Изобретение относится к сельскому хозяйству, в частности, к беспилотным привязным авиационным комплексам для дифференцированного внесения пестицидов, удобрений и других агрохимикатов в системе точного земледелия.
Известен способ управления беспилотным привязным летательным аппаратом (БПЛА), включающий его подъем на заданную высоту, управление положением, стабилизацию БПЛА и беспилотный авиационный комплекс (БАК), содержащий наземную станцию, БПЛА с движителем, привязь, включающую силовой трос, связывающий наземную станцию с БПЛА, и многофункциональный кабель, а также механизм для регулирования длины привязи и систему управления положением и стабилизации БПЛА с датчиками его пространственного положения. При управлении БПЛА обеспечивают режим его движителя, при котором подъемная сила превышает вес БПЛА вместе с привязью. Высоту подъема БПЛА задают длиной силового троса, а управление положением и стабилизацию БПЛА осуществляют с помощью отдельного управляющего троса, длину которого изменяют по сигналу датчиков, фиксирующих пространственное положение БПЛА. Механизм для регулирования длины управляющего троса может быть установлен на наземной станции комплекса или в носовой части летательного аппарата. В последнем случае управляющий трос может быть присоединен к силовому тросу. БПЛА связан с силовым тросом через шарнирный механизм (патент РФ № 2441809, МПК В 64 С 39/02, 2009 г.).
Недостатком известного беспилотного авиационного комплекса является узкая технологическая направленность, низкая маневренность, вследствие чего данный комплекс не может быть использован для обработки сельскохозяйственных угодий пестицидами, для дифференцированного внесения удобрений и других агрохимикатов в системе точного земледелия.
Известно устройство для опрыскивания с вертолета сельскохозяйственных и лесных угодий средствами защиты растений, включающее бак для рабочих растворов пестицидов, насосный агрегат, гидравлический клапан, трубопроводы, соединяющие насосный агрегат последовательно с клапаном и штангой с распылителями длиной, составляющей 0,3-0,35 диаметра несущего винта вертолета, прикрепленную к вертолету с помощью кронштейна, при этом в средней части штанги распылители размещены в два ряда в шахматном порядке с углом между осями распылителей в первом и втором ряду не менее 40° (Патент RU 1№ 586042, МПК B 64 D 1/18, 1988).
Недостатком известного устройства является небольшая рабочая ширина захвата, приводит к недостаточной производительности выполнения авиационно-химических работ вертолетом, при этом в соответствии с Федеральными авиационными правилами «Подготовка и выполнение полетов в гражданской авиации» (Приказ Министра РФ от 31.07.2009 №128) полеты при обработке участков (полей, садов, виноградников) в равнинной местности должны выполняться на высоте не ниже 5 м, а над верхушками отдельных деревьев леса - не ниже 10 м. Такая высота полета и, соответственно, высота обработки агроценозов и плодовых деревьев в 10-20 раз больше высоты обработки растений пестицидами наземной техникой, что вызывает потери пестицидов, загрязнение ими окружающей среды выше предельно-допустимых концентраций.
Известен комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации, содержащий пилотируемый базовый вертолет с пультом управления, оснащенный бортовым компьютером, приемником сигналов глобальной спутниковой навигационной системы, блоком подачи и распределения жидких средств химизации, гидрорезервуарами для жидких средств химизации, насосами, трубопроводами и трубопроводной арматурой, соединенный гибким силовым тросом, электрокабелем и трубопроводами с беспилотным летательным аппаратом вертолетного типа, включающим приемник навигационных сигналов, бортовой компьютер, штангу с форсунками, выполненную в виде горизонтально расположенного полого эллиптического цилиндра с внутренними полыми эллиптическими цилиндрами, в каждой полости которых предусмотрены подвод и запитка жидких средств химизации из гидрорезервуаров (патент РФ № 2622617, МПК B 64 D 1/18, 2016 г.).
Недостатком известного комплекса летательных аппаратов является то, что на борту базового вертолета необходимо иметь запас топлива или энергетический аккумулятор, а также емкости для жидких средств химизации, это увеличивает габаритные размеры и массу базового вертолета и, как следствие, приводит к повышенному расходу топлива, при этом базовый вертолет при выработке авиатоплива и жидких средств химизации должен осуществить посадку вместе с беспилотным летательным аппаратом на специальную посадочную площадку, поскольку в соответствии с требованиями безопасности при применении пестицидов и агрохимикатов авиационным методом (Санитарные правила и нормативы СанПиН 1.2.2584-10 от 25.05.2010 г.) рабочие растворы препаратов готовятся и загружаются в воздушное судно на специально оборудованных загрузочных площадках, расположенных на сельскохозяйственных аэродромах, а в соответствии с технологией обеспечения воздушных судов авиатопливом заправка топливом должна производиться также на специальных площадках (ГОСТ Р 18.12.02-2017 Технологии авиатопливообеспечения. Оборудование типовых схем авиатопливообеспечения. Общие технические требования). Вследствие необходимости постоянных посадок базового вертолета для заправок топливом и рабочими жидкостями взлетов и перелетов к прерванной точке полета, снижается производительность выполнения технологического процесса и увеличивается себестоимость дифференцированного внесения пестицидов, удобрений и других агрохимикатов беспилотным авиационным комплексом.
Технической задачей изобретения является повышение производительности технологического процесса дифференцированного внесения пестицидов, удобрений и других агрохимикатов в точном земледелии, снижение себестоимости авиационно-химических работ в сельском хозяйстве, повышение эффективности и качества обработки сельскохозяйственных полей, садовых насаждений, виноградников, независимо от рельефа местности, снижение рисков загрязнения окружающей среды пестицидами, удобрениями и другими агрохимикатами.
Поставленная техническая задача достигается тем, что в беспилотном привязном авиационном комплексе для внесения пестицидов и агрохимикатов в точном земледелии, содержащем привязной беспилотный летательный аппарат вертолетного типа сосной схемы с фюзеляжем, опорами шасси, силовой установкой с двигателем, трансмиссией, топливной системой, несущими винтами, автоматической пилотажной - навигационной системой управления, блоком распределения и подачи рабочей жидкости к модулю внесения, блоком управления системой внешней подвески, многофункциональным устройством подсоединения привязи, систему внешней подвески модуля внесения, мобильную наземную станцию с блоком управления, базовой дифференциальной станцией, барабанным механизмом с электроприводом, многофункциональную привязь, связывающую мобильную наземную станцию с беспилотным летательном аппаратом, согласно изобретению система внешней подвески снабжена блоком подъема-опускания с барабанами для наматывания - сматывания строп и троса с независимыми электроприводами, закрепленным под фюзеляжем с вертикальной осью центра симметрии, совпадающей с вертикальной осью несущих винтов беспилотного летательного аппарата и, по крайней мере, четырьмя угловыми удерживающими стропами и одним центральным тросом, связанными с одной стороны с барабанами для наматывания-сматывания строп блока подъема-опускания, а с другой стороны соединенными крепежными элементами с модулем для внесения рабочих жидкостей пестицидов и агрохимикатов, причем, центральный удерживающий трос выполнен многофункциональным, включающим гибкие гидравлические трубопроводы, соединенные с одной стороны с индивидуальными подводами штанги модуля внесения, с другой стороны - с блоком подачи рабочей жидкости к модулю внесения и электрические кабели, соединяющие ультразвуковые датчики со встроенными гироскопами модуля внесения с блоком управления системой внешней подвески, а модуль внесения пестицидов и агрохимикатов выполнен в форме четырехугольной рамы в виде ромба, вытянутого вдоль большей диагонали, совпадающей с продольной осью симметрии штанги с распылителями, закрепленной в углах рамы, прием длина штанги с распылителями равна длине наибольшей диагонали ромба и составляет по крайне мере не менее диаметра несущего винта беспилотного летательного аппарата, при этом распылители установлены с шагом расстановки, обеспечивающим, по крайней мере, двойное перекрытие ширины факелов распыла рабочей жидкости на минимальной рабочей высоте положения штанги над обрабатываемой поверхностью поля, и сама штанга с распылителями может быть параллельна поверхности обрабатываемого поля или один из ее конечных элементов может опускаться или подниматься за счет изменения длины строп и троса с максимальным значением угла α равным, по крайней мере, не менее 45° между горизонталью, перпендикулярной вертикальной оси беспилотного летательного аппарата и продольной осью штанги, а многофункциональное устройство подсоединения привязи от наземной станции к беспилотному летательному аппарату смонтировано за фюзеляжем беспилотного летательного аппарата и расположено по вертикали между днищем фюзеляжа и задними опорами шасси и снабжено поворотной многоканальной и многоконтактной муфтой с электроприводом, к которой с одной стороны подсоединены топливопровод, гидравлические трубопроводы, электрический кабели, информационный кабель, соединенные другими концами с топливным модулем, модулем приготовления и подачи рабочих жидкостей пестицидов, удобрений и других агрохимикатов, источником электроэнергии, блоком управления наземной станцией соответственно, с другой стороны муфта подсоединена через линию подачи топлива с расходным топливным баком, гидролиниями соединена с блоком распределения и подачи рабочей жидкости к модулю внесения, электрическим кабелем с силовой установкой, информационным кабелем с бортовым компьютером пилотажно-навигационной системы беспилотного летательного аппарата.
Изобретение поясняется чертежами.
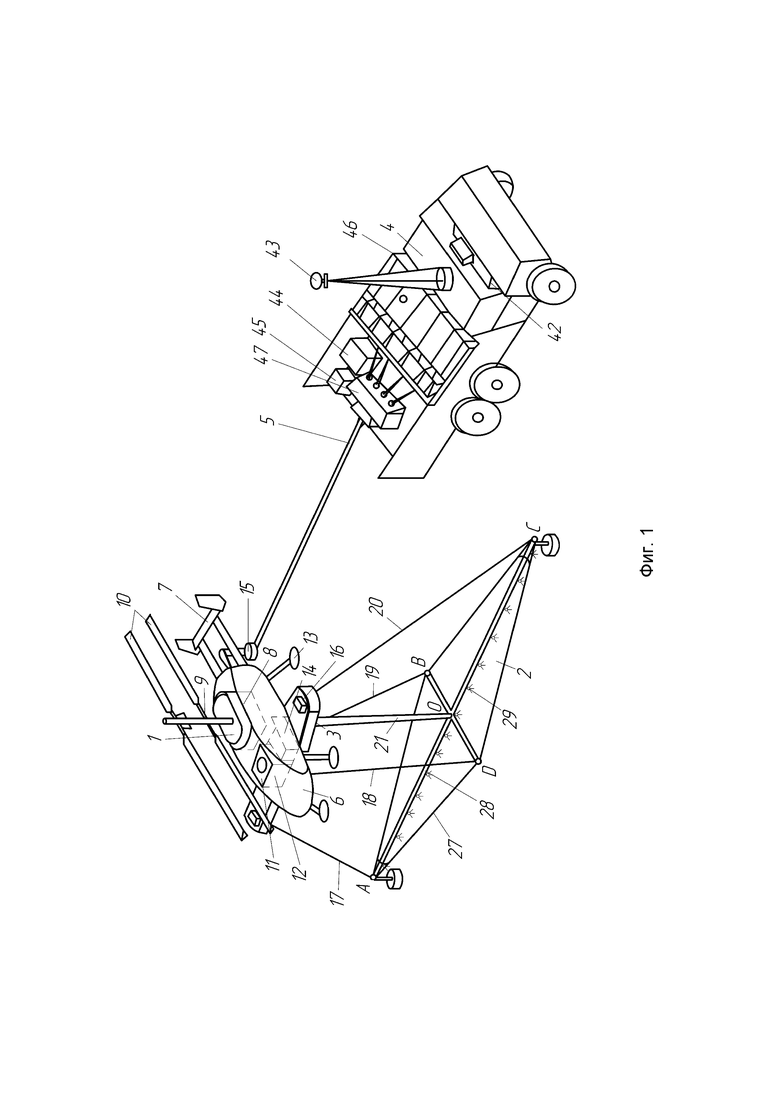
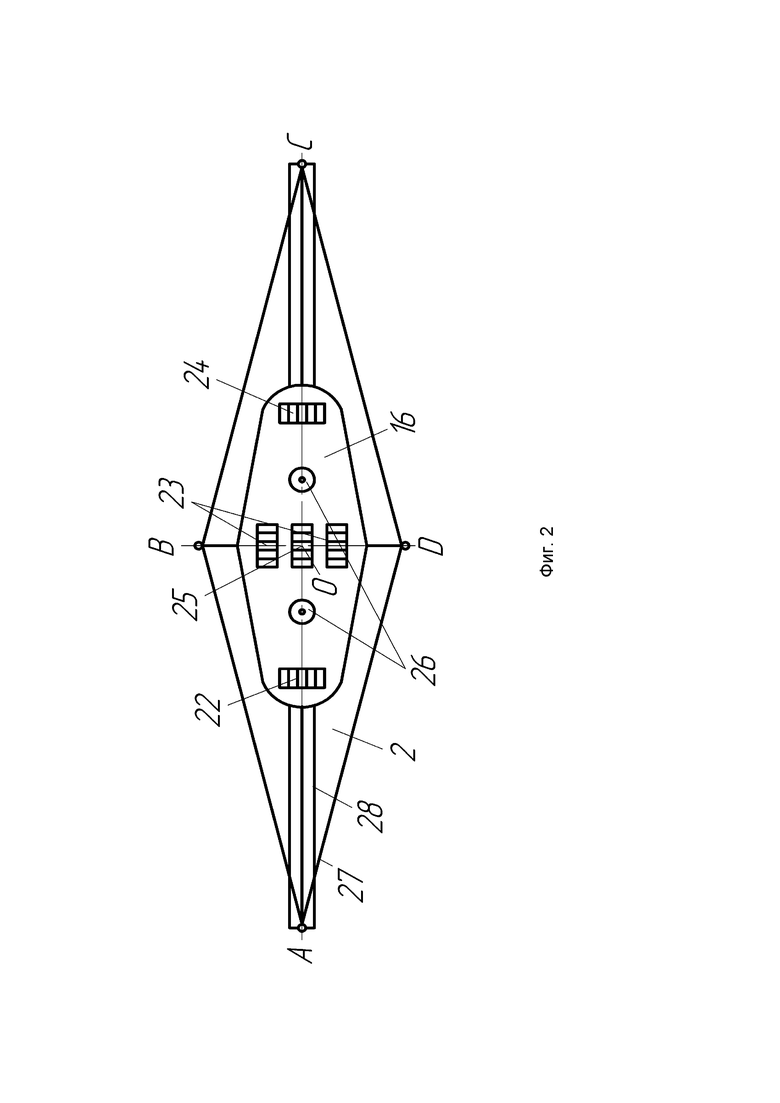
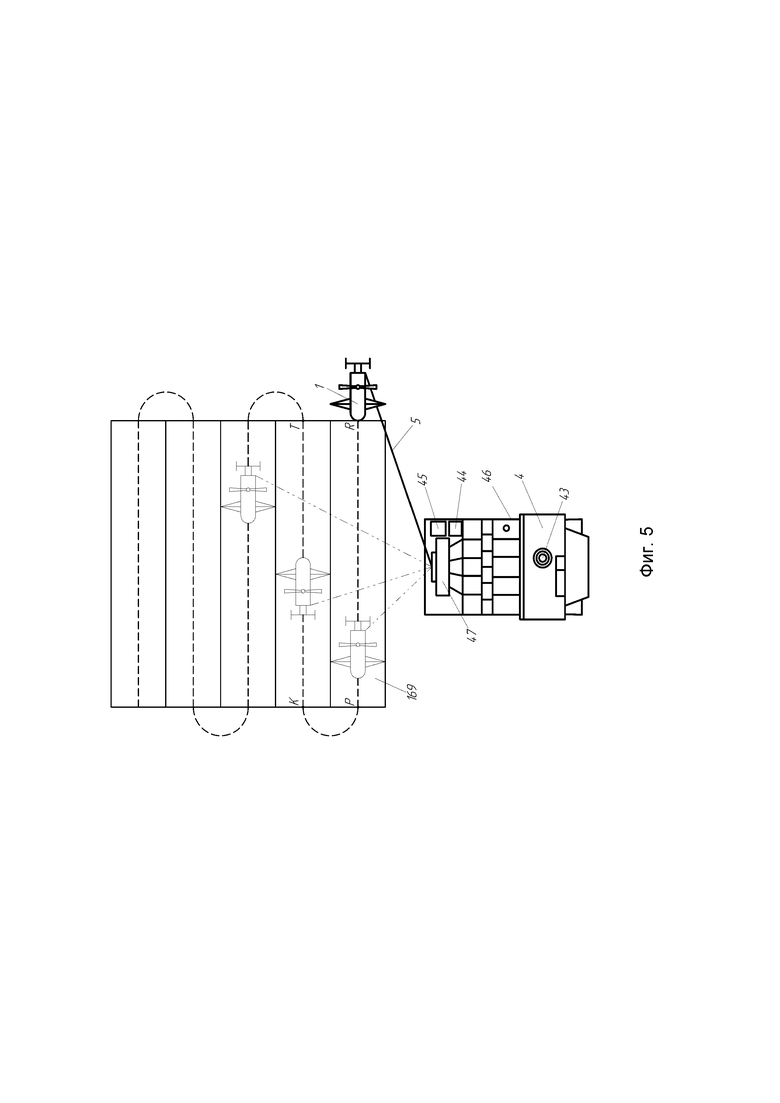
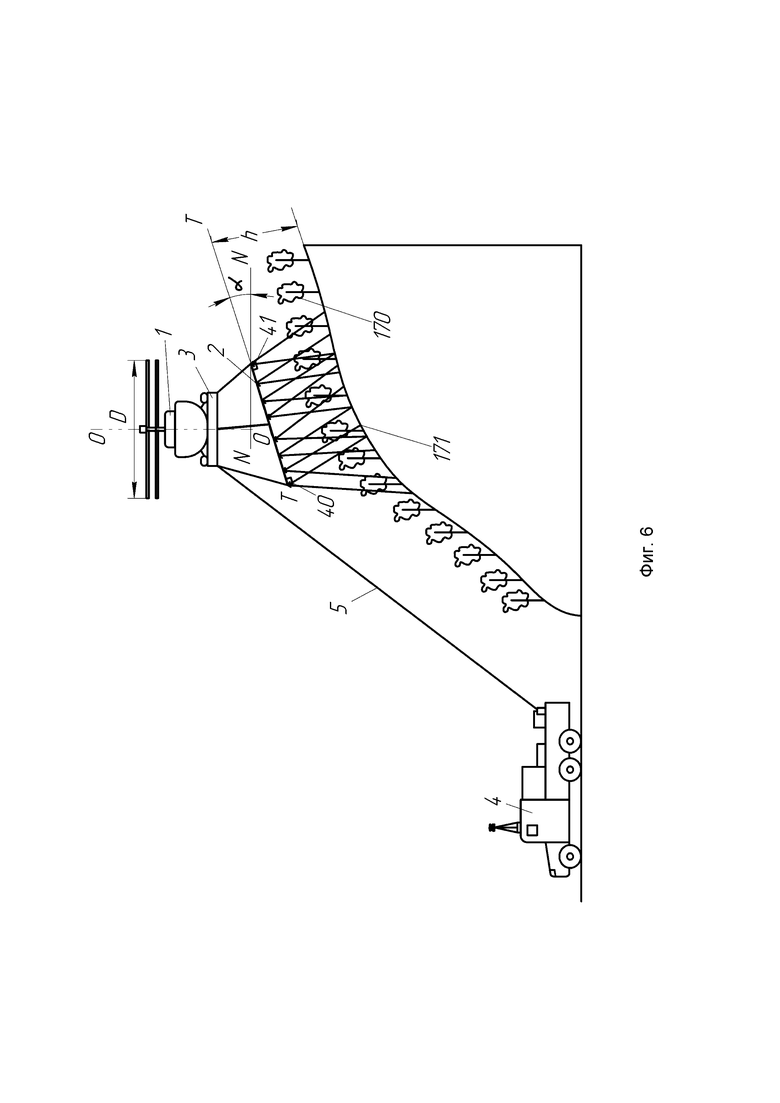
На фиг.1 - общий вид беспилотного привязного авиационного комплекса для внесения пестицидов и агрохимикатов; на фиг.2 - система внешней подвески модуля для внесения пестицидов и агрохимикатов, вид сверху; на фиг.3 - принципиальная технологическая схема оборудования для обеспечения внесения пестицидов, удобрений и других агрохимикатов; на фиг.4 - схема подачи топлива к беспилотному летательному аппарату; на фиг.5 - схема работы привязного авиационного комплекса на сельскохозяйственном поле; на фиг.6 - схема работы привязного авиационного комплекса на горном склоне.
Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии содержит привязный к наземной станции беспилотный летательный аппарат вертолетного типа сосной схемы (БЛА) 1, модуль для внесения пестицидов, удобрений и других агрохимикатов 2, систему внешней подвески 3 модуля 2, наземную мобильную станцию 4 привязного питания топливом, электроэнергией, передачи информации, подачи рабочих жидкостей пестицидов и агрохимикатов на борт БЛА 1, привязь 5, связывающую наземную станцию 4 с БЛА 1.
Беспилотный летательный аппарат 1 включает фюзеляж 6, хвостовое оперение 7, силовую установку 8 с двигателем, трансмиссией и топливной системой, колонку 9, несущие винты 10, автоматическую пилотажную - навигационную систему управления 11 на базе бортового компьютера комплексированного с приемником сигналов глобальной спутниковой навигационной системы и инерциальными датчиками пространственной ориентации, блок управления 12 системой внешней подвески, опоры шасси 13, блок 14 распределения и подачи рабочей жидкости к модулю внесения 2, многофункциональное устройство 15 подсоединения привязи от наземной станции 4 к БЛА 1 посредством шарнирного механизма с многоканальной гидравлической и электрической многоконтактной поворотной муфтой с электрошаговым приводом, имеющей каналы для рабочей жидкости и контакты для передачи электричества и информации независимо от угла поворота муфты. Многофункциональное устройство 15 подсоединения привязи и передачи рабочей жидкости, электрического тока и информации смонтировано за фюзеляжем 8 беспилотного летательного аппарата и расположено по вертикали между днищем фюзеляжа и задними опорами 13 шасси.
Система внешней подвески модуля внесения включает блок 16 подъема – опускания модуля 2, совокупность, по крайней мере, четырех угловых удерживающих строп 17, 18, 19, 20 и одного центрального многофункционального троса 21 с закрепленными на нем гидравлическими гибкими трубопроводами и электрического кабеля. Стропы 17, 18, 19, 20 и трос 21 соединены крепежными элементами с одной стороны с модулем 2 для внесения пестицидов и агрохимикатов, другой стороны с барабанами для наматывания-сматывания строп 22, 23, 24 и барабаном 25 для наматывания-сматывания центрального троса 21 блока подъема-опускания 16 системы внешней подвески 3. Центральный трос 21, кроме регулирующей функции, является силовым, воспринимает всю массу модуля 2, независимо от его положения над обрабатываемой поверхностью. Боковые стропы 17, 18,19,20 служат для предотвращения раскачки модуля 2, а также для подъема концов модуля 2.
Блок подъема-опускания 16 закреплен снаружи под фюзеляжем 6 БЛА 1 в его центральной части, с вертикальной осью центра симметрии, совпадающей с вертикальной осью несущих винтов 10 беспилотного летательного аппарата. Барабаны для наматывания-сматывания строп 22, 23, 24 и барабан 25 для наматывания-сматывания центрального регулирующего троса 21 имеют независимые друг от друга приводы от реверсивных двигателей постоянного тока, соединенных с барабанами через редукторы и фрикционные муфты. Блок 16 имеет устройства 26 для его крепления к фюзеляжу 6 БЛА 1.
Модуль 2 для внесения пестицидов и агрохимикатов представляет собой четырехугольную раму 27 в виде ромба ABCD, вытянутого вдоль большей диагонали AC, совпадающей с продольной осью симметрии и закрепленной в углах DAB и BCD рамы 27 штанги 28, при этом длина штанги 28 с распылителями 29 равна длине наибольшей диагонали AC ромба ABCD, и длина штанги 28 с распылителями 29 составляет по крайне мере не менее одного диаметра D несущего винта БЛА 1. Штанга 28 выполнена в виде набора полых коаксиально расположенных цилиндров 30, 31, 32, 33 с торцевыми заглушками 34, 35, образующих кольцевые полости с индивидуальными подводами 36, 37, 38 , 39 для рабочей жидкости и рядами индивидуальных распылителей 29 на каждом цилиндре 30, 31, 32, 33. Стороны ромба AB, BC, CD, DA и его меньшая диагональ BD являются ребрами жесткости рамы 27, в вершинах ромба A, B, C, D закреплены удерживающие стропы 17, 18, 19, 20, в точке O пересечения диагоналей AC и BD ромба закреплен многофункциональный силовой регулирующий трос 21 совместно с электрическим кабелем, гидравлическими гибкими трубопроводами, соединенными с индивидуальными подводами 36, 37, 38 , 39 с цилиндрами 30, 31, 32, 33 штанги 28, а на концах четырехугольной рамы 27 в точках A и C установлены бесконтактные ультразвуковые датчики 40, 41со встроенными гироскопами, соединенными электрическим кабелем, закрепленным на тросе 21, с блоком управления 12 системой внешней подвески 3. Вершины А и С являются конечными элементами штанги 28. При этом штанга 28 модуля 2 может быть параллельна поверхности обрабатываемого поля или один из ее конечных элементов А или С может опускаться или подниматься за счет изменения длины строп 17, 18, 19 и троса 21 или строп 18, 19, 20 и троса 21 соответственно, с максимальным значением угла α, равным, по крайней мере, не менее 45° между горизонталью N-N, перпендикулярной вертикальной оси O-O БЛА 1 и продольной осью T-T штанги 28.
Наземная станция 4 включает блок управления 42 работой наземной станции с бортовым компьютером, базовую дифференциальную станцию 43 с приемо-передатчиком навигационных сигналов для передачи дифференциальных поправок навигационных сигналов на приемник навигационных сигналов автоматической пилотажно–навигационной системой управления 11, получаемых от глобальной спутниковой навигационной системы, топливный модуль 44 для подачи топлива в топливную систему силовой установки 8 БЛА 1, источник электроэнергии 45, модуль 46 подготовки рабочих жидкостей пестицидов, удобрений, других агрохимикатов, распределения и подачи рабочих жидкостей к БЛА 1, многофункциональную привязь 5, состоящую из гибкого малорастяжимого троса, на котором закреплены электрический кабель, гибкие топливопровод и гидравлические трубопроводы для подачи топлива и рабочих жидкостей к БЛА 1, информационный кабель для связи блока управления 42 наземной станции 4 с бортовой системой управления 11 БЛА 1, барабанный механизм 47 с электрическим двигателем привода барабанного механизма для разматывания и сматывания многофункциональной привязи 5, редуктором и тормозным устройством (не показано).
Блок управления 42 работой наземной станции с бортовым компьютером связаны информационным кабелем с автоматической пилотажной – навигационной системой управления 11 БЛА 1. Базовая дифференциальная станция 43 с приемо-передатчиком навигационных сигналов и пилотажная навигационная система управления 11 полетам БЛА 1 функционально сопряжены.
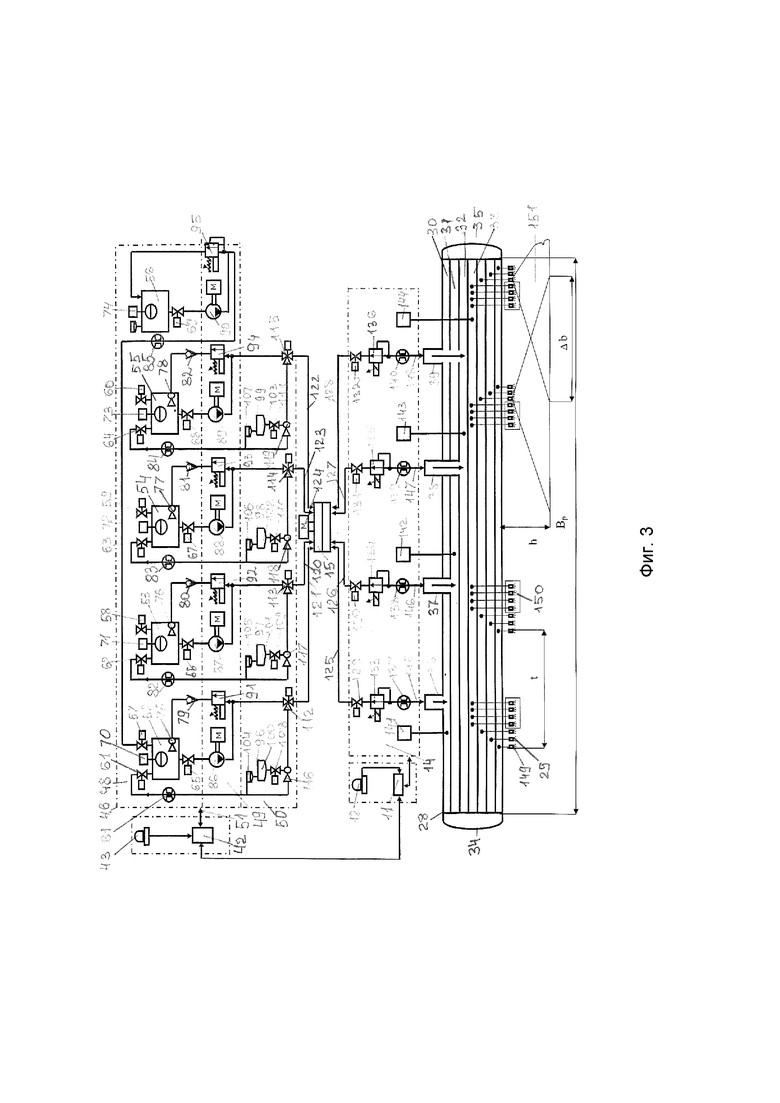
Модуль приготовления 46 рабочих жидкостей пестицидов, удобрений и других агрохимикатов и подачи их к БЛА 1 содержит кассету гидрорезервуаров 48, насосный блок 49 , блок миксеров 50 для пестицидов и азотных удобрений, трубопроводную, запорную и регулирующую электрогидравлическую арматуру.
Модуль 46 связан интерфейсом 51 с блоком 42 управления работой наземной станции 4.
Кассета резервуаров 48 включает резервуары52, 53, 54, 55, 56 для рабочих жидкостей пестицидов, например, гербицидов, инсектицидов, фунгицидов и минерального удобрения, например, жидкого азотного и технической воды соответственно. Резервуары 52, 53, 54, 55, снабжены запорными клапанами с электромагнитным управлением для подачи технической воды в резервуары - клапаны 57, 58, 59, 60, для подачи пестицидов и удобрений – клапаны 61, 62, 63, 64, для подачи рабочей жидкости к насосам – клапаны 65, 66, 67, 68, для подачи воды в резервуар 56 - клапан 69, датчиками уровня жидкости 70, 71, 72, 73, 74, устройствами перемешивания рабочей жидкости 75, 76, 77, 78 с обратными клапанами 79, 80, 81, 82, электронными расходомерами 81, 82, 83, 84, 85 для учета подаваемых в резервуары 52, 53, 54, 55 пестицидов, азотного удобрения и воды.
Насосный блок 49 содержит насосы с электроприводом 86, 87, 88, 89, 90, переливные клапаны с электромагнитным управлением 91, 92, 93, 94, 95 для байпасирования части потока в резервуары 52, 53, 54, 55, 56 для поддержания заданного давления потока на выходе из насосов и перемешивания рабочей жидкости в резервуарах 52, 53, 54, 55.
Блок миксеров 50 включает миксеры для пестицидов 96, 97, 98 и миксер 99 для азотного удобрения. Миксеры 96, 97, 98, 99 содержат емкости 100, 101,102, для пестицидов и емкость 103 для минерального удобрения с заправочными горловинами, 104, 105,106, 107, электромагнитные запорные клапаны 108, 109, 110, 111 и трехходовые электромагнитные запорные клапаны 112,113, 114,115, эжекторы 116, 117, 118, 119. Миксеры 96, 97, 98, 99 через запорные трехходовые клапаны с электромагнитным управлением 112, 113, 114, 115 врезаны в основные гидролинии 120, 121, 122, 123, представляющие собой гибкие гидравлические рукава. Гидролинии 120, 121, 122, 123 соединены с автоматической поворотной многоканальной гидравлической муфтой многофункционального устройства 15 с электроприводом 124. Муфта многофункционального устройства 15 посредством гидролиний 125, 126, 127, 128 соединена с блоком 14 подачи рабочей жидкости к модулю внесения 3 БЛА 1.
Блок распределения и подачи 14 рабочей жидкости пестицидов и удобрений к модулю 3 включает клапаны запорные с электромагнитным управлением 129 ,130, 131, 132, пропорциональные редукционные клапаны 133, 134, 135, 136 прямого действия с электронной регулировкой опорными сигналами, поступающими от бортового компьютера пилотажно-навигационной системы управления 11 БЛА 1, расходомеры 137, 138, 139, 140, датчики давления жидкости 141, 142,143,144. Блок 14 связан гибкими гидравлическими трубопроводами 145, 146, 147, 148 с индивидуальными подводами 36, 37, 38, 39 штанги 28 с распылителями 29. Каждый распылитель 29 снабжен клапаном с электромагнитным управлением 149. Центральная полость цилиндра 33 для жидких минеральных удобрений соединена с блоком150 распылителей с электромагнитным управлением, включающим распылители не менее четырех типоразмеров, характеризующих площадь выходного отверстия сопла каждого распылителя.
Распылители 29 установлены с шагом расстановки t, обеспечивающим, по крайней мере, двойное перекрытие ∆b ширины b факелов распыла 151 на минимальной рабочей высоте h положения штанги 28 над обрабатываемой поверхностью поля. Блок 14 связан интерфейсом с автоматической пилотажной – навигационной системой управления 11 БЛА 1.
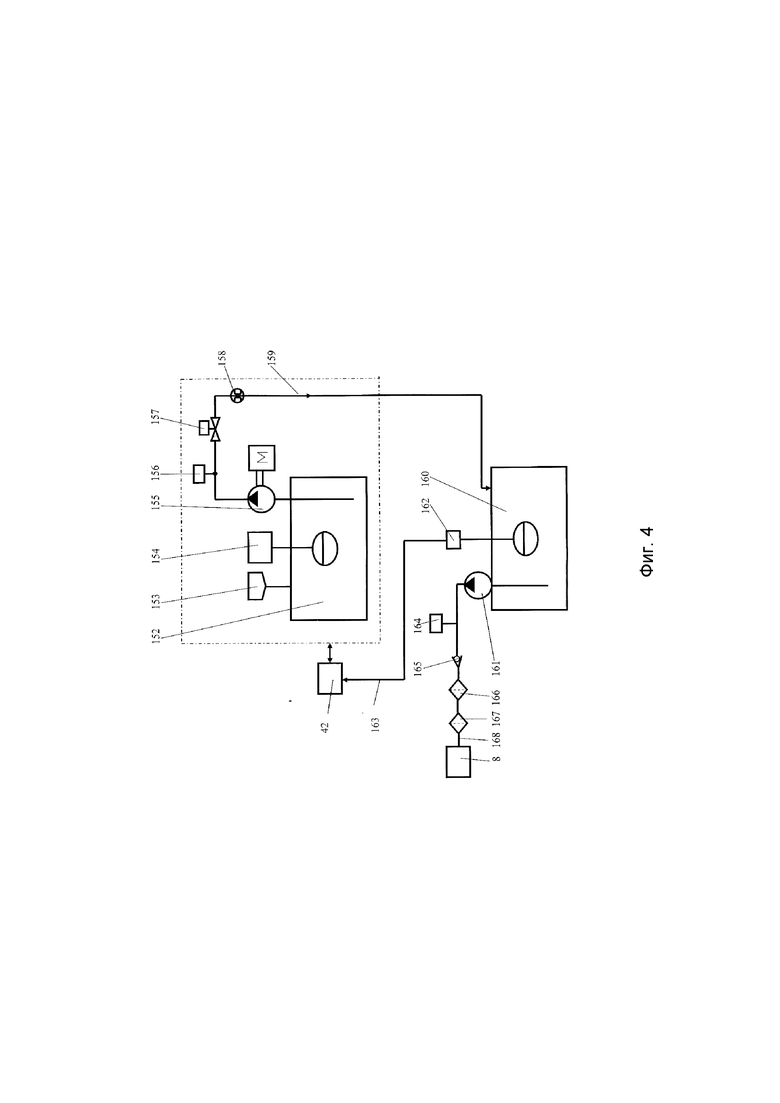
Топливный модуль 44 содержит основной топливный бак 152 с заправочной горловиной 153, датчик уровня топлива 154, насос 155 с электроприводом, датчик давления топлива 156, клапан 157 с электромагнитным управлением нормально закрытый, расходомер 158, линию подачи топлива 159 в расходный топливный бак 160 топливной системы силовой установки 8 БЛА 1. Расходный бак 160 включает насос с электроприводом 161, датчик уровня топлива 162, связанный линией связи 163 с блоком управления 42 работой наземной станции 4, датчик давления 164, обратный клапан 165, фильтры грубой и тонкой очистки 166, 167, соединяемых трубопроводом 168 с насосом – регулятором силой установки 8 БЛА 1.
Автоматическая пилотажная навигационная система управления 11 БЛА 1 обеспечивает управление работой силовой установки 8, формирование управляющих сигналов на электромеханизмы рулевых исполнительных устройств для осуществления взлета, зависания на требуемой высоте, полета по заданной траектории, стабилизации углов ориентации, разворота, посадки БЛА 1, формирование управляющих сигналов и передача их на включение в работу электродвигателей подъемного блока 16 на опускание и подъем модуля внесения 3,фиксации его на заданной высоте, а также передача управляющих сигналов на включение в работу блока 14 подачи рабочей жидкости в модуль внесения.
Навигационный приемник системы управления 11 БЛА 1 учитывает принятые от базовой станции 43 дифференциальные поправки навигационных сигналов, что позволяет с заданной точность определять координаты БЛА 1 в реальном масштабе времени.
Закрепление системы внешней подвески блока подъема-опускания16, с поперечной осью центра симметрии, совпадающей с вертикальной осью несущих винтов беспилотного летательного аппарата обеспечивает невыход центровки из пределов допустимых величин и как, следствие, заданную управляемость БЛА 1 вертолетного типа в процессе полета.
Ультразвуковые датчики 40,41 со встроенными гироскопами служат для определения и контроля высоты и положения модуля 2 относительно обрабатываемой поверхности поля и растений.
Оснащение БЛА 1многофункциональным устройством 15 подсоединения привязи 5 от наземной станции 4 к БЛА 1, выполненным в виде шарнирного механизма с поворотной многоканальной гидравлической и многоконтактной электрической муфтой с автоматическим электроприводом и размещение многофункционального устройства 15 за фюзеляжем 8 БЛА 1 по вертикали между днищем фюзеляжа и задними опорами 13 шасси позволяет избежать закручивание привязи 5 при разворотах БЛА на очередной гон и точно состыковывать каналы подачи рабочей жидкости к блоку 14.
Трос привязи 5 БЛА 1 с наземной станцией 4 не является удерживающим, так как при полете усилие троса на удержание БЛА 1 может влиять на высоту полета, рыскание, крен и тангаж. В данном случае трос привязи 5 является несущим для электрокабеля, гидравлических гибких трубопроводов, информационного кабеля.
Выбор угла α со значением, равным, по крайней мере, не менее 45° между горизонтальной линией N-N, перпендикулярной вертикальной оси O-O БЛА 1 и продольной осью T-T штанги 28, обоснован исходя из необходимости работы беспилотного привязного авиационного комплекса при обработке пестицидами виноградников на склонах гор. Установлено, что оптимальная крутизна склона для виноградников с позиции максимального получения тепла составляет 25- 35° (Смирнов К.В., Калмыкова Т.И., Морозова Г. С. Виноградарство. Агропромиздат. 1987. 368 с.).
Блок управления 42 работой наземной станцией служит для формирования и передачи команд для включения электропривода барабанного механизма 47и разматывания и сматывания привязи 5 на заданную длину в процессе полета БЛА 1, включения в работу модуля подготовки рабочих жидкостей 46, блока насосного оборудования 49для подачи воды в блок миксеров 50 и подачи рабочих растворов из гидрорезервуаров 52, 53, 54, 55 к блоку подачи рабочей жидкости 14 БЛА 1.
Снабжения каждого распылителя 29 клапаном с электромагнитным управлением позволяет отключать распылители 29 на тех участках поля, которые не требуют обработки пестицидами.
Расстановка распылителей 29 на штанге 28, по крайней мере, с двойным перекрытием Δb ширины b факелов распыла 151 на минимальной рабочей высоте h положения штанги 28 над обрабатываемой поверхностью поля обеспечивает равномерное распределения рабочей жидкости в установленных нормах на рабочей ширине внесения Bр при обработке агроценозов и, как следствие, минимизирует загрязнение окружающее среда пестицидами.
Соединение центральной полости цилиндра 33 для жидких минеральных удобрений с блоком распылителей 152 с электромагнитным управлением, включающим распылители 29, по крайней мере, не менее четырех типоразмеров, характеризующих площадь выходного отверстия сопла каждого распылителя 29, позволяет включать в работу одновременно несколько распылителей 29 блока 152, увеличивая при этом общую площадь диспергированного потока рабочей жидкости удобрения или уменьшая ее при отключении распылителей и, как следствие, обеспечивает дифференциацию доз рабочей жидкости вносимого удобрения для каждого обрабатываемого участка в соответствии картой-заданием.
Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии работает следующим образом.
Предварительно разрабатывается электронная карта – задание на внесение пестицидов и удобрений, представляющая собой управляющий алгоритм в электронном виде – программу полета, включающую координаты, начальной и конечной точек полета БЛА, запрограммированную траекторию полета, длину гона каждого прохода сельскохозяйственного поля, параметры разворота на последующий гон - координаты точек разворота, высоты и скорости осуществления разворота, рабочую высоту и рабочую скорость полета БЛА, общую площадь обрабатываемого сельскохозяйственного поля, пространственно привязанные с помощью ГЛОНАСС координаты участков сельскохозяйственного поля, засоренных сорными растениями, пораженных вредителями и болезнями выше порога экономической вредоносности растений, нормы внесения рабочей жидкости гербицидов, инсектицидов и фунгицидов, дозы внесения минерального удобрения в физическом весе, например, дозы жидкого азотного удобрения для некорневой подкормки растений, перепад давления рабочей жидкости на распылителях штанги, рабочую высоту положения модуля внесения со штангой.
Карта-задание переносится с помощью носителя информации в бортовой компьютер пилотажно–навигационной системы управления 11 БЛА 1.
В соответствии с электронной картой – заданием на внесение пестицидов компьютер блока управления 42 наземной станции 4 рассчитывает общую площадь элементарных участков агроценозов, требующих обработки гербицидами, инсектицидами, фунгицидами и некорневой подкорми азотными удобрениями, с учетом норм внесения пестицидов и доз азотных удобрений, определят необходимое количество вносимых пестицидов и удобрений. В бортовой компьютер блока управления работой 42 наземной станции 4 водится программа и режимы приготовления рабочих растворов пестицидов и азотного удобрения с заданной концентрацией действующего вещества каждого вида пестицида и азотного удобрения.
В резервуар 56 модуля 46 заливается техническая вода. В емкости 100, 101, 102, миксеров 96, 97, 98, загружаются пестициды, например, гербициды, инсектициды и фунгициды соответственно, в емкость 103 миксера 99 заливается жидкое азотное удобрение.
В соответствии с программой приготовления рабочей жидкости бортовой компьютер блока 42 наземной станции 4 передает управляющие сигналы на открытие запорных электромагнитных клапанов 57, 58, 59, 60, 69 модуля приготовления рабочих жидкостей 46 и на включение в работу насоса 90.
Насос 90 подает заданное количество воды, контролируемого расходомером 85, по гидролинии в резервуары 52, 53, 54, 55, наполняя их до определенного уровня, контролируемого уровнемерами 70,71, 72, 73, 74.
После наполнения резервуаров 52, 53, 54, 55, насос 90 отключается, клапаны 57, 58, 59, 60, 69 закрываются, клапаны 65, 66, 67, 68 открываются, клапаны 112, 113, 114, 115 открываются на проход потока воды к миксерам 96, 97, 98, 99, включаются насосы 86, 87, 88, 89, вода под давлением от насосов 86, 87, 88, 89 поступает по гидролиниям в трехходовые клапаны 112, 113, 114, 115 и далее в эжекторы 116, 117, 118, 119 миксеров 96, 97, 98, 99, посредством которых эжектируются необходимые количества пестицидов и жидкого азотного удобрения, контролируемые расходомерами 81,82, 83,84, и далее в резервуарах 52, 53, 54, 55 смесь перемешивается байпасными потоками воды, поступающими через клапаны 91, 92, 93, 94 в смесители 75, 76, 77, 78. После приготовления заданных рабочих жидкостей клапаны 61, 62, 63, 64 и клапаны 112, 113, 114, 115 на перекрытие потока воды в миксер 96, 97, 98, 99 закрываются.
Основной топливный бак 152 топливного модуля 44 через заправочную горловину 153 заправляется топливом с контролем уровня посредством датчика уровня топлива 154.
Наземный комплекс 4 устанавливается на краю поля. БЛА 1 размещается в точке взлета R. Модуль 2 поднят и находится под фюзеляжем 6 БЛА 1. Привязь 5 от наземной станции 4 к БЛА 1 подсоединяется к шарнирному механизму с поворотной многоканальной и многоконтактной муфтой с автоматическим электроприводом. Источник электроэнергии 45 наземного комплекса 4 подает электрический ток к электрооборудованию наземного комплекса 4 и по электрокабелю привязи 5 к электрооборудованию БЛА 1. По сигналу от блока управления 42 открывается электромагнитный клапан 157, включается в работу насос 155, топливо с контролем давления подачи по датчику 156, и с контролем расхода расходомером 158 заданного количества подачи топлива по топлипроводу 159 поступает в расходный бак 160 БЛА 1. Бак 160 заполняется топливом с контролем объема датчиком уровня топлива 162. Из расходного бака 160 насосом 161 топливо под заданным давлением, контролируемым датчиком давления 164, через обратный клапан 165, фильтры грубой и тонкой очистки 166 и 167 по топливопроводу 168 подается к насосу – регулятору силой установки 8 БЛА 1.
Включается система управления 11 БЛА 1. От системы управления 11 подаются управляющие сигналы на включение в работу силовой установки 8 и формируются управляющие сигналы на электромеханизмы рулевых исполнительных механизмов для осуществления взлета БЛФ 1 и зависание его на заданной рабочей высоте полета. БЛА 1 взлетает и зависает на заданной высоте. При этом электрический двигатель барабанного механизма 47 вращает барабан, и привязь 5 разматывается совместно с электрическим кабелем, гидравлическими гибкими трубопроводами и информационным кабелем. От системы управления 11 БЛА 1 подается управляющий сигнал на включение реверсивных двигателей подъемного блока 16, которые приводят во вращение барабаны со стропами 17, 18, 19, 20 и барабан регулирующего троса 21. Стропы 17, 18, 19, 20 и трос 21 разматываются и опускают модуль 2 на заданную высоту. От бортового компьютера автоматической пилотажной - навигационной системы управления 11 управляющий сигнал передается в блок 14 подачи рабочей жидкости к модулю внесения 2, клапаны 129,130,131,132 открываются. Рабочие жидкости гербицида, инсектицида, фунгицида и азотного удобрения из резервуаров 52, 53, 54, 55 подаются насосами 86, 87, 88, 89 через открытые клапаны 112, 113, 114, 115 по гидролиниям 120, 121, 122, 123 в многофункциональное устройство15, из которой по гидролиниям 125, 126, 127, 128 поступают в редукционные клапаны с пропорциональным управлением 133,134, 135, 136, устанавливающие заданное давление рабочей жидкости, и далее через индивидуальные подводы 36, 37, 38, 39 соответственно в полости цилиндров 30, 31, 32, 33 штанги 27.
Бортовой компьютер автоматической пилотажно-навигационной системой управления 11 БЛА 1 передает управляющие сигналы на старт БЛА 1.
БЛА 1 осуществляет полет по заданному маршруту, определенному программой полета, на основании карты – задания на внесение пестицидов и удобрений. В процессе полета БЛА 1 с помощью приемника навигационных сигналов с учетом дифференциальных поправок, получаемых от базовой дифференциальной станции 43, определяет пространственные координаты своего положения в каждый данный момент времени, а также координаты участков поля, отличающихся по нормам внесения рабочей жидкости пестицидов и дозам внесения удобрений, и передает полученные значения в бортовой компьютер автоматической пилотажно-навигационной системы управления 11, который идентифицирует координаты, полученные от приемника навигационных сигналов, с координатами, заданными на электронной карте - задании обработки поля и в соответствии с ней дает управляющие сигнала в блок 14 распределения и подачи рабочей жидкости к модулю внесения 2. Клапаны 149 форсунок 29 работают в режиме « включено - выключено» и открываются для диспергирования рабочих жидкостей форсунками 29 там, где требуется обработка участков агроценозов, засоренных сорными растениями, пораженных вредителями и болезнями. При внесении азотных удобрений дифференциация доз осуществляется включением в работу одной или несколько форсунок блока 150, в зависимости от требуемой для участка дозы азотной подкормки. В процессе полета электрический двигатель барабанного механизма 47 вращает барабан, и привязь 5 разматывается или сматывается совместно с электрическим кабелем, гидравлическими гибкими трубопроводами и информационным кабелем. При достижении БЛА 1 точки разворота Р блок 14 передает управляющие сигналы на клапаны 149 и в блок 150, который выключает форсунки 29 из работы. Бесконтактные ультразвуковые датчики 40,41 со встроенными гироскопами контролируют высоту и положение модуля 2 над обрабатываемыми растениями. При развороте БЛА 1 на другой гон К-Т блок 14 передает управляющий сигнал на автоматический электропривод 124, который поворачивает многоканальную гидравлическую муфту многофункционального устройства 15, совмещая каналы входа рабочих жидкостей от модуля приготовлении 46 с каналами подачи рабочей жидкости блок 14, при этом шарнирный механизм обеспечивает стабилизацию привязи 5 при развороте БЛА 1.
При обработке БЛА 1 плантаций 169 виноградников, цитрусовых, ореховых насаждений 170 на склонах 171 гор штанга 28 посредством блока 16 устанавливается под углом α к горизонту, но параллельно поверхности склона 171. За счет контроля ультразвуковыми датчики 40 и 41со встроенными гироскопами расстояния h от штанги 28 до обрабатываемой поверхности параллельность штанги 28 при полете БЛА 1 сохраняется постоянной.
Применение беспилотного привязного авиационного комплекса обеспечит повышение производительности выполнения авиационно-химических работ в сельском хозяйстве, снижение их себестоимости в точном земледелии, повышение эффективности и качества дифференцированного внесения пестицидов, удобрений и других агрохимикатов, снижение рисков загрязнения окружающей среды до предельно допустимых концентраций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
Изобретение относится к области авиации, в частности, к конструкциям беспилотных привязных авиационных комплексов для дифференцированного внесения удобрений и агрохимикатов в системе точного земледелия. Беспилотный привязной авиационный комплекс содержит беспилотный летательный аппарат вертолетного типа сосной схемы (БЛА) (1), модуль для внесения удобрений и агрохимикатов (2), систему внешней подвески (3) модуля (2), мобильную наземную станцию (4) питания топливом, электроэнергией, передачи информации, подачи рабочих жидкостей на борт БЛА (1), многофункциональную привязь (5). Система внешней подвески снабжена блоком подъема-опускания (16) с барабанами (22-25) с независимыми электроприводами для наматывания - сматывания строп (17-20) и многофункционального троса 21. Модуль (2) выполнен в виде ромба со штангой (28) с распылителями (29). Длина штанги составляет не менее одного диаметра несущего винта беспилотного летательного аппарата. Один из конечных элементов штанги с распылителями может опускаться или подниматься на угол не менее 45°. Обеспечивается повышение эффективности и качества обработки сельскохозяйственных полей, насаждений, виноградников, независимо от рельефа местности. 6 ил. 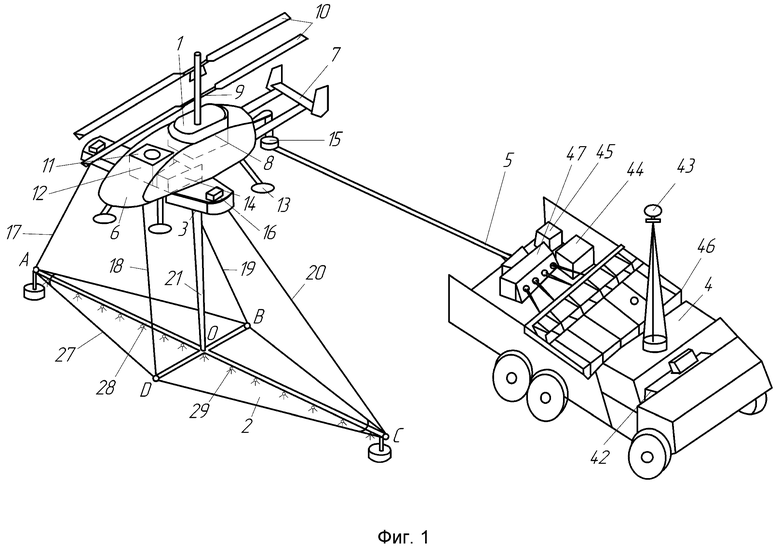
Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии, содержащий беспилотный летательный аппарат вертолетного типа соосной схемы с фюзеляжем, опорами шасси, силовой установкой с двигателем, трансмиссией, топливной системой, несущими винтами, автоматической пилотажно-навигационной системой управления, блоком распределения и подачи рабочей жидкости к модулю внесения, блоком управления системой внешней подвески, многофункциональным устройством подсоединения привязи, систему внешней подвески модуля внесения, мобильную наземную станцию с блоком управления, базовой дифференциальной станцией, барабанным механизмом с электроприводом, многофункциональную привязь, связывающую мобильную наземную станцию с беспилотным летательным аппаратом, отличающийся тем, что система внешней подвески снабжена блоком подъема-опускания с барабанами с независимыми электроприводами, закрепленными под фюзеляжем с вертикальной осью центра симметрии, совпадающей с вертикальной осью несущих винтов беспилотного летательного аппарата и, по крайней мере, четырьмя угловыми удерживающими стропами и одним центральным многофункциональным тросом, связанными с одной стороны с барабанами для наматывания-сматывания строп блока подъема-опускания, а с другой стороны, соединенными крепежными элементами с модулем для внесения рабочих жидкостей пестицидов, удобрений и агрохимикатов, причем центральный удерживающий трос выполнен многофункциональным, включающим гибкие гидравлические трубопроводы, соединенные с одной стороны с индивидуальными подводами штанги модуля внесения, с другой стороны с блоком подачи рабочей жидкости к модулю внесения, и электрические кабели, соединяющие ультразвуковые датчики со встроенными гироскопами модуля внесения с блоком управления системой внешней подвески, а модуль внесения пестицидов и агрохимикатов выполнен в форме четырехугольной рамы в виде ромба, вытянутого вдоль большей диагонали, совпадающей с продольной осью симметрии штанги с распылителями, закрепленной в углах рамы, причем длина штанги с распылителями равна длине наибольшей диагонали ромба, по крайне мере, не меньше диаметра несущего винта беспилотного летательного аппарата, при этом распылители установлены с шагом расстановки, обеспечивающим, по крайней мере, двойное перекрытие ширины факелов распыла рабочей жидкости на минимальной рабочей высоте положения штанги над обрабатываемой поверхностью поля, штанга с распылителями установлена с возможностью изменения угла наклона одного из ее конечных элементов, по крайней мере, не менее чем на 45° между горизонтальной прямой и продольной осью штанги, многофункциональное устройство подсоединения привязи от наземной станции к беспилотному летательному аппарату смонтировано за фюзеляжем беспилотного летательного аппарата и расположено по вертикали между днищем фюзеляжа и задними опорами шасси и снабжено поворотной многоканальной и многоконтактной муфтой с электроприводом, к которой с одной стороны подсоединены топливопровод, гидравлические трубопроводы, электрические кабели, информационный кабель, соединенные другими концами с топливным модулем, модулем приготовления и подачи рабочих жидкостей пестицидов, удобрений и других агрохимикатов, источником электроэнергии, блоком управления наземной станцией соответственно, с другой стороны муфта подсоединена через линию подачи топлива с расходным топливным баком, гидролиниями соединена с блоком распределения и подачи рабочей жидкости к модулю внесения, электрическим кабелем с силовой установкой, информационным кабелем с бортовым компьютером пилотажно-навигационной системы беспилотного летательного аппарата.
| US 20170043872 A1, 16.02.2017 | |||
| АЭРОСТАТНАЯ СИСТЕМА ДЛЯ ВНЕСЕНИЯ ЖИДКИХ И ТВЕРДЫХ ВЕЩЕСТВ НА ПОВЕРХНОСТЬ ЗЕМЛИ | 2000 |
|
RU2186003C2 |
| 0 |
|
SU154874A1 | |
| GB 892838 A, 28.03.1962 | |||
| CN 201415017 Y, 03.03.2010. | |||

