Предлагаемый способ относится к ледоведению и ледотехнике и служит для прогноза момента образования трещин или разлома ледяного поля в условиях сжатия ледяных полей и при воздействии волн зыби.
Такие данные могут быть использованы для обеспечения безопасности нахождения на льду людей, материальных ценностей, дрейфующих станций, ледовых аэродромов, ледовых переправ, а также при эксплуатации нефтедобывающих платформ в ледовых условиях и разгрузки судов на ледяной покров.
Известны способы и устройства мониторинга состояния дрейфующего ледяного поля (авт. свид. СССР №№1.788.487, 1.818.608, 1.840.741; патенты на полезные модели №№70.983, 107.371, 120.766; патенты РФ №№2.319.205, 2.362.971, 2.416.070, 2.427.011, 2.435.136, 2.444.760, 2.449.326, 2.453.865, 2.510.608, 2.526.222, 2.559.159, 2.559.311, 2.593.411, 2.621.276, 2.623.830; патенты США №№4.697.254, 5.790.474. Йоханнессен О.М. и др. Научные исследования в Арктике. Том 3. Дистанционное зондирование морских льдов на Северном морском пути: изучение и применение. СПб. Наука, 2007, с. 79-88, 235-238 и др.).
Из известных способов и устройств наиболее близким к предлагаемому является «Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби» (патент РФ №2.621.276, G01V 1/00, 2016), который и выбран в качестве прототипа.
Известный способ заключается в расстановке на ледяном поле или припае сейсмометров и наклономеров, которые фиксируют волновые поля и очаги их формирования в окружающем ледяном покрове, датчиков напряжений и деформометров для определения изменений напряженно-деформированного состояния ледяного поля, глобальной спутниковой системы позиционирования для временной синхронизации и фиксации изменений ориентации расстановки датчиков при дрейфе и поворотах ледяного поля.
Согласно известному способу на ледяном поле расставляются по четырехугольной схеме четыре полевые модульные станции, каждая из которых включает трехкомпонентный сейсмометр, двухкомпонентный наклономер, два однокомпонентных деформометра, два датчика напряжения и приемник сигналов глобальной спутниковой системы позиционирования. При этом размеры сторон четырехугольника выбираются в зависимости от размеров ледяного поля и решаемых задач.
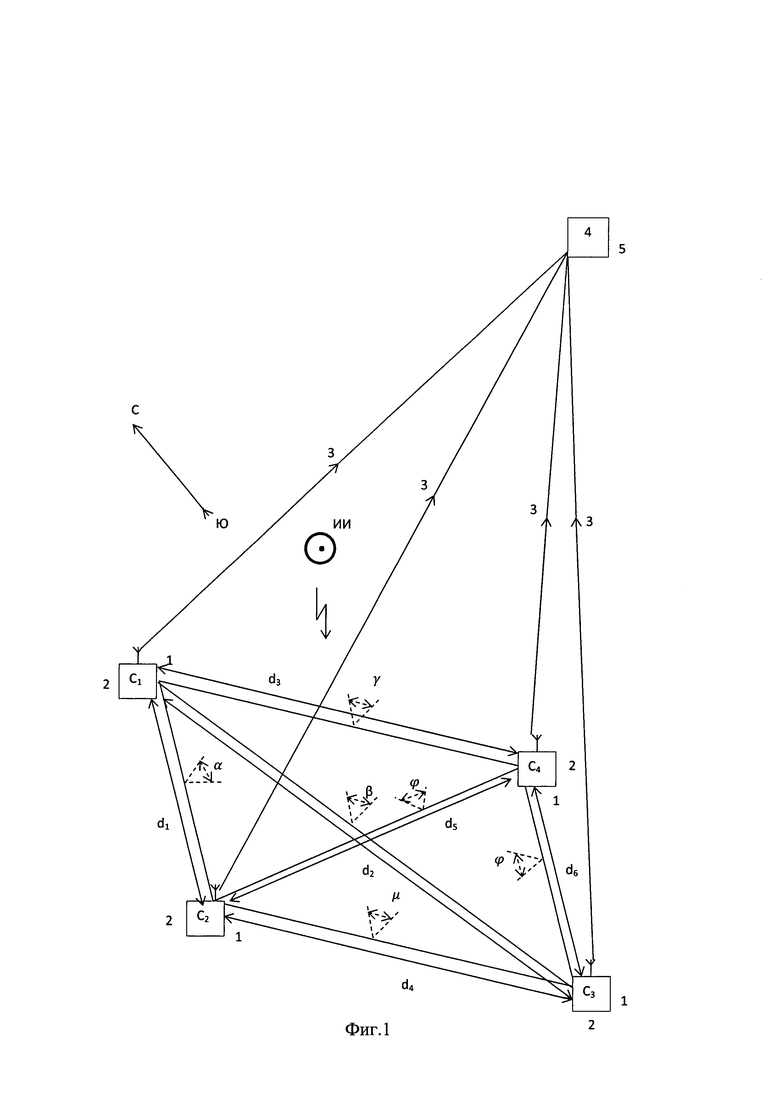
На дрейфующей льдине или припае по четырехугольной схеме в вершинах четырехугольника устанавливаются четыре модульные полевые станции 1 (С1, С2, С3, С4), которыми образованы шесть измерительных баз d1-d6, которые не участвуют в определении местоположения очагов трещинообразования и разрушения дрейфующего ледяного поля или припая.
Технической задачей изобретения является расширение функциональных возможностей известного способа и повышение точности определения местоположения очагов трещинообразования и разрушения дрейфующего ледяного поля или припая путем использования шести измерительных баз d1-d6.
Поставленная задача решается тем, что способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби, заключающийся в соответствии с ближайшим аналогом, в фиксации поля упругих волн сейсмическими станциями, состоящими каждая из сейсмометров, ориентированных по странам света, при этом на дрейфующем ледяном поле или припае фиксируют напряженно-деформированное состояние и одновременно поле упругих волн, а также положение ледяного поля в пространстве и во времени с помощью расстановки по четырехугольной схеме четырех полевых станций, каждая из которых состоит из трехкомпонентного сейсмометра, двухкомпонентного наклономера, двух деформометров, двух датчиков напряжений, ориентированных по странам света, и приемника глобальной спутниковой системы позиционирования, а данные поступают на базовую станцию сбора и обработки данных в режиме реального времени, располагаемую на судне или берегу, или на дрейфующем ледяном поле, отличается от ближайшего аналога тем, что сигналы, принимаемые полевыми модульными станциями от очага трещинообразования и разрушения передают по радиоканалам на базовую станцию сбора и обработки данных, где принимают указанные сигналы, выделяют гармонические напряжения и измеряют разности фаз между ними, формируя фазовые шкалы отсчета угловых координат очага трещинообразования и разрушения α, β, γ, μ, ϕ, ψ: точные, но неоднозначные, одновременно сигнал, принимаемый первой полевой модульной станцией C1, пропускают через первый, второй и третий блоки регулируемой задержки и перемножают с сигналами, принимаемыми второй С2, третьей С3 и четвертой С4 полевыми модульными станциями, выделяют низкочастотные напряжения, пропорциональные первой R1(τ), второй R2(τ) и третьей R3(τ) корреляционным функциям, где τ - текущая временная задержка, изменением временной задержки τ обеспечивают максимальные значения первой R1(τ), второй R2(τ) и третьей R3(τ) корреляционных функций, поддерживают их на максимальном уровне и фиксируют временные задержки τ=τз1, τ=τз2 и τ=τз3, соответствующие максимуму корреляционных функций, сигнал, принимаемый второй полевой модульной станцией С2, пропускают через четвертый и пятый блоки регулируемой задержки и перемножают с сигналами, принимаемыми третьей С3 и четвертой С4 полевыми модульными станциями, выделяют низкочастотные напряжения, пропорциональные четвертой R4(τ) и пятой R5(τ) корреляционным функциям, изменением временной задержки τ обеспечивают максимальное значение четвертой R4(τ) и пятой R5(τ) корреляционных функций, поддерживают их на максимальном уровне и фиксируют временные задержки τ=τз4 и τ=τз5, соответствующие максимуму корреляционных функций, сигнал, принимаемый третьей полевой модульной станцией С3, пропускают через шестой блок регулируемой задержки и перемножают с сигналом, принимаемым четвертой полевой модульной станцией С4, выделяют низкочастотное напряжение, пропорциональное шестой корреляционной функции R6(τ), изменением временной задержки τ обеспечивают максимальное значение шестой корреляционной функции R6(τ), поддерживают ее на максимальном уровне и фиксируют временную задержку τ=τз6, соответствующую максимуму шестой корреляционной функции R6(τ), по зарегистрированным временным задержкам формируют временные шкалы отсчета угловых координат α, β, γ, μ, ϕ и ψ очага трещинообразования и разрушения дрейфующего ледяного поля или припая: грубые, но однозначные, по измеренным угловым координатам точно и однозначно определяют местоположение очага трещинообразования и разрушения дрейфующего ледяного поля или припая.
Геометрическая расстановка четырех полевых модульных станций 1 (С1, С2, С3, С4) и базовой станции сбора и обработки данных 4 представлена на фиг. 1. Структурная схема базовой станции сбора и обработки данных 4 изображена на фиг. 2.
Четыре модульные станции 1 (С1, С2, С3, С4) расположены по четырехугольной схеме и образуют шесть измерительных баз d1, d2, d3, d4, d5 и d6 с подключенными датчиками 2 (Д1 - сейсмометры, Д2 - наклономеры, Д3 - деформометры, Д4 - датчики напряжения во льду, Д5 - приемники сигнала глобальной спутниковой системы позиционирования). По радиоканалам 3 полевые станции 1 связываются с базовой станцией сбора и обработки данных 4, расположенной на судне 5. Кроме того, в зависимости от условий проведения наблюдений, базовая станция сбора и обработки данных 4 может быть расположена на ледяном поле или берегу.
К каждой полевой модульной станции C1 (С2, С3, С4) по радиоканалу 3 последовательно подключены приемник 6 (7, 8, 9) и узкополосный фильтр 10 (11, 12, 13), который через фазометр 14 (15, 16, 17, 18, 19) подключен к компьютеру 20. К выходу первой модульной станции C1 через радиоканал 3 последовательно подключены блок 22.1 (22.2, 22.3) регулируемой задержки, перемножитель 23.1 (23.2, 23.3), второй вход которого соединен с выходом станции С2 (С3, С4), фильтр 24.1 (24.2, 24.3) нижних частот и экстремальный регулятор 25.1 (25.2, 25.3), выход которого соединен с вторым входом блока 22.1 (22.2, 22.3), второй выход которого через индикатор α 26 (индикатор β 27, индикатор γ 28 подключен к соответствующему входу компьютера 20. К выходу второй модульной станции С2 через радиоканал 3 последовательно подключены блок 22.4 (22.5) регулируемой задержки, перемножитель 23.4 (23.5), второй вход которого соединен с выходом станции С3 (С4), фильтр 24.4 (24.5) нижних частот и экстремальный регулятор 25.4 (25.5), выход которого соединен с вторым входом блока 22.4 (22.5) регулируемой задержки, второй выход которого через индикатор μ 29, индикатор ϕ 30 подключен к соответствующему входу компьютера 20. К выходу третьей модульной станции С3 через радиоканал 3 последовательно подключены блок 22.6 регулируемой задержки, перемножитель 23.6, второй вход которого соединен с выходом четвертой модульной станции С4, фильтр 24.6 нижних частот и экстремальный регулятор 25.6, выход которого соединен с вторым входом блока 22.6 регулируемой задержки, второй выход которого через индикатор 31 угла ψ подключен к соответствующему входу компьютера 20.
Блок 22.1 (22.2, 22.3, 22.4, 22.5, 22.6) регулируемой задержки, перемножитель 23.1 (23.2, 23.3, 23.4, 23.5, 23.6), фильтр 24.1 (24.2, 24.3, 24.4, 24.5, 24.6) нижних частот и экстремальный регулятор 25.1 (25.2, 25.3, 25.4, 25.5, 25.6) образуют первый 21.1 (второй 21.2, третий 21.3, четвертый 21.4, пятый 21.5, шестой 21.6) коррелятор.
Предлагаемый способ реализуют следующим образом.
На дрейфующей льдине или припае по четырехугольной схеме в вершинах четырехугольника устанавливаются четыре модульные полевые станции 1 (C1, С2, С3, С4). Для этого расчищаются четыре площадки, на которых ко льду примораживаются постаменты из досок и на них устанавливаются трехкомпонентные сейсмометры 2 (Д1) и двухкомпонентные наклономеры 2 (Д2). В поверхностный слой льда вмораживаются деформометры 2 (Д3) и датчики напряжения 2 (Д4), которые замораживаются в предварительно выбуренные скважины. Датчики ориентированы по сторонам света - север-юг и запад-восток, что обеспечивает возможность определения направлений и координат очагов трещинообразования и разрушения, а также скорость продвижения этих процессов к исследуемому ледяному полю. Кроме того, подключаются приемники сигналов глобальной спутниковой системы позиционирования 2 (Д5). Датчики при помощи проводов соединяются с модулями сбора и оцифровки данных и блоком аккумуляторных батарей. Рабочая настройка и проверка полевых станций осуществляется с помощью защищенного переносного персонального компьютера (ноутбука), который на фиг. 1 не указан. На судне 5 разворачивается базовая станция сбора и обработки данных 4, на которую по радиоканалам 3 поступаю данные в цифровом формате и записываются в базу данных на устройство постоянной памяти (сервер). Кроме того, осуществляется обработка поступающей информации на компьютере по определенному алгоритму в режиме реального времени с выводом на дисплей, что позволяет оперативно выделить предикторы разломов ледяного поля и дать заблаговременный прогноз опасного явления в определенном временном диапазоне. Базовая станция сбора и обработки данных 4, кроме судна 5, в зависимости от решаемых задач, может располагаться на ледяном поле или берегу. За временной синхронизацией между полевыми станциями и изменениями первоначальной ориентации расстановки датчиков при дрейфе и поворотах ледяного поля осуществляется постоянный контроль посредством приема сигнала ГЛОНАСС на приемники 2 (Д5).
Гармонические напряжения:
u1(t)=U1⋅Cos(ωct+ϕ1),
u2(t)=U2⋅Cos(ωct+ϕ2),
u3(t)=U3⋅Cos(ωct+ϕ3),
u4(t)=U4⋅Cos(ωct+ϕ4), 0≤t≤Tc,
выделяемые узкополосными фильтрами 10-13 на выходе приемников 6-9 поступают на два входа фазометров 14-19. Последние измеряют следующие разности фаз:

где λ - длина волны,
d1-d6 - измерительные базы;
α, β, γ, μ, ϕ, ψ - углы, определяющие местоположение источника излучения ИИ (очаг трещинообразования и разрушения), которые фиксируются компьютером 20. Так формируются фазовые шкалы отсчета угловых координат источника излучения (очага трещинообразования и разрушения) α, β, γ, μ, ϕ, ψ: точные, но неоднозначные.
Принимаемые радиосигналы одновременно поступают на два входа корреляторов 21.1, 21.2, 21.3, 21.4, 21.5 и 21.6. Получаемые на выходе фильтров 24.1, 24.2, 24.3, 24.4, 24.5 и 24.6 нижних частот корреляционные функции R1(τ), R2(τ), R3(τ), R4(τ), R5(τ) и R6(τ) имеют максимум при значении введенной регулируемой задержки:
τ1=t2-t1, τ2=t3-t1, τ3=t4-t1
τ4=t3-t2, τ5=t4-t2, τ6=t4-t3,
где t1, t2, t3, t4 - время прохождения сигналом расстояния от источника излучений ИИ до полевых станций С1, С2, С3 и С4 соответственно.
Максимальные значения корреляционных функций R1(τ), R2(τ), R3(τ), R4(τ), R5(τ) и R6(τ) поддерживаются с помощью экстремальных регуляторов 25.1, 25.2, 25.3, 25.4, 25.5 и 25.6, воздействующих на управляющие входы блоков 22.1, 22.2, 22.3, 22.4, 22.5 и 22.6 регулируемой задержки.
Шкалы блоков 22.1÷22.6 регулируемой задержки (указатели углов) проградуированы непосредственно в значениях угловых координат источника излучения:
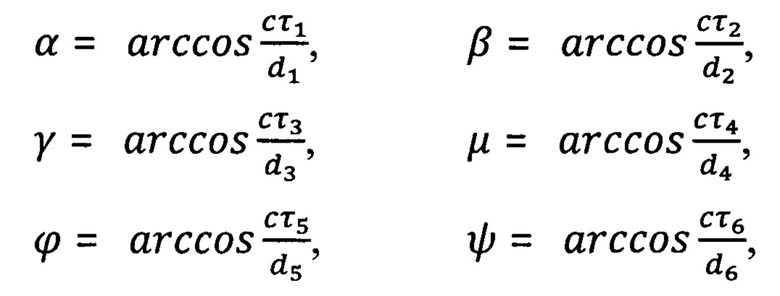
где с - скорость распространения волн.
Значения угловых координат α, β, γ, μ, ϕ и ψ фиксируются соответствующими индикаторами 26, 27, 28, 29, 30 и 31 и поступают в компьютер 20.
Так формируются временные шкалы отсчета угловых координат источника излучения (очага трещинообразования и разрушения) α, β, γ, μ, ϕ и ψ: грубые, но однозначные.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение точности определения местоположения источника излучения (очага трещинообразования и разрушения) дрейфующего ледяного поля или припая. Это достигается за счет использования шести измерительных баз d1-d6.
Тем самым функциональные возможности известного способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби | 2016 |
|
RU2621276C1 |
| Универсальная модульно-блочная система мониторинга состояния ледяного покрова | 2018 |
|
RU2683806C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| Способ определения в натурных условиях деформационных и прочностных характеристик ровного ледяного покрова при изгибе | 2015 |
|
RU2614922C1 |
| Способ определения напряжённо-деформированного состояния ледяного поля при движении ледокола | 2022 |
|
RU2797972C1 |
| Стенд для имитации колебательных процессов ледяного покрова | 2020 |
|
RU2759421C1 |
| Дрейфующая буйковая гидроакустическая станция для определения предвестников сильных землетрясений и цунами на акваториях с ледовым покровом | 2021 |
|
RU2770130C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ И ПАРАМЕТРОВ МЕХАНИЗМОВ ИХ ОЧАГОВ В УСЛОВИЯХ СИЛЬНЫХ СЕЙСМИЧЕСКИХ ПОМЕХ (ВАРИАНТЫ) | 2012 |
|
RU2494418C1 |
| Стенд для имитации горизонтальных ударных и колебательных движений ледяного покрова | 2022 |
|
RU2797939C1 |
| СТЕНД ДЛЯ ИМИТАЦИИ НИЗКОЧАСТОТНЫХ ГОРИЗОНТАЛЬНЫХ КОЛЕБАНИЙ ЛЬДА | 2021 |
|
RU2773439C1 |

Изобретение относится к ледоведению и ледотехнике и служит для прогноза момента образования трещин или разлома ледяного поля. Система, реализующая способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби, содержит четыре модульные полевые станции 1 (С1, С2, С3, С4), датчики 2 (Д1 - сейсмометры, Д2 - наклономеры, Д3 - деформометры, Д4 - датчики напряжения во льду, Д5 - приемники сигнала глобальной спутниковой системы позиционирования), радиоканалы 3, базовую станцию сбора и обработки данных 4, расположенную на судне 5, источник излучения ИИ (очаг трещинообразования и разрушения). Базовая станция 4 сбора и обработки данных содержит приемники 6-9, узкополосные фильтры 10-13, фазометры 14-19, компьютер 20, корреляторы 21.1-21.6, блоки 22.1-22.6 регулируемой задержки, перемножители 23.1-23.6, фильтры 24.1-24.6 нижних частот, экстремальные регуляторы 25.1-25.6, индикаторы 26-31 углов. Технический результат заключается в обеспечении возможности расширения функциональных возможностей способа и повышения точности определения местоположения очагов трещинообразования и разрушения. 2 ил.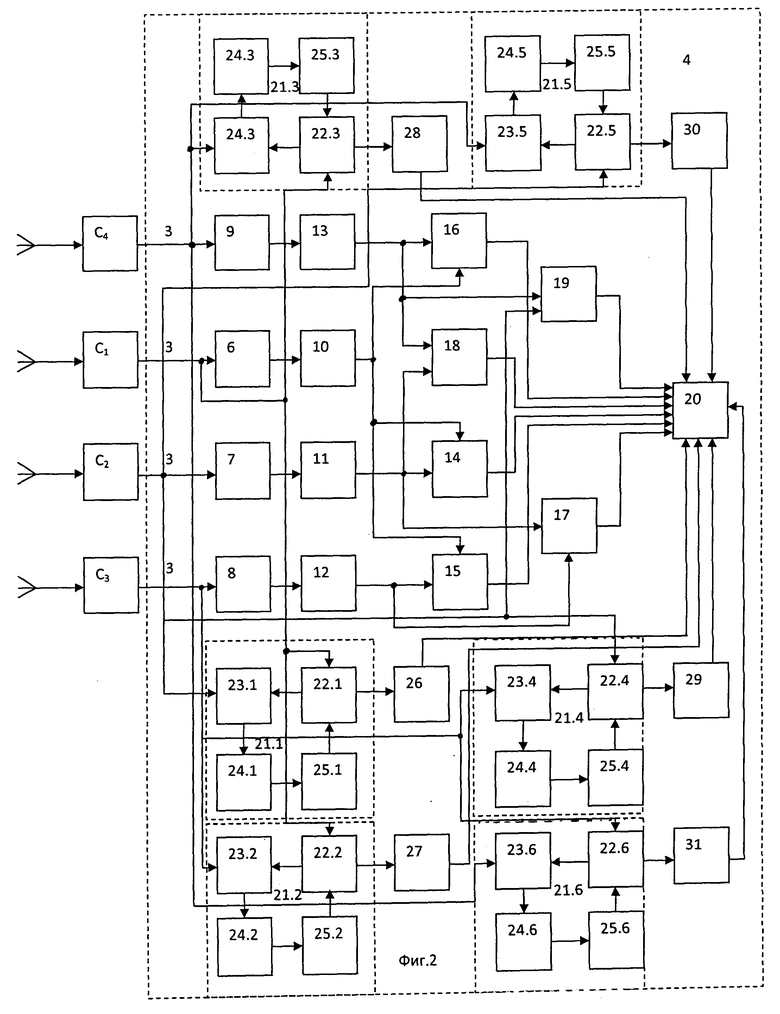
Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби, заключающийся в фиксации поля упругих волн сейсмическими станциями, состоящими каждая из сейсмометров, ориентированными по странам света, при этом на дрейфующем ледяном поле или припае фиксируют напряженно-деформированное состояние и одновременно поле упругих волн, а также положение ледяного поля в пространстве и во времени с помощью расстановки по четырехугольной схеме четырех полевых станций, каждая из которых состоит из трехкомпонентного сейсмометра, двухкомпонентного наклономера, двух деформометров, двух датчиков напряжений, ориентированных по странам света, и приемника глобальной спутниковой системы позиционирования, а данные поступают на базовую станцию сбора и обработки данных в режиме реального времени, располагаемую на судне или берегу, или на дрейфующем ледяном поле, отличающийся тем, что сигналы, принимаемые полевыми станциями от очага трещинообразования и разрушения, передают по радиоканалам на базовую станцию сбора и обработки данных, где принимают указанные сигналы, выделяют гармонические напряжения и измеряют разности фаз между ними, формируя фазовые шкалы отсчета угловых координат очага трещинообразования и разрушения α, β, γ, μ, ϕ, ψ: точные, но неоднозначные, одновременно сигнал, принимаемый первой полевой станцией C1, пропускают через первый, второй и третий блоки регулируемой задержки и перемножают с сигналами, принимаемыми второй С2, третьей С3 и четвертой С4 полевыми станциями соответственно, выделяют низкочастотные напряжения, пропорциональные первой R1(τ), второй R2(τ) и третьей R3(τ) корреляционным функциям, где τ - текущая временная задержка, изменением временной задержки τ обеспечивают максимальные значения первой R1(τ), второй R2(τ) и третьей R3(τ) корреляционных функций, поддерживают их на максимальном уровне и фиксируют временные задержки τ=τз1, τ=τз2 и τ=τз3, соответствующие максимуму корреляционных функций, сигнал, принимаемый второй полевой станцией С2, пропускают через четвертый и пятый блоки регулируемой задержки и перемножают с сигналами, принимаемыми третьей С3 и четвертой С4 полевыми станциями соответственно, выделяют низкочастотные напряжения, пропорциональные четвертой R4(τ) и пятой R5(τ) корреляционным функциям, изменением временной задержки τ обеспечивают максимальные значения четвертой R4(τ) и пятой R5(τ) корреляционных функций, поддерживают их на максимальном уровне и фиксируют временные задержки τ=τз4 и τ=τз5, соответствующие максимуму корреляционных функций, сигнал, принимаемый третьей С3 полевой станцией, пропускают через шестой блок регулируемой задержки и перемножают с сигналом, принимаемым четвертой С4 полевой станцией, выделяют низкочастотное напряжение, пропорциональное шестой R6(τ) корреляционной функции, изменением временной задержки τ обеспечивают максимальное значение шестой R6(τ) корреляционной функции, поддерживают ее на максимальном уровне и фиксируют временную задержку τ=τз6, соответствующую максимуму корреляционной функции, по зарегистрированным временным задержкам формируют временные шкалы отсчета угловых координат очага трещинообразования и разрушения α, β, γ, μ, ϕ и ψ: грубые, но однозначные, по измеренным угловым координатам точно и однозначно определяют местоположение очага трещинообразования и разрушения.
| Способ мониторинга состояния дрейфующего ледяного поля или припая и прогноза его разлома при сжатии льдов и воздействии волн зыби | 2016 |
|
RU2621276C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| US 9933536 B2, 03.04.2018 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |

