Область техники, к которой относится изобретение
Изобретение относится к уборочной сельхозмашине в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Уборочные сельхозмашины, в частности самоходные полевые измельчители при своем рабочем движении во время уборки убирают растения с поля, измельчают их с помощью различных рабочих аппаратов и выбрасывают измельченную убранную массу в грузовой контейнер с помощью перегрузочного устройства, называемого разгрузочной трубой. Грузовой контейнер может находиться, например, на прицепе, который тянется тягачом и во время рабочего движения для целей перегрузки находится рядом с полевым измельчителем или за ним.
Требуемая для выброса убранной массы кинетическая энергия передается посредством, по меньшей мере, одного транспортирующего органа, принадлежащего полевому измельчителю. При этом речь идет, в частности, о метателе, который расположен в транспортирующей шахте после измельчительного аппарата по направлению транспортирования убранной массы и служит для дополнительного ускорения убранной массы перед ее входом в перегрузочное устройство. В целом другие рабочие аппараты полевого измельчителя, такие как приемные аппараты, измельчительный аппарат, устройство кондиционирования, уже передают убранной массе кинетическую энергию, поскольку они, кроме прочего, ускоряют ее и поэтому могут также рассматриваться как транспортирующие органы. Переданная посредством ускорения кинетическая энергия предотвращает скопление убранной массы в транспортирующей шахте или в перегрузочном устройстве и их забивание.
Из уровня техники, например, из патентного документа ЕР 1380204, известен транспортирующий орган в виде метателя для самоходного полевого измельчителя, с помощью которого во время эксплуатации на уборке может регулироваться ускорение убранной массы. Для этого может изменяться ширина прохода убранной массы через метатель путем перемещения метателя относительно окружающего его корпуса машины. Регулирование производится в зависимости от параметров убранной массы, таких как плотность, влажность и/или скорость, с целью обеспечения надежного потока убранной массы при ее различных свойствах с устранением забивания перегрузочного устройства.
При работе полевого измельчителя на уборке исходное требование заключается в том, чтобы приблизительно непрерывно вывозить убранную массу, выбрасываемую через перегрузочное устройство. Используемые для этого грузовые контейнеры, как правило, тянутся тягачом рядом с производящим уборку полевым измельчителем или за ним или смонтированы на подходящем самоходном транспортном средстве. Поскольку их вместимость ограничена, они должны в процессе уборки совершать многочисленные транспортные рейсы. Однако каждый транспортный рейс связан с затратами и означает, что должен быть наготове другой грузовой контейнер, чтобы не нужно было прерывать процесс уборки. Поэтому по экономическим соображениям требуется при каждой загрузке полностью использовать вместимость грузового контейнера, чтобы по возможности снизить число рейсов по вывозу.
Для того, чтобы полностью использовать вместимость грузового контейнера и по возможности быстро заканчивать процесс заполнения, на практике стремятся заполнить его убранной массой до краев заполнения. Для этого водитель полевого измельчителя направляет струю убранной массы по большей части регулируемого перегрузочного устройства в грузовой контейнер таким образом, чтобы заполнить его до краев. Однако при этом к концу процесса заполнения, как правило, происходят потери убранной массы, так как струя убранной массы, выбрасываемая из перегрузочного устройства с большой скоростью, «выскакивает» из грузового контейнера, когда он заполнен почти до высоты бортов, или даже перелетает через него. Потери убранной массы этого вида имеют место тем чаще и тем более велики, чем более полого направлена струя убранной массы, так как в этом случае убранная масса падает на уже имеющийся в грузовом контейнере насыпной груз и имеет тенденцию отскока от образованной верхней поверхности. Кроме того, убранная масса еще и выдувается из грузового контейнера.
Раскрытие изобретения
На основании изложенного, задачей изобретения является создание уборочной машины указанного типа, которая в процессе перегрузки в грузовой контейнер обеспечивает лучшее использование его вместимости и способствует устранению потерь убранной массы так, что в целом достигается более эффективный процесс перегрузки.
В соответствии с изобретением решение поставленной задачи достигается в уборочной машине по пункту 1 формулы изобретения. Она отличается тем, что содержит устройство для восприятия уровня заполнения грузового контейнера, а также средства для изменения скорости убранной массы в точке падения в зависимости от уровня заполнения грузового контейнера.
Решение по изобретению основывается прежде всего на знании того, что убранная масса при выбросе через перегрузочное устройство падает в грузовой контейнер с определенной скоростью в точке падения. В математическом аспекте эта скорость падения имеет величину и направление скорости. Эти параметры могут в целом поддаваться влиянию посредством различных мер, в частности, посредством изменения ускорения убранной массы в расположенных перед перегрузочным устройством транспортирующих органах и/или посредством изменения формы траектории выброса убранной массы.
В соответствии с изобретением было осознано, что посредством влияния на скорость может быть получен положительный эффект в отношении перегрузки убранной массы, поскольку при заполнении грузового контейнера следует учитывать факторы, изменяющиеся в ходе заполнения. В начале заполнения, - то есть когда грузовой контейнер пуст или при низком локальном уровне заполнения, - не возникает проблем в том, чтобы допускать падение убранной массы в грузовой контейнер с относительно высокой скоростью, поскольку высокие борта грузового контейнера (по отношению к текущему уровню заполнения) препятствуют потерям убранной массы. На этой стадии относительно высокая скорость падения выгодным образом обеспечивает высокое уплотнение убранной массы в грузовом контейнере. При этом для еще большего уплотнения струя убранной массы может падать не только с высокой скоростью, но также, - при наличии возможности при конкретных обстоятельствах перегрузки, - под как можно более крутым углом к верхней поверхности в грузовом контейнере в точке падения. За счет целенаправленного высокого уплотнения загружаемой убранной массы оптимально используется вместимость грузового контейнера.
К концу процесса заполнения, то есть при приближении к границе заполнения грузового контейнера (по меньшей мере, локальной), - высокая скорость убранной массы и/или более пологий угол в точке падения имеют тот недостаток, что могут возникать уже упомянутые потери убранной массы. Поэтому на этой стадии выгодно производить заполнение убранной массой с пониженной скоростью в точке падения в грузовом контейнере по сравнению с начальной стадией. Кроме того, на этой стадии также может быть целесообразно, чтобы убранная масса падала в точку падения по возможности под крутым углом к верхней поверхности в грузовом контейнере, так как крутой угол в дополнение к сниженной скорости затрудняет выпадение или отскок убранной массы из грузового контейнера.
Для автоматической смены стратегии перегрузки в зависимости от уровня заполнения грузового контейнера согласно изобретению уборочная машина снабжена устройством для восприятия уровня заполнения грузового контейнера, а также связанными с ним средствами, чтобы влиять на скорость убранной массы в точке падения в зависимости от уровня заполнения грузового контейнера. Благодаря этим особенностям обеспечивается решение указанной задачи. В рамках изобретения могут использоваться различные средства влияния на скорость падения убранной массы, как это будет подробно объяснено ниже.
Согласно предпочтительному примеру осуществления изобретательской идеи уборочная машина содержит устройство управления, выполненное с возможностью привода в действие для изменения ускорения убранной массы посредством управления транспортирующим органом. Соответственно, предпочтительно транспортирующий орган выполнен таким образом, что обеспечивает возможность изменения ускорения убранной массы. Ускорение убранной массы в транспортирующем органе находится в тесной взаимосвязи со скоростью убранной массы в точке падения в грузовом контейнере. Поэтому управление, по меньшей мере, одним транспортирующим органом представляет особенно простую и эффективную меру влияния на скорость падения убранной массы.
Наиболее просто изменение ускорения осуществимо, когда транспортирующий орган является метателем. Метатель обеспечивает то преимущество, что ускорение убранной массы может быть изменено простым регулированием числа оборотов и/или ширины прохода и/или установки лопастей и/или подачи воздуха метателем. В этом отношении можно сделать ссылку на патентный документ ЕР 1380204, в котором описаны технические возможности изменения ускорения в метателе. Содержание этого документа должно быть включено в настоящее описание в качестве ссылки.
Альтернативно или дополнительно уборочная машина содержит устройство управления, выполненное с возможностью привода в действие для изменения влияющего на траекторию выброса убранной массы состояния перегрузочного устройства посредством управления, по меньшей мере, одним исполнительным органом, относящимся к перегрузочному устройству. В основе этого решения лежит знание того, что траектория выброса убранной массы также может влиять на скорость убранной массы в точке падения. Согласно этому решению предпочтительно перегрузочное устройство выполнено с возможностью изменения его состояния по высоте, углу выброса (в большинстве случаев определяемого положением дефлектора разгрузочной трубы) и/или по его длине (что реализуется, например, с помощью телескопической разгрузочной трубы), причем регулирование производится в каждом случае с помощью соответствующего исполнительного органа. В соответствии с этим устройство управления, например, посредством перевода перегрузочного устройства в определенное состояние (установки в высотное положение, открытия разгрузочного дефлектора) может добиться того, что убранная масса вместо выброса по пологой траектории выбрасывается по высокой дуге, что по сравнению с пологой траекторией выброса может выгодным образом приводить к сниженной скорости убранной массы в точке падения, когда убранная масса падает вниз только под действием силы тяжести.
Таким образом, предпочтительно для перегрузочного устройства предусмотрен исполнительный орган для регулирования его высотного положения и/или исполнительный орган для изменения угла выброса и/или исполнительный орган для регулирования длины перегрузочного устройства, причем исполнительный орган может управляться устройством управления. Возможно использование других исполнительных органов для других мер регулирования, влияющих на траекторию выброса.
В качестве предусмотренного изобретением устройства для восприятия уровня заполнения грузового контейнера в принципе может использоваться любое пригодное для этого устройство, - например, весы или другое измерительное устройство. Согласно предпочтительному решению по развитию изобретения устройство для восприятия уровня заполнения содержит направленную на точку падения убранной массы камеру, причем устройство выполнено с возможностью на основании воспринятого камерой изображения выводить уровень заполнения грузового контейнера. Соответственно, предпочтительно восприятие уровня заполнения осуществляется оптически, так как в этом случае конструктивно простым путем могут быть получены особенно полные данные об уровне заполнения. Может использоваться одна или несколько камер. Они могут быть оптимально расположены на перегрузочном устройстве, на уборочной машине и/или на грузовом контейнере, чтобы оптически воспринимать уровень заполнения. При этом восприятие уровня заполнения может осуществляться локально при логическом подразделении грузового контейнера на различные области поверхности, то есть для каждой области поверхности в грузовом контейнере определяется индивидуальный уровень заполнения, так что в результате создается поле отдельных уровней заполнения для грузового контейнера. Благодаря этому обеспечивается возможность соответствующего локального индивидуального заполнения. Альтернативно для всего грузового контейнера может определяться один уровень заполнения.
В предпочтительном примере осуществления уровень заполнения содержит данные о высоте заполнения, по меньшей мере, в одной области грузового контейнера. Затем на основе этой информации, - например, при известной высоте контейнера, - может определяться оставшийся потенциал заполнения.
Предпочтительно уровень заполнения содержит данные о контуре заполнения, то есть о профиле верхней поверхности заполнения, по меньшей мере, в одной области грузового контейнера. Такая информация может служить, например, для того, чтобы оптимизировать угол падения убранной массы с учетом текущего уровня заполнения.
Согласно следующему предпочтительному решению по развитию изобретения устройство для восприятия уровня заполнения выполнено с возможностью на основании воспринятого камерой изображения выводить положение точки падения убранной массы относительно боковых границ грузового контейнера. За счет этого может, например, учитываться, что вблизи края грузового контейнера падающая убранная масса при достижении критической высоты заполнения более склонна к выходу из грузового контейнера, чем убранная масса, падающая в середину. При этом возможно соответствующее управление для влияния на скорость падения.
Согласно следующему предпочтительному решению по развитию изобретения устройство управления выполнено с возможностью привода в действие, чтобы при малом заполнении грузового контейнера обеспечивать, - например, посредством управления транспортирующим органом и/или посредством управления, по меньшей мере, одним исполнительным органом перегрузочного устройства, - режим перегрузки, при котором падающая в грузовой контейнер убранная масса достигает высокого уплотнения. При этом следует заметить, что малое заполнение может быть лишь локальным. При соответствующем восприятии измененный режим перегрузки предпочтительно обеспечивается только локально, так как, например, в других местах грузового контейнера уже достигнута критическая высота заполнения. В целом меры по изменению скорости падения предпочтительно предпринимаются в зависимости от места, то есть локально.
При заполнении грузового контейнера могут применяться различные стратегии. Согласно предпочтительной стратегии грузовой контейнер вначале заполняют по всей площади с высоким уплотнением убранной массы. Только по достижении критического уровня заполнения на всей площади дальше его заполняют с меньшим уплотнением индивидуально по участкам до тех пор, пока критический уровень заполнения не будет достигнут во всех областях грузового контейнера.
Альтернативно можно производить заполнение локально на одних и тех же местах или в одних и тех же областях грузового контейнера от нуля до критического уровня заполнения, причем в этом процессе производится регулирование скорости падения в соответствии с изобретением.
Предпочтительно устройство управления может быть выполнено с возможностью привода в действие, чтобы обеспечивать, - например, посредством управления транспортирующим органом и/или посредством управления, по меньшей мере, одним исполнительным органом перегрузочного устройства, - режим перегрузки, при котором убранная масса в точке падения падает примерно под прямым углом на верхнюю поверхность в грузовом контейнере. При этом в начальной фазе заполнения может достигаться высокое уплотнение убранной массы. В конечной фазе заполнения за счет этого могут устраняться потери убранной массы. Для такого регулирования предпочтительно учитывается контур верхней поверхности, воспринятый с помощью камеры.
Предпочтительно устройство управления выполнено с возможностью привода в действие, чтобы при приближении или достижении критического уровня заполнения обеспечивать, - например, посредством управления транспортирующим органом и/или посредством управления, по меньшей мере, одним исполнительным органом перегрузочного устройства, - режим перегрузки, при котором убранная масса в точке падения имеет скорость, не вызывающую потерь убранной массы или снижающую потери.
Предпочтительно уборочная машина по изобретению выполнена в виде самоходного полевого измельчителя.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны пример осуществления изобретения и различные примеры его применения. Из описания будут ясны другие особенности и преимущества изобретения. На чертежах:
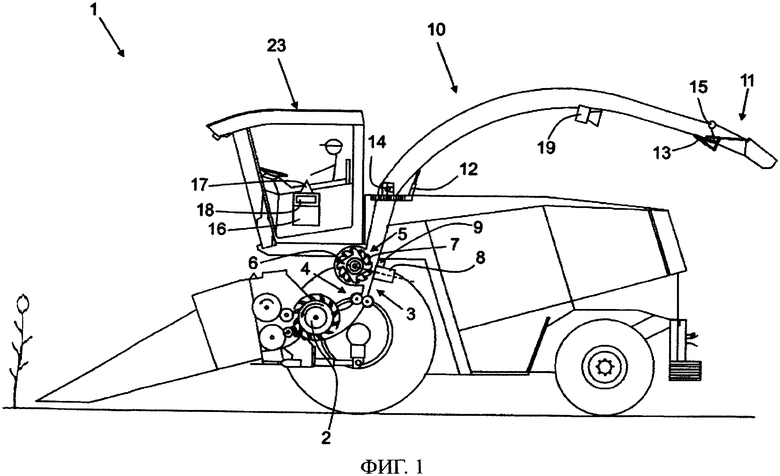
фиг.1 схематично изображает на виде сбоку уборочную сельхозмашину, выполненную в виде самоходного полевого измельчителя,
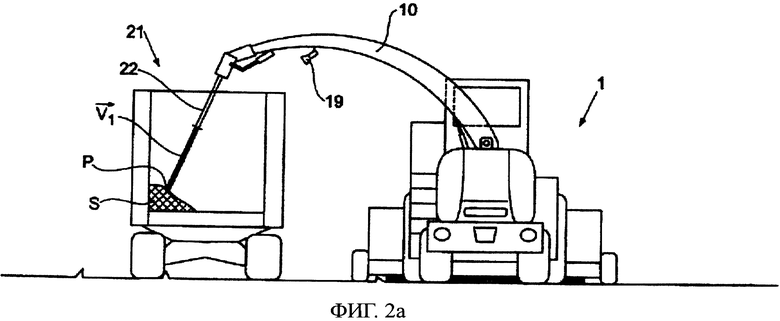
фиг.2a схематично изображает процесс боковой перегрузки в начале заполнения грузового контейнера,
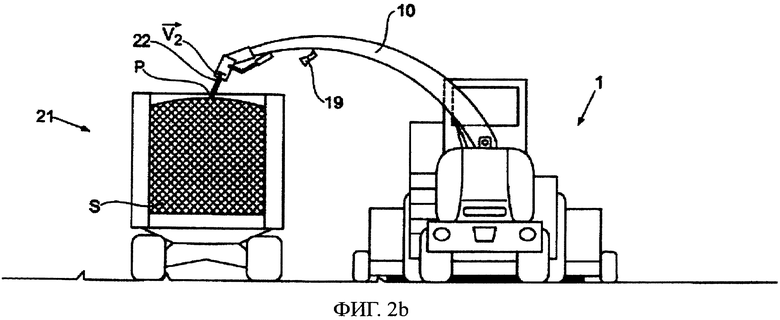
фиг.2b схематично изображает процесс боковой перегрузки в конце заполнения грузового контейнера,
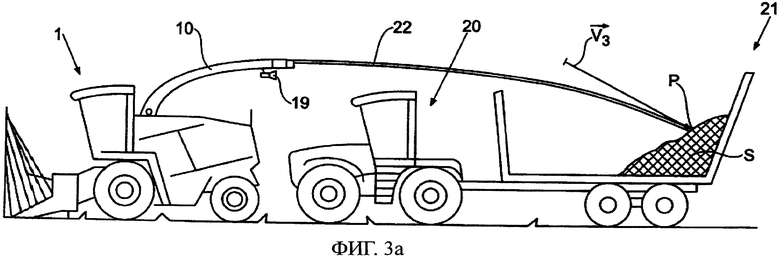
фиг.3a схематично изображает на виде сбоку процесс задней перегрузки в начале заполнения грузового контейнера,
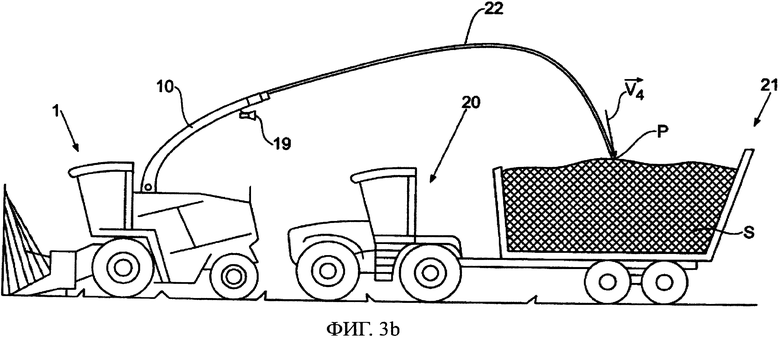
фиг.3b схематично изображает на виде сбоку процесс задней перегрузки в конце заполнения грузового контейнера.
Осуществление изобретения
На фиг.1 схематично показан на виде сбоку пример уборочной сельхозмашины по изобретению, выполненной в виде самоходного полевого измельчителя 1. Во время рабочего движения на уборке полевой измельчитель 1 с помощью навесного аппарата (не обозначен) срезает растительность с поля, чтобы подавать весь убранный растительный материал через приемные органы (не обозначены) к измельчительному аппарату 2. Там убранная масса известным образом измельчается и поступает в транспортирующую шахту 3, которая проходит от измельчительного аппарата 2, расположенного под кабиной 23 водителя, с подъемом в области за кабиной 23 водителя и выходит в перегрузочное устройство 10.
В транспортирующей шахте 3 расположено устройство 4 кондиционирования. Метатель 5 расположен за этим устройством 4 кондиционирования по направлению потока убранной массы. Метатель 5 содержит оснащенный множеством лопастей 7 барабан 6 метателя, который установлен с возможностью вращательного привода, чтобы ускорять убранную массу, поступающую в область действия лопастей 7, в направлении потока убранной массы с помощью воздушного потока, создаваемого лопастями 7. Ось вращения барабана 6 метателя может перемещаться (как это показано штриховой линией) посредством исполнительного мотора 8, так что проход (зазор) метателя, образованный между лопастями 7 и задней стенкой метателя (на чертеже она соответствует правой кромке транспортирующей шахты 3) может регулироваться приводными средствами. Поскольку барабан 6 метателя, кроме прочего, приводится вместе и измельчительным аппаратом 2, за счет реализованной возможности регулирования размера прохода, несмотря на остающееся прежним число оборотов привода обеспечивается возможность влияния на ускорение убранной массы, придаваемое ей метателем 5. Может быть предусмотрен датчик 9 ширины прохода, чтобы воспринимать установленную ширину прохода, которая при известном числе оборотов является мерой придаваемого метателем 5 ускорения. Для специалиста в данной области очевидно, что также и другие транспортирующие органы или транспортирующие органы, выполненные отличным от метателя 5 образом, могут обеспечивать изменяемое ускорение убранной массы.
Выполненное в виде разгрузочной трубы 10 перегрузочное устройство установлено (помимо прочего) с возможностью поворота с изменением высоты относительно рамы полевого измельчителя 1. Подъемный цилиндр 12 между рамой и разгрузочной трубой 10, служит для регулирования высоты разгрузочной трубы 10. Датчик 14 высоты, например, в виде поворотного потенциометра, может воспринимать (измерять) установленный угол поворота высотного положения.
На дальнем от машины конце разгрузочной трубы 10 расположен разгрузочный дефлектор 11, который за счет возможности его поворота позволяет влиять на угол выброса убранной массы из разгрузочной трубы 10. Перестановка разгрузочного дефлектора 11 осуществляется исполнительным цилиндром 13, при этом датчик 15 угла измеряет положение дефлектора. В комбинации с измеренным углом поворота высотного положения разгрузочной трубы (датчик 14) на основании углового положения разгрузочного дефлектора 11 может быть вычислен угол выброса относительно горизонтальной плоскости.
В ходе уборки для оптического восприятия достигнутой точки Р падения (см. точку «Р» на других чертежах) выбрасываемой убранной массы, а также для оптического восприятия положения, формы, размера и уровня заполнения грузового контейнера (см. другие чертежи) на разгрузочной трубе 10 установлена камера 19, направленная на целевую область выброса разгрузочной трубы 10.
В кабине 23 водителя, в которой имеется место для оператора машины, расположено устройство 16 управления в виде числового процессора сигналов. Устройству 16 управления подчинены блок 18 оптического вывода для предоставления информации оператору машины и выключатель 17 для активизации и деактивизации управления. Устройство 16 управления соединено сигнальными линиями, которые в целях наглядности не показаны, с исполнительными устройствами перегрузочного устройства 10, такими как подъемный цилиндр 12 и исполнительный цилиндр 13, и с датчиками, такими как датчик 9 ширины прохода, датчик 14 высоты, датчик 15 угла, а также с камерой 19. Для специалиста в данной области очевидно, что могут использоваться и другие или дополнительные исполнительные устройства и датчики.
Принцип действия полевого измельчителя 1 по изобретению будет далее пояснен со ссылками на фиг.2а, 2b и 3a, 3b, на которых в качестве примеров показаны процессы перегрузки из полевого измельчителя 1 в грузовой контейнер 21 в различных ситуациях. На фиг.2а, 2b и 3a, 3b в целях наглядности показан в упрощенном виде полевой измельчитель по фиг.1. Для пояснения отдельных имеющихся особенностей во избежание повторений дальнейший текст базируется на уже описанных примерах выполнения.
На фиг.2а и 2b полевой измельчитель 1 показан на виде сзади при рабочем движении уборки по полю при перегрузке убранной массы 22 в грузовой контейнер 21, находящийся сбоку рядом с полевым измельчителем 1, в различных ситуациях заполнения. На фиг.2а показано начало процесса заполнения грузового контейнера 21, а на фиг.2b показан конец процесса заполнения.
На фиг.2а полевой измельчитель 1 выбрасывает через разгрузочную трубу 10 убранную массу 22 в виде направленной струи убранной массы в грузовой контейнер 21. Как видно из схематичного изображения грузового контейнера 21 в разрезе, вначале он заполнен немного, как это показано скоплением насыпного груза S в левой нижней области грузового контейнера 21. Выбрасываемая убранная масса 22 падает в точку Р падения в грузовом контейнере 21, вследствие чего растет количество насыпного груза S. Расположенная на разгрузочной трубе 10 камера 19 оптически воспринимает точку Р падения убранной массы 22, а также размеры и степень заполнения грузового контейнера 21 и посредством обработки изображений передает данные об уровне заполнения грузового контейнера 21.
Поскольку грузовой контейнер 21 вначале заполнен ненамного, и его борта возвышаются далеко вверх, не существует опасности потерь, поэтому в соответствии с изобретением убранной массе 22 придается большое ускорение, чтобы она достигала точки Р падения с высокой скоростью V1 (что обозначено длинной стрелкой вектора), так что насыпной груз S имеет как можно более высокое уплотнение. За счет этого вместимость грузового контейнера может использоваться в большой мере.
При увеличении заполнения грузового контейнера 21 возрастает опасность потерь убранной массы. На фиг.2b, которая по сравнению с фиг.2а показывает продвинувшуюся ситуацию заполнения, камера 19 определяет, что достигнуто критическое заполнение грузового контейнера 21. Поэтому в соответствии с изобретением убранная масса 22 от полевого измельчителя 1, теперь падающая в значительно более высокую точку Р падения, теперь ускоряется значительно меньше (например, лишь настолько, чтобы предотвращалось забивание разгрузочной трубы 10) с тем, чтобы достигать точки Р падения с низкой скоростью V2 (что обозначено короткой стрелкой вектора). Низкая скорость V2 в точке Р падения предотвращает выброс убранной массы 22 через борт грузового контейнера 21, который теперь ненамного возвышается над ней.
Таким образом, в соответствии с изобретением согласно фиг.2а и 2b влияние на скорость падения убранной массы в зависимости от уровня заполнения грузового контейнера обеспечивает эффективный процесс загрузки. Для влияния на скорость падения используется изменение ускорения убранной массы в метателе 5, которое предпочтительно выполняется путем регулирования прохода (зазора) с помощью исполнительного мотора 8 (см. пояснения к фиг.1). Регулирование производится по команде устройства 16 управления, которое получает от камеры 19 существенные для регулирования данные об уровне заполнения.
На фиг.3a и 3b показано на виде сбоку следующее возможное применение изобретения при движении полевого измельчителя 1 по полю во время задней перегрузки убранной массы 22 в грузовой контейнер 21, транспортируемый тягачом 20 за полевым измельчителем 1, в различных ситуациях перегрузки.
На фиг.3a полевой измельчитель 1 выбрасывает через разгрузочную трубу 10 убранную массу 22 в виде полого направленной струи убранной массы (вначале она почти параллельна горизонтальной плоскости) в грузовой контейнер 21, который находится за тягачом 20. Как видно из схематичного изображения грузового контейнера 21 в разрезе, вначале он заполнен немного, как это показано скоплением насыпного груза S в задней области грузового контейнера 21. Выбрасываемая убранная масса 22 падает в точку Р падения в грузовом контейнере 21, вследствие чего растет количество насыпного груза S. Камера 19 оптически воспринимает точку Р падения убранной массы 22, а также размеры и степень заполнения грузового контейнера 21 и посредством обработки изображений передает данные об уровне заполнения грузового контейнера 21.
Следует заметить, что вместо камеры 19 может использоваться также другое или по-другому расположенное устройство для определения уровня заполнения грузового контейнера. Так например, альтернативно или дополнительно камера может быть расположена на грузовом контейнере 21, чтобы особенно при задней перегрузке лучше определять уровень заполнения, в частности, в другой перспективе, чем камера 19, расположенная на разгрузочной трубе 10. Возможно также использование весов для определения уровня заполнения грузового контейнера 21.
Поскольку в соответствии с фиг.2а грузовой контейнер 21 вначале заполнен ненамного и его борта возвышаются далеко вверх, не существует опасности потерь, поэтому в соответствии с изобретением убранной массе 22 придается большое ускорение, чтобы она достигала точки Р падения с высокой скоростью V3 (что обозначено длинной стрелкой вектора), так что насыпной груз S имеет как можно более высокое уплотнение. За счет этого вместимость грузового контейнера может использоваться в большой мере.
При увеличении заполнения грузового контейнера 21 возрастает опасность потерь убранной массы. При задней перегрузке эта опасность создается вследствие большей дальности выброса убранной массы до точки падения и, соответственно, более высокой мощности выброса.
На фиг.3b, которая по сравнению с фиг.3a показывает продвинувшуюся ситуацию заполнения, камера 19 посредством обработки изображений распознает, что достигнуто критическое заполнение грузового контейнера 21. Во избежание потерь убранной массы в соответствии с изобретением положение разгрузочной трубы 10 изменено таким образом, что убранная масса теперь выбрасывается в грузовой контейнер 21 по более высокой и крутой дугообразной траектории. Для этого разгрузочная труба 10 с помощью подъемного цилиндра 12 (см. фиг.1) установлена в более высокое положение. Кроме того, придаваемое метателем 5 ускорение снижено, что дает также экономию энергии.
Вследствие измененной траектории выброса на фиг.3b убранная масса 22 падает в точку Р падения в грузовом контейнере 21 с меньшей скоростью V4 (что обозначено короткой стрелкой вектора). За счет придания меньшей и почти вертикально направленной скорости V4 в точке Р падения предотвращается выдувание убранной массы 22 за борт грузового контейнера 21, который теперь ненамного возвышаются над ней.
Таким образом, в соответствии с изобретением согласно фиг.3a и 3b произведенное посредством изменения траектории выброса влияние на скорость падения убранной массы (в отношении величины и направления) в зависимости от уровня заполнения грузового контейнера обеспечивает эффективный процесс загрузки. Для влияния на скорость падения используется перестановка перегрузочного устройства 10 и изменение ускорения убранной массы в метателе 5, которое предпочтительно выполняется путем регулирования прохода с помощью исполнительного мотора 8 (см. пояснения к фиг.1). Регулирование производится по команде устройства 16 управления, которое получает от камеры 19 существенные для регулирования данные об уровне заполнения.
Следует отметить, что ситуации перегрузки по фиг.2а, 2b и 3a, 3b отражают примеры применения изобретения. Влияние на скорость в точке падения (в отношении величины и/или направления) может достигаться также другими мерами или комбинациями мер.
Перечень условных обозначений
| название | год | авторы | номер документа |
|---|---|---|---|
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2012 |
|
RU2596143C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2012 |
|
RU2593322C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПЕРЕГРУЗКОЙ УБРАННОЙ МАССЫ | 2012 |
|
RU2583680C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2009 |
|
RU2495558C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2011 |
|
RU2565727C2 |
| СПОСОБ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ, УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УБОРОЧНОЙ МАШИНЫ И УБОРОЧНАЯ МАШИНА | 2006 |
|
RU2405300C2 |
| САМОХОДНАЯ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УПРАВЛЯЕМЫМ ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2476061C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2457662C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УСТРОЙСТВОМ ОБНАРУЖЕНИЯ ПОСТОРОННИХ ТЕЛ | 2008 |
|
RU2466527C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ АППАРАТОМ | 1999 |
|
RU2245611C2 |
Изобретение относится к области сельскохозяйственного машиностроения и может применяться в уборочных машинах. Уборочная сельхозмашина содержит транспортирующий орган для ускорения убранной массы. За транспортирующим органом расположено перегрузочное устройство. Через перегрузочное устройство ускоренная убранная масса выбрасывается с ее падением в точке падения в грузовом контейнере. Дополнительно сельхозмашина содержит устройство для восприятия уровня заполнения грузового контейнера и средства для изменения скорости убранной массы в точке падения в зависимости от уровня заполнения грузового контейнера. Повышается эффективность перегрузки за счет улучшения использования вместимости грузовых контейнеров и устранения потерь убранной массы. 12 з.п. ф-лы, 5 ил.
1. Уборочная сельхозмашина (1), содержащая, по меньшей мере, один транспортирующий орган (5) для ускорения убранной массы (22) и расположенное за транспортирующим органом (5) перегрузочное устройство (10), выполненное с возможностью выброса ускоренной убранной массы (22) с ее падением в точке (Р) падения в грузовом контейнере (21), отличающаяся тем, что содержит устройство (19) для восприятия уровня заполнения грузового контейнера (21), а также средства (8, 12, 13, 16) для изменения скорости убранной массы (22) в точке (Р) падения в зависимости от уровня заполнения грузового контейнера (21).
2. Уборочная сельхозмашина по п.1, отличающаяся тем, что содержит устройство (16) управления, выполненное с возможностью изменения ускорения убранной массы (22) посредством управления транспортирующим органом (5).
3. Уборочная сельхозмашина по п.2, отличающаяся тем, что транспортирующий орган представляет собой метатель (5), причем ускорение убранной массы (22) может изменяться посредством регулирования числа оборотов и/или ширины прохода и/или установки лопастей, и/или подачи воздуха метателя (5).
4. Уборочная сельхозмашина по п.1, отличающаяся тем, что содержит устройство (16) управления, выполненное с возможностью изменения влияющего на траекторию выброса убранной массы (22) состояния перегрузочного устройства (10) посредством управления, по меньшей мере, одним исполнительным органом (12, 13), относящимся к перегрузочному устройству (10).
5. Уборочная сельхозмашина по п.4, отличающаяся тем, что для перегрузочного устройства (10) предусмотрен исполнительный орган (12) для регулирования его высотного положения и/или исполнительный орган (13) для изменения угла выброса и/или исполнительный орган для регулирования длины перегрузочного устройства, причем исполнительный орган (12, 13) выполнен с возможностью управления посредством устройства (16) управления.
6. Уборочная сельхозмашина по п.1, отличающаяся тем, что устройство для восприятия уровня заполнения содержит направленную на точку (Р) падения убранной массы (22) камеру (19), причем устройство выполнено с возможностью выводить на основании воспринятого камерой (19) изображения уровень заполнения грузового контейнера (21).
7. Уборочная сельхозмашина по п.1, отличающаяся тем, что уровень заполнения содержит данные о высоте заполнения, по меньшей мере, в одной области грузового контейнера (21).
8. Уборочная сельхозмашина по п.1, отличающаяся тем, что уровень заполнения содержит данные о контуре заполнения, по меньшей мере, в одной области грузового контейнера (21).
9. Уборочная сельхозмашина по любому из пп.6-8, отличающаяся тем, что устройство для восприятия уровня заполнения выполнено с возможностью выводить на основании воспринятого камерой (19) изображения положение точки (Р) падения убранной массы (22) относительно боковых границ грузового контейнера (21).
10. Уборочная сельхозмашина по любому из пп.1-8, отличающаяся тем, что устройство (16) управления выполнено с возможностью обеспечения при малом заполнении грузового контейнера (21) режима перегрузки, при котором падающая в грузовой контейнер (21) убранная масса (22) достигает высокого уплотнения.
11. Уборочная сельхозмашина по любому из пп.1-8, отличающаяся тем, что устройство (16) управления выполнено с возможностью обеспечения режима перегрузки, при котором убранная масса (22) в точке (Р) падения падает примерно под прямым углом на поверхность в грузовом контейнере (21).
12. Уборочная сельхозмашина по любому из пп.1-8, отличающаяся тем, что устройство (16) управления выполнено с возможностью обеспечения, при приближении или достижении критического уровня заполнения, режима перегрузки, при котором убранная масса (22) в точке (Р) падения имеет скорость, не вызывающую потерь убранной массы.
13. Уборочная сельхозмашина по любому из пп.1-8, отличающаяся тем, что выполнена в виде самоходного полевого измельчителя (1).
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ УРОВНЯ СЫПУЧИХ МАТЕРИАЛОВ | 1998 |
|
RU2138027C1 |
| СПОСОБ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ, УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УБОРОЧНОЙ МАШИНЫ И УБОРОЧНАЯ МАШИНА | 2006 |
|
RU2405300C2 |
| EP 1380204 A1, 14.01.2004 | |||
| EA 200901132 A1, 30.04.2010. | |||

