ИЗМЕНЕННОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для обработки части тела человека. В частности, настоящее изобретение относится к устройству для стрижки волос, включающему в себя, например, триммер для волос или электробритву. Настоящее изобретение также относится к способу обработки части тела, подлежащей обработке, а также компьютерной программе, содержащей команды, которые, при их выполнении по меньшей мере одним процессором, приводят к осуществлению способа обработки части тела человека, подлежащей обработке.
Уровень техники изобретения
Устройства для обработки части тела человека, например, посредством стрижки волос на части тела, подлежащей обработке, включают в себя электрические ручные устройства, например, триммер, которые помещаются рядом с частью тела пользователя и перемещаются по и/или вровень с участками, на которых необходимо подстричь волосы. Такие устройства включают в себя механические устройства для стрижки волос. Пользователь может подравнивать линию роста волос, например, на линии шеи или бакенбарды, посредством перемещения и расположения режущего блока, например, режущего лезвия, относительно части тела и перемещения режущего блока соответственно.
Однако при стрижке волос на самом себе или волос на ком-нибудь еще для обеспечения подобающего результата пользователю требуется значительное мастерство. Например, представляет затруднение точно располагать такие устройства на голове пользователя. Точность обработки, обеспеченная посредством устройства, зависит от мастерства пользователя и твердости его руки. Кроме того, устройство и рука и плечо пользователя могут заслонять обзор пользователю, тем самым делая затруднительным точное расположение и направление устройства.
Следует отметить, что в американской опубликованной заявке на патент US 2012/0227554 A1 раскрыто устройство для бритья, содержащее по меньшей мере один датчик уровня и пару разноцветных светодиодных светильников. В соответствии с этим документом, устройство выполняется с возможностью зажигать светодиодный светильник определенного цвета на основании фактического показания по меньшей мере одного датчика уровня, предназначенного для индикации состояния уровня.
Сущность изобретения
Задача изобретения заключается в обеспечении устройства для обработки части тела человека, подлежащей обработке, и/или способа обработки части тела человека, подлежащей обработке, которые в значительной степени уменьшают или преодолевают проблемы, упомянутые выше.
В соответствии с одним аспектом настоящего изобретения, обеспечивается устройство для обработки части тела человека, подлежащей обработке, содержащее обрабатывающий блок, средство распознавания углового положения, выполненное с возможностью генерирования информации, указывающей на угловое положение обрабатывающего блока, а также средство управления, выполненное с возможностью регулирования одного или более параметров устройства в ответ на информацию, указывающую на угловое положение обрабатывающего блока, обеспеченную посредством средства распознавания углового положения.
При такой схеме размещения возможно определять угловое положение обрабатывающего блока и, следовательно, регулировать работу устройства в ответ на определенное угловое положение. Это означает, что на основании определенного углового положения возможно усовершенствовать обработку, которая проводится посредством устройства.
Средство распознавания углового положения содержит датчик углового положения, выполненный с возможностью генерирования информации, указывающей на угловое положение обрабатывающего блока по отношению к горизонтали.
Следовательно, является возможным без труда и точно определить угловое положение обрабатывающего блока.
Средство управления выполняется с возможностью обращения к эталонному профилю, указывающему на необходимое угловое положение обрабатывающего блока, с целью генерирования информации, указывающей на угловое положение обрабатывающего блока относительно необходимого углового положения, на основании информации, сгенерированной посредством средства распознавания углового положения, и эталонного профиля, а также с возможностью регулирования одного или более параметров устройства в ответ на информацию, сгенерированную посредством средства управления.
Следовательно, возможно обращаться к необходимому угловому положению и приводить в действие устройство в зависимости как от необходимого углового положения, так и от определенного углового положения. Это означает, что является возможным управлять устройством в зависимости от необходимого углового положения.
Устройство содержит пользовательский ввод, при этом средство управления может быть выполнено с возможностью изменения и/или формировать эталонный профиль на основании пользовательского ввода.
При данной схеме размещения является возможным определить необходимое угловое положение. Следовательно, это дает возможность пользователю определять и задавать необходимое угловое положение и/или изменять необходимый угол при желании.
Средство управления может быть выполнено с возможностью регулирования одного или более параметров устройства, в случае, если средство управления определяет, что информация, сгенерированная посредством средства распознавания углового положения, соответствует эталонному профилю.
При такой схеме размещения является возможным точно определить, когда режущий блок находится в необходимом угловом положении. Более того, пользователь не нуждается в непосредственном обзоре части тела, подлежащей обработке.
Средство управления может включать в себя процессор и память.
Устройство может дополнительно содержать приводное средство обрабатывающего блока. Средство управления может быть выполнено с возможностью приведения в действие приводного средства обрабатывающего блока в случае, когда средство управления определяет, что информация, сгенерированная посредством средства распознавания углового положения, соответствует эталонному профилю.
Следовательно, обрабатывающий блок может быть приведен в действие только в случае, если обрабатывающий блок находится в правильном положении, необходимом пользователю. Это означает, что обработка не будет проведена в случае, если обрабатывающий блок находится в неправильном положении, и, таким образом, это способствует предотвращению проведения неправильной обработки части тела, подлежащей обработке.
Средство управления может быть выполнено с возможностью регулирования одного или более параметров устройства в случае, если средство управления определяет, что информация, сгенерированная посредством средства распознавания углового положения, отличается от эталонного профиля.
Следовательно, является возможным регулировать параметр устройства в случае, если обрабатывающий блок находится в неправильном положении. Например, пользователь может быть проинформирован посредством устройства, если устройство находится в неправильном положении, и, таким образом, пользователь будет проинформирован, что не следует проводить обработку части тела, подлежащей обработке.
Обрабатывающий блок может иметь в составе обрабатывающую кромку, при этом угловое положение обрабатывающего блока может определяться угловым положением обрабатывающей кромки. Обрабатывающая кромка может быть линейной.
Средство управления может быть выполнено с возможностью обращения к информации, указывающей на угловое положение обрабатывающего блока, сгенерированной посредством средства распознавания углового положения, а также изменять и/или сохранять в памяти эталонный профиль на основании информации, указывающей на угловое положение обрабатывающего блока.
Такая схема размещения способствует тому, чтобы эталонный профиль имел возможность повторяться, при этом такой профиль подлежит сохранению для использования на последующем этапе посредством средства управления.
Средство распознавания углового положения может содержать датчик обнаружения индикатора, выполненный с возможностью обнаружения индикатора, определяющего необходимый угол на части тела.
Такая схема размещения способствует легкому и точному определению углового положения обрабатывающего блока относительно части тела, подлежащей обработке.
Индикатор может представлять собой вещество, нанесенное на часть тела, или может представлять собой проецируемую метку, спроецированную на часть тела.
Это означает, что пользователь может без труда регулировать и определять угловое положение, и, следовательно, местоположение, в котором пользователь считает необходимым провести обработку на части тела, подлежащей обработке. Например, при использовании триммера для волос пользователь способен без труда обозначить необходимую линию стрижки, которая должна быть применена к волосам.
Устройство может дополнительно содержать модуль обратной связи. Один или более из параметров устройства, с возможностью регулировки которых выполняется средство управления, может представлять собой приведение в действие модуля обратной связи с целью обеспечения обратной связи с человеком, подлежащим обработке, в ответ на информацию, указывающую на угловое положение обрабатывающего блока.
Следовательно, является возможным указывать пользователю, когда обрабатывающий блок находится в правильном угловом положении, а значит, когда следует проводить обработку. В качестве альтернативы, является возможным указывать пользователю, когда обрабатывающий блок находится в неправильном угловом положении, а значит, когда не следует проводить обработку.
Модуль обратной связи может быть выполнен с возможностью обеспечивать визуальную, звуковую и/или тактильную обратную связь.
Устройство может дополнительно содержать ручку и исполнительное средство. Исполнительное средство может быть выполнено с возможностью перемещения обрабатывающего блока относительно ручки, и при этом один или более из параметров устройства, с возможностью регулировки которых выполняется средство управления, могут представлять собой приведение в действие исполнительного средства с целью перемещения обрабатывающего блока относительно ручки.
При такой схеме размещения пользователю предоставляется возможность изменять угловое положение ручки в то время, как угловое положение обрабатывающего блока сохраняется. Это способствует предотвращению проведения пользователем неправильной обработки, возникающей в результате перемещения пользователя.
Обрабатывающий блок может иметь возможность поворота относительно ручки.
Следовательно, обрабатывающий блок имеет возможность свободного перемещения относительно ручки.
Устройство для обработки может применяться в режиме настройки, в котором средство управления выполнено с возможностью формировать и сохранять эталонный профиль, указывающий на необходимое угловое положение, на основании информации, указывающей на угловое положение обрабатывающего блока, сгенерированной посредством средства распознавания углового положения, а также может применяться в режиме обработки, в котором средство управления выполнено с возможностью обращения к сохраненному эталонному профилю и сравнения сгенерированной информации, указывающей на угловое положение обрабатывающего блока, с сохраненным эталонным профилем.
При такой схеме размещения является возможным определять точное необходимое угловое положение и, следовательно, это предоставляет возможность пользователю сохранять необходимое угловое положение для использования.
В режиме настройки средство управления может быть выполнено с возможностью изменения существующего сохраненного эталонного профиля на основании информации, указывающей на угловое положение обрабатывающего блока, сгенерированной посредством средства распознавания углового положения, с целью формирования нового эталонного профиля, а также может быть выполнено с возможностью сохранения нового эталонного профиля.
При такой схеме размещения является возможным для пользователя изменять существующий профиль с целью формирования нового профиля. Новый профиль может заменить существующий профиль или может быть сохранен наряду с ним.
Средство управления может быть выполнено с возможностью выбора между двумя или более эталонными профилями. Выбор между двумя или более эталонными профилями может осуществляться в ответ на пользовательский ввод.
Следовательно, возможно, чтобы система использовалась более чем одним пользователем и/или применялась для осуществления различных видов обработки.
Устройство может представлять собой устройство для обработки волос. Обрабатывающий блок может представлять собой блок для обработки волос.
Устройство может содержать визуальный маркер, выполненный с возможностью отображения углового положения обрабатывающего блока относительно части тела, подлежащей обработке, на части тела, подлежащей обработке. Визуальный маркер может представлять собой лазерный маркер.
Следовательно, является возможным обеспечить пользователя визуальной индикацией того, что обработка проводится правильно, и предоставить возможность пользователю проверять, что средство управления обращается к правильному эталонному профилю.
В соответствии с другим аспектом настоящего изобретения, обеспечивается система, предназначенная для обработки части тела человека, подлежащей обработке, содержащая обрабатывающее устройство, имеющее в составе обрабатывающий блок, основной блок, средство распознавания углового положения, выполненное с возможностью генерирования информации, указывающей на угловое положение обрабатывающего блока, а также средство управления, выполненное с возможностью регулирования одного или более параметров системы в ответ на информацию, указывающую на угловое положение обрабатывающего блока, обеспеченную посредством средства распознавания углового положения.
Система может содержать генератор индикатора, выполненный с возможностью определения необходимого угла на части тела. Генератор индикатора может находиться на основном блоке.
В соответствии с другим аспектом настоящего изобретения, обеспечивается способ обработки части тела человека, подлежащей обработке, включающий генерирование информации, указывающей на угловое положение обрабатывающего блока, входящего в состав устройства для обработки, с использованием средства распознавания углового положения, а также регулирование одного или более параметров устройства для обработки в ответ на информацию, указывающую на угловое положение обрабатывающего блока, обеспеченную посредством средства распознавания углового положения.
В соответствии с другим аспектом настоящего изобретения, обеспечивается компьютерная программа, содержащая команды, которые при их выполнении посредством по меньшей мере одного процессора приводят к осуществлению способа по п.12 формулы изобретения.
Эти и другие аспекты изобретения явствуют и разъясняются со ссылкой на варианты осуществления, которые описываются в настоящем документе ниже.
Краткое описание чертежей
Далее будут описаны варианты осуществления изобретения, только в качестве примера, со ссылкой на сопроводительные чертежи, на которых изображено следующее:
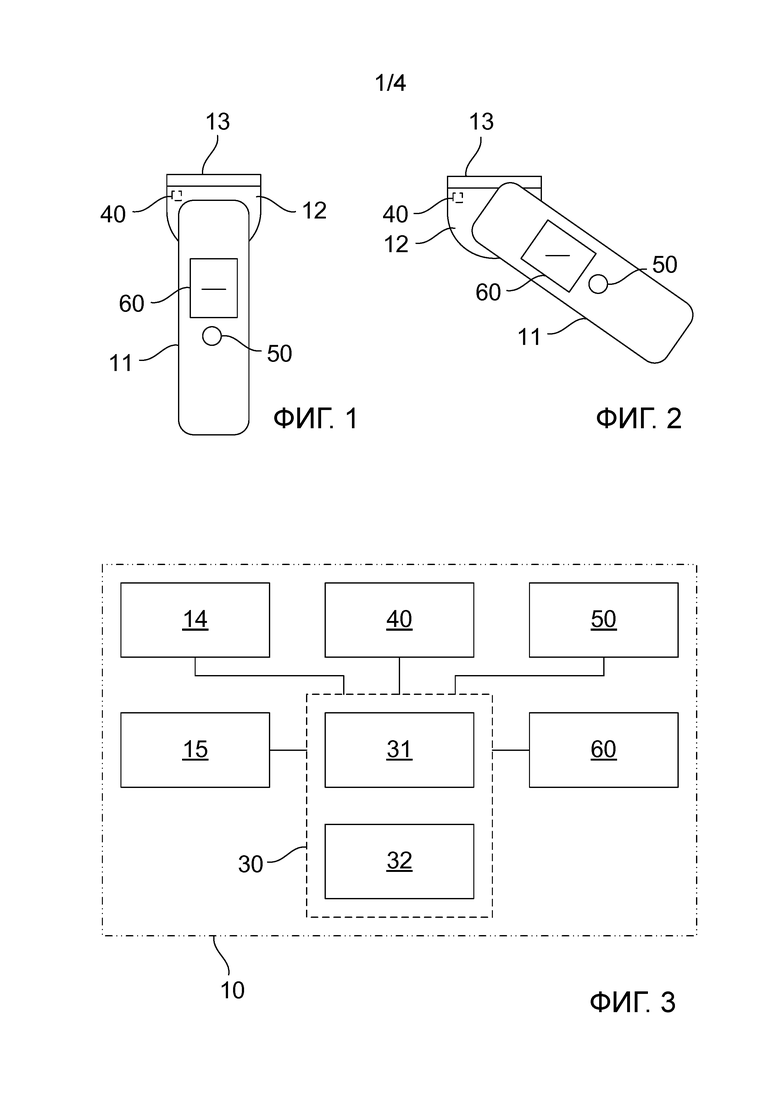
Фиг.1 изображает схематический вид одного устройства для стрижки волос в первом режиме;
Фиг.2 изображает схематический вид устройства для стрижки волос, изображенного на Фиг.1, во втором режиме;
Фиг.3 изображает схематическую принципиальную блок-схему устройства, изображенного на Фиг.1;
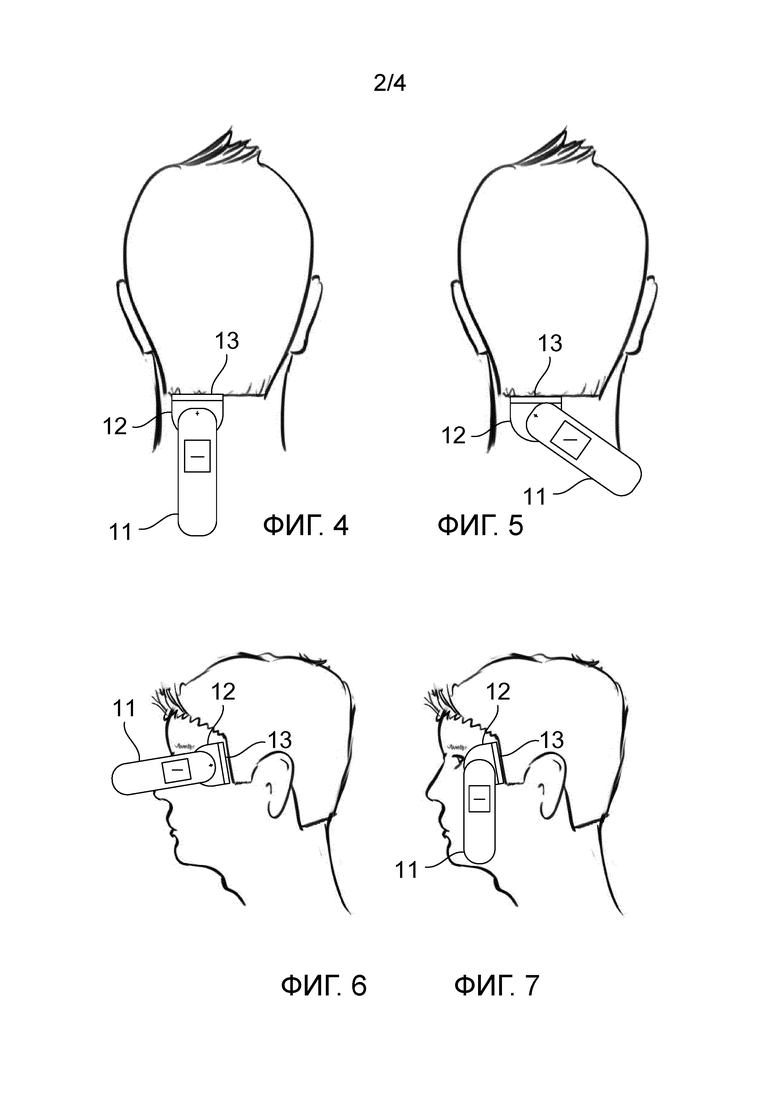
Фиг.4 изображает схематический вид устройства, изображенного на Фиг.1, находящегося в использовании в первом режиме;
Фиг.5 изображает схематический вид устройства, изображенного на Фиг.1, находящегося в использовании во втором режиме;
Фиг.6 изображает схематический вид устройства, изображенного на Фиг.1, находящегося в использовании в третьем режиме;
Фиг.7 изображает схематический вид устройства, изображенного на Фиг.1, находящегося в использовании в четвертом режиме;
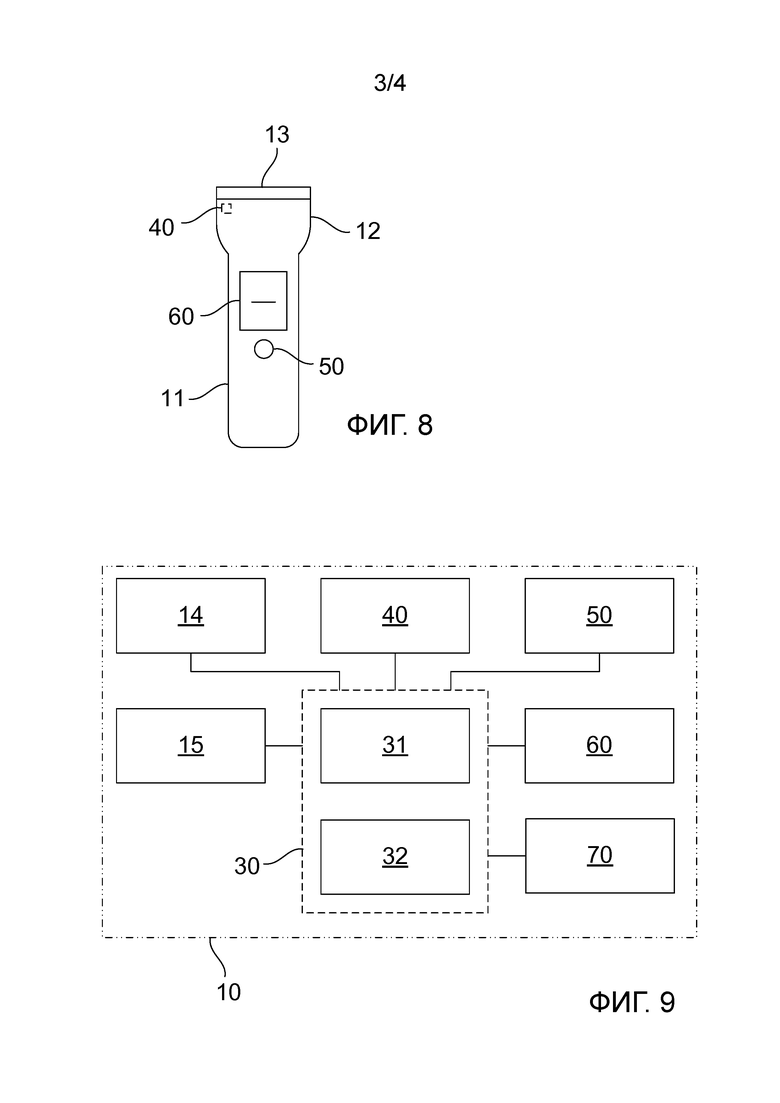
Фиг.8 изображает схематический вид другого устройства для стрижки волос;
Фиг.9 изображает схематическую принципиальную блок-схему другого устройства для стрижки волос;
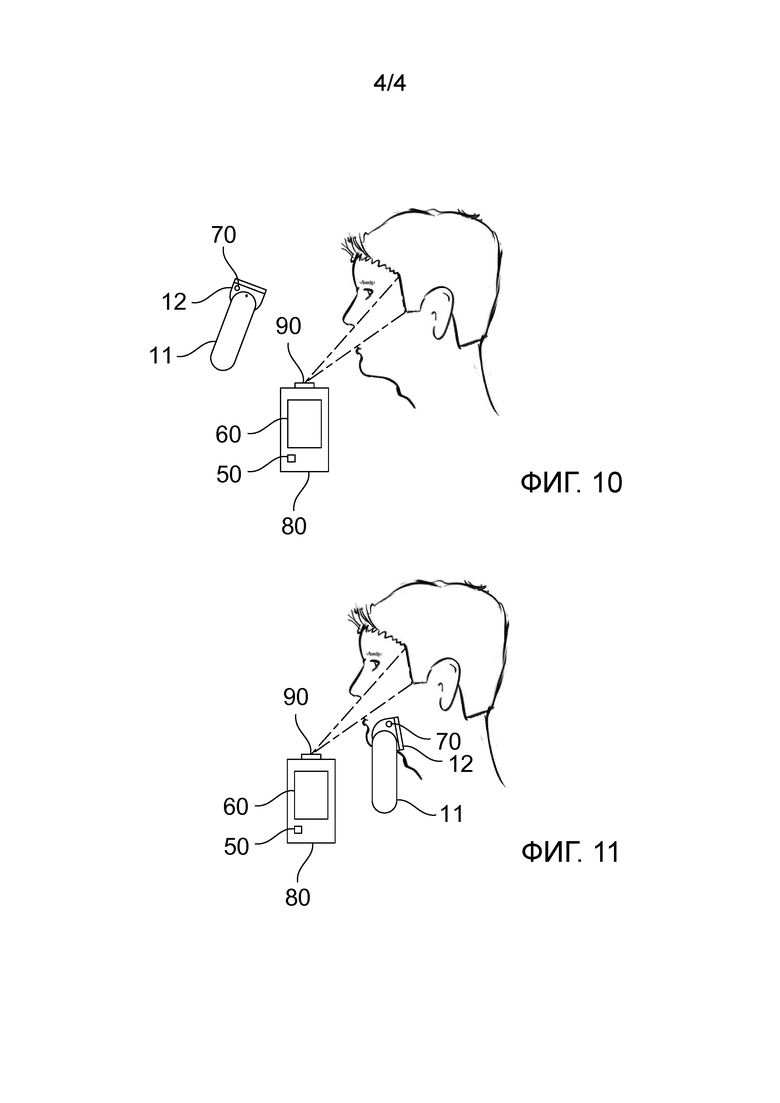
Фиг.10 изображает схематический вид системы для стрижки волос в первом режиме; и
Фиг.4 изображает схематический вид системы для стрижки волос, изображенной на Фиг.10, во втором режиме.
Подробное описание вариантов осуществления
Варианты осуществления, описанные в данном документе, описывают устройство и/или систему для стрижки волос. Однако следует понимать, что устройство и/или система, описанные в данном документе, не ограничиваются применением только для стрижки волос, а могут использоваться в различных сферах применения. Другими словами, устройство применяется в устройствах для обработки части тела человека, подлежащей обработке. Например, варианты осуществления, описанные в данном документе, применимы, например, в эпиляторе, бритве, триммере, эксфолиаторе, устройстве для микродермабразии, лазерном устройстве для стрижки волос, увлажнителе, устройстве, основанном на интенсивном импульсном излучении, зубной щетке или в любом другом электрическом устройстве, которое воздействует на часть пользователя, подлежащую обработке. Устройство для обработки может наносить на часть тела, подлежащую обработке, вещество, такое как, например, красящее вещество, шампунь, медицинское вещество или любое другое вещество. Возможные альтернативные варианты использования включают в себя устройства, такие как, например, зубная щетка, флоссер, бритва, альтернативные виды удаления волос, включающие в себя стрижку, очищение кожи, искусственный загар кожи и/или омоложение кожи, объединяющие один или более не инвазивных и инвазивных видов обработки. В таких вариантах осуществления обработка части тела может включать в себя применение излучения, применение лосьона или других жидкостей и/или прокалывание.
На Фиг.1-3 изображается устройство 10 для стрижки волос. Устройство 10 для стрижки представляет собой ручное электрическое устройство для стрижки волос. Устройство 10 содержит ручку 11, формирующую основной аппарат, а также режущую головку 12. Следует понимать, что устройство может формировать часть системы, включающей в себя устройство 10. Устройство 10 дополнительно содержит средство 30 управления. Средство 30 управления выполняется с возможностью приведения в действие устройства 10 для стрижки.
В вариантах осуществления, описанных в данном документе, устройство 10 описывается посредством ссылки на пользователя системой 10, являющегося обрабатываемым человеком. Другими словами, пользователь использует устройство для обработки самого себя. Однако следует понимать, что в альтернативных вариантах осуществления пользователь представляет собой человека, использующего устройство 10 с целью проведения обработки другого человека с использованием устройства 10.
В настоящем варианте осуществления устройство 10 представляет собой триммер для волос. Ручка 11 формирует корпус, предназначенный для вмещения рабочих компонентов устройства 10. Ручка 11 имеет удлиненную форму. Ручка 11 задает продольную ось. Следует понимать, что схема размещения ручки 11 может различаться, например, ручка 11 может быть сферической формы. Ручка 11 имеет внешнюю поверхность, задающую рукоятку. Ручка 11 и режущая головка 12 размещаются таким образом, чтобы пользователь был способен держать рукоятку.
Режущая головка или блок 12 функционирует в качестве обрабатывающей головки или блока. Режущий блок 12 находится на одном конце ручки 11. Режущий блок 12 перемещается по коже части тела пользователя, например, его головы, чтобы подстричь волосы на части тела. Режущий блок 12 выполняется с возможностью подстригать волосы. Режущий блок 12 имеет в составе один или более неподвижный обрабатывающий элемент(ы) (не изображен), а также один или более подвижный обрабатывающий элемент(ы), который перемещается относительно одного или более неподвижного обрабатывающего элемента(ов). Волосы, выступающие за неподвижный обрабатывающий элемент, отрезаются посредством подвижного обрабатывающего элемента. В частности, в одном варианте осуществления режущий блок 12 содержит неподвижное лезвие, функционирующее в качестве неподвижного обрабатывающего элемента, а также подвижное лезвие, функционирующее в качестве подвижного обрабатывающего элемента. Неподвижное лезвие имеет неподвижную кромку, содержащую первый ряд зубьев. Подвижное лезвие имеет подвижную кромку, содержащую второй ряд зубьев. Неподвижная кромка и подвижная кромка установлены параллельно друг другу. Подвижное лезвие имеет возможность возвратно-поступательного движения относительно неподвижного лезвия при соприкосновении с волосами в процессе стрижки. Следовательно, второй ряд зубьев выполняется с возможностью перемещаться в возвратно-поступательном движении относительно первого ряда зубьев. В настоящем варианте осуществления неподвижный обрабатывающий элемент и подвижный обрабатывающий элемент формируют взаимодействующие механические режущие части (не изображены).
Несмотря на то что выше описан один режущий блок, следует понимать, что режущее устройство 10 может содержать два или более режущих блоков 12. Несмотря на то что в настоящей схеме размещения режущий блок содержит один или более неподвижный обрабатывающий элемент(ы) и один или более подвижный обрабатывающий элемент(ы), следует понимать, что предусматриваются альтернативные режущие схемы размещения. Например, режущий блок 12 может содержать фольгу (не изображена), через которую выступают волосы, а также подвижное лезвие (не изображено), которое перемещается по фольге.
Режущий блок 12 имеет обрабатывающую кромку 13. Обрабатывающая кромка 13 определяет часть режущего блока 12, на которой происходит обработка. В варианте осуществления, имеющем взаимодействующие неподвижное и подвижное лезвия, обрабатывающая кромка 13 является ведущей кромкой, сформированной посредством вершин зубьев лезвий. Угловое положение режущего блока 12 задается посредством углового положения обрабатывающей кромки 13. Обрабатывающая кромка 13 как правило является линейной, тем не менее может иметь и альтернативный профиль, например, изогнутый.
Режущий блок 12 приводится в действие посредством приводного средства 14 режущего блока. Приводное средство 14 функционирует с целью приведения в действие режущего блока. В настоящем варианте осуществления приводное средство 14 представляет собой электродвигатель. Приводное средство 14 приводит в действие подвижный элемент(ы) относительно неподвижного элемента(ов) в возвратно-поступательном движении. Приводное устройство 14 приводится в действие посредством средства 30 управления.
Расположение режущего блока 12 относительно ручки 11 поддается регулированию. Другими словами, режущий блок 12 является подвижным относительно ручки 11. Режущий блок 12 крепится к ручке 11 с возможностью вращения. Шарнир (не изображен) закрепляет режущий блок 12 на ручке 11. Исполнительное средство 15 применяется с целью перемещения режущего блока 12 относительно ручки 11. Исполнительное средство 15 находится в ручке 11 и функционирует на режущем блоке 12, тем не менее возможны и другие схемы размещения. Исполнительное средство 15 представляет собой исполнительное средство с возможностью вращения, при этом может представлять собой, например, механическое исполнительное средство или электромагнитное исполнительное средство. В настоящем варианте осуществления исполнительное средство 15 представляет собой серводвигатель. Исполнительное средство 15 управляет относительным расположением режущего блока относительно ручки 11. Исполнительное средство 15 может формировать шарнир. Исполнительное средство 15 приводится в действие электрическим способом. Исполнительное средство 15 перемещает режущий блок 12 в ответ на команды, полученные от средства 30 управления.
При упомянутой выше схеме размещения, режущий блок 12 перемещается относительно ручки 11. На фиг.1 режущий блок 12 изображается в первом положении относительно ручки 11, в то время как на фиг.2 режущий блок 12 изображается во втором положении относительно ручки 11. Как изображено на фиг.1 и 2, угловое положение режущего блока 12 по отношению к горизонтали является постоянным в обоих положениях.
Устройство 10 для стрижки дополнительно содержит источник электропитания (не изображен), такой как, например, батарея. Батарея является перезаряжаемой. В настоящих вариантах осуществления источник электропитания представляет собой встроенную перезаряжаемую батарею, однако следует понимать, что возможно альтернативное средство электропитания, например, кабель электропитания, который соединяет устройство 10 для стрижки с внешним источником электроэнергии.
Фиг.3 изображает схематическую диаграмму отдельных компонентов устройства 10. Устройство 10 включает в себя средство 30 управления, датчик 40 углового положения, пользовательский ввод 50 и один или более модулей 60 обратной связи, включающих в себя, например, динамик и/или дисплей.
Средство 30 управления содержит процессор 31 и память 32. Средство 30 управления применяется с целью приведения в действие устройства 10 для стрижки.
Процессор 31 может принимать любую подходящую форму. К примеру, процессор 31 может представлять собой или включать в себя микроконтроллер, многочисленные микроконтроллеры, схему, отдельный процессор или многочисленные процессоры. Средство 30 управления может быть сформировано из одного или из многочисленных модулей.
Память 32 принимает любую подходящую форму. Память 32 может включать в себя энергонезависимую память и/или оперативную память RAM. Энергонезависимая память может включать в себя память ROM, накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Помимо всего прочего, память хранит операционную систему. Память может быть размещена удаленно. Память RAM используется процессором 31 для временного хранения данных. Оперативная система может вмещать код, который при исполнении посредством средства 30 управления управляет функционированием каждого из аппаратных компонентов, входящих в состав устройства 10 для стрижки, или, в качестве альтернативы, системой, включающей в себя устройство 10 для стрижки. Средство 30 управления может быть способно побудить один или более объект, такой как, например, один или более профиль, храниться удаленно или локально посредством памяти 32. Средство 30 управления может быть способно обращаться к одному или более объектам, таким как, например, один или более профили, сохраненным посредством энергонезависимой памяти, и загружать один или более сохраненные объекты в память RAM.
Средство 30 управления применяется с целью приведения в действие устройства 10 для стрижки в ответ на ввод данных, например, пользовательский ввод 50. Средство 30 управления выполняется с возможностью приведения в действие приводного средства 14 обрабатывающей головки.
Пользовательский ввод 50 содержит некоторую форму пользовательского интерфейса. В некоторых случаях устройство 10 включает в себя средства управления и/или отображения, предназначенные для регулирования некоторых рабочих параметров устройства, таких как, например, мощность. Пользовательский ввод 50 предоставляет возможность пользователю оказывать воздействие на устройство 10, например, включать устройство 10 или выключать его. Пользовательский ввод 50 может, например, представлять собой кнопку, сенсорную панель или переключатель.
Модуль 60 обратной связи выполняется с возможностью обеспечивать пользователю обратную связь. Обратная связь может представлять собой один или более из вариантов индикации: звуковую индикацию, визуальную индикацию или тактильную индикацию. В одном варианте осуществления модуль обратной связи включает в себя дисплей (не изображен). Дисплей приводится в действие в ответ на сигналы, принимаемые от средства 30 управления, с целью формирования для пользователя визуальных индикаторов или сигналов. Следует понимать, что в некоторых вариантах осуществления дисплей может быть опущен.
В одном варианте осуществления модуль 60 обратной связи включает в себя динамик (не изображен). Динамик приводится в действие в ответ на сигналы, принимаемые от средства 30 управления, с целью формирования для пользователя звуковых индикаторов или сигналов. Следует понимать, что в некоторых вариантах осуществления динамик может быть опущен. В настоящей схеме размещения динамик размещается на ручке 11, входящей в состав устройства 10. Следовательно, динамик будет размещен близко к голове пользователя, чтобы предоставить пользователю возможность свободно слышать звуковые сигналы, сгенерированные посредством динамика.
В одном варианте осуществления модуль 60 обратной связи включает в себя вибродвигатель (не изображен), например, для обеспечения тактильной обратной связи с пользователем (не изображено). Вибродвигатель приводится в действие в ответ на сигналы, принимаемые от средства 30 управления, с целью формирования для пользователя тактильных индикаторов или сигналов. Следует понимать, что в некоторых вариантах осуществления вибродвигатель может быть опущен. В настоящей схеме размещения вибродвигатель размещается на ручке 11. В одном альтернативном варианте вибродвигатель находится в обрабатывающем блоке 12. Следовательно, тактильные сигналы будут свободно обнаруживаться пользователем. Следует понимать, что различные части модуля 60 обратной связи могут размещаться отдельно друг от друга.
Датчик 40 углового положения находится в обрабатывающем блоке 12, входящем в состав устройства 10. Следовательно, датчик 40 углового положения способен непосредственно определять угловое положение обрабатывающего блока 12. В качестве альтернативы, датчик 40 углового положения находится в ручке 11. В такой схеме размещения угловое положение обрабатывающего блока 12 определяется на основании углового положения обрабатывающего блока 12 наряду с информацией, указывающей на вращение обрабатывающего блока 12 относительно ручки 11. Датчик 40 углового положения является частью или формирует часть средства распознавания углового положения.
Датчик 40 углового положения представляет собой датчик пространственного положения по 6 осям. Датчики пространственного положения известны, и, таким образом, подробное описание будет опущено. Датчик 40 углового положения выполняется с возможностью обеспечения показаний по шести осям относительного движения (три оси поступательного перемещения и три оси вращения). Датчик 40 углового положения выполняется с возможностью генерирования информации, указывающей на угловое положение обрабатывающей головки 12. Информация, сгенерированная посредством датчика 40 углового положения, передается на средство 30 управления.
Несмотря на то что в настоящем и других описанных вариантах осуществления датчик 40 углового положения представляет собой датчик пространственного положения по 6 осям, следует понимать, что могут использоваться и альтернативные датчики. Датчик 40 углового положения может включать в себя один или более различных датчиков, например, инерциальные датчики, датчики положения, акселерометры, гироскопы или комбинацию из этих датчиков. Подробное описание альтернативных видов опущено.
Датчик 40 углового положения размещается в обрабатывающем блоке 12 в предварительно заданных позиции и положении. Следовательно, положение обрабатывающего блока может быть без труда определено на основании известного положения и позиции датчика 40 углового положения. Другими словами, обрабатывающий блок 12 находится в известной схеме размещения относительно датчика 40 углового положения.
Несмотря на то что в вариантах осуществления, описанных в данном документе, средство 30 управления, пользовательский ввод 50, а также один или более модулей 60 обратной связи находятся на устройстве 10 для стрижки, следует понимать, что в альтернативных вариантах осуществления средство 30 управления, пользовательский ввод 50 и/или один или более модулей 60 обратной связи могут находиться на одном или более отдельных блоках. Например, в одном варианте осуществления средство 30 управления, пользовательский ввод 50, а также один или более модулей 60 обратной связи находятся на основном блоке (например, ссылаясь на фиг.10). Основной блок может представлять собой мобильное устройство, такое как, например, мобильный телефон или планшетный компьютер. В такой схеме размещения устройство 10 для стрижки будет дополнительно содержать модуль связи, предназначенный для связи с основным блоком. Связь между устройством 10 для стрижки и основным блоком может представлять собой проводное соединение или беспроводное соединение. Средство 30 управления может находиться на устройстве 10 для стрижки, на основном блоке или может включать в себя основное средство управления, находящееся на основном блоке, и средство управления устройством, находящееся на устройстве 10 для стрижки. Подобным образом, один или более модулей обратной связи и/или пользовательских вводов могут размещаться на основном блоке. Это оказывает помощь пользователю в управлении пользовательским вводом или в приеме обратной связи.
Устройство 10, изображенное на фиг.1-3, приводится в действие посредством ручного устройства 10 для стрижки, которое держит пользователь. Пользователь использует устройство 10, держа ручное устройство 10 для стрижки и посредством перемещения режущего блока 12 вплотную по зонам части тела, с которых необходимо срезать волосы.
Устройство 10 приводится в действие пользователем. Устройство 10 приводится в действие посредством применения пользовательского ввода 50. Средство 30 управления выполняется с возможностью управления приводным средством 14 обрабатывающего блока с целью приведения в действие режущего блока 12 в режиме стрижки. Следует понимать, что режущий блок 12 может иметь более, чем один режим обработки. Средство 30 управления приводит в действие исполнительное средство 15 для определения расположения режущего блока 12 относительно ручки 11.
Режущий блок 12 первоначально находится в нейтральном положении. В нейтральном положении режущая кромка 13 проходит перпендикулярно к продольной оси ручки 11. Однако следует понимать, что направление нейтрального положения может различаться. Средство 30 управления первоначально перемещает режущий блок 12 в нейтральное положение в случае, если режущий блок 12 не находится в нейтральном положении.
В одном варианте осуществления устройство 10 применяется в ручном рабочем режиме, в котором устройство 10 для стрижки приводится в действие вместе с режущим блоком 12, удерживаемом в его нейтральном положении. Ручной рабочий режим может быть выбран в ответ на пользовательский ввод. В таком режиме пользователь может направлять и располагать устройство 10 в необходимом направлении и положении, а также использовать режущий блок 12 для стрижки волос на части тела, подлежащей обработке, например, на шее и/или голове пользователя по желанию.
В таком режиме или при использовании традиционного триммера затруднительно рассчитать и управлять положением режущего блока 12, а, следовательно, и режущей кромки 13. При перемещении устройства надлежащим образом пользователь полагается на свое мастерство и твердость руки. Это может оказаться затруднительным в случае, когда держишь устройство, поскольку любое лишнее перемещение кожи или руки может вызвать ошибку. Более того, устройство и/или рука или плечо пользователя могут заслонять обзор пользователю при пользовании устройством, а это может привести к тому, что устройство будет находиться в нежелательном положении, и может вызвать неточности или ошибки. Следовательно, представляет затруднение использование такого устройства для достижения аккуратной стрижки волос.
Устройство 10 применяется в рабочем режиме с постоянным углом. Средство 30 управления применяется для приведения в действие устройства 10 в рабочем режиме с постоянным углом в ответ на пользовательский ввод. В качестве альтернативы, или в дополнение, средство 30 управления применяется для приведения в действие устройства 10 в рабочем режиме с постоянным углом в качестве стандартного рабочего режима. Рабочий режим с постоянным углом может быть выбран в ответ на пользовательский ввод.
В рабочем режиме с постоянным углом средство 30 управления выполняется с возможностью удерживания режущего блока 12 в постоянном угловом положении по отношению к горизонтали. Средство 30 управления выполняется с возможностью приведения в действие исполнительного средства 15 для перемещения положения режущего блока 12 относительно ручки 11. Исполнительное средство 15 приводится в действие посредством средства 30 управления в ответ на информацию, указывающую на угловое положение режущего блока 12, обеспеченную посредством датчика 40 углового положения, функционирующего в качестве средства распознавания углового положения.
Информация, указывающая на необходимое угловое положение, хранится в памяти 32 в эталонном профиле. Средство 30 управления выполняется с возможностью обращения к эталонному профилю необходимого углового положения. Эталонный профиль может храниться в таблице поиска. Эталонный профиль может храниться посредством памяти 32. В такой схеме размещения средство 30 управления выполняется с возможностью обращения к памяти 32 для доступа к эталонному профилю. В одном варианте осуществления эталонный профиль хранится посредством памяти RAM.
Эталонный профиль обеспечивает информацию, указывающую на необходимое угловое положение. В настоящем варианте осуществления информация, указывающая на необходимое угловое положение, относится к углу по отношению к горизонтали, например, составляющему 0 градусов, 10 градусов или 23 градуса.
Следует понимать, что средство 30 управления может быть выполнено с возможностью выбора эталонного профиля из двух или более эталонных профилей. Два или более эталонных профилей могут храниться в памяти 32. В качестве альтернативы, эталонный профиль может включать в себя два или более необходимых угловых положений, из которых средство 30 управления способно выбирать.
Средство 30 управления выполняется с возможностью выбора необходимого углового положения в ответ на приведение в действие пользователем пользовательского ввода 50. Эталонный профиль, к которому обращается средство 30 управления, или необходимое угловое положение, выбранное из области значений в эталонном профиле, могут быть выбраны в ответ на приведение в действие пользовательского ввода 50. Например, в одном варианте осуществления пользовательский ввод 50 включает в себя дисковый регулятор, предназначенный для установки необходимого углового положения. В качестве альтернативы, могут использоваться кнопки вверх-вниз для выбора необходимого углового положения из области значений угловых положений. Средство 30 управления может приводить в действие модуль 60 обратной связи, например, посредством приведения в действие дисплея, для обеспечения индикации выбранного необходимого углового положения в ответ на приведение в действие пользовательского ввода 50. Следовательно, имеется возможность ручного выбора необходимого углового положения.
Несмотря на то что в настоящем варианте осуществления имеется возможность ручного выбора необходимого углового положения в ответ на приведение в действие пользовательского ввода 50, следует понимать, что предусматриваются альтернативные схемы размещения. Например, в альтернативной схеме размещения эталонный профиль формируется или изменяется на основании информации, сгенерированной посредством датчика 40 углового положения. В такой схеме размещения устройство 10 приводится в действие в режиме настройки в ответ на приведение в действие пользовательского ввода 50. В режиме настройки средство 30 управления блоком выполняется с возможностью создавать эталонный профиль или изменять существующий эталонный профиль.
В режиме настройки средство 30 управления удерживает режущий блок 12 в фиксированном взаимном расположении с ручкой 11. Другими словами, исполнительное средство 15 не функционирует. Пользователь вручную направляет устройство 10 таким образом, чтобы режущая кромка 13, входящая в состав режущего блока 12, находилась в необходимом угловом положении. Это может служить для расположения по одной линии с линией роста волос или другим элементом. Затем пользователь приводит в действие пользовательский ввод 50. Приведение в действие пользовательского ввода 50 обеспечивает средство 30 управления индикацией, что режущий блок 12 находится в необходимом угловом положении. В таком случае средство 30 управления выполняется с возможностью обращения к информации, сгенерированной посредством датчика 40 углового положения, при этом данная информация сохраняется посредством средства 30 управления в качестве эталонного профиля, указывающего на необходимое угловое положение. Следует понимать, что вместо формирования нового эталонного профиля, средство 30 управления может изменять информацию, записанную в существующем сохраненном эталонном профиле. Следовательно, средство 30 управления способно обращаться к информации, записанной в эталонном профиле, с целью ее использования в качестве информации, указывающей на необходимое угловое положение.
Поскольку необходимое угловое положение было выбрано, средство 30 управления выполняется с возможностью приведения в действие устройства 10 для стрижки в режиме резания. Датчик 40 углового положения, функционирующий в качестве средства распознавания углового положения, применяется для генерирования информации, указывающей на угловое положение режущего блока 12 относительно горизонтали. Средство 30 управления выполняется с возможностью определения любого отклонения режущего блока 12 от необходимого углового положения в зависимости от сгенерированной информации, указывающей на угловое положение режущего блока 12. Средство управления приводит в действие исполнительное средство 15 для регулирования взаимного расположения режущего блока 12 и ручки 11 на основании информации, указывающей на угловое положение, обеспеченной посредством датчика 40 углового положения и эталонного профиля. Средство 30 управления выполняется с возможностью сравнения информации, указывающей на угловое положение режущего блока 12, с эталонным профилем, обеспечивающим информацию, указывающую на необходимое угловое положение. Средство 30 управления определяет, соответствует ли информация, указывающая на угловое положение режущего блока 12, необходимому угловому положению. Средство 30 управления выполняется с возможностью обращения к эталонному профилю, хранящему данные, указывающие на необходимое угловое положение. В случае, если средство 30 управления определяет, что информация, указывающая на угловое положение режущего блока 12, не соответствует хранящемуся необходимому угловому положению, средство управления выполняется с возможностью определения разницы между двумя углами и приведения в действие исполнительного средства 15 с целью перемещения режущего блока 12 в правильное положение. Степень перемещения обрабатывающего блока 12 относительно ручки 11 определяется посредством средства 30 управления на основании информации, указывающей на угловое положение обрабатывающего блока 12, обеспеченной посредством датчика 40 углового положение и информации, указывающей на вращение обрабатывающего блока 12 относительно ручки 11. Информация, указывающая на вращение обрабатывающего блока 12 относительно ручки 11, может обеспечиваться посредством исполнительного средства 15 или другого элемента, функционирующего в качестве средства распознавания обнаружения вращения.
В одном варианте осуществления, в тех случаях, когда средство 30 управления определяет, что при приведении в действие устройства 10 необходимое угловое положение достигнуто, средство 30 управления выполняется с возможностью приведения в действие модуля 60 обратной связи, например, посредством приведения в действие динамика для генерирования звука, с целью обеспечения пользователю обратной связи. Также, или в качестве альтернативы, средство 30 управления может изменять рабочие параметры приводного средства 14 блока управления, например, посредством приведения в действие приводного средства 14 в случае, если определяется, что необходимое угловое положение достигнуто.
В таком случае пользователь передвигает устройство 10 для стрижки с целью подстригания волос на части тела, подлежащей обработке. В связи с тем, что положение ручки 11 изменяется, средство 30 управления выполняется с возможностью изменения одного или более рабочих параметров устройства 10, в данном варианте осуществления взаимного расположения режущего блока 12 и ручки 11 в зависимости от определенного углового положения режущего блока 12. Другими словами, средство 30 управления выполняется с возможностью приведения в действие исполнительного средства 15 в случае, когда средство 30 управления определяет, что существует разница между информацией, указывающей на положение режущего блока 12, и необходимым угловым положением, обеспеченным посредством эталонного профиля.
Средство 30 управления выполняется с возможностью сравнения информации, указывающей на угловое положение режущего блока 12, с эталонным профилем, обеспечивающим информацию, указывающую на необходимое угловое положение. Средство 30 управления определяет, соответствует ли информация, указывающая на угловое положение режущего блока, необходимому угловому положению. Средство 30 управления выполняется с возможностью обращения к эталонному профилю, хранящему данные, указывающие на необходимое угловое положение. Если средство 30 управления определяет, что информация, указывающая на угловое положение режущего блока 12, не соответствует сохраненному необходимому угловому положению, тогда средство 30 управления выполняется с возможностью определения разницы между информацией, указывающей на необходимое угловое положение, и обнаруженным угловым положением и соответственно приведения в действие исполнительного средства 15. Степень перемещения обрабатывающего блока 12 относительно ручки 11 определяется посредством средства 30 управления на основании информации, указывающей на угловое положение обрабатывающего блока 12, обеспеченной посредством датчика 40 углового положения, и информации, указывающей на вращение обрабатывающего блока 12 относительно ручки 11.
Если средство 30 управления определяет, что информация, указывающая на угловое положение режущего блока 12, соответствует необходимому угловому положению, тогда средство 30 управления не приводит в действие исполнительное средство 15. Средство 30 управления может быть выполнено с возможностью обращения к информации, указывающей на угловое положение режущего блока 12 на постоянной основе или с предварительно заданными интервалами времени. Средство 30 управления может быть выполнено с возможностью определения углового положения режущего блока 12 относительно горизонтали посредством контроля за информацией, сгенерированной посредством датчика 40 углового положения, и посредством определения любого изменения в угловом положении режущего блока 12 относительно части тела, подлежащей обработке, на основании определенного изменения в положении устройства 10 для стрижки относительно части тела, подлежащей обработке, в течение заданного промежутка времени.
Фиг.4 и 5 изображают пример устройства 10, используемого при необходимом угловом положении, составляющем 0 градусов по отношению к горизонтали. На фиг.4 устройство изображается в первом рабочем режиме, при этом на фиг.5 устройство изображается во втором рабочем режиме, в котором положение ручки 11 изменилось, тем не менее средство управления скорректировало изменение посредством приведения в действие исполнительного средства 15 с целью поддержания углового положения режущего блока.
Датчик 40 углового положения способен генерировать информацию, указывающую на угловое положение режущего блока 12 на постоянной основе или на основании заранее заданных интервалов. Средство 30 управления способно обращаться к информации, указывающей на угловое положение режущего блока 12 на постоянной основе или на основании заранее заданных интервалов. Следовательно, датчик 40 углового положения способен обеспечивать информацию, указывающую на угловое положение режущего блока 12. Средство 30 управления выполняется с возможностью определения отклонения от необходимого углового положения на основании сравнения относительных положений устройства 10 для стрижки в течение заданного периода времени. Следовательно, средство 30 управления способно определять траекторию устройства 10 стрижки относительно части тела, подлежащей обработке, на основании информации, сгенерированной посредством датчика 40 углового положения.
Следует понимать, что в процессе использования обрабатывающий блок 12 может вращаться в направлении по часовой стрелке и против часовой стрелки. Следует понимать, что в процессе использования исполнительное средство 15 будет перемещать обрабатывающий блок 12 в различных направлениях в зависимости от перемещения ручки 11. Однако, как правило, в процессе использования обрабатывающий блок 12 будет отклоняться в одном направлении вращения, либо по часовой стрелке, либо против часовой стрелки, относительно нейтральной позиции режущей головки 12 в зависимости от того, в какой руке держат устройство. Однако в процессе использования может возникнуть необходимость поменять руки, например, чтобы подстричь волосы на другой стороне головы пользователя. В одном варианте осуществления средство 30 управления выполняется с возможностью изменения направления вращения режущего блока 12 относительно ручки 11 на противоположное таким образом, чтобы можно было сформировать соответствующую стрижку на противоположной стороне головы пользователя. Средство 30 управления может быть выполнено с возможностью изменения направления вращения режущего блока 12 в ответ на приведение в действие пользовательского ввода 50 или на основании информации, сгенерированной посредством датчика 40 углового положения. Эталонный профиль, хранящийся посредством памяти 32, может быть выполнен с возможностью хранения информации, указывающей на перемену направления режущего блока 12 на обратное, при этом средство 30 управления может быть выполнено с возможностью обращения к эталонному профилю.
Фиг.6 и 7 изображают пример устройства 10, используемого для подравнивания бакенбардов на боковой части головы пользователя. В данном варианте осуществления необходимое угловое положение составляет около 85 градусов по отношению к горизонтали. На фиг.4 изображается устройство в первом рабочем режиме, при этом на фиг.5 изображается устройство во втором рабочем режиме, в котором положение ручки 11 изменилось, тем не менее средство управления скорректировало изменение посредством приведения в действие исполнительного средства 15 с целью поддержания углового положения режущего блока 12. Пользователь приводит в действие пользовательский ввод 50 для индикации изменения режима стрижки, при этом средство 30 управления выполняется с возможностью изменения направления вращения режущего блока 12 относительно ручки 11 на обратное.
Несмотря на то что в описанных выше вариантах осуществления рабочий параметр, с возможностью регулирования которого выполнено средство 30 управления, представляет собой приведение в действие исполнительного средства 15, следует понимать, что предусматриваются альтернативные схемы размещения. Далее будет описан альтернативный, или дополняющий, вариант осуществления со ссылкой на фиг.8. Схема размещения данного варианта осуществления устройства для стрижки в целом является аналогичным вариантам осуществления, описанным выше, и таким образом, в данном документе подробное описание будет опущено. Более того, ссылочные позиции будут сохранены. Однако в данном варианте осуществления средство 30 управления сообщает пользователю устройством для стрижки о состоянии углового положения посредством модуля 60 обратной связи, например, динамика и/или дисплея, в зависимости от информации, сгенерированной посредством датчика 40 углового положения. В таком варианте осуществления при использовании устройства для стрижки, средство 30 управления выполняется с возможностью изменения рабочего параметра модуля 60 обратной связи с целью информирования пользователя в зависимости от информации, сгенерированной посредством датчика 40 углового положения, функционирующего в качестве средства распознавания углового положения, таким образом, чтобы пользователь мог предпринять соответствующее действие.
На фиг.8 режущий блок 12, входящий в состав устройства 10 для стрижки, размещен неподвижно относительно ручки 11. Следовательно, положение режущего блока 12 зависит от положения ручки 11. В данном варианте осуществления датчик 40 углового положения находится в режущем блоке 12, однако следует понимать, что датчик 40 углового положения может находиться в ручке 11, поскольку положение ручки 11 соответствует положению режущего блока 12.
Функционирование устройства 10 для стрижки в целом аналогично описанным выше вариантам осуществления. Другими словами, средство управления выполняется с возможностью изменения рабочего параметра устройства 10 для информирования пользователя в зависимости от информации, сгенерированной посредством датчика 40 углового положения, и эталонного профиля, хранящегося в памяти. Необходимое угловое положение может быть получено как описано выше, и, таким образом, в данном документе подробное описание будет опущено.
В период эксплуатации режущего устройства 10 может быть приведен в действие модуль 60 обратной связи с целью обеспечения акустического сигнала в форме слышимого звука, такого как, например, звук в форме коротких тональных посылок. В качестве альтернативы или в дополнение, модуль 60 обратной связи может обеспечивать тактильную обратную связь в форме вибраций, которые ощущаются пользователем через ручку, входящую в состав устройства. В качестве альтернативы или в дополнение, модуль 60 обратной связи может обеспечивать оптический сигнал, такой как, например, мигающий сигнал или другой оптический индикатор. Следует понимать, что средство 30 управления может быть выполнено с возможностью приведения в действие модуля 60 обратной связи для обеспечения более, чем одного из упомянутых выше сигналов в зависимости от информации, сгенерированной посредством датчика 40 углового положения.
В одном варианте осуществления средство 30 управления выполняется с возможностью приведения в действие модуля 60 обратной связи с целью обеспечения указания пользователю, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение режущего блока 12 отличается от необходимого углового положения. Следовательно, пользователь обеспечивается указанием, что обрабатывающая кромка 13 не находится в необходимом угловом положении. В одном варианте осуществления средство 30 управления выполняется с возможностью обеспечения указания пользователю на направление, в котором следует перемещать режущий блок 12, чтобы восстановить или получить необходимое угловое положение. Например, средство 30 управления может приводить в действие динамик с целью издания различных тональных сигналов в зависимости от направления, в котором режущий блок отклоняется относительно необходимого углового положения, на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля. Средство 30 управления может также быть выполнено с возможностью приведения в действие динамика для изменения силы звука в зависимости от степени, до которой режущий блок 12 отклоняется относительно необходимого углового положения на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля.
В дополнительном альтернативном или дополняющем варианте осуществления средство 30 управления выполняется с возможностью приведения в действие модуля 60 обратной связи для обеспечения указания пользователю, когда на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение режущего блока 12 соответствует необходимому угловому положению. Следовательно, пользователь обеспечивается указанием, что обрабатывающая кромка 13 располагается в необходимом угловом положении по отношению к горизонтали. Например, средство 30 управления может приводить в действие динамик, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, определяется, что режущий блок 12 расположен правильно.
В дополнительном альтернативном или дополняющем варианте осуществления средство 30 управления выполняется с возможностью регулирования работы приводного средства 14 режущего блока в зависимости от определения средством 30 управления, что угловое положение режущего блока 12 отличается от необходимого углового положения, на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля. В таком варианте осуществления средство 30 управления выполняется с возможностью приведения в действие приводного средства 14 режущего блока, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение режущего блока 12 соответствует необходимому угловому положению. Средство 30 управления выполняется с возможностью прекращения работы приводного средства 14 режущего блока в том случае, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение режущего блока 12 отличается от необходимого углового положения. Следовательно, предотвращается выполнение стрижки пользователем при угловом положении, которое отличается от необходимого углового положения.
Следует понимать, что вышеупомянутые варианты осуществления, относящиеся к рабочему параметру, с возможностью регулирования которого выполняется средство 30 управления, представляющему собой применение модуля 60 обратной связи или приведение в действие приводного средства 14 обрабатывающей головки, могут использоваться в комбинации друг с другом и/или в комбинации с вариантами осуществления, в которых средство 30 управления выполняется с возможностью регулирования взаимного положения режущего блока 12 и ручки 11. Например, в одном варианте осуществления средство 30 управления может быть выполнено с возможностью приведения в действие исполнительного средства 15 для поддержания углового положения обрабатывающего блока 12 по отношению к горизонтали. В таком варианте осуществления средство 30 управления также может быть выполнено с возможностью приведения в действие одного или более модулей 60 обратной связи с целью обеспечения указания пользователю в случае, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение обрабатывающего блока 12 отличается от необходимого углового положения. Такое событие может произойти в случае резкого перемещения устройства 10 для стрижки или в случае, если положение ручки 11 смещается от горизонтали за пределы перемещения исполнительного средства 15. В такой схеме размещения средство 30 управления может выполняться с возможностью прекращения работы одного или более модулей 60 обратной связи, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение режущего блока 12 соответствует необходимому угловому положению.
В качестве альтернативы или наряду со средством 30 управления, приводящим в действие модуль 60 обратной связи, средство 30 управления может выполняться с возможностью изменения рабочего режима приводного средства 14 режущего блока с целью прекращения режущего действия устройства 10 для стрижки в том случае, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство 30 управления определяет, что угловое положение режущего блока 12 отличается от необходимого углового положения. В такой схеме размещения средство 30 управления может быть выполнено с возможностью приведения в действие приводного средства 14 режущей головки, если на основании информации, обеспеченной посредством датчика 40 углового положения и эталонного профиля, средство управления определяет, что угловое положение режущего блока 12 соответствует необходимому угловому положению.
В описанных выше вариантах осуществления средство распознавания углового положения представляет собой датчик 40 углового положения. Однако в других вариантах осуществления угловое положение определяется посредством альтернативного средства или, как будет далее описано со ссылкой на фиг.9 и 11, посредством комбинации альтернативного средства и датчика 40 углового положения. Варианты осуществления, описанные ниже, в основном аналогичны вариантам осуществления, описанным выше, и, таким образом, в данном документе их подробное описание будет опущено. Однако в вариантах осуществления, описанных ниже со ссылкой на фиг.9 и 11, устройство 10 для стрижки имеет в составе датчик 70 обнаружения индикатора, функционирующий в качестве средства распознавания углового положения. Средство распознавания углового положения может содержать как датчик 40 углового положения, так и датчик 70 обнаружения индикатора, или в вариантах осуществления один из них может быть опущен.
Как изображено на фиг.9 и 11, в настоящем варианте осуществления датчик 40 углового положения и датчик 70 обнаружения индикатора вместе формируют средство распознавания углового положения. Датчик 70 обнаружения индикатора выполняется с возможностью обнаружения индикатора, примененного к части тела, подлежащей обработке. В настоящем варианте осуществления датчик 70 обнаружения индикатора выполняется с возможностью обнаружения оптической метки на коже и/или волосах пользователя. Оптическая метка, функционирующая в качестве индикатора, генерируется посредством генератора 90 индикатора. Оптическая метка, функционирующая в качестве индикатора, является признаком необходимого углового положения. Оптическая метка может представлять собой линейный или фигурный признак необходимого углового положения. Генератор 90 индикатора находится на основном блоке 80 системы для стрижки волос. В данном варианте осуществления система для стрижки волос содержит основной блок 80 и устройство 10 для стрижки. Генератор 90 индикатора представляет собой генератор лазерного луча. Генератор 90 индикатора отображает визуальную линию на части тела, подлежащей обработке. Это предоставляет пользователю возможность без труда определить угловое положение, которое он желает. Эти метки служат в качестве индикатора, который датчик 70 обнаружения индикатора, входящий в состав устройства, сможет обнаружить, что предоставит возможность средству управления изменять рабочий параметр устройства соответственно. Датчик 70 обнаружения индикатора представляет собой оптический датчик, тем не менее предусматриваются и альтернативные датчики.
В другом варианте осуществления датчик 70 обнаружения индикатора выполняется с возможностью обнаружения вещества (не изображено), действующего в качестве индикатора, на коже пользователя, которое было обеспечено пользователем. Вещество может быть нанесено посредством приспособления для нанесения вещества, такого как, например, ручка. Вещество, нанесенное на кожу и/или волосы, может представлять собой ультрафиолетовые чернила, при этом датчик может представлять собой датчик ультрафиолетового излучения. В некоторых вариантах осуществления вещество может представлять собой флуоресцирующее вещество, которое обнаруживается как посредством датчика ультрафиолетового излучения, так и является визуально заметным пользователю в условиях нормального освещения. Однако следует понимать, что в качестве альтернативы на волосы и/или кожу могут наноситься другие вещества, при этом обеспечиваются надлежащие датчики, предназначенные для обнаружения присутствия этого вещества на волосах и/или коже пользователя. Например, вещество может представлять собой любое вещество, имеющее возможность оптического обнаружения в пределах видимого участка спектра или вне их. Примеры других веществ, имеющих возможность оптического обнаружения, которые могут наноситься на волосы и/или кожу, включают в себя графитовое вещество или косметику, или любое другое легко наносимое и визуально заметное или визуально незаметное вещество.
Как только индикатор, в данном варианте осуществления это оптическая метка, нанесен на кожу, являясь признаком необходимого углового положения стрижки, пользователь приводит в действие устройство 10 для стрижки. Датчик 70 обнаружения индикатора выполняется с возможностью генерирования информации, указывающей на необходимое угловое положение в зависимости от индикатора. В настоящем варианте осуществления датчик 70 обнаружения индикатора выполняется с возможностью обнаружения расположения оптической метки, сгенерированной посредством генератора 90 индикатора.
Средство 30 управления выполняется с возможностью формирования эталонного профиля, указывающего на необходимое угловое положение, на основании информации, сгенерированной посредством датчика 70 обнаружения индикатора. В настоящем варианте осуществления средство 30 управления приводит в действие исполнительное средство 15 с целью вращения режущего блока 12 относительно ручки 11, чтобы расположить режущую кромку 13 на одной линии с расположением оптической метки, сгенерированной посредством генератора 90 индикатора. Затем с целью формирования эталонного профиля средство управления обращается к информации, сгенерированной посредством датчика 40 углового положения. В качестве альтернативы, средство 30 управления выполняется с возможностью определения необходимого углового положения на основании информации, указывающей на необходимое угловое положение, сгенерированной посредством датчика 70 обнаружения индикатора, а также углового положения режущего блока 12 посредством определения взаимных угловых положений оптической метки и режущей головки. Следовательно, необходимое угловое положение определяется на основании информации, сгенерированной посредством датчика 70 обнаружения индикатора и датчика 40 углового положения.
В другом варианте осуществления средство 30 управления выполняется с возможностью приведения в действие модуля 60 обратной связи, например, дисплея или динамика, с целью указания пользователю на необходимость перемещения устройства 10 для стрижки до тех пор, пока режущая кромка 13 не окажется расположенной на одной линии с расположением оптической метки, на основании информации, сгенерированной посредством датчика 70 обнаружения индикатора. В таком случае для определения необходимого углового положения средство 30 управления обращается к информации, сгенерированной посредством датчика 40 углового положения.
Средство 30 управления формирует или изменяет эталонный профиль, указывающий на определенное необходимое угловое положение. Эталонный профиль может быть в форме таблицы поиска или другой записывающей конфигурации. В таком случае эталонный профиль сохраняется в памяти 32 посредством средства 30 управления для последующего обращения к нему посредством средства 30 управления.
В таком случае устройство 10 для стрижки приводится в действие в режиме резания, как описано выше, в зависимости от необходимого углового положения, определенного посредством средства 30 управления на основании информации, сгенерированной посредством датчика 70 обнаружения индикатора или совместно посредством датчика 70 обнаружения индикатора и датчика 40 углового положения. В настоящем варианте осуществления средство 30 управления выполняется с возможностью приведения в действие исполнительного средства 15 с целью регулирования взаимного положения режущего блока 12 и ручки 11 с целью обеспечения удерживания режущей кромки 13 в необходимом угловом положении. Однако, в качестве альтернативы, или в том числе, средство 30 управления может информировать пользователя устройством 10 посредством модуля 60 обратной связи.
Следует понимать, что в одном варианте осуществления датчик 40 углового положения может быть опущен, и что необходимое угловое положение определяется только посредством средства 30 управления на основании информации, сгенерированной посредством датчика 70 обнаружения индикатора. В таком варианте осуществления средство 30 управления выполняется с возможностью обращения к информации, указывающей на положение индикатора, сгенерированной посредством датчика 70 обнаружения индикатора, в течение операции резания с целью определения относительного положения режущего блока 12 относительно необходимого углового положения, определенного посредством индикатора. В таком случае средство 30 управления приводит в действие исполнительное средство 15 и/или модуль 60 обратной связи в зависимости от информации, сгенерированной посредством датчика 70 обнаружения индикатора, с целью обеспечения необходимого углового положения режущего блока 12.
Несмотря на то что в описанных выше вариантах осуществления средство управления, выполненное с возможностью формирования информации, указывающей на угловое положение обрабатывающего блока, на основании информации, обеспеченной посредством средства распознавания углового положения, находится в устройстве для стрижки, следует понимать, что в альтернативных схемах размещения средство управления может представлять собой отдельное средство управления, например, средство управления, находящееся в мобильном устройстве, таком как, например, мобильный телефон, функционирующем в качестве основного блока. В такой схеме размещения это средство управления будет выполнено с возможностью обеспечения информации, сгенерированной посредством средства распознавания углового положения. Информация, указывающая на угловое положение обрабатывающего блока на основании информации, сформированной посредством этого отдельного средства управления, может затем передаваться на обрабатывающее устройство. Аналогично, один или более модулей обратной связи и/или пользовательских вводов могут размещаться на основном блоке.
Следует понимать, что термин «содержащий» не исключает других элементов или этапов, и упоминание элемента в единственном числе не исключает наличие множества. Лишь тот факт, что определенные меры перечислены в разных взаимозависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть выгодно использована. Никакие ссылочные позиции в формуле изобретения не следует расценивать как ограничивающие объем формулы изобретения.
Несмотря на то что формула изобретения составлена в этой заявке с конкретными комбинациями признаков, следует понимать, что объем раскрытия сущности настоящего изобретения также включает в себя любые новые признаки и новые комбинации признаков, раскрытые в данном документе либо явно, либо неявно, либо как обобщение из вышеперечисленных, относится ли это или нет к тому же изобретению, как настоящим заявляется в любом пункте формулы изобретения, а также уменьшает это или нет какую-либо или все технические проблемы, как это происходит в исходном изобретении. Настоящим заявители предупреждают, что новая формула изобретения может быть составлена по таким признакам и/или комбинациям признаков во время выполнения настоящей заявки или любой дополнительной заявки, являющейся производной этой заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ЧАСТИ ТЕЛА ЧЕЛОВЕКА | 2015 |
|
RU2752387C2 |
| РЕГУЛИРУЕМЫЙ ПРОРЕЖИВАЮЩИЙ ГРЕБЕНЬ, ПРИВОД РЕГУЛИРОВКИ И ПРИБОР СТРИЖКИ ВОЛОС | 2015 |
|
RU2676370C2 |
| УСТРОЙСТВО ДЛЯ СТРИЖКИ ВОЛОС С РАСПОЗНАВАНИЕМ БЛОКА ГРЕБЕНКИ | 2010 |
|
RU2549822C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБРАБОТКИ ЧАСТИ ТЕЛА | 2014 |
|
RU2683170C2 |
| ГЕНЕРИРОВАНИЕ ИНДИКАТОРА НАВЕДЕНИЯ И СИГНАЛА ИНДИКАТОРА | 2017 |
|
RU2731206C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЯМИ ПОЛЬЗОВАТЕЛЯ ВО ВРЕМЯ ПРОЦЕДУРЫ БРИТЬЯ | 2014 |
|
RU2665443C2 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ АВТОМАТИЗИРОВАННЫХ ПРОЦЕДУР ОБРАБОТКИ ВОЛОС | 2018 |
|
RU2749100C2 |
| УШНОЙ ВКЛАДЫШ, УКАЗАТЕЛЬ ПОЛОЖЕНИЯ И СИСТЕМА ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2733047C1 |
| РЕГУЛИРУЕМЫЙ РАЗДЕЛИТЕЛЬНЫЙ ГРЕБЕНЬ, РЕГУЛИРОВОЧНЫЙ ПРИВОД И УСТРОЙСТВО ДЛЯ СТРИЖКИ ВОЛОС | 2015 |
|
RU2689002C2 |
| СЛЕЖЕНИЕ ЗА ПОЛОЖЕНИЕМ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2745622C2 |
Изобретение относится к области устройств для стрижки. Устройство для стрижки волос содержит режущий блок, средство распознавания углового положения, средство управления и пользовательский ввод. Средство распознавания углового перемещения содержит датчик положения и генерирует информацию, указывающую на угловое положение режущего блока относительно горизонтали. Средство управления выполняют с возможностью обращения к эталонному профилю, указывающему на необходимое угловое положение режущего блока, и регулировки расположения режущего блока в ответ на информацию, обеспеченную посредством средства распознавания углового положения. Средство управления может изменять и/или формировать эталонный профиль на основании пользовательского ввода. Изобретение включает также систему для стрижки волос, способ стрижки волос и энергонезависимую память. 4 н. и 9 з.п. ф-лы, 11 ил.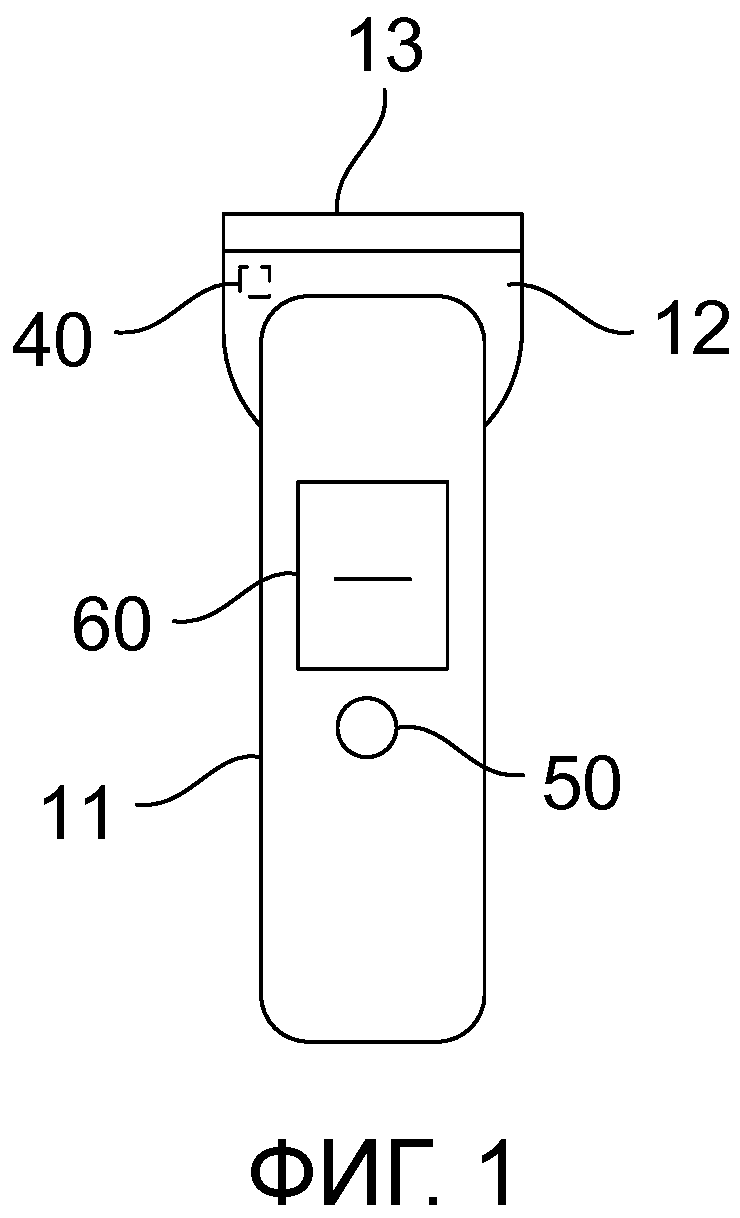
1. Устройство (10) для стрижки волос, содержащее:
режущий блок (12),
средство (40, 70) распознавания углового положения, выполненное с возможностью генерирования информации, указывающей на угловое положение режущего блока, причем упомянутое средство (40, 70) распознавания углового положения содержит датчик углового положения, выполненный с возможностью генерирования информации, указывающей на угловое положение режущего блока (12) относительно горизонтали,
средство (30) управления, выполненное с возможностью обращения к эталонному профилю, указывающему на необходимое угловое положение режущего блока (12), генерирования информации, указывающей на угловое положение режущего блока относительно необходимого углового положения на основании информации, сгенерированной посредством средства (40, 70) распознавания углового положения и эталонного профиля, при этом средство (30) управления дополнительно выполнено с возможностью регулирования расположения режущего блока (12) в ответ на информацию, указывающую на угловое положение режущего блока, обеспеченную посредством средства распознавания углового положения, и
пользовательский ввод (50), при этом средство (30) управления выполнено с возможностью изменения и/или формирования эталонного профиля на основании пользовательского ввода с использованием формы пользовательского интерфейса.
2. Устройство (10) по п.1, в котором средство (30) управления выполнено с возможностью регулирования углового положения режущего блока в случае, если средство (30) управления определяет, что информация, сгенерированная посредством средства (40, 70) распознавания углового положения, соответствует эталонному профилю.
3. Устройство (10) по п.1 или 2, в котором средство управления выполнено с возможностью регулирования углового положения режущего блока в случае, если средство (30) управления определяет, что информация, сгенерированная посредством средства (40, 70) распознавания углового положения, отличается от эталонного профиля.
4. Устройство (10) по любому из пп. 1-3, в котором средство (30) управления выполнено с возможностью обращения к информации, указывающей на угловое положение режущего блока (12), сгенерированной посредством средства (40, 70) распознавания углового положения, и изменения и/или сохранения эталонного профиля на основании информации, указывающей на угловое положение режущего профиля.
5. Устройство (10) по любому из пп. 1-4, в котором средство (40, 70) распознавания углового положения содержит датчик обнаружения индикатора, выполненный с возможностью обнаружения индикатора, определяющего угловое положение обрабатывающего блока относительно части тела, подлежащей обработке.
6. Устройство (10) по п.5, в котором индикатор представляет собой вещество, нанесенное на часть тела, или проецируемую метку, спроецированную на часть тела.
7. Устройство (10) по любому из пп. 1-6, дополнительно содержащее модуль (60) обратной связи, обеспечивающий обратную связь пользователю в ответ на информацию, указывающую на угловое положение режущего блока (12).
8. Устройство (10) по п.7, в котором модуль (60) обратной связи выполнен с возможностью обеспечения визуальной, звуковой и/или тактильной обратной связи.
9. Устройство (10) по любому из пп. 1-8, дополнительно содержащее ручку (11) и исполнительное средство (15), причем исполнительное средство выполнено с возможностью перемещения режущего блока (12) относительно ручки путем приведения в действие исполнительного средства для перемещения режущего блока относительно ручки.
10. Устройство (10) по любому из пп. 1-9, которое представляет собой устройство для обработки волос, при этом режущий блок (12) представляет собой блок для обработки волос.
11. Система для стрижки волос, содержащая:
устройство (10) для стрижки волос, имеющее в составе режущий блок (12),
мобильный телефон или планшетный компьютер, содержащий средство управления, средство ввода пользовательских данных и приема обратной связи от пользователя, средство (40, 70) распознавания углового положения, выполненное с возможностью генерирования информации, указывающей на угловое положение режущего блока, причем упомянутое средство (40, 70) распознавания углового положения содержит датчик углового положения, выполненный с возможностью генерирования информации, указывающей на угловое положение режущего блока (12) относительно горизонтали, и
средство (30) управления, выполненное с возможностью регулирования одного или более параметров системы в ответ на информацию, указывающую на угловое положение режущего блока, обеспеченную посредством средства распознавания углового положения.
12. Способ стрижки волос, в котором
генерируют информацию, указывающую на угловое положение блока (12) для обработки волос, входящего в состав устройства (10) для стрижки волос, с использованием средства (40, 70) распознавания углового положения, причем упомянутое средство (40, 70) распознавания углового положения содержит датчик углового положения, выполненный с возможностью генерирования информации, указывающей на угловое положение режущего блока (12) относительно горизонтали, и
регулируют расположение режущего блока (12) в ответ на информацию, указывающую на угловое положение режущего блока, обеспеченную посредством средства распознавания углового положения.
13. Энергонезависимая память, содержащая команды, которые при выполнении процессором обеспечивают выполнение стрижки волос способом по п.12.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| БЕЗОПАСНАЯ БРИТВА | 2008 |
|
RU2417880C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 4602542 A, 29.07.1986. | |||

