Настоящее изобретение относится к устройству и способу адаптивного управления тормозной системой рельсового транспортного средства с помощью функции противоюзной защиты, предотвращающей блокирование одного из колес рельсового транспортного средства при неблагоприятных условиях адгезии контакта колеса с рельсом.
Системы противоюзной защиты рельсовых транспортных средств выполняют функцию, аналогичную функции антиблокировочной системы (АБС) автомобиля. При торможении рельсового транспортного средства из-за изменения условий силового зацепления в контактной поверхности между колесом и рельсом возможна резкая блокировка оси, что в случае удлиненного пути торможения приводит к образованию в ободе колеса плоскости, нарушающей окружность колеса. Важнейшей задачей системы противоюзной защиты является предотвращение блокировки оси при торможении, например, путем соответствующего автоматического отсасывания или закачивания воздуха в тормозной пневмоцилиндр.
Для осуществления торможения машинист подключает тормозное управляющее давление, устанавливающее через короткое время соответствующее тормозное давление в тормозных пневмоцилиндрах коленных пар. Созданный таким образом тормозной момент замедляет колесную пару, за счет чего между опорными поверхностями и рельсами возникает пробуксовка. Пробуксовку при торможении рассчитывают по формуле:
s=(v-Rω)/v,
где s – пробуксовка, v - скорость транспортного средства, ω – скорость оси, а R – номинальный радиус. Замедляющая рельсовое транспортное средство сила трения – это продукт зависящей от пробуксовки нагрузки силового зацепления и силы в контактной точке колеса и рельса. С увеличением пробуксовки нагрузка силового зацепления резко возрастает и плавно падает после достижения максимального значения. При этом максимальное значение силового зацепления зависит от различных факторов воздействия, например от погодных условий, и от состояния рельса. На гладком или покрытом опавшей листвой рельсе оно особенно низкое. При движении без пробуксовки нагрузка силового зацепления отсутствует.
У рельсового транспортного средства необходимая сила торможения или тяговая сила пропорциональна, таким образом, фактическому силовому зацеплению между колесом и рельсом. Максимально возможное силовое зацепление с соответствующей пробуксовкой колеса зависит при этом от множества параметров. В существующем уровне техники, как это описано, например, в DE 10 2006 057 813 A1, различают, главным образом, два диапазона пробуксовки. С одной стороны, условия силового зацепления с высокой пробуксовкой колеса согласно испытаниям стандарта UIC 541-05 международного железнодорожного союза (Union internationale des chemins de fer (UIC)) при наличии промежуточных слоях влаги. С другой стороны, условия силового зацепления с низкой пробуксовкой колеса при наличии промежуточного слоя из опавшей листвы или масляных субстанций.
Таким образом, система противоюзной защиты или антипробуксовочная система должна регулировать необходимую пробуксовку колеса для максимального увеличения силового зацепления. Обычные системы противоюзной защиты по стандарту UIC541-05 регулируют обычную пробуксовку колеса в диапазоне по стандарту UIC541-05. Этот диапазон пробуксовки определен согласно стандарту условиями испытаний силового зацепления с водно-мыльной смесью. В указанном источнике DE 10 2006 057 813 A1 на основе результатов ходовых и эксплуатационных испытаний различают два разных диапазона регулировки – диапазон нормальной пробуксовки (<30%) и диапазон низкой пробуксовки (<5%). Переключение между обоими диапазонами осуществляют в зависимости от времени года (осенью) на основе недостаточной эффективности замедления при высокой пробуксовке или на основе оценки замедления колесных пар.
Другие системы противоюзной защиты основаны на принципе моделирования, при котором идентифицируют характеристики фактического промежуточного слоя в точке контакта колеса с рельсом и рассчитывают необходимую для максимального силового зацепления оптимальную пробуксовку на основе этих характеристик. Предложена также регулировка пробуксовки для максимального силового зацепления на основе измерения соотношения силового замыкания и пробуксовки на отдельных осях. Другой принцип основан на отсутствии фактической регулировки пробуксовки и на применении вместо этого установки в 50% осей диапазона стандартной пробуксовки (согласно UIC 541-05), а в оставшихся 50% - альтернативного диапазона низкой пробуксовки.
Обычные системы противоюзной защиты в существующем уровне техники оптимированы, главным образом, к типу силового зацепления. Регулировку в соответствии с разницей в условиях не осуществляют. Если для фактического силового зацепления необходима низкая или очень низкая пробуксовка, то оси работают в не оптимальном режиме пробуксовки колес. При регулировке диапазона пробуксовки необходимо учитывать специфические параметры транспортного средства (например, ускорение, массу, мощность и т.д.). Состояние после прекращения действия слабого замедления (низкая пробуксовка) более подробно не раскрыто. Одиночные кратковременные отклонения в ускорении колесных пар вызывают ошибочную оценку необходимого диапазона пробуксовки. Как правило, чтобы определить взаимосвязи между силовым зацеплением и пробуксовкой для определения диапазона пробуксовки необходимо множество параметров и/или характеристик с нормативно-справочной информацией. В системах с определением соответствующей пробуксовки всей системы на основе ответного сигнала одной отдельной оси предпочтительно наличие аналогичного типа силового зацепления на всех осях.
Указанный последним неадаптивный принцип является компромиссом. Он обладает преимуществом отсутствия необходимости знания параметров рельсового транспортного средства и обеспечивает заданное постоянное распределение пробуксовки. Это исключает возможность ошибочной адаптации. Однако вследствие этого только 50% осей работают в правильном диапазоне пробуксовки. Таким образом, фактическая сила торможения системы выше, чем в системе с ошибочной адаптацией, но ниже, чем в системе с правильной адаптацией.
Поэтому задача данного изобретения – создать систему противоюзной защиты с улучшенными показателями эффективности адаптации.
Согласно изобретению эту задачу решают на основе отличительной части независимых пунктов приложенной формулы изобретения. Предпочтительные варианты осуществления изобретения и его модернизации раскрыты в зависимых пунктах формулы.
Для решения задачи предложены устройство и способ адаптивного управления тормозной системой рельсового транспортного средства, причем тормозной системой управляют согласно заданному первому и второму диапазону параметров пробуксовки, причем первый диапазон параметров пробуксовки является макродиапазоном пробуксовки с увеличенным допустимым диапазоном пробуксовки, а второй диапазон парамтров пробуксовки является микродиапазоном пробуксовки с заниженным допустимым диапазоном пробуксовки с определением максимальной для микродиапазона пробуксовки силы торможения и обеспеченной в фактическом диапазоне пробуксовки средней силы торможения. Переход с макродиапазона на микродиапазон пробуксовки инициируют, если сравнение заданной средней силы торможения в макродиапазоне пробуксовки с максимально возможной силой торможения в микродиапазоне пробуксовки свидетельствует о наличии недостаточного воздействии пробуксовки в макродиапазоне. В альтернативном варианте переход с микродиапазона в макродиапазон пробуксовки инициируют, если сравнение заданной средней силы торможения в макродиапазоне пробуксовки с максимально возможной силой торможения в микродиапазоне пробуксовки свидетельствует о наличии достаточного воздействии пробуксовки в макродиапазоне.
При осуществлении управления противоюзной защитой при помощи компьютерного процессора с программным управлением способ по формуле данного изобретения реализуют в виде компьютерной программы, причем компьютерная программа включает средства кодирования осуществления этапов согласно пункту 9 формулы изобретения, если программу выполняют на этом компьютере.
Предпочтительно в описанном решении предложена замкнутая система управления противоюзной защитой, обеспечивающая автоматический переход с микродиапазона в макродиапазон пробуксовки и наоборот. Это обеспечивает возможность непрерывного адаптирования пробуксовки колеса к фактическим условиям силового зацепления. Вследствие усреднения заданной силы торможения кратковременные статичные колебания силового зацепления не влияют на оценку диапазонов пробуксовки. Применение усредненных и отфильтрованных величин обеспечивает в процессе управления учет средних («размытых») условий силового зацепления и их изменений.
Таким образом, отпадает необходимость затратной корреляции силового зацепления и пробуксовки для задания соответствующих диапазонов регулировки. Все решения по заданию диапазонов пробуксовки основаны на сравнении средних сил торможения и отрезков трения. Поэтому отпадает необходимость знания фактических на данный момент абсолютных сил. Достаточно пропорционального силе торможения сигнала.
Принципиально нет необходимости в знании параметров транспортного средства или компонентов тормозной системы. При применении для различения сил сигналов, пропорциональных силе торможения, предпочтительно их соответствующее шкалирование. В пневматической тормозной системе усредненное давление торможения используют, например, в качестве меры силы торможения.
Согласно первому предпочтительному варианту модернизации изобретения устройство выполнено для инициализации сравнения средствами сравнения со срабатыванием при достижении заданного отрезка трения. Это обеспечивает осуществление сравнения характеристик макродиапазона пробуксовки с характеристиками микродиапазона только после достижения заданного отрезка трения, что обеспечивает возможность получения информативного результата. При этом отрезок трения определяют в качестве, например, производного из времени и разницы скоростей между колесом и рельсовым транспортным средством.
Согласно второму предпочтительному варианту модернизации изобретения устройство выполнено таким образом, чтобы при переходе в микродиапазон пробуксовки оставлять одну ось транспортного средства в качестве испытуемой оси на тестовый период в макродиапазоне пробуксовки. За счет этого характеристики макродиапазона пробуксовки и после перехода в микродиапазон можно непрерывно параллельно фиксировать, чтобы обеспечить и в микродиапазоне пробуксовки возможность сравнения характеристик макродиапазона с характеристиками микродиапазона пробуксовки. При этом указанный тестовый период можно закончить предпочтительно после достижения заданного привнесенного отрезка трения или после окончания максимального времени теста, чтобы получить информативные показатели средней силы торможения на испытуемой оси, работающей в макродиапазоне пробуксовки. Тестовый период может быть также и подлен, чтобы оставить оси и после периода макродиапазона пробуксовки в состоянии регулировки макродиапазона для сбора данных о макропробуксовывающих осях.
Согласно третьему предпочтительному варианту модернизации изобретения устройство выполнено таким образом, чтобы управлять средствами регулировки диапазонов пробуксовки для завершения макродиапазона пробуксовки испытуемой оси, если средняя сила торможения на испытуемой оси меньше максимально возможной силы торможения в микродиапазоне пробуксовки. Таким образом, испытуемая ось работает только в макродиапазоне пробуксовки до тех пор, пока ее средняя сила торможения выше максимально возможной силы торможения в микродиапазоне пробуксовки.
Согласно четвертому предпочтительному варианту модернизации изобретения устройство включает дополнительные средства сравнения средней силы торможения осей, работающих в микродиапазоне пробуксовки, причем устройство инициирует средства регулировки диапазона пробуксовки на работу всех осей тормозной системы в макродиапазоне пробуксовки, если средняя сила торможения осей, работающих в макродиапазоне пробуксовки, превышает среднюю силу торможения осей, работающих в микродиапазоне пробуксовки. При этом среднюю силу торможения осей в диапазоне пробуксовки определяют, например, путем суммирования средних сил торможения соответствующих осей диапазона пробуксовки. Согласно предложенному управлениию противоюзной защитой переход из макродиапазона пробуксовки осуществляют только после наличия потенциала всей тормозной системы в микродиапазоне пробуксовки, улучшенного по сравнению с фактическими характеристиками макродиапазона пробуксовки. При этом среднюю достижимую силу торможения получают, в частности, в микродиапазоне пробуксовки из фактического силового зацепления с силовым потенциалом и соответствующей регулировкой микродиапазона пробуксовки. В случае низкой степени эффективности регулировки микродиапазона пробуксовки снова осуществляют переход в макродиапазон.
Согласно пятому предпочтительному варианту модернизации изобретения средства задания максимальной силы торможения выполнены, например, для определения максимально возможной в микродиапазоне силы торможения при полном переходе контакта колеса с рельсом в фазу скольжения за счет корреляции с необходимой для этого силой. Другие преимущества, признаки и варианты применения данного изобретения раскрыты в нижеследующем описании с привлечением приложенных чертежей, на которых представлено следующее:
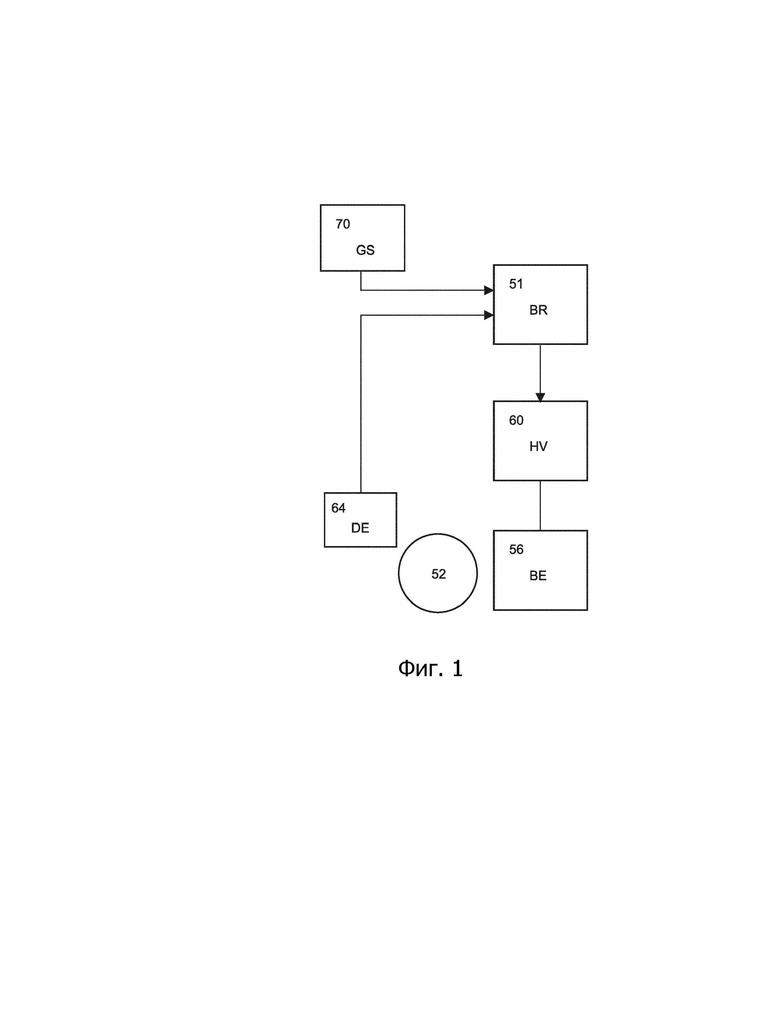
фиг. 1 – принципиальная блок-схема пневматической тормозной системы с противоюзной защитой, в которой может быть применено данное изобретение;
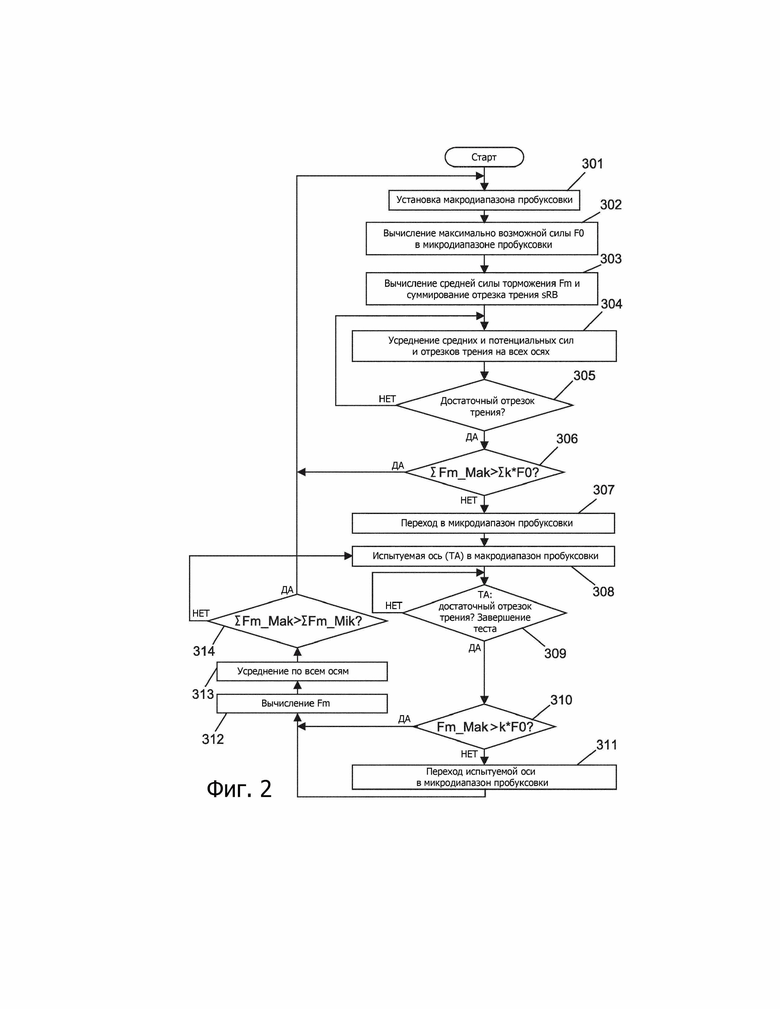
фиг. 2 – структурная диаграмма управления противоюзной защитой по первому варианту осуществления изобретения;
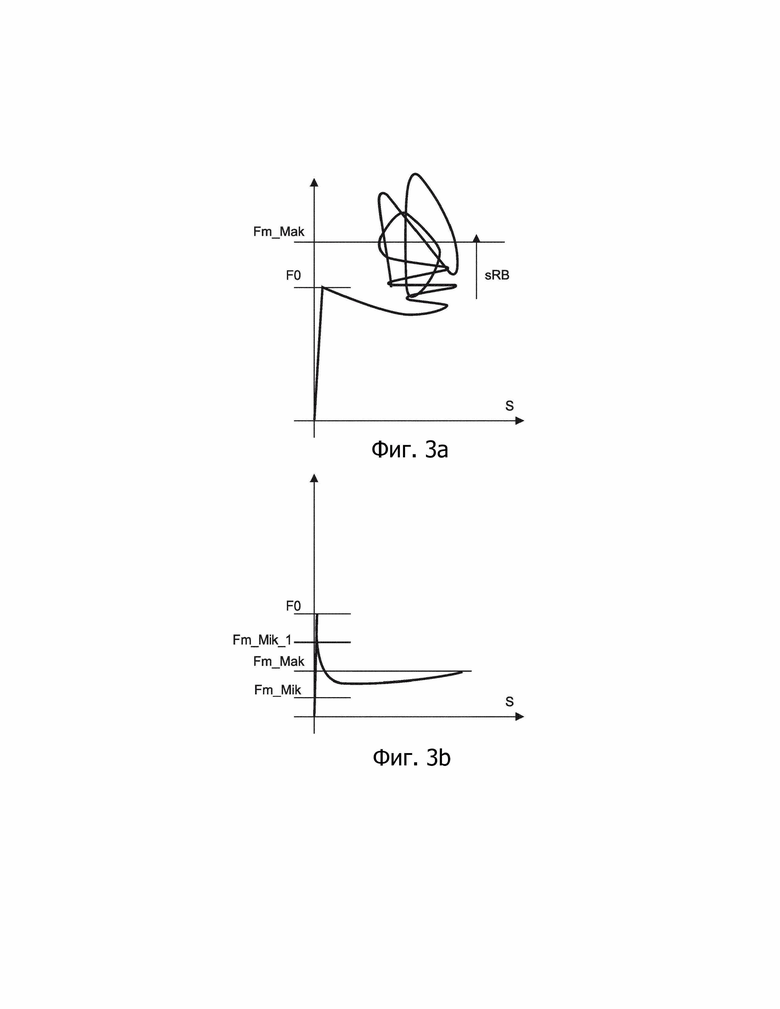
фиг. 3а-3b – пример качественных изменений кривой нагрузка силового зацепления/пробуксовка при разных типах силового зацепления с применением предложенного управления противоюзной защитой;
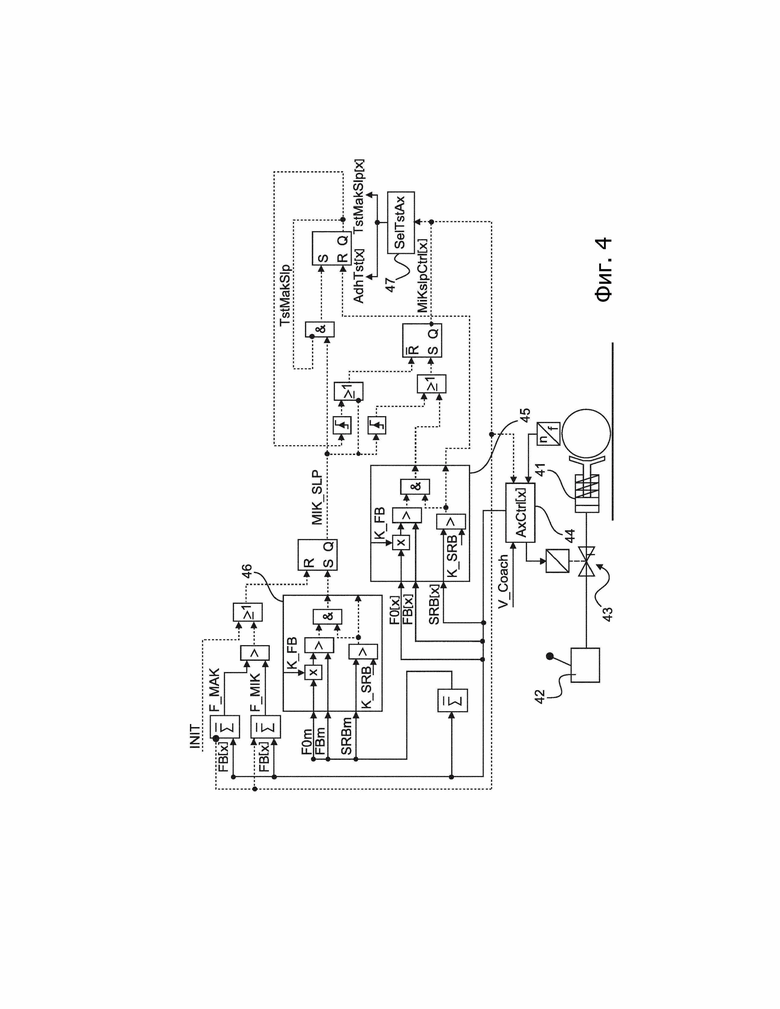
фиг. 4 – функциональная блок-схема управления противоюзной защитой с адаптивной функцией по второму варианту осуществления изобретения.
Далее варианты осуществления данного изобретения описаны на примере управления противоюзной защитой пневматической тормозной системы рельсового транспортного средства.
На фиг. 1 показана схема тормозной системы с блоком (BR) 51 регулирования тормозного нажатия, выполненным с возможностью реализации управления программируемой или аппаратной противоюзной защитой. Тормозная система предназначена для оттормаживания многочисленных колес рельсового транспортного средства, например показанного на фиг. 1 колеса 52. С этой цель для указанного в примере колеса 52, а также для всех других, не показанных здесь колес предназначен блок (ВЕ) 56 тормозов тормозной системы. Главный блок (HV) 60 управления клапанами пневматической тормозной системы соединен с блоком 51 регулирования тормозного нажатия. Блок 51 регулирования тормозного нажатия предназначен для подачи команд управления главному блоку 60 управления клапанами на создание общего тормозного давления для блока 56 тормозов и блоков тормозов других колес. Блок 56 тормозов включает также блок тормозных клапанов с подачей команд от блока 51 регулирования тормозного нажатия и с возможностью модифицирования по командам блока 51 регулирования тормозного нажатия тормозного давления, подаваемого главным блоком 60 управления клапанами. Модифицированное блоком тормозных клапанов тормозное давление поступает, например, в выполненный в качестве движителя пневмоцилиндр блока 56 тормозов для привода блока фрикционных тормозов (в этом варианте не показанный в деталях колодочный тормоз). Это обеспечивает возможность подачи команд блоком 51 регулирования тормозного нажатия на создания необходимого тормозного давления для оттормаживания колеса 52. Датчик (DS) 64 оборотов колеса предназначен для измерения количества оборотов колеса 52 и для подачи на блок 51 регулирования тормозного нажатия необходимого сигнала через соответствующую проводку. В рабочем режиме блок 51 регулирования тормозного нажатия соответственно фиксирует посредством датчика 64 оборотов колеса количество оборотов колеса 52. Блок 51 регулирования тормозного нажатия фиксирует также данные о скорости движения рельсового транспортного средства, передаваемые по проводке дополнительно устанавливаемым датчиком 70 скорости. На этой основе блок 51 регулирования тормозного нажатия вычисляет фактическую пробуксовку колеса 52.
Исходя из известной фактической пробуксовки колеса 52, блок регулирования тормозного нажатия подает команды на блок 56 тормозов, чтобы отрегулировать для колеса 52, по меньшей мере, на начальном этапе торможения необходимый заданный диапазон пробуксовки. Для регулировки используют данные датчика 64 оборотов. Блок 51 регулирования тормозного нажатия соединен также с блоком датчиков тормозного давления (не показан), фиксирующим подаваемое на главный блок 60 управления клапанами основное тормозное давление и/или фактическое тормозное давление в блоке 56 тормозов и передающим эти данные на блок 51 регулирования тормозного нажатия. Блок 51 регулирования тормозного нажатия выполнен также с возможностью вычисления скорости движения на основе данных количества оборотов нескольких колес.
На фиг. 2 показана структурная диаграмма адаптивного управления противоюзной защитой по первому варианту осуществления изобретения, реализуемого, например, в указанном блоке 51 регулирования тормозного нажатия по фиг. 1. Как указано выше, адаптивное регулирование противоюзной защиты выполнено с программным или аппаратным управлением.
После начала процесса сначала устанавливают этап 301 регулировки в макродиапазоне пробуксовки. Затем на этапе 302 вычисляют максимально возможную в микродиапазоне пробуксовки силу торможения при полном переходе точки контакта колесо/рельс в оз, например, путем корреляции с необходимой для этого силой и заносят в память в качестве потенциально возможной силы F0 микродиапазона пробуксовки. На следующем этапе 303 среднюю силу торможения вычисляют фильтрованием и/или усреднием силы, реализованной противоюзной защитой или управлением тягой. В ходе дальнейшего управления средняя сила торможения является результатом регулировки макродиапазона пробуксовки (обозначено "Fm_Mak") или регулировки микродиапазона пробуксовки (обозначено "Fm_Mik"). При этом средняя сила торможения Fm_Mik в микродиапазоне пробуксовки не обязательно соответствует потенциально возможной силе F0 в микродиапазоне пробуксовки. Она вытекает из взаимодействия фактического силового зацепления и характеристик функции регулирования микропробуксовки и одновременно обладает, тем самым, КПД регулировки микродиапазона пробуксовки.
Далее на этапе 303 приплюсовывают и отрезок трения sRB или производное из разницы скоростей между колесной парой и транспортным средством и временем. Конечно, отрезок трения можно высчитывать и другим образом как суммированную в зависимости от времени пробуксовку.
Специфические для осей или колес средние силы Fm_Mik или Fm_Mak и потенциальные силы F0, а также наложенные отрезки трения затем еще раз рассчитывают на этапе 304. Таким образом, решение о продолжении макродиапазона пробуксовки основано на общем состоянии системы (обозначено символом "Σ"), а не на характеристиках отдельных осей или колес.
Затем на этапе 305 устанавливают, был ли наложен необходимый общий отрезок трения ΣsRB системы, необходимый для надежности решения о продлении макродиапазона пробуксовки. Если это не произошло, то процесс возвращают на этап 304 с продолжением приплюсовывания отрезка трения. Если на этапе 305 устанавливают наличие достаточного общего отрезка трения ΣsRB системы, то на этапе 306 осуществляют оценку степени соответствования регулировки макродиапазона пробуксовки силовому зацеплению. Это осуществляют путем сравнения средней системной силы торможения ΣFm_Mak и потенциально возможной в микродиапазоне пробуксовки системной силы ΣkFO с коэффициентом k (например, 0,5<k<1 ,5 или т.п.).
При достаточном эффекте макропробуксовки, т.е. если средняя системная сила торможения ΣFm_Мak в макродиапазоне пробуксовки больше потенциально возможной и выявленной в микродиапазоне пробуксовки системной силы ΣkFO, процесс возвращают обратно на этап 301 (альтернативно этапу 302) и продолжают работу в макродиапазоне пробуксовки.
В другом случае, при не достаточном эффекте макропробуксовки, т.е. если средняя системная сила торможения ΣFm_Мak в макродиапазоне пробуксовки не превышает потенциально возможную и выявленную в микродиапазоне пробуксовки системную силу ΣkFO, на этапе 307 осуществляют переход системы в микродиапазон пробуксовки. При этом всеми осями управляют в микродиапазоне пробуксовки. Как исключение из этого, опционно на этапе 308, по меньшей мере, одну из осей в качестве испытуемой оси (ТА) постоянно оставляют во время тестовой фазы с регулированием в состоянии макропробуксовки. На заключительном этапе 309 приплюсовывают отрезок трения испытуемой оси и проверяют наложение достаточного отрезка трения sRB испытуемой оси в тестовой фазе. Если это не произошло, то этап 309 повторяют до тех пор, пока не будет наложен достаточный отрезок трения. После фиксирования наложения достаточного отрезка трения тестовую фазу испытуемой оси завершают, и процесс переходит на этап 310.
На этапе 310 путем сравнения промежуточно зафиксированной средней для испытуемой оси силы торможения с потенциально возможной в микродиапазоне пробуксовки и измеренной силы kF0 выявляют достаточность эффекта силового зацепления испытуемой оси в макродиапазоне пробуксовки. Если это установлено, то процесс переходит на этап 311. При недостаточности эффекта силового зацепления в макродиапазоне пробуксовки, т.е. если средняя сила торможения Fm_Mak тестовой оси в макродиапазоне пробуксовки больше потенциально возможной в микродиапазоне силы F0, то начинают этап 311 процесса с переводом испытуемой оси в диапазон микропробуксовки.
После завершения теста на макропробуксовку на этапе 309 на основе соответствующих критериев для оси обеспечена возможность автоматического продолжения макродиапазона пробуксовки или возвращения в микродиапазон пробуксовки. Ось для последующего теста на макропробуксовку выбирают из «пула» осей, оставшихся с регулировкой в микропробуксовке. Таким образом, не смотря на микропробуксовочное состояние системы, одна или несколько осей остаются в режиме макропробуксовки.
Затем процесс переходит на этап 312, на котором среднюю силу торможения определяют путем фильтрации и/или усреднения силы, реализованной противоюзной защитой или регулированием тяги. Средние силы Fm_Mik или Fm_Mak на отдельных осях или колесах еще раз усредняют по всей системе на этапе 313. В заключении на этапе 314 фактическую среднюю системную силу торможения осей в микродиапазоне пробуксовки сравнивают с такой же силой осей в макродиапазоне пробуксовки. Если средняя величина сил торможения осей в макродиапазоне пробуксовки превосходит такие же силы осей в микродиапазоне пробуксовки, процесс возвращают назад на этап 301, а система снова переходит в макродиапазон пробуксовки. В противном случае систему оставляют в микродиапазоне пробуксовки, а процесс возвращают назад на этап 308 с переводом новой оси в макродиапазон пробуксовки.
На фиг. 3а и 3b показаны примеры качественных изменений кривой нагрузка силового зацепления/пробуксовка для разных типов силового зацепления с применением предложенного управления противоюзной защитой, причем горизонтальная ось соответствует пробуксовке sБ а вертикальная ось соответствует нагрузке силового зацепления.
На фиг. 3а управление противоюзной защитой начинают в макродиапазоне пробуксовки. С увеличением пробуксовки s нагрузка силового зацепления резко возрастает и плавно падает после достижения, по меньшей мере, локального максимального значения (соответствующего максимально возможной в микродиапазоне пробуксовки силе F0). С дальнейшим увеличением пробуксовки тормозная система становится нестабильной и возрастает фактор регулирования противоюзной защитой. В зависимости от условий трения в точке контакта колесо/рельс происходит постоянное изменение соотношение пробуксовки и силового зацепления под воздействием регулирования противоюзной защиты или тяги. Временной ход этих изменений показан в верхней части Фигуры 3а непрерывной линией. Стрелкой на фиг. 3а обозначено возрастание отрезка трения sRB, вычисляемого приплюсовыванием производного из разницы скоростей между колесной парой и транспортным средством и времени.
На фиг. 3а по вертикальной оси обозначена также средняя сила торможения Fm_Mak в макродиапазоне пробуксовки, полученная путем фильтрации и усреднения изменений по времени тормозных сил противоюзной защиты и регулировки тяги. Эту среднюю силу торможения используют, как указано выше, для принятия решения о смене между макродиапазоном и микродиапазоном пробуксовки. В примере сценария силового зацепления по Фигуре 3а средняя сила торможения в макродиапазоне пробуксовки превосходит максимально возможную силу F0 в микродиапазоне. Таким образом, управление противоюзной защитой продолжает работу в макродиапазоне пробуксовки.
На фиг. 3b показан пример другого сценария силового зацепления. Регулирование противоюзной защиты начинают опять в микродиапазоне пробуксовки. Здесь также нагрузка силового зацепления резко возрастает с увеличением пробуксовки s и падает после достижения максимально возможной силы F0. В этом случае нагрузка силового зацепления меньше из-за низкого трения в точке контакта колесо/рельс. Значительного роста средней силы торможения Fm_Mak в макродиапазоне пробуксовки за счет наложенного отрезка трения в этом случае не происходит. Так как Fm_Mak значительно ниже возможной в микродиапазоне пробуксовки силы F0, регулировка противоюзной защиты переводит систему сначала в микродиапазон пробуксовки.
В первом случае средняя сила торможения Fm_Mak в макродиапазоне пробуксовки больше средней силы торможения Fm_Mik в микродиапазоне пробуксовки. Таким образом, в первом случае систему снова переводят в макродиапазон пробуксовки, если этот результат сравнения действует даже при усреднении всех осей, работающих в макродиапазоне пробуксовки и всех осей, работающих в микродиапазоне пробуксовки.
Во втором случае средняя сила торможения Fm_Mak в макродиапазоне пробуксовки меньше вычисленной средней силы торможения Fm_Mik_1 в микродиапазоне пробуксовки. Таким образом, регулировка противоюзной защиты во втором случае продолжает работу системы в микродиапазоне пробуксовки, если этот результат сравнения действует даже при усреднении всех осей, работающих в макродиапазоне пробуксовки и всех осей, работающих в микродиапазоне пробуксовки. Различающиеся средние силы торможения Fm_Mik и Fm_Mik_1 в микродиапазоне пробуксовки, являются, например, результатом разного КПД регулировки микропробуксовки.
На фиг. 4 показана функциональная блок-схема устройства управления противоюзной защитой с адаптивной функцией по второму варианту осуществления изобретения.
Функциональная блок-схема включает множество логических элементов сопряжения и переключающих ступеней с двумя устойчивыми состояниями (триггеров), реализующих необходимую функцию управления.
Тормозной системой управляют вручную через блок 42 тормозных рычагов. Блок тормозных рычагов управляет клапанным блоком 43, загружающим поршень 41 тормозного блока сжатым воздухом. Блок 44 противоюзной защиты осуществляет регулирование противоюзной защиты путем подачи соответствующих команд на клапанный блок 43.
На выходе среднего RS-триггера различают системное состояние макропробуксовки (бинарный параметр MAK_SLP в состоянии «FALSE/«ЛОЖНЫЙ») и состояние микропробуксовки (бинарный параметр MIK_SLP в состоянии «TRUE»/«ИСТИННЫЙ»). Таким образом, состояние на выходе триггера состояния системы идентифицирует активацию макродиапазона или микродиапазона пробуксовки.
При инициализации системы через параметр INIT (вверху слева на фиг. 4), установленный на "TRUE", триггер состояния системы сбрасывают посредством ODER(ИЛИ)-элемента (">1"), соединенного с его входом сброса (R). Следовательно, параметр MIK_SLP устанавливают в состояние "FALSE", а система работает сначала в макродиапазоне пробуксовки. В состоянии макропробуксовки все каналы регулировки (AxCtrl [x]) блока 44 противоюзной защиты работают с надежными обычными параметрами макропробуксовки. Следовательно, параметр заданной величины микропробуксовки MiKslpCtrl[x] на отрицательном выходе RS-триггера слева от блока 47 установлен в логическое состояние "FALSE". Средние суммированные силы (F0m, FBm) и суммированный отрезок трения (SRBm) преобразованы в суммирующий показатель усредненным суммированием конкретных параметров контакта колесо/рельс силы F0[x], предоставленных блоком 44 противоюзной защиты, фактической силы торможения FB[x] и отрезка трения SRB[x]) соответствующих каналов регулирования.
Оценку эффективности регулирования макропробуксовки осуществляют при наличии достаточного отрезка трения (SRBm) путем сравнительного анализа в системном анализаторе 46 фактической силы (FBm) и потенциально возможной в микродиапазоне пробуксовки силы (F0m). При наличии достаточного эффекта макропробуксовки триггер состояния системы загружают не через его установочный вход (S), а параметр MIK_SLP оставляют в состоянии "FALSE", так как система должна остаться в состоянии макропробуксовки. При недостаточном эффекте макропробуксовки триггер состояния системы загружают из-за смены логического состояния на выходе анализатора 46 и систему переводят из-за изменения параметра MIK_SLP на "TRUE" в состояние микропробуксовки.
В режиме микропробуксовки все каналы регулирования начинают работать сначала в микродиапазоне пробуксовки (параметр MiKslpCtrl[x] в состоянии "TRUE"). Параллельно этому выбранная блоком 47 выбора испытуемой оси ось (AdhTst [x]) работает в тестовой фазе (TstMakSIpf[x]) с регулировкой режима макропробуксовки (параметр MiKslpCtrl[x] в состоянии"FALSE").
При возможности оценки эффективности регулирования макропробуксовки испытуемой оси (TstMakSIp[x]) ось выходит из тестовой фазы и происходит оценка продолжения макродиапазона пробуксовки. Оценку осуществляют в блоке-анализаторе осей 45 по тем же правилам, что и для системного уровня, но по отдельным осям. После завершения тестовой фазы продолжение макропробуксовки оси определяется автоматически (параметр MiKslpCtrl[x] в состоянии "FALSE").
Таким образом, в состоянии микропробуксовки осуществляют смешанный режим работы осей в микродиапазоне пробуксовки и в макродиапазоне пробуксовки с разным распределением в зависимости от состояния силового зацепления.
Усредненный показатель (F_MIK) фактических сил торможения осей в микродиапазоне пробуксовки сравнивают в элементе сравнивания (">") (слева вверху на фиг. 4) с усредненным показателем (F_MAK) фактических сил торможения осей в макродиапазоне пробуксовки. Если силы торможения на осях с макропробуксовкой выше, чем на осях с микропробуксовкой, триггер состояния системы сбрасывают через ИЛИ-элемент, состояние микропробуксовки останавливают, а систему переводят в состояние макропробуксовки.
В заключении необходимо отметить возможность начала регулирования в описанных выше вариантах осуществления изобретения в обратном порядке. Таким образом, регулировкой сначала переводят систему в системное состояние микропробуксовки и затем проверяют возможность обеспечения в системном состоянии макропробуксовки достаточной (т.е. более высокой или, по меньшей мере, эквивалентной) мощности торможения. Такой принцип действия имеет смысл, например, при других стандартах.
В итоге описаны устройство и способ адаптивного управления тормозной системой рельсового транспортного средства, причем тормозной системой управляют согласно заданным первому и второму диапазону параметров пробуксовки, причем первый диапазон параметров пробуксовки – это макродиапазон пробуксовки с увеличенным допустимым диапазоном пробуксовки, а второй диапазон параметров пробуксовки – это микродиапазон пробуксовки с более низким допустимым диапазоном пробуксовки, при этом определяют максимально возможную в микродиапазоне пробуксовки силу торможения и среднюю силу торможения тормозной системы в фактическом диапазоне пробуксовки. Переход из макродиапазона пробуксовки в микродиапазон пробуксовки инициируют, если при сравнении заданной средней силы торможения в макродиапазоне пробуксовки с максимально возможной в микродиапазоне пробуксовки силой торможения выявлен недостаточный эффект пробуксовки. В альтернативном варианте переход из микродиапазона пробуксовки в макродиапазон пробуксовки инициируют, если при сравнении заданной средней силы торможения в макродиапазоне пробуксовки с максимально возможной в микродиапазоне пробуксовки силой торможения выявлен достаточный эффект пробуксовки.
Раскрытые в описании, чертежах и в формуле признаки изобретения существенны как по отдельности, так и в любой комбинации для осуществления изобретения.
Тормозной системой (56, 60) управляют согласно заданным первому и второму диапазону параметров пробуксовки. Первый диапазон параметров пробуксовки – это макродиапазон пробуксовки с увеличенным допустимым диапазоном пробуксовки, а второй диапазон параметров пробуксовки – это микродиапазон пробуксовки с более низким допустимым диапазоном пробуксовки. Определяют максимально возможную в микродиапазоне пробуксовки силу торможения и фактическую среднюю силу торможения тормозной системы (56, 60) в фактическом диапазоне пробуксовки. Переход из макродиапазона в микродиапазон пробуксовки инициируют, если сравнение определенной средней силы торможения в макродиапазоне пробуксовки с максимально возможной в микродиапазоне пробуксовки силой торможения выявил недостаточный эффект пробуксовки. В альтернативном варианте переход из микродиапазона в макродиапазон пробуксовки инициируют, если сравнение определенной средней силы торможения в макродиапазоне пробуксовки с максимально возможной в микродиапазоне пробуксовки силой торможения выявил достаточный эффект пробуксовки. Обеспечивается система противоюзной защиты с улучшенными показателями эффективности адаптации. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Устройство (51) адаптивного управления тормозной системой (56, 60) рельсового транспортного средства посредством функции противоюзной защиты, предотвращающей блокировку колеса (52) рельсового транспортного средства при неблагоприятных условиях адгезии в точке контакта колесо/рельс посредством управления противоюзной защитой тормозной системы (56, 60) согласно заданным первому и второму диапазону параметров пробуксовки, причем первый диапазон параметров пробуксовки – это макродиапазон пробуксовки с увеличенным допустимым диапазоном пробуксовки, а второй диапазон параметров пробуксовки – это микродиапазон пробуксовки с более низким допустимым диапазоном пробуксовки, причем устройство содержит:
- средства (302) определения максимальной силы для задания максимально возможной в микродиапазоне пробуксовки силы торможения;
- средства (303, 304) определения силы торможения для задания фактической средней силы торможения тормозной системы (56, 60) в фактическом диапазоне пробуксовки;
- средства (306) сравнения для сравнения заданной средней силы торможения в макродиапазоне пробуксовки с максимально возможной в микродиапазоне пробуксовки силой торможения и
- средства (301, 307) регулировки диапазона пробуксовки для установки макродиапазона или микродиапазона пробуксовки;
причем устройство выполнено для подачи команд средствам (301, 307) регулировки диапазона пробуксовки на инициирование перехода из макродиапазона в микродиапазон пробуксовки на основе результатов сравнения средств (306) сравнения, показывающих наличие недостаточного эффекта пробуксовки в макродиапазоне, или для подачи команд на инициирование перехода из микродиапазона в макродиапазон пробуксовки на основе результатов сравнения средств (314) сравнения, показывающих наличие достаточного эффекта пробуксовки в макродиапазоне.
2. Устройство по п. 1, которое выполнено с возможностью инициирования сравнения средствами (306) сравнения на основе достижения заданного отрезка трения.
3. Устройство по п. 2, которое выполнено с возможностью определения отрезка трения как производного из времени и разницы скоростей колеса (52) и рельсового транспортного средства.
4. Устройство по любому из пп. 1-3, которое при переходе в микродиапазон пробуксовки оставляет по меньшей мере одну ось рельсового транспортного средства в качестве испытуемой оси для тестовой фазы в макродиапазоне пробуксовки.
5. Устройство по п. 4, которое выполнено с возможностью завершения тестовой фазы испытуемой оси при достижении заданного наложенного отрезка трения или максимального времени теста.
6. Устройство по п. 4 или 5, которое выполнено с возможностью подачи команд средствам (301, 307) регулировки диапазона пробуксовки на завершение диапазона макропробуксовки испытуемой оси, если средняя сила торможения на испытуемой оси меньше постоянной максимально возможной в микродиапазоне пробуксовки силы торможения.
7. Устройство по любому из пп. 1-6, содержащее дополнительные средства (314) сравнения для сравнения средней силы торможения осей, работающих в макродиапазоне пробуксовки, со средней силой торможения осей, работающих в микродиапазоне пробуксовки, причем устройство инициирует в средствах (301, 307) регулировки диапазона пробуксовки команду на работу всех осей тормозной системы в макродиапазоне пробуксовки, если средняя сила торможения осей в макродиапазоне пробуксовки превосходит среднюю силу торможения осей в микродиапазоне пробуксовки, или команду на работу всех осей тормозной системы в микродиапазоне пробуксовки, если средняя сила торможения осей в микродиапазоне пробуксовки превосходит среднюю силу торможения осей в макродиапазоне пробуксовки.
8. Устройство по п. 7, которое выполнено с возможностью вычисления средней силы торможения осей посредством суммирования средних сил торможения соответствующих осей.
9. Устройство по любому из пп. 1-8, в котором средства (302) определения максимальной силы предназначены для вычисления максимально возможной в микродиапазоне пробуксовки силы торможения при полном переходе точки контакта колесо/рельс в фазу юза посредством корреляции с необходимой силой.
10. Способ адаптивного управления тормозной системой (56, 60) рельсового транспортного средства посредством предотвращения блокировки колеса (52) рельсового транспортного средства при неблагоприятных условиях адгезии в точке контакта колесо/рельс, причем тормозной системой (56, 60) управляют согласно заданным первому и второму диапазону параметров пробуксовки, причем первый диапазон параметров пробуксовки – это макродиапазон пробуксовки с увеличенным допустимым диапазоном пробуксовки, а второй диапазон параметров пробуксовки – это микродиапазон пробуксовки с более низким допустимым диапазоном пробуксовки, при котором выполняют следующие этапы:
- определяют (302) максимально возможную в микродиапазоне пробуксовки силу торможения;
- определяют (303, 304) среднюю силу торможения тормозной системы в фактическом диапазоне пробуксовки;
- сравнивают (306) определенную среднюю силу торможения в макродиапазоне пробуксовки с максимально возможной в микродиапазоне пробуксовки силой торможения; и
- инициируют (307) переход из макродиапазона в микродиапазон пробуксовки на основе результатов сравнения на этапе (306), показывающих наличие недостаточного эффекта пробуксовки в макродиапазоне, или перехода из микродиапазона в макродиапазон пробуксовки на основе результатов сравнения на этапе (314), показывающих наличие достаточного эффекта пробуксовки в макродиапазоне.
| АДАПТИВНАЯ ЗАЩИТА ОТ ПРОСКАЛЬЗЫВАНИЯ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ С РЕГУЛЯТОРОМ ПРОСКАЛЬЗЫВАНИЯ | 2006 |
|
RU2381927C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| WO 2008067858 A1, 12.06.2008. | |||

