Изобретение относится к радиолокации.
Известна цифровая активная фазированная антенная решетка (ЦАФАР), у которой все приемопередающие модули расположены в одной плоскости [1]. Однако излучение от такой ЦАФАР не позволяет скрытно провести пеленгацию объектов без обнаружения собственных координат.
Цель изобретения — повышение эффективности ЦАФАР за счет применения магнитогидродинамического излучателя гидроакустических колебаний размещенных на морских микродронах в составе «стаи».
Техническим результатом является скрытная пеленгация надводных и подводных объектов по результатам обработки информации от ЦАФАР «стаи» морских микродронов.
Указанный технический результат достигается тем, что программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов реализована в форме распределенных компонентов единой системы и каждый микродрон управляемый бортовым микроконтроллером в строго определенные моменты времени выдает или принимает импульсные сигналы при помощи магнитогидродинамического излучателя гидроакустических колебаний, причем моменты передачи или приема для каждого микродрона в зависимости от его подводных координат индивидуально подбираются управляющим командным микродроном таким образом, что только в определенной точке сканируемого пространства сигналы будут синхронизированы для пеленгации объекта, причем уровень облучающих сигналов будет меньше уровня природных акустических помех и не позволит провести обнаружение как самого факта пеленгации, так и обнаружить местоположение микродронов.
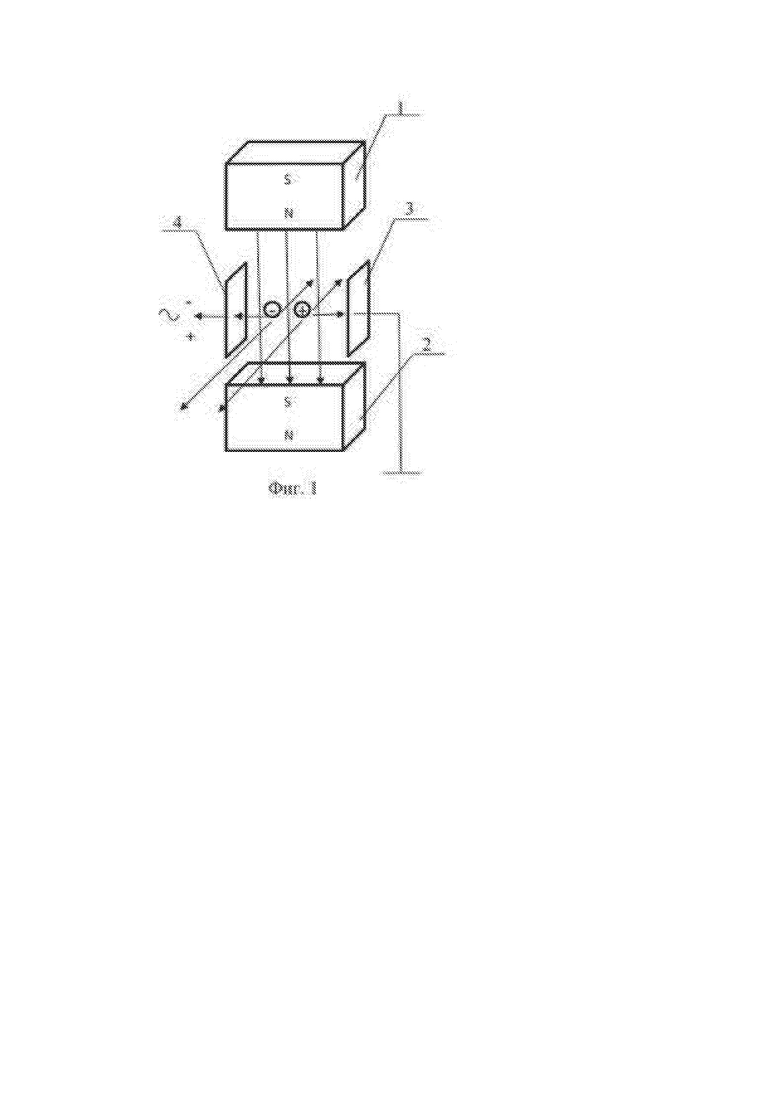
На фиг. 1 изображена схема функционирования магнитогидродинамического излучателя гидроакустических колебаний. Магнит 1 направлен северным полюсом в сторону южного полюса магнита 2. На электрод 3 подается нулевой потенциал, а на электрод 4, относительно электрода 3, подается либо отрицательный, либо положительный потенциалы. Если на электрод 4 подан отрицательный потенциал, то анионы будут двигаться в сторону отрицательного потенциала, а катионы им навстречу в сторону нулевого потенциала на электроде 3. Под действием силы Лоренца они будут смещаться ортогонально в одну сторону поперек магнитных и электрических силовых линий. Если же на электрод 4 будет подан положительный потенциал, то анионы и катионы будут двигаться в противоположном направлении. Таким образом, можно формировать акустические колебания в жидкой электролитической среде без промежуточных устройств в виде пьезоэлектрических излучателей и т.д. Причем, диапазон колебаний у такого излучателя может быть любым от 0 и до 10 МГц, т.к. отсутствуют механические структуры с собственными резонансными частотами с нелинейными погрешностями.
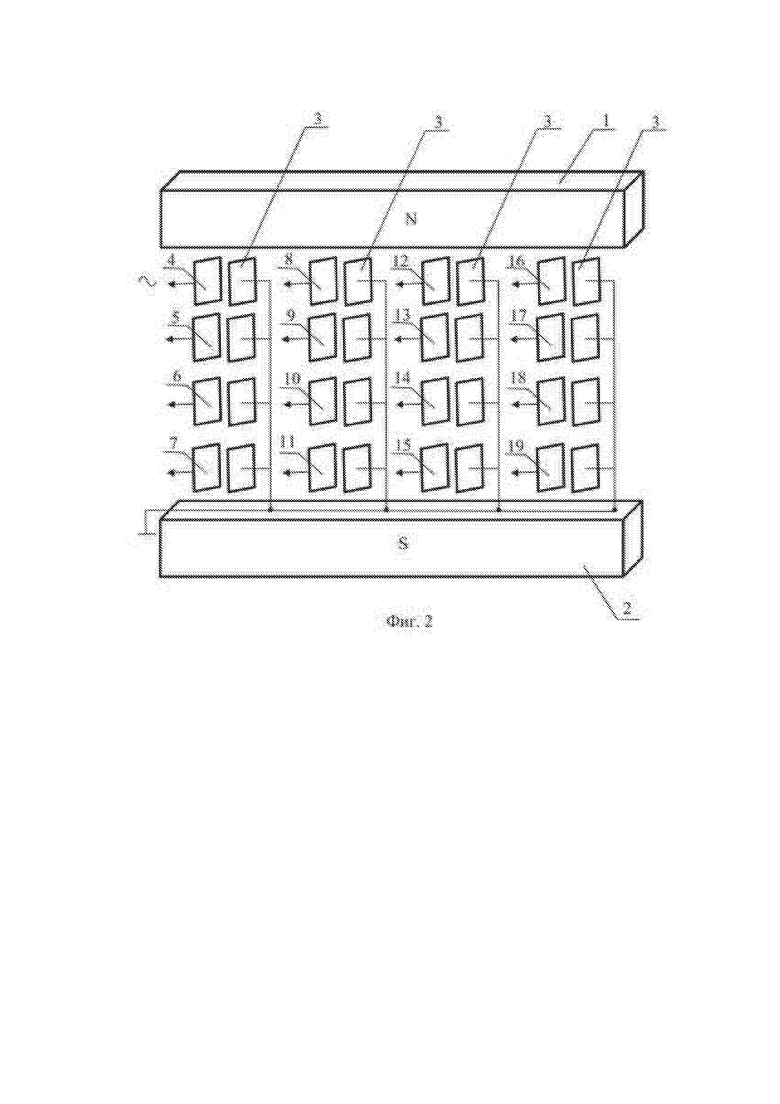
На фиг. 2 приведена примерная схема магнитогидродинамической гидроакустической ЦАФАР для морских микродронов в виде шестнадцати излучателей. Магниты 1 и 2 являются общими для всех излучателей гидроакустических колебаний также, как и нейтральный электрод 3 с нулевым потенциалом. Электроды 4-19 в индивидуальном порядке получают сигналы с различными задержками от бортового микроконтроллера морского микродрона. Программным способом можно формировать различные задержки, позволяющие осуществить прием и передачу гидроакустических сигналов в выбранном направлении.
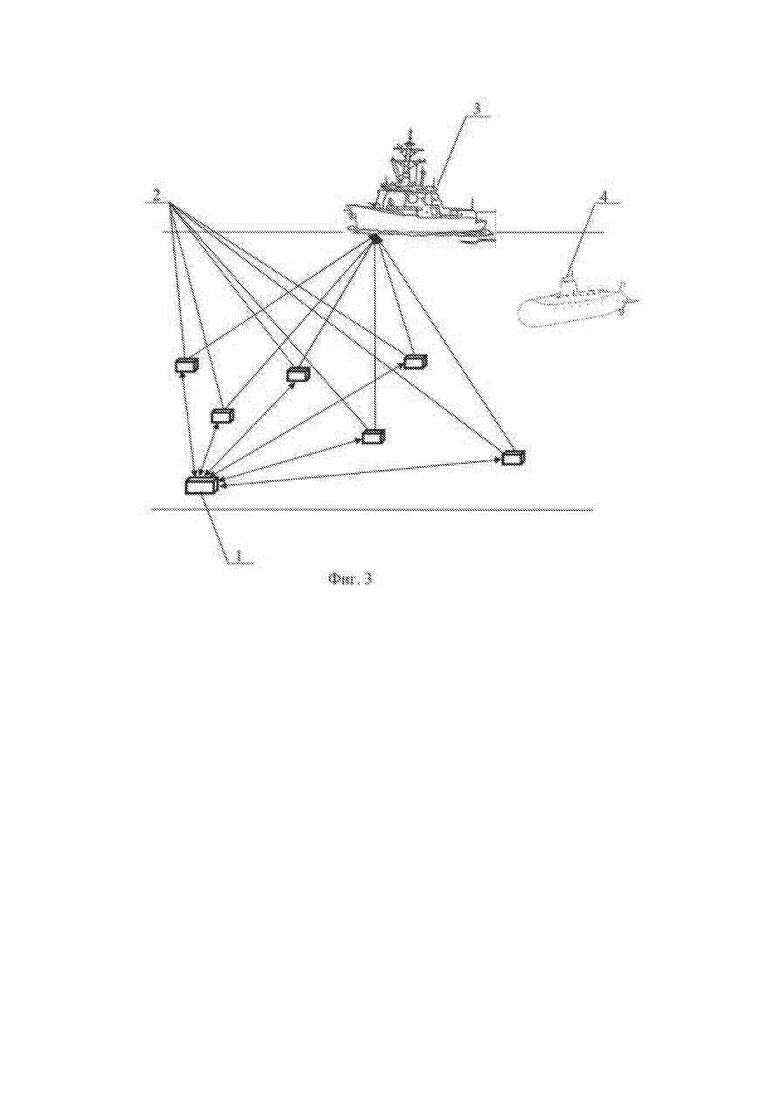
На фиг. 3 приведена схема пеленгации надводного судна 3 или подводной лодки 4 при помощи «стаи» морских микродронов. Управляющий командный микродрон 1 имеет информацию о координатах всех микродронов 2 «стаи». Для обнаружения пеленгуемого объекта 3 каждый микродрон 2 получает необходимую информацию о том, в каком направлении, с какой частотой, с какой фазой, и с какой амплитудой послать гидроакустический сигнал. Уровень сигнала ЦАФАР каждого микродрона задается меньше уровня гидроакустических природных помех. Таким образом, пеленгуемый объект 3 не способен обнаружить момент его сканирования для принятия мер противодействия. В то же время управляющий командный микродрон 1 просуммирует все сигналы от микродронов 2 «стаи» и полезный сигнал от пеленгуемого объекта 3 окажется больше по уровню, чем гидроакустические природные помехи. Возможен режим, при котором суммарный гидроакустический сигнал всех микродронов 2 «стаи» будет нулевым за счет заданной интерференции, а это позволит также надежно провести пеленгацию объекта 3, причем сам объект в этом случае, практически не сможет обнаружить сам факт, что его запеленговали.
Программно-управляемая гидроакустическая ЦАФАР на базе «стаи» морских микродронов позволяет с высокой достоверностью и надежностью осуществить скрытную пеленгацию подводных и надводных объектов.
Литература
1. Цифровая активная фазированная антенная решетка: патент №2617457.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Способ формирования эллиптической диаграммы направленности цифровой активной фазированной антенной решетки на базе "стаи" микроспутников с применением сверхрегенеративных приемопередающих устройств | 2018 |
|
RU2680850C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| Корабль освещения подводной обстановки | 2018 |
|
RU2693767C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| Имитатор надводной и подводной цели | 2021 |
|
RU2761688C1 |
| ПОДВОДНЫЙ ПОМЕХОПОСТАНОВЩИК | 2016 |
|
RU2662573C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
Изобретение относится к радиолокации. Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов реализована в форме распределенных компонентов единой системы и каждый микродрон, управляемый бортовым микроконтроллером, в строго определенные моменты времени выдает или принимает импульсные сигналы при помощи магнитогидродинамического излучателя гидроакустических колебаний. Причем моменты передачи или приема для каждого микродрона в зависимости от его подводных координат индивидуально подбираются управляющим командным микродроном таким образом, что только в определенной точке сканируемого пространства сигналы будут синхронизированы для пеленгации объекта, причем уровень облучающих сигналов будет меньше уровня природных акустических помех и не позволит провести обнаружение как самого факта пеленгации, так и обнаружить местоположение микродронов. Технический результат заключается в возможности скрытной пеленгации надводных и подводных объектов по результатам обработки информации от ЦАФАР «стаи» морских микродронов. 3 ил.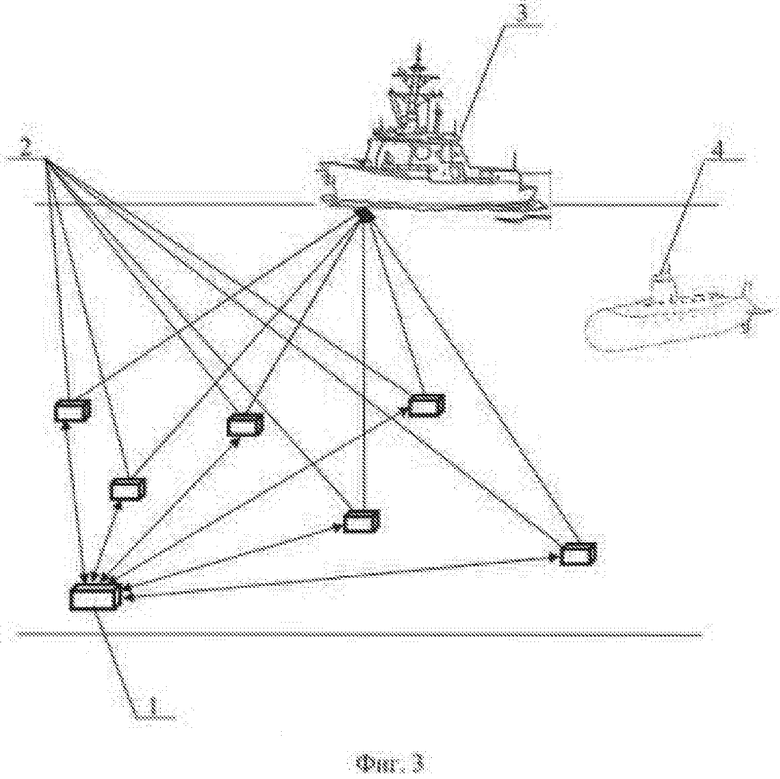
Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов реализована в форме распределенных компонентов единой системы, отличающаяся тем, что каждый микродрон, управляемый бортовым микроконтроллером, в строго определенные моменты времени выдает или принимает импульсные сигналы при помощи магнитогидродинамического излучателя гидроакустических колебаний, причем моменты передачи или приема для каждого микродрона в зависимости от его подводных координат индивидуально подбираются управляющим командным микродроном таким образом, что только в определенной точке сканируемого пространства сигналы будут синхронизированы для пеленгации объекта, причем уровень облучающих сигналов будет меньше уровня природных акустических помех и не позволит провести обнаружение как самого факта пеленгации, так и местоположения микродронов.
| БУКСИРУЕМЫЙ МОДУЛЬ ПОДВОДНОЙ АНТЕННОЙ РЕШЕТКИ | 1991 |
|
RU2014631C1 |
| Устройство для определения процентного соотношения минералов, содержащихся в горных породах | 1954 |
|
SU104732A1 |
| US 5550792 A, 27.08.1996 | |||
| МАТЕРИАЛЫ XI МЕЖДУНАРОДНОЙ НАУЧНОТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ "СОВРЕМЕННЫЕ МЕТОДЫ И СРЕДСТВА ОКЕАНОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ", часть II | |||
| М., 2009, с.88-91. | |||

