памяти.
9. Система магнитно-резонансной томографии по п. 8, причем исполнение машиноисполняемых команд дополнительно заставляет процессор:
- вычислять отображение в виде карты разностей между каждым изображением в отобранной группе памяти, выбранной из упомянутого набора групп памяти, и отображением в виде карты средних расстояний; и
- отбирать из отобранной группы памяти отобранное изображение, которое минимизирует статистическую оценку, применяемую к отображению в виде карты разностей;
- сохранять отобранное изображение как усредненное изображение для отобранной группы памяти.
10. Система магнитно-резонансной томографии по п. 9, причем исполнение машиноисполняемых команд дополнительно заставляет процессор вычислять преобразованное изображение для отобранного изображения в отобранной группе памяти с использованием отображения в виде карты средних разностей, и при этом преобразованное изображение сохраняется как усредненное изображение для отобранной группы памяти.
11. Система магнитно-резонансной томографии по п. 8, причем исполнение машиноисполняемых команд дополнительно заставляет процессор:
- вычислять отображение в виде карты разностей между каждым изображением в отобранной группе памяти, выбранной из упомянутого набора групп памяти, и отображением в виде карты средних разностей;
- вычислять преобразованное изображение для каждого изображения в отобранной группе памяти с использованием отображения в виде карты разностей для каждого изображения; и
- вычислять усредненное изображение для отобранной группы памяти посредством усреднения каждого преобразованного изображения из отобранной группы памяти.
12. Система магнитно-резонансной томографии по пп. 8-11, причем исполнение машиноисполняемых команд заставляет процессор представить изображение, зависящее от времени, с использованием усредненного изображения для каждой из упомянутого набора групп памяти.
13. Система магнитно-резонансной томографии по любому из предшествующих пунктов, причем оценка расстояния содержит любое из следующего: среднее смещение, идентификация поля равномерного движения, идентификация поля локального движения и их сочетания.
14. Машиночитаемый носитель, на котором хранится компьютерный программный продукт, содержащий машиноисполняемые команды (160, 162, 164) для исполнения процессором (130), управляющим системой (100) магнитно-резонансной томографии для сбора магнитно-резонансных данных (142, 148) от субъекта (118), дополнительно выполненной с возможностью создания набора групп памяти, содержащего множество групп памяти, и распределения одного или более полученных изображений в каждую из упомянутых групп памяти, при этом система магнитно-резонансной томографии содержит память (136) для хранения команд импульсной последовательности, причем команды импульсной последовательности заставляют систему магнитно-резонансной томографии собирать магнитно-резонансные данные в соответствии с протоколом магнитно-резонансной томографии, причем исполнение машиноисполняемых команд заставляет процессор:
- собирать (200) первые магнитно-резонансные данные (142) посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности; и
- реконструировать (202) одно или более первых изображений (144) из первых магнитно-резонансных данных;
- распределять (204) упомянутое одно или более первых изображений в первую группу памяти;
причем исполнение машиноисполняемых команд заставляет процессор многократно:
- собирать (206) последующие магнитно-резонансные данные (148) посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности;
- реконструировать (208) одно или более последующих изображений (150) из последующих магнитно-резонансных данных;
многократно
- вычислять (210) оценку (152) расстояния между упомянутыми одним или более последующими изображениями и по меньшей мере одним из упомянутых одного или более полученных изображений, распределенных в группу памяти, для каждой из упомянутого набора групп памяти;
- распределять (214) упомянутое одно или более последующих изображений в существующую группу памяти, если оценка расстояния между по меньшей мере одним из упомянутых одного или более полученных изображений, распределенных в существующую группу памяти, и упомянутым одним или более последующими изображениями находится в пределах предварительно заданного диапазона;
- создавать (216) дополнительную группу памяти в памяти, если упомянутое одно или более последующих изображений не распределяются в выбранную группу памяти; и
- распределять (218) упомянутое одно или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана.
15. Способ работы системы (100) магнитно-резонансной томографии, выполненной с возможностью сбора магнитно-резонансных данных (142, 148) от субъекта (118), дополнительно выполненной с возможностью создания набора групп памяти, содержащего множество групп памяти, и распределения одного или более собранных изображений в каждую из групп памяти, при этом способ содержит этапы:
- сбора (200) первых магнитно-резонансных данных (142) посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности и
- реконструкции (202) одного или более первых изображений (144) из первых магнитно-резонансных данных;
- распределения (204) упомянутого одного или более первых изображений в первую группу памяти;
причем исполнение машиноисполняемых команд заставляет процессор многократно выполнять этапы:
- сбор (206) последующих магнитно-резонансных данных (148) посредством управления системой магнитно-резонансной томографии с помощью команд импульсной последовательности;
- реконструкция (208) одного или более последующих изображений (150) из последующих магнитно-резонансных данных;
многократно
- вычисление (210) оценки (152) расстояния между упомянутыми одним или более последующими изображениями и по меньшей мере одним из упомянутых одного или более полученных изображений, распределенных в группу памяти, для каждой из упомянутого набора групп памяти;
- распределение (214) упомянутого одного или более последующих изображений в существующую группу памяти, если оценка расстояния между по меньшей мере одним из упомянутых одного или более полученных изображений, распределенных в существующую группу памяти, и упомянутым одним или более последующими изображениями находится в пределах предварительно заданного диапазона,
- создание (216) дополнительной группы (304) памяти в памяти, если упомянутое одно или более последующих изображений не распределяется в выбранную группу памяти; и
- распределение (218) упомянутого одного или более последующих изображений в дополнительную группу памяти, если дополнительная группа памяти создана.
| US 2010130849 A1, 27.05.2010 | |||
| US 5382902 A, 17.01.1995 | |||
| US 2003102864 A1, 05.06.2003 | |||
| US 20100130849 A1, 27.05.2010 | |||
| ПОДАВЛЕНИЕ АРТЕФАКТА ПРИ МНОГОКАТУШЕЧНОЙ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2007 |
|
RU2434238C2 |
| RU 2007144585 A, 10.06.2009. | |||

