Область техники, к которой относится изобретение
Изобретение относится к самоходной сельскохозяйственной уборочной машине, содержащей установленное на раме уборочной машины перегрузочное устройство, выполненное с возможностью перестановки посредством исполнительного органа.
Уровень техники
Такие уборочные машины, имеющиеся на рынке сельскохозяйственной техники, известны в течение многих лет. В частности, силосоуборочные комбайны, называемые также полевыми измельчителями, оснащены регулируемым по высоте перегрузочным устройством для перегрузки убранной массы на транспортное средство, движущееся рядом с полевым измельчителем или за ним. Для этого перегрузочное устройство, называемое также «разгрузочной трубой», установлено на раме полевого измельчителя с возможностью поворота, по меньшей мере, вокруг горизонтальной оси. С помощью, например, гидроцилиндра или электромотора перегрузочное устройство может быть повернуто вокруг горизонтальной оси для регулировки его высоты относительно рамы машины. Кроме того, в большинстве случаев перегрузочное устройство может поворачиваться также вокруг вертикальной оси, что в зависимости от угловой установки позволяет ему производить боковую перегрузку на транспортное средство, идущее рядом с уборочной машиной, или заднюю перегрузку на транспортное средство за уборочной машиной.
Вследствие рыночной тенденции ко все большему увеличению рабочей ширины захвата длина перегрузочных устройств становится все больше. Кроме прочего требование к увеличению длины обусловлено тем, что из-за более широкого навесного рабочего оборудования силосоуборочного комбайна транспортные средства при боковой перегрузке должны держаться дальше от полевого измельчителя, однако одновременно с этим, несмотря на более дальнее расстояние должна обеспечиваться надежная перегрузка убранной массы.
Вследствие большой длины перегрузочного устройства даже небольшие движения продольного или бокового качания уборочной машины (поворот вокруг центральной продольной или поперечной оси), которые возникают, например, при рабочем движении по неровностям, приводят к относительно большим изменениям положения разгрузочного конца перегрузочного устройства, так как перегрузочное устройство, будучи установлено на раме машины, совершает движения вместе с рамой. При этом выходящая из перегрузочного устройства струя убранной массы может легко отклониться от заданной точки попадания, что при перегрузке на транспортное средство приводит к нежелательным потерям убранной массы.
Поскольку перегрузочное устройство имеет немалую массу и обладает определенной собственной упругостью, это продольное качание и поперечные движения уборочной машины помимо прочего вызывают колебания, которые легко нарастают неуправляемым образом.
Кроме вызванных неровностями движений машины возникают также другие причины возбуждения колебаний перегрузочного устройства. Это могут быть, например, колебания, вызванные рабочими органами уборочной машины (сменным аппаратом, приемными органами, измельчительным аппаратом, устройством доизмельчения, метателем и т.д.) или самой струей убранной массы (колебаниями интенсивности, пуском или прекращением струи убранной массы), которые передаются через раму машины или непосредственно на перегрузочное устройство.
Указанные колебания затрудняют процесс перегрузки по описанным причинам. Кроме того, колебания приводят к значительной нагрузке на материал самого перегрузочного устройства и относящихся к нему опор, что снижает их долговечность.
Раскрытие изобретения
Соответственно, задачей изобретения является создание самоходной уборочной машины, в которой упрощен процесс перегрузки даже при использовании относительно длинного перегрузочного устройства. Кроме того, задачей изобретения является снижение нагрузки на конструктивные материалы.
В соответствии с отличительными признаками пункта 1 формулы изобретения решение поставленной задачи достигается за счет того, что описанная выше уборочная машина отличается наличием системы для активного демпфирования колебаний перегрузочного устройства, которая содержит, по меньшей мере, один датчик для восприятия воздействующей на перегрузочное устройство причины колебаний, и блок обработки данных и управления, который приводит в действие исполнительный орган в зависимости от воспринятой причины колебаний для демпфирования колебаний перегрузочного устройства.
Согласно изобретению уборочная машина оснащена выполненной в виде цепи автоматического управления системой, которая активно демпфирует колебания перегрузочного устройства. Как было упомянуто выше, колебания могут быть вызваны изменениями положения уборочной машины (движениями продольного или поперечного качания от неровностей почвы) или другими условиями эксплуатации. Предусмотренный в соответствии с изобретением блок обработки данных и управления приводит в действие исполнительный орган для регулировки перегрузочного устройства по высоте таким образом, что нежелательные колебания перегрузочного устройства, по меньшей мере, снижаются. Благодаря этому перегрузочное устройство может удерживаться в определенном положении в значительной мере независимо от толчков, вызванных возбуждением возмущающих колебаний. Это облегчает процесс перегрузки. Кроме того, за счет демпфирования колебаний или даже их полного устранения снижается нагрузка на материал самого перегрузочного устройства и связанных с ним опорных мест.
Предпочтительно блок обработки данных и управления приводит в действие исполнительный орган в направлении противодействия причине колебаний.
В соответствии с изобретением предусмотренный в уборочной машине блок обработки данных и управления предпринимает активное демпфирование колебаний в зависимости от сигнала датчика, который может быть генерирован различным образом. Согласно предпочтительному решению по развитию изобретения этим датчиком является датчик нагрузки, который выполнен с возможностью восприятия опорных усилий от перегрузочного устройства на раму машины. Поскольку внезапное изменение положения уборочной машины (например, ее продольное или поперечное качание) вследствие инерции перегрузочного устройства вызывает реактивные усилия в местах его опоры, такой датчик нагрузки позволяет легко воспринимать причины колебаний, воздействующих на перегрузочное устройство.
Для восприятия изменения опорных усилий может служить, например, динамометрический стержень, расположенный у точки опоры перегрузочного устройства.
Предпочтительно датчиком нагрузки является предназначенный для исполнительного органа датчик давления. Такой пример выполнения предлагается при выполнении исполнительного органа в виде гидравлического или пневматического цилиндра, так как в этом случае требуются небольшие конструктивные изменения.
Альтернативно или дополнительно восприятие воздействующей на перегрузочное устройство причины колебаний может осуществляться посредством датчика угла поворота, который, например, воспринимает угол раскачивания между рамой машины и перегрузочным устройством. Предпочтительно такой датчик угла поворота может использоваться дополнительно к датчику нагрузки или давления.
Альтернативно или дополнительно восприятие причины колебаний может осуществляться посредством расположенного на перегрузочном устройстве датчика ускорения. Использование датчика ускорения дает особое преимущество в том, что оно позволяет воспринимать колебания, вызванные упругостью перегрузочного устройства. Для этого датчик ускорения предпочтительно расположен в дальней от уборочной машины области перегрузочного устройства, поскольку здесь наиболее велики амплитуды колебаний, а следовательно и ускорения.
Альтернативно или дополнительно восприятие причины колебаний может осуществляться посредством датчика, который выполнен с возможностью определения положения перегрузочного устройства относительно окружения. Так, например, датчик может воспринимать положение перегрузочного устройства по отношению к гравитационному или магнитному полю Земли или к линии горизонта. Далее, в качестве датчика может использоваться центробежный прибор (гироскоп).
Согласно следующему предпочтительному решению датчик может быть выполнен с возможностью восприятия изменения положения относительно транспортного средства. Для этого датчик может быть расположен на перегрузочным устройстве и, например, посредством оптического измерения расстояния воспринимать относительные изменения положения относительно контрольной точки или области на транспортном средстве.
Альтернативно или дополнительно возможен вариант, в котором в качестве датчика служит датчик положения, расположенный на раме уборочной машины. Таким датчиком предпочтительно может быть датчик ускорения или центробежный прибор (гироскоп) для восприятия движений рамы машины в качестве причины колебаний перегрузочного устройства.
Предпочтительно описанная система демпфирования колебаний поддерживается цепью автоматического управления для настройки высоты перегрузочного устройства. Такая поддержка целесообразна, так как помимо предусмотренного изобретением активного демпфирования колебаний системой должна поддерживаться желаемая высота перегрузочного устройства или она должна вновь устанавливаться после прекращения причины колебаний.
Предпочтительно блок обработки данных и управления управляет исполнительным органом в зависимости от других эксплуатационных критериев сельскохозяйственной уборочной машины. Такими критериями могут служить расход убранной массы, вид убираемой культуры, скорость потока убранной массы, скорость движения машины, угол установки колес при рулевом повороте, положение уклона (наклон почвы), вертикальный угол поворота перегрузочного устройства относительно рамы машины или другие эксплуатационные параметры уборочной машины.
Регулировка высотного положения перегрузочного устройства предпочтительно обеспечивается за счет того, что перегрузочное устройство выполнено с возможностью поворота относительно рамы машины вокруг горизонтальной оси.
В качестве исполнительного органа для осуществления регулировки по высоте особенно пригоден гидроцилиндр. Для улучшения его двустороннего срабатывания он может быть выполнен в виде гидроцилиндра двустороннего действия. Альтернативно может быть использован также пневматический или электрический исполнительный орган.
В предпочтительном примере осуществления при приводе в действие исполнительного органа блок обработки данных и управления учитывает высотное положение перегрузочного устройства. За счет этих мер могут, например, предотвращаться столкновения между перегрузочным устройством и рамой машины или другие удары в конечном положении настройки. Для этого блок обработки данных и управления получает от датчика высотного положения (например, упомянутого датчика угла поворота) данные о высотном положении перегрузочного устройства.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения, его другие особенности и преимущества.
На чертежах:
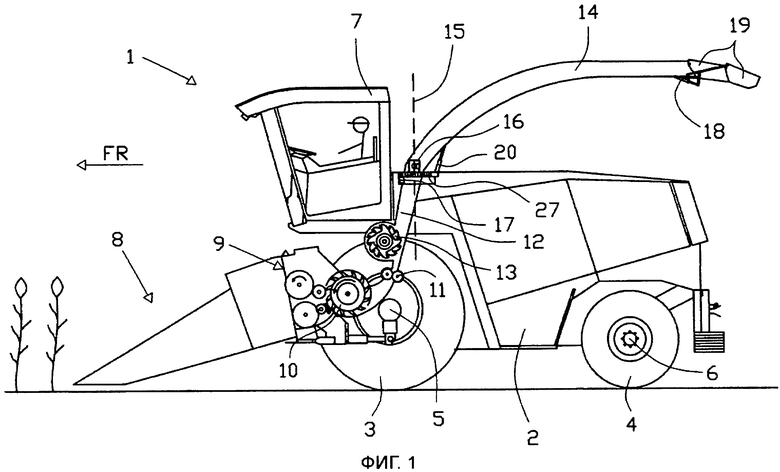
фиг.1 схематично изображает на виде сбоку силосоуборочный комбайн с повернутым назад перегрузочным устройством,
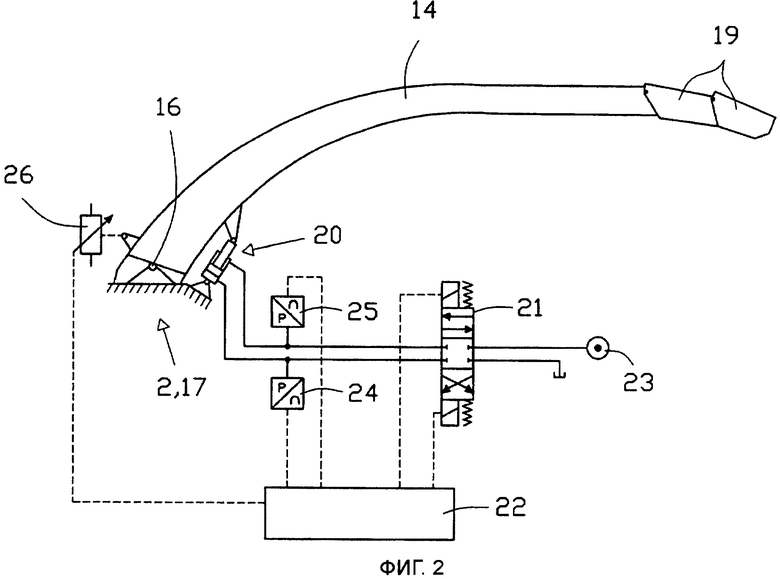
фиг.2 схематично изображает на виде сбоку перегрузочное устройство силосоуборочного комбайна по изобретению.
Осуществление изобретения
На фиг.1 на виде сбоку с частичным разрезом показана самоходная сельскохозяйственная уборочная машина, выполненная в виде полевого измельчителя (силосоуборочного комбайна) 1. Оборудование силосоуборочного комбайна 1 смонтировано на раме 2 машины, которая опирается на приводные передние колеса 3 передней ходовой оси 5 и задние колеса 4 задней ходовой оси 6. Управление силосоуборочным комбайном 1 осуществляется из кабины 7 водителя, расположенной над передней ходовой осью 5.
Спереди по направлению FR движения машины силосоуборочный комбайн оснащен сменным уборочным аппаратом 8, например, кукурузной приставкой, которая при работе принимает убираемую массу, при необходимости измельчает ее и передает на последующий приемный орган 9 (который содержит приемные вальцы и вальцы предварительного прессования). Приемный орган 9 направляет убранную массу к расположенному за ним вращающемуся измельчительному барабану 10, вращающиеся измельчительные ножи которого измельчают убранную массу при взаимодействии с ответной режущей кромкой. Далее измельченная убранная масса передается на устройство 11 доизмельчения (известное также как зернодробилка), которое дробит зерна убранной массы, например, кукурузы, и передает убранную массу по транспортирующему трубопроводу 12 на метатель 13. Метатель 13 ускоряет измельченную убранную массу и выбрасывает ее через перегрузочное устройство, выполненное в виде разгрузочной трубы 14, на не показанное транспортное средство.
Разгрузочная труба 14 может поворачиваться вокруг вертикальной оси 15. Привод поворота осуществляется посредством расположенного у основания разгрузочной трубы 14 поворотного круга 27, с которым зацепляется не показанная червячная передача. Возможность поворота позволяет выборочно производить боковую перегрузку на транспортное средство, движущееся рядом с силосоуборочным комбайном 1 или перегрузку на транспортное средство, следующее за силосоуборочным комбайном 1.
Для изменения высотного положения разгрузочная труба 14 может поворачиваться также вокруг горизонтальной оси 16. Регулировка по высоте обеспечивается посредством гидроцилиндра 20, расположенного между монтажной опорой 17 и точкой опоры разгрузочной трубы 14.
На разгрузочном конце разгрузочной трубы 14 находится состоящий из нескольких частей разгрузочный дефлектор 19, регулируемый посредством другого гидроцилиндра 18. Путем регулировки разгрузочного дефлектора 19 может регулироваться дальность выброса, то есть расстояние между силосоуборочным комбайном 1 и точкой падения убранной массы на транспортное средство. При одном и том же положении разгрузочной трубы 14 при повороте разгрузочного дефлектора 19 вниз дальность выброса становится меньше, чем при повернутом вверх разгрузочном дефлекторе 19.
При перегрузке убранной массы от силосоуборочного комбайна на движущееся вместе с ним транспортное средство комбайн движется по полю в направлении FR переднего хода. В зависимости от вида перегрузки разгрузочная труба повернута вокруг вертикальной оси 15 и ориентирована таким образом, что направлена либо примерно поперечно направлению FR движения (боковая перегрузка), либо, как показано на фиг.1, назад (перегрузка на транспортное средство, следующее за комбайном).
Для выравнивания колебаний, которые по различным причинам возбуждаются в разгрузочной трубе 14 при работе силосоуборочного комбайна 1, он оснащен системой для активного демпфирования колебаний, которая будет подробно описана в примере выполнения со ссылкой на фиг.2.
На фиг.2 схематично показано в виде разгрузочной трубы перегрузочное устройство 14, которое установлено на раме 2 самоходной сельскохозяйственной уборочной машины с возможностью поворота вокруг горизонтальной оси 16 поворота. При этом уборочной машиной может быть силосоуборочный комбайн 1, показанный на фиг.1. В этом случае разгрузочная труба 14 установлена на раме 2 машины с помощью монтажной опоры 17, поворотной вокруг вертикальной оси 15 (см. фиг.1).
Для регулировки высотного положения разгрузочной трубы 14 служит показанный на фиг.2 гидроцилиндр 20 двустороннего действия с верхней и нижней полостями. Полости питаются от источника 23 давления с помощью двух не обозначенных позициями раздельных линий. Посредством переключения двухходового клапана 21 в полости гидроцилиндра 20 независимо друг от друга подается гидравлические давление для перемещения разгрузочной трубы 14 вверх или вниз.
Так, подъем разгрузочной трубы 14 обеспечивается разностью давлений в нижней полости по сравнению с верхней полостью, причем эта разность превышает требуемую разность давлений для компенсации силы веса разгрузочной трубы 14, действующей на цилиндр 20.
Опускание разгрузочной трубы 14 может достигаться при снижении разности давления ниже величины, требуемой для «удержания разгрузочной трубы 14». Для ускорения процесса опускания в верхнюю полость может подаваться давление, в особенности давление выше давления в нижней полости.
В представленном примере выполнения система для активного демпфирования колебаний предусматривает, что каждая из питающих линий гидроцилиндра 20 снабжена датчиком 24, 25 давления. Блок 22 управления по показанным штриховыми линиями сигнальным линиям непрерывно получает информацию о состоянии давления в питающих линиях полостей гидроцилиндра 20. Далее, блок 22 может управлять клапаном 21 с помощью сигнальных линий (также показанных штриховыми линиями) и таким образом влиять на давление в питающих линиях гидроцилиндра 20.
Самоходная уборочная машина, такая как показанный на фиг.1 силосоуборочный комбайн 1, в процессе уборки может совершать колебания (как это описано вначале), создающие помехи работе разгрузочной трубы 14. Это происходит, например, вследствие движений рамы 2 машины при проезде по неровностям или пересечении неровностей. Возможны и другие причины колебаний, например, создаваемые рабочими аппаратами или колебаниями интенсивности самой струи убранной массы. В частности, вызванные неровностями движения рамы 2 машины (продольное и боковое качание) проявляются в направленных вверх и вниз колебаниях разгрузочной трубы 14.
Вследствие изменяющегося вектора реактивных усилий колебания разгрузочной трубы 14 приводят к колебаниям опорных усилий в местах опоры разгрузочной трубы 14, а следовательно и на гидроцилиндре 20. Датчики 24, 25 давления воспринимают вызываемые этими колебаниями колебания давления в питающих линиях гидроцилиндра 20. При этом блок 22 управления может подавать на клапан 21 сигнал для привода гидроцилиндра 20 таким образом, чтобы демпфировать колебания разгрузочной трубы 14. В идеальном случае сигнал, подаваемый блоком 22 управления на исполнительный орган (который содержит клапан 21 и гидроцилиндр 20), отрегулирован по времени и по интенсивности таким образом, что колебания разгрузочной трубы 14 практически устраняются.
Благодаря такому активному демпфированию колебаний значительно упрощается процесс перегрузки и значительно снижается нагрузка на материал разгрузочной трубы 14.
Следует отметить, что благотворное воздействие активного демпфирования колебаний, разумеется, может достигаться также при выполнении гидроцилиндра 20 в виде гидроцилиндра простого или одностороннего действия.
Далее, в качестве датчиков могут использоваться отличные от датчиков давления, датчики, пригодные для восприятия причин колебаний.
Согласно фиг.2 для целей демпфирования колебаний система содержит датчик 26 угла поворота. Он может использоваться альтернативно датчикам 24, 25 давления или дополнительно к ним. Датчик 26 угла поворота воспринимает угол раскачивания между рамой 2 машины (или монтажной опорой 17) и разгрузочной трубой 14 и передает его на блок 22 управления. В соответствии с этим блок 22 управления может выводить из величины угла раскачивания дополнительные (или альтернативные) меры для демпфирования колебаний. Возможны также другие датчики для восприятия причин колебаний, например расположенный на разгрузочной трубе 14 датчик ускорения (на фиг.2 не показан).
В целесообразном примере осуществления системе демпфирования колебаний подчинена цепь автоматического регулирования для регулировки высоты разгрузочной трубы 14. Соответственно, оператор уборочной машины может настроить желаемую высоту разгрузочной трубы 14, которая будет вновь устанавливаться после демпфирования колебаний посредством блока 22 управления.
Перечень ссылочных обозначений на чертежах
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано при уборке сельскохозяйственных культур. Самоходная сельскохозяйственная уборочная машина включает установленное на раме перегрузочное устройство, по меньшей мере один датчик для восприятия воздействующей на перегрузочное устройство причины колебаний и блок обработки данных и управления. Перегрузочное устройство выполнено с возможностью регулировки по высоте посредством исполнительного органа. Блок обработки данных и управления приводит в действие исполнительный орган в зависимости от воспринятой причины колебаний для демпфирования колебаний перегрузочного устройства. Использование изобретения позволяет за счет демпфирования снизить нагрузки на элементы уборочной машины. 11 з.п. ф-лы, 2 ил.
1. Самоходная сельскохозяйственная уборочная машина (1), в особенности силосоуборочный комбайн, содержащая установленное на раме (2) уборочной машины (1) перегрузочное устройство (14), выполненное с возможностью регулировки по высоте посредством исполнительного органа (20), по меньшей мере, один датчик (24, 25, 26) для восприятия воздействующей на перегрузочное устройство (14) причины колебаний, и блок (22) обработки данных и управления, который приводит в действие исполнительный орган (20) в зависимости от воспринятой причины колебаний для демпфирования колебаний перегрузочного устройства (14),
отличающаяся тем, что оснащена системой для активного демпфирования колебаний перегрузочного устройства (14), которая содержит датчик, выполненный с возможностью восприятия изменения положения перегрузочного устройства (14) относительно транспортного средства.
2. Уборочная машина по п. 1, отличающаяся тем, что блок (22) обработки данных и управления приводит в действие исполнительный орган (20) в направлении противодействия причине колебаний.
3. Уборочная машина по п. 1, отличающаяся тем, что в качестве датчика (24, 25) служит, по меньшей мере, один датчик нагрузки, который выполнен с возможностью восприятия опорных усилий от перегрузочного устройства (14) на раму (2) машины.
4. Уборочная машина по п. 1, отличающаяся тем, что в качестве датчика (24, 25) служит, по меньшей мере, один датчик давления, предназначенный для исполнительного органа.
5. Уборочная машина по п. 1, отличающаяся тем, что в качестве дополнительного датчика (26) служит датчик угла поворота, который воспринимает угол раскачивания между рамой (2) машины и перегрузочным устройством (14).
6. Уборочная машина по п. 1, отличающаяся тем, что в качестве дополнительного датчика служит расположенный на перегрузочным устройстве (14) датчик ускорения.
7. Уборочная машина по п. 1, отличающаяся тем, что датчик выполнен с возможностью определения положения перегрузочного устройства (14) относительно окружения.
8. Уборочная машина по п. 1, отличающаяся тем, что в качестве дополнительного датчика служит расположенный на раме (2) машины датчик положения.
9. Уборочная машина по любому из пп. 1-8, отличающаяся тем, что система активного демпфирования колебаний снабжена цепью автоматического управления для настройки высоты перегрузочного устройства (14).
10. Уборочная машина по любому из пп. 1-8, отличающаяся тем, что блок (22) обработки данных и управления управляет исполнительным органом (20) в зависимости от эксплуатационных критериев сельскохозяйственной уборочной машины, включающих расход убранной массы, вид убираемой культуры, скорость потока убранной массы, скорость движения машины, угол установки колес при рулевом повороте, положение уклона, вертикальный угол поворота перегрузочного устройства относительно рамы машины.
11. Уборочная машина по любому из пп. 1-8, отличающаяся тем, что перегрузочное устройство (14) для регулировки его высотного положения относительно рамы (2) машины выполнено с возможностью поворота вокруг горизонтальной оси (16).
12. Уборочная машина по любому из пп. 1-8, отличающаяся тем, что исполнительный орган (10) выполнен в виде гидроцилиндра.
| EP 1927277 A1, 04.06.2008; |

