Изобретение относится к движителям и может быть использовано на морских судах.
Недостатком известных устройств [1-3] является ламинарное перемещение водного потока, что не позволяет получить большую тягу и управляемость.
Целью предлагаемого изобретения является увеличение мощности и управляемости магнитогидродинамического программно-управляемого вихревого двигателя для морских микродронов.
Техническим результатом является воздействие магнитным полем на анионы и катионы морской воды таким образом, что водный поток приобретет вихревую структуру с возможностью программного управления вектором тяги.
Указанный технический результат достигается тем, что магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов выполняется в виде двух цилиндрических металлических электродов вложенных друг друга с тремя электромагнитами, расположенными в форме правильного треугольника и при подаче трехфазных синусоидальных сигналов возникнет вращающееся магнитное поле в пространстве между цилиндрическими электродами, в результате чего анионы морской воды будут смещаться в сторону положительного электрода по радиальному направлению, а катионы будут двигаться им навстречу, что приведет под действием силы Лоренца к вихревому вращению в пространстве между цилиндрическими электродами с одновременным выталкиванием их вдоль образующей цилиндрических поверхностей, причем программное изменение параметров амплитуд и частоты синусоид позволяют осуществить управление вектором тяги двигателя.
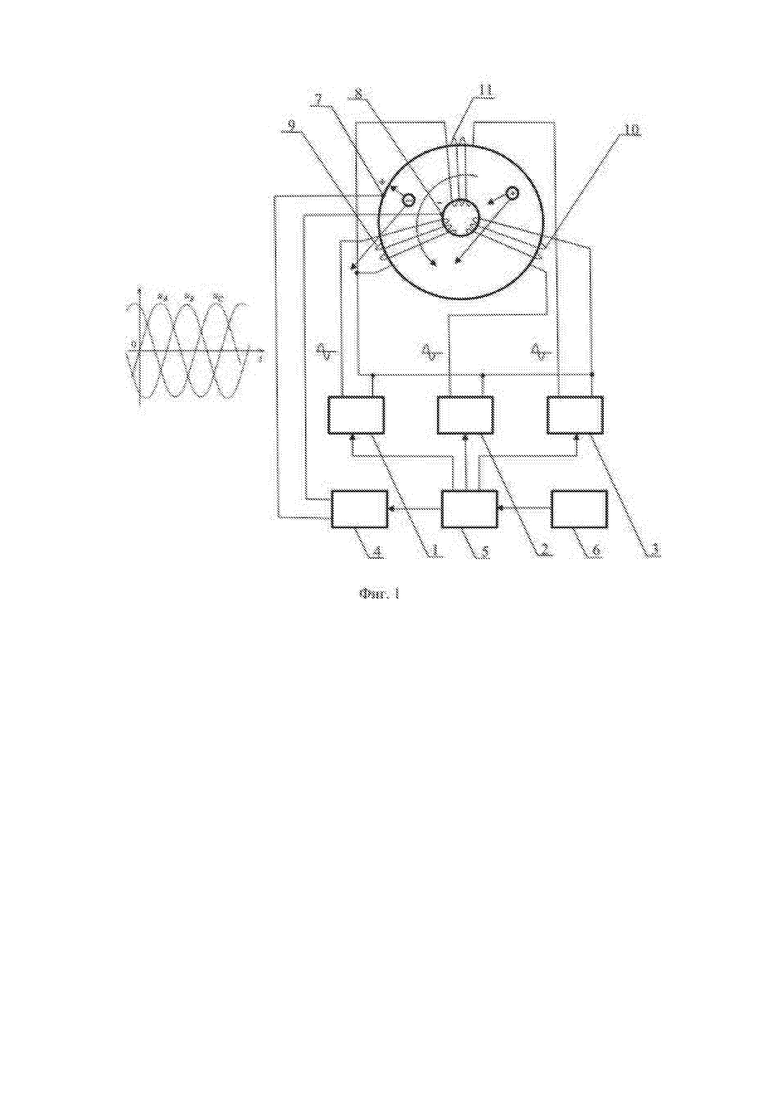
На фиг.1 изображена схема магнитогидродинамического программно-управляемого вихревого двигателя для морских микродронов.
Контроллер 6 через интерфейс 5 формирует при помощи ЦАП 4 разность потенциалов между цилиндрическими металлическими положительным электродом 7 и отрицательным электродом 8. В пространстве между цилиндрическими металлическими электродами 7 и 8 анионы и катионы начнут движение под действием электрического поля. Анионы приобретут радиальное смещение в сторону отрицательного цилиндрического металлического электрода 8, а катионы будут двигаться им навстречу в сторону положительного цилиндрического металлического электрода 7. При помощи ЦАП 1, 2, 3 контроллер 6 формирует трехфазное синусоидальное колебание, подаваемое на электромагнитные катушки 9, 10, 11 соответственно. В результате, будет сформировано вращающееся магнитное поле, имеющее сходство с аналогичными процессами в асинхронном трехфазном электродвигателе. Это вращающееся магнитное поле при помощи силы Лоренца придаст анионам и катионам вихревое вращательное вокруг цилиндрической оси и поступательное вдоль цилиндрической оси движение. В результате будет получено не ламинарное поступательное движение жидкости, как в обычном магнитогидродинамическом двигателе [1-3], а более мощное и устойчивое вихревое движение жидкости. Причем, контроллер 6 может управлять вектором тяги при изменении посредством ЦАП 1, 2, 3 параметров трехфазного синусоидального колебания таким образом, чтобы в выбранных секторах цилиндрической поверхности магнитное поле имело большую амплитуду и, следовательно, формировалась большая тяга в этом направлении. Таким образом, микродрон способен программно управлять вектором тяги двигателя для перемещения в выбранном направлении с заданной скоростью.
Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов предназначен для функционирования в широком диапазоне глубин и параметров окружающей среды, при этом он обладает большей энергоэффективностью и надежностью.
Литература
1. Патент РФ №2327597. Электромагнитный движитель / Герасимов Н.П., Легуша Ф.Ф., Поляшев Б.М.
2. Патент РФ №2271302. Способ перемещения тела в морской воде и устройство для его реализации / Дозоров Т.А., Смирнов Г.В.
3. Патент РФ №2280587. Движитель для перемещения судна в морской воде / Дозоров Т.А.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов | 2018 |
|
RU2686342C1 |
| Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов | 2018 |
|
RU2684664C1 |
| Магнитогидродинамический насос | 2018 |
|
RU2700575C1 |
| Импульсный движитель для морских сред | 2018 |
|
RU2709082C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ТЕЛА В МОРСКОЙ ВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2271302C1 |
| МАГНИТОДИНАМИЧЕСКИЙ КОНДУКЦИОННЫЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2057681C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ИЗМЕНЯЕМОЙ СИЛЫ ТЯГИ ИЛИ УПОРА | 2006 |
|
RU2314969C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОЙ ЭЛЕКТРОПРОВОДНОСТИ ЖИДКИХ СРЕД | 2015 |
|
RU2654316C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СИЛЫ УПОРА (ВАРИАНТЫ) | 2006 |
|
RU2313467C2 |
| ДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ СУДНА В МОРСКОЙ ВОДЕ (ВАРИАНТЫ) | 2004 |
|
RU2280587C1 |
Изобретение относится к движителям и может быть использовано на морских судах. Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов выполнен в виде двух цилиндрических металлических электродов, вложенных друг в друга, с тремя электромагнитами. Электромагниты расположены в форме правильного треугольника. При подаче трехфазных синусоидальных сигналов возникает вращающееся магнитное поле в пространстве между цилиндрическими электродами, в результате чего анионы морской воды будут смещаться в сторону положительного электрода по радиальному направлению, а катионы будут двигаться им навстречу, что приведет под действием силы Лоренца к вихревому вращению в пространстве между цилиндрическими электродами с одновременным выталкиванием их вдоль образующей цилиндрических поверхностей. Программное изменение параметров амплитуд и частоты синусоид позволяет осуществить управление вектором тяги двигателя. Достигается программное управление вектором тяги. 1 ил.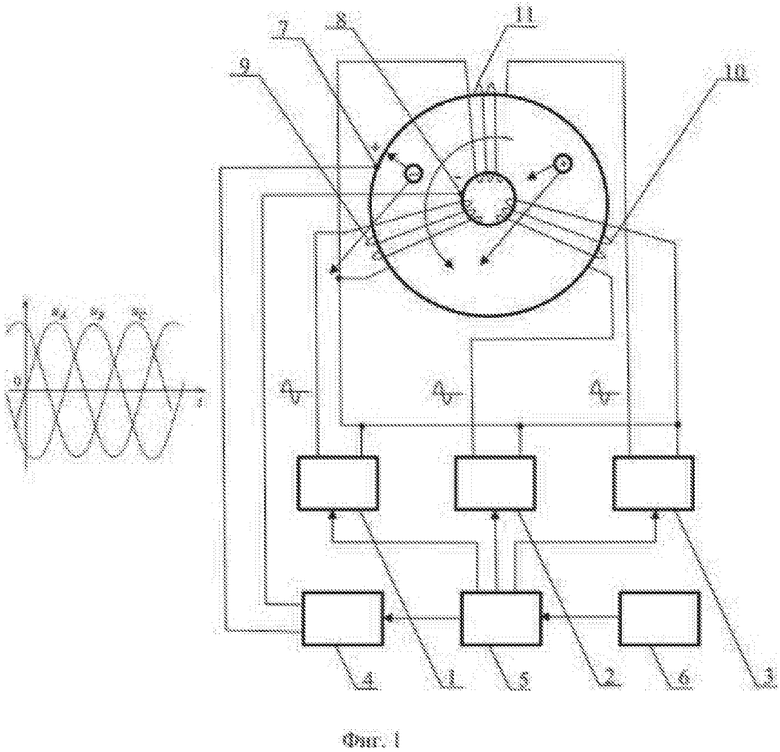
Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов, выполненный в виде двух цилиндрических металлических электродов, вложенных друг в друга, с тремя электромагнитами, расположенными в форме правильного треугольника, отличающийся тем, что при подаче трехфазных синусоидальных сигналов возникает вращающееся магнитное поле в пространстве между цилиндрическими электродами, в результате чего анионы морской воды будут смещаться в сторону положительного электрода по радиальному направлению, а катионы будут двигаться им навстречу, что приведет под действием силы Лоренца к вихревому вращению в пространстве между цилиндрическими электродами с одновременным выталкиванием их вдоль образующей цилиндрических поверхностей, причем программное изменение параметров амплитуд и частоты синусоид позволяет осуществить управление вектором тяги двигателя.
| US 5333444 A1, 02.08.1994 | |||
| US 2997013 A1, 22.08.1961 | |||
| ДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ СУДНА В МОРСКОЙ ВОДЕ (ВАРИАНТЫ) | 2004 |
|
RU2280587C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2003 |
|
RU2237892C1 |
| RU 2002108589 A, 20.01.2005. | |||

