Область техники
Предлагаемое изобретение относится к устройству согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
Устройство подобного рода раскрыто в патентной заявке ЕР 1961288 А1. Эта заявка описывает устройство дополнительного ускорения, выполненное в виде пневматического транспортера самоходного полевого измельчителя и частично окруженное корпусом. Устройство дополнительного ускорения приводится в действие ременным шкивом, установленным на ось устройства дополнительного ускорения, проходящую по всей ширине корпуса. Устройство дополнительного ускорения установлено с возможностью смещения относительно корпуса. Для этого к корпусу присоединен механизм перемещения, который входит в зацепление с устройствами скольжения, расположенными на концах оси. Механизм перемещения содержит две соединительные тяги, каждая из которых входит в зацепление с устройством скольжения и соединяет его с эксцентриковым валом. Эксцентриковый вал перемещают при помощи телескопического исполнительного механизма, соединенного с центром вала. Поворотное движение эксцентрикового вала преобразуется в поступательное движение устройств скольжения, что позволяет перемещать устройство дополнительного ускорения.
Недостаток устройства подобного рода заключается в сложной конструкции механизма перемещения, который вследствие обилия мест соединения отличается увеличенным люфтом, что, по меньшей мере, затрудняет точную установку положения.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является такое усовершенствование устройства подобного рода, которое обеспечит точную регулировку положения устройства дополнительного ускорения.
Согласно изобретению, эту задачу решают отличительными признаками, раскрытыми в пункте 1 формулы изобретения.
Выгодные варианты исполнения изобретения раскрыты в зависимых пунктах формулы.
Согласно пункту 1, ось вращения опирается с возможностью вращения на кронштейны подшипников, расположенные на ее концах, а кронштейны подшипников одним концом установлены на корпусе с возможностью поворота вокруг оси поворота, а противоположным свободным концом соединены с исполнительным механизмом. Такая конструкция выгодна тем, что для реализации движения, необходимого для перемещения устройства дополнительного ускорения, опирающегося на кронштейны подшипников, на корпусе необходимо предусмотреть только два места соединения / зацепления. Движение исполнительного механизма непосредственно переходит в движение соответствующего кронштейна подшипника. Уменьшение количества деталей, взаимодействующих при перемещении устройства дополнительного ускорения, позволяет обеспечить прямое и точное перемещение.
Предпочтительно, кронштейны подшипников могут представлять собой литые детали.
В частности, каждый конец оси вращения может входить в корпус подшипника, являющийся составной частью соответствующего кронштейна подшипника. Исполнение кронштейна и корпуса подшипника в виде цельной литой детали упрощает изготовление и удешевляет производство.
В предпочтительном варианте осуществления соответствующий исполнительный механизм может быть выполнен в виде ходового винта, удерживаемого крепежным модулем с возможностью перемещения относительно корпуса. Исполнительный механизм, представляющий собой механическое устройство перемещения, является недорогим и конструктивно простым вариантом. При этом оператор приводит его в действие вручную.
Для этого крепежный модуль может содержать опорную пластину с расположенным на ней регулировочным элементом, содержащим участок с внутренней резьбой для приема резьбовой штанги, зажатой зажимной пластиной между этой пластиной и стойкой подшипника. За счет зажимания опорной пластины между стойкой подшипника и зажимной пластиной в каждый момент времени гарантируется восприятие сил сжатия и растяжения, развиваемых транспортируемой убранной культурой и приводным ремнем и воздействующих на устройство дополнительного ускорения. Опорная пластина с установленным на ней регулировочным элементом обеспечивает линейное перемещение устройства дополнительного ускорения.
В альтернативном варианте осуществления соответствующий исполнительный механизм может быть выполнен в виде гидравлического подъемного цилиндра. Этот вариант осуществления позволяет автоматизировать перемещение устройства дополнительного ускорения. При этом оба подъемных цилиндра можно активизировать независимо друг от друга. Вместо гидравлического подъемного цилиндра можно использовать другой исполнительный механизм, выполненный в виде линейного привода, например, электродвигатель.
Выгодным образом, подъемные цилиндры могут быть соединены, по меньшей мере, с одним редукционным клапаном. Редукционный клапан можно использовать в качестве блока перегрузки, срабатывающего при возникновении в канале транспортировки убранной культуры перегрузки, обусловленной чрезмерным количеством убранной культуры, и позволяющего осуществить компенсирующее перемещение устройства дополнительного ускорения путем увеличения расстояния до стенки.
Предпочтительно, подъемные цилиндры могут быть гидравлически соединены по схеме «ведущий-ведомый». Исполнение пары подъемных цилиндров по схеме «ведущий-ведомый» выгодно тем, что оно обеспечивает синхронное перемещение обоих подъемных цилиндров.
Кроме того, к соответствующему кронштейну подшипника может быть присоединен датчик угла поворота. Эта конструкция выгодна тем, что в ней реализована резервная защита. Кроме того, устройство дополнительного ускорения после выполнения компенсирующего перемещения, обусловленного возникшей перегрузкой, может быть снова возвращено в исходное положение.
В следующем предпочтительном варианте осуществления изобретения участок корпуса, открытый по периметру устройства дополнительного ускорения, может быть закрыт стенкой, которая установлена на определенном расстоянии до устройства дополнительного ускорения, и на которую помещен, по меньшей мере, один акустический датчик.
-
Краткое описание чертежей
На фигурах изображено:
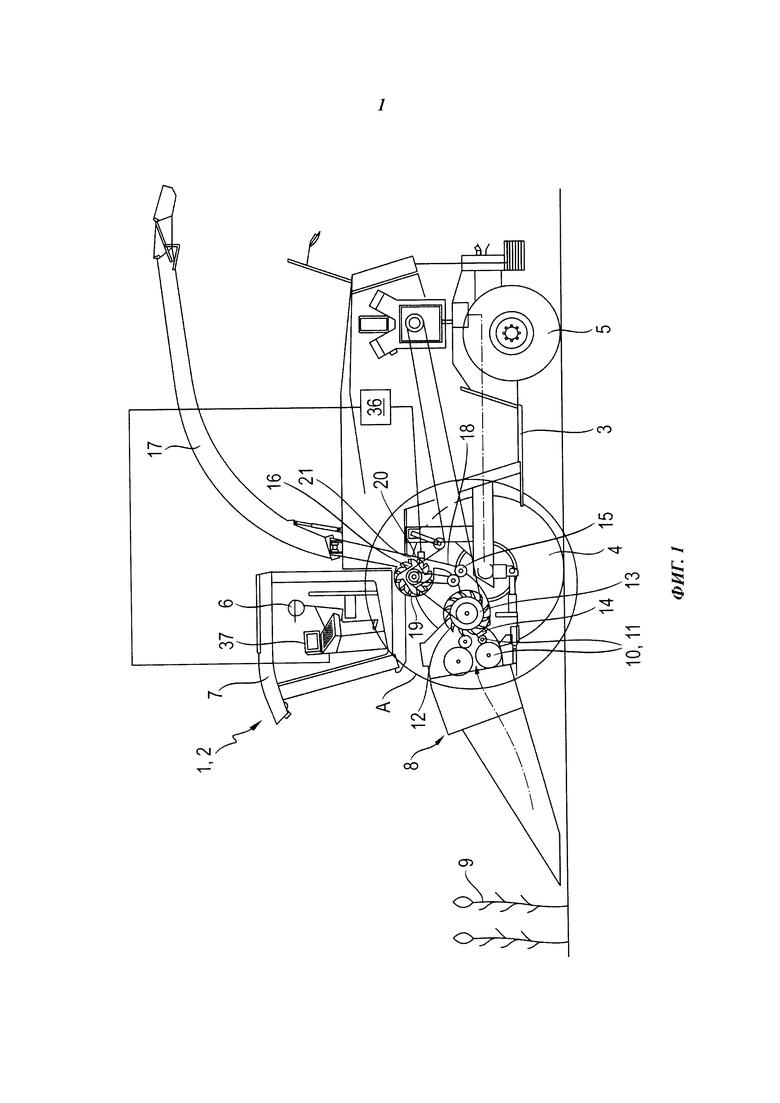
Фигура 1: самоходный полевой измельчитель, вид сбоку.
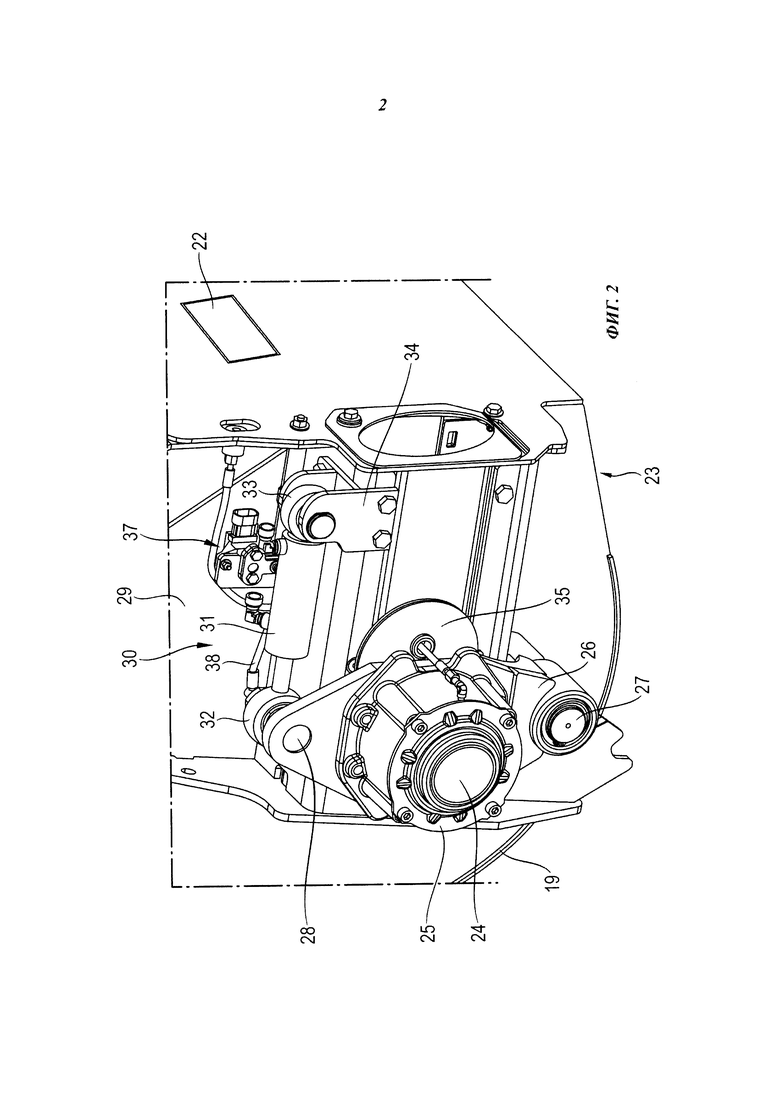
Фигура 2: фрагмент корпуса, частично окружающего устройство дополнительного ускорения полевого измельчителя, согласно первому варианту осуществления.
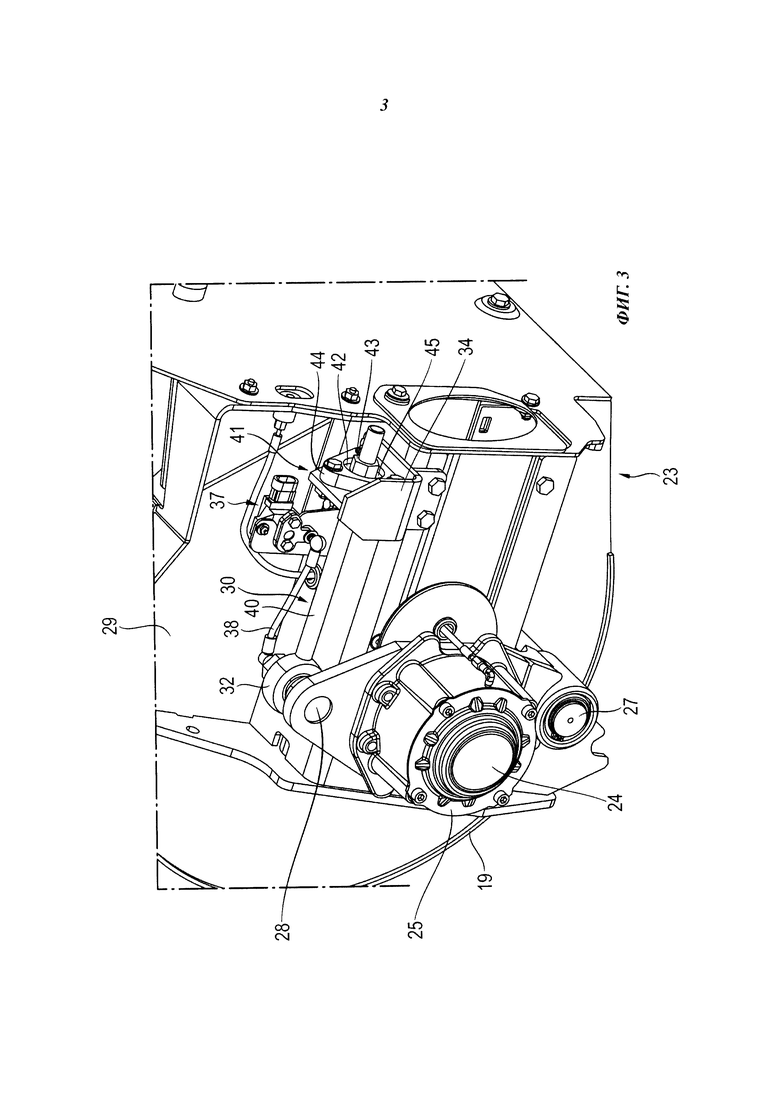
Фигура 3: фрагмент корпуса, частично окружающего устройство дополнительного ускорения полевого измельчителя, согласно второму варианту осуществления.
Осуществление изобретения
На фигуре 1 изображена сельскохозяйственная уборочная машина 2, выполненная в виде самоходного полевого измельчителя 1, в виде сбоку и в разрезе. Эта машина построена на раме 3, опирающейся на передние и задние колеса 4, 5. Полевым измельчителем 1 управляет оператор 6 при помощи устройства 37 ввода и отображения информации из кабины 7 оператора, из которой просматривается присоединенный к передней части полевого измельчителя 1 навесной агрегат 8, который во время работы полевого измельчителя 1 захватывает убираемую культуру 9, режет ее и подает на следующие за ним валики 10, 11 втягивания и предварительного прессования. Валики 10, 11 втягивания и предварительного прессования направляют убранную культуру 9 на расположенный далее вращающийся измельчающий барабан 13, оснащенный ножами 12 и измельчающий убранную культуру 9 на противорежущей пластине 14. Далее измельченную убранную культуру 9 можно направить на устройство 15 дополнительного измельчения, прежде чем передать на устройство 16 дополнительного ускорения. Устройство 15 дополнительного измельчения предназначено для раздавливания зерен кукурузы при уборке кукурузных початков. Поэтому устройство 15 дополнительного измельчения может оказаться полностью ненужным, если убранная культура 9, например, трава, не требует раздавливания. Устройство 16 дополнительного ускорения придает убранной культуре 9 ускорение, повышающее надежность выхода культуры из перегрузочного устройства 17, расположенного за устройством 16 дополнительного ускорения, в не показанное на фигуре транспортное средство.
Поток культуры движется внутри полевого измельчителя 1 по каналу транспортировки убранной культуры, ограниченному шахтой 18. Над устройством 15 дополнительного измельчения предусмотрен корпус 19, в котором находится устройство 16 дополнительного ускорения, и который расположен на шахте 18. Корпус 19 частично окружает устройство 16 дополнительного ускорения по периметру и открыт в направлении шахты 18, благодаря чему устройство 16 дополнительного ускорения может частично выступать в канал транспортировки убранной культуры. Напротив открытого участка корпуса 19 расположена стенка 20, выполненная в виде быстроизнашивающейся детали. Эта стенка 20 вместе с устройством 16 дополнительного ускорения ограничивает зазор 21 для прохождения культуры. Ширину зазора 21 для прохождения культуры можно регулировать путем перемещения устройства 16 дополнительного ускорения относительно стенки 20. На стороне стенки 20, противоположной устройству 16 дополнительного ускорения, расположен датчик 22, выполненный, предпочтительно, в виде датчика стука.
На фигуре 2 изображен фрагмент корпуса 19, окружающий устройство 16 дополнительного ускорения. Корпус 19 и расположенные на нем компоненты симметричны, то есть, в частности, описанные ниже компоненты, предназначенные для перемещения устройства 16 дополнительного ускорения, расположены на корпусе 19 зеркально симметрично.
На фигуре изображен корпус 16 с боковой стенкой 29 и расположенным рядом со стенкой 20 входным отверстием 23, через которое поступает убранная культура 9, подаваемая с устройства 15 дополнительного измельчения. Через корпус 19 проходит ось 24 вращения, на которую с возможностью вращения опирается устройство 16 дополнительного ускорения. Ось 24 вращения опирается на корпус 19 с возможностью вращения посредством корпуса 25 подшипника. Корпус 25 подшипника установлен на кронштейне 26 подшипника, выполненном, предпочтительно, в виде литой детали. В альтернативном варианте исполнения кронштейн 26 подшипника и корпус 25 подшипника могут быть выполнены в виде единой литой детали.
Кронштейн 26 подшипника проходит в радиальном направлении к оси 24 вращения. При этом один конец кронштейна 26 подшипника установлен с возможностью поворота вокруг оси 27 поворота. Ось 27 поворота закреплена на корпусе 19 без возможности проворачивания. На противоположном конце кронштейна 26 подшипника находится палец 28, проходящий в направлении боковой стенки 29 корпуса 19. На конец кронштейна 26 подшипника воздействует исполнительный механизм 30, позволяющий перемещать ось 24 вращения и, тем самым, устройство 16 дополнительного ускорения относительно стенки 20. На соответствующей боковой стенке 20 предусмотрена не показанная на фигуре выемка, делающая возможным перемещение устройства 16 дополнительного ускорения относительно корпуса 19. Эта выемка закрыта крышкой 35, препятствующей проникновению материала через открытые участки выемки в ту или другую сторону.
В варианте исполнения, показанном на фигуре 2, исполнительный механизм 30 выполнен в виде гидравлического цилиндра 31. На конце штока поршня находится ушко 32 штока, шарнирно соединенное с пальцем 28. На гидравлическом цилиндре 31 находится ушко 33 цилиндра, посредством которого гидравлический цилиндр 31 закреплен стойкой 34 подшипника на корпусе 19 с возможностью поворота вокруг оси. Как говорилось выше, конструкция зеркально симметрична, то есть, на противоположной стороне находится, в том числе, еще один гидравлический цилиндр 31. Такая конструкция позволяет активизировать оба гидравлических цилиндра 31 независимо друг от друга.
Также возможен вариант, в котором гидравлические цилиндры будут гидравлически соединены друг с другом по схеме «ведущий-ведомый». При выдвижении штоков поршней в цилиндрах нагнетается давление по соединительному трубопроводу со стороны поршня ведущего цилиндра. Посредством гидравлического масла, стекающего со стороны кольцевого поршня ведомого цилиндра, он активизирует ведомый цилиндр со стороны поршня, в результате чего оба гидравлических цилиндра 31 выдвигаются синхронно. При этом объем гидравлической жидкости со стороны кольцевого поршня ведущего цилиндра точно соответствует объему гидравлической жидкости со стороны поршня ведомого цилиндра. В конечном положении каждый раз происходит выравнивание объема гидравлической жидкости при помощи клапана в поршне ведущего цилиндра, что позволяет по-прежнему обеспечивать синхронный ход.
Выдвижение или втягивание гидравлического цилиндра 31 вызывает поворот кронштейна 26 подшипника вокруг оси 27 поворота в направлении стенки 19 или в направлении от стенки 19. Синхронное перемещение гидравлических цилиндров 31 позволяет непосредственно и точно регулировать или перемещать устройство 16 дополнительного ускорения относительно стенки 19. Внешняя окружность устройства 16 дополнительного ускорения находится на определенном минимальном расстоянии до стенки 20. Это минимальное расстояние определяет ширину зазора 21 для прохождения культуры, при которой может быть достигнуто максимально возможное ускорение убранной культуры 9. Предпочтительно, это минимальное расстояние может быть заложено в виде набора данных в устройство 36 управления полевого измельчителя 1. Если необходимо уменьшить дополнительное ускорение вследствие свойств убранной культуры, то устройство 16 дополнительного ускорения отодвигают с помощью исполнительного механизма 30 от стенки 20, что приводит к увеличению зазора 21 для прохождения культуры. Поворот устройства 16 дополнительного ускорения вокруг оси 27 поворота распознается с обеих сторон независимыми друг от друга датчиками 46 угла поворота, соединенными с устройством 36 управления. Устройство 36 управления анализирует сигналы датчиков 46 угла поворота и записывает соответствующие значения ширины зазора 21 для прохождения культуры в память устройства 36 управления. Таким образом, ширину зазора 21 для прохождения культуры можно определять или вызывать в каждый момент работы.
Соответствующий датчик 37 угла поворота соединен соединительной тягой 38 с концом кронштейна 26 подшипника, удаленным от оси 27 поворота. По существу, линейное движение, выполняемое при перемещении устройства 16 дополнительного ускорения, передается соединительной тягой 38 на датчик 37 угла поворота, соединенный с устройством 36 управления сигнальным проводом. Сигнал, отражающий движение, передается на устройство 36 управления для анализа.
Наличие редукционного клапана со встроенным предохранительным клапаном выгодно тем, что его можно использовать вместе с гидравлическими цилиндрами 31 в качестве защиты от перегрузки. Редукционный клапан измеряет гидравлическое давление, развиваемое гидравлическими цилиндрами 31 для противодействия усилию, развиваемому транспортируемой убранной культурой 9 и отклоняющему устройство 16 дополнительного ускорения от стенки 20. При превышении заданного порогового значения этого давления редукционный клапан активизируется таким образом, чтобы устройство 16 дополнительного ускорения выполнило уклоняющееся перемещение, увеличивающее расстояние до стенки 20. Это позволяет предотвратить повреждение устройства 16 дополнительного ускорения. Когда давление на редукционном клапане опустится ниже порогового значения, гидравлические цилиндры 31 автоматически вернут устройство 16 дополнительного ускорения в его исходное положение, определенное датчиками угла поворота.
Задачей датчика 22, выполненного, предпочтительно, в виде датчика стука, является упрощение регулировки устройства 16 дополнительного ускорения для оператора полевого измельчителя 1, за счет того, что он позволяет автоматизировать регулировку минимального расстояния между стенкой 19 и внешней окружностью вращающегося устройства 16 дополнительного ускорения. Устройство 16 дополнительного ускорения выполнено в виде вращающегося пневматического транспортера, оснащенного направляющими лопатками, распределенными по его периметру и проходящими в радиальном направлении. Эти направляющие лопатки вследствие контакта с убранной культурой подвержены повышенному износу, который приводит к изменению минимального расстояния между внешней окружностью и стенкой 20. Чтобы адаптировать это минимальное расстояние к обусловленному износом уменьшению внешней окружности, устройство 36 управления активизирует исполнительный механизм 30, выполненный в виде гидравлического цилиндра 31, таким образом, чтобы устройство 16 дополнительного ускорения перемещалось к стенке 20 до контакта с нею. Соприкосновение стенки 19 с устройством 16 дополнительного ускорения определяется датчиком 22, и на устройство 36 управления направляется соответствующий сигнал. Устройство 36 управления анализирует сигнал и соответствующим образом активизирует гидравлические цилиндры 31, чтобы прервать движение в направлении стенки 20. На следующем этапе устройство 36 управления активизирует гидравлические цилиндры 31 таким образом, чтобы заданное минимальное расстояние, записанное в устройство 36 управления, устанавливалось между стенкой 20 и внешней окружностью устройства 16 дополнительного ускорения. Этот процесс регулировки минимального расстояния можно выполнять как при сборке во время изготовления полевого измельчителя, так и в любой момент времени впоследствии, пока полевой измельчитель находится в режиме уборки урожая. В первом случае выполняют точную первичную настройку минимального расстояния с учетом возможных производственных допусков. Впоследствии учитывают износ направляющих лопаток. При необходимости, этот процесс может быть инициирован, например, оператором полевого измельчителя 1 при помощи ввода соответствующих данных на устройстве 37 ввода и отображения информации, например, сенсорном дисплее, терминале или клавиатуре, в кабине полевого измельчителя 1.
На фигуре 3 изображен альтернативный вариант исполнительного механизма 30, служащего для перемещения устройства 16 дополнительного ускорения. В этом варианте исполнения исполнительный механизм 30, установленный в соответствии с описанным ранее вариантом исполнения зеркально на корпусе 19, выполнен в виде резьбовой штанги 40. Резьбовая штанга 40 направляется по стойке 34 подшипника, с которой она соединена крепежным модулем 41. Крепежный модуль 41 содержит опорную пластину 42 в форме диска, на которой установлен регулировочный элемент 43 с участком внутренней резьбы, служащий гнездом и направляющей для резьбовой штанги 40. Опорная пластина 42 закреплена зажимной пластиной 44 на стойке 34 подшипника. Предпочтительно, зажимная пластина 44 имеет форму, по существу, равнобедренного треугольника, в центре которого предусмотрена выемка 45, через которую частями выступает резьбовая штанга 40. Зажимная пластина 44 окружает опорную пластину 42. Зажимную пластину 44 крепят винтами к стойке 34 подшипника. Для перемещения устройства 16 дополнительного ускорения винты, которыми зажимная пластина прикреплена к стойке 34 подшипника, ослабляют. Это позволяет изменять положение устройства 16 дополнительного ускорения путем приведения в действие регулировочного элемента 43, то есть, его перемещения / вращения относительно резьбовой штанги 40. В результате можно реализовать линейное перемещение устройства 16 дополнительного ускорения, не приводя в действие собственно резьбовую штангу 40. Зажимание опорной пластины 42 между зажимной пластиной 44 и стойкой 34 подшипника позволяет воспринимать усилия сжатия и растяжения, воздействующие на исполнительный механизм 30 во время работы устройства 16 дополнительного ускорения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 полевой измельчитель
2 уборочная машина
3 рама
4 колеса
5 колеса
6 оператор
7 устройство ввода и отображения
8 навесной агрегат
9 убранная культура
10 валик предварительного прессования
11 валик предварительного прессования
12 нож
13 измельчающий барабан
14 противорежущая пластина
15 устройство дополнительного измельчения
16 устройство дополнительного ускорения
17 перегрузочное устройство
18 шахта
19 корпус
20 стенка
21 зазор для прохождения культуры
22 датчик
23 входное отверстие
24 ось вращения
25 корпус подшипника
26 кронштейн подшипника
27 ось поворота
28 палец
29 боковая стенка
30 исполнительный механизм
31 гидравлический цилиндр
32 ушко штока поршня
33 ушко цилиндра
34 стойка подшипника
35 крышка
36 устройство управления
37 датчик угла поворота
38 соединительная штанга
40 резьбовая штанга
41 крепежный модуль
42 опорная пластина
43 регулировочный элемент
44 зажимная пластина
45 выемка
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ МЕТАТЕЛЯ В СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЕ | 2008 |
|
RU2446665C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2012 |
|
RU2593322C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2012 |
|
RU2596143C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2012 |
|
RU2583681C2 |
| СИСТЕМА ПОДЪЕМА ДЛЯ УБОРОЧНОЙ МАШИНЫ | 2012 |
|
RU2560848C1 |
| ПРИВОД ДЛЯ ПЕРЕГРУЗОЧНОГО УСТРОЙСТВА СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2511306C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2011 |
|
RU2565727C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2457662C2 |
| СПОСОБ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ, УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УБОРОЧНОЙ МАШИНЫ И УБОРОЧНАЯ МАШИНА | 2006 |
|
RU2405300C2 |
| РАБОЧАЯ СЕЛЬХОЗМАШИНА СО СМЕННЫМ АППАРАТОМ | 2011 |
|
RU2549104C2 |
Изобретение относится к сельскохозяйственному машиностроению. Полевой измельчитель содержит расположенное внутри него устройство дополнительного ускорения, выполненное в виде вращаемого вокруг оси вращения пневматического транспортера и частично окруженное частично открытым корпусом. Устройство дополнительного ускорения частично выступает в канал транспортировки убранной культуры с возможностью регулировки степени выступания путем перемещения устройства дополнительного ускорения относительно корпуса. Напротив открытого участка корпуса расположена стенка. Ось вращения пневматического транспортера опирается на кронштейны подшипников, расположенных на концах оси. Кронштейны подшипников одним концом установлены на корпусе с возможностью поворота вокруг оси поворота. Противоположный конец кронштейнов соединен с исполнительным механизмом. Изобретение обеспечивает точную регулировку положения дополнительного ускорения. 9 з.п. ф-лы, 3 ил.
1. Полевой измельчитель (1) с расположенным внутри него устройством (16) дополнительного ускорения, выполненным в виде вращаемого вокруг оси (24) вращения пневматического транспортера и частично окруженным частично открытым корпусом (19), которое частично выступает в канал транспортировки убранной культуры, причем обеспечена возможность регулировки степени выступания в канал транспортировки убранной культуры путем перемещения устройства (16) дополнительного ускорения относительно корпуса (19), и со стенкой (20), расположенной напротив открытого участка, отличающийся тем, что ось (24) вращения опирается с возможностью вращения на кронштейны (26) подшипников, расположенные на ее концах, при этом кронштейны (26) подшипников одним концом установлены на корпусе (19) с возможностью поворота вокруг оси (27) поворота, а противоположным свободным концом соединены с исполнительным механизмом (30).
2. Полевой измельчитель (1) по п. 1, отличающийся тем, что кронштейны (26) подшипников представляют собой литые детали.
3. Полевой измельчитель (1) по п. 2, отличающийся тем, что каждый конец оси (24) вращения входит в корпус (25) подшипника, являющийся составной частью соответствующего кронштейна (26) подшипника.
4. Полевой измельчитель (1) по одному из пп. 1-3, отличающийся тем, что соответствующий исполнительный механизм (30) выполнен в виде ходового винта (40), удерживаемого крепежным модулем (41) с возможностью перемещения относительно корпуса (19).
5. Полевой измельчитель (1) по п. 4, отличающийся тем, что крепежный модуль (41) содержит опорную пластину (42) с расположенным на ней регулировочным элементом (43), содержащим участок с внутренней резьбой для приема резьбовой штанги (40), которая зажата зажимной пластиной (44) между этой пластиной и стойкой (34) подшипника.
6. Полевой измельчитель (1) по одному из пп. 1-3, отличающийся тем, что соответствующий исполнительный механизм (30) выполнен в виде гидравлического подъемного цилиндра (31).
7. Полевой измельчитель (1) по п. 6, отличающийся тем, что подъемные цилиндры (31) соединены с по меньшей мере одним редукционным клапаном.
8. Полевой измельчитель (1) по п. 7, отличающийся тем, что подъемные цилиндры (31) гидравлически соединены по схеме «ведущий-ведомый».
9. Полевой измельчитель (1) по одному из пп. 1-3, 5, 7, 8, отличающийся тем, что к соответствующему кронштейну (26) подшипника присоединен датчик (46) угла поворота.
10. Полевой измельчитель (1) по одному из пп. 1-3, 5, 7, 8, отличающийся тем, что на стенку (20) установлен по меньшей мере один акустический датчик (22).
| US 7654068 B2, 02.02.2010 | |||
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ МЕТАТЕЛЯ В СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЕ | 2008 |
|
RU2446665C2 |
| РУКОЯТКА, ВИНТОВОЙ ДОМКРАТ И СПОСОБ ИЗГОТОВЛЕНИЯ ТАКОЙ РУКОЯТКИ | 2005 |
|
RU2378812C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ ПОЛОЖЕНИЯ ВСПОМОГАТЕЛЬНОГО МЕТАТЕЛЯ В СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЕ | 2003 |
|
RU2316168C2 |

