Изобретение относится к области авиационной техники и может быть применено в конструкции гибридных реактивных самолетов-вертолетов, имеющих на консолях дупланных крыльев однолопастные несущие винты (ОНВ), V-образное оперение и свободные силовые турбины в подкрыльных гондолах, приводящие поперечные ОНВ и в кольцевых обтекателях выносные вентиляторы, создающие при вертикальном и коротком взлете/посадке (ВВП и КВП) пропульсивно-реактивную тягу, направленную горизонтально назад с работающими/авторотирующими ОНВ или зафиксированными их лопастями-крыльями над первым крылом при горизонтальном полете в конфигурации реактивных винтокрыла/крылатого автожира или самолета дупланной схемы.
Известен самолет вертикального взлета и посадки модели (СВВП) DO.31 компании Dornier (ФРГ), имеющий высокорасположенное крыло, на концах которого смонтированы гондолы с подъемными турбореактивными двухконтурными двигателями (ТРДД), создающими вертикальную тягу наравне с подкрыльными подъемно-маршевыми ТРДД, имеющими отклоняемые вниз-вверх боковые поворотные сопла, изменяющие вектор реактивной тяги каждого ТРДД, хвостовое крестообразное оперение.
Признаки, совпадающие - комбинированная силовая установка имеет два подъемно-маршевых ТРДД компании Бристоль Сиддли мод. BS.53 "Пегас" 5-2 с тягой по 7000 кгс, установленных в гондолах под крылом. Гондолы ТРДД имеют воздухозаборники осевые нерегулируемые и с каждой их стороны по две пары поворотных сопла с управляемым вектором тяги, которые поворачиваются в вертикальной плоскости для направления выходящей из ТРДД струи газов назад параллельно оси СВВП при горизонтальном полете или вниз при выполнении ВВП. Подъемные ТРДД компании Роллс-Ройс мод. RB. 162-4 тягой по 2000 кгс, установленные по четыре в двух гондолах, имеют общие воздухозаборники с открывающимися их створками, снабжены соплами с дефлекторами, отклоняющими поток газов на 15° вперед или назад.
Причины, препятствующие поставленной задаче: первая - это то, что подкрыльное расположение ТРДД с их боковыми соплами, изменяющими вектор реактивной их тяги, предопределяет наличие с каждой стороны гондолы их обтекателей и сложной системы синхронного отклонения вниз-вверх потока струи газов каждого ТРДД, что усложняет конструкцию. Вторая - это то, что сопла подъемных ТРДД на концах крыла с увеличением угла его атаки на переходных режимах полета создают опасность появления на крыле срыва потока до создания подъемными ТРДД и поворотными соплами подъемно-маршевых ТРДД необходимой подъемной силы, что снижает надежность и поперечную управляемость. Третья - это то, что для выполнения ВВП и зависания имеется двойная раздельная система создания вертикальной тяги и поперечно-продольной управляемости (подъемные ТРДД и боковые сопла ТРДД), что неизбежно ведет к утяжелению, увеличению объема регламентных работ и удорожанию эксплуатации, но и уменьшению весовой отдачи, так как при горизонтальном его полете сами подъемные ТРДД, увеличивая паразитную массу, бесполезны. Все это ограничивает возможность повышения скорости и дальности полета соответственно более 644 км/ч и 681 км, а использование подъемных ТРДД при выполнении ВВП и зависания приводит к увеличению показателей топливной эффективности до 204,38 г/пасс⋅км при целевой нагрузке (ЦН), составляющей 44 человека.
Известен СВВП проекта HS.803 компании Hawker Siddeley (Великобритания), содержащий низко-расположенное крыло, силовую установку с реактивными двигателями на концах и по бокам фюзеляжа и двигателями на концах крыла в гондолах, снабженных над ними пилонами с несущими винтами (НВ), имеет Т-образное хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие подкрыльных обтекателей с НВ, создающими только вертикальную тягу, струйную систему с воздуховодом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности двух двигателей, имеющих газогенераторы, воздух которых, направляясь к воздушным турбинам, будет вращать НВ. Особенностью конструкции коммерческого СВВП проекта HS.803 с пассажировместимостью 100 человек и дальностью действия до 931 км были - концепция Control Circulation Rotors (CCR), т.е. роторы с регулируемой циркуляцией и неподвижное размещение под крылом двигателей: при переходе в самолетный режим полета останавливались только трехлопастные НВ, имеющие узлы складывания и фиксирования их лопастей, которые располагались параллельно оси симметрии.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на концах крыла подкрыльных обтекателей с воздушными турбинами и НВ, имеющими автоматы перекосов с управлением их общего, циклического и дифференциального изменения их шага, что предопределяет конструктивно сложное стреловидное крыло с воздуховодами, оснащенное сложной системой привода НВ и механизации крыла, что усложняет конструкцию и уменьшает надежность, но и значительно увеличивает габаритные размеры по ширине с вращающимися НВ. Вторая - это то, что диаметры двух НВ ограничены размахом консолей крыла и как, следствие, при висении поток от НВ, обдувая консоли крыла и создавая значительную общую потерю (≈18%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что силовая установка включает двигатели избыточной мощности, используемой при выполнении ВВП на 50%, что весьма снижает весовую отдачу, особенно, при отказе одного из них, а расположение на концах крыла НВ с зафиксированными их лопастями предопределяет, повышая аэродинамическое сопротивление, ограничения в достижении крейсерской скорости только до 695,0 км/ч. Все это ограничивает возможность уменьшения массы конструкции планера, повышения ЦН и увеличения весовой отдачи, особенно, при удвоении тяговооруженности и без дальнейшего увеличения диаметра НВ, но и улучшения стабильности продольной управляемости при выполнении ВВП и зависания с Т-образным хвостовым оперением.
Наиболее близким к предлагаемому изобретению является проект винтокрыла модели Ка-35Д ОКБ «им. Камова» (РФ), выполненный по двухвинтовой поперечно-несущей схеме (ДПНС), содержит трансмиссию и двигатели силовой установки (СУ), приводящие несущие винты (НВ), размещенные на консолях крыла, турбореактивные двигатели, установленные под крылом, для создания маршевой тяги, имеет фюзеляж, хвостовое оперение и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - на консолях крыла умеренного удлинение λ=5,4 и размаха имеются пилоны с НВ, вращающимися в противоположных направлениях. Каждый НВ, вал которого отклонен вперед по полету, имеет автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной и пропульсивной силы, а поступательное движение в скоростном полете обеспечивают в большей степени турбореактивные двигатели (ТРД). Комбинированные несущая и движительная системы обеспечивают на винтокрыле возможность вертикального взлета и посадки, висение и способность перехода на самолетные режимы полета на больших скоростях. Основную часть подъемной силы в самолетной конфигурации создает крыло, а два ТРД, установленных в подкрыльных гондолах, обеспечивают маршевую тягу только при горизонтальном полете, особенно, когда НВ станут вращаться на режиме близко к самовращению, как у автожира, создавая при этом только подъемную силу (авторотирующие НВ используются как несущая система, не создавая пропульсивной тяги), а потребную при этом маршевую тягу для полета создают два ТРД, что обеспечит винтокрылу более высокую скорость, чем у вертолета. При скорости полета свыше 250 км/ч винтокрыл летит как автожир и крыло при этом несет 60% его взлетного веса. Использование крыла для разгрузки НВ с ростом скорости винтокрыла позволяет увеличить скорость горизонтального полета до 540 км/ч, повысить аэродинамическое качество и уменьшить нагрузки в несущей системе.
Причины, препятствующие поставленной задаче: первая - это то, что винтокрыл имеет двойную раздельную систему создания подъемной силы и горизонтальной тяги, что неизбежно ведет к его утяжелению и снижению весовой отдачи, особенно, с одноконтурными ТРД, смонтированными под крылом, но и увеличению объема регламентных работ и удорожанию эксплуатации четырехлопастных НВ, что значительно осложняет конструкцию шарнирного крепления их лопастей, а постоянные вибрации, возникающие при работе автоматов их перекоса, создают неблагоприятные условия для работы других механизмов и оборудования. Вторая - это то, что на режиме висения поток от НВ, обдувая консоли «самолетного» крыла площадью 105,0 м2 и создавая значительную (почти 12,5%) общую потерю в их вертикальной тяге, затормаживается. При этом скоростной воздушный поток, отбрасываемый от крыла и даже при отклоненных закрылках и со средней аэродинамической хордой крыла равной 3,9 м, предопределяет образование вихревых колец, которые могут на низких скоростях снижения резко уменьшать силу тяги НВ и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. А по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне каждого НВ над фюзеляжем возникает участок, в котором абсолютная скорость его лопастей относительно воздуха становится практически нулевой и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в поперечном канале, особенно, из-за расположения этих участков как раз над консолями крыла. Третья - это то, что в винтокрыле поперечной схемы с двумя движительно-несущими винтовыми системами, смонтированными в подкрыльных гондолах и на консолях высокорасположенного крыла соответственно, предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой редуцирования НВ в каждом консольном редукторе. Четвертая - это то, что для обеспечения прочности и жесткости крыла большого размаха, необходимо увеличивать строительную высоту крыла и площадь сечения силовых элементов, что приводит к значительному увеличению веса конструкции, увеличению лобового сопротивления и, как следствие, к снижению скорости и весовой отдачи. Кроме того, в такой конструкции, не исключалось появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, а также и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса НВ на упругом основании. Возникновение резонанса в поперечной схеме увеличивалось из-за наличия на консолях крыла тяжелых редукторов НВ, вследствие чего собственные частоты колебаний конструкции оказывались соизмеримы с частотой вращения НВ. Другим недостатком является то, что турбовальные двигатели со свободной турбиной позволяют уменьшить частоту вращения НВ только на 10-12%, а уменьшение частоты их вращения до 40% потребует использование различного рода муфт и коробок скоростей. Что значительно утяжеляет конструкцию и обеспечивает, уменьшая вес топлива, более высокий удельный расход топлива и, как следствие, ограничивает возможность дальнейшего повышения ЦН, скорости и дальности полета.
Предлагаемым изобретением решается задача в указанном выше известном проекте винтокрыла модели Ка-35Д увеличения целевой нагрузки и весовой отдачи, повышения скорости и дальности полета, уменьшения вибраций и исключения возникновение резонанса в конфигурации автожира с авторутирующими НВ и возможности трансформации в полетную конфигурацию реактивного самолета с зафиксированными на концах крыла лопастями-крыльями однолопастных НВ.
Отличительными признаками предлагаемого изобретения от указанного выше известного проекта винтокрыла модели Ка-35Д, наиболее близкого к нему, являются наличие того, что он в интегральной аэродинамической схеме снабжен как несущим фюзеляжем, носовая часть которого плавно сопряжена с вихре образующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки крыла и, отклоняясь к носовой части фюзеляжа, образуют в плане V-образную с округленной вершиной конфигурацию, так и не менее чем парой комбинированных газотурбинных двигателей (КГтД), левый и правый из которых установлен в гондоле на подкрыльном пилоне и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере одной свободной силовой турбиной (ССТ), передающей взлетную мощность комбинированной силовой установки (СУ) посредством системы трансмиссии на соответствующие однолопастные НВ (ОНВ) в симметрично-сбалансированной упомянутой ДПНС-Х2 и/или ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, установленным перед и соосно с промежуточным редуктором для создания, например, в пропульсивно-реактивной системе (ПРС-R2) синхронной реактивной тяги горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и в дупланной аэродинамической схеме оснащен низко- или высокорасположенными с положительным или отрицательным углом (ϕ) поперечного V и разновеликими по размаху первым и вторым стреловидными крыльями (ПСК и ВСК), имеющими соответственно большое удлинение λ=13,0 и λ=18,6-21,7, размах в 1,03 и 2,03 раза больше диметра (D) ОНВ и угол стреловидности, например, χ=+23° или χ=+26°, интегрированными с подкрыльными пилонами, смонтированными на конце первого ПСК, конструктивно объединяющим ПСК с ВСК, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого или вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с ОНВ, смонтированными на надкрыльном пилоне, установленным на конце ПСК и интегрированным с подкрыльным пилоном, работающими на режимах их авторотации или в качестве несущих их стреловидных лопастей-крыльев (СЛК), образованных при фиксации ОНВ с их противовесами или трансформации их противовесов, осуществляемой на переходных режимах полета последовательно, когда после вертикального/короткого взлета, набора высоты и выполнения разгонного полета левый и правый ОНВ одновременно предварительно остановлены так, что их противовесы и лопасти зафиксированы в плане соответственно от конца ПСК во внутрь к и наружу от оси симметрии или при остановленных СЛК их профилированные противовесы снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 113° или 126° в горизонтальной плоскости и их размещения параллельно оси симметрии при фиксировании с соответствующей стреловидностью по передней кромке СЛК левого и правого ОНВ, которые имеют противоположное направление их вращения соответственно по часовой и против часовой стрелки и обеспечивают с ПСК и ВСК равновеликую стреловидность χ=+23° или χ=+26° и организуют соответственно синхронно-симметричные несущие поверхности их СЛК в полетной конфигурации реактивного или трансзвукового самолета с ПРС-R2 и с системой ступенчатых разноуровневых крыльев (ССРК), преобразующей удлинение ПСК с λ=13,0 до большого удлинении ВСК с удлинением λ=17,6…21,7 и включающей при виде спереди с ярусным размещением на концах ПСК наружу от него зафиксированные широкохордовые СЛК ОНВ, выполняющие роль внешних верхних секций ПСК, но и обратно, при этом в системе трансмиссии каждый КГтД с кольцевым обтекателем ВОВ содержит, например, две ССТ, снабженные передним выводом вала для отбора взлетной их мощности, смонтированные по обе стороны от подкрыльного пилона в подкрыльной гондоле, в которой между ВОВ и ССТ смонтирован Т-образный как при виде сверху, так и сбоку промежуточным редуктор, имеющий продольные входные валы от двух ССТ и выходные как передний, так и верхний валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - передает через муфту сцепления крутящий момент на соответствующий входной вал консольного редуктора ОНВ, размещенный в надкрыдьном пилоне, имеет выходной вертикальный вал, который равноудален в плане от центра масс и отклонен как назад по полету на угол (α), который при его размещении параллельно плоскости симметрии при виде спереди равен 1/2 или равновелик величине угла атаки (α) соответственно ПСК или ВСК, так и к плоскости или наружу от плоскости симметрии на угол (ϕ), который равновелик величине угла (ϕ) поперечного V соответственно ПСК или ВСК.
Кроме того, набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей ОНВ в упомянутой ДПНС-Х2 и зафиксированные их упомянутые СЛК, преобразующие дупланную схему с упомянутым разновеликим размахом ПСК и ВСК в упомянутую ССРК с равновеликим их размахом при совместном большом удлинении ССРК, соответствующему величине λ=10,6…11,7, причем при выполнении технологии КВП и горизонтального поступательного полета в конфигурации винтокрыла, крылатого автожира или самолета с упомянутыми ПСК и ВСК, внутренние межгондольные секции которых снабжены соответственно предкрылками и закрылками, а роль элеронов выполняют авторотирующие ОНВ или зафиксированные упомянутые их СЛК посредством соответствующего изменения циклического шага соответствующих ОНВ или дифференциальным изменением угла установки соответствующих лопастей ОНВ, при этом на режимах ВВП и зависания в упомянутой ДПНС-Х2 ее упомянутые ОНВ, выполненные с жестким креплением их лопастей и автоматом их перекоса, обеспечивающие изменение балансировки по тангажу, курсу и крену, которое создается изменением соответствующего циклического шага и дифференциальным изменением тяги посредством общего шага двух ОНВ соответственно, причем хвостовая балка на ее конце снабжена профилированным обтекателем, который, образуя несущую поверхность, имеет как V-образную в плане заднюю кромку, так и интегрирован по внешним его бортам со стреловидными килями V-образного оперения, имеющими при виде сбоку серповидные законцовки и форкили, которые распространяются вперед за заднюю кромку ВСК, выполняя с внешних бортов фюзеляжа роль верхних стреловидных гребней, нижние части которых для направления воздушного потока интегрированы с верхней частью фюзеляжа и размещены в плане параллельно к оси симметрии, при этом передняя часть фюзеляжа, имеющая снизу к носовому обтекателю возвышающий ее скос, угол которого при виде сбоку равновелик или равен 1/2…1/3 величине угла возвышающего скоса к высокорасположенной хвостовой балке на конце фюзеляжа, имеющего овальное сечение, которое в его центре выполнено в виде круга, снабженного диаметрально расположенными по его внешним бортам и сверху соответствующего диаметра полукругами, верхний меньший полукруг из которых, размещаясь от носовой части фюзеляжа до обтекателя центроплана ВСК, образует поперечное сечение с верхней треугольно подобной округлой конфигурацией, сужающейся на ее конце при виде сверху, распространяющейся до форкилей и создающей совместно с их стреловидными гребнями, смонтированными в плоскости килей V-образного оперения, как улучшение направления потока низкоэнергетического пограничного слоя над фюзеляжем, достигая ламинарного его обтекания, так и уменьшение полного сопротивления на 9%, причем на режимах ВВП и зависания при удельной нагрузке на мощность СУ, составляющей ρN=1,95 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,63, включает как режим ее работы при отборе 100%, так и 75% или 50% взлетной ее мощности на привод упомянутых ОНВ соответственно как от четырех работающих ССТ, так и от трех или двух работающих ССТ соответственно при отказе ССТ в одной гондоле с любой стороны или двух ССТ из противоположных гондол, но и, например, даже в последнем случае после автоматического включения чрезвычайного режима (ЧР) работы двух оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,19 или ρВТ=1,075, обеспечат два режим аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, при этом на режимах ВВП и зависания в каждой ССТ система УФБП, содержащая: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и фюзеляжа, и дисков вращения упомянутых ОНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего его безопасного снижения; компьютер управления полетом, расположенный в его бортовой системе управления (БСУ) и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию фюзеляжа и несущей его системы с выбранной относительной его позицией; определить скорость управляемого снижения, необходимую для его перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом.
Кроме того, упомянутая система УФБП с одним или несколькими датчиками, включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных лазерных и ультразвуковых датчиков, и датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом передачи данных, расположенным на его планере для получения глобальных данных о местоположении посредством приема его БСУ данных сигналов спутниковой навигационной системы ГЛОНАСС, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем компьютер суммирования данных полностью интегрирован в интерфейс пилота и его БСУ, обеспечивающей упомянутое следящее его безопасное снижение, которое по необходимости может быть отключено посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, при этом компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет небезопасен для относительного его положения относительно уровня земли или поверхности посадочной площадки, но и отключающего формирование упомянутого прямого управляемого безопасного снижения через компьютер управления полетом.
Кроме того, для барражирующего экономичного скоростного горизонтального полета каждый ОНВ в синхронно-сбалансированной несущей и авторотирующей системе, включающей в каждом упомянутом консольном редукторе автоматическую коробку передач, имеющую для привода ОНВ упомянутый вертикальный выходной вал, который создает по два потока: первый - взлетный с выдачей соответствующей мощности от упомянутых КГтД и созданием подъемной силы от ОНВ, второй - крейсерский в конфигурации крылатого автожира с приемом мощности от авторотации соответствующего ОНВ на ее соответствующую ступень, отключающую консольный редуктор от трансмиссии, приводящую генератор и управляющую синхронным снижением скорости их вращения, например, до 200 мин-1 или 100 мин-1, углом атаки лопастей авторотирующих ОНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы упомянутых ПК и ЗСК, но и плоскостью вращения лопастей ОНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ОНВ на 12-15% от общего сопротивления профиля лопастей ОНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых ПСК и ЗСК с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного самолета, при этом для высокоскоростного горизонтального полета в упомянутой комбинированной СУ, достигая маршевой тяговоуроженности до 0,23 и 0,3, используется 36% и 54% мощности при удельной нагрузке на нее ρN=1,95 кг/л.с. соответственно от двух и трех работающих упомянутых КГтД и только на привод их ВОВ в конфигурации упомянутого реактивного самолета дупланной схемы.
Кроме того, для высокоскоростного горизонтального полета в упомянутой комбинированной СУ, достигая маршевой тяговоуроженности с 0,3 до 0,363, используется взлетная ее мощность с 54% до 72% соответственно от трех и четырех работающих упомянутых КГтД и только на привод упомянутых ВОВ в конфигурации упомянутого трансзвукого самолета дупланной схемы, упомянутая ССРК которого, имея по передней ее кромке стреловидность с углом χ=+26° или χ=+30°, обеспечивает на высоте 11 км скорость полета 0,753 Маха (М) или М=0,786, а при достижении маршевой тяговоуроженности до 0,45 скорость полета при пикировании повышается до M=0,786 или М=0,87 соответственно.
Благодаря наличию этих признаков, позволяющих освоить гибридный реактивный самолет-вертолет (ГРСВ), который в интегральной аэродинамической схеме снабжен как несущим фюзеляжем, носовая часть которого плавно сопряжена с вихре образующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки крыла и, отклоняясь к носовой части фюзеляжа, образуют в плане V-образную с округленной вершиной конфигурацию, так и не менее чем парой комбинированных газотурбинных двигателей (КГтД), левый и правый из которых установлен в гондоле на подкрыльном пилоне и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере одной свободной силовой турбиной (ССТ), передающей взлетную мощность комбинированной силовой установки (СУ) посредством системы трансмиссии на соответствующие однолопастные НВ (ОНВ) в симметрично-сбалансированной упомянутой ДПНС-Х2 и/или ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, установленным перед и соосно с промежуточным редуктором для создания, например, в пропульсивно-реактивной системе (ПРС-R2) синхронной реактивной тяги горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и в дупланной аэродинамической схеме оснащен низко- или высокорасположенными с положительным или отрицательным углом (ϕ) поперечного V и разновеликими по размаху первым и вторым стреловидными крыльями (ПСК и ВСК), имеющими соответственно большое удлинение λ=13,0 и λ=18,6-21,7, размах в 1,03 и 2,03 раза больше диметра (D) ОНВ и угол стреловидности, например, χ=+23° или χ=+26°, интегрированными с подкрыльными пилонами, смонтированными на конце первого ПСК, конструктивно объединяющим ПСК с ВСК, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого или вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с ОНВ, смонтированными на надкрыльном пилоне, установленным на конце ПСК и интегрированным с подкрыльным пилоном, работающими на режимах их авторотации или в качестве несущих их стреловидных лопастей-крыльев (СЛК), образованных при фиксации ОНВ с их противовесами или трансформации их противовесов, осуществляемой на переходных режимах полета последовательно, когда после вертикального/короткого взлета, набора высоты и выполнения разгонного полета левый и правый ОНВ одновременно предварительно остановлены так, что их противовесы и лопасти зафиксированы в плане соответственно от конца ПСК во внутрь к и наружу от оси симметрии или при остановленных СЛК их профилированные противовесы снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 113° или 126° в горизонтальной плоскости и их размещения параллельно оси симметрии при фиксировании с соответствующей стреловидностью по передней кромке СЛК левого и правого ОНВ, которые имеют противоположное направление их вращения соответственно по часовой и против часовой стрелки и обеспечивают с ПСК и ВСК равновеликую стреловидность χ=+23° или χ=+26° и организуют соответственно синхронно-симметричные несущие поверхности их СЛК в полетной конфигурации реактивного или трансзвукового самолета с ПРС-R2 и с системой ступенчатых разноуровневых крыльев (ССРК), преобразующей удлинение ПСК с λ=13,0 до большого удлинении ВСК с удлинением λ=17,6…21,7 и включающей при виде спереди с ярусным размещением на концах ПСК наружу от него зафиксированные широкохордовые СЛК ОНВ, выполняющие роль внешних верхних секций ПСК, но и обратно, при этом в системе трансмиссии каждый КГтД с кольцевым обтекателем ВОВ содержит, например, две ССТ, снабженные передним выводом вала для отбора взлетной их мощности, смонтированные по обе стороны от подкрыльного пилона в подкрыльной гондоле, в которой между ВОВ и ССТ смонтирован Т-образный как при виде сверху, так и сбоку промежуточным редуктор, имеющий продольные входные валы от двух ССТ и выходные как передний, так и верхний валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - передает через муфту сцепления крутящий момент на соответствующий входной вал консольного редуктора ОНВ, размещенный в надкрыдьном пилоне, имеет выходной вертикальный вал, который равноудален в плане от центра масс и отклонен как назад по полету на угол (α), который при его размещении параллельно плоскости симметрии при виде спереди равен 1/2 или равновелик величине угла атаки (α) соответственно ПСК или ВСК, так и к плоскости или наружу от плоскости симметрии на угол (ϕ), который равновелик величине угла (ϕ) поперечного V соответственно ПСК или ВСК. Все это позволит увеличить показатели аэродинамических и структурных преимуществ дупланной схемы интегральной компоновки, включающей несущий фюзеляж с ПСК и ВСК и вихре образующими их наплывами, увеличивающими на больших углах атаки несущую способность. В крейсерском полете вихре образующие наплывы, имея нулевой угол атаки, исключают тем самым дополнительное сопротивление. Горизонтальную и вертикальную тяги обеспечивают соответственно два ВОВ в ПРС-R2 и два ОНВ в ДПНС-Х2, а подъемную силу - авторотирующая или несущая системы. Первая из систем включает многоскоростную автоматическую коробку передач, управляющую как снижением скорости вращения ОНВ до 200 мин-1 или 100 мин-1, так и углом атаки лопастей ОНВ, но и плоскостью их вращения, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- и высокоскоростного полета. Что приводит к уменьшению вращательного сопротивления ОНВ на 12-15% от общего сопротивления профиля лопастей ОНВ и возможности расчета их ПСК и ВСК на крейсерский полет с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного самолета. Два КГтД с ВОВ и реактивными соплами в ПРС-R2 размещены под ПСК и ВСК в ГРСВ-5,4, что позволит в сравнении с конвертопланом V-22 Osprey и его ЦН=5,4 т увеличить при выполнении ВВП скорость/дальность полета в 1,4/1,35 раза при крейсерском полете в конфигурации реактивных автожира/реактивного самолета дупланой схемы и достичь трансзвуковой скоростью 924 км/ч.
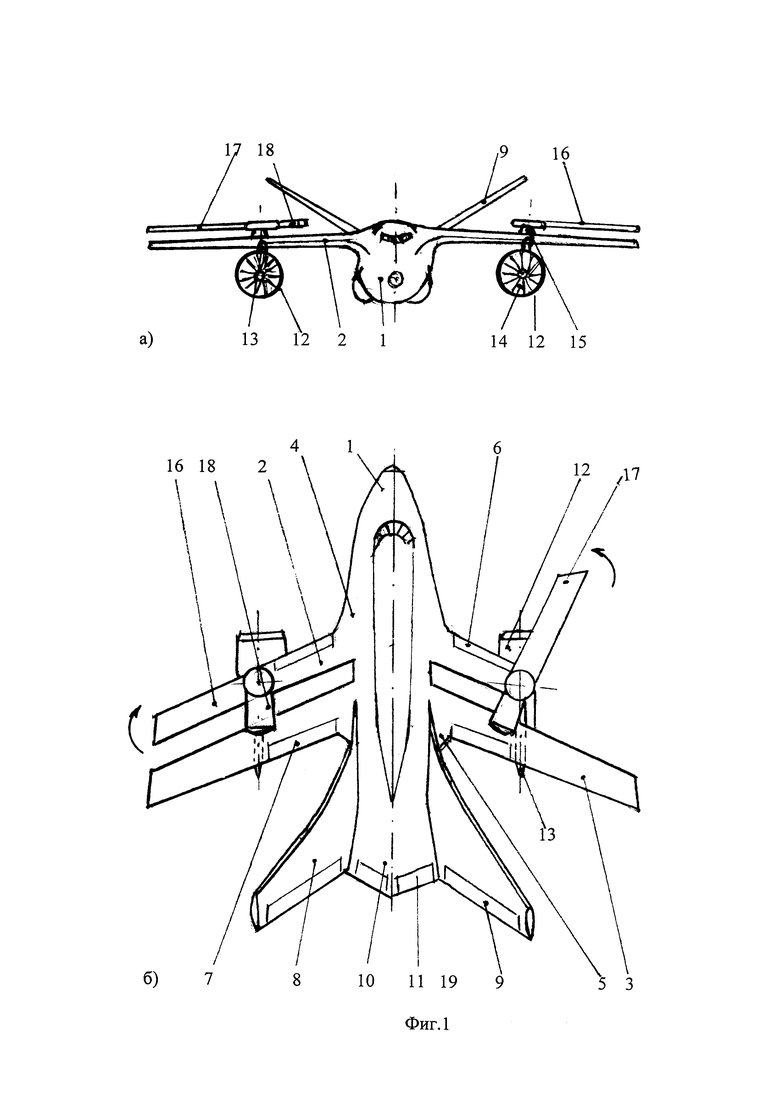
Предлагаемое изобретение предпочтительного исполнения многоцелевого ГРСВ с ПСК и ВСК и их стреловидностью по передней кромке χ=+26°, V-образным оперением, двумя КГтД, имеющими в каждом пару ССТ, установленными в гондолах на подкрыльных пилонах, объединяющих ПСК и ВСК, приводящими в кольцевых обтекателях два ВОВ в ПРС-R2 и в ДПНС-Х2 два ОНВ, смонтированных на концах ПСК, иллюстрируется на фиг. 1 и общих видах спереди и сверху соответственно а) и б):
а) в полетной конфигурации крылатого автожира или реактивного самолета с ПСК и ВСК, создающим большую подъемную силу, чем подъемная сила, создаваемая авторотирующими ОНВ или зафиксированными их СЛК, и двумя КГтД с ВОВ, размещенными в гондолах, создающими маршевую тягу в ПРС-R2 скоростного или трансзвукового полета с условным размещением авторотирующих наружу правого ОНВ с его профилированным противовесом или зафиксированного наружу от ПСК и перед ВСК левого ОНВ в его СЛК со сложенным его противовесом вдоль оси;
б) в полетной конфигурации вертолета или реактивного самолета с ПСК и ВСК с отклоненными их предкрылками и закрылками, уменьшая затенение на 7% от работающих поперечных ОНВ, создающих подъемную силу при выполнении ВВП и зависания или трансзвукового полета с условным размещением зафиксированного наружу от ПСК и перед ВСК левого ОНВ в его СЛК со сложенным его противовесом вдоль оси симметрии и работающими двумя ВОВ, создающими маршевую реактивную тягу в ПРС-R2, приводимых от двух КГтД с работающими четырьмя ССТ.
Многоцелевой ГРСВ без аэродромного базирования, представленный на фиг. 1, выполнен по концепции ДПНС-Х2 и двумя ВОВ в ПРС-R2, имеет в интегральной аэродинамической схеме планер из алюминиевых сплавов и композитного углепластика, содержит несущий фюзеляж 1, ПСК 2 и ВСК 3 с вихре образующими передними 4 и развитыми задними 5 наплывами, внутренними предкрылками 6 и закрылками 7 соответственно, но и снабжен V-образным оперением, кили 8 которого имеют рули направления 9. Тонкая профилированная часть 10 на конце фюзеляжа 1, имеющая V-образную в плане заднюю ее кромку, снабжена по обе стороны от оси симметрии элевоны 11. Консоли ПСК 2 и ВСК 3 со стреловидностью χ=+26° смонтированы с отрицательным углом поперечного V. Два КГтД, имеющих в каждом пару ССТ, установлены в гондолах 12 на подкрыльных пилонах 13, объединяющих ПСК 2 и ВСК 3, приводящих в кольцевых обтекателях два ВОВ 14. В ПРС-R2 каждый из КГтД имеет внешний и внутренний контуры соответственно с ВОВ 14 и парой ССТ с круглыми их реактивными соплами, (на фиг. 1 не показано). Кили 8 V-образного оперения смонтированы по внешним бортам высокорасположенной тонкой профилированной части 10. Каждый консольный редуктор ОНВ 16-17 размещен в соответствующем надкрыдьном пилоне 15, имеет выходной вертикальный вал, который равноудален в плане от центра масс и отклонен назад по полету на угол и наружу. На концах ПСК 2 смонтированы надкрыльные пилоны 15 с левым 16 и правым 17 ОНВ, имеющими для полной компенсации реактивного крутящего момента на режимах ВВП и зависания противоположное их вращение соответственно по часовой и против часовой стрелки, выполнены с автоматом перекоса и жестким креплением их лопастей и профилированных противовесов 18. Форкили 19 килей 8 V-образного оперения распространяются вперед до задних 4 наплывов ВСК 2, выполняя с внешних их бортов роль стреловидных аэродинамических гребней. Комбинированная СУ включает два КГтД, имеющих в каждом пару ССТ, снабжены передним выводом вала для отбора мощности от каждого и возможности передачи мощности от них на каждый консольный редуктор ОНВ 16-17 (на фиг. 1 не показаны), который передает 100% от взлетной мощности СУ при выполнении ВВП и зависания или горизонтального поступательного полета между соответственно двумя ОНВ 16-17 в ДПНС-Х2 и двумя ВОВ 14 в ПРС-R2.
Управление ГРСВ обеспечивается циклическим, общим и дифференциальным изменением шага ОНВ 16-17 и отклонением рулей направления 9 и элевонов 11. При крейсерском скоростном или высокоскоростном полете в конфигурации крылатого автожира или реактивного самолета подъемная сила создается соответственно авторотирующими ОНВ 16-17 с ПСК 2 и ВСК 3 или ПСК 2 и ВСК 3 с зафиксированными СЛК 16-17 ОНВ (см. фиг. 1б) в ССРК, маршевая реактивная тяга - системой ПРС-R2 через реактивные сопла КГтД в гондолах 12, на режиме перехода - ПСК 2 и ВСК 3 с ОНВ 16-17. После создания подъемной тяги ОНВ 16-17 в ДПНС-Х2 обеспечиваются режимы ВВП и зависания или КВП при создании реактивными соплами КГтД требуемой маршевой тяги для поступательного полета (см. рис. 1а). При выполнении ВВП и зависания изменение балансировки по тангажу, крену и курсу обеспечивается изменением соответствующего циклического шага и дифференциальным изменением тяги общего шага левого 16 и правого 17 ОНВ в ДПНС-Х2 (см. рис. 1б). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ОНВ 16-17. По мере разгона с ростом подъемной силы ВСК 2 подъемная сила ОНВ 16-17 уменьшается. При достижении скоростей полета 400…450 км/ч и для перехода на самолетный режим полета ОНВ 16-17 синхронно останавливаются так, что их лопасти-крылья предварительно размещены при виде сверху параллельно передней кромке ПСК 2, которые затем синхронно останавливаются так, что СЛК ОНВ 16-17 зафиксированы с прямой стреловидностью по передним их кромкам, образуя равновеликую стреловидность χ=+28° с ПСК 2 (см. фиг. 1б). При создании реактивной тяги плоскими соплами 15 производится высокоскоростной крейсерский полет ГРСВ, при котором путевое управление обеспечивается рулями направления 9. Продольное и поперечное управление при этом осуществляется синфазным и дифференциальным отклонением элевонов 11 профилированной части 10 на конце фюзеляжа 1.
Таким образом, многоцелевой ГРСВ дупланной схемы с ПСК и ВСК, V-образным оперением и двумя КГтД с ССТ, имеющий для создания горизонтальной тяги два ВОВ в ПРС-R2 и вертикальной тяги два ОНВ в ДПНС-Х2 или подъемной силы соответственно с работающими ОНВ или зафиксированными их СЛК, представляет собой конвертоплан с ДПНС-Х2 и ПРС-R2, изменяющий свою полетную конфигурацию только благодаря изменении условий работы и фиксации ОНВ посредством того, что набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно передние кромки наступающих лопастей ОНВ и зафиксированных их СЛК, увеличивающих несущую способность ПСК и ВСК, выполняющих в ССРК роль верхних его секций в конфигурации реактивного\трансзвукового самолета.
В концепции ДПНС-Х2 фиксация (fixation) лопастей поперечных ОНВ, изменяющая условия их работы в полетной конфигурации вертолета, крылатого автожира или реактивного самолета соответственно при выполнении технологии ВВП и зависании, их авторотации или фиксации СЛК ОНВ на концах ВСК позволит самолетам-вертолетам оптимизировать эксплуатационные характеристики в различных режимах их полета, увеличить скорость и дальность полета и, как следствие, повысить топливную эффективность. Поэтому для реализации данных эксплуатационных характеристик необходимо исследовать индивидуальные принципы фиксации лопастей-крыльев ОНВ с их противовесами, такие как преобразование на режимах перехода с вертолета в конфигурацию самолета - одновременная остановка наружу от оси симметрии лопастей-крыльев двух ОНВ, так и последующей их жесткой фиксации на концах ПСК, увеличивая и достигая в 1,43 и 10,6-11,7 раза удлинение (λ) ПСК и ССРК. Это снизит индуктивное их сопротивление, а использование конструкции жесткого крепления лопастей ОНВ и их противовесов при их преобразовании в СЛК, но и новейших композиционных материалов, особенно, совместное их применение обеспечит требуемый уровень усовершенствований, которые, имея новизну, изначально являются патентоспособными. При широком использовании в комбинированной СУ ГРСВ два КГтД на базе высотных турбовальных двигателей (ТВаД), выполненных в виде двухконтурных двигателей с ВОВ, используя в конструкции последних вентиляторы ТРДД от РД-79-300 и ПС-90А, позволит весьма сократить сроки их освоения.
Несомненно, с течением времени широкое использование в СУ ВОВ в ПРС-R2 позволит добиться повышения скорости и дальности полета в сравнении с конвертопланом V-22 «Osprey», что немаловажно для без аэродромного базирования освоения и ГРСВ-5,4, и тяжелого реактивного самолета-вертолета (ТРСВ), снабженного в СУ четырьмя вертолетными ТВаД типа ПВД-5000 мощностью по 5000 л.с. Использование последних при диаметре двух ОНВ DОНВ=19,0 м (что в 1,68 раза меньше, чем у вертолета Ми-26), особенно, в ТРСВ-10,0 позволит при взлетном его весе 42 тонн и удельной нагрузке на мощность 2,1 кг/л.с. достичь скорости 550/770 км/ч, дальности полета до 4235/2772 км и топливной эффективности 31,67/25,53 г/пас⋅км в полетной конфигурации крылатого автожира/реактивного самолета при его ЦН=10,4 тонн. 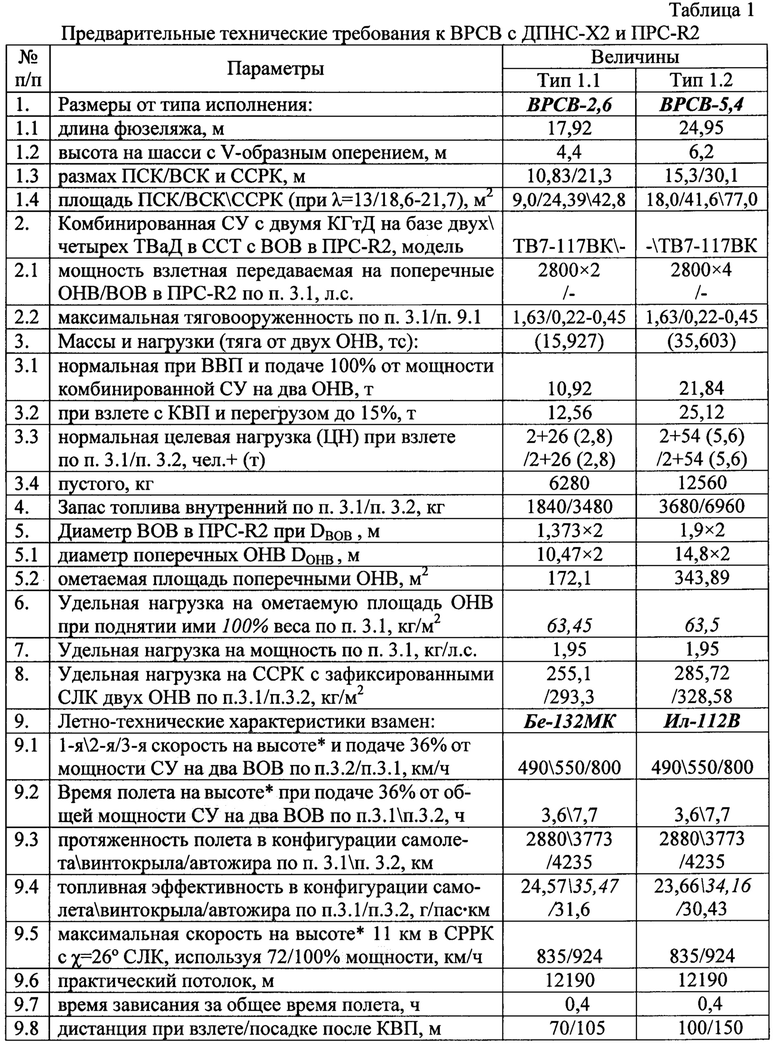
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| ВЫСОКОСКОРОСТНОЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2706294C1 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ САМОЛЕТОМ-ВЕРТОЛЕТОМ | 2018 |
|
RU2710317C1 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ СИСТЕМ КОРАБЕЛЬНО-АВИАЦИОННЫХ РАКЕТНЫХ | 2020 |
|
RU2748042C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Гибридный реактивный самолет-вертолет (ГРСВ) выполнен по двухвинтовой поперечно-несущей схеме (ДПНС), содержит трансмиссию и двигатели силовой установки (СУ), приводящие несущие винты (НВ), размещенные на консолях крыла, турбореактивные двигатели, установленные под крылом, для создания маршевой тяги, имеет фюзеляж, хвостовое оперение и трехопорное убирающееся колесное шасси. ГРСВ имеет на консолях дупланных крыльев однолопастные несущие винты (ОНВ), V-образное оперение и свободные силовые турбины в подкрыльных гондолах, приводящие поперечные ОНВ и в кольцевых обтекателях выносные вентиляторы, создающие при вертикальном и коротком взлете/посадке (ВВП и КВП) пропульсивно-реактивную тягу, направленную горизонтально назад с работающими или авторотирующими ОНВ или зафиксированными их лопастями-крыльями над первым крылом при горизонтальном полете в конфигурации реактивных винтокрыла, крылатого автожира или самолета дупланной схемы. Обеспечивается повышение скорости и дальности полета, уменьшение вибраций и исключение возникновения резонанса в конфигурации автожира с авторотирующими ОНВ. 4 з.п. ф-лы, 1 табл., 1 ил.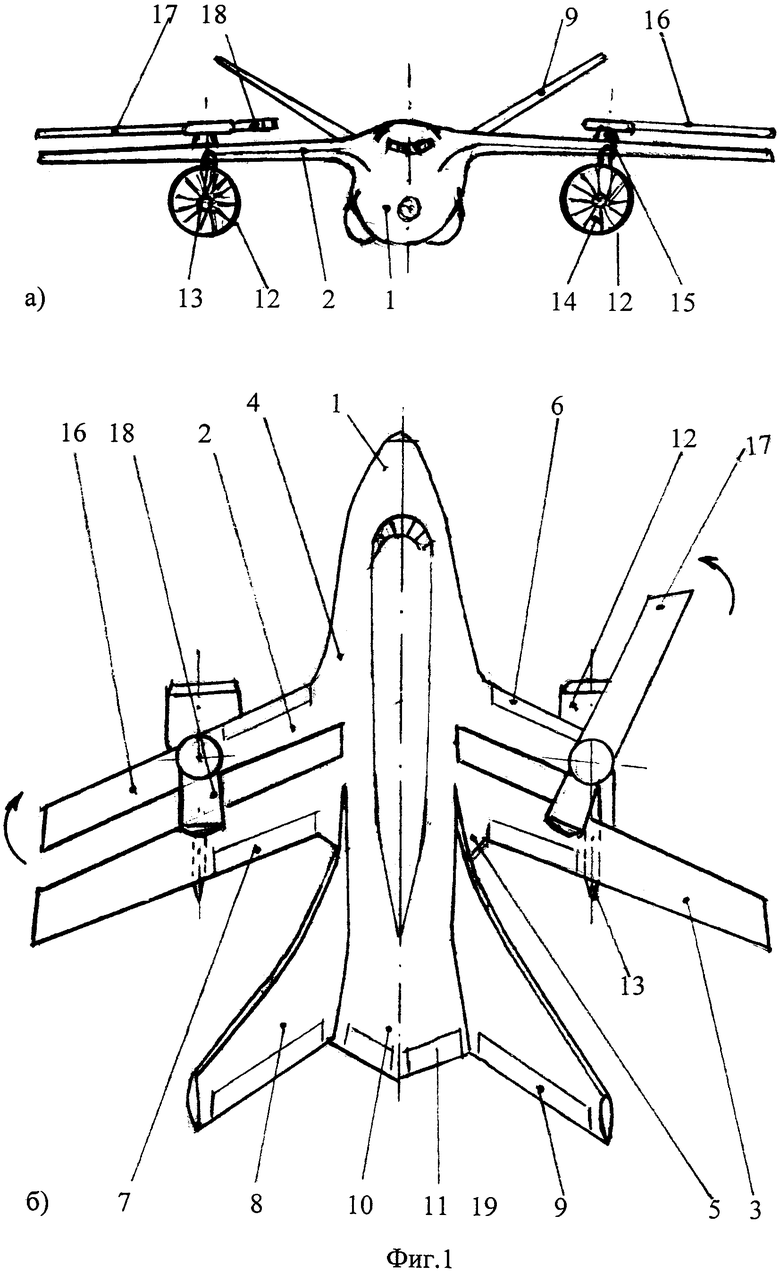
1. Гибридный реактивный самолет-вертолет, выполненный по двухвинтовой поперечно-несущей схеме (ДПНС), содержит трансмиссию и двигатели силовой установки (СУ), приводящие несущие винты (НВ), размещенные на концах крыла, турбореактивные двигатели для создания маршевой тяги, имеет фюзеляж, хвостовое оперение и трехопорное убирающееся колесное шасси, отличающийся тем, что он в интегральной аэродинамической схеме снабжен как несущим фюзеляжем, носовая часть которого плавно сопряжена с вихреобразующими передними наплывами, имеющими угол стреловидности и атаки отличными от крыла, увеличивающими на больших углах атаки несущую его способность, распространяющимися от передней кромки крыла и, отклоняясь к носовой части фюзеляжа, образуют в плане V-образную с округленной вершиной конфигурацию, так и не менее чем парой комбинированных газотурбинных двигателей (КГтД), левый и правый из которых установлен в гондоле на подкрыльном пилоне и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с выносным однорядным вентилятором (ВОВ) в кольцевом обтекателе и по меньшей мере одной свободной силовой турбиной (ССТ), передающей взлетную мощность комбинированной силовой установки (СУ) посредством системы трансмиссии на соответствующие однолопастные НВ (ОНВ) в симметрично-сбалансированной упомянутой ДПНС-Х2 и/или ВОВ, имеющим лопатки с большой их круткой, работающим по тянущей схеме, установленным перед и соосно с промежуточным редуктором для создания, например, в пропульсивно-реактивной системе (ПРС-R2) синхронной реактивной тяги горизонтально назад и параллельно оси симметрии при вертикальном и коротком взлете/посадке (ВВП и КВП) или горизонтальном поступательном полете, но и в дупланной аэродинамической схеме оснащен низко- или высокорасположенными с положительным или отрицательным углом (ϕ) поперечного V и разновеликими по размаху первым и вторым стреловидными крыльями (ПСК и ВСК), имеющими соответственно большое удлинение λ=13,0 и λ=18,6-21,7, размах в 1,03 и 2,03 раза больше диметра (D) ОНВ и угол стреловидности, например, χ=+23° или χ=+26°, интегрированными с подкрыльными пилонами, смонтированными на конце первого ПСК, конструктивно объединяющим ПСК с ВСК, и выполнен с возможностью преобразования полетной его конфигурации после выполнения технологии короткого или вертикального взлета соответственно с винтокрыла или вертолета при максимальном или нормальном взлетном его весе в соответствующий скоростной крылатый автожир или реактивный самолет соответственно с ОНВ, смонтированными на надкрыльном пилоне, установленном на конце ПСК и интегрированном с подкрыльным пилоном, работающими на режимах их авторотации или в качестве несущих их стреловидных лопастей-крыльев (СЛК), образованных при фиксации ОНВ с их противовесами или трансформации их противовесов, осуществляемой на переходных режимах полета последовательно, когда после вертикального/короткого взлета, набора высоты и выполнения разгонного полета левый и правый ОНВ одновременно предварительно остановлены так, что их противовесы и лопасти зафиксированы в плане соответственно от конца ПСК вовнутрь к и наружу от оси симметрии или при остановленных СЛК их профилированные противовесы снабжены автоматическими узлами синхронного их складывания посредством поворота на соответствующие углы 113° или 116° в горизонтальной плоскости и их размещения параллельно оси симметрии при фиксировании с соответствующей стреловидностью по передней кромке СЛК левого и правого ОНВ, которые имеют противоположное направление их вращения соответственно по часовой и против часовой стрелки и обеспечивают с ПСК и ВСК равновеликую стреловидность χ=+23° или χ=+26° и организуют соответственно синхронно-симметричные несущие поверхности их СЛК в полетной конфигурации реактивного или трансзвукового самолета с ПРС-R2 и с системой ступенчатых разноуровневых крыльев (ССРК), преобразующей удлинение ПСК с λ=13,0 до большого удлинении ВСК с удлинением λ=17,6…21,7 и включающей при виде спереди с ярусным размещением на концах ПСК наружу от него зафиксированные широкохордовые СЛК ОНВ, выполняющие роль внешних верхних секций ПСК, но и обратно, при этом в системе трансмиссии каждый КГтД с кольцевым обтекателем ВОВ содержит, например, две ССТ, снабженные передним выводом вала для отбора взлетной их мощности, смонтированные по обе стороны от подкрыльного пилона в подкрыльной гондоле, в которой между ВОВ и ССТ смонтирован Т-образный как при виде сверху, так и сбоку промежуточным редуктор, имеющий продольные входные валы от двух ССТ и выходные как передний, так и верхний валы, первый из которых передает мощность через муфту сцепления на ВОВ, а второй - передает через муфту сцепления крутящий момент на соответствующий входной вал консольного редуктора ОНВ, размещенный в надкрыльном пилоне, имеет выходной вертикальный вал, который равноудален в плане от центра масс и отклонен как назад по полету на угол (α), который при его размещении параллельно плоскости симметрии при виде спереди равен 1/2 или равновелик величине угла атаки (α) соответственно ПСК или ВСК, так и к плоскости или наружу от плоскости симметрии на угол (ϕ), который равновелик величине угла (ϕ) поперечного V соответственно ПСК или ВСК.
2. Гибридный реактивный самолет-вертолет по п. 1, отличающийся тем, что набегающий поток при вертикальном и горизонтальном режимах полета встречают одновременно соответственно передние кромки наступающих лопастей ОНВ в упомянутой ДПНС-Х2 и зафиксированные их упомянутые СЛК, преобразующие дупланную схему с упомянутым разновеликим размахом ПСК и ВСК в упомянутую ССРК с равновеликим их размахом при совместном большом удлинении ССРК, соответствующем величине λ=10,6…11,7, причем при выполнении технологии КВП и горизонтального поступательного полета в конфигурации винтокрыла, крылатого автожира или самолета с упомянутыми ПСК и ВСК, внутренние межгондольные секции которых снабжены соответственно предкрылками и закрылками, а роль элеронов выполняют авторотирующие ОНВ или зафиксированные упомянутые их СЛК посредством соответствующего изменения циклического шага соответствующих ОНВ или дифференциальным изменением угла установки соответствующих лопастей ОНВ, при этом на режимах ВВП и зависания в упомянутой ДПНС-Х2 ее упомянутые ОНВ, выполненные с жестким креплением их лопастей и автоматом их перекоса, обеспечивающие изменение балансировки по тангажу, курсу и крену, которое создается изменением соответствующего циклического шага и дифференциальным изменением тяги посредством общего шага двух ОНВ соответственно, причем хвостовая балка на ее конце снабжена профилированным обтекателем, который, образуя несущую поверхность, имеет как V-образную в плане заднюю кромку, так и интегрирован по внешним его бортам со стреловидными килями V-образного оперения, имеющими при виде сбоку серповидные законцовки и форкили, которые распространяются вперед за заднюю кромку ВСК, выполняя с внешних бортов фюзеляжа роль верхних стреловидных гребней, нижние части которых для направления воздушного потока интегрированы с верхней частью фюзеляжа и размещены в плане параллельно к оси симметрии, при этом передняя часть фюзеляжа, имеющая снизу к носовому обтекателю возвышающий ее скос, угол которого при виде сбоку равновелик или равен 1/2…1/3 величине угла возвышающего скоса к высокорасположенной хвостовой балке на конце фюзеляжа, имеющего овальное сечение, которое в его центре выполнено в виде круга, снабженного диаметрально расположенными по его внешним бортам и сверху соответствующего диаметра полукругами, верхний меньший полукруг из которых, размещаясь от носовой части фюзеляжа до обтекателя центроплана ВСК, образует поперечное сечение с верхней треугольно подобной округлой конфигурацией, сужающейся на ее конце при виде сверху, распространяющейся до форкилей и создающей совместно с их стреловидными гребнями, смонтированными в плоскости килей V-образного оперения, как улучшение направления потока низкоэнергетического пограничного слоя над фюзеляжем, достигая ламинарного его обтекания, так и уменьшение полного сопротивления на 9%, причем на режимах ВВП и зависания при удельной нагрузке на мощность СУ, составляющей ρN=1,95 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,63, включает как режим ее работы при отборе 100%, так и 75% или 50% взлетной ее мощности на привод упомянутых ОНВ соответственно как от четырех работающих ССТ, так и от трех или двух работающих ССТ соответственно при отказе ССТ в одной гондоле с любой стороны или двух ССТ из противоположных гондол, но и, например, даже в последнем случае после автоматического включения чрезвычайного режима (ЧР) работы двух оставшихся в работе ССТ, которые при удельной вертикальной тяговооруженности упомянутой ДПНС-Х2, составляющей ρВТ=1,19 или ρВТ=1,075, обеспечат два режима аварийной вертикальной посадки в течение 2,5 минут или 30 минут соответственно, при этом на режимах ВВП и зависания в каждой ССТ система УФБП, содержащая: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения и фюзеляжа, и дисков вращения упомянутых ОНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего его безопасного снижения; компьютер управления полетом, расположенный в его бортовой системе управления (БСУ) и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между фюзеляжем с его колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию фюзеляжа и несущей его системы с выбранной относительной его позицией; определить скорость управляемого снижения, необходимую для его перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить прямое управляемое безопасное снижение в выбранное относительное положение через входы управления полетом.
3. Гибридный реактивный самолет-вертолет по п. 2, отличающийся тем, что упомянутая система УФБП с одним или несколькими датчиками включают в себя один или несколько ИК-датчиков, видеодатчиков, радиолокационных, лазерных и ультразвуковых датчиков, и датчиков глобального позиционирования, при этом упомянутый компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков и каналом передачи данных, расположенным на его планере для получения глобальных данных о местоположении посредством приема его БСУ данных сигналов спутниковой навигационной системы ГЛОНАСС, так и с возможностью преобразования изображений с каждого видеодатчика, обеспечивающего определение относительного положения, которое посредством триангуляции включает в себя определение относительного диапазона, азимута и угла места, причем компьютер суммирования данных полностью интегрирован в интерфейс пилота и его БСУ, обеспечивающей упомянутое следящее его безопасное снижение, которое по необходимости может быть отключено посредством одного из входов интерфейса пилота для управления полетом, активации пилотом кнопки или переключателя управления, при этом компьютер суммирования данных дополнительно снабжен возможностью его независимого действия, определяющего то, что полет небезопасен для относительного его положения относительно уровня земли или поверхности посадочной площадки, но и отключающего формирование упомянутого прямого управляемого безопасного снижения через компьютер управления полетом.
4. Гибридный реактивный самолет-вертолет по любому из пп. 1, 2, отличающийся тем, что для барражирующего экономичного скоростного горизонтального полета каждый ОНВ в синхронно-сбалансированной несущей и авторотирующей системе, включающей в каждом упомянутом консольном редукторе автоматическую коробку передач, имеющую для привода ОНВ упомянутый вертикальный выходной вал, который создает по два потока: первый - взлетный с выдачей соответствующей мощности от упомянутых КГтД и созданием подъемной силы от ОНВ, второй - крейсерский в конфигурации крылатого автожира с приемом мощности от авторотации соответствующего ОНВ на ее соответствующую ступень, отключающую консольный редуктор от трансмиссии, приводящую генератор и управляющую синхронным снижением скорости их вращения, например, до 200 мин-1 или 100 мин-1, углом атаки лопастей авторотирующих ОНВ, обеспечивающих долю увеличения в 1/3-1/4 раза требуемой подъемной силы упомянутых ПК и ЗСК, но и плоскостью вращения лопастей ОНВ, которые почти выровнены с соответствующим воздушным потоком на скоростях для мало- или скоростного полета, приводящим к уменьшению вращательного сопротивления ОНВ на 12-15% от общего сопротивления профиля лопастей ОНВ при их самовращении и возможности для режимов крейсерского полета расчета упомянутых ПСК и ЗСК с уменьшенной их геометрией, составляющей 2/3-3/4 от габаритов крыла аналогичного самолета, при этом для высокоскоростного горизонтального полета в упомянутой комбинированной СУ, достигая маршевой тяговоуроженности до 0,23 и 0,3, используется 36% и 54% мощности при удельной нагрузке на нее ρN=1,95 кг/л.с. соответственно от двух и трех работающих упомянутых КГтД и только на привод их ВОВ в конфигурации упомянутого реактивного самолета дупланной схемы.
5. Гибридный реактивный самолет-вертолет по любому из пп. 1, 2, отличающийся тем, что для высокоскоростного горизонтального полета в упомянутой комбинированной СУ, достигая маршевой тяговоуроженности с 0,3 до 0,363, используется взлетная ее мощность с 54% до 72% соответственно от трех и четырех работающих упомянутых КГтД и только на привод упомянутых ВОВ в конфигурации упомянутого трансзвукого самолета дупланной схемы, упомянутая ССРК которого, имея по передней ее кромке стреловидность с углом χ=+26° или χ=+30°, обеспечивает на высоте 11 км скорость полета 0,753 Маха (М) или М=0,786, а при достижении маршевой тяговоуроженности до 0,45 скорость полета при пикировании повышается до М=0,786 или М=0,87 соответственно.
| CN 103723272 A, 16.04.2014 | |||
| ПНЕВМАТИЧЕСКОЕ НОРМАЛЬНО ЗАМКНУТОЕ РЕЛЕ СИГНАЛИЗАЦИИ | 0 |
|
SU168554A1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| US 20070095969 A1, 03.05.2007. | |||

