ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к магнитно-резонансной визуализации, в частности, к удалению артефактов при осуществлении протоколов магнитно-резонансной визуализации по методу SENSE.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Большое статическое магнитное поле используется сканерами магнитно-резонансной визуализации (МРТ) для выравнивания ядерных спинов атомов в рамках процедуры создания изображений внутренней части тела пациента. Это большое статическое магнитное поле известно под названием поля B0.
Во время МРТ-сканирования радиочастотные (РЧ) импульсы, генерируемые передающей антенной или антенным элементом, вызывают возмущения в локальном магнитном поле, а РЧ сигналы, испускаемые ядерными спинами, обнаруживаются приемной антенной или массивом антенных элементов. Эти РЧ сигналы используются для построения МРТ изображений. Эти антенны или антенные элементы также можно называть катушками. Термин катушка часто используется взаимозаменяемо для описания антенны или антенного элемента. Кроме того, антенны передатчика и приемника также могут быть объединены в одну приемно-передающую антенну, которая выполняет обе функции. Понятно, что использование термина приемно-передающая антенна также относится к системам, в которых используются отдельные антенны передатчика и приемника. Передаваемое РЧ-поле называется полем B1. Во время более длительного сканирования субъект может осуществлять внутреннее или внешнее движение, которое искажает данные и приводит к изображениям с размытиями или артефактами.
SENSE - это метод параллельной обработки изображений. В параллельных методах обработки изображений для одновременного сбора данных используются несколько антенных элементов. Карты чувствительности катушек (CSM) содержат пространственную чувствительность всех антенных элементов. В этом случае «катушка» относится к антенному элементу. Карты чувствительности катушек используются для объединения данных, собранных с использованием каждого из отдельных элементов антенны, в единое составное изображение. SENSE значительно ускоряет получение магнитно-резонансного изображения. Методы реконструкции параллельной магнитно-резонансной визуализации кратко изложены в разделе 13.3 «Руководства по импульсным МРТ последовательностям» Bernstein и др. опубликованной издательством Elsevier Academic Press, 2004 (в дальнейшем Bernstein и другие).
Статья Winkelmann et. al., «Ghost artifact removal using a parallel imaging approach», Magn. Reson. Med. 2005 окт; 54 (4): 1002-9 (далее Winkelmann и другие) в журнале описывает алгоритм удаления артефакта в виде паразитного изображения, который использует параллельную визуализацию. Обобщенное SENSE построение используется для удаления дающих ореол артефактов. Обобщенная SENSE реконструкция определяется путем численного исследования различных источников, дающих ореол артефактов и ранжирование их с использованием меры совместимости. Недостатком этого метода является то, что он предполагает обработку большого количества числовых данных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к системе магнитно-резонансной визуализации, компьютерному программному продукту и способу работы системы магнитно-резонансной визуализации по независимым пунктам формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Как по достоинству оценят специалисты в данной области, аспекты настоящего изобретения могут быть осуществлены в виде устройства, способа или компьютерного программного продукта. Таким образом, аспекты настоящего изобретения могут принимать форму исключительно варианта осуществления аппаратных средств, исключительно варианта осуществления программного обеспечения (в том числе встроенного программного обеспечения, резидентного программного обеспечения, набора микрокоманд и т.д.) или варианта осуществления объединения аспектов программного обеспечения и аппаратных средств, которые, все в целом, могут указываться в настоящем документе как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут иметь форму компьютерного программного продукта, реализованного на одном или нескольких машиночитаемых носителях, имеющего исполняемый компьютером код, реализованный на нем.
Можно использовать любую комбинацию одного или нескольких машиночитаемых носителей. Машиночитаемый носитель может быть машиночитаемым сигналом среды передачи данных или машиночитаемым носителем хранения. «Машиночитаемый носитель хранения», как применяют в настоящем документе, включает в себя любой материальный носитель хранения, который может хранить инструкции, которые могут исполняться посредством процессора вычислительного устройства. Машиночитаемый носитель хранения также может называться машиночитаемым постоянным носителем хранения. Машиночитаемый носитель хранения также может называться материальным машиночитаемым носителем. В некоторых вариантах осуществления машиночитаемый носитель хранения также может хранить данные, которые могут быть доступны для процессора вычислительного устройства. Примеры машиночитаемых носителей хранения включают в себя, но не ограничиваются: дискетой, накопителем на жестком магнитном диске, твердотельным накопителем, флэш-памятью, USB флэш-накопителем, оперативное запоминающее устройство (ОЗУ), постоянным запоминающим устройством (ПЗУ), оптическим диском, магнитооптическим диском и регистровым файлом процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и компакт-диски формата DVD (DVD), например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или диски DVD-R. Термин машиночитаемый носитель хранения также относится к различным типам регистрирующих носителей информации, к которым вычислительное устройство может получить доступ через сеть или линии связи. Например, данные могут быть извлечены с помощью модема, через Интернет или по локальной областной сети. Машиноисполняемый код, реализованный на машиночитаемом носителе, может передаваться с использованием любого подходящего носителя, включая в себя, но не ограничиваясь, беспроводной связью, проводной связью, волоконно-оптическим кабелем, РЧ и т.д., или любой подходящей комбинацией вышеперечисленного.
Машиночитаемый сигнал среды передачи данных может включать в себя распространяемый сигнал данных с исполняемым компьютером кодом, реализованный в нем, например, в основной полосе частот или как часть несущей. Такой распространяемый сигнал может принимать любую из множества форм, включая в себя, но не ограничиваясь, электромагнитной, оптической или любым подходящим их сочетанием. Машиночитаемый сигнал среды передачи данных может быть любым машиночитаемым носителем, который не является машиночитаемым носителем хранения и который может взаимодействовать, распространять или доставлять программу для использования системой, аппаратом или устройством выполнения инструкций или вместе с ними.
«Память компьютера» или «память» является примером машиночитаемого носителя хранения. Память компьютера является любой памятью, которая непосредственно доступна процессору. Хранилище компьютера» или «хранилище» является еще одним примером машиночитаемого носителя хранения. Хранилище компьютера является любым энергонезависимым машиночитаемым носителем хранения. В некоторых вариантах осуществления хранилище компьютера также может быть памятью компьютера или наоборот.
«Процессор», как применяют в настоящем документе, включает в себя электронный компонент, который способен исполнить программу или машиноисполняемую инструкцию. Ссылки на вычислительное устройство, содержащее «процессор» следует интерпретировать как содержащее возможно более одного процессора или процессорных ядра. Процессор может, например, быть многоядерным процессором. Процессор может также относиться к совокупности процессоров внутри одной вычислительной системы или распределенной между несколькими вычислительными системами. Термин вычислительное устройство также следует толковать, как относящееся возможно к совокупности или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Машиноисполняемый код может выполняться несколькими процессорами, которые могут быть в одном и том же вычислительном устройстве или которые могут быть даже распределены по нескольким вычислительным устройствам.
Машиноисполняемый код может содержать машиноисполняемые инструкции или программу, которая заставляет процессор выполнять аспект настоящего изобретения. Машиноисполняемый код для осуществления операций согласно аспектам настоящего изобретения может быть записан в любой комбинации одного или нескольких языков программирования, в том числе объектно-ориентированного языка программирования, такого как Java, Smalltalk, C ++ или тому подобного, и традиционного процедурного языка программирования, такого как язык программирования «C» или аналогичных языков программирования и скомпилированного в машиноисполняемые инструкции. В некоторых случаях машиноисполняемый код может быть в виде языка высокого уровня или в предварительно скомпилированной форме и использоваться совместно с интерпретатором, который генерирует машиноисполняемые инструкции «на лету».
Машиноисполняемый код может полностью исполняться на компьютере пользователя, частично на компьютере пользователя, в виде автономного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем случае удаленный компьютер может быть подключен к компьютеру пользователя через сеть любого типа, в том числе локальную сеть (LAN) или глобальную сеть (WAN), или может быть выполнено соединение с внешним компьютером (например, через Интернет, используя поставщика услуг сети Интернет).
Аспекты настоящего изобретения описаны со ссылкой на изображения блок-схем и/или функциональные схемы способов, устройства (системы) и компьютерные программные продукты согласно вариантам осуществления изобретения. Следует понимать, что каждый блок или часть блоков на блок-схеме, изображениях и/или функциональных схемах, могут быть реализованы как инструкции компьютерной программы в виде машиноисполняемого кода, когда это применимо. Кроме того, следует понимать, что если нет взаимоисключения, комбинации блоков различных блок-схем, изображений и/или функциональных схем могут быть объединены. Эти инструкции компьютерной программы могут быть предоставлены процессору компьютера общего назначения, специализированному компьютеру или другому программируемому устройству обработки данных для создания машины, так что инструкции, которые выполняют с помощью процессора компьютера или другого программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных на блок-схеме и/или блоке или блоках функциональной схемы.
Эти инструкции компьютерной программы также могут быть сохранены на машиночитаемом носителе, который может направить компьютер, другое программируемое устройство обработки данных или другие устройства для работы определенным образом, так что инструкции, хранящиеся на машиночитаемом носителе, производят изделие производства, в том числе инструкции, которые реализуют функцию/действие, указанные в блок-схеме последовательности операций и/или блоке или блоках функциональной схемы.
Инструкции компьютерной программы также могут быть загружены в компьютер, другое программируемое устройство обработки данных или на другие устройства, чтобы вызвать ряд рабочих этапов, которые должны выполняться на компьютере, другом программируемом устройстве или других устройствах для выполнения реализованного компьютером процесса таким образом, что инструкции, которые выполняются на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, указанных в блок-схеме последовательности операций и/или блоке или блоках функциональной схемы.
«Пользовательский интерфейс», как применяют в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или вычислительной системой. «Пользовательский интерфейс» также может называться «человеко-машинным интерфейсом». Пользовательский интерфейс может предоставлять информацию или данные для оператора и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечить ввод данных от оператора, которые будут приняты компьютером и может предоставить вывод данных для пользователя с компьютера. Другими словами, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и интерфейс может дать возможность компьютеру указывать последствия операторского управления или манипулирования. Отображение данных или информации на дисплее или графическом интерфейсе пользователя является примером предоставления информации оператору. Прием данных посредством клавиатуры, манипулятора типа «мышь», шарового манипулятора, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, геймпада, веб-камеры, гарнитуры, педалей, проводных перчаток, пульта дистанционного управления и акселерометра все являются примерами компонентов пользовательского интерфейса, которые позволяют прием информации или данных от оператора.
«Аппаратный интерфейс», как применяют в настоящем документе, включает в себя интерфейс, который позволяет процессору вычислительной системы взаимодействовать с и/или управлять внешним вычислительным устройством и/или прибором. Аппаратный интерфейс может позволить процессору отправлять управляющие сигналы или инструкции внешнему вычислительному устройству и/или прибору. Аппаратный интерфейс также может дать возможность процессору обмениваться данными с внешним вычислительным устройством и/или прибором. Примеры аппаратного интерфейса включают в себя, но не ограничиваются: универсальную последовательную шину, IEEE 1394 порт, параллельный порт, 1284 IEEE порт, последовательный порт, RS-232 порт, IEEE-488 порт, соединение Bluetooth, соединение по беспроводной локальной сети, TCP/IP соединение, соединение Ethernet, интерфейс управляющего напряжения, MIDI цифровой интерфейс музыкальных инструментов, интерфейс аналогового ввода и интерфейс цифрового ввода.
«Дисплей» или «устройство отображения», как применяют в настоящем документе, охватывает устройство вывода или пользовательский интерфейс, сконфигурированный для отображения изображений или данных. Дисплей может выводить визуальные, аудио и сенсорные данные. Примеры дисплея включают в себя, но не ограничиваются: компьютерный монитор, телевизионный экран, сенсорный экран, сенсорный электронный дисплей, экран Брайля, электронно-лучевую трубку (ЭЛТ), запоминающую ЭЛТ, бистабильный дисплей, «электронную бумагу», векторный дисплей, плоскую индикаторную панель, вакуумный флуоресцентный дисплей (VF), светодиодный (LED) дисплей, электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи (OLED) на органических светодиодах, проектор и шлем виртуальной реальности.
Данные магнитного резонанса определяются в настоящем документе как записываемые измерения испускаемых атомными спинами радиочастотных сигналов, используя антенну магниторезонансного устройства во время сканирования магнитного резонанса во время сканирования магнитно-резонансной визуализации. Данные магнитного резонанса являются примером данных медицинского изображения. Изображение магнитно-резонансной визуализации(MRI) определяется здесь как реконструированное двух или трехмерное визуальное отображение анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Это визуальное отображение может быть выполнено с помощью компьютера.
В одном из аспектов изобретение относится к системе магнитно-резонансной визуализации, содержащей радиочастотную систему для сбора данных магнитного резонанса из зоны формирования изображения. Радиочастотная система содержит несколько антенных элементов. Система магнитно-резонансной визуализации дополнительно содержит память, содержащую машиноисполняемые инструкции и команды импульсной последовательности. Команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE. SENSE или способ кодирования чувствительности представляет собой хорошо известный метод реконструкции параллельной визуализации, используемый при магнитно-резонансной визуализации. Протокол SENSE рассмотрен, например, в ранее упомянутом учебнике «Handbook of MRI Pulse Sequences» Bernstein и др. в главе 13, раздел 3.
Система магнитно-резонансной визуализации дополнительно содержит процессор. Выполнение машиноисполняемых инструкций заставляет процессор управлять системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитного резонанса. Выполнение машиноисполняемых инструкций дополнительно заставляет процессор реконструировать предварительное изображение с помощью данных магнитно-резонансной визуализации. В разных примерах предварительное изображение может иметь разные формы. Например, команды импульсной последовательности могут также содержать инструкции, которые заставляют процессор управлять системой магнитно-резонансной визуализации для сбора обзорного или ориентировочного изображения перед сбором данных SENSE-изображения. В других примерах предварительное изображение может быть SENSE-изображением, реконструированным с использованием протокола SENSE-визуализации.
Выполнение машиноисполняемых инструкций также заставляет процессор вычислять аппроксимацию или сопряжение между анатомической моделью и предварительным изображением. Анатомическая модель может содержать подробные анатомические данные, которые сопрягаются с предварительным изображением или аппроксимируются к нему. В других случаях анатомической моделью может быть набор процедур или операций, которые используются для идентификации областей предварительного изображения. Например, анатомическая модель может использоваться для идентификации области на заданном расстоянии от переднего края объекта. Можно считать, что идентификация этой области является аппроксимацией или сопряжением.
Анатомическая модель может быть аппроксимацией или сопряжением с предварительным изображением. Различные типы анатомических моделей включают в себя модель, которая идентифицирует анатомические ориентиры, модель, которая использует анатомический атлас, составленный из разных объектов, и деформируемую модель формы, которая деформируется, чтобы соответствовать конкретному предварительному изображению. Анатомическая модель содержит карту вероятного движения. Карта вероятного движения может содержать данные, которые представляют вероятность того, что конкретная область, идентифицированная анатомической моделью, может находиться в движении при сборе данных магнитного резонанса. Например, область, такая как диафрагма, легкое или сердце, с большой вероятностью будет находиться в движении. В другом примере могут быть отмечены некоторые кровеносные сосуды, которые могут быть источником потенциальных артефактов потока, например, из-за нового притока крови. Это может быть выражено более высоким значением или относительным значением, чем другие области анатомической модели. В некоторых примерах карта вероятного движения может быть распределением вероятности, однако карта вероятного движения может также содержать простое задание веса, который не нормируется или не масштабируется.
Выполнение машиноисполняемых инструкций также заставляет процессор идентифицировать, по меньшей мере, один источник артефактов изображения, по меньшей мере, частично используя карту вероятного движения и аппроксимацию или сопряжение. Аппроксимация или сопряжение сопоставляет положение в анатомической модели с предварительным изображением, то есть позволяет применить карту вероятного движения к предварительному изображению. Таким образом, комбинация карты вероятного движения и аппроксимации или сопряжения позволяет идентифицировать области внутри предварительного изображения, которые могут вызывать артефакты движения или быть их источником. В некоторых примерах карта вероятного движения может применяться непосредственно к предварительному изображению для идентификации, по меньшей мере одного источника артефактов изображения. В других примерах карта вероятного движения используется как взвешивание в алгоритме поиска, который используется для идентификации, по меньшей мере, одного источника артефактов изображения.
Выполнение машиноисполняемых инструкций дополнительно заставляет процессор определять обобщенное уравнение SENSE, по меньшей мере частично, используя, по меньшей мере, один источник артефактов изображения. Во время реконструкции изображения с использованием SENSE, изображения, собранные от каждого из нескольких антенных элементов, реконструируют, а затем объединяют, развертывают в одно изображение. Обобщенное уравнение SENSE может быть представлено как линейная система уравнений, где матрица чувствительности имела свой ранг, который увеличивался при наличии дополнительных элементов для подавления или устранения артефакта, дающего ореол или движения. Например, матрица чувствительности может иметь один или несколько дополнительных столбцов. Выполнение машиноисполняемых инструкций также заставляет процессор формировать скорректированное SENSE-изображения, используя обобщенную систему уравнений SENSE. Этот вариант осуществления может иметь преимущество, предоставляя средства эффективного уменьшения эффектов артефактов изображения в реконструированных SENSE-изображениях. Это может иметь то преимущество, что предоставляет редуцированное движение благодаря предшествующим знаниям, которые включены в состав карты вероятного движения анатомической модели.
По меньшей мере, один источник артефактов изображения может в некоторых случаях считаться физическим местоположением или местоположением, которое соответствует физическому местоположению в отношении предварительного изображения или последующей реконструкции SENSE-изображения. Например, если предварительное изображение является обзорным или ориентировочным изображением, то местоположение, в частности вокселы, может отличаться, но пространственное местоположение, идентифицированное анатомической моделью, может тем не менее использоваться при реконструкции SENSE-изображения.
В другом варианте осуществления выполнение машиноисполняемых инструкций заставляет процессор реконструировать изображение, измеренное катушкой, для каждого из множества антенных элементов, используя данные магнитного резонанса. Выполнение машиноисполняемых инструкций дополнительно заставляет процессор реконструировать предварительное SENSE-изображение, используя набор чувствительностей катушек для объединения изображения, измеренного катушкой для каждого из множества антенных элементов, в соответствии с протоколом SENSE. Это может быть полезно, потому что предварительное SENSE-изображение может использоваться для идентификации, по меньшей мере, одного источника артефактов изображения.
В другом варианте осуществления предварительное SENSE-изображение формируется с использованием переопределенной реконструкции. В этом случае количество элементов с несколькими антеннами больше, чем коэффициент SENSE плюс ряд дополнительных ограничений. Например, если имеется 16 антенных элементов, коэффициент SENSE равен 3, и для каждого значения x есть 2 местоположения, идентифицированных как источник артефактов изображения, тогда SENSE-реконструкция является переопределенной, так как 16 больше 3 плюс 2.
В другом варианте осуществления предварительное изображение содержит предварительное SENSE-изображение. Другими словами, предварительное изображение может быть предварительным SENSE-изображением или предварительное SENSE-изображение может быть частью данных изображения, которые используются для создания предварительного изображения.
В другом варианте осуществления выполнение машиноисполняемых инструкций дополнительно заставляет процессор строить изображение при обратном проецировании для каждого из множества антенных элементов, используя предварительное SENSE-изображение и чувствительности катушек. В течение SENSE реконструкции отдельные изображения от каждого из антенных элементов объединяются, с использованием чувствительности катушек. При обратном проецировании предварительное SENSE-изображение или реконструированное SENSE-изображение используются вместе с чувствительностями катушек для вычисления изображения для каждого из множества антенных элементов. Если собранные данные магнитного резонанса и чувствительности катушек были идеальными, то изображение при обратном проецировании и изображение, измеренное катушкой, будут идентичными. Обычно это не так. В матрице чувствительности катушек могут быть ошибки, которые вызывают различия между изображением при обратном проецировании и изображением, измеренным катушкой. Эти ошибки могут привести к повреждению предварительного SENSE изображения или частей предварительного SENSE изображения. Таким образом, сравнение изображения при обратном проецировании для каждого из множества антенных элементов и этого изображения, измеренного катушкой, дает возможность оценить, насколько успешна SENSE реконструкция.
Выполнение машиноисполняемых инструкций дополнительно заставляет процессор сравнивать изображение при обратном проецировании с изображением, измеренным катушкой, для каждого из множества антенных элементов для идентификации набора пораженных вокселей для каждого из множества антенных элементов. Изображение при обратном проецировании можно сравнить повоксельно с изображением, измеренным катушкой. Если воксель в изображении при обратном проецировании изменяется более чем на заданное количество или согласно статистической мере от изображения, измеренного катушкой, тогда этот воксель может быть добавлен к набору пораженных вокселей. Воксель из множества пораженных вокселей является особым вокселем, который отличается на изображении при обратном проецировании и изображении, измеренном катушкой, настолько, чтобы указать, что может быть ошибка в этом вокселе или в соответствующем вокселе предварительного SENSE-изображения.
Идентификация, по меньшей мере, одного источника артефактов изображения выполняется в пространстве изображения. Идентификация, по меньшей мере, одного источника артефактов изображения выполняется, по меньшей мере, частично с использованием набора пораженных вокселей, используя, по меньшей мере, частично карту вероятного движения, и аппроксимацию или сопряжение. Набор пораженных вокселей можно, например, идентифицировать, сравнивая значения вокселей между изображением при обратном проецировании и соответствующим изображением, измеренным катушкой. Если значение определенного вокселя изменяется больше, чем на заданный порог, то он может быть добавлен к набору пораженных вокселей. Этот способ может иметь преимущество в том, что набор пораженных вокселей, карта вероятного движения и аппроксимация или сопряжение могут быть полезны для идентификации в пространстве источника артефактов, вызывавших изменения в предварительном SENSE-изображении. Например, набор пораженных вокселей может быть паразитным изображением или ореолом, вызванным движением. Комбинацию этих трех можно использовать для идентификации, по меньшей мере, одного источника артефактов изображения.
В другом варианте осуществления, по меньшей мере, один источник артефактов изображения корректируется путем численного поиска максимума меры совместимости в пределах заданной окрестности каждого из, по меньшей мере, одного источника артефактов изображения до построения скорректированного SENSE-изображения. Использование меры совместимости подробно описано у Winkelmann и др. Мера совместимости соответствует проверке совместимости, которая проиллюстрирована на Фиг. 3 у Winkelmann и др., а одним примером меры совместимости является уравнение 7 у Winkelmann и др. Трудность использования удаления артефакта в виде паразитного изображения, проиллюстрированная у Winkelmann и др., заключается в том, что оно требует чрезвычайно больших вычислительных затрат. Примеры, описанные в настоящем документе, могут иметь то преимущество, что предварительная идентификация вероятных областей движения на карте вероятного движения можно использовать для резкого ускорения численного процесса.
Мера совместимости зависит от разницы между набором пораженных вокселей в предварительном SENSE-изображении и пробном SENSE-изображении при обратном проецировании для каждого из множества антенных элементов. Пробные SENSE-изображения при обратном проецировании строятся из пробного SENSE-изображения. Пробное SENSE-изображение строится с использованием пробного уравнения SENSE. Примером пробного уравнения SENSE является уравнение 3 у Winkelman. Имеется дополнительный столбец, который был добавлен в матрицу чувствительности катушек. Однако неизвестно, откуда происходит источник ореола. По этой причине строятся различные пробные уравнения SENSE и выясняется, что ведет в максимальной мере совместимости. Настоящий вариант осуществления может иметь то преимущество, что предварительное знание того, где может быть расположен, по меньшей мере, один источник артефактов изображения, может использоваться для значительного ускорения поиска обобщенного уравнения SENSE, которое обеспечивает лучший результат. Предварительное знание выражается в терминах анатомической модели.
В другом варианте осуществления пробное уравнение SENSE которое максимизирует меру совместимости, является обобщенным уравнением SENSE.
В другом варианте осуществления выполнение машиноисполняемых инструкций дополнительно заставляет процессор модифицировать, по меньшей мере, один источник артефактов изображения путем отмечания набора пораженных вокселей на предварительном изображении. Например, если набор пораженных вокселей идентифицирует дающий ореол артефакт на изображении, тогда можно будет просто отметить набор пораженных вокселей непосредственно на предварительном изображении. Это может помочь в идентификации, по меньшей мере, одного источника артефактов изображения. В некоторых случаях карта вероятного движения также может использоваться для предоставления пробных мест для отмечания набора пораженных вокселей на предварительном изображении. Это может помочь в дальнейшем ускорении численного метода.
В другом варианте осуществления обобщенное уравнение SENSE имеет обобщенную матрицу чувствительности катушек. Обобщенная матрица чувствительности катушек выбирается так, чтобы минимизировать вклад, по меньшей мере, части по меньшей мере одного источника артефактов изображения.
Это может быть выполнено по-разному. В одном примере одну карту вероятного движения можно использовать для идентификации областей, которые входят в обобщенную SENSE реконструкцию. В одном конкретном примере предварительное изображение может быть реконструировано, а затем анатомическая модель отмечена на предварительном изображении. Затем карта вероятного движения помечается на предварительном изображении. Области выше определенного значения или порогового значения на карте вероятного движения затем идентифицируются как области или воксели в пределах предварительного изображения, которые, вероятно, являются причиной артефактов движения. Тогда вклад артефактов этих областей может быть подавлен путем добавления чувствительности этих местоположений к обобщенной матрице чувствительности катушек.
В другом варианте осуществления предварительное изображение содержит ориентировочное сканируемое изображение. В некоторых случаях использование ориентировочного сканируемого изображения может оказаться полезным. Например, ориентировочное сканируемое изображение может быть получено с помощью катушки для исследования всего тела или антенны для исследования всего тела вместо выполнения SENSE реконструкции. Менее вероятно, что ориентировочное сканируемое изображение может содержать внутри артефакты изображений. Это может быть полезно при отмечании анатомической модели.
В другом варианте осуществления, по меньшей мере, один из артефактов изображения является двумерным или трехмерным. Это может быть полезно, поскольку, например, способ, подробно описанный у Winkelmann и др., предполагает обработку настолько большого количества числовых данных, что может быть трудно вносить поправки для двумерных или трехмерных областей, вызывающих артефакты движения.
В другом аспекте изобретение относится к компьютерному программному продукту, содержащему машиноисполняемые инструкции для выполнения процессором, управляющим системой магнитно-резонансной визуализации. Система магнитно-резонансной визуализации содержит радиочастотную систему для сбора данных магнитного резонанса из зоны формирования изображения. Радиочастотная система содержит несколько антенных элементов. Выполнение машиноисполняемых инструкций заставляет процессор управлять системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитного резонанса. Команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE. Выполнение машиноисполняемых инструкций также заставляет процессор реконструировать предварительное изображение с помощью данных магнитно-резонансной визуализации. Выполнение машиноисполняемых инструкций также заставляет процессор вычислять аппроксимацию или сопряжение между анатомической моделью и предварительным изображением.
Анатомическая модель содержит карту вероятного движения. Выполнение машиноисполняемых инструкций также заставляет процессор идентифицировать, по меньшей мере, один источник артефактов изображения, по меньшей мере, частично используя карту вероятного движения и аппроксимацию или сопряжение. Выполнение машиноисполняемых инструкций также заставляет процессор определять обобщенное уравнение SENSE, по меньшей мере частично, используя, по меньшей мере, один источник артефактов изображения. Выполнение машиноисполняемых инструкций также заставляет процессор строить скорректированное SENSE-изображение, используя обобщенное уравнение SENSE. Преимущества этого обсуждались ранее.
В другом аспекте изобретение относится к способу работы системы магнитно-резонансной визуализации. Система магнитно-резонансной визуализации содержит радиочастотную систему для сбора данных магнитного резонанса от зоны формирования изображения. Радиочастотная система содержит несколько антенных элементов. Способ включает в себя этап управления системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитного резонанса. Команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE. Способ дополнительно содержит этап реконструкции предварительного изображения, используя данные магнитно-резонансной визуализации.
Способ дополнительно содержит этап вычисления аппроксимации или сопряжения между анатомической моделью и предварительным изображением. Анатомическая модель содержит карту вероятного движения. Способ дополнительно содержит стадию идентификации, по меньшей мере, одного источника артефактов изображения, по меньшей мере, частично используя карту вероятного движения и аппроксимацию или сопряжение. Способ дополнительно содержит этап определения обобщенного уравнения SENSE, по меньшей мере, частично используя, по меньшей мере, один источник артефактов изображения. Способ дополнительно содержит этап построения скорректированного SENSE-изображения по меньшей мере, частично используя обобщенное уравнение SENSE.
Следует понимать, что один или несколько указанных выше вариантов осуществления изобретения могут быть объединены при условии, что комбинированные варианты осуществления не являются взаимно исключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее только в качестве примера будут описаны предпочтительные варианты осуществления изобретения со ссылкой на чертежи, на которых:
на Фиг. 1 показан пример системы магнитно-резонансной визуализации;
на Фиг. 2 показана блок-схема, которая иллюстрирует способ работы системы магнитно-резонансной визуализации, показанной на Фиг. 1;
на Фиг. 3 показан еще один пример системы магнитно-резонансной визуализации;
на Фиг. 4 показана блок-схема, которая иллюстрирует способ работы системы магнитно-резонансной визуализации, показанной на Фиг. 3;
на Фиг. 5 показана Схема аннотированной модели тела, под руководством обобщенной SENSE реконструкции;
на Фиг. 6 схематично показано влияние движения на магнитно-резонансное изображение;
на Фиг. 7 также схематично показано влияние движения на магнитно-резонансное изображение;
на Фиг. 8 схематично показан выбор области, которая минимизируется во время обобщенной SENSE реконструкции для уменьшения артефактов движения;
на Фиг. 9 показано магнитно-резонансное изображение, которое было модифицировано для имитации движения в жировом слое; а также
на Фиг. 10 показано моделирование удаления артефактов движения из изображения, показанного на Фиг.9.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Одинаково пронумерованные элементы на этих фигурах являются эквивалентными элементами или выполняют одну и ту же функцию. Элементы, которые обсуждались ранее, не обязательно будут обсуждаться применительно к последующим фигурам, если функция эквивалентна.
На Фиг. 1 показан пример системы 100 магнитно-резонансной визуализации с магнитом 104. Магнит 104 представляет собой сверхпроводящий магнит 104 цилиндрического типа с туннелем 106 сквозь него. Можно использовать магниты различных типов, например, также можно использовать как расщепленный цилиндрический магнит, так и так называемый открытый магнит. Расщепленный цилиндрический магнит похож на стандартный цилиндрический магнит, за исключением того, что криостат был разделен на две секции, чтобы обеспечить доступ к изоплоскости магнита, такие магниты могут, например, использоваться в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две магнитных секции, одну над другой, с пространством между ними, которое достаточно велико, чтобы принять объект: расположение двух секций аналогично расположению катушки Гельмгольца. Открытые магниты популярны, потому что субъект менее ограничен. Внутри криостата цилиндрического магнита имеется набор сверхпроводящих катушек. Внутри туннеля 106 цилиндрического магнита 104 имеется зона 108 формирования изображения, где магнитное поле является сильным и однородным, чтобы осуществлять магнитно-резонансную визуализацию.
Внутри туннеля 106 магнита имеется также набор градиентных катушек 110 магнитного поля, который используется для сбора данных магнитного резонанса для пространственного кодирования магнитных спинов в зоне 108 формирования изображения магнита 104. Градиентные катушки 110 магнитного поля соединены с блоком 112 питания градиентных катушек магнитного поля. Имеется в виду, что градиентные катушки 110 магнитного поля являются относящимися к процессу образования представления. Обычно градиентные катушки 110 магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Питание для градиента магнитного поля подает ток на градиентные катушки магнитного поля. Ток, подаваемый на градиентные катушки 110 магнитного поля, управляется как функция от времени и может изменяться линейно или импульсно.
Внутри туннеля 106 магнита 104 имеется дополнительная катушка 114 для исследования всего тела. Катушку 114 для исследования всего тела можно также назвать антенной для исследования всего тела. Катушка 114 для исследования всего тела показана соединенной с приемопередатчиком 116. В некоторых вариантах осуществления катушка 114 для исследования всего тела также может быть подключена к радиочастотному усилителю и/или приемнику, однако это не показано в этом примере. Если и передатчик, и приемник соединены с катушкой 114 для исследования всего тела, может быть предусмотрено средство для переключения между режимом передачи и приема. Например, для выбора режима передачи или приема может использоваться схема с кодированными диодными штекерами. Опора 120 субъекта поддерживает субъекта 118 в зоне формирования изображения.
Приемопередатчик 122 показан соединенным с антенной 124 магнитно-резонансной визуализации. В этом примере антенна 124 магнитно-резонансной визуализации представляет собой поверхностную катушку, содержащую множество антенных элементов 126, 126', 126'', 126'''. Приемопередатчик 122 работает для отправки и приема отдельных РЧ-сигналов отдельным элементам катушки 126, 126', 126'', 126'''. В этом примере приемопередатчик 116, приемопередатчик 122 показаны как отдельные блоки. Однако в других примерах блоки 116 и 122 могут быть объединены.
Система магнитно-резонансной визуализации содержит компьютерную систему 130. Приемопередатчик 116, приемопередатчик 122 и блок питания градиентных катушек магнитного поля показаны соединенными с аппаратным интерфейсом 132 компьютера 130. Компьютер 130 дополнительно показан содержащим процессор 134, который может выполнять машиночитаемые инструкции. Компьютер 130 дополнительно показан содержащим пользовательский интерфейс 136, хранилище 138 компьютера и память 140 компьютера, которые доступны процессору 134 и подключены к нему.
Память 140 компьютера показана содержащей команды 150 импульсной последовательности. Команды импульсной последовательности содержат инструкции, которые позволяют процессору 134 управлять системой 100 магнитно-резонансной визуализации для сбора данных 152 магнитного резонанса в соответствии с протоколом SENSE. Команды импульсной последовательности могут содержать инструкции, которые позволяют процессору 134 собирать данные 152 магнитного резонанса в соответствии с более чем одним протоколом визуализации. Команды 150 импульсной последовательности позволяют процессору 134 собирать данные в соответствии с протоколом SENSE, но они также могут позволить использовать другие протоколы, такие как сбора обзорного или ориентировочного сканирования перед выполнением протокола SENSE. Хранилище 138 компьютера показано содержащим данные 152 магнитного резонанса, которые были собраны с использованием команд 150 импульсной последовательности для управления сбором.
Хранилище 138 компьютера также показано содержащим предварительное изображение 154, которое было реконструировано по данным 152 магнитного резонанса. Хранилище 138 компьютера также показано содержащим анатомическую модель 156, которая может быть аппроксимацией или сопряжением с предварительным изображением 154. Хранилище 138 компьютера также показано содержащим карту 158 вероятного движения, которая сопрягается или является частью анатомической модели 156. Хранилище 138 компьютера также показано содержащим аппроксимацию 159 или сопряжение, которое было рассчитано между предварительным изображением 154 и анатомической моделью 156. Хранилище 138 компьютера также показано содержащим местоположение источника 160 артефактов изображения, которое было определено в предварительном изображении 154. Местоположение источника 160 артефактов изображения соотносится с местоположением или набором местоположений в предварительном изображении 154. Если система 100 магнитно-резонансной визуализации должным образом откалибрована, то местоположение источника 160 артефактов изображения может также храниться в виде координат относительно субъекта 118.
Хранилище 138 компьютера также показано содержащим обобщенное уравнение SENSE 162. Обобщенное уравнение SENSE содержит один или несколько дополнительных столбцов в своей матрице чувствительности, которые используются для минимизации чувствительности результата восстановления к движению в месте происхождения артефактов изображения. Хранилище 138 также показано содержащим скорректированное SENSE-изображение 164. Память 140 компьютера показана содержащей машиноисполняемые инструкции 170. Машиноисполняемые инструкции содержат инструкции, которые позволяют процессору 134 управлять работой системы 100 магнитно-резонансной визуализации, а также выполнять реконструкцию изображения и модификации данных магнитного резонанса и магнитно-резонансных изображений. Машиноисполняемые инструкции 170 могут заставить процессор 134 выполнять реализуемый компьютером способ, как описано в любой из следующих блок-схем способа.
На Фиг. 2 показана блок-схема последовательности операций, которая иллюстрирует способ работы системы 100 магнитно-резонансной визуализации, показанной на Фиг. 1. Следующие этапы способа могут быть реализованы посредством машиноисполняемых инструкций 170, показанных на Фиг. 1.
Сначала на этапе 200 система магнитно-резонансной визуализации управляется с помощью команд 150 импульсной последовательности для сбора данных 152 магнитного резонанса. Затем на этапе 202 предварительное изображение 154 реконструируется по данным 152 магнитного резонанса. Затем на этапе 204 вычисляется аппроксимация или сопряжение между анатомической моделью 156 и предварительным изображением 154. Анатомическая модель 156 содержит карту 158 вероятного движения. На этапе 206, по меньшей мере, один источник 160 артефактов изображения идентифицируется, по меньшей мере частично, с использованием карты 158 вероятного движения и аппроксимации или сопряжения 159. Затем на этапе 208 определяется обобщенное уравнение 162, используя, по меньшей мере, частично знание, по меньшей мере, об одном источнике 160 артефактов изображения. Наконец, на этапе 210 строится скорректированное SENSE-изображение 164 в соответствии с обобщенным уравнением SENSE 162.
В одном варианте обобщенное уравнение SENSE строится путем добавления одного или нескольких дополнительных столбцов в матрицу чувствительности катушки для построения обобщенной матрицы чувствительности катушек. Обобщенная матрица чувствительности катушек выбирается так, чтобы минимизировать вклад, по меньшей мере, части, из, по меньшей мере, одного источника артефактов изображения.
На Фиг. 3 показан еще один пример системы 300 магнитно-резонансной визуализации. Система 300 аналогична системе 100, показанной на Фиг. 1. Хранилище 138 компьютера дополнительно показано содержащим изображения 302, измеренные катушкой, которые были реконструированы по данным 152 магнитного резонанса. Хранилище 138 компьютера дополнительно показывает предварительное SENSE-изображение 304, которое было построено с использованием изображений 302, измеренных катушкой, и набора чувствительностей 306 катушек, которые показаны сохраненными в памяти 140 компьютера. Набор чувствительности 306 катушек может быть известен априорно или они могут быть измерены во время этапа калибровки SENSE. Например, предварительное изображение может быть собрано с использованием катушки для исследования всего тела и использоваться для калибровки каждого из антенных элементов 126, 126', 126'', 126'''.
Хранилище 138 компьютера дополнительно показано содержащим изображения 308 при обратном проецировании, которые были рассчитаны из предварительного SENSE-изображения 304 и набора чувствительностей 306 катушек. Изображения 308 при обратном проецировании используются для создания изображений, которые показывают, что изображения 302, измеренные катушкой, будут похожи, если набор чувствительности 306 катушек был хорошо известен, а также не было никаких артефактов изображения. Изображения 308 при обратном проецировании, однако, отличаются от изображений 302, измеренных катушкой. При сравнении изображения, измеренного катушкой, и изображения при обратном проецировании для каждого из элементов 126, 126', 126'', 126''' может быть идентифицирован набор пораженных вокселей 310 для каждой катушки. Они могут использоваться для идентификации артефактов изображения в пределах изображений, измеренных катушкой. Они также могут привести к идентификации артефактов изображения в предварительном SENSE-изображении 304. Память 140 компьютера снова отображает исполняемые машиной команды 170. Исполняемые машиной команды могут, например, заставить процессор 134 выполнять компьютеризованный способ, как описано на Фиг.2, а также на следующей Фиг. 4.
На Фиг. 4 показана блок-схема, которая иллюстрирует способ, аналогичный тому, что показан на Фиг. 2. На Фиг. 4 к способу добавлен ряд дополнительных этапов. Фиг.4 начинается с этапов 200 и 202, как описано на Фиг.2. Затем на этапе 400 изображение, измеренное катушкой, реконструируется для каждого из множества антенных элементов 126, 126', 126'', 126''', используя данные 152 магнитного резонанса. Затем на этапе 402 предварительное SENSE-изображение 304 строится с использованием набора чувствительностей 306 катушек для объединения с изображением 302, измеренного катушкой, для каждого из множества антенных элементов 126, 126', 126'', 126''' согласно протоколу магнитно-резонансной визуализации по методу SENSE. В некоторых примерах предварительное SENSE-изображение 304 может быть предварительным изображением 154. В этом случае этап 204 теперь выполняется, поскольку этап 204 идентичен этапам 400 и 402.
Однако в других примерах предварительное изображение отличается или не совпадает с предварительным SENSE-изображением 304. Например, команды 150 импульсной последовательности могут заставить систему 100 магнитно-резонансной визуализации собирать обзорное или ориентировочное сканирование, и оно может тогда быть сопряжено с анатомической моделью. В других примерах изображение обзорного или ориентировочного сканирования, а также предварительное SENSE-изображение используются для сопряжения с анатомической моделью при выполнении реализуемого компьютером способа.
Как описано выше, способ может необязательно выполнять этап 204. В способе, показанном на Фиг.4 этапы 404, 406, 408 являются более подробными инструкциями того, как выполняется этап 206 на Фиг.2. Сначала на этапе 404 строится изображение при обратном проецировании для каждого из множества антенных элементов 126, 126', 126'', 126''', используя предварительное SENSE-изображение 304 и набор чувствительностей 306 катушек. Затем на этапе 406 изображение 308 при обратном проецировании сравнивается с изображением 302, измеренным катушкой, для каждого из множества антенных элементов 126, 126', 126'', 126''' для идентификации набора пораженных вокселей 310. Идентификация, по меньшей мере, одного источника артефактов изображения затем выполняется, по меньшей мере, частично с использованием набора пораженных вокселей 310 и карты 158 вероятного движения и аппроксимации или сопряжения 159. Затем на этапе 308, по меньшей мере, один источник 160 артефактов изображения корректируется путем численного поиска максимума меры совместимости в пределах заданной окрестности каждого, по меньшей мере, из одного источника артефактов изображения до построения скорректированного SENSE-изображения 164.
Например, численный метод, описанный у Winkelmann и др. может применяться, когда область поиска ограничена заданной окрестностью для конкретного вокселя. В этом случае применяется алгоритм Winkelmann и др., но область поиска значительно уменьшена использованием обработки в пространстве изображений. Это может привести к резкому увеличению вычислительной эффективности при поиске, по меньшей мере, одного источника артефактов изображения. Затем этапы 404, 406, и 408 могут численно повторяться во время процесса поиска максимума меры совместимости. Следующие этапы 208 и 210 выполняются, как описано на Фиг. 2.
SENSE является одним из методов ускорения сбора данных магнитного резонанса (МР). Чтобы облегчить раскрытие, информация о чувствительности катушки и измеренные данные должны быть доступны в качестве основных входов для алгоритма SENSE. Если чувствительность катушки идеальна, то могут возникать артефакты SENSE-изображения из-за ошибок в измеренных данных. Наиболее заметным артефактом такого рода, вызванным искажением в процессе кодирования посредством преобразования Фурье, является ореол, что приводит к смещению внешнего вида частей реального сигнала. Однако, хотя процесс кодирования посредством преобразования Фурье имеет дефекты, фактический сигнал надлежащим образом кодируется на основе чувствительности, что дает основу для идентификации и удаления дающих ореол структур, смотри статью Winkelmann и др.
Ключом этой идеи является идентификация сигнала, находящегося в группе риска, с помощью проверки совместимости и решения обобщенной задачи SENSE, в том числе смещение компонента сигнала (мнимый объект), для которого правильный источник должен быть найден в процедуре поиска, выполняемой в направлении фазового кодирования. Численная нагрузка этого поиска может быть приемлемой при одномерной субдискретизации, но становится проблематичным при двух измерениях и может приводить к ложным минимумам в некоторых плохих случаях.
В некоторых примерах идея состоит в том, чтобы включить подходящую адаптированную к пациенту модель тела в обобщенную SENSE реконструкцию, чтобы ускорить и стабилизировать поиск источника ореола путем учета определенных предварительных знаний. Основываясь на 3D-данных ориентировочного МРТ (или других изображений), полученных в начале обследования, соответствующая модель тела (или анатомическая модель) может быть адаптирована к пациенту. Модель может содержать аннотированные органы (т.е., печень, легкие и т. д.) И структуры, такие как сосуды, заполненные жидкостью камеры (сердце и т. д.), стенка грудной клетки и т. д., которые с высокой вероятностью являются источником МР-ореолов (например, из-за эффектов притока, потока, движения и т.д.). Эта модель, адаптированная к свернутым данным SENSE/данным совместимости, может направлять процедуру поиска источника ореолов, уменьшая вычислительную нагрузку и увеличивая доверие.
SENSE это способ параллельной визуализации. Если информация чувствительности катушки идеальна, качество SENSE-изображения зависит от данных измерений. Эти данные могут содержать некоторые несоответствия, например, вызванные движением, таким как движение системы в целом, поток и новая намагниченность в потоке, и т.д. которые фактически могут исказить процесс кодирования посредством преобразования Фурье. Ореол, помимо размытия, является самым заметным артефактом изображения, который не может быть устранен стандартной SENSE-реконструкцией.
Однако, было обнаружено, что ореол, хотя и сдвинут в направлении фазового кодирования (из-за искаженного процесса кодирования посредством преобразования Фурье) в конечном SENSE-изображении, надлежащим образом кодируется на основе чувствительности. Однако, его фактическое местоположение, место, откуда он появилось, неизвестно (1). Таким образом, воксели, искаженные сигналами, дающими ореол, можно найти в реконструированном SENSE-изображении, анализируя совместимость между реконструированным SENSE-изображением и лежащими в основе свернутыми данными (1). Тест на совместимость показывает ореол, потому что он подвергался воздействию другой чувствительности приемной катушки во время обнаружения сигнала по сравнению с тем, что было принято во время SENSE-реконструкции.
Чтобы удалить ореол для поврежденных вокселей, необходимо сформулировать задачу обобщенного SENSE, запрашивая дополнительный вклад сигнала; ореол - проистекание из другого места, перенос на поврежденный воксель. Результирующая модель сигнала отличается от модели обычного SENSE дополнительным членом Si,g δ, в Ур. [1] у Winkelmann и др.
Ci=∑ Si,j ρj+Si,g δ [1]
Здесь вектор С содержит измеренные свертки сигналов катушки для катушки i, данные измерений. S обозначает матрицу чувствительности, ρ - вектор, содержащий фактические сигналы вокселей, которые должны быть получены, δ - это вклад сигнала ореола, поступающего из неизвестного местоположения g, а сумма производится по всем катушкам. Эта обобщенная задача SENSE может быть поставлена только в том случае, если задача SENSE определена. Наличие одного направления фазового кодирования (2D-изображение) увеличивает ранг обобщенной матрицы SENSE на единицу (ожидается только один ореол), наличие двух направлений, как при 3D-визуализации, может приводить к двум источникам ореолов, увеличивая ранг обобщенной матрицы SENSE еще больше, и как следствие уменьшение числа обусловленности псевдообратной матрицы, давая решение, склонное к шуму. Обобщенная задача SENSE - ключевой элемент оптимизации для получения наилучшей совместимости данных (закрепляемых в качестве штрафа) с учетом потенциального местоположения g ореола. Этот поиск может быть приемлемым в одномерной субдискретизации (смотри Фиг.3a у Winkelmann и др.), но становится проблематичным при двух измерениях и может привести к ложным минимумам в некоторых плохих случаях.
На Фиг. 3a у Winkelmann и др. одномерный поиск в направлении фазового кодирования для артефактов с ореолом является 2D-визуализацией. Совместимость log(P) обобщенной SENSE-реконструкции построена как функция потенциального источника ореола δ в направлении фазового кодирования. Показаны (I, II) два разных дающих ореол вокселя на финальном SENSE-изображении. При появлении ореола (LAA - место появления артефакта на конечном изображении) проблема является сингулярной в исходном положении ореола (LAO - местонахождение источника артефакта), совместимость показывает максимум. Для ореола (I) основной максимум примерно определен, для ореола (II) проблема может быть сложнее.
Кроме того, обусловленность обратной матрицы Ур. [1] становится плохой, если источник артефакта g близок к месту I исследуемого вокселя, что затрудняет решение обобщенного SENSE.
Чтобы ускорить и стабилизировать процесс решения Ур. [1] задачи обобщенного SENSE предлагается учесть предварительные знания. Это реализуется с использованием соответствующей адаптированной к пациенту модели тела при обобщенной SENSE-реконструкции. Эта модель указывает потенциальные области риска, которые могут стать источниками дающих ореол артефактов, помогая вести поиск и исключить потенциальные ложные срабатывания.
Основываясь на 3D-данных ориентировочного МРТ, собранных в начале исследования, модель тела может быть адаптирована к конкретному пациенту, отражая основные признаки анатомии пациента и геометрии соответствующим образом. Модель содержит аннотированные органы (печень, легкие и т.д.) и структуры (как сосуды, заполненные жидкостью камеры (сердце и т.д.), стенка грудной клетки и т.д.), которые с высокой вероятностью являются источником МР-ореолов (например, из-за эффектов притока, потока, движения и т.д.).
Модели могут быть адаптированы к данным обобщенного SENSE/данным совместимости, могут направлять процедуру поиска источников ореола, уменьшая вычислительную нагрузку и увеличивая доверие.
Кроме того, адаптированная модель тела может быть полезна для управления SENSE-моделью для сигналов также в других направлениях. На основе адаптированной модели тела, могут быть идентифицированы области на картах чувствительности катушек, которые могут быть плохими. Эти области также можно добавить в виде столбцов в матрицу чувствительности, дополнительно расширяя матрицу чувствительности.
В одном примере субъекту или пациенту проводится исследование печени. Печень окружена соответствующей многоэлементной приемной катушкой, помещена в изоцентр магнита. Для планирования оценивается мультисрезовое ориентировочное сканирование или 3D сканирование с низким разрешением или другое сканирование. Затем данные отправляются алгоритму обработки изображений, который совмещает заданную модель тела соответствующей области тела с данными, используя эластичное сопряжение. Идентификация приблизительной области тела может быть выполнена автоматически или может быть контекстно-управляемой. После процесса сопряжения геометрия пациента сопоставляется с информацией о риске артефактов движения и их характере. Эта информация будет доступной для каждого вокселя внутри пациента и будет доступна для всех алгоритмов, которые будут выполняться впоследствии.
Информация о чувствительности катушки получается с помощью контрольного SENSE-сканирования. Используя массив приемников, выполняется диагностическое 3D сканирование печени с задержкой дыхания (15-20 секунд), охватывающее всю область брюшной полости. Из-за движения сердца свежая кровь накачивается в трехмерный объем, сканируется, что приводит к обусловленной эффектам притока модуляции интенсивности МР-сигнала, вызывая дающий ореол Фурье-артефакт при субдискретизированной SENSE-визуализации. Этот артефакт распространяется также во время SENSE-реконструкции на все поле обзора.
Этот артефакт идентифицируется с помощью проверки совместимости, предложенной в Winkelmann и др. Эта проверка измеряет, как измеренные, так и субдискретизированные с уменьшенным полем обзора изображения, которые соответствуют окончательным реконструированным SENSE-изображениям.
Чтобы облегчить это сравнение, окончательное SENSE-изображение проецируется обратно на отдельные изображения с уменьшенным полем обзора, измеренные катушкой для каждого канала; их разница с измеренными данными должна соответствовать уровню шума приемника и оценивается с использованием соответствующей вероятности (смотри Winkelmann и др.). Несоответствие позволяет идентифицировать поврежденные воксели, которым требуется другое решение задачи SENSE с использованием обобщенного SENSE-подхода вероятности (смотри Winkelmann и др.). Здесь вступает в игру геометрически подобранная модель, которая сокращенно иллюстрируется внизу на Фиг. 5, которая поддерживает/направляет поиск в соответствующем направлении фазового кодирования, выполняемого, чтобы найти источник ореола. Таким образом, обобщенный SENSE-подход дополняется аннотированной моделью тела, которая информирует алгоритм о том, какие пиксели на всем поле обзора (FOV) или на соответствующем выборочном FOV являются потенциальными источниками артефактов. Те и их окрестности будут исследоваться в отношении достижимой совместимости, предполагая, что они являются источником. Кроме того, информацию от модели можно использовать, чтобы дополнительно регулировать потенциальные другие решения (местоположения), чтобы избежать ложных решений.
Этот подход ускоряет алгоритм и может использоваться для предотвращения прорыва шума или ложных срабатываний.
На Фиг.5 показано идеализированное представление предварительного SENSE-изображения 304, анатомической модели 156 и исправленного SENSE-изображения 164. Предварительное SENSE-изображение 304 показывает поперечное сечение объекта и наличие ряда артефактов 500 в виде паразитного изображения аорты 502. Движение крови в аорте 502 вызывает артефакты 500 в виде паразитного изображения 500. Анатомическая модель 156 может иметь привязанную к ней карту 158 вероятного движения. На этой карте аорта 502 идентифицируется как область, которая имеет высокую вероятность возникновения дающего ореол артефакта. Затем эта модель 156 сопрягается с предварительным SENSE-изображением 304 и способ, описанный на Фиг. 3 и 4, применяется для вычисления скорректированного SENSE-изображения 164. На Фиг.5 показана схема аннотированной модели тела, направляемой обобщенной SENSE-реконструкцией. Реконструированное с помощью SENSE МР-изображение показывает дающие ореол артефакты (копия пульсирующей аорты в направлении фазового кодирования, вертикальная), которые идентифицируются с помощью проверки совместимости. Геометрически подобранная, адаптированная модель тела (средняя) показывает потенциальный источник этого дающего ореол артефакта (аорта - область высокого риска, выделенная красным цветом). Эта информация используется для руководства поиском обобщенной SENSE реконструкции, удаляющей артефакты, схематически показанные (справа).
Такая модель может, кроме того, служить многим другим целям, например:
- Специфическому планированию для органов
- Автоматическому позиционированию навигатора
- Автоматическому позиционированию объема шиммирования
- Автоматическому позиционированию при подавлении внешнего объема (REST-slab).
В МРТ часто бывает, что область, которая не имеет клинического значения, распространяет артефакты в интересные с клинической точки зрения области. Один типичный пример - аорта, которая распространяет артефакты от потока на печень; другой - это грудная клетка или сердце, которые из-за движения могут порождать артефакты над позвоночником. Например, смотри Фиг. 6 ниже. На ней схематически показан сагиттальный вид человеческого тела, содержащий позвоночник, который представляет клинический интерес, и сердце, которое не представляет интереса в этом исследовании.
На Фиг. 6 показан сагиттальный вид 600, показывающий сердце 602. Поскольку сердце перемещается, оно вызывает артефакты 604 изображения или ореолы изображений сердца 602.
В некоторых случаях, проблему можно преодолеть, разместив так называемый REST (для «Способа регионального насыщения») над проблемной (обычно движущейся) областью тела. Однако, это часто связано с ограничениями, например, области, отличные от прямолинейных слэбов, обычно трудны для реализации. Это также может иметь серьезные недостатки с точки зрения времени сканирования, достижимого времени повторения и т. д.
С большим количеством приемных элементов эта проблема может быть решена совершенно по-другому. Алгоритм комбинации катушек может быть выполнен таким образом, что результат в комбинации минимально чувствителен к области, которая, как известно, вызывает проблемы.
Это может быть сделано пользователем, указывающим область, известную как вызывающую артефакты движения. Это имеет некоторое сходство с размещением REST-слэба, которое также планируется пользователем. В качестве отличия индикация наличия движения для оптимальной синергийной комбинации может быть выполнена до или после фактического измерения (если исходные данные измерения все еще сохраняются в памяти). По этой причине этот метод называется «пост-сканирование REST».
Однако необходимость в пользовательском вводе затрудняет рабочий процесс. Поэтому целью настоящего изобретения является применение того же принципа, но без интерфейса.
В частности, при абдоминальной визуализации мы предполагаем, что артефакты движения преимущественно вызваны подкожно-жировой клетчаткой пациента. Идея состоит в том, чтобы обнаружить эту область и разработать, для процесса реконструкции, алгоритм комбинации катушек, который минимизирует чувствительность для этой области.
На Фиг.7 показана фигура, которая представляет собой абдоминальное сечение при МРТ. Область, обозначенная как 702, представляет собой жир. Область, обозначенная как 704, представляет собой исследуемый орган, такой как печень. Различные линии 706 представляют артефакт изображения или дающие ореол артефакты, вызванные движением жирового слоя 702.
В некоторых примерах способ применяется к сагиттальной или осевой абдоминальной визуализации, которая выполняется с помощью множества приемных антенн или антенных элементов. В принципе, изобретение совместимо со всеми типами последовательностей сбора и не требует их модификации. Изобретение состоит из модифицированных реконструированных «обычных» данных.
Одним из элементов некоторых примеров является обнаружение переднего края передней подкожно-жировой области. Это может быть сделано путем анализа имеющейся первоначальной реконструкции сканирования, изображения той же области от предыдущего сканирования или соотнесенного с катушкой сканирования или тому подобного.
Необязательно, оценка толщины жирового слоя может быть предоставлена с помощью сканирования с низким разрешением в режиме визуализации химического сдвига (например, разделяющее сканирование «вода-жир»; разделяющее сканирование «силикон-жир»); альтернативно, «типичная» толщина слоя жира может быть запрограммирована заранее. Полностью автоматизированная сегментация изображений, такая как сегментация на основе интенсивности или на основе атласа, также может служить для генерации начальной оценки объекта, интенсивность сигнала которого должна быть подавлена.
Учитывая начальную оценку объекта, самая передняя часть объекта рассматривается как «проблемный» жировой слой. Передний край в сочетании с толщиной дает нам область (2D-область на срезе или трехмерную область на множестве срезов).
Альтернативно, мы можем определить положение кривой (в мультисрезе или 3D: плоскости), представляющей центр передней жировой области.
Учитывая эту область или центральную плоскость, мы можем разработать реконструкцию, которая минимизирует чувствительность к этому региону. Это делается путем выбора для каждого реконструируемого пикселя наиболее подходящего весового коэффициента элемента катушки, который нечувствителен к передней жировой области.
На Фиг. 8 показано то же, что и на Фиг. 7. На этой схеме МРТ снова показано абдоминальное сечение 700. В этом случае имеется область 800, в которой комбинация весов элементов катушки сделана нечувствительной. Это устраняет артефакты 706 изображения или дающие ореол артефакты, показанные на Фиг. 7.
В некоторых примерах алгоритм реконструкции содержит добавление к матрице чувствительности катушки  дополнительной строки
дополнительной строки  (или множества строк
(или множества строк  , где
, где  пробегает по всем идентифицированным местам, где могут возникнуть артефакты движения). Это приводит к «обобщенной матрице чувствительности катушки»
пробегает по всем идентифицированным местам, где могут возникнуть артефакты движения). Это приводит к «обобщенной матрице чувствительности катушки»  (или, альтернативно,
(или, альтернативно,  ). Благодаря этой матрице может быть применено регулярное решение задачи SENSE, то есть:
). Благодаря этой матрице может быть применено регулярное решение задачи SENSE, то есть:
 .
.
За исключением индекса «E», это выглядит как очень знакомое уравнение SENSE, с  представляющим результирующий набор пикселей,
представляющим результирующий набор пикселей,  - ковариацию шума между каналами сбора данных,
- ковариацию шума между каналами сбора данных,  - матрицу регуляризации и
- матрицу регуляризации и  - измеренные данные массива катушек. Кроме того, как , так и теперь содержат один (или ряд) дополнительных элементов. В этом изобретении уравнение SENSE не создает эквидистантный набор развернутых пикселей, но «регулярный» эквидистантный набор плюс оценка интенсивности пикселя на местоположении источника артефакта (то есть передний край жира); считается, что в рамках объема настоящего изобретения, этот дополнительный результат неинтересен.
- измеренные данные массива катушек. Кроме того, как , так и теперь содержат один (или ряд) дополнительных элементов. В этом изобретении уравнение SENSE не создает эквидистантный набор развернутых пикселей, но «регулярный» эквидистантный набор плюс оценка интенсивности пикселя на местоположении источника артефакта (то есть передний край жира); считается, что в рамках объема настоящего изобретения, этот дополнительный результат неинтересен.
Аналогично, разница между «регулярной» матрицей регуляризации  и «
и « », заключается в том, что последняя также должна указывать ожидаемый уровень сигнала в месте расположения переднего жира, который также хорошо известен как другие диагональные элементы матрицы .
», заключается в том, что последняя также должна указывать ожидаемый уровень сигнала в месте расположения переднего жира, который также хорошо известен как другие диагональные элементы матрицы .
На Фиг. 9 и 10 показаны магнитно-резонансные изображения 900 и 1000. На Фиг. 9 показано магнитно-резонансное изображение 900, в котором сымитированные артефакты движения были добавлены к изображению.
На Фиг. 10 показано магнитно-резонансное изображение 1000, где область весовых элементов катушки была сделана нечувствительной для удаления искусственных артефактов движения, показанных на изображении 900.
В следующем описании «Possup» используется как сокращенное обозначение «Подавление чувствительности после сканирования к переднему слою жира». По сути, идея состоит в том, чтобы слегка изменить SENSE-реконструкцию таким образом, чтобы полученная комбинация антенного элемента была минимально чувствительной к (автоматически обнаруженной) области пациента, например, области подкожно-жировой клетчатки при абдоминальной визуализации.
В качестве отправной точки было взято изображение живота при задержке дыхания. Это изображение показало относительно небольшие «естественные» артефакты движения. Затем были сконструированы четыре карты чувствительности катушек, затухающие как 1/x от переднего края, правого края, заднего края и правого края изображения.
Движение моделировалось путем создания 6 разных «искаженных» изображений. Каждое искажение оставило заднюю половину объекта незатронутым, но растянуло переднюю половину таким образом, что верхний край объекта был перемещен вперед на 1, 2, 3, 4, 5 или 6 пикселей. (Объект имеет размер приблизительно 200 пикселей, поэтому передняя половина составляет около 100 пикселей, что означает, что наибольшее искажение растянуло переднюю половину примерно на 6%). Искаженное изображение показано Фиг. 9.
Все эти множества были преобразованы с помощью преобразования Фурье в k-пространство, и каждая ky-линия моделирования была случайно выбрана из одного из этих шести наборов.
Реконструкция вышеупомянутого моделирования с результатами CLEAR на изображении справа ---
Используя это изображение в качестве первой итерации, был обнаружен передний край объекта. Затем были определены две области, параллельные этому переднему краю: одна на глубине 5 пикселей (спереди) и одна на глубине 12 мм. Сведения о толщине жирового слоя были введены вручную. Это дает две кривые F1 (x) и F2 (x).
Реконструкция Possup вычисляет для каждого местоположения (x, y) весовой коэффициент элемента катушки, который минимально чувствителен к областям F1 (x) и F2 (x), при этом максимизируя чувствительность в (x, y). Затем данные элемента катушки объединяются.
Не неожиданно, передняя жировая область подавляется между 5 и 12 пикселями глубины. Математически это состоит в расширении матрицы чувствительности катушек при SENSE на два дополнительных столбца. Это здесь имеет значение, потому что это позволяет легко сочетать с SENSE. Применяя Possup, этот артефакт в значительной степени удаляется, как показано на Фиг. 10.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и предшествующем описании, такие иллюстрации и описание должны рассматриваться как иллюстративные или приведенные в качестве примера, а не ограничивающие; изобретение не ограничивается описанными вариантами осуществления.
Изучив рисунки, раскрытие, и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления. В формуле изобретения слово «содержит» не исключает других элементов или этапов, и формы единственного числа не исключают множественного числа. Один процессор или другой блок может выполнить функции нескольких пунктов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно отличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя использовать с пользой. Компьютерная программа может сохраняться/распространяться на подходящих носителях, таких как средства оптического хранения информации или твердотельных носителях информации, поставляемых вместе или как часть других аппаратных средств, но также могут распространяться в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не должны рассматриваться в качестве ограничения объема формулы изобретения.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
100 система магнитно-резонансной визуализации
104 магнит
106 туннель магнита
108 зона формирования изображения
110 градиентная катушка магнитного поля
112 блок питания градиентных катушек магнитного поля
114 катушка для исследования всего тела или антенна для исследования всего тела
116 приемопередатчик
118 субъект
120 опора субъекта
122 приемопередатчик
124 антенна магнитно-резонансной визуализации
126 антенный элемент
126' антенный элемент
126'' антенный элемент
126''' антенный элемент
130 компьютер
132 аппаратный интерфейс
134 процессор
136 пользовательский интерфейс
138 хранилище компьютера
140 память компьютера
150 команды импульсной последовательности
152 данные магнитного резонанса
154 предварительное изображение
156 анатомическая модель
158 карта вероятного движения
159 аппроксимация или сопряжение
160 местоположение источника артефактов изображения
162 обобщенное уравнение SENSE
164 скорректированное SENSE-изображение
170 машиноисполняемые инструкции
200 управление системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитного резонанса
202 реконструкция предварительного изображения по данным магнитного резонанса
204 вычисление аппроксимации или сопряжения между анатомической моделью и предварительным изображением, причем анатомическая модель содержит карту вероятного движения
206 идентификация, по меньшей мере, одного источника артефактов изображения, по меньшей мере, частично с использованием карты вероятного движения и аппроксимации или сопряжения
208 определение обобщенного уравнения SENSE, используя, по меньшей мере, частично, по меньшей мере, один источник артефактов изображения
210 построение скорректированного SENSE-изображения в соответствии с обобщенной SENSE-реконструкцией, по меньшей мере, частично используя обобщенное уравнение SENSE
300 система магнитно-резонансной визуализации
302 изображения, измеренные катушкой
304 предварительное SENSE-изображение
306 набор чувствительностей катушек
308 изображения при обратном проецировании
310 набор пораженных вокселей
400 реконструирование изображения, измеренного катушкой, для каждого из множества антенных элементов, используя данные магнитного резонанса
402 построение предварительного SENSE-изображения с использованием набора чувствительностей катушек для объединения с изображением, измеренным катушкой, для каждого из множества антенных элементов согласно протоколу SENSE
404 построение изображения при обратном проецировании для каждого из множества антенных элементов, используя предварительное SENSE-изображение и набор чувствительностей катушек
406 сравнение изображения при обратном проецировании с изображением, измеренным катушкой, для каждого из множества антенных элементов для идентификации набора пораженных вокселей для каждого из множества антенных элементов
408 численный поиск максимума меры совместимости в пределах заданной окрестности каждого, по меньшей мере, из одного источника артефактов изображения до построения скорректированного SENSE-изображения для внесения поправки, по меньшей мере, в один источник артефактов
500 артефакт в виде паразитного изображения
502 аорта
600 сагиттальный вид
602 сердце
604 артефакты изображений
700 абдоминальное сечение
702 жир
704 исследуемый орган
706 артефакты изображения
800 область
900 магнитно-резонансное изображение
1000 магнитно-резонансное изображение
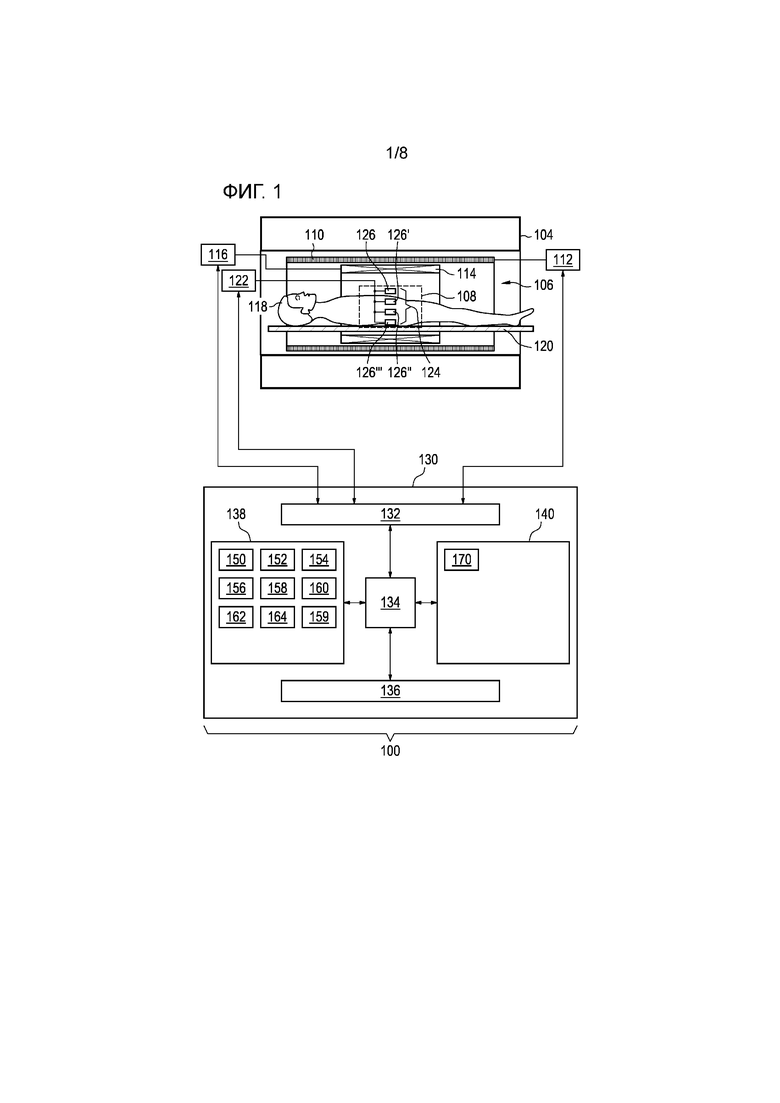
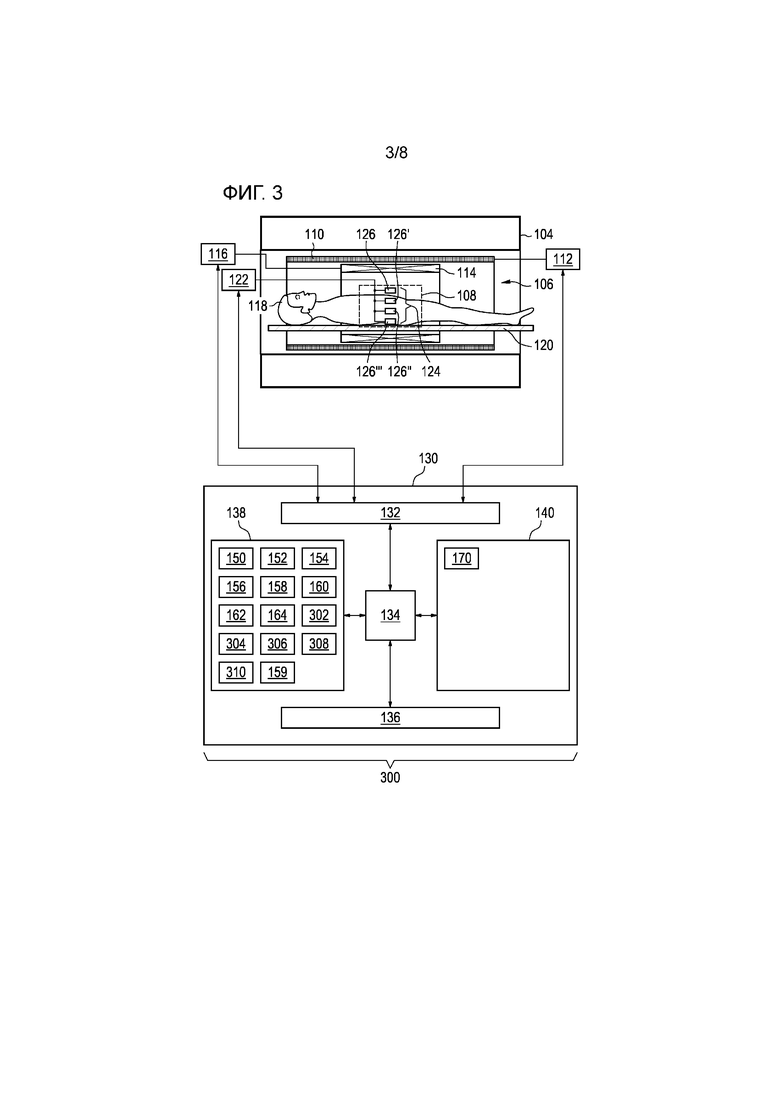
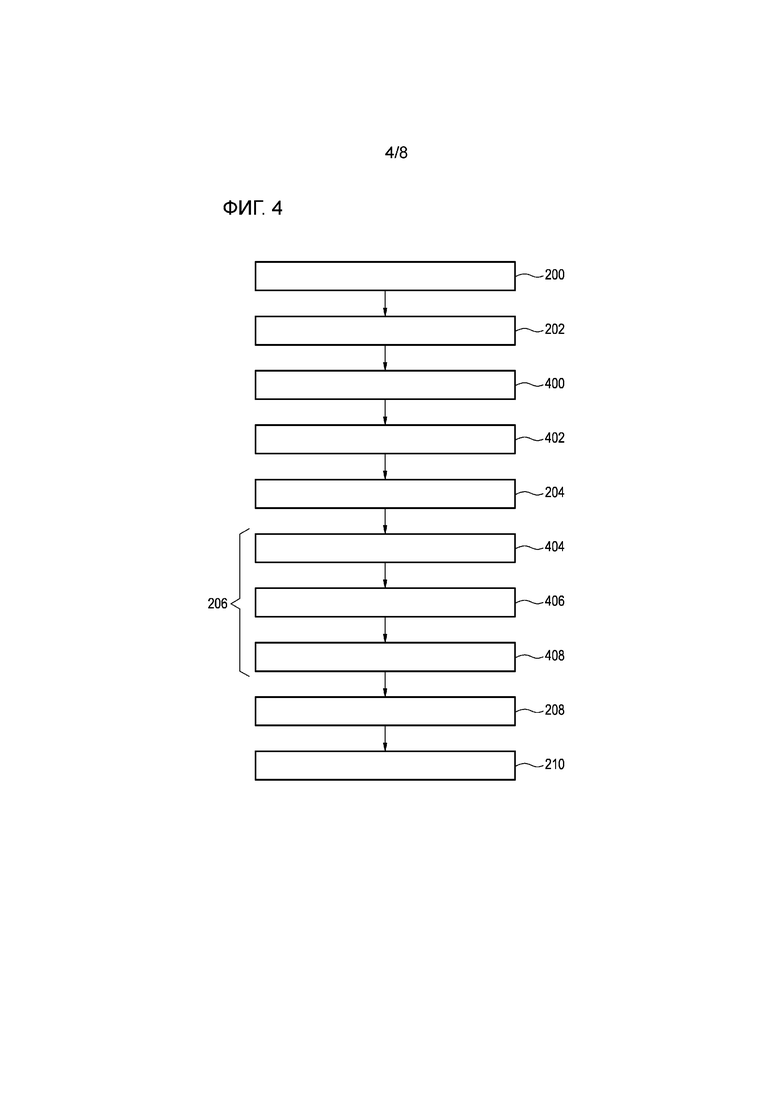
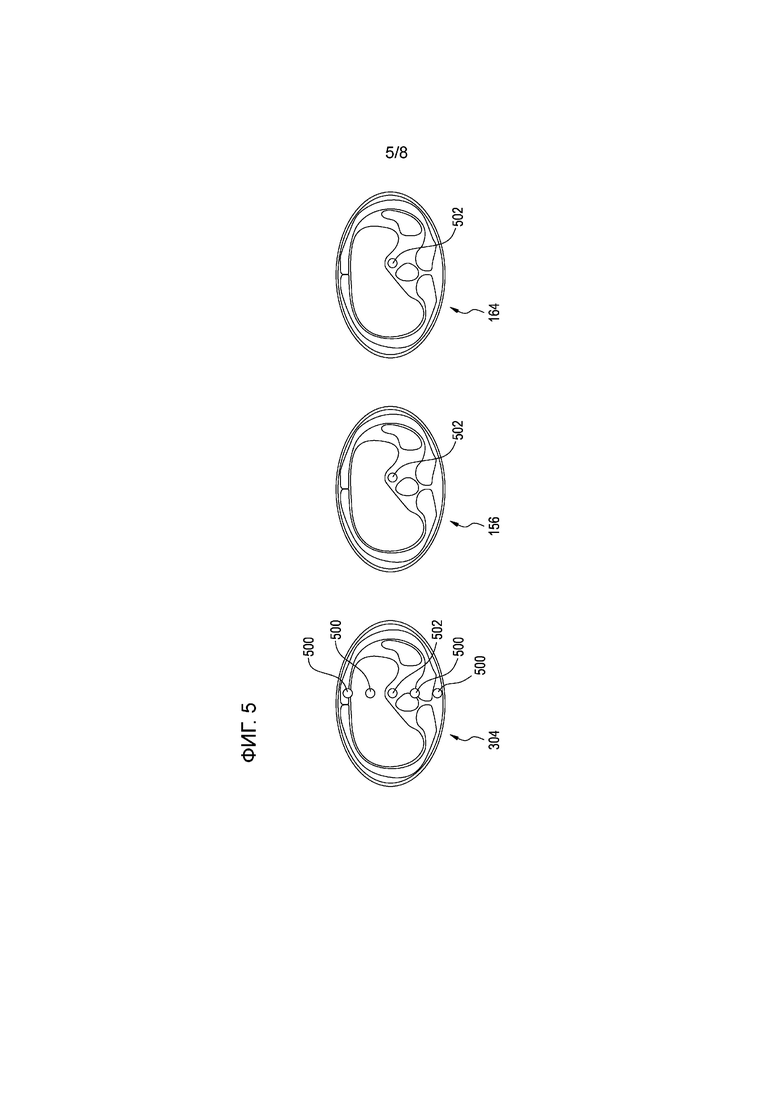
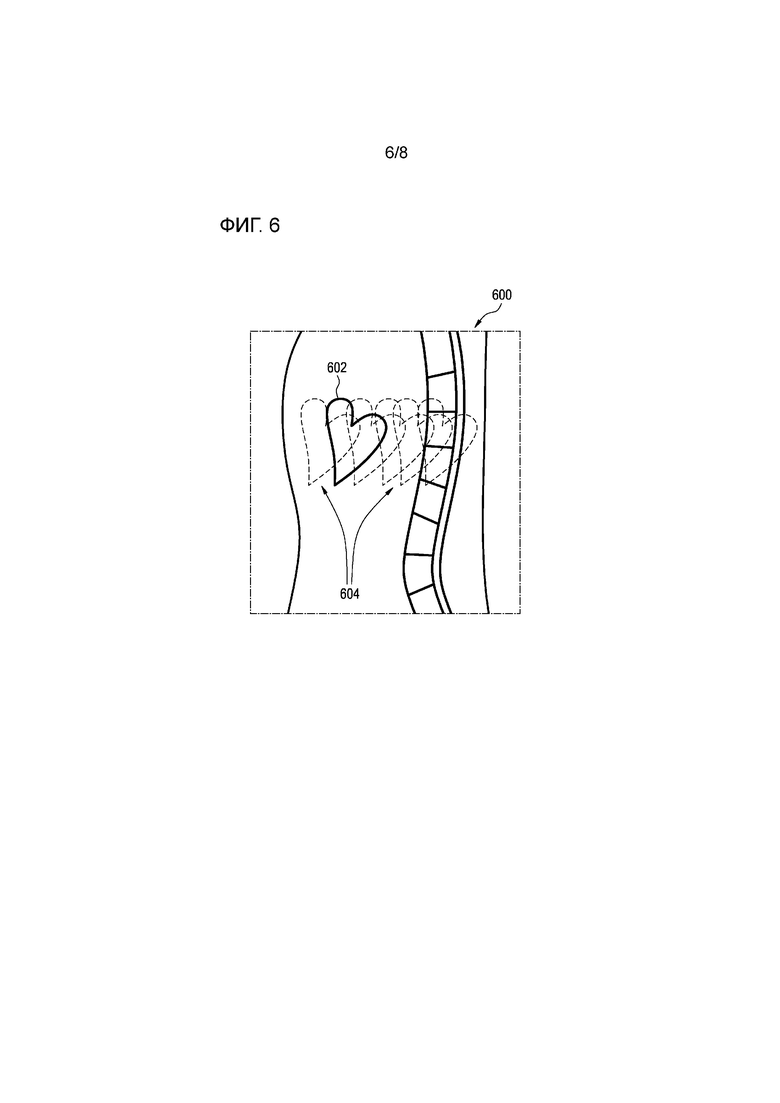
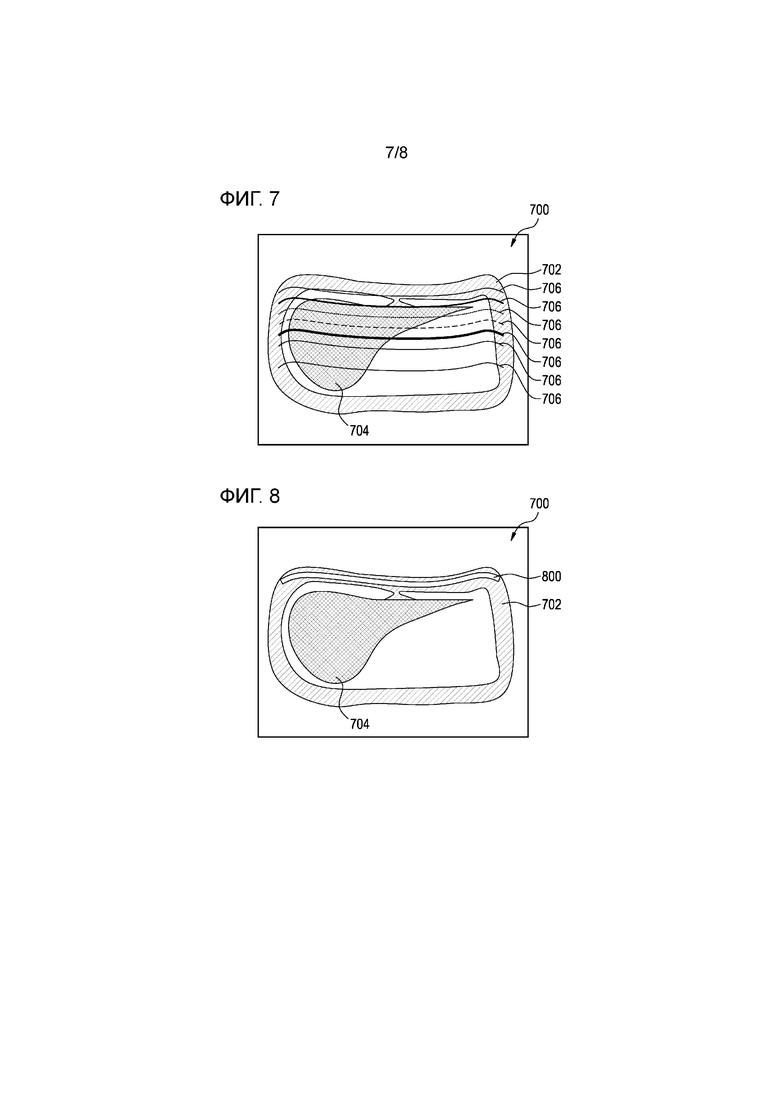
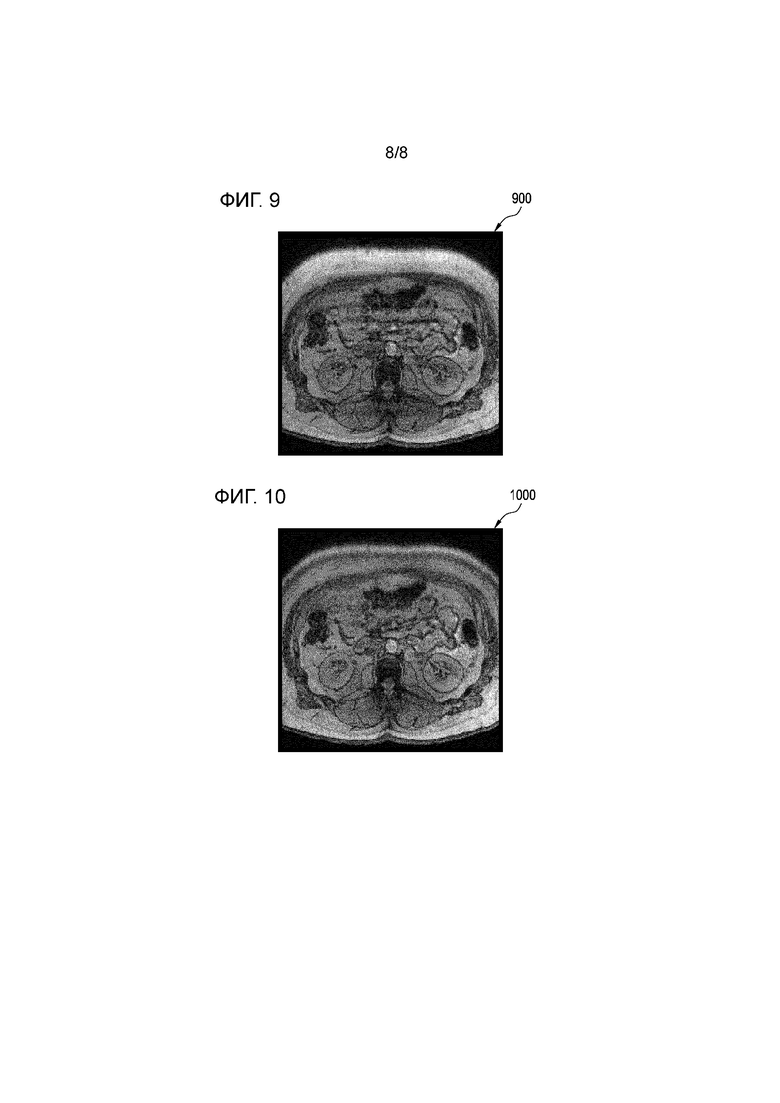
Использование: для магнитно-резонансной визуализации. Сущность изобретения заключается в том, что система магнитно-резонансной визуализации содержит радиочастотную систему для сбора данных магнитного резонанса из зоны формирования изображения, причем радиочастотная система содержит множество антенных элементов; память, содержащую машиноисполняемые инструкции и команды импульсной последовательности, причем команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE (метода параллельной обработки изображений); и процессор. Выполнение машиноисполняемых инструкций заставляет процессор: управлять системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитного резонанса; реконструировать предварительное изображение с помощью данных магнитно-резонансной визуализации; вычислять аппроксимацию между анатомической моделью и предварительным изображением, причем анатомическая модель содержит карту вероятного движения; идентифицировать по меньшей мере один источник артефактов изображения, по меньшей мере частично используя карту вероятного движения и аппроксимацию; определять обобщенное уравнение SENSE, используя по меньшей мере частично по меньшей мере один источник артефактов изображения; и строить скорректированное SENSE-изображение, используя обобщенное уравнение SENSE. Технический результат: повышение достоверности обнаружения и удаления артефактов при SENSE-визуализации. 3 н. и 11 з.п. ф-лы, 10 ил.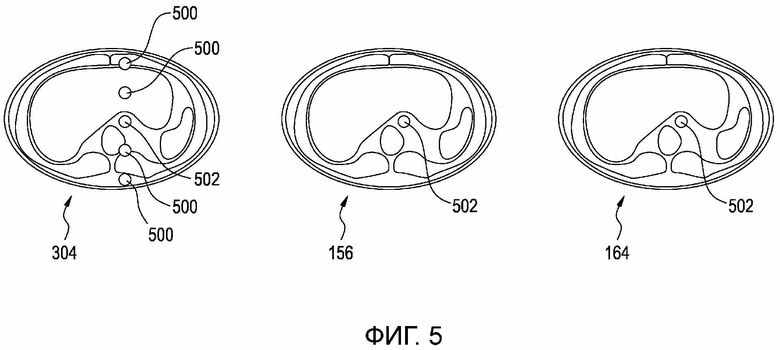
1. Система (100, 300) магнитно-резонансной визуализации, содержащая:
- радиочастотную систему (116, 122, 124, 126, 126', 126'', 126''') для сбора данных (152) магнитного резонанса из зоны (108) формирования изображения, причем радиочастотная система содержит множество антенных элементов (126, 126', 126'', 126''');
- память (140), содержащую машиноисполняемые инструкции (170) и команды (150) импульсной последовательности, причем команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE;
- процессор, в котором выполнение машиноисполняемых инструкций заставляет процессор:
- управлять (200) системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитного резонанса;
- реконструировать (202) предварительное изображение (154) с помощью данных магнитно-резонансной визуализации;
- вычислять (204) аппроксимацию (159) между анатомической моделью (156) и предварительным изображением, причем анатомическая модель содержит карту (158) вероятного движения;
- идентифицировать (206) по меньшей мере один источник (160) артефактов изображения, по меньшей мере частично используя карту вероятного движения и аппроксимацию;
- определять (208) обобщенное уравнение (162) SENSE, используя по меньшей мере частично по меньшей мере один источник артефактов изображения; и
- строить (210) скорректированное SENSE-изображение (164), используя обобщенное уравнение SENSE.
2. Система магнитно-резонансной визуализации по п.1, в которой выполнение машиноисполняемых инструкций заставляет процессор:
- реконструировать (400) изображение (302), измеренное катушкой, для каждого из множества антенных элементов, используя данные магнитного резонанса;
- строить (402) предварительное SENSE-изображение (304) с использованием набора чувствительностей катушек для объединения с изображением, измеренным катушкой, для каждого из множества антенных элементов согласно протоколу SENSE.
3. Система магнитно-резонансной визуализации по п.2, в которой предварительное изображение содержит предварительное SENSE-изображение.
4. Система магнитно-резонансной визуализации по п.2 или 3, в которой выполнение машиноисполняемых инструкций также заставляет процессор:
- строить (404) изображение (308) при обратном проецировании для каждого из множества антенных элементов, используя предварительное SENSE-изображение и чувствительности катушек; и
- сравнивать (406) изображения при обратном проецировании с изображением, измеренным катушкой, для каждого из множества антенных элементов для идентификации набора пораженных вокселей (310) для каждого из множества антенных элементов;
причем идентификация по меньшей мере одного источника артефактов изображения выполняется в пространстве изображения; причем идентификация по меньшей мере одного источника артефактов изображения выполняется по меньшей мере частично с использованием набора пораженных вокселей, используя по меньшей мере частично карту вероятного движения и аппроксимацию.
5. Система магнитно-резонансной визуализации по п.4, в которой по меньшей мере один источник артефактов изображения корректируется путем численного поиска (408) максимума меры совместимости в пределах заданной окрестности каждого из по меньшей мере одного источника артефактов изображения до построения скорректированного SENSE-изображения, причем мера совместимости зависит от разницы между набором пораженных вокселей в предварительном SENSE-изображении и пробных SENSE-изображениях при обратном проецировании для каждого из множества антенных элементов, причем пробные SENSE-изображения при обратном проецировании строятся из пробного SENSE-изображения, причем пробное SENSE-изображение строится с использованием пробного уравнения SENSE.
6. Система магнитно-резонансной визуализации по п.5, в которой пробное уравнение SENSE, которое максимизирует меру совместимости, является обобщенным уравнением SENSE.
7. Система магнитно-резонансной визуализации по пп.4, 5 или 6, в которой выполнение машиноисполняемых инструкций дополнительно заставляет процессор модифицировать по меньшей мере один источник артефактов изображения путем отмечания набора пораженных вокселей на предварительном изображении.
8. Система магнитно-резонансной визуализации по любому из пп.1-3, в которой обобщенное уравнение SENSE выбирается так, чтобы минимизировать вклад по меньшей мере части по меньшей мере одного источника артефактов изображения.
9. Система магнитно-резонансной визуализации по любому из предшествующих пунктов, в которой предварительное изображение содержит ориентировочное сканируемое изображение.
10. Система магнитно-резонансной визуализации по любому из предшествующих пунктов, в которой по меньшей мере один из источников артефактов изображения является двумерным или трехмерным.
11. Машиночитаемый носитель, содержащий машиноисполняемые инструкции (170) для выполнения процессором (134), управляющим системой (100, 300) магнитно-резонансной визуализации, причем система магнитно-резонансной визуализации содержит радиочастотную систему (116, 122, 124, 126, 126', 126'', 126''') для сбора данных (152) магнитного резонанса из зоны (108) формирования изображения, причем радиочастотная система содержит несколько антенных элементов (126, 126', 126'', 126'''), причем выполнение машиноисполняемых инструкций заставляет процессор:
- управлять (200) системой магнитно-резонансной визуализации с помощью команд (150) импульсной последовательности для сбора данных магнитного резонанса, причем команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE;
- реконструировать (202) предварительное изображение (154) с помощью данных магнитно-резонансной визуализации;
- вычислять (204) аппроксимацию (159) между анатомической моделью и предварительным изображением, причем анатомическая модель содержит карту (158) вероятного движения;
- идентифицировать (206) по меньшей мере один источник (160) артефактов изображения, по меньшей мере частично используя карту вероятного движения и аппроксимацию;
- определять (208) обобщенное уравнение (162) SENSE, используя по меньшей мере частично по меньшей мере один источник артефактов изображения; и
- строить (210) скорректированное SENSE-изображение (164), используя обобщенное уравнение SENSE.
12. Способ работы системы (100, 300) магнитно-резонансной визуализации, причем система магнитно-резонансной визуализации содержит радиочастотную систему (116, 122, 124, 126, 126', 126'', 126''') для сбора данных (152) магнитного резонанса из зоны (108) формирования изображения, причем радиочастотная система содержит множество антенных элементов (126, 126', 126'', 126'''), причем способ содержит этапы:
- управления (200) системой магнитно-резонансной визуализации с помощью команд (150) импульсной последовательности для сбора данных магнитного резонанса, причем команды импульсной последовательности заставляют процессор собирать данные магнитного резонанса от нескольких антенных элементов в соответствии с протоколом SENSE;
- реконструкции (202) предварительного изображения (154) с помощью данных магнитно-резонансной визуализации;
- вычисления (204) аппроксимации (159) между анатомической моделью (156) и предварительным изображением, причем анатомическая модель содержит карту (158) вероятного движения;
- идентификации (206) по меньшей мере одного источника артефактов изображения, по меньшей мере частично используя карту вероятного движения и аппроксимацию;
- определения (208) обобщенного уравнения (162) SENSE, используя по меньшей мере частично по меньшей мере один источник артефактов изображения; и
- построения (210) скорректированного SENSE-изображения (164), используя обобщенное уравнение SENSE.
13. Способ по п. 12, причем способ дополнительно содержит:
- реконструкцию (400) изображения (302), измеренного катушкой, для каждого из множества антенных элементов, используя данные магнитного резонанса;
- построение (402) предварительного SENSE-изображения (304) с использованием набора чувствительностей катушек для объединения с изображением, измеренным катушкой, для каждого из множества антенных элементов согласно протоколу SENSE;
- построение (404) изображения (308) при обратном проецировании для каждого из множества антенных элементов, используя предварительное SENSE-изображение и чувствительности катушек; и
- сравнение (406) изображения при обратном проецировании с изображением, измеренным катушкой, для каждого из множества антенных элементов для идентификации набора пораженных вокселей (310) для каждого из множества антенных элементов;
причем идентификация по меньшей мере одного источника артефактов изображения выполняется в пространстве изображения; причем идентификация по меньшей мере одного источника артефактов изображения выполняется по меньшей мере частично с использованием набора пораженных вокселей, используя по меньшей мере частично карту вероятного движения и аппроксимацию или сопряжение, причем по меньшей мере один источник артефактов изображения корректируется путем численного поиска (408) максимума меры совместимости в пределах заданной окрестности каждого из по меньшей мере одного источника артефактов изображения до построения скорректированного SENSE-изображения, причем мера совместимости зависит от разницы между набором пораженных вокселей в предварительном SENSE-изображении и пробных SENSE-изображениях при обратном проецировании для каждого из множества антенных элементов, причем пробные SENSE-изображения при обратном проецировании строятся из пробного SENSE-изображения, причем пробное SENSE-изображение строится с использованием пробного уравнения SENSE.
14. Способ по п. 12 или 13, в котором осуществление обобщенного уравнения SENSE имеет обобщенную матрицу чувствительности катушек, причем обобщенная матрица чувствительности катушек выбирается так, чтобы минимизировать вклад по меньшей мере части из по меньшей мере одного источника артефактов изображения.
| US 2014073904 A1, 13.03.2014 | |||
| WO 2014087270 A2, 12.06.2014 | |||
| US 2015302616 A1, 22.10.2015 | |||
| US 2012002858 A1, 05.01.2012 | |||
| ПОДАВЛЕНИЕ АРТЕФАКТА ПРИ МНОГОКАТУШЕЧНОЙ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2007 |
|
RU2434238C2 |
| RU 2007144585 A, 10.06.2009. | |||

