Область техники, к которой относится изобретение
Изобретение относится к методам трехмерной медицинской визуализации, таким как магнитно-резонансная визуализация, позитронно-эмиссионная томография, однофотонная эмиссионная томография и компьютерная томография; в частности, к позиционированию субъекта в одном из этих методов.
Уровень техники
В методах трехмерной визуализации, таких как магнитно-резонансная визуализация, позитронно-эмиссионная томография, однофотонная эмиссионная томография и компьютерная томография, субъекта приводят в положение, при котором система медицинской визуализации способна осуществлять получение данных медицинской визуализации, описывающих трехмерную область субъекта в области визуализации. Поэтому для получения надлежащего изображения субъекта важно иметь возможность идентифицировать участок субъекта, изображение которого надо получить, и поместить этот участок в пределы области визуализации.
В публикации заявки на патент США US 2013/0342851 А1 раскрыт способ получения информации, относящейся к по меньшей мере одному субъекту, находящемуся на устройстве позиционирования субъекта медицинского устройства визуализации. Способ включает в себя следующие этапы: с помощью оптических средств получают данные трехмерного изображения, относящиеся к объекту, находящемуся на устройстве позиционирования объекта, посредством блока записи данных трехмерного изображения; переносят полученные данные трехмерного изображения из блока записи данных трехмерного изображения в блок оценки; посредством блока оценки определяют информацию, относящуюся к объекту, находящемуся на устройстве позиционирования объекта, на основании данных трехмерного изображения; генерируют выходную информацию на основании определенной информации, относящейся к объекту, находящемуся на устройстве позиционирования объекта; и выдают выходную информацию, относящуюся к объекту, находящемуся на устройстве позиционирования пациента.
Раскрытие сущности изобретения
В настоящем изобретении обеспечены медицинское устройство, компьютерный программный продукт и способ согласно независимым пунктам формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Варианты осуществления изобретения могут обеспечивать медицинское устройство, содержащее опору субъекта и камеру. Медицинское устройство выполнено с возможностью получения множества изображений субъекта, находящегося на опоре субъекта при множестве положений опоры субъекта. Для этого множества положений предусмотрено известное смещение между ними. Изучив множество изображений, можно рассчитать профиль высоты субъекта. Профиль высоты в контексте настоящего документа представляет собой пространственно-зависимое картирование высоты субъекта над опорой субъекта. Варианты осуществления могут обеспечить возможность использования двумерной камеры для определения профиля высоты. В других вариантах осуществления может использоваться трехмерная камера. Получение множества трехмерных изображений с помощью трехмерной камеры может обеспечить определение более точного профиля высоты.
В одном из аспектов изобретения опора субъекта и камера являются подвижными относительно друг друга, так как по меньшей мере одно из опоры субъекта и камеры или обе они могут перемещаться по линейной траектории. Опора субъекта и камера могут перемещаться между первым и вторым положением относительно друг друга. Опора субъекта и камера выполнены с возможностью измерения смещения относительно друг друга по линейной траектории между первым положением и по меньшей мере одним промежуточным положением. Каждое из по меньшей мере одного промежуточного положения находится между первым положением и вторым положением. При первом положении опоры субъекта и камеры относительно друг друга получают исходное изображение посредством камеры, а в одном или в серии промежуточных относительных положений опоры субъекта и камеры получают одно или более промежуточных изображений.
Исполнение машиноисполняемых инструкций дополнительно обеспечивает расчет процессором профиля высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения. Профиль высоты, по меньшей мере частично, рассчитывают с использованием смещения опоры субъекта и камеры относительно друг друга. Профиль высоты описывает пространственно-зависимую высоту субъекта над опорной поверхностью. Этот вариант осуществления может быть предпочтительным, поскольку он может обеспечивать улучшенные средства измерения профиля высоты субъекта с использованием единственной камеры.
Изобретение также относится к компьютерной программе, содержащей инструкции для получения профилей высоты из изображений, полученных при разных относительных положениях камеры и опоры субъекта.
Изобретение также относится к способу эксплуатации медицинского устройства для получения профилей высоты из изображений, полученных при разных относительных положениях камеры и опоры субъекта.
В одном из аспектов изобретения обеспечено медицинское устройство, содержащее опору субъекта, выполненную с возможностью перемещения субъекта из первого положения во второе положение по линейной траектории. Опора субъекта дополнительно содержит опорную поверхность для приема субъекта. Опора субъекта дополнительно выполнена с возможностью ее позиционирования по меньшей мере в одном промежуточном положении. Опора субъекта выполнена с возможностью измерения смещения по линейной траектории между первым положением и по меньшей мере одним промежуточным положением. Каждое из по меньшей мере одного промежуточного положения находится между первым положением и вторым положением.
Медицинское устройство дополнительно содержит камеру, выполненную с возможностью визуализации опорной поверхности в первом положении. Камера также выполнена с возможностью визуализации субъекта, находящегося на опорной поверхности. Медицинское устройство дополнительно содержит память, содержащую машиноисполняемые инструкции. Медицинское устройство дополнительно содержит процессор для управления медицинским устройством.
Исполнение машиноисполняемых инструкций дополнительно обеспечивает получение процессором исходного изображения с помощью камеры, когда опора субъекта находится в первом положении. В контексте настоящего документа исходное изображение является одним из изображений. «Исходное» в исходном изображении является меткой для идентификации конкретного изображения.
Исполнение машиноисполняемых инструкций дополнительно обеспечивает управление процессором опорой субъекта для перемещения опоры субъекта из первого положения во второе положение. Исполнение машиноисполняемых инструкций дополнительно обеспечивает получение процессором по меньшей мере одного промежуточного изображения с помощью камеры, и смещение опоры субъекта для каждого из по меньшей мере одного промежуточного изображения при перемещении опоры субъекта из первого положения во второе положение. Каждое из по меньшей мере одного промежуточного изображения является одним из изображений. «Промежуточное» в промежуточном изображении является меткой для идентификации конкретного изображения.
Может быть несколько промежуточных изображений, при этом каждое полученное промежуточное изображение соответствует или имеет привязку к положению или смещению, имевшим место у опоры субъекта.
Исполнение машиноисполняемых инструкций дополнительно обеспечивает расчет процессором профиля высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения. Профиль высоты по меньшей мере частично рассчитывают, используя смещение опоры субъекта. Профиль высоты описывает пространственно-зависимую высоту субъекта над опорной поверхностью. Этот вариант осуществления может быть предпочтительным, поскольку он может обеспечить улучшенные средства измерения профиля высоты субъекта с использованием единственной камеры.
Профиль высоты может альтернативно описываться как профиль расстояния между объектом и камерой. Например, в трехмерной визуализации исходно полученные трехмерные данные являются данными диапазона/глубины, описывающими расстояние (вдоль оптической оси) между камерой и объектом. Их можно преобразовать в профиль высоты над данной поверхностью, если известны координаты этой поверхности в системе координат камеры. Или просто взяв разницу между двумя изображениями.
В контексте настоящего документа профиль высоты может быть либо одномерным профилем субъекта, либо он может быть двумерным изображением или картированием субъекта, которое описывает расстояние субъекта с точки зрения расстояния или смещения.
В некоторых примерах медицинское устройство также может иметь калибровку в памяти. Например, для выполнения калибровки, на опорную поверхность можно поместить разграфленную бумагу или другой объект, имеющий различимый рисунок. Затем опору можно перемещать из первого положения в одно или более промежуточных положений и получать изображения. Это может использоваться для выполнения картирования перемещения поверхности от исходного изображения к промежуточным изображениям относительно опоры субъекта. Если на опорной поверхности находится субъект или другой объект, то участки субъекта или объекта будут находиться ближе к камере, чем опорная поверхность. Это может иметь эффект перемещения на бóльшее расстояние между изображениями, чем для чего-либо, что находится непосредственно на опорной поверхности и не имеет высоты.
В качестве альтернативы калибровке, предусмотренной в памяти, известны внешние параметры камеры относительно медицинского оборудования, то есть матрица вращения 3x3 и вектор перемещения 1x3, описывающие углы и положение камеры относительно базовой системы координат медицинского устройства.
Это может обеспечить преобразование координат пикселя на изображении с камеры в трехмерные координаты соответствующей точки в системе координат медицинского устройства.
В качестве дополнительной альтернативы, если камера не откалибрована относительно медицинского устройства, то профиль высоты субъекта все равно может быть получен путем обработки только изображений с камеры, однако в этом случае абсолютное положение будет неизвестно.
В другом варианте осуществления камера представляет собой двумерную камеру. Профиль высоты рассчитывают путем детектирования смещений пикселей между комбинациями исходного изображения и по меньшей мере одного промежуточного изображения. Смещения пикселей можно считать аналогичными эффекту параллакса. Комбинация может выполняться определенным образом между исходным изображением и каждым из по меньшей мере одного промежуточного изображения. Этот вариант осуществления может быть предпочтительным, поскольку он позволяет создавать профиль высоты без трехмерной камеры.
Камера, используемая в качестве двумерной камеры, в разных примерах может быть разного типа. Например, это может быть цветная камера, монохромная камера, камера видимого диапазона, инфракрасная или тепловизионная камера.
В другом варианте осуществления используют смещения пикселей для расчета профиля высоты путем деления исходного изображения и по меньшей мере одного промежуточного изображения на множество пиксельных областей. Использование смещений пикселей может дополнительно содержать идентификацию смещения каждой из пиксельных областей. Использование смещений пикселей может дополнительно включать в себя выполнение расчета профиля высоты путем сравнения смещения каждой из множества пиксельных областей со смещением опоры субъекта. Смещение опоры субъекта на изображениях, например, может быть заранее известно из калибровки или может быть заранее известно из измерения положения опоры субъекта. Разделение исходного изображения и по меньшей мере одного промежуточного изображения на разные пиксельные области может быть в некоторых примерах выполнено с использованием известных алгоритмов обработки видео и кодеков. Например, при сжатии видео обычно области изображения, которые остаются неизменными, могут быть преобразованы для уменьшения объема памяти, используемой видео. В другом примере также может использоваться вычисление диспаратности между изображениями с использованием взаимной корреляции в стереовидении. Эти известные алгоритмы можно использовать для идентификации областей исходного изображения и по меньшей мере одного промежуточного изображения и рассчитывать картирование для групп этих пиксельных областей, которые затем могут быть использованы для вычисления высоты над опорной поверхностью.
В другом варианте осуществления детектирование смещений пикселей между комбинациями исходного изображения и по меньшей мере одного промежуточного изображения используется для выполнения любого из следующих действий: уменьшение отношения сигнал-шум путем усреднения множества расчетов высоты, уменьшение скрытых областей путем использования множества расчетов высоты по различным комбинациям исходного изображения и по меньшей мере одного промежуточного изображения, идентификация и уменьшение областей с отсутствием расчета высоты путем сравнения множества расчетов высоты, а также комбинаций вышеперечисленного. Например, если выполняется более одного измерения высоты, то это множество измерений можно использовать для усреднения или других статистических методов для уменьшения шума сигнала. Аналогично, когда камера нацелена на субъекта, могут иметься участки субъекта, которые не видны при всех положениях опоры субъекта. По мере перемещения опоры субъекта, разные области субъекта могут стать видны в разные моменты времени. Посредством расчета различных комбинаций будет возможно идентифицировать области, которые скрыты при некоторых положениях, и затем скорректировать профиль. В некоторых случаях из-за освещения или из-за того, как изображение выглядит в двумерном отображении, для некоторых областей может быть невозможным идентифицировать или рассчитать их высоту. Если будет иметься большее число промежуточных положений с полученными изображениями, это может обеспечить больший объем данных, используемых для заполнения в таких областях, где отсутствуют расчеты высоты.
В другом варианте осуществления камера представляет собой трехмерную камеру. Исходное изображение - это исходное диапазонное изображение. Исходное диапазонное изображение является диапазонным изображением, а «исходное» в исходном диапазонном изображении является меткой для идентификации конкретного диапазонного изображения. Каждое из по меньшей мере одного из промежуточных изображений также является промежуточным диапазонным изображением. Каждое промежуточное диапазонное изображение является диапазонным изображением, а «промежуточное» в промежуточном диапазонном изображении является меткой, обозначающей конкретное диапазонное изображение.
Профиль высоты представляет собой комбинацию исходного изображения и по меньшей мере одного промежуточного изображения. В этом варианте осуществления используется трехмерная камера, и для улучшения качества трехмерного изображения или диапазонного изображения используются разные изображения для разных положений опоры объекта. Термины «глубинное изображение» или «диапазонное изображение» в этом применении считаются синонимами.
В другом варианте осуществления исходное изображение и по меньшей мере одно промежуточное изображение комбинируют, по меньшей мере частично, путем усреднения. Например, трехмерная камера может производить измерения различных положений опоры субъекта. Эти данные от разных положений могут быть скомбинированы и усреднены для повышения точности комбинированного изображения.
Расстояние от камеры до опорной поверхности для различных положений опоры субъекта может быть измерено заранее. Это может быть полезно для калибровки трехмерной камеры для реализации вариантов осуществления изобретения. Это также может позволить установить камеру под наклонными углами относительно линейной траектории опоры субъекта.
В другом варианте осуществления исходное изображение и по меньшей мере одно промежуточное изображение комбинируют так, чтобы устранить скрытые области из профиля высоты. Например, при разных положениях опоры субъекта не все поверхности субъекта могут быть видны камере. Получив множество изображений при разных положениях опоры субъекта, эти скрытые области из определенных изображений можно устранить путем комбинирования измерений.
В другом варианте осуществления медицинское устройство дополнительно содержит систему медицинской визуализации для получения данных медицинских изображений от области визуализации. В контексте настоящего документа данные медицинских изображений включают в себя данные, которые получены с использованием системы медицинской визуализации, описывающей субъекта. Область визуализации в контексте настоящего документа охватывает область или объем пространства, из которого система медицинской визуализации может получать данные медицинского изображения. Опора субъекта выполнена с возможностью ее перемещения в положение визуализации, причем в положении визуализации по меньшей мере часть опоры субъекта находится в области визуализации. В этом варианте осуществления опора субъекта обеспечивает возможность перемещать или по меньшей мере частично перемещать субъекта в область визуализации системы медицинской визуализации.
В другом варианте осуществления камера установлена на потолке над опорой субъекта. Это, например, может быть предпочтительным, поскольку можно установить камеру таким образом, чтобы она получала изображения, которые находятся в той же плоскости, что и смещение по линейной траектории. Это может сделать математический расчет профиля высоты более непосредственным.
В другом варианте осуществления камера имеет оптическую ось. Оптическая ось перпендикулярна линейной траектории.
В другом варианте осуществления камера установлена на системе медицинской визуализации. Это может иметь то преимущество, что установка камеры на системе медицинской визуализации уменьшает объем работ или подготовки к монтажу системы медицинской визуализации. Например, если камера установлена на самой системе медицинской визуализации, то эту камеру можно установить заранее и затем смещать вместе с системой медицинской визуализации. Если камеру устанавливают на отдельной платформе или на потолке, то на месте необходимо выполнить проводку и другие подготовительные и монтажные работы.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор подгонять модель субъекта к профилю высоты. Модель субъекта, например, может быть трехмерной или поверхностной моделью, которую можно деформировать или подогнать к профилю высоты. Также могут иметься различные регистрации, которые приложены или привязаны к модели субъекта. Таким образом, подгонка модели объекта к профилю высоты может позволить идентифицировать области, которые могут потребоваться для отображения.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять исследуемую область с использованием модели субъекта. Например, конкретный протокол визуализации может быть заинтересован в визуализации конкретной части или области тела. Согласование модели субъекта с профилем высоты может обеспечить автоматическую идентификацию этой области.
В другом варианте осуществления исполнение машиноисполняемых инструкций побуждает процессор определять исследуемую область путем выполнения распознавания ориентира на профиле высоты. Трехмерная структура профиля высоты может использоваться для идентификации участков или областей субъекта.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять опорой субъекта для перемещения исследуемой области в области визуализации.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять системой медицинской визуализации для получения данных медицинского изображения, а затем восстанавливать медицинское изображение из данных медицинского изображения.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор выполнять любое действие из следующих: использование модели субъекта и/или профиля высоты для выполнения прогнозирования столкновения с системой медицинской визуализации, расчет удельного коэффициента поглощения (SAR, от англ. specific absorption rate) или оценка удельного поглощения с использованием модели субъекта и/или профиля высоты при выполнении магнитно-резонансной визуализации, расчет высоты субъекта с использованием модели субъекта и/или профиля высоты, расчет высоты субъекта с использованием модели субъекта и/или профиля высоты, а также комбинации вышеперечисленного. Любое из вышеперечисленного может быть предпочтительным, поскольку может ускорить подготовку протокола медицинской визуализации или помочь при подготовке протокола медицинской визуализации.
В другом варианте осуществления система медицинской визуализации представляет собой систему магнитно-резонансной визуализации.
В другом варианте осуществления система медицинской визуализации представляет собой систему позитронно-эмиссионной томографии.
В другом варианте осуществления система медицинской визуализации представляет собой систему однофотонной эмиссионной томографии.
В другом варианте осуществления система медицинской визуализации представляет собой систему компьютерной томографии, или КТ-систему.
В другом варианте осуществления система медицинской визуализации представляет собой комбинированную систему позитронно-эмиссионной томографии и магнитно-резонансной визуализации.
В другом варианте осуществления система медицинской визуализации представляет собой комбинированную систему компьютерной томографии и лучевой терапии.
В другом варианте осуществления система медицинской визуализации представляет собой комбинированную систему компьютерной томографии и позитронно-эмиссионной томографии.
В другом варианте осуществления система медицинской визуализации представляет собой комбинированную систему магнитно-резонансной визуализации и лучевой терапии.
В другом варианте осуществления исходное изображение и по меньшей мере одно промежуточное изображение получают в виде видеопотока. Например, камера может вновь и вновь получать изображения даже без остановки опоры субъекта. Изображения в видеопотоке могут быть привязаны к или проиндексированы по нему. Отдельные изображения из видеопотока могут затем использоваться для расчета профиля высоты. В некоторых случаях использование видеопотока может также помочь в расчете профиля высоты. Такая идентификация различных пиксельных областей может, например, использоваться повторно во время расчета профиля высоты.
В другом аспекте изобретение обеспечивает компьютерный программный продукт, содержащий машиноисполняемые инструкции для исполнения процессором, управляющим медицинским устройством. Медицинское устройство содержит опору субъекта, выполненную с возможностью перемещения субъекта из первого положения во второе положение по линейной траектории. Опора субъекта содержит опорную поверхность для приема субъекта. Опора субъекта дополнительно выполнена с возможностью ее позиционирования по меньшей мере в одном промежуточном положении. Опора субъекта выполнена с возможностью измерения смещения по линейной траектории между первым положением и по меньшей мере одним промежуточным положением. Каждое из по меньшей мере одного промежуточного положения находится между первым положением и вторым положением. Медицинское устройство дополнительно содержит камеру, выполненную с возможностью визуализации опоры субъекта в первом положении.
Исполнение машиноисполняемых инструкций побуждает процессор получать исходное изображение с помощью камеры, когда опора субъекта находится в первом положении. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять опорой субъекта для ее перемещения из первого положения во второе положение. Исполнение машиноисполняемых инструкций дополнительно обеспечивает получение процессором по меньшей мере одного промежуточного изображения с помощью камеры и смещение опоры субъекта в каждое из по меньшей мере одного промежуточного изображения при перемещении опоры субъекта из первого положения во второе положение. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор рассчитывать профиль высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения. Профиль высоты по меньшей мере частично рассчитывают с использованием смещения. Профиль высоты описывает пространственно-зависимую высоту субъекта над опорой субъекта.
В другом аспекте изобретение относится к способу эксплуатации медицинского устройства. Медицинское устройство содержит опору субъекта, выполненную с возможностью перемещения субъекта из первого положения во второе положение по линейной траектории. Опора субъекта содержит опорную поверхность для приема субъекта. Опора субъекта дополнительно выполнена с возможностью ее позиционирования по меньшей мере в одном промежуточном положении. Опора субъекта выполнена с возможностью измерения смещения по линейной траектории между первым положением и по меньшей мере одним промежуточным положением. Каждое из по меньшей мере одного промежуточного положения находится между первым положением и вторым положением. Медицинское устройство дополнительно содержит камеру, выполненную с возможностью визуализации опорной поверхности в первом положении. Также камера может быть выполнена с возможностью по меньшей мере частичной визуализации опорной поверхности, когда опора субъекта находится по меньшей мере в одном промежуточном положении.
Способ включает получение исходного изображения с помощью камеры, когда опора субъекта находится в первом положении. Способ дополнительно включает управление опорой субъекта для ее перемещения из первого положения во второе положение. Способ дополнительно включает в себя получение по меньшей мере одного промежуточного изображения с помощью камеры и смещение для каждого из по меньшей мере одного промежуточного изображения при перемещении опоры из первого положения во второе положение. Способ дополнительно включает расчет профиля высоты субъекта путем сравнения исходного изображения и по меньшей мере, одного промежуточного изображения. Профиль высоты, по меньшей мере частично, рассчитывают с использованием смещения. Профиль высоты описывает пространственно-зависимую высоту субъекта над опорой предмета.
Понятно, что один или более из вышеупомянутых вариантов осуществления изобретения могут быть скомбинированы, если комбинируемые варианты осуществления не являются взаимоисключающими.
Как будет понятно специалисту в данной области техники, аспекты настоящего изобретения могут быть реализованы в виде устройства, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут иметь вид полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая встроенное программное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или варианта осуществления, объединяющего аспекты программного и аппаратного обеспечения, которые в общем могут упоминаться здесь как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут иметь вид компьютерного программного продукта, реализованного в одном или более компьютерно-читаемых носителе (носителях) с компьютерно-читаемым компьютерным кодом.
Может использоваться любая комбинация одного или более компьютерно-читаемых носителей. Компьютерно-читаемый носитель может быть компьютерно-читаемым сигнальным носителем или компьютерно-читаемым носителем данных. «Компьютерно-читаемый носитель данных» в контексте настоящего документа охватывает любой материальный носитель данных, который может хранить инструкции, которые могут выполняться процессором компьютерного устройства. Компьютерно-читаемым носителем данных может быть компьютерно-читаемый постоянный (англ. non-transitory) носитель данных. Компьютерно-читаемым носителем данных также может называться физический компьютерно-читаемый носитель. В некоторых вариантах осуществления компьютерно-читаемый носитель данных также может хранить данные, к которым может обращаться процессор компьютерного устройства. Примеры компьютерно-читаемых носителей включают в себя, но не ограничиваются этим: дискету, магнитный жесткий диск, твердотельный жесткий диск, флэш-память, флэш-накопитель USB, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и файл регистра процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и цифровые универсальные диски (DVD), например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин «компьютерно-читаемый носитель» также относится к различным типам носителей записи, к которым компьютерное устройство может осуществлять доступ через сеть или канал связи. Например, данные могут быть получены через модем, Интернет или локальную сеть. Машиноисполняемый код, реализованный на компьютерно-читаемом носителе, может передаваться с использованием любого подходящего носителя, включая, но не ограничиваясь этим, беспроводную связь, проводную линию, оптоволоконный кабель, радиочастотную связь и т.д. или любую подходящую комбинацию вышеперечисленного.
Компьютерно-читаемый сигнальный носитель может включать в себя распространяемый сигнал данных с реализованным в нем машиноисполняемым кодом, например, в основной полосе частот или в виде части несущей волны. Такой распространяемый сигнал может быть любым из множества типов, включая, но не ограничиваясь этим, электромагнитный, оптический или любую подходящую их комбинацию. Компьютерно-читаемый сигнальный носитель может быть любым компьютерно-читаемым носителем, который не является компьютерно-читаемым носителем данных и который может передавать, распространять или транспортировать программу для использования или в связи с системой, аппаратурой или устройством выполнения инструкций.
«Компьютерная память» или «память» является примером компьютерно-читаемого носителя информации. Компьютерная память - это любая память, которая непосредственно доступна для процессора. «Компьютерное запоминающее устройство» или «запоминающее устройство» - это еще один пример компьютерно-читаемого носителя данных. Компьютерное запоминающее устройство может быть любым энергозависимым или энергонезависимым компьютерно-читаемым носителем данным.
«Процессор» в контексте настоящего документа включает в себя электронный компонент, который способен выполнять программу или машиноисполняемую инструкцию, или машиноисполняемый код. Указание на компьютерное устройство, содержащее «процессор», следует интерпретировать как возможно содержащее более одного процессора или процессорного ядра. Процессор может, например, быть многоядерным процессором. Процессор также может относиться к совокупности процессоров в пределах одной компьютерной системы или распределенной между несколькими компьютерными системами. Термин «компьютерное устройство» также следует интерпретировать как возможно относящееся к совокупности или сети компьютерных устройств, каждое из которых содержит процессор или процессоры. Машиноисполняемый код может выполняться несколькими процессорами, которые могут находиться в одном и том же компьютерном устройстве или даже могут быть распределены по нескольким компьютерным устройствам.
Машиноисполняемый код может содержать машиноисполняемые инструкции или программу, которая обеспечивает выполнение процессором одного из аспектов настоящего изобретения. Машиноисполняемый код для осуществления операций для аспектов настоящего изобретения может быть написан на любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ или тому подобное, и обычные процедурные языки программирования, такие как язык программирования C или подобные языки программирования, и скомпилирован в машиноисполняемые инструкции. В некоторых случаях машиноисполняемый код может быть в виде языка высокого уровня или в предварительно скомпилированном виде и использоваться вместе с интерпретатором, который генерирует машиноисполняемые инструкции «на лету».
Машиноисполняемый код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, в виде отдельного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя через любой тип сети, включая локальную сеть (LAN) или глобальную сеть (WAN), или может быть установлено соединение с внешним компьютером (например, через Интернет с использованием услуг интернет-провайдера).
Аспекты настоящего изобретения раскрыты со ссылкой на блок-схемы, иллюстрации и/или принципиальные схемы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Понятно, что каждый блок или часть блоков блок-схем, иллюстраций и/или принципиальных схем могут быть реализованы посредством инструкций компьютерной программы в виде машиноисполняемого кода, где это применимо. Кроме того, понятно, что, где это не является взаимоисключающим, комбинации блоков в разных блок-схемах, иллюстрациях и/или принципиальных схемах могут быть объединены. Эти компьютерные программные инструкции могут быть предоставлены процессору компьютера общего назначения, компьютера специального назначения или другого программируемого устройства обработки данных, чтобы создать такую машину, чтобы инструкции, выполняемые посредством процессора компьютера или другого программируемого устройства обработки данных, обеспечивали средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или принципиальной схемы.
Эти компьютерные программные инструкции также могут храниться на компьютерно-читаемом носителе, который может компьютеру, другому программируемому устройству обработки данных или другим устройствам предписывать функционирование определенным образом, чтобы инструкции, хранящиеся на компьютерно-читаемом носителе, создавали готовый продукт, включая инструкции, которые реализуют функцию/действие, указанное в блоке или блоках блок-схемы и/или принципиальной схемы.
Компьютерные программные инструкции также можно загрузить на компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы обеспечить выполнение последовательности операций на компьютере, другом программируемом устройстве или других устройствах для получения такого компьютерно-реализуемого процесса, чтобы инструкции, выполняемые на компьютере или другом программируемом устройстве, обеспечивали процессы для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или принципиальной схемы.
В контексте настоящего документа «пользовательский интерфейс» - это интерфейс, который обеспечивает пользователю или оператору возможность взаимодействия с компьютером или компьютерной системой. «Пользовательский интерфейс» может также упоминаться как «человеко-машинный интерфейс». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или получать информацию или данные от оператора. Пользовательский интерфейс может обеспечить для компьютера прием входных сигналов от оператора и может предоставлять пользователю выходные сигналы от компьютера. Иначе говоря, пользовательский интерфейс может обеспечить оператору возможность управления или манипулирования компьютером, при этом данный интерфейс может обеспечить возможность отображения компьютером операторских управляющих или манипулирующих воздействий. Отображение данных или информации на дисплее или на графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных с помощью клавиатуры, мыши, трекбола, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, веб-камеры, гарнитуры, педалей, проводной перчатки, пульта дистанционного управления и акселерометра - все это примеры компонентов пользовательского интерфейса, обеспечивающих прием информацию или данных от оператора.
В контексте настоящего документа «аппаратный интерфейс» включает в себя интерфейс, обеспечивающий процессору компьютерной системы возможность взаимодействия с и/или управления внешним вычислительным устройством и/или аппаратурой. Аппаратный интерфейс может обеспечивать возможность отправки процессором управляющих сигналов или инструкций на внешнее вычислительное устройство и/или аппаратуру. Аппаратный интерфейс также может обеспечивать возможность процессора обмениваться данными с внешним вычислительным устройством и/или аппаратурой. Примеры аппаратного интерфейса включают в себя, но не ограничиваются этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, соединение беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, интерфейс MIDI, интерфейс аналогового ввода и интерфейс цифрового ввода.
В контексте настоящего документа термин «дисплей» или «дисплейное устройство» охватывает устройство вывода или пользовательский интерфейс, адаптированный для отображения изображений или данных. Дисплей может выводить визуальные, аудио и/или тактильные данные. Примеры отображения включают, но не ограничиваются этим: монитор компьютера, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля, катодно-лучевую трубку (CRT, от англ. Cathode ray tube), запоминающую электронно-лучевую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскопанельный дисплей, вакуумный флуоресцентный дисплей (VF, от англ. Vacuum fluorescent), светодиодный (LED, от англ. Light-emitting diode) дисплей, электролюминесцентный дисплей (ELD, от англ. Electroluminescent display), плазменную отображающую панель (PDP, от англ. Plasma display panel), жидкокристаллический дисплей (LCD, от англ. Liquid crystal display), дисплей на органических светодиодах (OLED, от англ. Organic light-emitting diode display), проектор и наголовный дисплей.
В контексте настоящего документа система медицинской визуализации представляет собой медицинское устройство, выполненное с возможностью получения данных медицинского изображения из области визуализации. Данные медицинского изображения представляют собой данные, которые описывают область субъекта в пределах области визуализации. Данные медицинского изображения могут быть восстановлены или отображены как одно или более медицинских изображений.
Данные магнитного резонанса (МР) определяются в настоящем документе как зарегистрированные измерения радиочастотных сигналов, испускаемых атомными спинами, с использованием антенны магнитно-резонансного устройства во время сканирования при магнитно-резонансной визуализации. Данные магнитного резонанса являются примером данных медицинского изображения. Магнитно-резонансное (МР) изображение или данные магнитно-резонансного изображения определяются в настоящем документе как восстановленная двумерная или трехмерная визуализация анатомических данных, содержащихся в данных магнитного резонанса.
Краткое описание чертежей
Нижеследующие предпочтительные варианты осуществления изобретения будут раскрыты только в качестве примера и со ссылкой на чертежи, на которых:
на фиг. 1 представлен пример медицинского устройства;
на фиг. 2 показана блок-схема, иллюстрирующая пример способа эксплуатации медицинского устройства по фиг. 1;
на фиг. 3 представлен еще один пример медицинского устройства;
на фиг. 4 представлен еще один пример медицинского устройства;
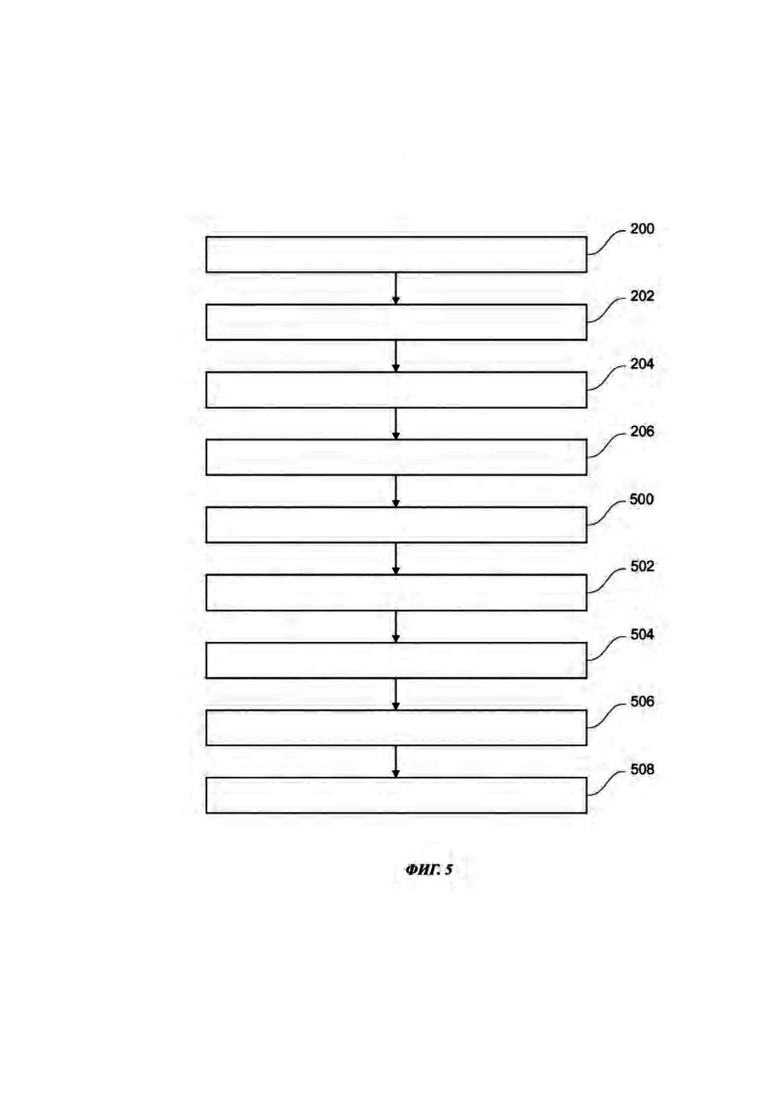
на фиг. 5 показана блок-схема, иллюстрирующая пример способа эксплуатации медицинского устройства по фиг. 4;
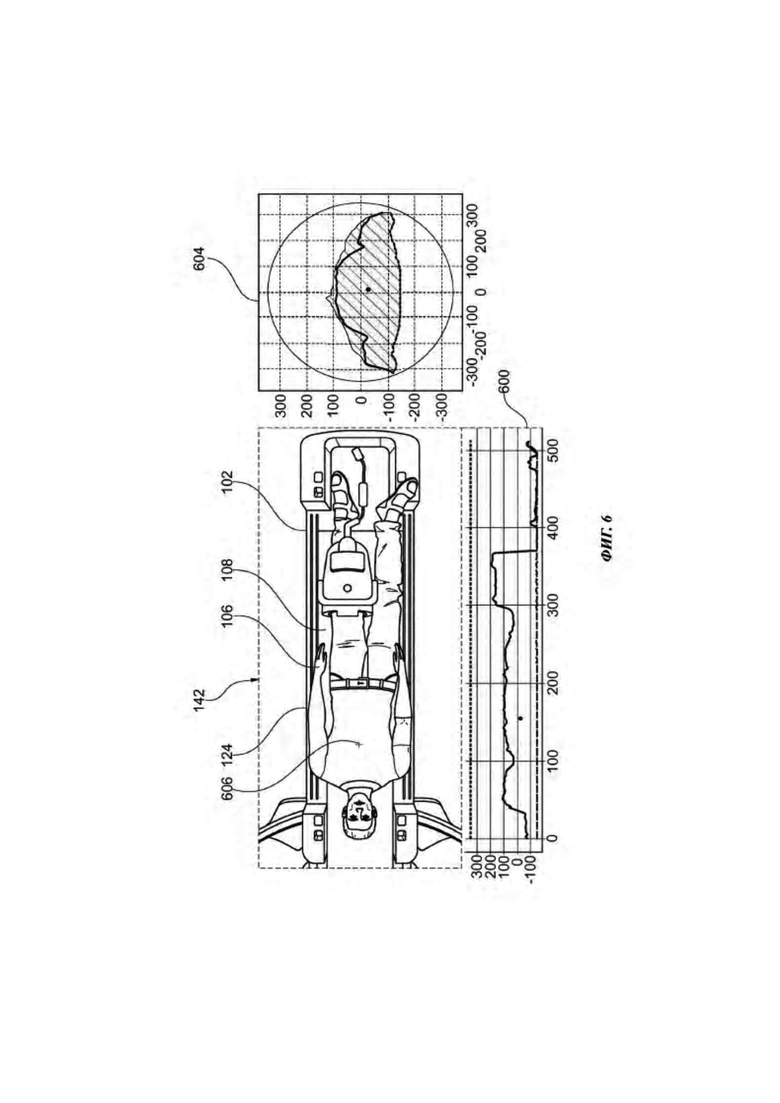
на фиг. 6 показан пример изображения субъекта на опоре субъекта, полученного с помощью камеры; и
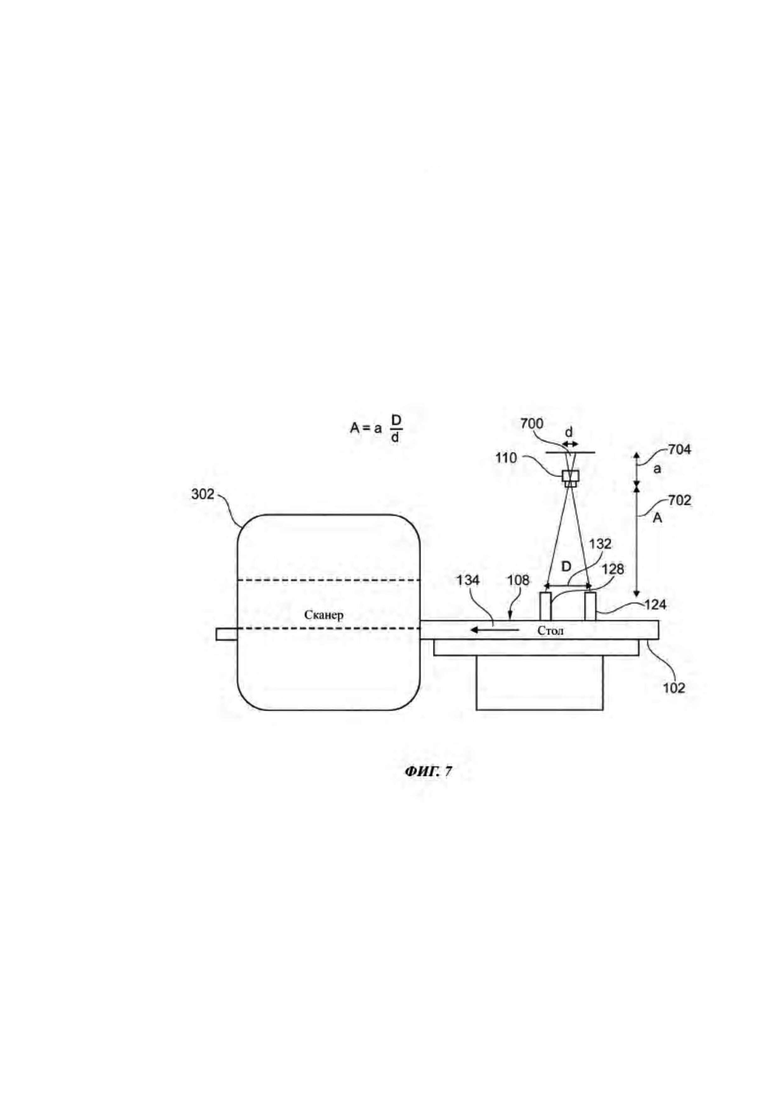
на фиг. 7 представлен еще один пример медицинского устройства, эквивалентного медицинскому устройству по фиг. 3.
Осуществление изобретения
Элементы с одинаковыми номерами на этих чертежах являются эквивалентными элементами или выполняют ту же функцию. Элементы, которые уже были рассмотрены, не обязательно будут рассматриваться на последующих чертежах, если их функция эквивалентна.
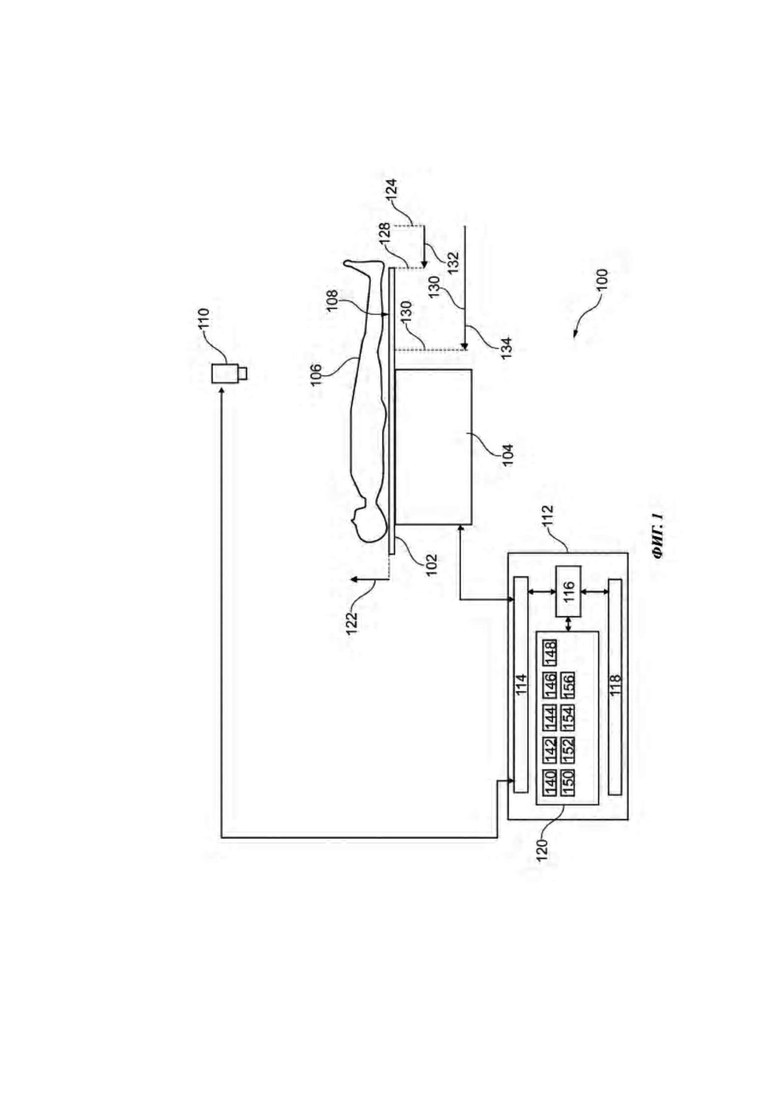
На фиг. 1 представлен пример медицинского устройства 100. Медицинское устройство показано содержащим опору 102 субъекта. Опора 102 субъекта содержит исполнительный механизм 104, выполненный с возможностью перемещения опоры 102 субъекта на управляемое расстояние или смещения по линейной траектории 134. Субъект 106 находится на опорной поверхности 108. Опорная поверхность 108 обращена к камере 110. Камера 110 может получать изображения опорной поверхности 108 и/или субъекта 106, когда опора 102 субъекта находится в различных положениях. Также показано, что медицинское устройство 100 содержит компьютер 112. Компьютер 112 содержит аппаратный интерфейс 114, обеспечивающий возможность взаимодействия процессора 116 с другими компонентами медицинского устройства 100 и управления ими.
В частности, на этом чертеже аппаратный интерфейс 114 показан взаимодействующим с камерой 110 для получения изображений и с исполнительным механизмом 104 для управления положением опоры 102 субъекта. В других примерах или вариантах осуществления аппаратный интерфейс 114 может использоваться для управления дополнительными компонентами.
Процессор 116 связан с аппаратной системой 142, памятью 120 и пользовательским интерфейсом 118. Память 120 может быть любой комбинацией памяти, которая доступна для процессора 1116. Она может включать в себя такие элементы как основную память, кэшированную память, а также энергонезависимую память, такую как флэш-RAM, жесткие диски или другие запоминающие устройства. В некоторых примерах память 1120 может рассматриваться как постоянный компьютерно-читаемый носитель информации.
Стрелка 122 указывает высоту или расстояние над опорной поверхностью 108. Пунктирная линия 124 указывает местоположение края опоры 102 субъекта, когда она находится в первом положении 124. Пунктирная линия 130 указывает положение края опоры 102 субъекта, когда опора 102 субъекта находится во втором положении 130. Пунктирная линия 128 показывает текущее положение края опоры 102 субъекта. В текущий момент опора 102 субъекта находится в промежуточном положении 128. При перемещении опоры 102 субъекта с различным смещением 132, 134 относительно первого положения 124, изображения получают с помощью камеры 110. Участки субъекта 106, которые находятся ближе к камере 110, чем опорная поверхность 108, могут перемещаться больше в пределах множества изображений, чем опорная поверхность 108.
Например, на опорную поверхность 108 может быть нанесен графический или другой шаблон, при этом опорная поверхность может быть отображена во множестве положений. Это может обеспечить информацию о том, как смещения 132, 134 соотносятся с пиксельным смещением изображений опорной поверхности 108. Если субъект 106 находится на опорной поверхности 108, то пиксели, представляющие идентичные участки субъекта 106, переместятся на бóльшую величину, чем при перемещении только опорной поверхности 108. Это большее перемещение отдельных пикселей или групп пикселей может быть использовано для разработки трехмерного измерения расстояния поверхности субъекта 106 над 122 опорной поверхностью 108.
Показано, что память 120 содержит машиноисполняемые инструкции 140. Машиноисполняемые инструкции 140 позволяют процессору 116 управлять эксплуатацией и функционированием медицинского устройства 100. Также показано, что память 120 содержит исходное изображение 142, которое было получено, когда опора 102 субъекта находилась в первом положении 124. Также показано, что в памяти 120 сохранено промежуточное изображение 144. Промежуточное изображение было получено, когда опора 102 субъекта находилась в промежуточном положении 128. Изображенная на фиг. 1 опора 102 субъекта находится в промежуточном положении 128. Кроме того, показано, что память 120 дополнительно содержит смещение 146. Смещение 146, например, может быть числовой величиной, указывающей расстояние, обозначенное вектором 132.
Кроме того, показано, что память 120 содержит опциональную калибровку 148. Калибровка 148 может, например, использоваться для упрощения расчета профиля 150 высоты. Также показано, что в памяти 120 сохранен профиль 150 высоты. Профиль 150 высоты может быть рассчитан с использованием исходного изображения 142, промежуточного изображения 144 и известного смещения 146. Если создаются дополнительные промежуточные изображения 144, то для дальнейшего уточнения и улучшения определения профиля 150 высоты можно использовать различные комбинации смещений между различными комбинациями изображений. Кроме того, показано, что память 120 содержит модель 152 субъекта. Модель 152 субъекта, например, может быть объемной или поверхностной моделью, которая деформирована или подогнана к профилю 150 высоты. Модель 152 субъекта, например, может обеспечивать возможность получения полезной информации, такой как регистрация 154 для исследуемой области, или может использоваться для получения данных 156, описывающих субъекта, таких как оценка размера, высоты и/или веса.
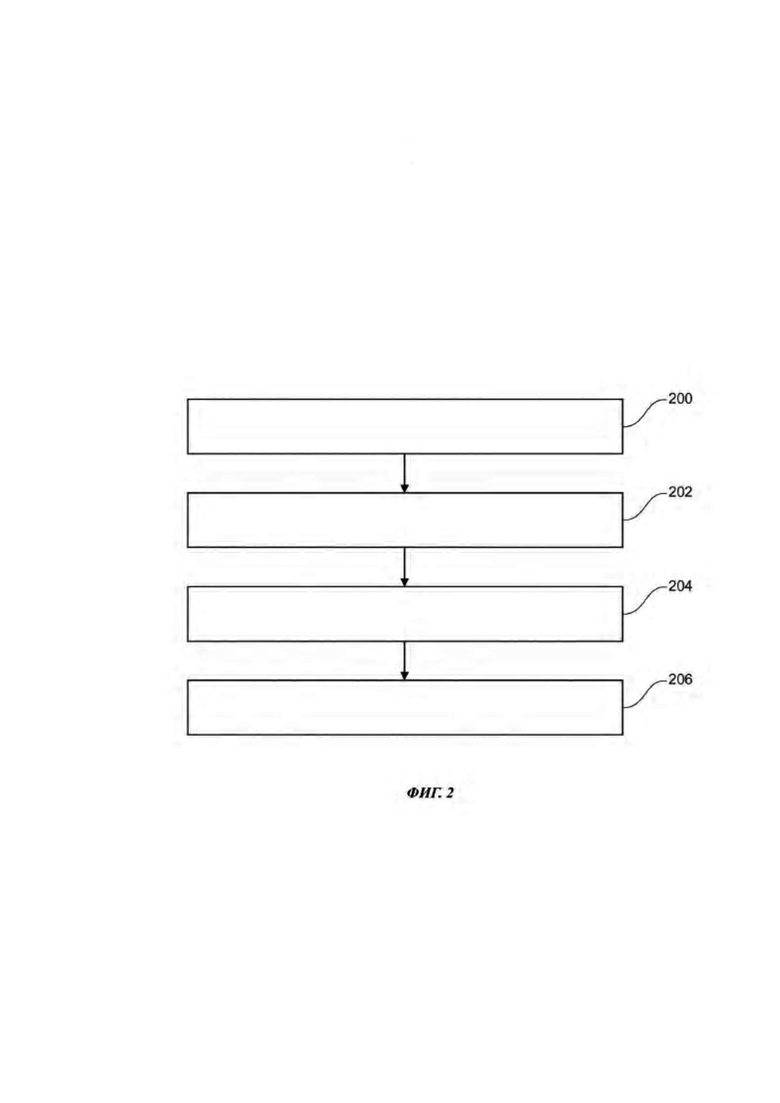
На фиг. 2 показана блок-схема, представляющая способ эксплуатации медицинского устройства 100 по фиг. 1. Сначала, на этапе 200, когда опора 102 субъекта находится в первом положении 124, камера 110 получает исходное изображение 142. Затем, на этапе 202 опору 102 субъекта перемещают из первого положения 124 во второе положение 130. При перемещении опоры 102 субъекта из первого положения 124 во второе положение 130 выполняется этап 204. На этапе 204 с помощью камеры 110 получают по меньшей мере одно промежуточное изображение 144, а также регистрируют смещение 132. Наконец, на этапе 206 рассчитывают профиль 150 высоты, путем сравнения исходного изображения 142, промежуточного изображения 144 и использования смещения 146.
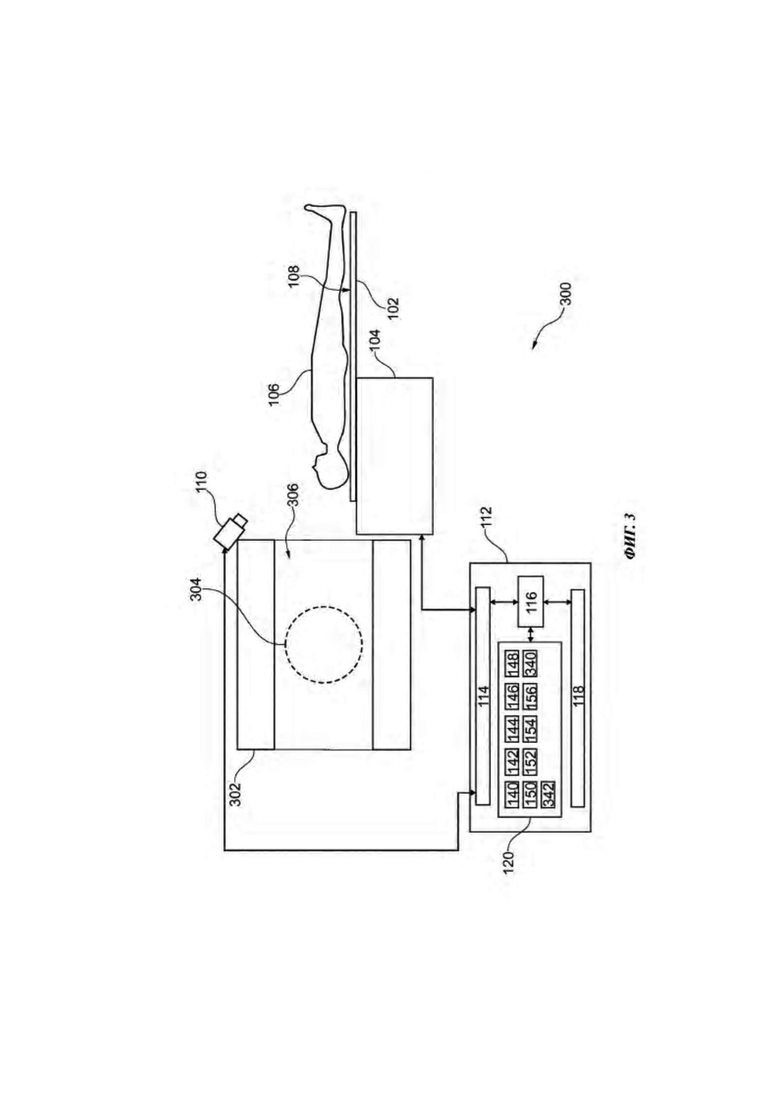
На фиг. 3 представлен еще один пример медицинского устройства 300. Медицинское устройство на фиг. 300 аналогично медицинскому устройству 100 на фиг. 1, за исключением того, что теперь дополнительно имеется система 302 медицинской визуализации. Система медицинской визуализации имеет область 304 медицинской визуализации, из которой можно получить данные медицинской визуализации. Опора 102 субъекта выполнена с возможностью перемещения по меньшей мере участка субъекта 106 в область 304 медицинской визуализации. В этом примере система 302 медицинской визуализации является цилиндрической и имеет туннель 306, в который можно переместить субъекта 106, используя опору 102 субъекта. Однако это не является необходимым, не все системы 302 медицинской визуализации должны быть цилиндрически симметричными, как показано на этом рисунке. Кроме того, следует отметить, что камера 110 теперь установлена на системе 302 медицинской визуализации и направлена наклонно под углом к опорной поверхности 108. Это может усложнить математический расчет профиля высоты 150, но имеет преимущество в том, что отсутствуют какие-либо дополнительные установочные требования для размещения камеры 110, например, на потолке. Показано, что память 120 дополнительно содержит данные 340 медицинского изображения, которые были получены, когда субъект 106 находился, по меньшей мере частично, в области 304 визуализации. Также показано, что память 120 дополнительно содержит медицинское изображение, восстановленное из данных 340 медицинского изображения.
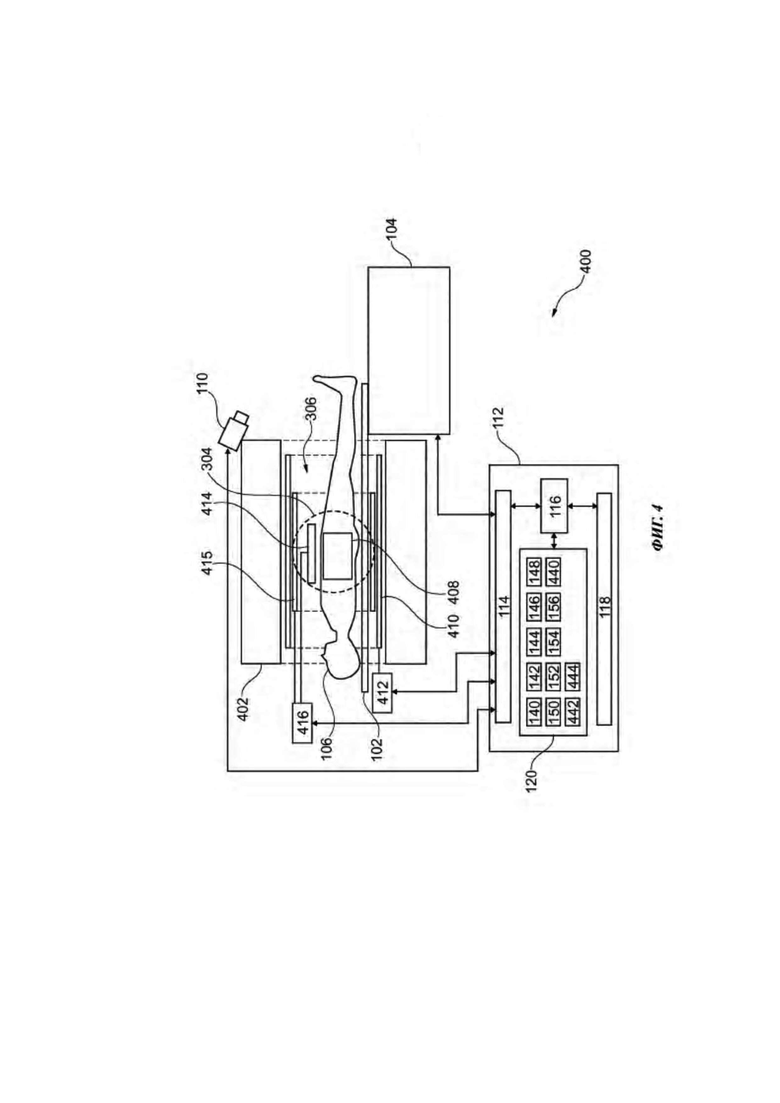
На фиг. 4 показан еще один пример медицинского устройства 400. Медицинское устройство 400 на фиг. 4 аналогично медицинскому устройству 300 на фиг. 3. Однако в этом примере система медицинской визуализации представляет собой систему 402 магнитно-резонансной визуализации. Система 402 магнитно-резонансной визуализации содержит основной магнит 404, который можно называть просто «магнитом». Магнит 404 представляет собой сверхпроводящий магнит 404 цилиндрического типа с проходящим сквозь него туннелем 306. Также возможно применение различных типов магнитов. Внутри криостата цилиндрического магнита имеется набор сверхпроводящих катушек. В туннеле 306 цилиндрического магнита 404 имеется область 304 визуализации, где магнитное поле является сильным и достаточно однородным для выполнения магнитно-резонансной визуализации.
В туннеле 406 магнита также имеется набор градиентных катушек 410 магнитного поля, используемых для получения данных магнитного резонанса для пространственного кодирования магнитных спинов в области 304 визуализации магнита 404. Градиентные катушки 410 магнитного поля подключены к источнику 412 питания градиентных катушек магнитного поля. Предполагается, что градиентные катушки 410 магнитного поля являются репрезентативными. Обычно градиентные катушки 410 магнитного поля включают в себя три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Блок питания градиента магнитного поля подает ток на градиентные катушки магнитного поля. Ток, подаваемый на градиентные катушки 410 магнитного поля, имеет управление в зависимости от времени и может изменяться линейно или импульсно.
Смежно с областью 304 визуализации расположена магнитно-резонансная катушка или антенна 414, которая действует как радиочастотная антенна для манипулирования ориентацией магнитных спинов в области 304 визуализации и для приема радиосигналов от спинов также в области 304 визуализации. Радиочастотная катушка также может представлять собой множество элементов катушки. Радиочастотная антенна также может называться каналом. Катушка 414 соединена с радиочастотным приемопередатчиком 416. Катушка 414 и радиочастотный приемопередатчик 316 могут иметь отдельные передатчики и приемники. Катушка 414 и приемопередатчик 116 образуют радиочастотную систему.
Катушка 414 может быть выполнена из множества элементов катушки, которые могут использоваться для раздельного получения данных магнитного резонанса. Следовательно, элементы катушки могут использоваться в методе магнитно-резонансной параллельной визуализации. Также показана опциональная катушка 415 для тела. Катушка 415 для тела будет полезна в методе параллельной визуализации, поскольку она может принимать полученные данные одновременно с отдельными элементами катушки и использоваться для расчета совокупности чувствительностей катушки. Данные магнитного резонанса могут быть получены из области 304 визуализации. Данные магнитного резонанса являются примером данных медицинского изображения.
В туннеле 306 магнита 404 опора 102 субъекта показана как опора для участка субъекта 106 в области 304 визуализации.
Приемопередатчик 116, исполнительный механизм опоры 104 субъекта, камера 110 и градиентный контроллер 130 показаны подключенными к аппаратному интерфейсу 114 компьютерной системы 112. В памяти 120 находятся машиноисполняемые инструкции 140. Машиноисполняемые инструкции 140 позволяют процессору управлять эксплуатацией и функционированием медицинского устройства 400, включающего в себя систему 402 магнитно-резонансной визуализации, с помощью аппаратного интерфейса 114.
Кроме того, показана компьютерная память 120, содержащая команды 440 последовательности импульсов. Команды 440 последовательности импульсов являются либо инструкциями, либо данными, которые можно преобразовать в инструкции, которые могут использоваться для управления системой 402 магнитно-резонансной визуализации для получения данных 442 магнитно-резонансной визуализации. Данные 442 магнитно-резонансной визуализации были получены путем управления системой 402 магнитно-резонансной визуализации с помощью команд 440 последовательности импульсов. Машиноисполняемые инструкции также могут позволить процессору 116 преобразовывать данные 442 магнитно-резонансной визуализации в магнитно-резонансное изображение 444. Данные 442 магнитно-резонансной визуализации являются конкретным примером данных 340 медицинского изображения. Магнитно-резонансное изображение 444 является конкретным примером медицинского изображения 342.
В области 304 визуализации находится исследуемая область 408. Исследуемая область 408, например, может быть идентифицирована с использованием регистрации исследуемой области 154. Регистрация исследуемой области 154 может использоваться для управления положением опоры субъекта 102 для размещения исследуемой области 408 в области 304 визуализации.
На фиг. 5 показана блок-схема, иллюстрирующая способ эксплуатации медицинского устройства 400 по фиг. 4. Способ по фиг. 5 аналогичен способу по фиг. 2. Этапы 200-206 выполняются так же, как в способе по фиг. 2. После этапа 206 способ переходит к этапу 500. На этапе 500 модель 152 субъекта подгоняют к профилю 150 высоты. Модель 152 субъекта может, например, представлять собой модель деформируемой формы. Далее на этапе 502 определяют исследуемую область, используя модель 152 субъекта. Например, модель субъекта может обеспечить регистрацию 154 конкретной исследуемой области. Затем на этапе 504 процессор 116 управляет исполнительным механизмом 106, чтобы переместить опору субъекта так, чтобы исследуемая область 408 находилась в области 304 визуализации. Затем на этапе 506 используют команды 440 последовательности импульсов для получения данных 442 магнитно-резонансной визуализации. Наконец, на этапе 508 данные 442 магнитно-резонансной визуализации восстанавливают в магнитно-резонансное изображение 444.
Простая двумерная (2D) камера, такая как 2D-RGB-камера, может быть размещена над столом пациента перед МР-системой в сочетании с получением нескольких цветных 2D-изображений, снятых при разных положениях стола. Используя алгоритм depth from stereo (глубина от стерео), можно генерировать информацию о глубине без использования трехмерной (3D) камеры. Цветные 2D-изображения с информацией о глубине можно использовать для нескольких улучшений рабочего процесса.
3D-камеру можно разместить над столом пациента перед магнитным туннелем. Цветное 2D-изображение в сочетании с информацией о глубине может использоваться для нескольких улучшений рабочего процесса. Можно было бы заменить лазерный световой визир и спланировать контрольное положение, кликнув на полученное изображение. В сочетании с информацией о глубине, обеспеченной 3D-датчиком, это позволяет точно определить положение целевого анатомического местоположения во всех трех направлениях.
На фиг. 6 показан пример исходного изображения 142. В этом случае исходное изображение 142 было получено с использованием цветной 2D-камеры. Несколько изображений были использованы для построения профиля высоты или трехмерного изображения. 600 показывает сагиттальное сечение профиля высоты, сделанного на основании изображения 142. Сагиттальный профиль 600 проходит через точку 606, указанную на изображении 142. 604 показывает поперечное сечение профиля высоты, частично рассчитанного на основании изображения 142. Точка 606 указывает точку, через которую проходит поперечное сечение 604.
Также могут быть разработаны другие применения, основанные на комбинации цветных и глубинных изображений. Ориентация и латеральность пациента могут быть определены автоматически путем обработки изображения. Могут быть детектированы уже установленные поверхностные катушки, и контрольная точка может быть автоматически установлена в их центр. Пределы SAR могут быть адаптированы путем включения фактических размеров тела пациента в расчеты модели SAR. Автоматическое детектирование столкновений для крупных пациентов может быть введено на основании трехмерной информации. Можно было бы показывать различную информацию в виде наложения на цветное изображение: размер планируемого поля зрения (FOV, от англ. field of view), наилучшее положение катушки, размер однородной области и т. д.
3D-камера дороже обычной 2D-видеокамеры и/или может быть недоступна без лицензионных сборов за соответствующую технологию. Для добавления информации о глубине к простому цветному 2D-изображению необходим по меньшей мере второй датчик, такой как датчик времени пролета. Пространственное разрешение датчиков глубины, как правило, намного меньше (обычно меньше 640×480 пикселей), чем у цветового датчика. Из-за необходимости использования испускающего свет источника эти датчики также связаны со значительным нагревом.
С другой стороны, точная геометрическая информация, необходимая всем вышеперечисленным применениям, может обеспечиваться только трехмерной оптической системой, а не простым цветным 2D-изображением с использованием какой-либо глубины из стереоалгоритмов. Принципиальное отличие от стандартной настройки стереовизуализации состоит в том, что здесь мы имеем не две камеры, а одна камера снимает два (или более) изображения с фиксированным смещением относительно объекта. Поэтому информацию о глубине можно вычислить только по перемещающимся участкам (все, что находится на столе). Следует отметить, что однородно окрашенные области являются сложными для стерео, поскольку не может быть установлено четкое соответствие между отдельными пикселями в обоих изображениях. Однако существует несколько способов преодоления этой проблемы. Во-первых, следует избегать однородных областей, используя текстурированную одежду и текстуры или специальные маркеры на поверхностных катушках. Если это невозможно, то могут применяться способы, использующие регуляризацию по пространственной однородности.
В некоторых примерах может использоваться простая 2D-камера, такая как датчик 2D-RGB-камеры, размещенный над столом пациента перед магнитом, в сочетании с получением нескольких цветных 2D-изображений, полученных при разных положениях стола. Камеру можно расположить так, чтобы она полностью отображала пациента, лежащего на столе во время подготовки к исследованию. После получения исходного изображения стол автоматически перемещают на фиксированное расстояние к туннелю магнита, и сразу же делают второе изображение. В идеале пациент между ними не двигался и все еще полностью виден на втором изображении. Эти два изображения можно использовать для генерирования стереоскопической информации о глубине пациента. Для повышения точности и уменьшения числа окклюзий можно использовать несколько изображений при нескольких положениях стола.
Некоторые варианты осуществления могут содержать один или более из следующих признаков:
1. Устанавливают камеру, предпочтительно - в помещении сканирования, так, чтобы она отображала все пространство, включающее в себя стол пациента и пациента, когда стол находится вне сканера.
2. Калибруют камеру относительно МР-системы: определяют внутренние параметры камеры, обеспечивающие картирование координат пикселей на изображениях, снятых камерой, и однородные координаты физических точек в системе координат камеры. Кроме того, определяют внешние параметры камеры, обеспечивающие картирование в контрольной системе координат, связанной с МР-сканером. Калибровка также может быть уже сохранена в памяти системы, и в этом случае калибровку не нужно выполнять каждый раз.
3. Получают изображение во время подготовки пациента. Получение подходящего изображения может быть инициировано либо автоматически, путем анализа видеопотока от камеры, чтобы выбрать надлежащий момент (т. е. когда пациент лежит на столе в целевом окончательном положении, но пока без дополнительных устройств, таких как прикрепленная катушка), либо выполнено вручную, как часть процесса выбора.
4. Берут по меньшей мере второе изображение при другом положении стола. Это может быть сделано путем смещения стола на фиксированную величину, либо вручную, либо автоматически. Альтернативно, это может быть обеспечено путем получения серии изображений в последовательных положениях стола при перемещении пациента в туннель.
5. Вычисляют глубину по изображению, рассчитывая для каждого пикселя пиксельный сдвиг, вызванный смещением стола между двумя изображениями. Это известно из стереоскопии, и для решения этой задачи были предложены различные алгоритмы (см. фиг. 7 ниже). Вместе с одним из цветных 2D-изображений глубина по изображению может быть представлено оператору для дальнейшего планирования. Ориентация, латеральность, размеры тела и т. д. могут быть рассчитаны в фоновом режиме.
Фиг. 7 иллюстрирует, как рассчитать высоту объекта над опорной поверхностью 108, следуя допущению или модели камеры-обскуры. Опору 102 субъекта перемещают так, что объект перемещается из исходного положения 124 в промежуточное положение 128. Это смещение опоры субъекта вызывает смещение 132 объекта. Верхний участок объекта представляет собой расстояние 702 от оптической исходной точки камеры 110 или фокусной точки камеры 110 (в модели камеры с точечным отверстием). Внутри камеры фокусное расстояние обозначено 704. Это расстояние между объективом и ПЗС (прибором с зарядовой связью). Из этого рисунка видно, что расстояние по высоте объектов приведет к другому смещению 700. Это можно использовать для определения профиля высоты. На фиг. 7 пиксельный сдвиг d 700, вызванный известным смещением D 132 стола, пропорционален расстоянию A 702 между фокусной точкой камеры и объектом. Параметр а 704 - это расстояние между местом съемки камеры и фокусом.
Хотя изобретение было проиллюстрировано и подробно раскрыто на чертежах и в вышеприведенном описании, такое иллюстрирование и описание следует рассматривать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления.
Другие модификации раскрытых вариантов осуществления могут быть понятны специалистам в данной области техники и осуществлены ими на практике на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а употребление единственного числа не исключает множества. Один процессор или другой узел может выполнять функции нескольких элементов, указанных в формуле изобретения. Сам факт того, что определенные признаки изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих признаков не может быть успешно использована. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый в комплекте или как часть другого аппаратного обеспечения, но также может распространяться по-другому, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие его объем.
ПЕРЕЧЕНЬ НОМЕРОВ ПОЗИЦИЙ
100 - медицинское устройство
102 - опора субъекта
104 - исполнительный механизм
106 - субъект
108 - опорная поверхность
110 - камера
112 - компьютер
114 - аппаратный интерфейс
116 - процессор
118 - пользовательский интерфейс
120 - память
122 - высота над опорной поверхностью
124 - положение опоры субъекта в первом положении
126 - положение опоры субъекта во втором положении
128 - положение опоры субъекта в промежуточном положении
130 - смещение между опорой субъекта в первом и втором положениях
132 - смещение между опорой субъекта в первом и промежуточном положении
134 - линейная траектория
140 - машиноисполняемые инструкции
142 - исходное изображение
144 - промежуточное изображение
146 - смещение
148 - калибровка
150 - профиль высоты
152 - модель субъекта
154 - регистрация исследуемой области
156 - данные, описывающие субъекта
200 - получение исходного изображения с помощью камеры, когда опора субъекта находится в первом положении
202 - управление опорой субъекта для перемещения опоры субъекта из первого положения во второе положение
204 - получение по меньшей мере одного промежуточного изображения с помощью камеры и смещения для каждого из по меньшей мере одного промежуточного изображения, когда опора субъекта перемещается из первого положения во второе положение
206 - расчет профиля высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения, при этом профиль высоты по меньшей мере частично рассчитывают с использованием смещения
300 - медицинское устройство
302 - система медицинской визуализации
304 - область визуализации
306 - туннель системы медицинской визуализации
340 - данные медицинского изображения
342 - медицинское изображение
400 - медицинское устройство
402 - магнитно-резонансная система
404 - основной магнит
406 - туннель магнита
408 - исследуемая область
410 - градиентные катушки магнитного поля
412 - источник питания градиентных катушек
414 - катушка
415 - катушка для тела
416 - приемопередатчик
440 - команды последовательности импульсов
442 - данные магнитно-резонансной визуализации
444 - магнитно-резонансное изображение
500 - подгонка модели субъекта к профилю высоты
502 - определение исследуемой области с использованием модели субъекта
504 - управление опорой субъекта для перемещения исследуемой области в пределах области визуализации
506 - получение данных магнитно-резонансной визуализации
508 - восстановление данных магнитно-резонансной визуализации в магнитно-резонансное изображение
600 - сагиттальное сечение профиля высоты
604 - поперечное сечение профиля высоты
606 - место в изображении
700 - смещение в изображении
702 - расстояние между объективом камеры и объектом
704 - расстояние между объективом камеры и ПЗС
Группа изобретений относится к медицинской технике и обеспечивает медицинское устройство и способ трехмерной визуализации. Устройство содержит опору субъекта, выполненную с возможностью перемещения субъекта из первого положения во второе положение по линейной траектории и с возможностью ее позиционирования по меньшей мере в одном промежуточном положении. Опора субъекта выполнена с возможностью измерения смещения по линейной траектории между первым положением и по меньшей мере одним промежуточным положением. Медицинское устройство дополнительно содержит камеру, выполненную с возможностью визуализации опорной поверхности в первом положении. Исполнение машиноисполняемых инструкций побуждает процессор, управляющий медицинским устройством, получать исходное изображение с помощью камеры, когда опора субъекта находится в первом положении, управлять опорой субъекта для ее перемещения из первого положения во второе положение, получать по меньшей мере одно промежуточное изображение и смещение для каждого из по меньшей мере одного промежуточного изображения и рассчитывать профиль высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения. 3 н. и 12 з.п. ф-лы, 7 ил.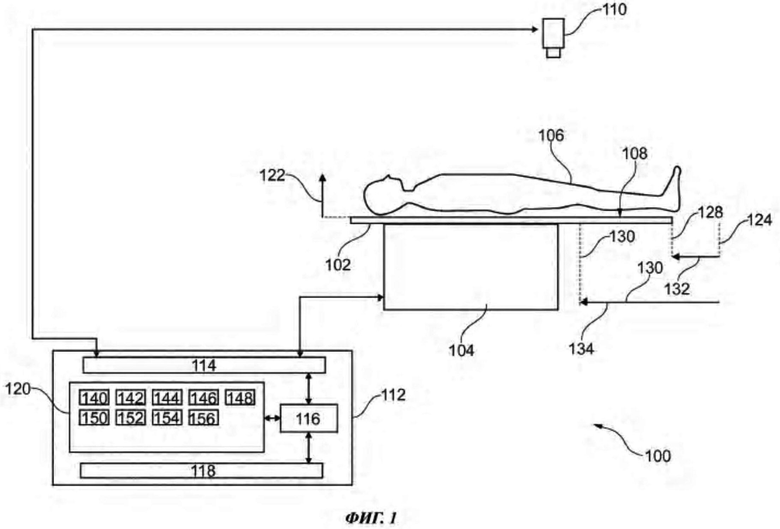
1. Медицинское устройство трехмерной визуализации, содержащее:
- опору (102) субъекта для приема субъекта;
- камеру (110), выполненную с возможностью визуализации опорной поверхности;
- при этом опора субъекта и камера выполнены с возможностью перемещения относительно друг друга по линейной траектории между первым положением, промежуточным положением и вторым положением, причем каждое из одного или более промежуточных положений находится между первым положением и вторым положением; причем
- медицинское устройство выполнено с возможностью измерения смещения (132) опоры субъекта и камеры по линейной траектории между первым положением и по меньшей мере одним промежуточным положением;
- память (120), содержащую машиноисполняемые инструкции (140);
- процессор (116) для управления медицинским устройством, причем при исполнении машиноисполняемых инструкций предусмотрена возможность выполнения процессором:
- получения (200) исходного изображения (142) с помощью камеры, когда опора субъекта и/или камера находятся в первом положении относительно друг друга;
- управления (202) опорой субъекта для перемещения по меньшей мере одного из опоры субъекта и камеры из первого положения во второе положение относительно друг друга;
- получения (204) по меньшей мере одного промежуточного изображения (144) с помощью камеры;
- измерения смещения опоры субъекта и камеры для каждого из по меньшей мере одного промежуточного изображения при перемещении по меньшей мере одного из опоры субъекта и камеры из первого положения во второе положение; и
- расчета (206) профиля (150, 600, 604) высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения, при этом профиль высоты по меньшей мере частично рассчитывается с использованием указанного смещения, причем профиль высоты является описанием пространственно-зависимой высоты субъекта над опорной поверхностью.
2. Медицинское устройство по п. 1, в котором опора (102) субъекта выполнена с возможностью
- перемещения опоры (106) субъекта относительно камеры из первого положения (124) во второе положение (130) по линейной траектории (134), (108),
- позиционирования опоры субъекта в указанном по меньшей мере одном промежуточном положении (128), и
- измерения смещения (132) по линейной траектории между первым положением и по меньшей мере одним промежуточным положением.
3. Медицинское устройство по п. 1 или 2, в котором камера представляет собой двумерную камеру, причем предусмотрена возможность расчета профиля высоты путем детектирования смещений пикселей между комбинациями исходного изображения и по меньшей мере одного промежуточного изображения.
4. Медицинское устройство по п. 3, в котором предусмотрена возможность использования смещений пикселей для расчета профиля высоты посредством:
- деления исходного изображения и по меньшей мере одного промежуточного изображения на пиксельные области;
- идентификации смещения каждой из пиксельных областей; и
- расчета профиля высоты путем сравнения смещения каждой из пиксельных областей со смещением опоры субъекта.
5. Медицинское устройство по п. 3 или 4, в котором предусмотрена возможность использования детектирования смещений пикселей между комбинациями исходного изображения и по меньшей мере одного промежуточного изображения для выполнения любого действия из следующих:
- уменьшение отношения сигнал/шум путем усреднения расчетов высоты;
- уменьшение скрытых областей с использованием расчетов высоты различных комбинаций исходного изображения и по меньшей мере одного промежуточного изображения;
- идентификация и уменьшение областей с отсутствием расчета высоты путем сравнения расчетов высоты; и
- комбинаций вышеперечисленного.
6. Медицинское устройство по п. 1 или 2, в котором камера представляет собой трехмерную камеру, причем исходное изображение представляет собой первое диапазонное изображение, при этом каждое из по меньшей мере одного промежуточного изображения представляет собой промежуточное диапазонное изображение, причем профиль высоты представляет собой комбинацию исходного изображения и по меньшей мере одного промежуточного изображения.
7. Медицинское устройство по п. 6, в котором исходное изображение и по меньшей мере одно промежуточное изображение скомбинированы, по меньшей мере частично, путем усреднения.
8. Медицинское устройство по п. 7, в котором исходное изображение и по меньшей мере одно промежуточное изображение скомбинированы так, чтобы устранить скрытые области из профиля высоты.
9. Медицинское устройство по любому из предыдущих пунктов, в котором данное медицинское устройство дополнительно содержит систему (302, 402) медицинской визуализации для получения данных (340, 442) медицинского изображения из области (308) визуализации, причем опора субъекта выполнена с возможностью ее перемещения в положение визуализации, при этом на участке визуализации по меньшей мере участок опорной поверхности находится в пределах области визуализации.
10. Медицинское устройство по п. 9, в котором при исполнении машиноисполняемых инструкций предусмотрена возможность выполнения процессором:
- подгонки (500) модели субъекта (152) к профилю высоты;
- определения (502) исследуемой области (408) с использованием модели субъекта; и
- управления (504) опорой субъекта для перемещения исследуемой области в пределах области визуализации.
11. Медицинское устройство по п. 10, в котором при исполнении машиноисполняемых инструкций дополнительно предусмотрена возможность выполнения процессором любого действия из следующих: использование модели субъекта для выполнения прогнозирования столкновения с системой медицинской визуализации, расчет оценки удельного коэффициента поглощения (SAR) с использованием модели субъекта, расчет веса субъекта с использованием модели субъекта, расчет высоты субъекта с использованием модели субъекта, а также комбинации вышеперечисленного.
12. Медицинское устройство по любому из пп. 9, 10, в котором система медицинской визуализации является любой из следующих: система (402) магнитно-резонансной визуализации, система позиционной эмиссионной томографии, система однофотонной эмиссионной томографии, система компьютерной томографии, комбинированная система позитронно-эмиссионной томографии и магнитно-резонансной визуализации, комбинированная система позитронно-эмиссионной томографии и компьютерной томографии, комбинированная система компьютерной томографии и лучевой терапии, комбинированная система компьютерной томографии и позитронно-эмиссионной томографии и комбинированная система магнитно-резонансной визуализации и лучевой терапии.
13. Медицинское устройство по любому из предыдущих пунктов, в котором исходное изображение и по меньшей мере одно промежуточное изображение получено в виде видеопотока.
14. Компьютерно-читаемый носитель, содержащий компьютерный программный продукт, содержащий машиноисполняемые инструкции (140) для исполнения процессором (116), управляющим медицинским устройством (100, 300, 400), причем медицинское устройство содержит (i) опору (102) субъекта для приема субъекта и (ii) камеру (110), выполненную с возможностью визуализации опорной поверхности, причем опора субъекта и камера выполнены с возможностью перемещения относительно друг друга по линейной траектории между первым положением, промежуточным положением и вторым положением, причем каждое из одного или более промежуточных положений находится между первым положением и вторым положением; причем при исполнении машиноисполняемых инструкций предусмотрена возможность выполнения процессором:
- получения (200) исходного изображения (142) с помощью камеры, когда опора субъекта и камера находятся в первом положении относительно друг друга;
- управления (202) медицинским устройством для перемещения по меньшей мере одного из опоры субъекта и камеры из первого положения во второе положение относительно друг друга;
- получения (204) по меньшей мере одного промежуточного изображения (144) с помощью камеры, когда опора субъекта и камера находятся по меньшей мере в одном промежуточном положении относительно друг друга; и
- измерения смещения опоры субъекта и камеры для каждого из по меньшей мере одного промежуточного изображения при перемещении по меньшей мере одного из опоры субъекта и камеры из первого положения во второе положение; и
- расчета (206) профиля (150) высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения, при этом профиль высоты по меньшей мере частично рассчитывается с использованием указанного смещения, причем профиль высоты является описанием пространственно-зависимой высоты субъекта над опорной поверхностью.
15. Способ эксплуатации медицинского устройства трехмерной визуализации, в котором медицинское устройство содержит (i) опору (102) субъекта для приема субъекта и (ii) камеру (110), выполненную с возможностью визуализации опорной поверхности, причем опора субъекта и камера выполнены с возможностью перемещения относительно друг друга по линейной траектории между первым положением, промежуточным положением и вторым положением, причем каждое из одного или более промежуточных положений находится между первым положением и вторым положением; причем способ включает следующие этапы:
- получают (200) исходное изображение (142) с помощью камеры, когда опора субъекта и камера находятся по меньшей мере в одном промежуточном положении относительно друг друга;
- управляют (202) опорой субъекта для перемещения по меньшей мере одного из опоры субъекта и камеры из первого положения во второе положение относительно друг друга;
- получают (204) по меньшей мере одно промежуточное изображение (144) с помощью камеры, когда опора субъекта и камера находятся по меньшей мере в одном промежуточном положении относительно друг друга;
- измеряют смещение опоры субъекта и камеры для каждого из по меньшей мере одного промежуточного изображения при перемещении по меньшей мере одного из опоры субъекта и камеры из первого положения во второе положение; и
- рассчитывают (206) профиль (150) высоты субъекта путем сравнения исходного изображения и по меньшей мере одного промежуточного изображения, при этом профиль высоты по меньшей мере частично рассчитывают с использованием указанного смещения, причем профиль высоты является описанием пространственно-зависимой высоты субъекта над опорной поверхностью.
| US 2013342851 A1, 26.12.2013 | |||
| DE 102014226756 A1, 03.03.2016 | |||
| US 2011154569 A1, 30.06.2011 | |||
| СПОСОБ ПРЕДСТАВЛЕНИЯ ИСХОДНОЙ ТРЕХМЕРНОЙ СЦЕНЫ ПО РЕЗУЛЬТАТАМ СЪЕМКИ ИЗОБРАЖЕНИЙ В ДВУМЕРНОЙ ПРОЕКЦИИ (ВАРИАНТЫ) | 2010 |
|
RU2453922C2 |
| WO 2013175228 A1, 28.11.2013. | |||

