Универсальная модульно-блочная система мониторинга состояния ледяного покрова относится к ледоведению и ледотехнике и служит для прогноза времени и места образования трещин, разломов, торошений в условиях сжатия дрейфующих ледяных полей, разрушения льда при воздействии волн зыби, а также отрыва припая (припай условно-неподвижный ледяной покров, связанный с берегом) при ветровом воздействии. Такая система может быть использована для обеспечения безопасности нахождения на льду: людей, материальных ценностей, дрейфующих станций, ледовых аэродромов, ледовых переправ, и, кроме того, при эксплуатации нефтедобывающих платформ в ледовых условиях и разгрузки судов на ледяной покров.
Известны, способы наблюдений за состоянием ледяного поля при помощи сейсмометров и наклономеров /1/. На дрейфующем ледяном покрове расставлялись в одной точке или три сейсмометра (вертикальный и два горизонтальных) или два наклономера. Регистрация аналоговых сигналов проводилась на многоканальный самописец, а передача информации от датчиков на регистратор осуществлялась по проводам.
Недостатком таких расстановок является неполнота, получаемых данных о волновых процессах, вызванных трещинообразованием и торошениями в окружающем ледяном покрове, и отсутствие оперативной информации о пространственном положении расстановки и временной синхронизации датчиков, что не позволяет выделять предикторы формирования разлома ледяного поля в режиме реального времени. Передача аналогового сигнала по проводам от датчиков к регистратору является ненадежной в условиях дрейфующего льда и слабо помехозащищенной, требует больших физических усилий и времени в ее развертывании. Регистрация сигналов в аналоговом формате на самописец не позволяет проводить оперативную обработку данных для оценки текущего состояния ледяного поля в режиме реального времени для обеспечения прогноза его разлома.
Известна система регистрации времени и координат места образования айсбергов выводных ледников, которая осуществляется в результате расстановки на берегу в районе выводных ледников трех сейсмометрических станций. При этом каждая станция состоит из трех сейсмометров вертикального и двух горизонтальных, ориентированных по странам света. Станции расставляются на берегу по треугольной схеме, что позволяет определить координаты места формирования айсберга по вступлению упругих волн, образующихся при отрыве айсберга от ледника и распространяющихся по грунту с известной скоростью /2/. При этом координаты ледников заранее известны, а координаты расстановки однозначно привязаны к местности.
Недостатком такой системы является невозможность ее применения на дрейфующем ледяном покрове с целью мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома. Таким способом можно зарегистрировать образование трещин и зон торошения, но нельзя определить их координаты и прослеживать движение областей разрушения в ледяном покрове. Кроме того, частотная характеристика сейсмометров является узкополосной для регистрации всего возможного спектра колебаний, существующих в ледяном покрове. Расстановка сейсмометров по треугольной схеме позволяет определить направление и расстояние до очага разрушения по известным скоростям распространения только упругих волн. Для дрейфующего ледяного покрова при трехточечной схеме расстановки приборов и равновероятном образовании трещины в любом месте может возникнуть ситуация, когда полезный сигнал придет к двум приборам одновременно. В этом случае вторая координата очага полезного сигнала будет являться функцией скорости распространения волны и возникнет неопределенность по определению координат очага торошения или трещинообразования.
Известен, взятый за прототип, способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби /3/, который заключается в непрерывном фиксировании напряженно-деформированного состояния ледяного полигона и одновременно поля упругих волн в нем, а также положение ледяного полигона в пространстве и во времени. Это достигается включением полевых станций и расстановки их по четырехугольной схеме, каждая из которых состоит из трехкомпонентного сейсмометра, двухкомпонентного наклономера, двух деформометров, двух датчиков напряжений, ориентированных по странам света и приемника глобальной спутниковой системы позиционирования. Кроме того, данные с полевых станций по радиоканалу поступают на базовую станцию сбора и обработки данных в режиме реального времени и записываются в базу данных на устройство постоянной памяти (сервер). Одновременно с записью на сервер осуществляется обработка на компьютере с выводом данных на дисплей, что позволяет оператору выделить предикторы разрушения ледяного поля и дать заблаговременный прогноз опасного явления в определенном временном диапазоне. Временная синхронизация между полевыми станциями, а также фиксация изменений ориентации расстановки датчиков при дрейфе и поворотах ледяного поля осуществляется посредством приема сигнала глобальной спутниковой системы позиционирования на приемник сигналов глобальной спутниковой системы позиционирования GPS или ГЛОНАСС.
Недостатком такого способа мониторинга состояния ледяного поля или припая и прогноза его разлома при сжатии и воздействии волн зыби является отсутствие визуальной информации у оператора о характере протекания процесса разрушения льда, что снижает качество прогноза по запасу времени у персонала для подготовки к событию. Кроме того, припай является условно неподвижным ледяным покровом, поэтому для регистрации напряженно-деформированного состояния ледяного полигона и одновременно поля упругих волн в нем достаточна расстановка из трех модульных полевых станций на припае, а вместо полного набора датчиков, входящих в четвертую полевую станцию, устанавливаемую на берегу, достаточно использовать только трехкомпонентный сейсмометр для регистрации упругих волн, вызываемых воздействием припая на береговой грунт (береговую черту). Уровень такого сигнала дополнительно характеризует связь припая с берегом.
Техническое решение заключается в расширении функциональных возможностей универсальной модульно-блочной системы мониторинга состояния ледяного покрова и повышение качества и точности прогноза отрыва припая и разлома дрейфующих ледяных полей.
Указанный технический результат достигается за счет включения в универсальную модульно-блочную систему мониторинга состояния ледяного покрова модуля, состоящего из беспилотного летательного аппарата вертолетного типа (БЛА), укомплектованного блоком, содержащим камеру фото и видео фиксации в видимом диапазоне, камеру фото и видео фиксации в инфракрасном диапазоне (ИК), датчик приема электро-магнитного излучения /4/ и блок приемо-передающей антенны. Работа в видимом диапазоне проводится в дневное время, а ИК диапазон обеспечивает визуальные наблюдения в ночное время и при плохой видимости днем. Датчик приема электро-магнитного излучения дополнительно к данным сейсмометров обеспечивает наблюдения за микротрещинообразованием непосредственно в точке визуальных наблюдений с помощью БЛА. При этом модуль базовой станции комплектуется устройством приема и записи на сервер сигналов поступающих с БЛА, которые записываются на сервер и одновременно поступают через компьютер на дополнительный монитор. Оператор визуально может наблюдать протекающие процессы разрушения льда и характер формирования системы трещин или характер торошения в конкретном месте ледяного поля. Таким образом, при помощи модульных полевых станций определяется развитие напряженно-деформированного состояния ледяного полигона и изменения в характере волновых полей, на основании чего выявляются предикторы разрушения льда, а видео наблюдения обеспечивают возможность характеризовать развитие процессов трещинообразования и торошения во льду необходимых для принятия решения об уровне опасности.
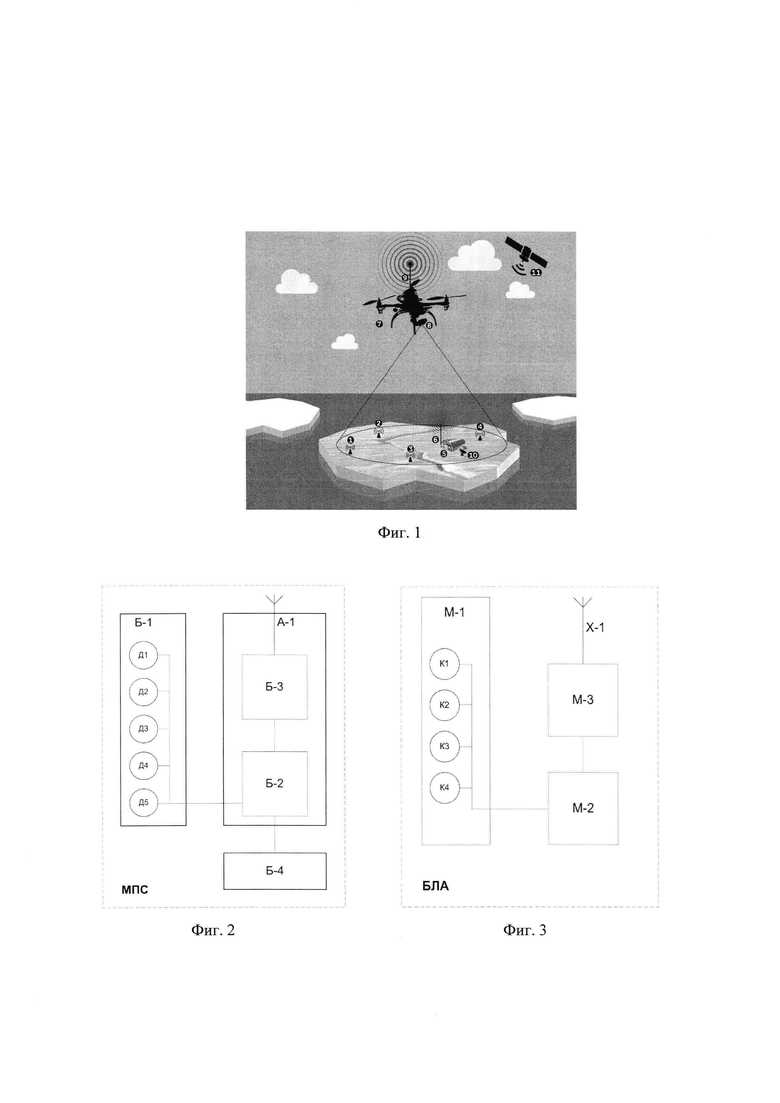
На фиг. 1 представлена универсальная модульно-блочная система мониторинга состояния ледяного покрова развернутая по четырехугольной схеме на дрейфующем ледяном поле. Система состоит из четырех модулей полевых станции 1, 2, 3, 4. Каждая полевая станция состоит из блока датчиков первичной фиксации напряженно-деформированного состояния ледяного полигона и поля упругих волн в нем (на фиг. 1 не указаны), который включает в себя два деформометра, два датчика напряжения, двухкомпонентный наклономер, трехкомпонентный сейсмометр, приемник глобальной спутниковой системы позиционирования; блок регистрации и преобразования сигналов в цифровой формат, поступающих с датчиков; блок управления и передачи данных по радиоканалу (РК) на модуль базовой станции 5 (МБС) и блок аккумуляторов питания станции. Модуль базовой станции 5 (МБС) служит для управления и сбора данных с полевых станций 1, 2, 3, 4 и беспилотного летательного аппарата вертолетного типа 7 (БЛА). Связь с полевыми станциями и БЛА осуществляется по радиоканалу при помощи приемо-передающего антенного блока 6 базовой станции. Блок с датчиками 8, установленный на БЛА, комплектуется камерой фото и видео фиксации в видимом диапазоне, камерой фото и видно фиксации в ИК диапазоне и датчиком приема электромагнитного излучения при трещинообразовании во льду (на фиг. 1 не указаны). Кроме того на БЛА устанавливается блок приемо-передающей антенны 9 для связи с базовой станцией 5 (МБС). По логистической необходимости модуль базовой станции 5 может быть развернут на ледяном поле, на берегу или судне. Поступающая на МБС 5 информация может передаваться с помощью спутниковой антенны 10 на ИС3-ретранслятор 11 и далее в удаленный центр накопления и обработки данных.
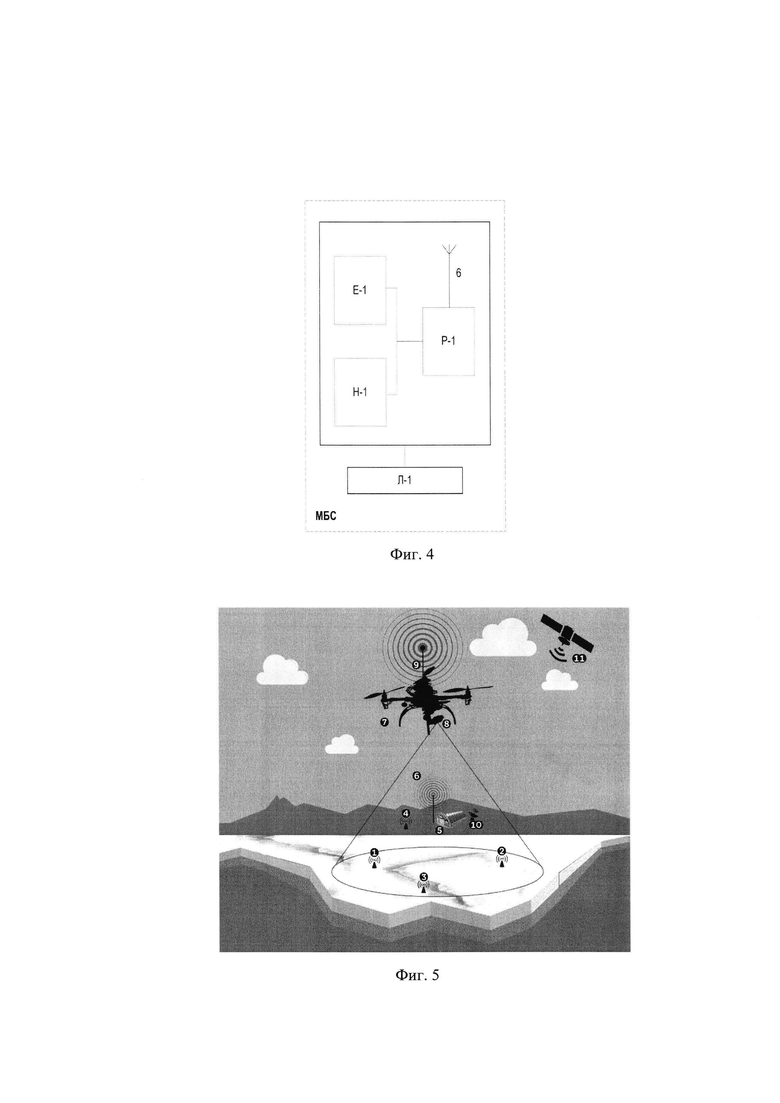
На фиг. 2 представлена блок-схема модуля полевой станции (МПС), которая имеет блочное конструктивное строение и состоит из блока Б-1 датчиков первичной фиксации напряженно-деформированного состояния ледяного полигона и поля упругих волн во льду: Д1 - два деформометра, Д2 - два датчика напряжений, Д3-двухкомпонентный наклономер, Д4 - трехкомпонетный сейсмометр, Д5 - приемник глобальной спутниковой системы позиционирования; блока Б-2 - регистрации и преобразования сигналов с датчиков в цифровой формат; блока Б-3 - передачи данных по радиоканалу при помощи приемо-передающей антенны А-1; блока аккумуляторов Б-4 электропитания полевой станции (МПС).
На фиг. 3 представлена блок-схема модуля беспилотного летательного аппарата вертолетного типа БЛА. Снаряжение БЛА имеет блочное строение и состоит из блока датчиков М-1, который имеет в своем составе датчики: К1 - фотодатчик с возможностью видеорегистрации в видимой области спектра, К2 - фотодатчик с возможностью видеорегистрации в инфракрасной области спектра, К3 - датчик приема электромагнитного излучения при трещинообразовании во льду, К4 - датчик приема сигналов глобальной спутниковой системы позиционирования GPS/GLONASS для временной синхронизации оцифровки и определения местоположения БЛА, М-2 - блок преобразования данных в цифровой формат и регистрации, М-3 - блок передачи полученных от датчиков оцифрованных данных по радиоканалу, Х-1 приемо-передающий антенный блок, при помощи которого осуществляется дистанционное управление БЛА, датчиками, регистратором, передача данных на базовую станцию 5 (МБС) (фиг. 1).
На фиг. 4 представлена блок-схема модуля базовой станции МБС предназначенной для управления и сбора данных с полевых станций (МПС) и беспилотного летательного аппарата вертолетного типа (БЛА), которая имеет блочное конструктивное строение и состоит из приемо-передающего блока Р-1 с приемо-передающим антенным блоком 6, блока постоянной памяти (сервер) сбора данных Е-1, аналитического рабочего блока дежурного оператора Н-1 и блока электропитания Л-1. Блок электропитания Л-1 позволяет подключаться к штатной судовой электросети, переносному бензоэлектрогенератору или блоку аккумуляторных батарей в зависимости от расположения модуля базовой станции на судне, ледяном покрове или берегу.
На фиг. 5 представлена универсальная модульно-блочная система мониторинга состояния ледяного покрова развернутая на припае и берегу. На припае устанавливаются три модуля полевых станций 1, 2 и 3 по треугольной схеме. На берегу располагается модуль полевой станции 4, в котором на регистрацию и передачу данных подключается только трехкомпонентный сейсмометр Д4 (фиг. 2) и один раз определяются координаты точки установки полевой станции 4 при помощи приемника глобальной спутниковой системы позиционирования Д5 (фиг. 2). Там же на берегу разворачивается модуль базовой станции 5 (МБС) с приемо-передающим антенным блоком 6 базовой станции, при помощи которого осуществляется связь с полевыми станциями 1, 2, 3, 4 и с беспилотным летательным аппаратом 7, укомплектованным блоком датчиков 8. В блок датчиков 8 входят: камера фото и видео фиксации в видимом диапазоне, камера фото и видно фиксации в ИК диапазоне и датчик приема электромагнитного излучения при трещинообразовании во льду (на фиг. 5 не указаны). Связь с базовой станцией (МБС) и управление БЛА осуществляется при помощи приемо-передающего антенного блока 9. В месте нахождения базовой станции устанавливается спутниковая антенна 10 для передачи информации на ИС3-ретранслятор 11 и далее в удаленный центр накопления и обработки данных.
Работа универсальной модульно-блочной системы мониторинга состояния ледяного покрова осуществляется следующим образом. На дрейфующей льдине по четырехугольной схеме в вершинах четырехугольника с размерами сторон, выбираемых в зависимости от размеров ледяного поля и решаемых задач, устанавливаются четыре полевые станции 1, 2, 3, 4 (фиг. 1). Для этого расчищаются четыре площадки от снега, на которых устанавливаются блоки датчиков Б-1 (фиг. 2) первичной фиксации напряженно-деформированного состояния ледяного полигона и поля упругих волн во льду, которые включают в себя два деформометра Д1 (фиг. 2), два датчика напряжения Д2 (фиг. 2), двухкомпонентный наклономер Д3 (фиг. 2), трехкомпонентный сейсмометр Д4 (фиг. 2). Все датчики ориентируются по странам света Север-Юг, Запад-Восток и подключаются к блокам регистрации и преобразования сигналов с датчиков в цифровой формат Б-2 (фиг. 2) модулей полевых станций (МПС). Кроме того, к полевым станциям подключаются приемники глобальной спутниковой системы позиционирования Д5 (фиг. 2) и блоки аккумуляторов Б-4 (фиг. 2) электропитания полевых станций (МПС). Передача данных с полевых станций осуществляется через блоки управления и передачи данных Б-3 (фиг. 2) при помощи антенн А-1 (фиг. 2). Связь с базовой станцией 5 МБС (фиг. 1) блоков Б-3(фиг. 2) передачи данных по радиоканалам осуществляется при помощи приемопередающих антенн А-1 (фиг. 2). Модуль базовой станции 5 (фиг. 1) разворачивается, в зависимости от решаемых задач, на дрейфующем ледяном поле, судне или берегу. Рабочая настройка и проверка полевых станций и беспилотного летательного аппарата первоначально осуществляется с помощью защищенного ноутбука, который на фиг. 1, 2, 3, 4 не указан. В дальнейшем контроль и управление полевыми станциями проводят с базовой станции.
Временная синхронизация между полевыми станциями и изменениями первоначальной ориентации расстановки датчиков при дрейфе и поворотах ледяного поля, а также контроль и управление беспилотным летательным аппаратом 7 (фиг. 1) осуществляется посредством постоянного приема сигнала глобальной спутниковой системы позиционирования на приемники сигналов глобальной спутниковой системы позиционирования Д5 (фиг. 2) и на встроенный приемник спутниковой системы позиционирования БЛА 7 (на фиг. 1 и 5 не указан).
Поступающая на модуль базовой станции МБС (фиг. 3) по радиоканалам в цифровом формате информация с полевых станций 1, 2, 3, 4 (фиг. 2) и БЛА (фиг. 4) записывается в базу данных на блок постоянной памяти Е-1 (сервер) (фиг. 3). Кроме того, поступающая информация обрабатывается на компьютере по определенному алгоритму в режиме реального времени в аналитическом блоке Н-1 дежурного оператора и выводится на рабочий и дополнительный дисплеи. При этом, на рабочем дисплее отражаются данные поступающие с датчиков полевых станций и с датчика электромагнитного излучения при трещинообразовании во льду, установленного в блоке 8 (фиг. 1, 2) и размещенного на БЛА 7 (фиг. 1, 2). Видеоизображение с камер фиксации в видео или ИК диапазонах, также размещенных в блоке 8 (фиг. 1, 2) на БЛА 7 (фиг. 1, 2), поступает на дополнительный дисплей. Информация, поступающая на рабочий дисплей, обеспечивает возможность оперативно выделить предикторы разломов ледяного поля, а видеоизображение на дополнительном дисплее дает возможность оценить развитие ситуации на месте и дать заблаговременный прогноз опасного явления в определенном временном диапазоне. Кроме того, вся информация с модуля базовой станции 5 (фиг. 1 и 4) поступает на спутниковую антенну 10 (фиг. 1 и 4) и через ИС3-ретранслятор 11 (фиг. 1 и 4) далее передается в удаленный центр накопления и обработки данных.
Работа универсальной модульно-блочной системы мониторинга состояния ледяного покрова при установке на припай реализуется аналогичным образом, что и при развертывании системы на дрейфующем ледяном поле. Отличием является установка на льду припая трех модулей полевых станций 1, 2, 3 (фиг. 5) по треугольной схеме. Расстояние между полевыми станциями выбирается в зависимости от решаемых задач. На берегу устанавливается 4-й модуль полевой станции, в котором подключается трехкомпонентный сейсмометр к блоку регистрации сигналов Б-2 (фиг. 2). Сейсмометр Д4 (фиг. 2), как и датчики на льду, ориентируется по странам света Север-Юг, Запад-Восток. Вследствие того, что припай является условно неподвижным, а четвертая станция находится на берегу, координаты полевых станций при помощи приемников сигналов глобальной спутниковой системы позиционирования Д5 (фиг. 2) определяются один раз в начале работы. Модуль базовой станции 5 (фиг. 4) разворачивается на берегу. Рабочая настройка и проверка полевых станций и беспилотного летательного аппарата 7 (фиг. 1 и 5) первоначально осуществляется с помощью защищенного ноутбука, который на фиг. 1, 2, 3, 4, 5 не указан. В дальнейшем контроль и управление полевыми станциями и беспилотным летательным аппаратом проводят с базовой станции. В результате при помощи модульных полевых станций, развернутых на припае, определяется развитие напряженно-деформированного состояния ледяного полигона на припае и изменения в характере волновых полей во льду, а 4-я станция, с подключенным трехкомпонетным сейсмометром, дополнительно характеризует состояние контакта припая с береговым грунтом на основании чего выявляются предикторы разрушения льда или признаки отрыва припая. При этом видео наблюдения, проводимые с помощью БЛА, обеспечивают возможность дополнительно характеризовать развития таких процессов в ледяном покрове.
В месте нахождения базовой станции на берегу устанавливается спутниковая антенна 10 (фиг. 1 и 5) для передачи информации на ИС3-ретранслятор 11 (фиг. 1 и 5) и далее в удаленный центр накопления и обработки данных.
Использованные источники
1. Смирнов В.Н., Шушлебин А.И. Результаты наблюдений за естественными деформациями ледяных полей. Изв. АН СССР. ФизикаЗемли. 1988. №12. С. 75-78.
2. Смирнов В.Н., Шушлебин А.И., Ковалев С.М. Патент на полезную модель №84999 «Система для определения времени и координат места образования айсбергов выводных ледников». Приоритет полезной модели 25.11.2008. Зарегистрировано в Гос. реестре полезных моделей РФ 20.07.2009.
3. Смирнов В.Н., Знаменский М.С., Шушлебин А.И., Ковалев С.М. Патент на изобретение №2621276 «Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби» Приоритет полезной модели 08.04.2016. Зарегистрировано в Гос.реестре изобретений РФ 02.06.2017.
4. Смирнов В.Н., Степанюк И.А. «Методы измерений характеристик динамики ледяного покрова» Санкт-Петербург Гидрометеоиздат 2001. С. 30-48
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби | 2016 |
|
RU2621276C1 |
| Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби | 2020 |
|
RU2727081C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕМЕНИ И КООРДИНАТ МЕСТА ОБРАЗОВАНИЯ АЙСБЕРГОВ ВЫВОДНЫХ ЛЕДНИКОВ | 2009 |
|
RU2427011C1 |
| Активный плавучий автономный регистратор данных | 2024 |
|
RU2834079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ОБРАЗОВАНИЯ АЙСБЕРГОВ ВЫВОДНЫХ ЛЕДНИКОВ | 2014 |
|
RU2577917C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
Изобретение относится к системам мониторинга состояния ледяного покрова. Сущность: система включает четыре полевые ледовые станции (1-4), базовую станцию (5) сбора и обработки данных с полевых станций, беспилотный летательный аппарат (7) вертолетного типа, радиоканалы связи и управления с базовой станции полевыми станциями. Беспилотный летательный аппарат вертолетного типа снабжен блоком (8) датчиков, включающим камеру фото- и видеофиксации в видимом диапазоне, камеру фото- и видеофиксации в инфракрасном диапазоне, датчик приема электромагнитного излучения, и блоком (9) приемо-передающей антенны, связывающим беспилотный летательный аппарат (7) с базовой станцией (5). Базовая станция (5) снабжена устройством управления беспилотным летательным аппаратом и приема и записи на сервер сигналов с датчиков, поступающих с беспилотного летательного аппарата. Причем передаваемые с датчиков сигналы записываются на сервер и одновременно поступают через компьютер на дополнительный монитор. Технический результат: расширение функциональных возможностей и повышение точности прогноза отрыва припая и разлома дрейфующих ледяных полей. 5 ил.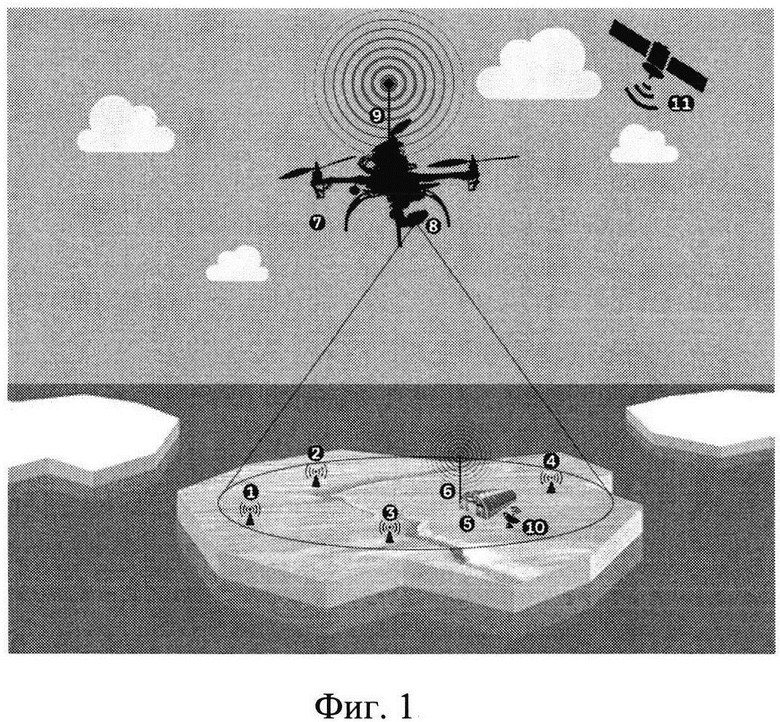
Универсальная модульно-блочная система мониторинга состояния ледяного покрова, включающая четыре полевые ледовые станции, базовую станцию сбора и обработки данных с полевых станций с выводом информации на монитор, радиоканалы связи и управления с базовой станции полевыми станциями, отличающаяся тем, что система дополнена модулем, состоящим из беспилотного летательного аппарата вертолетного типа, снаряженным блоком, включающим камеру фото- и видеофиксации в видимом диапазоне, камеру фото- и видеофиксации в инфракрасном диапазоне, датчик приема электромагнитного излучения, и блоком приемо-передающей антенны, связывающим беспилотный летательный аппарат вертолетного типа с базовой станцией, а базовая станция дополнена устройством управления беспилотным летательным аппаратом и приема и записи на сервер сигналов с датчиков, поступающих с беспилотного летательного аппарата вертолетного типа, которые записываются на сервер и одновременно поступают через компьютер на дополнительный монитор.
| CN 105775141 A, 20.07.2016 | |||
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби | 2016 |
|
RU2621276C1 |
| CN 105607100 А, 25.05.2016. | |||

