Область техники, к которой относится изобретение
Изобретение относится к системе управления перегрузочным устройством сельскохозяйственной уборочной машины в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Сельскохозяйственные уборочные машины, в особенности такие как самоходные полевые измельчители, во время своего рабочего хода по полю при уборке непрерывно выбрасывают убранную массу из перегрузочного устройства, называемого также разгрузочной трубой, в совместно движущееся транспортное средство, оснащенное грузовым контейнером. Поскольку расход движения убранной массы в полевых измельчителях и скорости движения машин по полю непрерывно возрастают, существует настоятельная потребность в обеспечении надежной и удобной перегрузки убранной массы.
Для обеспечения процесса перегрузки в различных условиях уборки и при различных ситуациях перегрузки самоходные полевые измельчители оснащены перегрузочным устройством, которое, как правило, установлено на раме машины с возможностью поворота вокруг вертикальной и горизонтальной осей. Перегрузочное устройство может поворачиваться вокруг вертикальной оси (боковая регулировка), например, с помощью поворотного круга и вокруг горизонтальной оси (регулировка по высоте), например, с помощью подъемного цилиндра. Уже эти две меры позволяют оказывать влияние на направление выброса убранной массы, которая выбрасывается через перегрузочное устройство в виде струи, чтобы в результате управлять положением точки падения струи убранной массы.
При описанном боковом или высотном регулировании перегрузочное устройство перемещается в целом, чтобы направлять струю убранной массы. Поэтому в силу инерции управление этого вида является довольно медленным по реакции. Вследствие этого вот уже многие годы перегрузочные устройства дополнительно снабжаются расположенным на дальнем от машины конце так называемым разгрузочным дефлектором, который направляет струю убранной массы непосредственно перед ее выходом из перегрузочного устройства. Дефлектор выполнен поворотным по высоте (вокруг одной или нескольких горизонтальных осей) с помощью исполнительного органа, например, исполнительного гидроцилиндра. Благодаря своей небольшой массе дефлектор позволяет оказывать влияние на направление выброса убранной массы с более коротким временем реакции и с более низкими затратами усилия на регулирование.
На практике при эксплуатации во время уборки существует проблема в том, что желаемая точка падения убранной массы может регулироваться точно только в ближней области к полевому измельчителю. Если для загрузки далеко находящегося грузового контейнера перегрузочное устройство поднято, а разгрузочный дефлектор широко открыт, то даже небольшое изменение угла установки дефлектора очень быстро приводит к потерям убранной массы, так как точка падения убранной массы уже при малом регулировании дефлектора смещается на несколько метров и может оказаться за пределами грузового контейнера. Неточное управление приводит также к перерегулированию, которое должно корректироваться соответствующими контрмерами (также неточными). Такое перерегулирование вызывает помехи как при ручном, так и при автоматическом приводе в действие разгрузочного дефлектора.
Подобные проблемы возникают также при повороте перегрузочного устройства (в целом) вокруг вертикальной и/или горизонтальной оси, так как здесь также управление желаемым положением точки падения вследствие неточности становится более трудным при увеличении дальности перегрузки.
Раскрытие изобретения
Соответственно, задачей изобретения является создание системы управления перегрузочным устройством указанного типа, с помощью которой струя убранной массы может управляться более точно, чтобы обеспечивать возможность более точного управления положением точки падения, в особенности в дальней области.
В соответствии с изобретением решение поставленной задачи достигается в системе по пункту 1 формулы изобретения. Система по изобретению отличается тем, что содержит средства для изменения регулировочной скорости позиционирования исполнительного органа в зависимости от достигнутой дальности выброса.
В основу решения по изобретению положено, прежде всего, знание того, что для перегрузочного устройства, выбрасывающего убранную массу в направлении выброса, которое может изменяться с помощью, по меньшей мере, одного исполнительного органа, управление положением желаемой точки падения имеет тем меньшую точность, чем дальше выбрасывается убранная масса, то есть чем больше достигнутая дальность выброса. Причина этого кроется в геометрической и кинематической структуре перегрузочного устройства и обычно приводит к тому, что регулирование отдельного исполнительного органа, такого как разгрузочный дефлектор (и/или мотор для бокового поворота перегрузочного устройства, и/или цилиндр изменения высотного положения перегрузочного устройства), при увеличении дальности выброса всегда сильнее влияет на перемещение точки падения убранной массы.
Решение по изобретению предусматривает возможность компенсации этого явления путем того, что предусмотрены средства, с помощью которых регулировочная скорость позиционирования исполнительного органа изменяется таким образом, что исполнительный орган перемещается со скоростью, адаптированной к дальности выброса. При этом предпочтительно адаптация производится динамически (в ходе эксплуатации), то есть непосредственно учитывает изменяющиеся условия перегрузки. За счет этого практически реализуется адаптированная реакция на управление путем того, что направление выброса убранной массы может изменяться с различной интенсивностью (скоростью позиционирования) в зависимости от текущей дальности выброса. При этом под дальностью выброса имеется в виду расстояние между местом установки перегрузочного устройства на раме уборочной машины и достигнутой точкой падения убранной массы, например, в грузовой контейнер. Система управления по изобретению может, например, обеспечивать то, что при большой дальности выброса достижение желаемой точки падения убранной массы может производиться с точностью, сравнимой с точностью для малой дальности выброса. Таким образом, при ручном приводе в действие исполнительного органа система создает для пользователя большее удобство обслуживания. За счет повышенного качества управления могут эффективно устраняться потери убранной массы. Кроме того, устраняется перерегулирование как при ручном управлении, так и в рамках автоматического процесса регулирования. В результате достигается решение поставленной задачи.
Дальность выброса может восприниматься с помощью известных устройств. В оптимальном решении такое устройство связано с устройством управления, которое выполнено с возможностью привода в действие для изменения скорости позиционирования исполнительного органа в зависимости от воспринятой дальности выброса. Для этого устройство управления подает соответствующий сигнал на исполнительный орган, так что он действует с измененной скоростью.
Устройство для восприятия дальности выброса может действовать на основе различных принципов. Согласно возможному примеру выполнения оно привлекает для этого известные параметры машины, например, положение перегрузочного устройства (которое может восприниматься, помимо прочего, с помощью поворотных потенциометров для восприятия высоты разгрузочной трубы, поворота разгрузочной трубы, установки дефлектора) ускорение выброса убранной массы (число оборотов и/или размер прохода метателя, число оборотов измельчительного аппарата и т.д.) и/или параметры убранной массы (влажность, вид культуры и т.д.), чтобы на их основе косвенным путем вычислять достигнутую дальность выброса.
Согласно предпочтительно решению по развитию системы устройство для восприятия достигнутой дальности выброса содержит, по меньшей мере, один оптический датчик, который служит для восприятия точки падения убранной массы. При этом предпочтительно речь идет о камере или системе камер, которая расположена и направлена таким образом, чтобы оптически воспринимать точку падения струи убранной массы. На основе известной как таковой обработки изображений камеры можно выводить по ним дальность выброса. Система камер может быть расположена, например, на самой уборочной машине и/или на перегрузочном устройстве и/или на грузовом контейнере. Для получения из изображений информации о расстоянии предпочтительно используется стереокамера.
Предпочтительно устройством управления является электронный процессор сигналов, который может оценивать входящие сигналы с высокой частотой дискретизации и обрабатывать их, чтобы выполнять быстрое управление, по меньшей мере, одним исполнительным органом. Согласно предпочтительному примеру осуществления устройство управления выполнено с возможностью привода в действие, чтобы снижать скорость исполнительного органа при увеличении дальности выброса и повышать ее при уменьшении дальности выброса. Благодаря такой адаптации регулировочной скорости позиционирования исполнительного органа выгодным образом достигается точное направление убранной массы даже при большой дальности выброса. Она способствует также устранению перерегулирования.
В предпочтительном решении по развитию системы по изобретению предусмотрено, что для исполнительного органа предназначен силовой орган с бесступенчато изменяемой скоростью позиционирования. При этом скорость позиционирования может регулироваться и динамически бесступенчато адаптироваться к текущей дальности выброса. Предпочтительно устройство управления выдает на силовой орган соответствующие сигналы регулирования. Возможны различные типы силового органа или органов, которые могут приводиться в действие с бесступенчато изменяемой скоростью. Предпочтительным типом является гидравлический силовой орган.
Управление исполнительным органом может осуществляться различным ч образом. Согласно предпочтительному примеру осуществления системы по изобретению устройство управления выполнено с возможностью привода в действие, чтобы адаптировать скорость исполнительного органа таким образом, что при приводе в действие исполнительного органа точка падения убранной массы перемещается с неизменной скоростью. Такой вид управления создает для оператора большое удобство, особенно при ручном приводе в действие исполнительного органа, поскольку при этом оператор управляет перемещением точки падения с одной и той же эффективной скоростью независимо от текущей дальности выброса. При этом для оператора создается высокая надежность обслуживания, способствующая упрощению процесса перегрузки при изменяющейся дальности выброса.
Далее, в предпочтительном примере осуществления для устройства управления может быть предназначен операторский терминал, с помощью которого может предварительно задаваться скорость перемещения точки падения. Таким путем при управлении оператором может быть предварительно выбрана чувствительность реакции, так что желаемая скорость перемещения точки падения может быть предварительно выбрана, например, независимо от опытности оператора или независимо от величины подлежащего заполнению грузового контейнера. Для этого операторский терминал может быть снабжен, например, поворотным регулятором, несколькими кнопками выбора или подобными элементами.
Как уже было упомянуто вначале, предусмотренный изобретением принцип адаптации скорости позиционирования к дальности выброса может использоваться применительно к различным исполнительным органам перегрузочного устройства, которые влияют на направление выброса убранной массы. Следует заметить, что положительный эффект может быть получен для единичного исполнительного органа или для нескольких исполнительных органов (в их комбинации).
Согласно предпочтительному решению по развитию изобретения, по меньшей мере, одним исполнительным органом является перемещаемый посредством силового органа разгрузочный дефлектор, с помощью которого можно оказывать влияние на угол выброса выходящей убранной массы к горизонтальной плоскости.
Альтернативно или дополнительно перегрузочное устройство установлено с возможностью поворота вокруг вертикальной оси и/или вокруг горизонтальной оси относительно рамы уборочной машины, причем для соответствующего поворота перегрузочного устройства служит силовой орган. В контексте изобретения это силовой орган или органы могут рассматриваться как исполнительные органы, так как они тоже влияют на направление выброса убранной массы.
Основной принцип изобретения применим к различным видам привода исполнительного органа в действие. Положительный эффект обеспечивается, когда исполнительный орган может приводиться в действие оператором вручную, с помощью операторского терминала. В этом случае за счет адаптации скорости позиционирования к дальности выброса исполнительного органа система по изобретению обеспечивает облегчение обслуживания и освобождение оператора от нагрузки.
Кроме того, система может эффективно использоваться, когда исполнительный орган приводится в действие в рамках автоматического процесса регулирования позиционирования струи убранной массы. В этом случае за счет точного перемещения точки падения в дальней области система обеспечивает устранение перерегулирования, которое могло бы приводить к неудовлетворительным контрмерам, колебаниям и в конечном счете к нестабильности системы регулирования.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будет подробно описан пример осуществления изобретения. Из описания будут ясны другие особенности и преимущества изобретения. На чертежах:
фиг.1 схематично изображает самоходный полевой измельчитель на виде сбоку,
фиг.2 изображает на виде сбоку перегрузочное устройство при выбросе убранной массы при различных положениях разгрузочного дефлектора,
фиг.3 изображает на виде сверху полевой измельчитель при выбросе убранной массы при различных положениях поворота перегрузочного устройства.
Осуществление изобретения
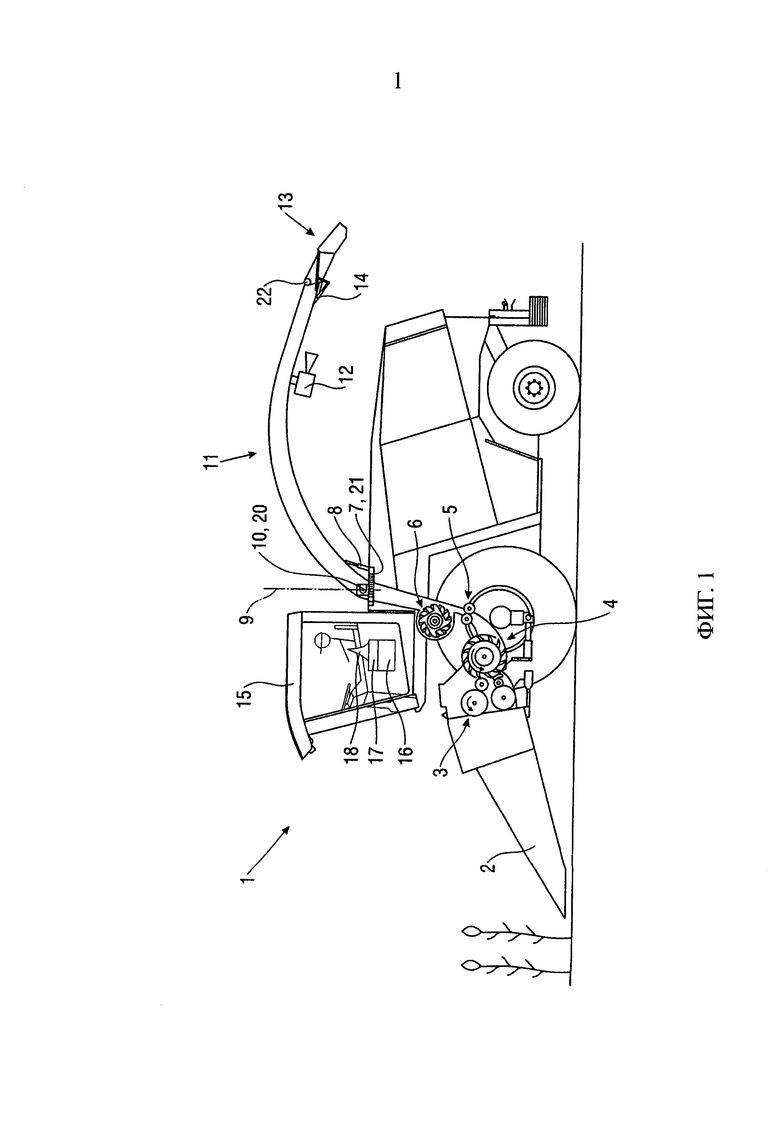
На фиг.1 схематично показана на виде сбоку сельскохозяйственная уборочная машина в виде самоходного полевого измельчителя 1. Полевой измельчитель оснащен системой управления перегрузочным устройством в соответствии с изобретением.
Как показано на чертеже, полевой измельчитель 1 предназначен для того, чтобы при рабочем движении на уборке срезать растения на поле с помощью сменного аппарата 2 и направлять убранный растительный материал через приемный аппарат 3 к измельчительному аппарату 4. В нем убранная масса известным образом измельчается и поступает через транспортирующий провод, который проходит от расположенного под кабиной 15 водителя измельчительного аппарата 4 вверх в область за кабиной 15 водителя к перегрузочному устройству 11. В транспортирующем проводе расположено устройство 5 кондиционирования. За устройством 5 кондиционирования по направлению потока убранной массы расположен метатель 6. Известным и поэтому неописываемым образом метатель 6 содержит оснащенный множеством лопастей барабан метателя, установленный с возможностью привода во вращение, чтобы ускорять убранную массу, которая проходит через транспортирующий провод в области действия лопастей, создаваемым лопастями воздушным потоком в направлении движения потока убранной массы.
Перегрузочное устройство 11, которое называется также разгрузочной трубой, установлено на раме полевого измельчителя 1 с возможностью бокового поворота вокруг вертикальной оси 9 поворота и с возможностью регулирования по высоте путем поворота вокруг горизонтальной оси 10 поворота. Подъемный цилиндр 8, действующий между рамой и перегрузочным устройством 11, служит для регулирования высоты перегрузочного устройства 11. Датчик 20 высоты в виде поворотного потенциометра воспринимает угол поворота по высоте. С помощью приводного поворотного круга 7 перегрузочное устройство 11 может поворачиваться относительно рамы полевого измельчителя 1. Датчик 21 угла поворота в виде поворотного потенциометра воспринимает текущий угол поворота перегрузочного устройства 11.
На дальнем от машины конце перегрузочного устройства 11 расположен разгрузочный дефлектор 13, путем поворота которого можно быстро влиять на угол выброса убранной массы из перегрузочного устройства 11, а вместе с тем и на достигаемую дальность выброса. Регулирование производится с помощью исполнительного гидроцилиндра 14, причем предназначенный для разгрузочного дефлектора 13 датчик 22 угла, также в виде поворотного потенциометра, воспринимает установленное положение дефлектора.
Для оптического восприятия достигнутой точки Р падения (см. другие чертежи) выбрасываемой в процессе уборки убранной массы, а также, при определенных условиях, для оптического восприятия других характеристик, таких как положение, форма, размеры, уровень заполнения грузового контейнера и др., на перегрузочном устройстве 11 установлена камера 12, направленная на область цели выброса. При этом речь идет о стереокамере, которая, помимо прочего, может приводиться в действие, чтобы из принятых изображений определять расстояние до оптически воспринятых объектов. В частности, камера 12 пригодна для определения дальности d выброса (см. другие чертежи) убранной массы, выбрасываемой через перегрузочное устройство 11. Альтернативно или дополнительно на другом месте, например, вблизи цели выброса, может быть расположен оптический датчик.
В кабине 15 водителя, в которой имеется место оператора машины, расположено устройство 16 управления, содержащее числовой процессор сигналов. Устройству 16 управления подчинены оптический индикаторный блок 17 для предоставления оператору машины информации (например, дальности выброса, положения перегрузочного устройства, статуса управления и т.д.) и операторский терминал 18. Помимо привода в действие исполнительных органов 7, 8 и/или 14 операторский терминал 18 позволяет оператору задавать желаемую скорость VP перемещения точки Р падения убранной массы. Пояснения будут даны ниже со ссылками на последующие чертежи.
Устройство 16 управления соединено сигнальными линиями, которые в целях наглядности не показаны, с исполнительными органами 7, 8, 14 перегрузочного устройства 11 и с датчиками 20, 21, 22, а также с камерой 12 для управления ими или для получения от них сигналов. Для специалиста в данной области очевидно, что в рамках изобретения могут использоваться также другие или дополнительные исполнительные органы и датчики, которые также находятся в сигнальной связи с устройством 16 управления.
Далее со ссылками на фиг.2 и 3 будут описаны выгодные возможности применения и получаемый эффект от системы управления, которой оснащен полевой измельчитель 1 по фиг.1.
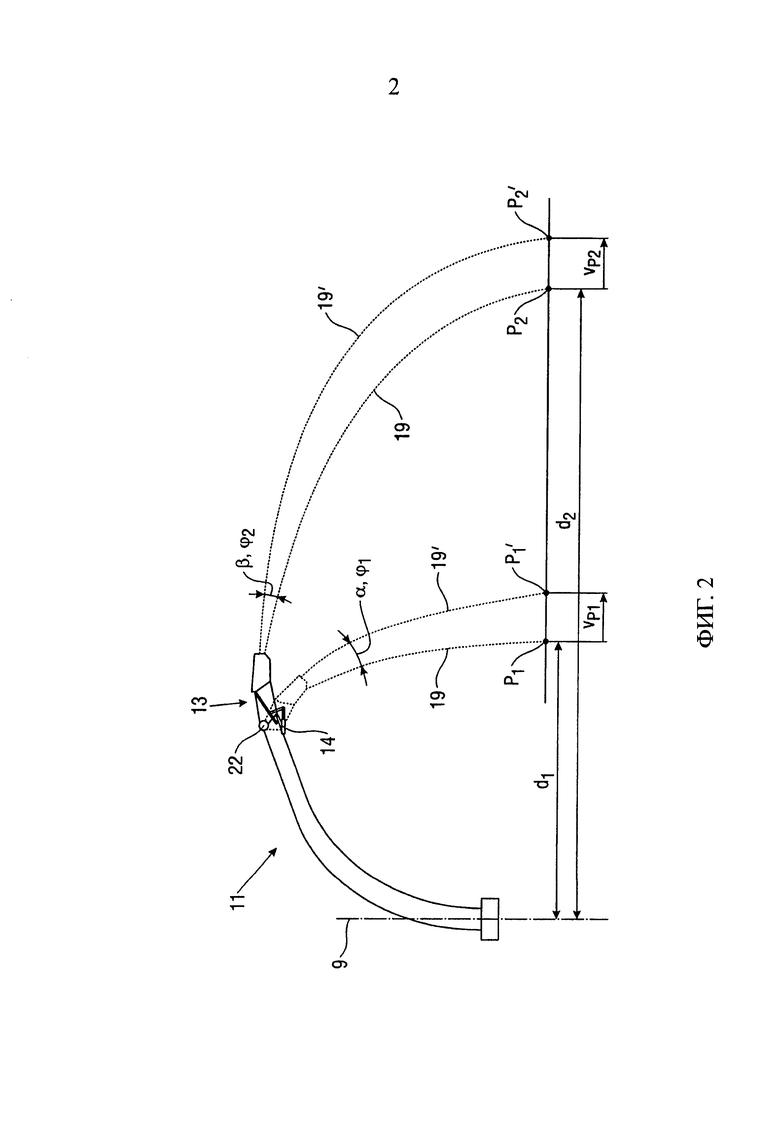
На фиг.2 схематично показано на виде сбоку перегрузочное устройство 11 при выбросе убранной массы 19 в различных ситуациях. В показанном примере выполнения перегрузочным устройством является перегрузочное устройство 11, установленное на полевом измельчителе 1 по фиг.1. Для упрощения представления получаемого от изобретения эффекта сам полевой измельчитель 1 на фиг.2 не показан. На фиг.2 показан выброс убранной массы 19 из перегрузочного устройства 11 по существу в двух ситуациях выброса.
Согласно ситуации выброса в ближнюю область убранная масса 19 выбрасывается в ближнюю точку Р1 паления. При этом достигается дальность d1 выброса, которая соответствует расстоянию между осью 9 поворота перегрузочного устройства 11 (см. фиг.1) и точкой P1 падения. Для получения этого направления выброса разгрузочный дефлектор 13 повернут с помощью исполнительного цилиндра 14 в направленное вниз положение.
Согласно ситуации выброса в дальнюю область убранная масса 19 выбрасывается в дальнюю точку Р2 паления. При этом достигается дальность d2 выброса, которая соответствует расстоянию между осью 9 поворота перегрузочного устройства 11 (см. фиг.1) и точкой Р2 падения. Для получения этого направления выброса разгрузочный дефлектор 13 повернут с помощью исполнительного цилиндра 14 в почти горизонтальное положение.
Если в одной из ситуаций выброса производится регулирование разгрузочного дефлектора 13 (здесь с увеличением его открытия), либо вручную оператором машины через посредство операторского терминала 18, либо в рамках автоматического процесса регулирования позиционирования струи убранной массы, устройство 16 управления (см. фиг.1) посредством адаптации скорости позиционирования исполнительного цилиндра 14 обеспечивает в каждом случае перемещение точки Р1 или Р2 падения с одной и той же постоянной скоростью VP1 или VP2.
В ближней области для этого разгрузочный дефлектор 13 перемещается с регулировочной скоростью φ1 позиционирования на угол α. После регулирования убранная масса 19' падает в точку Р1'. В дальней области для этого разгрузочный дефлектор 13 перемещается с регулировочной скоростью φ2 позиционирования на угол β. После регулирования убранная масса 19' падает в точку Р2'. Как можно видеть на фиг.2, регулировочная скорость φ1 или угол α в ближней области заметно больше, чем регулировочная скорость φ2 или угол β в дальней области. Таким образом, в соответствии с изобретением скорость φ позиционирования разгрузочного дефлектора адаптируется к достигнутой дальности d выброса убранной массы 19.
Положительный эффект заключается в том, что достигнутая точка Р1 или Р2 падения перемещается с одной и той же скоростью VP1 или VP2 независимо от достигнутой дальности d выброса. Таким образом, может достигаться точное управление положением точки падения убранной массы также и в дальней области. При этом эффективно устраняется перерегулирование как при ручном управлении, так и в рамках автоматического процесса регулирования позиционирования струи убранной массы. Для оператора значительно облегчается переход между ближней и дальней перегрузкой. Для выполнения адаптации устройство 16 управления привлекает определенную камерой 12 дальность d выброса убранной массы 19, так что обеспечивается возможность динамической адаптации скорости φ позиционирования исполнительного цилиндра 14 дефлектора к дальности d выброса. Для этого скорость позиционирования исполнительного цилиндра 14 регулируется бесступенчато. Соответственно, изображение на фиг.2 (а также на фиг.3) показывает ситуацию в ближней и дальней области лишь в упрощенном виде.
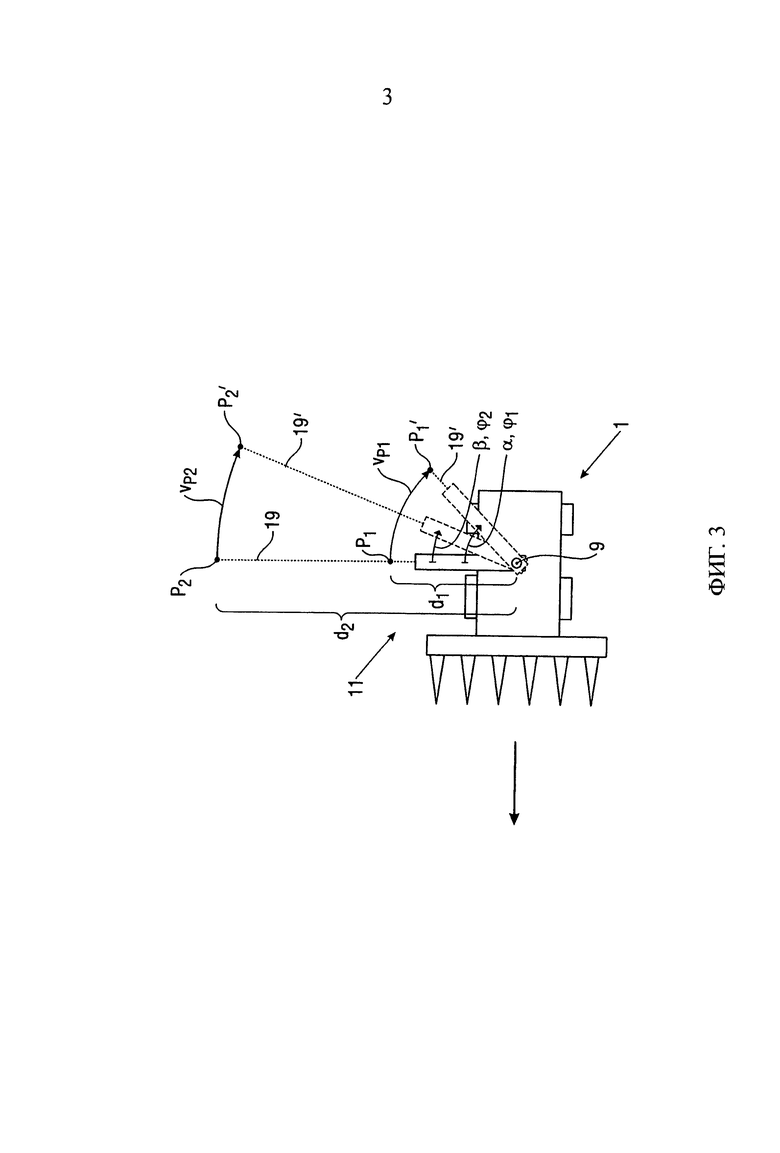
На фиг.3 схематично показан полевой измельчитель 1 на виде сверху при выбросе убранной массы 19 при различных положениях поворота перегрузочного устройства 11. При этом полевой измельчитель 1 является полевым измельчителем по фиг.1. Показан выброс убранной массы 19 из перегрузочного устройства 11 по существу в двух ситуациях выброса.
Согласно ситуации выброса в ближнюю область убранная масса 19 выбрасывается в ближнюю точку P1 падения. При этом достигается дальность d1 выброса, которая соответствует расстоянию между осью 9 поворота перегрузочного устройства 11 и точкой P1 падения. Для получения этой малой дальности d1 выброса разгрузочный дефлектор 13 (здесь не показан) повернут в направленное вниз положение.
Согласно ситуации выброса в дальнюю область убранная масса 19 выбрасывается в дальнюю точку Р2 падения. При этом достигается дальность d2 выброса, которая соответствует расстоянию между осью 9 поворота перегрузочного устройства 11 и точкой Р2 падения. Для получения этой большой дальности d2 выброса дефлектор 13 повернут в почти горизонтальное положение.
Если перегрузочное устройство 11 поворачивается при приводе в действие поворотного круга 7 (см. фиг.1) в одной из ситуаций выброса, либо вручную оператором машины через посредство операторского терминала 18, либо в рамках автоматического процесса регулирования позиционирования струи убранной массы, устройство 16 управления (см. фиг.1) посредством адаптации скорости позиционирования привода поворотного круга 7 обеспечивает в каждом случае перемещение точки Р1 или Р2 падения с одной и той же постоянной скоростью VP1 или VP2 (здесь перемещение по дуге в направлении по часовой стрелке).
В ближней области для этого поворотный круг 7 перемещается с регулировочной скоростью φ1 позиционирования на угол α. После регулирования убранная масса 19' падает в точку Р1'. В дальней области для этого поворотный круг 7 перемещается с регулировочной скоростью φ2 позиционирования на угол β. После регулирования убранная масса 19' падает в точку Р2'. Как можно видеть на фиг.3, регулировочная скорость φ1 или угол α в ближней области заметно больше, чем регулировочная скорость φ2 или угол β в дальней области. Таким образом, в соответствии с изобретением скорость φ позиционирования поворотного круга 7 адаптируется к достигнутой дальности d выброса убранной массы 19.
Положительный эффект заключается в том, что достигнутая точка P1 или Р2 падения перемещается с одной и той же скоростью VP1 или VP2 независимо от достигнутой дальности d выброса. Таким образом, может достигаться точное управление положением точки падения убранной массы также и в дальней области. При этом эффективно устраняется перерегулирование как при ручном управлении, так и в рамках автоматического процесса регулирования позиционирования струи убранной массы. Для оператора значительно облегчается переход между ближней и дальней перегрузкой. Для выполнения адаптации устройство 16 управления привлекает определенную камерой 12 дальность d выброса убранной массы 19, так что обеспечивается возможность динамической адаптации скорости φ позиционирования привода поворотного круга 7 к дальности d выброса.
Воздействие адаптации скорости позиционирования в соответствии с изобретением пояснено на примере разгрузочного дефлектора или привода в действие поворотного круга со ссылками на фиг.2 и 3. Для специалиста в данной области очевидно, что сравнимый эффект может быть получен также для других исполнительных органов перегрузочного устройства, которые влияют на направление выброса убранной массы. К ним может относиться, например, подъемный цилиндр 8 перегрузочного устройства 11 по фиг.1, так как регулирование перегрузочного устройства 11 по высоте также влияет на направление выходящей убранной массы.
Перечень ссылочных обозначений на чертежах
Изобретение относится к области сельскохозяйственных машин. Система содержит средства для изменения скорости позиционирования исполнительного органа в зависимости от достигнутой дальности выброса. Причем из перегрузочного устройства выбрасывается убранная масса с достижением дальности выброса, а для перегрузочного устройства предназначен, по меньшей мере, один исполнительный орган для регулирования направления выброса убранной массы. Обеспечивается создание системы управления перегрузочным устройством, с помощью которой струя убранной массы может управляться более точно, чтобы обеспечить возможность более точного управления положением точки падения, в особенности в дальней области. 12 з.п. ф-лы, 3 ил.
1. Система управления перегрузочным устройством (11) самоходной уборочной машины (1), причем из перегрузочного устройства (11) выбрасывается убранная масса (19) с достижением дальности (d) выброса, а для перегрузочного устройства предназначен, по меньшей мере, один исполнительный орган (7, 8, 13) для регулирования направления выброса убранной массы (19), отличающаяся тем, что система содержит средства (12, 16, 18) для изменения скорости (φ) позиционирования исполнительного органа (7, 8, 13) в зависимости от достигнутой дальности (d) выброса.
2. Система по п.1, отличающаяся тем, что средства (12, 16, 18) содержат устройство (12) для восприятия достигнутой дальности (d) выброса и связанное с ним устройство (16) управления, причем устройство (16) управления выполнено с возможностью привода в действие для изменения скорости (φ) позиционирования исполнительного органа (7, 8, 13) в зависимости от воспринятой дальности (d) выброса.
3. Система по п.2, отличающаяся тем, что устройство выполнено с возможностью определения достигнутой дальности (d) выброса на основе параметров уборочной машины (1).
4. Система по п.2 или 3, отличающаяся тем, что устройство для восприятия достигнутой дальности (d) выброса содержит, по меньшей мере, один оптический датчик (12), который служит для восприятия точки (P) падения убранной массы (19).
5. Система по п.2, отличающаяся тем, что устройство (16) управления выполнено с возможностью привода в действие, чтобы снижать скорость (φ) позиционирования исполнительного органа (7, 8, 13) при увеличении дальности (d) выброса и повышать ее при уменьшении дальности (d) выброса.
6. Система по любому из пп.1-3, 5, отличающаяся тем, что для исполнительного органа (7, 8, 13) предназначен силовой орган (7, 8, 14) с бесступенчато изменяемой скоростью (φ) позиционирования.
7. Система по любому из пп.2, 3, 5, отличающаяся тем, что устройство (16) управления выполнено с возможностью привода в действие, чтобы адаптировать скорость (φ) позиционирования исполнительного органа (7, 8, 13) таким образом, что при приводе в действие исполнительного органа (7, 8, 13) точка (P) падения убранной массы (19) перемещается с неизменной скоростью (Vp).
8. Система по п.7, отличающаяся тем, что для устройства (16) управления предназначен операторский терминал (18), с помощью которого предварительно задается скорость (Vp) перемещения точки (P) падения.
9. Система по любому из пп.1-3, 5, отличающаяся тем, что, по меньшей мере, одним исполнительным органом является перемещаемый посредством силового органа (14) разгрузочный дефлектор (13), влияющий на угол выброса выходящей убранной массы к горизонтальной плоскости.
10. Система по любому из пп.1-3, 5, отличающаяся тем, что перегрузочное устройство (11) установлено с возможностью поворота вокруг вертикальной оси (9) и/или вокруг горизонтальной оси (10) относительно рамы уборочной машины (1), причем для соответствующего поворота перегрузочного устройства (11) служит силовой орган (7, 8).
11. Система по любому из пп.1-3, 5, отличающаяся тем, что исполнительный орган (7, 8, 13) выполнен с возможностью привода в действие вручную через посредство операторского терминала (18).
12. Система по любому из пп.1-3, 5, отличающаяся тем, что исполнительный орган (7, 8, 13) выполнен с возможностью привода в действие в рамках автоматического процесса регулирования позиционирования струи убранной массы.
13. Система по любому из пп.1-3, 5, отличающаяся тем, что уборочной машиной является самоходный полевой измельчитель (1).
| ТКАНАЯ СЕТКА | 1995 |
|
RU2100495C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ УРОВНЯ СЫПУЧИХ МАТЕРИАЛОВ | 1998 |
|
RU2138027C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАБОТОЙ ПЕРЕГРУЗОЧНОГО УСТРОЙСТВА СЕЛЬХОЗМАШИНЫ И СЕЛЬХОЗМАШИНА | 2003 |
|
RU2348142C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ АППАРАТОМ | 1999 |
|
RU2245611C2 |

