Изобретение относится к движителям и может быть использовано на морских судах.
Недостатком известных устройств [1-3] является перемещение водного потока, что приводит к возникновению паразитных вихревых потоков и энергетическим потерям.
Целью предлагаемого изобретения является увеличение мощности и управляемости магнитогидродинамического программно-управляемого шагового двигателя для морских микродронов.
Техническим результатом является воздействие магнитным полем на анионы и катионы морской воды таким образом, что сам двигатель вместе с микродроном приобретет вращательно-поступательное движение, а сама морская вода будет оставаться практически неподвижной.
Указанный технический результат достигается тем, что магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов выполняется в виде двух цилиндрических труб вложенных друг друга с ортогонально размещенными электромагнитами и при пошаговом изменении силы тока в электромагнитах будет изменяться скорость истечения жидкости в зависимости от выбранного направления движения, причем, так как масса выталкиваемой жидкости будет превышать массу самого двигателя, вода будет оставаться неподвижной, а сам двигатель приобретет вращательно-поступательное движение с возможностью программно-управляемого маневрирования в любом направлении.
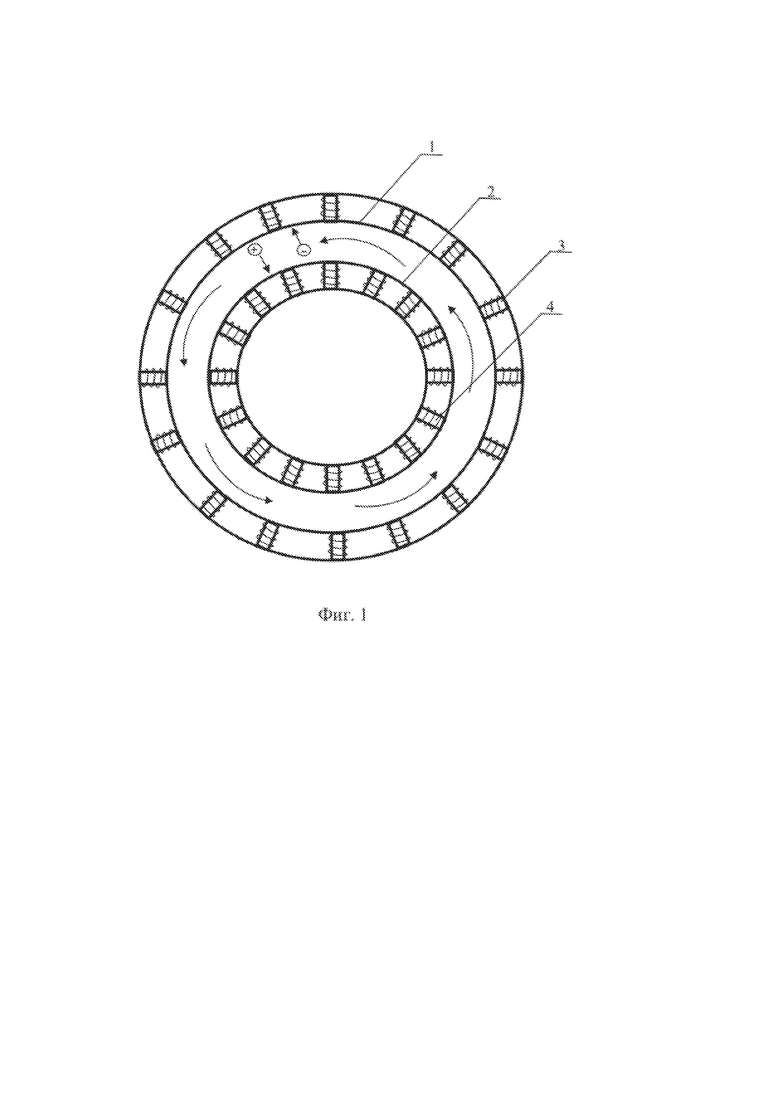
На фиг. 1 изображена схема магнитогидродинамического программно-управляемого шагового двигателя для морских микродронов. Металлический цилиндрический электрод 1 соединен с положительным полюсом источника питания, а металлический цилиндрический электрод 2 соединен с отрицательным полюсом источника питания. Под действием этих потенциалов положительные анионы в морской воде будут двигаться по радиальным направлениям от положительного электрода к отрицательному. Отрицательные катионы будут двигаться им навстречу. Шаговые электромагниты 3 на внешней трубе, расположены попарно с такими же электромагнитами 4 на внутренней трубе для формирования магнитного поля, которое при помощи силы Лоренца будет создавать взаимное отталкивание внешней и внутренней труб относительно анионов и катионов. Программное переключение электромагнитов приведет к возможности создания кругового перемещения импульса выталкивания. Если обе трубы закреплены, то в этом случае возникает вихревое движение жидкости с одновременным ее выталкиванием из пространства между внешней и внутренней трубой. Если же трубы не закреплены и масса двигателя меньше массы выталкиваемой воды, то вода будет оставаться практически неподвижной, а двигатель приобретет вращательно-поступательное движение. Управление скоростью вращения можно запрограммировать, изменяя скорость пошагового переключения электромагнитов, а изменяя величину потенциала на электродах и ток в шаговых электромагнитах, можно изменять скорость поступательного движения. Программно можно задавать, как поочередное одиночное включение пары ортогональных электромагнитов при выключенных всех остальных электромагнитах, так и увеличить количество включенных пар ортогональных электромагнитов до значения, при котором все электромагниты включены и по очереди по кругу каждая пара последовательно отключается. Если при переключении программно изменять силу тока в паре ортогональных электромагнитов таким образом, что в каком-либо секторе сила тока будет больше, чем в противоположном секторе, то в этом случае можно управлять не только скоростью вращения и поступательного движения, но и изменять произвольно вектор движения.
Так как, в движении участвует только сам микродрон с двигателем в виде цилиндрической трубы, а водная среда остается практически неподвижной, то это позволит осуществить практически бесшумное перемещение, а фактор малошумности имеет большое значение для военного применения и экологической безопасности.
Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов способен работать на любых глубинах и при любых климатических условиях с высокой энергоэффективностью и управляемостью.
Литература
1. Патент РФ №2327597. Электромагнитный движитель / Герасимов Н.П., Легуша Ф.Ф., Поляшев Б.М.
2. Патент РФ №2271302. Способ перемещения тела в морской воде и устройство для его реализации / Дозоров Т.А., Смирнов Г.В.
3. Патент РФ №2280587. Движитель для перемещения судна в морской воде / Дозоров Т.А.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитогидродинамический программно-управляемый вихревой двигатель для морских микродронов | 2018 |
|
RU2686124C1 |
| Устройство для доставки углеводородов в арктическом бассейне | 2018 |
|
RU2700518C1 |
| ДВИЖИТЕЛЬ (ВАРИАНТЫ) И СПОСОБ ДВИЖЕНИЯ ТЕЛА | 2018 |
|
RU2772948C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2011 |
|
RU2468488C1 |
| МОРСКОЙ ДВИЖИТЕЛЬ С ВЕРТИКАЛЬНОЙ ОСЬЮ И ПОПЕРЕЧНЫМ РАСПОЛОЖЕНИЕМ ОТНОСИТЕЛЬНО НАПРАВЛЕНИЯ ПОТОКА, С ПОСТОЯННОЙ УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ ЛОПАСТЕЙ | 1997 |
|
RU2179521C2 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| ВЕДОМЫЙ ДВИЖИТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИНТЕРВЕНЦИОННЫМ ХИРУРГИЧЕСКИМ РОБОТОМ | 2020 |
|
RU2763670C1 |
| КЛАПАН | 2004 |
|
RU2282770C2 |
| СУДОВОЕ ПОДРУЛИВАЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2700080C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УДЕЛЬНОЙ ЭЛЕКТРОПРОВОДНОСТИ ЖИДКИХ СРЕД | 2015 |
|
RU2654316C2 |
Изобретение относится к судовым реактивным движителям. Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов выполнен в виде двух цилиндрических труб вложенных друг в друга с ортогонально размещёнными электромагнитами. Электромагниты на внешней трубе расположены попарно с электромагнитами на внутренней трубе для формирования магнитного поля. При пошаговом изменении силы тока в электромагнитах будет изменяться скорость истечения жидкости в зависимости от выбранного направления движения. Причем, так как масса выталкиваемой жидкости будет превышать массу самого двигателя, вода будет оставаться неподвижной, а сам двигатель приобретет вращательно-поступательное движение с возможностью программно-управляемого маневрирования в любом направлении. Технический результат заключается в том, что сам двигатель вместе с микродроном приобретает вращательно-поступательное движение. 1 ил.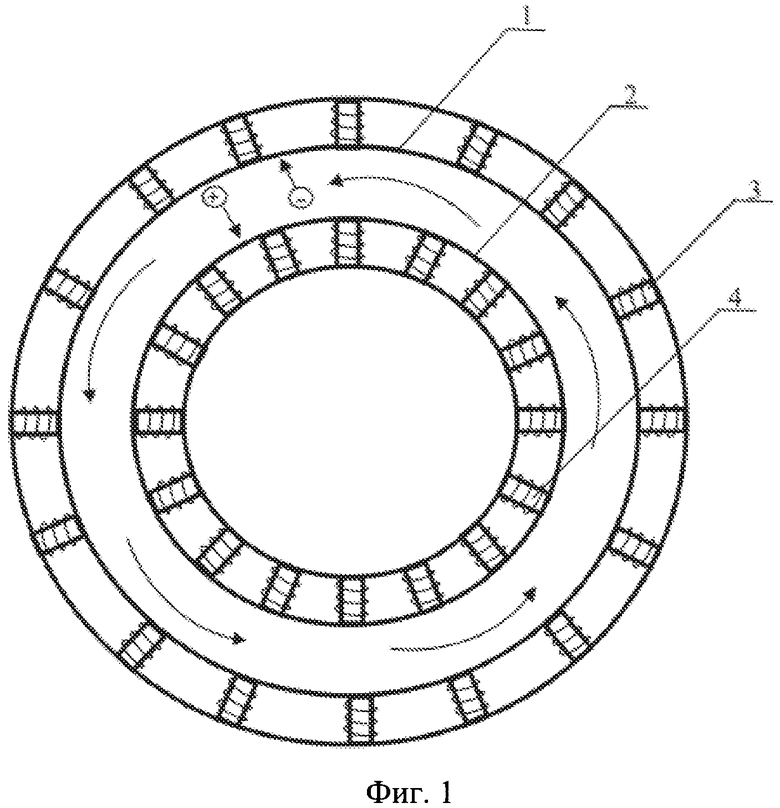
Магнитогидродинамический программно-управляемый шаговый двигатель для морских микродронов, выполненный в виде двух цилиндрических труб, вложенных друг в друга с ортогонально размещёнными электромагнитами, отличающийся тем, что при пошаговом изменении силы тока в электромагнитах будет изменяться скорость истечения жидкости в зависимости от выбранного направления движения, причем, так как масса выталкиваемой жидкости будет превышать массу самого двигателя, вода будет оставаться неподвижной, а сам двигатель приобретет вращательно-поступательное движение с возможностью маневрирования в любом направлении.
| US 5333444 A, 02.08.1994 | |||
| US 2997013 A, 22.08.1961 | |||
| ЭЛЕКТРОД ДЛЯ ЭЛЕКТРОДНОГО НАГРЕВАТЕЛЯ ЖИДКОСТИ | 1999 |
|
RU2168873C1 |
| ГИГИЕНИЧЕСКОЕ АБСОРБИРУЮЩЕЕ ИЗДЕЛИЕ С КРЫЛЫШКАМИ (ВАРИАНТЫ) | 1998 |
|
RU2217117C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ИЗМЕНЯЕМОЙ СИЛЫ ТЯГИ ИЛИ УПОРА | 2006 |
|
RU2314969C1 |
| Двигатель внутреннего горения с вращающимися, радиально расположенными цилиндрами простого действия | 1925 |
|
SU848A1 |

