ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе для обработки части тела, подлежащей обработке. В частности, настоящее изобретение относится к системе для ухода за полостью рта, включающей в себя, например, зубную щетку. Настоящее изобретение также относится к обрабатывающему устройству для части тела, подлежащей обработке, способу обработки части тела, подлежащей обработке, и компьютерной программе, содержащей инструкции, которые, будучи выполняемыми по меньшей мере одним процессором, вызывают осуществление способа обработки части тела, подлежащего обработке.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Эффективность использования устройства для обработки части тела, например, зубной щетки или триммера, в целом зависит от движения устройства по части тела, подлежащей обработке. В случае зубной щетки важно быть уверенным, что все зубы очищены зубной щеткой, для уверенности в том, что, например, остатки пищи удалены с зубов, что способствует предупреждению роста зубного камня.
Чтобы помочь следить за тем, что пользователь выполнил рекомендованное действие по чистке зубов, известно обеспечение обратной связи с пользователем с применением таймера и слышимого звука или тактильной обратной связи для указания пользователю продолжительности времени, в течение которого происходит чистящее действие. Это обеспечивает пользователю указание на то, что он потратил надлежащее время на чистку зубов.
Кроме того, также известно обеспечение индикации для пользователя для сосредоточения на различных областях полости рта на основании различных промежутков времени. Однако это не обеспечивает точного указания на то, какие зубы уже действительно очищены.
Кроме того, из патентной заявки США № 2002/0183959 A1 известно о наличии системы зубной щетки, в которой положение зубной щетки анализируется относительно датчиков, расположенных в фиксированном взаимном расположении с зубами пользователя. В такой системе передающий блок генерирует известное постоянное магнитное поле, используемое датчиками, расположенными на пользователе, и датчиком в зубной щетке, для определения положения зубной щетки относительно датчиков, расположенных на пользователе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель изобретения состоит в обеспечении системы для обработки части тела, подлежащей обработке, обрабатывающего устройства для обработки части тела, подлежащей обработке, способа обработки части тела, подлежащей обработке, и/или компьютерной программы, содержащей инструкции, которые, будучи исполняемыми по меньшей мере одним процессором, вызывают осуществление способа обработки части тела, подлежащей обработке, который значительно уменьшает или преодолевает по меньшей мере одну из упомянутых выше проблем.
Согласно одному аспекту настоящего изобретения обеспечивается система для обработки части тела человека, подлежащей обработке, содержащая обрабатывающее устройство, имеющее обрабатывающий блок, реперный элемент, выполненный устанавливаемым на человеке в фиксированном взаимном расположении с частью тела, при этом обрабатывающее устройство имеет первое устройство распознавания движения, выполненное с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию обрабатывающего устройства, причем первое устройство распознавания движения представляет собой одно из шестиосного пространственного датчика, набора инерциальных датчиков, датчиков ускорения, гироскопов или их сочетаний, при этом реперный элемент имеет второе устройство распознавания движения, выполненное с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию реперного элемента, причем второе устройство распознавания движения представляет собой одно из шестиосного пространственного датчика, набора инерциальных датчиков, датчиков ускорения, гироскопов или их сочетаний, и контроллер, выполненный с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения.
Часть тела может представлять собой часть тела, подлежащую обработке.
При помощи таких конструкций возможно определять относительную траекторию и/или ориентацию обрабатывающего блока и часть тела, подлежащую обработке посредством обрабатывающего блока, без использования дополнительного блока генерирования поля, как раскрыто в патентной заявке США № 202/0183959 A1. Это означает, что система способна обеспечивать точное указание части тела, которая подлежит обработке обрабатывающим блоком, независимо от ориентации части тела. Таким образом, пользователь может перемещать часть тела, не оказывая влияния на определение участка части тела, который подлежит обработке. При помощи такой конструкции система может учитывать относительное положение части тела, и поэтому не зависит от удержания пользователем части тела, подлежащей обработке, в неподвижном положении при обработке. Это способствует тому, что относительная траектория и/или ориентация обрабатывающего блока может быть корректирована в зависимости от перемещения части тела, подлежащей обработке.
Система может дополнительно содержать модуль обратной связи, при этом контроллер выполнен с возможностью задействовать модуль обратной связи для обеспечения обратной связи с человеком, подлежащим обработке, в ответ на полученную контроллером информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке.
Преимущество этой конструкции состоит в том, что система способна обеспечивать указание обработки пользователю на основании полученной контроллером информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке.
Модуль обратной связи может быть выполнен с возможностью обеспечения визуальной, звуковой и/или тактильной обратной связи.
Модуль обратной связи может включать в себя дисплей, а контроллер может быть выполнен с возможностью задействовать дисплей для демонстрации карты части тела, подлежащей обработке, на дисплее, и обеспечения указания на этой карте траектории и/или ориентации обрабатывающего блока относительно части тела, подлежащей обработке.
При помощи такой конструкции относительно несложно снабдить пользователя точным представлением об относительной траектории и/или ориентации обрабатывающего блока. Таким образом, пользователь способен понимать, как происходит обработка.
Карта может представлять собой схематическое изображение части тела, подлежащей обработке.
Таким образом, можно обеспечить точное графическое изображение траектории и/или ориентации обрабатывающего блока, и таким образом, областей части тела, которые были подвергнуты и/или не были подвергнуты обработке.
Модуль обратной связи может находиться на реперном элементе.
При помощи такой конструкции можно легко обеспечить пользователю обратную связь. В частности, можно обеспечить пользователю прямую обратную связь, поскольку блок обратной связи установлен на пользователе. Кроме того, может быть минимизировано число компонентов системы. В вариантах осуществления обрабатывающее устройство может представлять собой зубную щетку. Обрабатывающий блок может представлять собой чистящую головку. В альтернативных вариантах осуществления обрабатывающее устройство может представлять собой устройство для срезания волос.
Реперный элемент может представлять собой носимый электронный блок.
Реперный элемент может быть выполнен устанавливаемым на голове, руке или ноге человека. Реперный элемент может представлять собой ленту. Реперный элемент может представлять собой устанавливаемый на голове дисплейный блок, например, пару «умных очков».
При помощи таких конструкций легкость установки реперного элемента относительно части тела, подлежащей обработке, максимальна. Например, если реперный элемент представляет собой устанавливаемый на голове дисплейный блок, например, пару «умных очков», то реперный элемент легко устанавливается относительно части тела, подлежащей обработке, например, когда частью тела, подлежащей обработке, являются зубы, кожа черепа и/или лицо. Кроме того, реперный элемент является заменяемым. Такие конструкции обеспечивают возможность установки реперного элемента в заданном положении относительно части тела, подлежащей обработке, и реперный элемент, например пара «умных очков», может легко удаляться и устанавливаться заново в повторяемом фиксированном относительном положении.
Контроллер может включать в себя процессор и память.
Контроллер может содержать память, хранящую реперный профиль, указывающий часть тела, подлежащую обработке, при этом контроллер может быть выполнен с возможностью обращения к реперному профилю, хранящемуся в памяти, и сравнения полученной информации, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, с реперным профилем.
Это помогает обеспечить возможность определения системой части тела, подлежащей обработке, и, таким образом, требуемую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке.
Обрабатывающее устройство может быть выполнено переключаемым между режимом настройки и режимом обработки. В режиме настройки контроллер может быть выполнен с возможностью формировать и сохранять реперный профиль, указывающий часть тела, подлежащую обработке, на основании полученной контроллером информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке. В режиме обработки контроллер может быть выполнен с возможностью обращаться к сохраненному реперному профилю, указывающему часть тела, подлежащую обработке, и сравнивать полученную информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, с сохраненным реперным профилем.
При помощи такой конструкции можно способствовать определению точного профиля части тела, подлежащей обработке, и, таким образом, помогать указанию относительного положения обрабатывающего блока. Можно настроить систему для максимального увеличения точности и эффективности системы.
При помощи такой конструкции можно увеличить до максимума точность информации, указывающей положение обрабатывающего блока во время работы системы. В частности, такая конструкция помогает противодействовать смещению показаний инерционной навигационной системы с течением времени и, таким образом, накоплению ошибки положения.
В режиме настройки контроллер может быть выполнен с возможностью преобразовывать существующий сохраненный реперный профиль, указывающий часть тела, подлежащую обработке, на основании полученной контроллером информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, для формирования нового реперного профиля, и выполнен с возможностью сохранения нового реперного профиля.
При помощи такой конструкции пользователю можно изменить существующий профиль для формирования нового профиля. Новый профиль может заместить существующий профиль или может быть сохранен вместе с ним.
В режиме настройки контроллер может быть выполнен с возможностью преобразовывать существующий сохраненный реперный профиль на основании информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно одного или более заданных положений части тела, подлежащей обработке.
Одно или более заданных положений части тела, подлежащей обработке, может представлять собой одну или более конечностей части тела, подлежащей обработке.
В режиме обработки контроллер может быть выполнен с возможностью выбора между двумя или более реперными профилями. Выбор между двумя или более реперными профилями может быть сделан в ответ на пользовательский ввод.
Таким образом, можно использовать систему более чем одним пользователем и/или использовать систему для выполнения различных обработок.
Контроллер может быть выполнен с возможностью отслеживать траекторию и/или угловую ориентацию обрабатывающего устройства и сравнить отслеженную траекторию и/или угол ориентации обрабатывающего устройства с реперным профилем, указывающим часть тела, подлежащую обработке, для определения области части тела, подлежащей обработке, которая обработана обрабатывающим устройством, на основании отслеженной траектории и/или угла ориентации обрабатывающего блока.
Контроллер может быть выполнен с возможностью задействовать модуль обратной связи на основании полученной контроллером информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, для обеспечения указания области части тела, подлежащей обработке, которая была обработана обрабатывающим блоком.
Контроллер может быть выполнен с возможностью задействовать модуль обратной связи при определении контроллером, что заданная область части тела, подлежащей обработке, обработана обрабатывающим устройством.
Преимущество вышеописанных конструкций состоит в том, что можно обеспечить обратную связь относительно обработанной части тела и/или обеспечить обратную связь относительно части тела, которая не обработана. Таким образом, пользователь может легко идентифицировать области, которые уже были обработаны и потому не требуют дополнительной обработки, и/или области, которые еще предстоит обработать. Это позволяет обеспечить, что все части тела, подлежащие обработке, обработаны. Такая конструкция помогает предотвратить, чтобы области части тела, подлежащей обработке, были пропущены при использовании системы. Это может обеспечить равномерную обработку. Альтернативно или в дополнение, вышеупомянутые конструкции могут помочь предотвратить применение чрезмерной обработки к одной или более областям части тела, подлежащей обработке. Таким образом, например, исключается чрезмерная обработка, которая может вызвать повреждение или раздражение.
Контроллер может быть выполнен с возможностью задействовать модуль обратной связи при определении контроллером, что обрабатывающее устройство обработало всю часть тела, подлежащую обработке.
Это способствует извещению пользователя, что обработка заданной области части тела, подлежащей обработке, завершена, и поэтому может предотвратить чрезмерную трату времени пользователя на обработку. Кроме того, пользователь будет предупрежден, что он не завершил обработку, если не принято извещение.
Обрабатывающее устройство может дополнительно содержать датчик, выполненный с возможностью обнаружения одного или более свойств части тела, подлежащей обработке, при этом контроллер может быть выполнен с возможностью получать информацию, указывающую упомянутое одно или более свойств части тела, подлежащей обработке, на основании информации, предоставленной датчиком.
При помощи такой конструкции возможно получение информации об одном или более свойствах части тела, подлежащей обработке, которые могут быть использованы для максимального увеличения эффективности обработки части тела, подлежащей обработке.
Контроллер может быть выполнен с возможностью регулирования одной или более рабочих характеристик обрабатывающего блока в зависимости от обнаруженного датчиком одного или более свойств части тела, подлежащей обработке.
Контроллер может быть выполнен с возможностью задействовать модуль обратной связи для обеспечения обратной связи с человеком, подлежащим обработке, в ответ на информацию, указывающую упомянутое одно или более свойств части тела, подлежащей обработке, на основании информации, обеспеченной датчиком, вместе с полученной контроллером информацией, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке.
Контроллер может быть выполнен с возможностью регулирования одной или более рабочих характеристик обрабатывающего блока в ответ на полученную контроллером информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке.
При помощи такой конструкции можно варьировать обработку, применяемую к части тела, подлежащей обработке. Например, с помощью зубной щетки можно варьировать скорость чистящей головки и, таким образом, интенсивность обработки.
Согласно другому аспекту изобретения обеспечено обрабатывающее устройство, содержащее обрабатывающий блок и первое устройство распознавания движения, выполненное с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию обрабатывающего устройства, при этом обрабатывающее устройство выполнено с возможностью предоставления информации контроллеру, который выполнен с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым устройством распознавания движения и вторым устройством распознавания движения реперного элемента, выполненное с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию реперного элемента, при этом реперный элемент выполнен устанавливаемым на человеке в фиксированном взаимном расположении с частью тела.
Согласно другому аспекту изобретения обеспечивается способ обработки части тела человека, подлежащей обработке, выдачу информации, указывающей ускорение и/или угловую ориентацию обрабатывающего устройства, с использованием первого устройства распознавания движения, выдачу информации, указывающей ускорение и/или угловую ориентацию реперного элемента, выполненного устанавливаемым на человеке в фиксированном взаимном расположении с частью тела, с использованием второго устройства распознавания движения, и получение информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения.
Способ может дополнительно содержать задействование модуля обратной связи для обеспечения обратной связи с человеком, подлежащим обработке, в ответ на полученную информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке.
Способ может дополнительно содержать формирование и сохранение реперного профиля, указывающего часть тела, подлежащую обработке, на основании полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, и обращение к сохраненному реперному профилю, указывающему часть тела, подлежащей обработке, и сравнение полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, с сохраненным реперным профилем.
Способ может дополнительно содержать преобразование сохраненного реперного профиля, указывающего часть тела, подлежащую обработке, на основании полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, для формирования нового реперного профиля, и сохранение нового реперного профиля.
Согласно другому аспекту изобретения обеспечена компьютерная программа, содержащая инструкции, которые, будучи исполняемыми по меньшей мере одним процессором, вызывают осуществление способа по любому из пп. 11-14.
Эти и другие аспекты изобретения станут очевидны из вариантов осуществления, описанных в настоящем документе, и разъяснены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения описаны, только посредством примера, со ссылкой на сопроводительные чертежи, на которых:
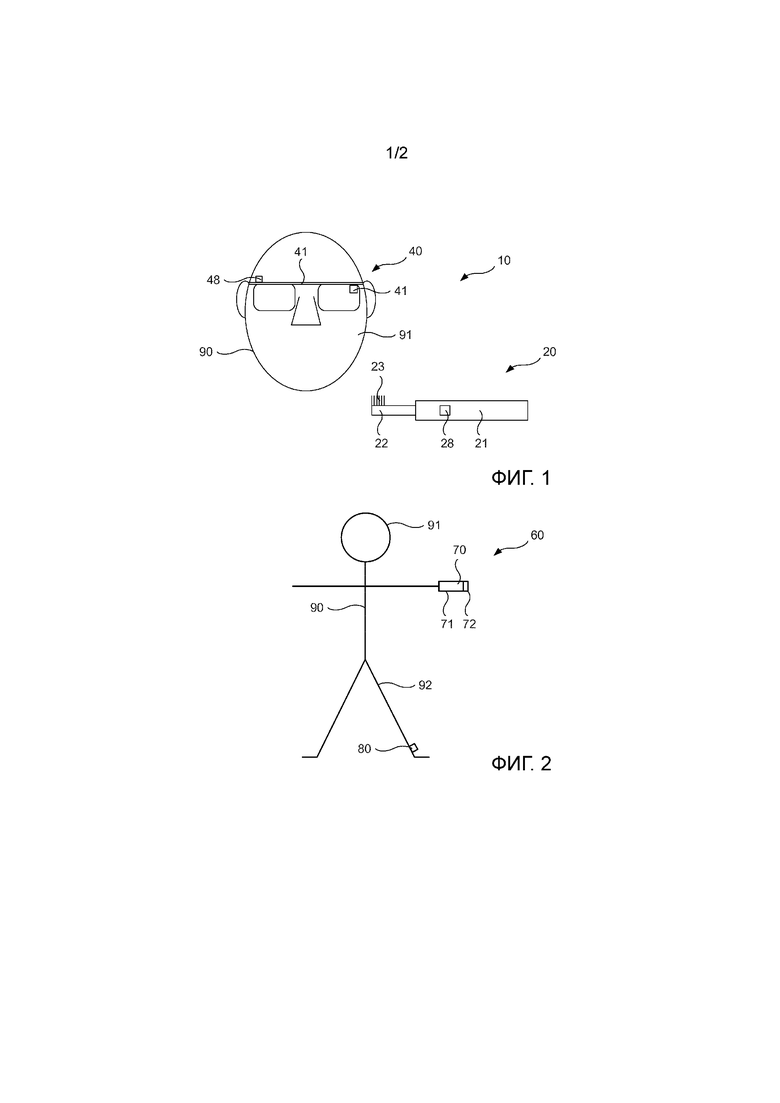
На Фиг. 1 показан схематический вид одной системы для чистки зубов;
На Фиг. 2 показан схематический вид одной системы для стрижки волос; и
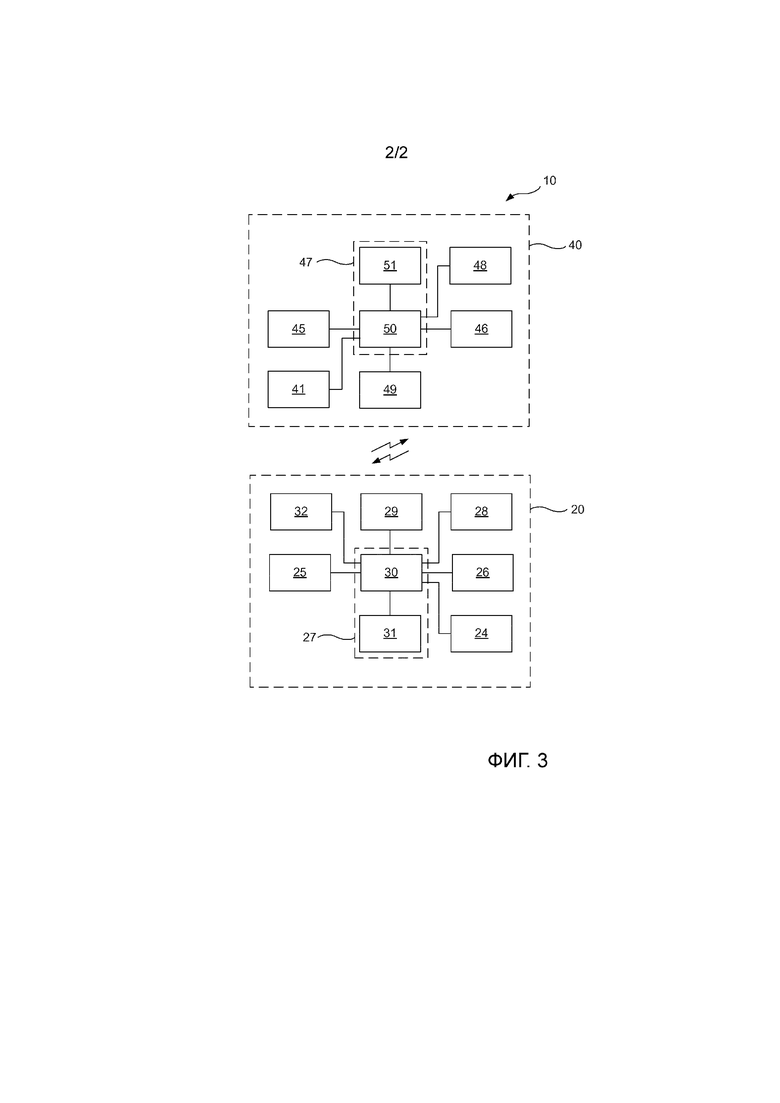
На Фиг. 3 показана схематическая блок-схема системы, представленной на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Варианты осуществления, описанные в настоящем документе, описывают систему для чистки зубов. Однако понятно, что система, как описано в настоящем документе, не ограничивается применением для чистки зубов и может быть использована для различных применений. То есть система применима к системам для обработки части тела человека, подлежащей обработке. Например, варианты осуществления, описанные в настоящем документе, применимы, например, к эпилятору, бритве, триммеру, устройству для отшелушивания, устройству для микрошлифовки кожи, лазерному устройству для стрижки волос, увлажнителю, устройству на основе интенсивного импульсного излучения или любому другому электрическому устройству, которое взаимодействует с частью пользователя, подлежащей обработке. Обрабатывающее устройство может наносить вещество, например, красящее вещество, шампунь, лекарственное вещество или любое другое вещество на часть тела, подлежащую обработке. Возможные альтернативные применения включают в себя системы, объединяющие одну или более неинвазивных или инвазивных обработок, например, флоссер, бритву, альтернативные типы удаления волос, включающие в себя режущие, очищающие кожу, дубящие кожу и/или омолаживающие кожу. В таких вариантах осуществления обработка части тела может включать в себя применение света, нанесение лосьона или других текучих сред, и/или пунктирование.
На фиг. 1 и 3 представлена система для чистки зубов 10. Система 10 содержит электрическую зубную щетку 20 и носимый электронный блок 40.
В вариантах осуществления, описанных в настоящем документе, система 10 описана со ссылкой то, что пользователь системы 10 является человеком, подлежащим обработке. То есть пользователь использует систему для обработки самого себя. Однако понятно, что в альтернативном варианте осуществления пользователь представляет собой человека, использующего систему 10 для проведения обработки другого человека с использованием системы 10.
Электрическая зубная щетка 20 действует в качестве обрабатывающего устройства. Электрическая зубная щетка 20 имеет ручку 21 и чистящую головку 22. Чистящая головка 22 действует в качестве обрабатывающего блока. Чистящая головка 22 простирается от одного конца ручки 21. Чистящая головка 22 имеет щетинки 23 на своем дистальном конце. Ручка 21 является удлиненной. Ручка 21 образует корпус зубной щетки. В представленном варианте осуществления зубная щетка 20 приводится в действие механически. То есть щетинки 23 выполнены перемещаемыми в ответ на механическое приведение в действие двигателем 24. Двигатель 24 действует в качестве механического привода, вызывающего движение щетинок. Механическое приведение в действие может вызывать вращение и/или вибрацию щетинок.
Двигатель 24 помещен в ручку 21. Механический соединитель (не показан) соединяет двигатель с чистящей головкой 22 для приведения в действие чистящей головки 22.
Хотя в представленном варианте осуществления обрабатывающее устройство представляет собой электрическую зубную щетку 20, следует понимать, что в альтернативном варианте осуществления зубная щетка представляет собой ручную зубную щетку (не представлена). В такой конструкции ручная зубная щетка имеет электрические компоненты, но чистящая головка не приводится в действие механически посредством электрического компонента.
Чистящая головка 22 выполнена снимаемой с ручки 21. Чистящая головка 22 может заменяться. Чистящая головка 22 выполнена с возможностью заменяемой другой чистящей головкой или альтернативным устройство для ухода за полостью рта. Такое устройство для ухода за полостью рта может включать в себя полирующую головку, головку для чистки межзубных промежутков или головку для чистки языка. Таким образом, зубная щетка 20 может иметь обрабатывающую головку, которая не является чистящей головкой. Альтернативно чистящая головка 22 объединена с ручкой 21.
Зубная щетка 20 дополнительно содержит блок 25 питания, например, аккумулятор. Аккумулятор является перезаряжаемым, и зубная щетка 20 также имеет основание (не показано). Основание (не показано) выполнено с возможностью поддерживать зубную щетку 20 в неиспользуемом положении. Основание имеет источник питания от сети (не показан) и электрические контакты (не показаны), которые соединяются с соответствующими электрическими контактами на ручке 21. Электрические контакты могут быть разнесены и включать в себя индуктивную зарядку. В представленных вариантах осуществления источник питания представляет собой встроенный перезаряжаемый аккумулятор, однако следует понимать, что возможен альтернативный источник питания, например, шнур питания, соединяющий зубную щетку 20 с наружным источником электричества. Основание может также заряжать носимый электронный блок 40.
Зубная щетка 20 также имеет пользовательский ввод 26. Пользовательский ввод 26 обеспечивает пользователю возможность задействовать зубную щетку 20, например, включить или выключить зубную щетку 20. Пользовательский ввод 26 может, например, представлять собой кнопку, сенсорный экран или переключатель.
Зубная щетка 20, действующая в качестве обрабатывающего устройства, содержит контроллер 27 устройства, первое устройство 28 распознавания движения и модуль 29 связи устройства.
Контроллер 27 содержит процессор 30 и память 31. Контроллер 27 устройства выполнен с возможностью задействования зубной щетки 20.
Процессор 30 может принимать любой подходящий вид. Например, процессор 30 может представлять собой или включать в себя микроконтроллер, множество микроконтроллеров, схему, один процессор или множество процессоров. Контроллер 27 устройства может быть образован из одного или множества модулей.
Память 31 принимает любой подходящий вид. Память 31 может включать в себя энергонезависимую память и/или оперативную память. Энергонезависимая память может включать в себя постоянную память (ROM), накопитель (HDD) на жестком диске или твердотельный накопитель (SSD). Память хранит, помимо прочего, операционную систему. Память может располагаться дистанционно. Оперативная память используется процессором 30 для временного хранения данных. Операционная система может содержать код, который, который, будучи выполняемым контроллером 27 устройства, управляет работой каждого из компонентов аппаратного обеспечения зубной щетки 20 или системы 10, включающей в себя зубную щетку 20. Память 31 может располагаться локально или удаленно. Контроллер 27 устройства может вызывать сохранение памятью одного или более объектов, например, одного или более профилей, удаленно или локально. Контроллер 27 устройства может обращаться к одному или более объектам, например, к одному или более профилям, сохраненным постоянной памятью, и загружать указанный один или более сохраненных объектов в оперативную память.
Контроллер 27 устройства выполнен с возможностью задействования зубной щетки 20 в ответ на ввод, например, пользовательский ввод 26. Контроллер 27 устройства выполнен с возможностью приведения в действие блока управления двигателем, который задействует двигатель 24.
Первое устройство 28 распознавания движения находится в ручке 21 зубной щетки 20. Ручка 21 действует в качестве корпуса для зубной щетки 20. Первое устройство 28 распознавания движения представляет собой шестиосный пространственный датчик. Пространственные датчики известны, и поэтому их подробное описание опущено. Первое устройство 28 распознавания движения выполнено с возможностью предоставлять показания относительного движения по шести осям (поступательное перемещение по трем осям и вращение по трем осям). Первое устройство 28 распознавания движения выполнено с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию зубной щетки 20. Информация, выданная первым устройством 28 распознавания движения, подается на контроллер 27 устройства.
Хотя в представленном и других описанных вариантах осуществления первое устройство 28 распознавания движения представляет собой шестиосный пространственный датчик, следует понимать, что могут быть использованы альтернативные датчики. Первое устройство 28 распознавания движения может включать в себя один или более различных датчиков, например, инерциальные датчики, датчики ускорения, гироскопы или их сочетания. Первое устройство 28 распознавания движения может также включать в себя настроечный модуль, например, магнитный датчик. В таком варианте осуществления магнитный датчик выполнен с возможностью обнаружения горизонтальной плоскости (магнитного поля земли) и вектора силы тяжести. Информация, выданная магнитным датчиком, также используется для настройки других датчиков для поправки на дрейф.
Первое устройство 28 распознавания движения располагается в заданном положении и ориентации в зубной щетке 20. Таким образом, ориентация и положение чистящей головки 22, действующей в качестве обрабатывающего блока, может быть легко определена на основании известной ориентации и положения первого устройства 28 распознавания движения. То есть чистящая головка 22 находится в фиксированном пространственном относительном расположении к первому устройству 28 распознавания движения.
Модуль 29 связи устройства выполнен с возможностью взаимодействия с носимым электронным блоком 40. Таким образом, зубная щетка 20 и носимый электронный блок 40 могут осуществлять связь друг с другом. Зубная щетка 20 и носимый электронный блок 40 осуществляют связь посредством беспроводного соединения. Модуль 29 связи устройства имеет передатчик и приемник. Модуль 29 связи устройства выполнен с возможностью передачи сигналов и/или данных. Таким образом, информация, выданная первым устройством 28 распознавания движения может быть передана на носимый электронный блок 40. Модуль 29 связи устройства также выполнен с возможностью приема сигналов и/или данных. Таким образом, зубная щетка выполнена с возможностью приема информации. Модуль 29 связи устройства соединен с контроллером 27 устройства. Модуль 29 связи устройства представляет собой беспроводной модуль, например, радио или инфракрасные передатчики и приемники. Следует понимать, что могут использоваться технологии WiFi (TM) и Bluetooth (TM).
Носимый электронный блок 40 действует в качестве реперного элемента. Реперный элемент выполнен устанавливаемым на теле пользователя в заданном положении.
В варианте осуществления, представленном на фиг. 1 и 3, носимый электронный блок 40 представляет собой устанавливаемый на голове дисплейный блок, например, пару «умных очков». Примером устанавливаемого на голове дисплейного блока является Google Glass (TM).
Носимый электронный блок 40 имеет источник 45 питания, например, аккумулятор. Аккумулятор является перезаряжаемым. В представленных вариантах осуществления источник питания представляет собой встроенный перезаряжаемый аккумулятор, однако, следует понимать, что возможны альтернативные источники питания, например, шнур питания, который соединяет носимый электронный блок 40 с внешним источником электричества.
Носимый электронный блок 40 также имеет пользовательский ввод 46. Пользовательский ввод 46 позволяет пользователю управлять носимым электронным блоком 40, например, для регулирования настроек. Пользовательский ввод 46 может, например, представлять собой одну или более кнопок, сенсорных экранов или переключателей.
Носимый электронный блок 40, действующий в качестве реперного элемента, содержит контроллер 47 блока, второе устройство 48 распознавания движения и блок 49 связи блока.
Контроллер 47 блока содержит процессор 50 и память 51. Контроллер 47 блока выполнен с возможностью управления носимым электронным блоком 40.
Процессор 50 контроллера 47 блока может принимать любой подходящий вид. Например, процессор 50 может представлять собой или включать в себя микроконтроллер, множество микроконтроллеров, схему, один процессор или множество процессоров. Контроллер 47 блока может быть выполнен из одного или множества модулей.
Память 51 контроллера 47 блока может принимать любой подходящий вид. Память 51 может включать в себя энергонезависимую память и/или RAM. Энергонезависимая память может включать в себя постоянную память (ROM), накопитель (HDD) на жестком диске или твердотельный накопитель (SSD). Память хранит, помимо прочего, операционную систему. Память может располагаться удаленно. Оперативная память используется процессором 50 для временного хранения данных. Операционная система может содержать код, который, будучи исполняемым контроллером 47 блока, управляет работой каждого из компонентов аппаратного обеспечения системы 10, или, альтернативно, только носимым электронным блоком 40. Контроллер 47 блока может вызывать сохранение в памяти удаленно или локально одного или более объектов, например, один или более профилей, подлежащих хранению памятью. Контроллер 47 блока может быть выполнен с возможностью обращения к одному или более объектам, например, одному или более профилям, хранящимся в постоянной памяти и загрузки одного или более сохраненных объектов в оперативную память. Указанный один или более профилей может представлять собой реперный профиль. Реперный профиль может храниться в виде справочной таблицы или другого известного средства.
Носимый электронный блок 40, действующий в качестве реперного элемента, дополнительно включает в себя модуль 41 обратной связи. Модуль 41 обратной связи выполнен с возможностью обеспечения обратной связи с пользователем. Обратная связь может представлять собой одно или более из звуковой индикации, визуальной индикации или тактильной индикации. В одном варианте осуществления модуль обратной связи включает в себя дисплей. Дисплей приводится в действие в ответ на сигналы от контроллера 47 блока для обеспечения визуальной индикации или сигналов пользователю. Следует понимать, что в некоторых вариантах осуществления дисплей может быть исключен. В представленной конструкции дисплей располагается на раме пары очков, действующих в качестве носимого электронного блока 40, и попадает на линию взгляда пользователя при ношении пары «умных очков» пользователем. Таким образом, пользователь обладает способностью легко обнаружить визуальную обратную связь.
В одном варианте осуществления модуль обратной связи включает в себя динамик (не представлен). Динамик приводится в действие в ответ на сигналы от контроллера 47 блока, чтобы производить звуковые индикаторы или сигналы для пользователя. Следует понимать, что в некоторых вариантах осуществления динамик может быть исключен. В представленной конструкции динамик располагается на раме пары «умных очков», действующих в качестве носимого электронного блока 40. Таким образом, динамик располагается вблизи головы пользователя для обеспечения возможности пользователю легко слышать звуковые сигналы, созданные динамиком.
В одном варианте осуществления модуль обратной связи включает в себя вибродвигатель (не представлен), например, для обеспечения тактильной обратной связи с пользователем (не представлен). Вибродвигатель приводится в действие в ответ на сигналы от контроллера 47 блока для создания тактильных индикаторов или сигналов для пользователя. Следует понимать, что в некоторых вариантах осуществления вибродвигатель может быть исключен. В представленной конструкции вибродвигатель располагается на раме пары «умных очков», действующих в качестве носимого электронного блока 40. Таким образом, динамик располагается вблизи головы пользователя для обеспечения возможности пользователю легко обнаруживать тактильные сигналы, созданные вибродвигателем.
Пользовательский ввод 46 в представленном варианте осуществления включает в себя один или более аппаратных ключей (не представлено), например, кнопку или переключатель. Пользовательский ввод 46 располагается на вспомогательном устройстве (не представлено), осуществляющем связь с носимым электронным блоком 40, хотя следует понимать, что пользовательский ввод 46 может располагаться на носимом электронном блоке 40, или возможно сочетание этих вариантов. Пользовательский ввод 46 выполнен с возможностью, например, обеспечения пользователю возможности выбирать рабочий режим, приводить систему 10 в действие и/или отключать систему 10.
Второе устройство 48 распознавания движения расположено на носимом электронном блоке 40. Второе устройство 48 распознавания движения представляет собой шестиосный пространственный датчик. Пространственные датчики известны, и поэтому подробное описание опущено. Второе устройство 48 распознавания движения выполнено с возможностью обеспечения считывания относительного движения по шести осям (поступательного перемещения по трем осям и вращения по трем осям). Второе устройство 48 распознавания движения выполнено с возможностью выдачи информации, указывающей ускорение и/или угловую ориентацию носимого электронного блока 40. Информация, выданная вторым устройством 48 распознавания движения, представляется контроллеру 47 блока.
Хотя в представленном и других описанных вариантах осуществления второе устройство 48 распознавания движения представляет собой шестиосный пространственный датчик, следует понимать, что могут использоваться альтернативные датчики. Второе устройство 48 распознавания движения может включать в себя один или более различных датчиков, например, инерционные датчики, датчики ускорения, гироскопы или их сочетания. Второе устройство 48 распознавания движения может также включать в себя настроечный модуль, например, магнитный датчик. В таком варианте осуществления магнитный датчик выполнен с возможностью обнаружения горизонтальной плоскости (магнитное поле земли) и вектора силы тяжести. Информация, выданная магнитным датчиком, используется для настройки других датчиков для поправки на дрейф.
Второе устройство 48 распознавания движения расположено в заданном положении и ориентации в носимом электронном блоке 40. Следует понимать, что носимый электронный блок 40 выполнен устанавливаемым на теле пользователя в заданном положении относительно части тела, подлежащей обработке. В этом варианте осуществления пара «умных очков» может устанавливаться на голову пользователя в заданном положении и ориентации на основании положения носа и ушей пользователя. Таким образом, носимый электронный блок 40 и второе устройство 48 распознавания движения выполнены устанавливаемыми в повторяемом положении и ориентации. Таким образом, ориентация и положение части тела, подлежащей обработке, может быть легко определена на основании известной ориентации и положения второго устройства 48 распознавания движения. То есть, когда носимый электронный блок 40 установлен на теле пользователя, часть тела, подлежащая обработке, находится в фиксированном относительном пространственном расположении ко второму устройству 48 распознавания движения.
Следует понимать, что положение и ориентация части тела человека, подлежащей обработке, относительно второго устройства 48 распознавания движения может изменяться в зависимости от пользователя. Таким образом, система 10 может быть выполнена с возможностью выполнения режима настройки для определения реперного профиля части тела, подлежащей обработке, в зависимости от относительного положения и ориентация второго устройства 48 распознавания движения.
Модуль 49 связи блока выполнен с возможностью связи с зубной щеткой 20. Таким образом, зубная щетка 20 и носимый электронный блок 40 могут осуществлять связь друг с другом. Зубная щетка 20 и носимый электронный блок 40 осуществляют связь посредством беспроводного соединения. Модуль 49 связи блока имеет передатчик и приемник. Модуль 49 связи блока выполнен с возможностью передавать сигналы и/или данные. Таким образом, информация, выданная первым устройством 28 распознавания движения, может приниматься носимым электронным блоком 40. Модуль 49 связи блока также выполнен с возможностью передавать сигналы и/или данные. Таким образом, модуль 49 связи блока может передавать информацию. Модуль 49 связи блока соединен с контроллером 47 блока. Модуль 49 связи блока является беспроводным модулем, например, радио или инфракрасными передатчиками и приемниками. Следует понимать, что могут использоваться технологии WiFi (TM) и Bluetooth (TM).
Хотя в представленном варианте осуществления носимый электронный блок 40 представляет собой устанавливаемый на голове дисплейный блок, следует понимать, что носимый электронный блок этим не ограничивается. В другом варианте осуществления носимый электронный блок 40, действующий в качестве реперного элемента, содержит зажим, который прикрепляется к телу пользователя или к предмету одежды. Альтернативно, носимый электронный блок 40 представляет собой модуль, который выполнен с возможностью прикрепления к ленте, предмету одежды или непосредственно к телу пользователя. Такой модуль может прикрепляться посредством зажима, удаляемого адгезива или другого известного средства прикрепления. В альтернативной конструкции носимый электронный блок 40 представляет собой, например, ленту, такую как напульсник или ленту для лодыжки, предмет одежды, «умные часы», ожерелье или другой подобный блок. Следует понимать, что носимый электронный блок 40 выполнен устанавливаемым, непосредственно или опосредованно, на теле пользователя.
Один альтернативный вариант осуществления системы 60 для обработки части тела, подлежащей обработке, представлен на фиг. 2. Конструкция этого варианта осуществления системы 60 в целом такая же, как конструкция системы 10, представленной на фиг. 1 и 3, и поэтому подробное описание опущено. Однако в этом варианте осуществления система 60 для обработки части тела, подлежащей обработке, представляет собой систему для стрижки волос. Система 60 содержит режущее устройство 70 и носимый электронный блок 80, действующий в качестве реперного элемента. Режущее устройство 70, действующее в качестве обрабатывающего устройства, содержит ручку 71 и режущую головку 72.
Режущее устройство 70 представляет собой ручное электрическое устройство для бритья. Однако, очевидно, что режущее устройство 70 может иметь альтернативную конструкцию. Например, режущее устройство 70 может представлять собой ручное устройство для стрижки. Режущее устройство 70 действует в качестве обрабатывающего устройства. Режущее устройство 70 перемещается по коже части тела 90 пользователя, например, его ноги 91, для сбривания волос на части тела.
Режущая головка 72 выполнена с возможностью стрижки волос. Режущая головка 72 действует в качестве обрабатывающего блока. Режущая головка 72 содержит сетку (не представлен), через которую выступают волосы, и подвижное лезвие (не представлено), которое движется по сетке. В альтернативной конструкции подвижное лезвие (не представлено), имеющее первую группу зубцов, может передвигаться возвратно-поступательным образом относительно неподвижного лезвия (не представлено), имеющего вторую группу зубцов.
В варианте осуществления, представленном на фиг. 2, носимый электронный блок 80 представляет собой ленту для лодыжки. Лента для лодыжки имеет манжетную часть (не представлена), которая проходит вокруг лодыжки пользователя, и модуль датчика (не представлен) на манжетной части. Лента для лодыжки является упругой для обеспечения возможности надежной установки носимого электронного блока 80 на лодыжке пользователя. Следует понимать, что прикрепление носимого электронного блока 80 к лодыжке предназначено для повторяемого прикрепления. Это обеспечивает возможность установки носимого электронного блока 80 в определенном повторяемом относительном положении на части тела, подлежащей обработке.
Альтернативно лента для лодыжки является жесткой, и одна ее часть выполнена с возможностью поворота относительно другой для обеспечения прикрепления носимого электронного блока 80 на пользователе. Предполагаются дополнительные альтернативные установочные конструкции.
Для задействования системы 10 на фиг. 1 и 3 пользователь помещает устанавливаемый на голове дисплейный блок на голову в стандартном положении ношения очков. То есть носимый электронный блок 40 устанавливается на голове пользователя в конкретном положении и ориентации. Когда черты лица пользователя находятся в фиксированных положениях относительно друг друга, носимый электронный блок 40, и, таким образом, второе устройство 48 распознавания движения, расположено в известном положении относительно зубов пользователя. Расстояние и ориентация зубов пользователя от носа и ушей пользователя являются фиксированными, и потому носимый электронный блок 40, таким образом, устанавливается в заданном пространственном расположении относительно части тела, подлежащей обработке. На основании положения и ориентации носимого электронного блока 40 на голове пользователя известны, таким образом, положение и ориентация зубов пользователя.
Следует понимать, что относительные положения зубов пользователя, которые в этом варианте осуществления представляют собой часть тела пользователя, подлежащую обработке, и другие черты лица различаются у разных людей в пределах известных параметров. Таким образом, возможно сохранение реперного профиля в памяти 51 на основании этих известных параметров. Контроллер 47 блок, таким образом, может обращаться к реперному профилю, сохраненному блоком 51 памяти, для определения информации, указывающей на ускорение и ориентацию зубов пользователя на основании информации, указывающей ускорение и ориентацию второго устройства 48 распознавания движения, выданной вторым устройством 48 распознавания движения.
В представленном варианте осуществления реперный профиль предварительно загружен в память и может быть основан на усредненных лицевых размерах. Альтернативно новый реперный профиль хранится или существующий реперный профиль преобразуется в блоке 51 памяти контроллером 47 блока во время режима настройки.
Система 10 приводится в действие пользователем. Контроллер 27 устройства управляет двигателем 24 для задействования зубной щетки 20 в режиме обработки. Следует понимать, что зубная щетка 20 может иметь более одного режима обработки. Первое устройство 28 распознавания движения задействуется для выдачи информации, указывающей ускорение и/или угловую ориентацию обрабатывающего устройства. Эта информация подается на контроллер 47 блока модулем 29 связи устройства, передающим эту информацию, которая затем принимается модулем 49 связи блока. Поскольку расстояние и ориентация чистящей головки 22, действующей в качестве обрабатывающего блока, от первого устройства 28 распознавания движения известно и сохранено, контроллер 47 блока или контроллер 27 устройства может определить характеризующее ускорение и угловую ориентацию чистящей головки 22.
Второе устройство 48 распознавания движения задействуется для выдачи информации, указывающей ускорение и/или угловую ориентацию носимого электронного блока 40, действующего в качестве реперного элемента. Эта информация предоставляется контроллеру блока. Поскольку расстояние и ориентация зубов, которые являются частью тела, подлежащей обработке, от второго устройства 48 распознавания движения определяется посредством ссылки на сохраненный реперный профиль, контроллер 47 блока может определить характерное ускорение и угловую ориентацию зубов.
На основании информации, представленной первым и вторым устройствами 28, 48 распознавания движения, контроллер 47 блока может получать информацию, указывающую траекторию и ориентацию чистящей головки 22 относительно зубов пользователя. Контроллер 47 блока определяет траекторию и ориентацию чистящей головки 22 на основании информации, предоставленной первым устройством 28 распознавания движения. Контроллер 47 блока определяет траекторию и ориентацию зубов пользователя на основании информации, предоставленной вторым устройством 48 распознавания движения, и ссылки на сохраненный реперный профиль.
Пользователь использует систему 10 в рабочем режиме путем удерживания ручной зубной щетки 20 и перемещения зубной щетки 20 по зубам пользователя. Чистящая головка 22 помещена на уровне зубов пользователя, и щетка 23 передвигается двигателем 24. В традиционной зубной щетке трудно точно предсказать и регулировать степень выполнения обрабатывающего действия, и пользователь полагается на свои навыки для перемещения устройства надлежащим образом. Кроме того, в частности, для задних зубов, которые пользователю трудно видеть, трудно определить правильную ориентацию чистящей головки относительно друг друга.
Изобретение, как определено в формуле изобретения, обеспечивает систему для обработки части тела, подлежащей обработке, в том числе для обработки зубов. Система 10 выполнена с возможностью предоставления информации, указывающей траекторию и/или угол ориентации обрабатывающего блока относительно части тела, подлежащей обработке. Система может также задействовать модуль обратной связи для обеспечения обратной связи с пользователем на основании траектории и/или угла ориентации обрабатывающего устройства, определенных контроллером.
Контроллер 47 блока выполнен с возможностью определения ускорения на основании информации, выданной первым устройством 28 распознавания движения. В частности, контроллер 47 блока может быть выполнен с возможностью определения ускорения зубной щетки посредством контроля информации, сформированной первым устройством 28 распознавания движения, и определения изменения положения первого устройства 28 распознавания движения на основании определенного изменения положения первого устройства 28 распознавания движения через заданный промежуток времени. Контроллер 47 блока может также, или альтернативно, определять угол ориентации зубной щетки 20 относительно части тела, подлежащей обработке.
Первое устройство 28 распознавания движения выполнено с возможностью выдавать информацию, характеризующую зубную щетку 20, на постоянной основе или через заданный интервал времени. Первое устройство 28 распознавания движения, таким образом, обладает способностью предоставления информации, указывающей траекторию зубной щетки 20. Второе устройство 48 распознавания движения выполнено с возможностью выдавать информацию, указывающую часть тела, подлежащую обработке, на постоянной основе или через заданный интервал времени. Второе устройство 48 распознавания движения, таким образом, обладает способностью предоставления информации, указывающей траекторию части тела, подлежащей обработке. Контроллер 47 блока, таким образом, получает информацию, указывающую траекторию и ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами 28, 48 распознавания движения. Контроллер 47 блока выполнен с возможностью определения относительной траектории и ориентации на основании сравнения информации, предоставленной первым и вторым устройствами 28, 48 распознавания движения.
По информации, указывающей траекторию и ориентацию части тела, подлежащей обработке, в данном случае головы пользователя, и имеющейся зубной щетке 20, можно определить положение, траекторию и/или угол ориентации зубной щетки 20 относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами 28, 48 распознавания движения. Относительные положения могут быть вычислены на основании векторного вычитания. Таким образом, относительные положения можно легко определить.
Когда пользователь помещает зубную щетку 20 на уровне зубов пользователя и перемещает зубную щетку 20 по зубам, система 10 может определять относительные положения зубной щетки 20. Система 10 также может определить путь зубной щетки 20 относительно зубов на основании выданных данных, предоставленных в контроллер 47 блока. Система 10 может также, или альтернативно, определять угол ориентации зубной щетки 20 относительно части тела, подлежащей обработке, на основании выданных данных, предоставленных в контроллер 47 блока. Контроллер 47 блока принимает данные от первого устройства 28 распознавания движения и второго устройства 48 распознавания движения, и контроллер 47 блока выполнен с возможностью задействовать модуль 41 обратной связи, например, динамик или дисплей, в ответ на данные, принятые для обеспечения обратной связи с пользователем.
Контроллер 47 блока выполнен с возможностью обращения к реперному профилю части тела, подлежащей обработке. Реперный профиль может храниться в справочной таблице. Реперный профиль может храниться в памяти 51. В такой конструкции контроллер 47 блока выполнен с возможностью обращения к памяти 51 для доступа к реперному профилю. В одном варианте осуществления реперный профиль сохраняется в оперативной памяти.
Реперный профиль предоставляет информацию о части тела, подлежащей обработке. Таким образом, контроллер 47 блока выполнен с возможностью определения относительного расположения зубов пользователя относительно носимого электронного блока 40. Информация, сохраненная реперным профилем, передается сохраняется со ссылкой на систему координат. В одной такой конфигурации используется система полярных координат, в которой каждое положение на части тела, подлежащей обработке, определяется расстоянием от фиксированной точки и углом от фиксированного направления. В другой конфигурации используется ортогональная система координат. Для каждой точки дается условие, например, значение, рабочей характеристики. Альтернативно, реперный профиль может представлять собой карту части тела пользователя, подлежащей обработке.
Хотя в одной конструкции каждое возможное положение части тела, подлежащей обработке, сохраняется, в альтернативном варианте осуществления сохраняется ограниченное число положений, например, конечные точки части тела, подлежащей обработке, и контроллер 47 выполнен с возможностью экстраполировать данные для других положений на основании одного или более данного ограниченного числа положений. Преимущество такого подхода состоит в том, что размер данных для реперного профиля может быть минимизирован.
По мере перемещения зубной щетка 20 по части тела, подлежащей обработке, контроллер 47 блока выполнен с возможностью определения информации, указывающей ускорение и угловую ориентацию реперного элемента посредством обращения к реперному профилю. Следует понимать, что чистящая головка 22 будет иметь рабочую зону, по которой будет обеспечиваться обработка. То есть обрабатывающая головка 22 будет иметь зону обработки, которая, будучи расположенной над участком части тела, подлежащей обработке, будет выполнять обработку на указанного участка.
Контроллер 47 выполнен с возможностью отслеживать путь зубной щетки 20 относительно части тела, подлежащей обработке. Контроллер 47 блока выполнен с возможностью регистрировать траекторию пути зубной щетки 20. А именно, контроллер 47 блока выполнен с возможностью определения пути зубной щетки 20 относительно части тела, подлежащей обработке, и вызывать сохранение информации, указывающей путь зубной щетки 20, памятью 51 блока.
Контроллер 47 блока выполнен с возможностью сравнивать информацию, указывающую отслеженный путь зубной щетки 20 относительно зубов пользователя, на основании отслеженного пути носимого электронного блока 40, с реперным профилем, предоставляющим информацию, указывающую часть тела, подлежащую обработке. Таким образом, контроллер 47 блока выполнен с возможностью определения области части тела, подлежащей обработке, которая уже обработана. А именно, контроллер 47 блока выполнен с возможностью определения области части тела, подлежащей обработке, которая уже обработана, на основании определенной траектории и ориентации зубной щетки 20 относительно зубов на основании информации, предоставленной первым и вторым устройствами 28, 48 распознавания движения. Контроллер блока также выполнен с возможностью учитывать ширину и/или площадь основания чистящей головки 22. Расположение чистящей головки 22 может быть сохранено в памяти, к нему может обращаться контроллер 47 блока. При помощи такой конструкции контроллер 47 может определять область, которую прошла чистящая головка 22. В представленном варианте осуществления контроллер 47 блока выполнен с возможностью регистрировать, что область части тела, подлежащей обработке, обработана, при определении, что чистящая головка 22 прошла по любому пути относительно части тела, как определено относительным ускорением и угловой ориентацией первого и второго устройств 28, 48 распознавания движения. В альтернативном варианте осуществления контроллер 47 блока выполнен с возможностью регистрировать, что область части тела, подлежащей обработке, обработана, когда контроллер 47 блока определяет, что чистящая головка 22 прошла по ней по одной или более заданным ориентациям.
В варианте осуществления, в котором контроллер 47 блока выполнен с возможностью регистрировать, что область части тела, подлежащей обработке, обработана, когда контроллер 47 блока определяет, что чистящая головка 22 прошла по ней по одной или более заданным ориентациям и/или траектории относительно части тела, подлежащей обработке, заданная ориентация и/или траектория определяется контроллером 47 блока посредством обращения к реперному профилю.
Когда контроллер 47 блока определяет с помощью обращения к реперному профилю, что заданная часть тела, подлежащая обработке, обработана или чистящей головкой 22, проходящей по всей области в любой ориентации, или в заданной ориентации, контроллер 47 блока выполнен с возможностью задействовать один или более модулей обратной связи, например, динамик, дисплей и/или вибродвигатель, для обеспечения обратной связи с пользователем относительно того, что заданная область части тела, подлежащей обработке, или часть тела, подлежащая обработке, обработана. Таким образом, возможно указание системой 10 пользователю, что вся часть тела, подлежащая обработке, обработана, и поэтому никакая область не пропущена.
В представленном варианте осуществления контроллер 47 блока выполнен с возможностью задействовать дисплей для испускания звука, когда контроллер определяет, что часть тела, подлежащая обработке, как определено реперным профилем, к которому обращается контроллер, обработана. Альтернативно, контроллер 47 блока может быть выполнен с возможностью задействования одного или более других модулей обратной связи, например, динамика, другого визуального индикатора или вибродвигателя, для обеспечения тактильной обратной связи.
В одном варианте осуществления контроллер 47 блока выполнен с возможностью задействовать дисплей, например, для обеспечения активной обратной связи с пользователем во время работы системы 10. В одном таком варианте осуществления контроллер 47 блока выполнен с возможностью задействовать дисплей для демонстрации карты части тела, подлежащей обработке, на основании реперного профиля, предоставленного контроллером 47 блока. Тогда контроллер 47 блока может быть выполнен с возможностью задействовать дисплей для демонстрации пути чистящей головки 22 по части тела, подлежащей обработке, на основании информации, выданной контроллером 47 блока, и для демонстрации обработанной части тела. Затем система 10 обладает способностью легко обеспечивать обратную связь с пользователем относительно части тела, подлежащая обработке, которая обработана и которая еще подлежит обработке. Дисплей может представлять реальную или схематическую карту части тела, подлежащей обработке, и может также представлять относительное положение чистящей головки 22.
В одном варианте осуществления система 10 выполнена с возможностью обеспечения обратной связи во время использования для указания траектории и/или ориентации, которой следует придерживаться пользователю, на основании предоставленной информации и реперного профиля, предоставленного контроллером 47 блока. В такой системе 10 контроллер 47 блока может быть выполнен с возможностью задействования одного или более модулей обратной связи для обеспечения одной или более из визуальной, звуковой или тактильной обратной связи.
Следует понимать, что одно или более различных средств обратной связи может использоваться для обеспечения указания пользователю требуемого пути чистящей головки 22 относительно части тела, подлежащей обработке.
Как только полное прохождение части тела, подлежащей обработке, завершено, и контроллер 47 блока задействовал один или более модулей обратной связи для указания, что обработка части тела, подлежащей обработке, завершена, пользователь может удалить зубную щетку 20 с части тела, подлежащей обработке. Следует понимать, что зубная щетка 20 может быть удалена с части тела, подлежащей обработке, во время обработки, и система 10 может быть выполнена с возможностью продолжения задействования зубной щетки 20, когда зубная щетка 20 перемещается обратно к части тела, подлежащей обработке. При помощи такой конструкции пользователю можно переместить часть тела, подлежащую обработке, и можно определить и учесть контроллером 47 блока указанное перемещение на основании выданных данных.
Хотя в вышеописанном варианте осуществления используется один реперный профиль, следует понимать, что контроллер 47 блока может быть выполнен с возможностью выбирать из двух или более реперных профилей в ответ на пользовательский ввод.
В альтернативном варианте осуществления реперный профиль также хранит другие рабочие характеристики, например, требуемое давление или период покоя, и контроллер 47 блока информирует пользователя зубной щетки посредством одного или более модулей обратной связи, например динамика и/или дисплея. Альтернативно, контроллер 47 блока выполнен с возможностью изменения рабочей характеристики зубной щетки 20, например, рабочей скорости двигателя 24. Например, при работе зубной щетки контроллер 47 блока изменяет рабочую характеристику модуля 41 обратной связи для информирования пользователя в зависимости от информации, сформированной первым и вторым устройствами распознавания движения 28, 48, так чтобы пользователь мог выполнить надлежащее действие. Модуль обратной связи может обеспечивать акустический сигнал, в виде звукового сигнала, например, пиканья. Альтернативно, модуль обратной связи может обеспечивать тактильную обратную связь в виде вибраций, которые воспринимаются пользователем через ручку устройства. Альтернативно, модуль обратной связи может обеспечивать оптический сигнал, например, мигающий сигнал или другой оптический индикатор. Следует принимать во внимание, что модуль обратной связи может также обеспечивать более одного из вышеупомянутых сигналов в зависимости от информации, полученной контроллером.
В другом альтернативном или дополнительном варианте осуществления реперный профиль также хранит данные, связанные с одной или более рабочими характеристиками зубной щетки, например, рабочей скоростью двигателя 24, которая коррелирована с хранимыми данными об ускорении и/или угловой ориентации. Контроллер 47 блока выполнен с возможностью обращения к сохраненной рабочей характеристике и изменения рабочей характеристики зубной щетки 20 в ответ на полученной контроллером информацию, указывающую траекторию и/или ориентацию чистящей головки относительно части тела, подлежащей обработке. При помощи такой конструкции можно варьировать интенсивность обработки в зависимости от ориентации и/или положения чистящей головки относительно зубов. Зубная щетка 20, действующая в качестве обрабатывающего устройства, может также включать в себя дополнительный рабочий блок (не представлен), например, аппликатор текучей среды. Единственная или одна из сохраненных рабочих характеристик зубной щетки 20, с возможностью обращения к которой выполнен контроллер 47 блока и с возможностью изменения которой выполнен контроллер 47 блока, может, таким образом, представлять собой рабочую характеристику дополнительного рабочего блока.
Система 10 может первоначально приводиться в действие в режиме настройки. Режим настройки может запускаться посредством пользовательского ввода. В режиме настройки контроллер 47 блока выполнен с возможностью получать реперный профиль или преобразовывать существующий реперный профиль.
В режиме настройки пользователь перемещает чистящую головку 22, действующую в качестве обрабатывающего блока, по зубам. Пользователь может выполнить полное чистящее действие или может просто перемещать зубы по всем зубам. Это действие может быть указано пользователю модулем обратной связи. Когда пользователь предпринимает это действие, контроллер 47 блока снабжается информацией, указывающей ускорение и/или угловую ориентацию чистящей головки, посредством первого устройства 28 распознавания движения, и информацию, указывающую ускорение и/или угловую ориентацию зубов пользователя, посредством второго устройства 48 распознавания движения в носимом электронном блоке 40, установленном на голове пользователя. Таким образом, контроллер 47 блока выполнен с возможностью коррелировать информацию, предоставляемую первым и вторым устройствами 28, 48 распознавания движения, для выдачи информации, указывающей траекторию и ориентацию чистящей головки 22 и зубов пользователя, которая должна соблюдаться для обеспечения выполнения полного обрабатывающего действия. Эта коррелированная информация сохраняется контроллером 47 блока в качестве реперного профиля. Следует понимать, что контроллер 47 блока может вместо формирования нового реперного профиля преобразовать записанную информацию в существующем сохраненном реперном профиле.
Первое устройство 28 распознавания движения выполнено с возможность выдачи информации, характеризующей чистящую головку 22, на основании определенного положения первого устройства 48 распознавания движения.
Второе устройство 48 распознавания движения выполнено с возможностью выдачи информации, характеризующей часть тела, подлежащую обработке, на основании определенного положения второго устройства 48 распознавания движения. Контроллер 47 блока выполнен с возможностью коррелировать информацию, предоставленную первым и вторым устройствами 28, 48 распознавания движения, и формировать реперный профиль на основании этой информации.
Как только пользователь выполнил обрабатывающее действие, контроллер 47 может сохранить коррелированные данные, связанные с информацией, принятой от первого и второго устройств 28, 48 распознавания движения во время режима настройки, для формирования реперного профиля части тела, подлежащей обработке.
В альтернативном варианте осуществления контроллер 47 блока задействует дисплей, действующий в качестве модуля обратной связи, для указания пользователю одного или более заданных положений расположения чистящей головки 22 на части тела, подлежащей обработке. Когда чистящая головка 22 расположена в единственном или каждом из определенных положений, контроллер 47 блока снабжается указанием сохранить данные, например, посредством пользовательского ввода. Контроллер 47 блока выполнен с возможностью сохранения этих данных, например, в RAM. Контроллер 47 блока может затем экстраполировать эти данные для формирования нового реперного профиля части тела, подлежащей обработке. К этому реперному профилю может обращаться контроллер 47 блока для обеспечения информации, указывающей относительную траекторию и/или ориентацию чистящей головки 22 относительно зубов.
Реперный профиль записывается и сохраняется контроллером 47 блока в память 51 для обращения к нему во время работы системы 10 или во время будущего использования системы 10.
В другом альтернативном или дополнительном варианте осуществления зубная щетка 20, действующая в качестве обрабатывающего устройства, дополнительно содержит датчик 32, выполненный с возможностью обнаружения одного или более свойств части тела, подлежащей обработке. Например, чистящая головка 24 может включать в себя датчик обнаружения зубного камня, выполненный с возможностью определения наличия зубного камня. Датчик 32 может представлять собой оптический датчик. Контроллер 47 блока выполнен с возможностью получать информацию, указывающую одно или более свойств части тела, подлежащей обработке, на основании информации, предоставленной датчиком 32.
В одном варианте осуществления контроллер 47 блока выполнен с возможностью указания пользователю, когда определяется свойство части тела, подлежащей обработке, например, наличие зубного камня на зубе. Контроллер 47 блока выполнен с возможностью приведения в действие единственного или одного или более модулей обратной связи, например, динамика, дисплея и/или вибродвигателя, для предоставления обратной связи пользователю на основании определенного свойства части тела, подлежащей обработке. Информация, указывающая одно или более свойств части тела, подлежащей обработке, на основании информации, предоставленной датчиком 32, может быть коррелирована с информацией, представленной первым и вторым устройствами 28, 48 распознавания движения, контроллером 47 блока для обеспечения информации, указывающей одно или более свойств части тела для каждого участка части тела, подлежащей обработке.
В другом варианте осуществления, контроллер 47 блока выполнен с возможностью регулирования рабочей характеристики зубной щетки 20 на основании определенного свойства части тела, подлежащей обработке.
Контроллер 47 блока может также или альтернативно быть выполнен с возможностью формирования реперного профиля или преобразования существующего реперного профиля на основании полученной информации, указывающей одно или более свойств части тела, подлежащей обработке, коррелированной с информацией, предоставленной первым и вторым устройствами 28, 48 распознавания движения. Формирование и сохранение нового реперного профиля или преобразование существующего профиля может выполняться во время режима настройки или во время первого прохода режима обработки по части тела, подлежащей обработке.
Контроллер 47 блока выполнен с возможностью обращения к данным, сохраненных реперным профилем, относящихся к одному или более свойствам части тела, подлежащей обработке, например, данных о наличии зубного камня, которые коррелированы с сохраненными данными об ускорении и/или угловой ориентации. Контроллер 47 блока выполнен с возможностью обращения к сохраненному реперному профилю и изменения рабочей характеристики зубной щетки 20 в ответ на полученную контроллером информацию, указывающую траекторию и/или ориентацию чистящей головки относительно части тела, подлежащей обработке. При помощи такой конструкции можно изменить интенсивность обработки в зависимости от обнаружения наличия зубного камня вместе с ориентацией и/или положением чистящей головки относительно зубов.
При продолжении обработки возможно преобразование контроллером 47 блока реперного профиля на основании дополнительной коррелированной информации, принятой от датчика 32 и первого и второго устройств 28, 48 распознавания движения. Таким образом, возможно проведение анализа результатов обработки.
Следует понимать, что в вышеупомянутых вариантах осуществления можно учитывать любое перемещение части тела, подлежащей обработке, во время обработки части тела. Это означает, что пользователь может перемещать часть тела, подлежащую обработке, во время обработки, и, таким образом, измерения перемещений обрабатывающей головки могут быть скорректированы с учетом движения части тела, подлежащей обработке. Таким образом, можно поддерживать эффективное отслеживание выполненной обработки.
Следует понимать, что в вышеописанных вариантах осуществления, относящихся к чистке зубов, нижняя челюсть пользователя может перемещаться относительно верхней челюсти. Однако следует понимать, что угол поворота является статичным или крайне ограниченным во время чистки зубов, и, таким образом, влияние на определение информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, будет ничтожно мало.
Кроме того, следует понимать, что положение оси поворота челюсти известно или может быть определено на этапе настройки. Таким образом, контроллер может быть выполнен с возможностью учета любого поворота челюсти и включения в реперный профиль информации, характеризующей поворот челюсти. Таким образом, в случае, когда носимый электронный блок установлен на верхней челюсти, например, можно определить, когда и какой участок нижней челюсти подлежит обработке.
Хотя в вышеописанных вариантах осуществления модуль обратной связи представляет собой реперный элемент, следует понимать, что в альтернативном варианте осуществления модуль обратной связи представляет собой обрабатывающее устройство. Альтернативно, модуль обратной связи может представлять собой отдельный модуль обратной связи, например, модуль обратной связи в мобильном компьютерном устройстве или базовом блоке.
Хотя в вышеописанных вариантах осуществления контроллер, выполненный с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения, представляет собой контроллер блока, следует понимать, что в альтернативной конструкции контроллер, выполненный с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения, представляет собой контроллер устройства. Кроме того, в альтернативной конструкции контроллер содержит контроллер устройства и контроллер блока. Альтернативно, контроллер, выполненный с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения, может представлять собой отдельный контроллер, например, контроллер в мобильном компьютерном устройстве или базовом блоке. В такой конструкции этот контроллер выполнен с возможностью предоставления ему информации, выданной и первым, и вторым устройствами распознавания движения. Информация, указывающая траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, полученной этим отдельным контроллером, может затем быть предоставлена одному или обоим обрабатывающим устройствам или реперному элементу.
Следует принять во внимание, что термин «содержащий» не исключает других блоков или этапов, и что единственное число не исключает множественного числа. Тот факт, что некоторые этапы или средства изложены во взаимно различных зависимых пунктах формулы, не означает, что не может быть использовано сочетание этих этапов или средств для достижения полезного эффекта. Любые ссылочные обозначения, указанные в формуле, не следует истолковывать как ограничивающие объем формулы.
Хотя пункты формулы сформулированы в настоящей заявке под определенное сочетание признаков, следует понимать, что объем раскрытия настоящего изобретения также включает в себя любые новые признаки или любые новые сочетания признаков, раскрытых в настоящем документе, явным образом или косвенным образом, или любое их обобщение независимо от того, относится ли оно к одному изобретению, заявленному в настоящее время в каком-либо пункте формулы, и смягчает ли оно какую-либо или все технические проблемы, как исходное изобретение. Заявители, таким образом, уведомляют, что могут быть сформулированы новые пункты формулы на основании таких признаков и/или сочетаний признаков во время рассмотрения настоящей заявки или любой дополнительной заявки, поданной на основании настоящей заявки.
Группа изобретений относится к медицине, а именно к обработке части тела человека, подлежащей обработке. Предложенная система для реализации способа содержит устройство и включает в себя обрабатывающее устройство, имеющее обрабатывающий блок и реперный элемент, выполненный устанавливаемым на человеке в фиксированном взаимном расположении с частью тела. Обрабатывающее устройство имеет первое устройство распознавания движения, выполненное с возможностью выдачи информации, указывающей ускорение и/или угловую ориентацию обрабатывающего устройства. Реперный элемент имеет второе устройство распознавания движения, выполненное с возможностью выдачи информации, указывающей ускорение и/или угловую ориентацию реперного элемента. Контроллер выполнен с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения. Группа изобретений обеспечивает повышение эффективности обработки части тела человека. 3 н. и 8 з.п. ф-лы., 3 ил.
1. Система (10, 60) для обработки части тела человека, подлежащей обработке, содержащая
обрабатывающее устройство (20, 70), имеющее обрабатывающий блок (22, 72),
реперный элемент (40, 80), выполненный устанавливаемым на человеке в фиксированном взаимном расположении с частью тела, подлежащей обработке,
при этом обрабатывающее устройство имеет первое устройство (28) распознавания движения, выполненное с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию обрабатывающего устройства,
при этом
первое устройство (28) распознавания движения представляет собой одно из шестиосного пространственного датчика, набора инерциальных датчиков, датчиков ускорения, гироскопов или их сочетаний,
реперный элемент имеет второе устройство (48) распознавания движения, выполненное с возможностью выдавать информацию, указывающую ускорение и/или угловую ориентацию реперного элемента,
при этом второе устройство (48) распознавания движения представляет собой одно из шестиосного пространственного датчика, набора инерциальных датчиков, датчиков ускорения, гироскопов или их сочетаний, и
контроллер (27, 47), выполненный с возможностью получать информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения,
при этом обрабатывающее устройство (20, 70) имеет датчик, выполненный с возможностью обнаружения одного или более свойств части тела, подлежащей обработке,
при этом контроллер (27, 47) выполнен с возможностью получать информацию, указывающую упомянутое одно или более свойств части тела, подлежащей обработке, на основании информации, предоставленной датчиком, и
причем
контроллер (27, 47) выполнен с возможностью регулировать одну или более рабочих характеристик обрабатывающего блока (22, 72) в зависимости от обнаруженного датчиком одного или более свойств части тела, подлежащей обработке, и в ответ на полученную контроллером информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке,
причем
обрабатывающее устройство выполнено с возможностью переключения между режимом настройки и режимом обработки,
причем контроллер выполнен с возможностью в режиме настройки преобразовывать существующий сохраненный реперный профиль, указывающий часть тела, подлежащую обработке, на основании полученной контроллером информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, для формирования нового реперного профиля и выполнен с возможностью сохранения нового реперного профиля,
причем контроллер выполнен с возможностью в режиме обработки выбора между двумя или более реперными профилями,
причем выбор между двумя или более реперными профилями осуществляется в ответ на пользовательский ввод.
2. Система (10, 60) по п. 1, дополнительно содержащая модуль (41) обратной связи, при этом контроллер (27, 47) выполнен с возможностью задействовать модуль обратной связи для обеспечения обратной связи с человеком, подлежащим обработке, в ответ на полученную контроллером информацию, указывающую траекторию и/или ориентацию обрабатывающего блока (22, 72) относительно части тела, подлежащей обработке.
3. Система (10, 60) по п. 2, причем модуль (41) обратной связи включает в себя дисплей, а контроллер (27, 47) выполнен с возможностью задействовать дисплей для демонстрации карты части тела, подлежащей обработке, на дисплее и обеспечения указания на этой карте траектории и/или ориентации обрабатывающего блока (22, 72) относительно части тела, подлежащей обработке.
4. Система (10, 60) по любому из предшествующих пунктов,
причем обрабатывающее устройство (20) представляет собой зубную щетку и/или причем реперный элемент (40, 80) представляет собой носимый электронный блок.
5. Система (10, 60) по любому из предшествующих пунктов,
причем контроллер (27, 47) содержит память (31, 51), хранящую реперный профиль (40, 80), указывающий часть тела, подлежащую обработке, при этом контроллер выполнен с возможностью обращения к реперному профилю, хранящемуся в памяти, и сравнения полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока (22, 72) относительно части тела, подлежащей обработке, с реперным профилем.
6. Система по п. 5, причем контроллер (27, 47) выполнен с возможностью отслеживать траекторию и/или угловую ориентацию обрабатывающего блока (22, 72) и сравнивать отслеженную траекторию и/или угол ориентации обрабатывающего блока с реперным профилем, указывающим часть тела, подлежащую обработке, для определения области части тела, подлежащей обработке, которая обработана обрабатывающим устройством (20, 70), на основании отслеженной траектории и/или угла ориентации обрабатывающего блока.
7. Способ обработки части тела человека, подлежащей обработке, использующий систему по п. 1, содержащий выдачу информации, указывающей ускорение и/или угловую ориентацию обрабатывающего устройства (20, 70), с использованием первого устройства (28) распознавания движения,
выдачу информации, указывающей ускорение и/или угловую ориентацию реперного элемента (40, 80), выполненного устанавливаемым на человеке в фиксированном взаимном расположении с частью тела, с использованием второго устройства (48) распознавания движения,
получение информации, указывающей траекторию и/или ориентацию обрабатывающего блока (22, 72) относительно части тела, подлежащей обработке, на основании информации, предоставленной первым и вторым устройствами распознавания движения,
выдачу информации, указывающей одно или более свойств обрабатываемой части тела,
регулирование рабочих характеристик обрабатывающего блока (22, 72) в зависимости от одного или более свойств обрабатываемой части тела и в ответ на полученную контроллером информацию, указывающую траекторию и/или ориентацию обрабатывающего блока относительно части тела.
8. Способ по п. 7, дополнительно содержащий задействование модуля (41) обратной связи для обеспечения обратной связи с человеком, подлежащим обработке, в ответ на полученную информацию, указывающую траекторию и/или ориентацию обрабатывающего блока (22, 72) относительно части тела, подлежащей обработке.
9. Способ по п. 7 или 8, дополнительно содержащий формирование и хранение реперного профиля, указывающего часть тела, подлежащую обработке, на основании полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока (22, 72) относительно части тела, подлежащей обработке, и
обращение к сохраненному реперному профилю, указывающему часть тела, подлежащую обработке, и сравнение полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, с сохраненным реперным профилем.
10. Способ по п. 9, дополнительно содержащий преобразование существующего сохраненного реперного профиля, указывающего часть тела, подлежащую обработке, на основании полученной информации, указывающей траекторию и/или ориентацию обрабатывающего блока относительно части тела, подлежащей обработке, для формирования нового реперного профиля и сохранения нового реперного профиля.
11. Машиночитаемый носитель, содержащий компьютерную программу со средствами программного кода, сконфигурированный для выполнения контроллером этапов способа по пп. 7-10 при выполнении указанной компьютерной программы на контроллере.
| US 2002183959 A1, 05.12.2002 | |||
| US 2012310593 A1, 03.12.2012 | |||
| US 2011010875 A1, 20.01.2011 | |||
| US 2013166220 A1, 27.06.2013 | |||
| US 2010198566 A1, 05.08.2010 | |||
| RU 2013110298 A, 20.09.2014. |

