Родственные заявки
По настоящей заявке испрашивается приоритет в соответствии с предварительной заявкой на выдачу патента США №62/167,015, поданной 27 мая 2015 года, и предварительной заявкой на выдачу патента США №62/244,543, поданной 21 октября 2015 года, содержание которых полностью включено в настоящую заявку посредством ссылки.
Предшествующий уровень техники настоящего изобретения
Возможность определения местоположения и формирования подвижных объектов в режиме реального времени, в том числе железнодорожных вагонов, локомотивов и железнодорожных составов, приобретает все большее значение для владельцев железных дорог и операторов-перевозчиков. С эксплуатационной точки зрения операторам-перевозчикам важно определить, находится ли железнодорожный вагон за пределами или внутри депо, стоит он или движется, а также установить, является ли вагон частью железнодорожного состава или нет или не соединен ли он с другими вагонами.
Осведомленность о текущем состоянии железнодорожных вагонов позволяет оператору-перевозчику определить, используются ли железнодорожные вагоны в каждый данный момент времени или простаивают, что облегчает управление операциями в депо.
В существующей отраслевой практике управление железнодорожными составами и депо в рамках технической эксплуатации железных дорог основывается на считывании пассивных меток радиочастотной идентификации (RFID), закрепленных на каждом железнодорожном вагоне, в фиксированных точках железнодорожной сети. И хотя этот способ предоставляет операторам железных дорог перечень входящих/выходящих подвижных объектов, он лишен преимуществ динамической беспроводной сети, способной передавать оперативную информацию, например, данные о местоположении, состоянии и/или рабочих характеристиках, которые выходят за пределы рабочего диапазона RFID-ридера. Кроме того, информация, обычно закодированная в RFID-метке, является статической, и поэтому RFID-метка не может предоставить данные о текущем состоянии железнодорожного вагона. Помимо этого, в существующих системах не предусмотрен механизм валидации сформированного железнодорожного состава до его выхода из депо. Возможны ошибки в процессе формирования железнодорожного состава, в результате которых могут быть пропущены, добавлены ненадлежащие или лишние железнодорожные вагоны. Существует также угроза безопасности, связанная с вмешательством оператора для визуального подтверждения правильности формирования железнодорожного состава до его выхода из депо.
Следовательно, необходимо предложить такую систему управления железнодорожными составами в депо, которая облегчила бы управление формированием и валидацию сформированных железнодорожных составов. Эта система призвана устранить ошибки и снизить угрозу безопасности людей, вручную управляющих системами известного уровня техники. Кроме того, автоматизирование процесса повышает эффективность управления депо, что снижает расходы.
С учетом жестких условий эксплуатации и суровых климатических условий, в которых работают железнодорожные составы, любая система непрерывного контроля должна характеризоваться надежностью, устойчивостью к воздействию внешних факторов и способностью работать в течение длительного периода времени с минимальным вмешательством для проведения технического обслуживания или вообще без такового. Поскольку только в Северной Америке эксплуатируется свыше полутора миллионов грузовых железнодорожных вагонов, не считая множества миллионов таких вагонов по всему свету, крайне востребована система непрерывного контроля за всеми вагонами, как используемыми, так и стоящими в депо; при этом указанная система должна обладать возможностью наращивания с тем, чтобы она могла справляться с огромным количеством потенциально используемых устройств.
Железнодорожные системы связи с использованием датчиков раскрыты в патенте США №7,688,218, выпущенного 30 марта 2010 года; в патенте США №9,026,281, выпущенного 05 мая 2015 года; в публикации патента США №2013/0342362 от 26 декабря 2013 года; в международной заявке согласно РСТ № PCT/US 2014/067739, поданной 26 ноября 2014 года; и в международной заявке согласно РСТ № PCT/US 2014/072380, поданной 24 декабря 2014 года; при этом содержание указанных документов полностью включено в настоящую заявку посредством ссылки.
Краткое раскрытие настоящего изобретения
Цель настоящего изобретения заключается в том, чтобы предложить комплексную систему, обеспечивающую сбор данных и анализ этих данных с целью выполнения одной или нескольких следующих функций:
- определения наличия железнодорожных вагонов в депо;
- определения местоположения и ориентации железнодорожных вагонов в депо;
- последовательного мониторинга формирования железнодорожных составов;
- определения порядка следования и ориентации вагонов в железнодорожном составе;
- валидации порядка следования вагонов в железнодорожном составе и ориентации вагонов в железнодорожном составе;
- выдачи соответствующих предупредительных сигналов при нарушении заданного порядка следования вагонов в железнодорожном составе и, соответственно, обеспечение своевременного вмешательства человека или автоматизированных систем до того, как произойдет эксплуатационный отказ;
- предоставления возможности анализа с целью определения серьезности и приоритета событий и предупреждений на разных уровнях; и
- определения рабочего состояния железнодорожных вагонов в депо (загружен, разгружен, на стояночном тормозе и пр.).
Согласно одному из предпочтительных вариантов своего осуществления и в привязке к фиг. 1 настоящее изобретение относится к системе и способу формирования железнодорожного состава и управления им и включает в себя следующие элементы:
Ячеистую поездную сетевую систему 107, использующую беспроводную ячеистую сеть для обеспечения двусторонней связи между грузовыми вагонами 103(a) или 103(b) в железнодорожном составе 109 и хостом или пунктом управления.
Приводной беспроводной шлюз (ПБШ) 102 для управления ячеистой поездной сетью 107 и передачи данных о событиях с отдельных железнодорожных вагонов 103(a) или 103(b) машинисту локомотива или в другие системы управления перевозками.
Приводной беспроводной шлюз 102, выполненный с возможностью приема данных о событиях с множества датчиков отдельных железнодорожных вагонов и получения логического вывода о порядке следования вагонов в железнодорожном составе 109.
Приводной беспроводной шлюз 102, выполненный с возможностью приема данных от внешнего центра управления или системы сбора и обработки данных с указанием на те грузовые вагоны 103(a) или 103(b), которые должны входить в железнодорожный состав 109, что позволяет включить в железнодорожный состав только указанные вагоны 103(a) или 103(b) и сообщить об отсутствующих в составе вагонах 103(a) или 103(b).
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью выполнения функций беспроводного блока в ячеистой поездной сети 107 и с возможностью передачи сообщений на хост или пункт управления.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью использования встроенных датчиков и/или управления беспроводным сенсорным узлом 104 на грузовом железнодорожном вагоне 103 для генерирования сообщений, которые должны посылаться на хост, расположенный на локомотиве, или в пункт управления.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью поддержки датчика глобальной навигационной спутниковой системы (ГНСС) для определения местоположения, ориентации или скорости грузового железнодорожного вагона 103.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью использования компаса.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью использования датчика движения.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью использования одного или более акселерометра для регистрации ударных воздействий.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью использования одного или более акселерометра для регистрации движения.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью поддержки одной или множества геозон.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью индикации наличия RFID-ридера.
Блок управления связью 101 на каждом железнодорожном вагоне 103, выполненный с возможностью определения наличия ячеистой сети и мощности сигнала.
Беспроводной сенсорный узел 104, содержащий датчик температуры и акселерометр.
Беспроводной сенсорный узел (БСУ), содержащий датчик движения.
Беспроводной сенсорный узел 104, содержащий другие датчики.
Управляемое депо или неуправляемое место нахождения с одним или более приводным беспроводным шлюзом 102.
Железнодорожный состав 109, определяемый как группа соединенных между собой железнодорожных вагонов 103 и локомотивов 108, образующий полный железнодорожный состав.
Ячеистую поездную сеть 107, используемую для формирования железнодорожного состава и управления им, которая может быть также использована для передачи событий и аварийных сигналов, как во время формирования железнодорожного состава 109 (в центр управления), так и после составления железнодорожного состава 109 (в центр управления или на локомотив 108).
Краткое описание фигур
На фиг. 1 показана схема, иллюстрирующая систему управления железнодорожным составом и сопутствующие аппаратные компоненты.
На фиг. 2 показана блок-схема, иллюстрирующая способ определения местоположения и ориентации железнодорожного вагона в депо относительно рельс.
На фиг. 3 показана блок-схема, иллюстрирующая способ определения того, находится ли железнодорожный вагон в депо.
На фиг. 4 показана схема, иллюстрирующая сцепление между собой железнодорожных вагонов для формирования железнодорожного состава.
На фиг. 5 показана схема, иллюстрирующая, как данные с беспроводного сенсорного узла, блока управления связью и приводного беспроводного шлюза поступают в центр управления.
На фиг. 6 показана блок-схема, иллюстрирующая передачу сообщений, исходя из их приоритета.
На фиг. 7 показана схема, иллюстрирующая депо с известной ориентацией, в частности, вытянутое с юго-запада в направлении северо-востока, с увеличенным изображением железнодорожного вагона, где показано, как можно определить конец В железнодорожного вагона с установленным на нем блоком БУС, исходя из направления БУС относительно севера.
На фиг. 8 представлена схема, показывающая, как определить, находятся ли два железнодорожных вагона на одном и том же рельсовом пути или нет.
На фиг. 9 показана схема, иллюстрирующая, как отслеживаемые железнодорожные вагоны без ПБШ (либо в управляемом депо, либо как часть управляемого железнодорожного состава) могут распознаваться проходящим локомотивом, на котором установлен приводной беспроводной шлюз.
На фиг. 10 показаны примеры кривых распределения вероятностей для двух иллюстративных датчиков.
На фиг. 11 приведен конкретный пример использования кривых распределения вероятностей для определения вероятности сцепления двух или более железнодорожных вагонов.
На фиг. 12 приведены примеры использования статистических данных вместо вероятностей для определения вероятности сцепления двух или более железнодорожных вагонов.
На фиг. 13 показана блок-схема, иллюстрирующая процесс определения того, имело ли место событие сцепления.
Определения
Железнодорожный состав, обозначенный на чертежах позицией 109, определяется как группа соединенных между собой железнодорожных вагонов и локомотивов.
Сцепка. пример которой приведен на фиг. 4, определяется как два или более соединенных между собой железнодорожных вагона.
Вычислительное устройство определяется как любое устройство, выполненное с возможностью обработки данных и исполнения программ с целью проведения каких-либо вычислений или обеспечения иных функциональных возможностей. Вычислительное устройство также должно обладать возможностью хранения данных и передачи информации по сети для выполнения функций, требуемых согласно настоящему изобретению. К вычислительным устройствам относятся, помимо прочего, сервер, ПК (персональный компьютер) и приводные беспроводные шлюзы 102, описанные в настоящем документе.
Управляющее устройство определяется как любое устройство, выполненное с возможностью соединения между собой блоков в ячеистой сети в соответствии с синхронизированным во времени графиком и соблюдения этого графика соединений таким образом, чтобы между всеми блоками в сети и с управляющим устройством была обеспечена надежная двусторонняя связь. Управляющее устройство может также обеспечивать соединение пользователя с другим сетевым узлом по внешней связи. К управляющим устройствам относятся, помимо прочего, приводные беспроводные шлюзы 102 и блоки управления связью 101, описанные в настоящем документе.
Узел определяется как любое устройство, выполненное с возможностью обеспечения двусторонней беспроводной связи с другим устройством с целью передачи и приема данных. К узлам относятся, помимо прочего, блоки 101 управления связью и беспроводные сенсорные узлы 104, описанные в настоящем документе.
Датчик определяется как любое устройство, выявляющее или измеряющее какое-либо физическое свойство и регистрирующее полученный результат или передающее результирующий сигнал. Один или более датчик может быть встроен в приводной беспроводной шлюз 102, блок 101 управления связью и беспроводной сенсорный узел 104, которые описаны в настоящем документе.
Беспроводной сенсорный узел (БСУ), обозначенный на чертежах позицией 104, обычно устанавливается на железнодорожном вагоне 103(a) или 103(b), и в предпочтительном варианте помещается в отдельный изолированный защитный корпус; при этом он может содержать один или несколько датчиков; источник питания; схемы, которые позволяют считывать данные с датчика/датчиков и преобразовывать их показания в цифровую форму; и совокупность схем связи, которые позволяют БСУ передавать показания датчика/датчиков на внешний приемник беспроводным способом. Беспроводные сенсорные узлы используются для считывания контролируемого параметра (например, температуры подшипников или окружающего воздуха) или состояния (например, положения люка или стояночного тормоза). БСУ может также обладать интеллектуальными возможностями, реализованными в виде программ, которые выполняются на встроенном микропроцессоре для анализа полученных данных и определения того, следует ли эти данные передать немедленно, сохранить их для последующей передачи или свести в аварийный сигнал. Модули БСУ обычно являются частью беспроводной ячеистой сети, управляемой или блоком управления связью, или приводным беспроводным шлюзом.
Блок управления связью (БУС), обозначенный на чертежах позицией 101, обычно устанавливается на железнодорожном вагоне 103 и необязательно выполняет функцию устройства управления беспроводной ячеистой вагонной сетью 105, которая покрывает железнодорожный вагон 103. В состав аппаратного обеспечения БУС 101 предпочтительно входят следующие элементы: процессор; источник питания (например, аккумуляторная батарея); приемник глобальной системы позиционирования (GPS); устройство Wi-F и/или модуль сотовой системы радиосвязи; система беспроводной телекоммуникационной связи для обслуживания ячеистой сети; и необязательно один или более датчик, такой как, помимо прочего, акселерометр или датчик температуры. Блок БУС поддерживает один или несколько БСУ в конфигурации ячеистой сети с использованием открытых протоколов связи, например, стандарта радиосвязи IEEE 802.15.4 диапазона 2,4 ГГц. Кроме того, блок БУС также является или составной частью беспроводной ячеистой поездной сети, состоящей из блоков БУС всех подключенных железнодорожных вагонов в пределах состава, которая управляется управляющим устройством, таким как приводной беспроводной шлюз (ПБШ), обычно установленным на локомотиве; или составной частью беспроводной ячеистой сети депо, управляемой одним или несколькими управляющими устройствами, предпочтительно приводными беспроводными шлюзами, распределенными по всему депо; или же он функционирует независимо от беспроводной ячеистой сети. Таким образом, блок БУС выполняет, по меньшей мере, четыре функции: 1) поддерживает встроенные в БУС датчики, такие как акселерометр, для отслеживания конкретных параметров железнодорожного вагона, таких как местоположение, скорость, ускорение и прочие; 2) поддерживает двустороннюю связь с хостом на приводном объекте или пунктом управления, например, с локомотивом и/или центром контроля и управления подвижным железнодорожным составом; 3) обобщает данные со встроенных датчиков и/или любого количества БСУ в беспроводной ячеистой вагонной сети и применяет логику в отношении собранных данных с целью генерирования и выдачи предупредительных сигналов на хост на приводном объекте, таком как локомотив, или в удаленный центр управления; и 4) управляет слаботочной беспроводной ячеистой сетью, покрывающей железнодорожный вагон.
Блок БУС выполнен с возможностью приема данных и/или аварийных сигналов с одного или более модуля БСУ или непосредственного генерирования данных и/или аварийных сигналов, а также с возможностью получения логических выводов по этим данным или аварийным сигналам в отношении рабочих характеристик железнодорожного вагона 103 и передачи данных и аварийной информации на удаленный приемник. В предпочтительном варианте блок БУС представляет собой единый блок, служащий каналом связи с другими пунктами, такими как подвижная базовая станция (например, локомотив 108), наземная базовая станция и прочие; при этом он выполнен с возможностью обработки полученных данных. Блок БУС также сообщается с модулями БСУ (при их наличии) в локальной беспроводной ячеистой поездной сети, управляет ими и контролирует их работу. В предпочтительном варианте установка БСУ на каждом железнодорожном вагоне логически обоснована, поскольку это пригодится при определении порядка следования и ориентации вагонов в железнодорожном составе, что будет описано ниже.
Приводной беспроводной шлюз (ПБШ), обозначенный на чертежах позицией 102, предпочтительно установлен или на локомотиве, или развернут как часть беспроводной ячеистой сети депо. Обычно он включает в себя следующие элементы: процессор; приемник ГНСС (Глобальная навигационная спутниковая система); спутниковую и/или сотовую систему радиосвязи; порт Ethernet; и диспетчер сети с высокой пропускной способностью. Шлюз ПБШ запитывается с локомотива, если он установлен на нем; или же он может получать питание из другого источника. Шлюз ПБШ управляет ячеистой сетью, покрывающей железнодорожный состав (беспроводной ячеистой поездной сетью, определение которой дано ниже) и включающей в себя множество блоков БУС каждого из вагонов в железнодорожном составе; или является частью беспроводной ячеистой сети, покрывающей депо (беспроводной ячеистой сетью депо, определение которой дано ниже), которая включает в себя другие ПБШ и блоки БУС отдельных железнодорожных вагонов, в настоящее время отцепленных от железнодорожного состава. Шлюзы ПБШ могут напрямую сообщаться с модулями БСУ и управлять ими, не требуя наличия БУС.Шлюз ПБШ, если он установлен на подвижном объекте с силовым приводом, таком как локомотив, может запитываться из этого объекта с силовым приводом; или же он может получать питание из другого источника, например, с гелиоустановки или аккумуляторной батареи большой емкости.
Шлюз ПБШ собирает данные и делает логические выводы о рабочих характеристиках железнодорожного состава в отличие от блоков БУС, которые делают логические выводы о рабочих характеристиках отдельных железнодорожных вагонов.
«Молчащий» железнодорожный вагон представляет собой железнодорожный вагон, в котором предусмотрен блок БУС, но который не связан или не соединен с беспроводной ячеистой поездной сетью или беспроводной ячеистой сетью депо согласно приведенным ниже определениям.
Беспроводная ячеистая вагонная сеть, обозначенная на чертежах позицией 105, состоит из установленного на железнодорожном вагоне 103 блока БУС, который является частью ячеистой сети и управляет указанной сетью, состоящей из множества БСУ, каждый из которых в предпочтительном варианте установлен на том же вагоне 103.
Беспроводная ячеистая поездная сеть, обозначенная на чертежах позицией 107, состоит из шлюза ПБШ 102, обычно устанавливаемого на локомотиве 108 (но который может устанавливаться на любом подвижном объекте железнодорожного состава), который является частью ячеистой сети и управляет указанной сетью, состоящей из множества блоков БУС, каждый из которых установлен на отдельном железнодорожном вагоне; при этом локомотив и множество вагонов образуют железнодорожный состав.
Беспроводная ячеистая сеть депо, обозначенная на чертежах позицией 117, включает в себя один или несколько наземных ПБШ, установленных в стратегических точках депо. Блоки ПБШ (114) образуют ячеистую сеть, которая включает в себя один или более мобильный блок ПБШ, каждый из которых установлен на приводном объекте, таком как локомотив, и может необязательно содержать один или более БСУ, установленный на железнодорожных вагонах. При определенных обстоятельствах отдельные БСУ, установленные на железнодорожных вагонах, могут напрямую соединяться с ячеистой сетью депо (или ячеистой поездной сетью), обходя БУС, установленный на вагоне, путем установления прямой связи с блоками ПБШ, расположенными в депо. Локомотивы и железнодорожные вагоны в ячеистой сети депо не соотносятся с железнодорожным составом, а вместо блоков ПБШ, БУС и необязательно БСУ, установленных на железнодорожных вагонах, используются соответствующие блоки ячеистой сети депо.
Являясь основой международного стандарта IEC 62591 для беспроводных сетей, а также стандарта ISA100.11 от Международного общества автоматизации, архитектура беспроводной ячеистой поездной сети и сети депо разработана с учетом требований указанных стандартов.
Управляемое депо определяется как депо, покрытое ячеистой сетью депо.
Нижеследующее описание раскрывает систему применительно к железнодорожному вагону, однако любому специалисту в данной области техники понятно, что эти же способы применимы к любому рельсовому транспортному средству или подвижному объекту. Также следует отметить, что определения, приведенные выше, не являются исключительными в том аспекте, что определяемые элементы могут характеризоваться наличием дополнительных элементов или признаков, не включенных в данное определение. Кроме того, хотя нижеследующее описание характеризует железнодорожный вагон с двумя тележками, оно применимо к вагонам любой конфигурации, снабженным большим или меньшим числом тележек или осей.
Подробное раскрытие настоящего изобретения
Одна из целей настоящего изобретения заключается в том, чтобы предложить систему управления железнодорожными составами, предусматривающую покрытие депо ячеистой сетью и содержащую один или несколько приводных беспроводных шлюзов, установленных в депо, которые выступают в качестве пунктов передачи информации и агрегаторов данных, генерируемых и передаваемых ячеистыми сетями всех железнодорожных вагонов, находящихся в депо. Кроме того, приводные беспроводные шлюзы депо управляют железнодорожными составами и проводят анализ данных с множества отслеживаемых железнодорожных вагонов и систем. Если железнодорожный вагон находится вне пределов депо, такая же передача данных и анализ могут выполняться с использованием приводного беспроводного шлюза, установленного на локомотиве или ином подвижном объекте.
Настоящее изобретение работает в среде управляемого депо, имеющего типологию, которая проиллюстрирована на фиг. 1. Железнодорожный вагон 103 (обозначенный на фиг. 1 позициями 103(a) и 103(c)) обычно снабжен множеством блоков БСУ 104, установленных в разных точках железнодорожного вагона 103. Расположение отдельных БСУ 104 зависит от отслеживаемого эксплуатационного параметра/параметров железнодорожного вагона 103. Блок БУС 101 устанавливается на железнодорожном вагоне 103 и образует ячеистую вагонную сеть 105, управляемую блоком БУС 101 и снабженную модулями БСУ 104 в качестве узлов сети. В предпочтительном варианте блоки БУС 101 располагаются и ориентируются последовательным образом на каждом железнодорожном вагоне 103. Также предпочтительно, чтобы блоки БУС 101 были обращены в сторону одного конца железнодорожного вагона 103 с тем, чтобы они были полезны при определении ориентации вагона в пределах железнодорожного состава и в любом месте в пределах депо. В необязательном варианте железнодорожный вагон 103 может иметь только один БУС 101 и ни одного БСУ 104, как на вагоне 103(b), показанном на фиг. 1; и в этом случае с этим железнодорожным вагоном не будет соотноситься никакая ячеистая вагонная сеть.
Локомотив 108 снабжен блоком ПБШ 102. Блок ПБШ 102 также контролирует беспроводную ячеистую поездную сеть 107, которая управляется блоком ПБШ 102 и снабжена блоками БУС 101, установленными на каждом вагоне железнодорожного состава и выполняющими функции узлов.
Железнодорожный вагон 103(d), не снабженный блоком 101 управления связью или блоками БСУ 104, считается неуправляемым вагоном и не охватывается ячеистой поездной сетью 107.
Настоящее изобретение также относится к способу отслеживания вагонов в депо; при этом местонахождение и ориентация железнодорожного вагона в депо устанавливается способом, проиллюстрированном на фиг. 2; наличие железнодорожного вагона 103(a) или 103(b) в депо определяется способом, проиллюстрированном на фиг. 3; а формирование железнодорожного состава осуществляется так, как это показано на фиг. 4.
Место вагона в железнодорожном составе, ориентацию и/или местоположение железнодорожных вагонов в депо можно установит несколькими способами, описанными ниже. Ориентация вагона в железнодорожном составе является критически важным фактором при формировании железнодорожного состава. Как известно, в описываемой отрасли концы железнодорожного вагона обозначаются литерами А и В. Для определения ориентации железнодорожного вагона могут быть использованы показания магнитометра или электронного компаса и акселерометра. Кроме этого, ориентация может определяться по местонахождению компонентов системы на железнодорожном вагоне.
На фиг. 2 показана блок-схема, иллюстрирующая способ определения местоположения и ориентации железнодорожного вагона в депо. Этот способ предусматривает следующие допущения:
- Блоки БУС установлены на каждом железнодорожном вагоне в известных точках и с известной ориентацией.
- В депо может быть предусмотрен один или множество блоков БУС.
- Границы и ориентация депо относительно северного магнитного полюса известны по данным за прошлый период и геозонам.
- Временные метки соотносятся со всеми событиями, фиксируемыми датчиками.
- Может быть использована ориентация железнодорожного вагона в известном депо, а не положение устройства с компасом, установленного на железнодорожном вагоне.
Реализация способа начинается на стадии 150 с принятия допущения о том, что железнодорожный вагон находится в депо. На стадиях 151, 152 и 153 определяется, движется ли железнодорожный вагон или нет, что осуществляется, соответственно, с помощью акселерометра, датчика движения и/или ГНСС.
Если на стадии 154 принятия решения было обнаружено движение, осуществляется переход к стадии 157, на которой рассчитывается уровень доверительной вероятности; и если на стадии 156 принятия решения рассчитанный уровень доверительной вероятности превышает требуемое пороговое значение, движение подтверждается. Уровень доверительной вероятности, который рассчитывается на стадии 157, представляет собой вероятность того, что железнодорожный вагон действительно движется. Если на стадии 156 принятия решения пороговое значение не достигнуто или не превышено, то осуществляется возврат к началу реализации способа, где различные датчики проверяют наличие движения. Если на стадии 158 устанавливается, что железнодорожный вагон движется, то на стадиях 159 и 160 периодически снимаются данные о направлении по компасу и местоположении по ГНСС. Также периодически снимаются показания акселерометра и датчика движения. На стадии 163 принятия решения устанавливается, может ли быть определено направление конца В железнодорожного вагона. Если да, то на стадии 166 рассчитывается уровень доверительной вероятности, а на стадии 167 принятия решения определяется, превышает ли уровень доверительной вероятности требуемое пороговое значение. Если пороговое значение превышено, то посылается сообщение с указанием направления, в сторону которого обращен конец В железнодорожного вагона, включающее в себя уровень доверительной вероятности. Если на стадии 167 принятия решения уровень доверительной вероятности не превышает пороговое значение, то осуществляется возврат к началу реализации способа, где на стадиях 151, 152 и 153 проверяется наличие движения. На стадии 168 принятия решения пользователь необязательно может переконфигурировать систему на передачу сообщения вне зависимости от уровня доверительной вероятности, и в этом случае сообщение будет передано на стадии 169.
Если на стадии 154 принятия решения устанавливается, что нет никакого движения, то на стадии 155 железнодорожный вагон определяется как неподвижный, и на стадии 161 снимаются данные о направлении по компасу и местоположении по ГНСС. На стадии 162 принятия решения определяется, известна ли ориентация железнодорожного вагона. Если она неизвестна, то осуществляется переход к стадии 165, на которой снимаются данные о направлении по компасу и местоположении по ГНСС, по меньшей мере, трех железнодорожных вагонов состава. На стадии 164 направление по компасу и местоположение по ГНСС рассматриваемого вагона сравниваются с показаниями, полученными на стадии 165, по меньшей мере, по трем другим железнодорожным вагонам. На стадии 163 принятия решения устанавливается, можно ли определить направление конца В железнодорожного вагона; и если нет, то способ продолжает выполняться так, как это описано выше. Если на стадии 162 принятия решения устанавливается, что ориентация железнодорожного вагона неизвестна, то осуществляется переход непосредственно к стадии 163, после чего способ продолжает выполняться так, как это описано выше.
На фиг. 3 показана блок-схема, иллюстрирующая способ определения того, находится ли железнодорожный вагон в депо или нет. В этом случае указанный способ предусматривает допущение о том, что депо представляет собой управляемое депо. Реализация способа начинается на стадии 201 с железнодорожного вагона. На стадии 202 принятия решения устанавливается, является ли железнодорожный вагон частью беспроводной ячеистой сети 117 депо. Если да, то осуществляется переход к стадии 205 принятия решения, на которой устанавливается, соответствует ли местоположение железнодорожного вагона по данным ГНСС нахождению вагона в депо. Если да, то на стадии 206 рассчитывается уровень доверительной вероятности того, что этот железнодорожный вагон действительно находится в депо.
На стадии 208 принятия решения устанавливается, не превышает ли уровень достоверной вероятности требуемое пороговое значение для подтверждения того, что этот железнодорожный вагон находится в депо. Если пороговое значение превышено, то осуществляется переход к стадии 209, на которой подтверждается, что железнодорожный вагон находится в депо. Если уровень достоверной вероятности не превышен, то осуществляется возврат к стадии 202 принятия решения.
Если на стадии 205 принятия решения местоположение железнодорожного вагона по данным ГНСС не соответствует нахождению вагона в депо, то осуществляется переход к стадии 207, и делается логический вывод о том, что железнодорожный вагон не находится в депо.
Если железнодорожный вагон не является частью беспроводной ячеистой сети 117 депо, то осуществляется переход к стадии 204 принятия решения, на которой устанавливается, прошел ли железнодорожный вагон AEI-сканер (автоматической идентификации оборудования). Если железнодорожный вагон прошел AEI-сканер, то осуществляется переход к стадии 205 принятия решения, после чего выполнение способа продолжается так, как это описано выше. Если на стадии 204 принятия решения устанавливается, что железнодорожный вагон не прошел AEI-сканер, то на стадии 203 принятия решения устанавливается, находится ли железнодорожный вагон в пределах геозоны, задающей границы депо. Если устанавливается, что железнодорожный вагон находится в пределах заданной геозоны депо, то осуществляется переход к стадии 205 принятия решения, после чего выполнение способа продолжается так, как это описано выше. Если на стадии 203 принятия решения устанавливается, что железнодорожный вагон находится за пределами заданной геозоны депо, то на стадии 207 подтверждается, что этот железнодорожный вагон не находится в депо.
Совокупность сцепок образует железнодорожный состав, как это показано на фиг. 4. Железнодорожный состав формируется из сцепок, которые добавляются по одной за один раз. Сцепление железнодорожных вагонов является крайне важным этапом процесса и может осуществляться одним или несколькими способами, которые могут быть использованы обособленно или в сочетании для достижения уровня вероятности, подтверждающего тот факт, что произошло сцепление двух или более железнодорожных вагонов или двух или более сцепок. Уровень доверительной вероятности соответствующего порядка следования вагонов в железнодорожном составе повышается, если используется более одного способа. Показания датчиков и результаты процесса соотносятся с подвижным объектов, компонентом подвижного объекта, событием и временем. Информация сохраняется для анализа, как в режиме реального времени, так и по наборам данных за прошлый период.
На фиг. 13 показана блок-схема, иллюстрирующая процесс верификации того, что были сцеплены два или более железнодорожных вагона или две или более сцепки. Процесс начинается со стадии 1301, и на стадии 1302 принятия решения устанавливается, произошло ли событие, для которого существует кривая распределения вероятностей (т.е. событие, которое может иметь значение при определении сцепления). Если нет, то осуществляется возврат к стадии 1302 принятия решения. Если получено событие, представляющее интерес, то величина вероятности этого события может быть считана с соответствующей кривой распределения вероятностей на стадии 1303. На стадии 1304 принятия решения устанавливается, достаточно ли произошло событий, чтобы можно было определить сцепление. Если нет, то осуществляется возврат к стадии 1302 принятия решения. Если произошло достаточно событий, то на стадии 1306 вероятности считываются с кривой распределения вероятностей для каждого события и перемножаются друг на друга для получения общей вероятности. На стадии 1305 принятия решения устанавливается, превышает ли общая вероятность заданное пороговое значение, необходимое для подтверждения факта сцепления. Если нет, то осуществляется возврат к стадии 1302 принятия решения. Если да, то на стадии 1308 событие сцепления подтверждается.
На фиг. 4 проиллюстрировано формирование железнодорожного состава, составляемого из сцепок железнодорожных вагонов. Как показано на фиг. 4(a), железнодорожный вагон В стыкуется с железнодорожным вагоном А, в результате чего образуется сцепка 401. Подобным же образом железнодорожный вагон D стыкуется с железнодорожным вагоном С с образованием сцепки 402. Как показано на фиг. 4(b), железнодорожный вагон С стыкуется с железнодорожным вагоном В для образования более крупной сцепки 403, проиллюстрированной на фиг. 4(c). Как показано на фиг. 4(d), с железнодорожным вагоном D стыкуется один железнодорожным вагон Е, образуя сцепку 404, состоящую их железнодорожных вагонов А-Е, показанных на фиг. 4(e).
Блоки БУС 101 в первую очередь обеспечивают потоки данных в восходящем направлении для определения наличия железнодорожных вагонов в депо, ориентации и местоположения железнодорожных вагонов в депо (фиг. 2), соединения или сцепления железнодорожных вагонов по мере их готовности в процессе формирования железнодорожного состава (фиг. 4), порядка следования вагонов в железнодорожном составе, валидации вагонов в железнодорожном составе и направления движения железнодорожного состава. Кроме того, блоки БУС могут быть необязательно снабжены средствами отслеживания показаний различных датчиков (как встроенных в БУС, так и установленных в БСУ, которые поддерживают связь с БУС, а также закрепленных непосредственно на железнодорожном вагоне и определяющих динамические характеристики и состояние вагона и различных его узлов на основе анализа полученных данных). Датчики собирают, сохраняют, анализируют и обрабатывают данные, которые затем передаются в блок БУС для последующей передачи в блок ПБШ, где инженер, пункт управления или автоматизированная система может принимать решения на основе этих данных; для передачи в центр дистанционного управления железнодорожными перевозками; или для обработки и анализа с целью генерирования аварийных сигналов, событий или отчетов.
Блок БУС выполнен с возможностью сбора данных с каждого встроенного датчика и модулей БСУ и выполнения высокоуровневого анализа данных путем применения эвристического подхода и статистических моделей к данным, событиям и аварийным сигналам, полученным с множества БСУ, с целью определения местоположения, скорости, направления, состояния и других параметров железнодорожного вагона. В ходе такого анализа данных для определения возможности сцепления железнодорожных вагонов может быть применен эвристический подход, основанный на статистических моделях и эмпирических данных. Блок БУС также выполнен с возможностью передачи данных и результатов любого анализа в другую систему, находящуюся на удалении от железнодорожного вагона, по одному или более протоколу связи.
Блок ПБШ может располагаться, например, на локомотиве, в депо или за пределами железнодорожного состава в центре дистанционного управления железнодорожными перевозками. Блок ПБШ может быть также выполнен с возможностью выполнения высокоуровневого анализа состояния всего железнодорожного состава путем применения эвристического подхода и статистических моделей к данным, событиям и аварийным сигналам, полученным с множества блоков БУС, установленных на разных вагонах железнодорожного состава. Анализ собранных данных может выполняться любым из множества разных обработчиков событий, распределенных по различным компонентам системы согласно настоящему изобретению, включая сенсорные модули, блоки БУС, поездные или наземные блоки ПБШ или иные наземные станции. Обработчик событий используется для выявления изменений состояния и определения действий, которые необходимо выполнить на устройстве, исходя из множества входных данных, получаемых системой изнутри или извне. Логика, используемая для определения конечного результата, основана на наборе правил, которые могут задаваться и обновляться дистанционно.
На фиг. 5 проиллюстрирован способ управления данными по мере их поступления от датчиков в модули БСУ 104 или БУС 101, а затем - в устройства более высокого уровня; при этом приняты следующие допущения:
- Способ анализа данных реализуется на каждом уровне обработчиками событий.
- Логический анализ перенесен на самый нижний уровень для обеспечения более эффективного управления полосой пропускания, расходом электроэнергии и временем задержки.
- При необходимости события передаются только в восходящем направлении.
- Фильтрация и анализ данных и событий выполняются на каждом уровне.
- Блоки БУС, ПБШ и серверы (в центре управления) могут использовать сбор и обобщение данных с различных датчиков для более эффективного определения состояния более крупных систем, которые совместно используют события с этих разных источников данных.
Низший уровень 502 обработки данных предусматривает использование необязательного модуля БСУ 104, установленного на каждом железнодорожном вагоне 103(a) или 103(b); и датчиков, которые могут быть встроены в модули БУС 101 на каждом железнодорожном вагоне. Данные, собираемые на низшем уровне 502, анализируются встроенными процессорами, установленными в каждом модуле БСУ 104 или блоке БУС 101, чтобы определить, какие данные могут быть исключены, а какие данные должны быть переданы на следующий более высокий уровень 504 обработки. Следующий более высокий уровень 504 обработки предусматривает использование блока БУС 101, установленного на каждом железнодорожном вагоне. Блок БУС 101, установленный на каждом железнодорожном вагоне, выполнен с возможностью принятия решений, для которых могут потребоваться данные с множества модулей БСУ 104 на железнодорожном вагоне. По результатам этого анализа блок БУС 101 может также определить, какие данные должны быть переданы на высший уровень 506 обработки. Высший уровень 506 обработки данных предусматривает использование блока ПБШ 102, расположенного на локомотиве; наземных ПБШ 116, установленных в депо; и центра управления. Блок ПБШ 102, установленный на локомотиве, выполнен с возможностью принятия решений, которые требуют данных с множества блоков БУС 101 или множества модулей БСУ 194, установленных на каждом железнодорожном вагоне (т.е. данных о состоянии всего железнодорожного состава). Если железнодорожный вагон 103(a) или 103(b) находится в границах депо, то сообщения с блока БУС 101 могут передаваться в блок ПБШ 116, расположенный в депо. Это может быть наземный блок ПБШ 116. На уровне 506 блок БУС 101 каждого железнодорожного вагона может также посылать сообщения непосредственно в центр управления. На высшем уровне обработки данных информация может использоваться совместно блоком ПБШ 102 на локомотиве, блоком ПБШ 116 в депо и центром управления. В прямоугольнике 506 блок-схемы отображен высший уровень обработки данных, а решения на этом уровне обычно отражают информацию о состоянии всего железнодорожного состава или депо.
Различные уровни обработки данных объединяются для создания распределенного механизма логического вывода, в котором каждый уровень обработки данных может делать логические выводы, которые требуют данных с этого уровня, и/или данных, которые были получены на более низких уровнях обработки и переданы на более высокие уровни обработки. К примеру, верификация события сцепления требует данных, по меньшей мере, с двух железнодорожных вагонов (например, данных о стыковке и местоположении каждого сцепляемого вагона). Таким образом, событие сцепления должно быть сгенерировано на высшем уровне обработки после получения данных с каждого железнодорожного вагона. В этом случае высший уровень обработки данных отображен на фиг. 5 прямоугольником 506, который представляет собой узел в беспроводной ячеистой сети депо.
На фиг. 6 показана блок-схема, иллюстрирующая способ передачи сообщений, исходя из уровня их приоритета, с низшего уровня 502 обработки данных на более высокие уровни 504 и 506 обработки данных, показанные на фиг. 5. Реализация способа начинается со стадии 501, на которой создается сообщение о событии. На стадии 502 этому сообщению присваивается уровень приоритета, исходя из конфигурации пользователя; и на стадии 503 принятия решения устанавливается доступность широкой полосы пропускания для передачи сообщения. При наличии широкой полосы пропускания осуществляется переход к стадии 510, на которой выполняется передача сообщения. Если широкая полоса пропускания недоступна, на стадии 505 принятия решения устанавливается, имеет ли сообщение высокий приоритетный статус. Если сообщение имеет высокий приоритет, осуществляется переход к стадии 506, на которой устанавливается, доступна ли узкая полоса пропускания. Если доступна узкая полоса пропускания, то на стадии 510 выполняется передача сообщения. Если узкая полоса пропускания недоступна, или если сообщение не имеет высокого приоритетного статуса, осуществляется переход к стадии 507 принятия решения, на которой устанавливается, задает ли конфигурация пользователя количество попыток повторной передачи в течение определенного периода времени. Если да, то осуществляется переход к стадии 504, на которой устанавливается, превышено ли заданное количество попыток; и если нет, то осуществляется переход к стадии 503 принятия решения, после чего способ продолжает выполняться так, как это описано выше. Если количество попыток повторной передачи превышено, или если пользователь не задал опцию повторной передачи, то сообщение сохраняется в течение заданного периода времени до того, как на стадии 508 будет выполнена проверка на наличие полосы пропускания. На стадии 509 принятия решения устанавливается, не истекло ли время проверки на наличие полосы пропускания; и если да, то осуществляется возврат к стадии 503 принятия решения, после чего способ продолжает выполняться так, как это описано выше. Если время не истекло, то осуществляется возврат к предыдущей стадии, а сообщение сохраняется до тех пор, пока проверка на наличие полосы пропускания не будет выполнена повторно.
Для установления факта сцепления (или отсутствия сцепления) двух и более железнодорожных вагонов или двух или более сцепок, как это показано на фиг. 4, могут быть использованы следующие способы:
По движению: Если акселерометр и/или датчик движения и/или ГНСС фиксируют движение одного или более железнодорожного вагона, то сравниваются временные метки с тем, чтобы определить вероятность сцепления двух или более железнодорожных вагонов.
По скорости и направлению: Если два или более железнодорожных вагона движутся с одной и той же скоростью и в одном и том же направлении, они считаются сцепленными.
По мощности сигнала в сети: Сцепление может быть выявлено путем сравнения мощности сигнала на двух или более железнодорожных вагонах с мощностью сигнала на других вагонах в беспроводной ячеистой сети депо. Мощность сигнала сопоставляется с мощностью сигнала на соседних вагонах, в отношении которых известно, что они сцеплены. Беспроводное сетевое соединение устанавливается в том случае, если на каждом из двух или более железнодорожных вагонов установлен блок БУС 101, который выполнен с возможностью поддержания связи с беспроводной сетью. Каждый блок БУС 101 характеризуется измеряемой мощностью сигнала; при этом для установления факта сцепления двух или более железнодорожных вагонов может быть использовано как само наличие сигнала, так и его мощность.
По ударным воздействиям: При сцеплении между собой двух и более железнодорожных вагонов регистрируется ударное воздействие с временной меткой. Временная метка по двум или более железнодорожным вагонам сравнивается с заданным отрезком времени для определения того, какие железнодорожные вагоны характеризуются временной меткой в пределах этого отрезка времени, что используется затем для установления факта сцепления вагонов. Кроме того, во время ударного воздействия создается положительный и отрицательный отклик; при этом профили волн положительного и отрицательного отклика сравниваются, и если оказывается, что они совпадают или схожи друг с другом, то железнодорожные вагоны считаются сцепленными.
По местоположению: Если показания в отношении местоположения двух или более железнодорожных вагонов говорят о том, что они располагаются в непосредственной близости от других вагонов, можно считать, что они сцеплены друг с другом. Уровень доверительной вероятности сцепления зависит от сложности устройства депо. Информация о местоположении может быть также получена с ГНСС.
По подбору сплайновой кривой: Имея сведения, по меньшей мере, по трем вагонам в железнодорожном составе, можно использовать их местоположение в сочетании с подбором сплайновой кривой для железнодорожных вагонов в составе. По мере формирования железнодорожного состава кривая наилучшего приближения может быть применена к вагонам, уже входящим в железнодорожный состав. Кривая наилучшего приближения должна вписываться в рамки геометрии железнодорожного пути. Эта кривая может быть использована для того, чтобы определить, не ошибочно ли маркирован железнодорожный вагон, как не входящий в железнодорожный состав, исходя из местоположения и приближения к сплайну.
По компасному курсу: Имея сведения, по меньшей мере, по трем вагонам в железнодорожном составе, можно использовать их местоположение в сочетании с курсовым углом примыкающих друг к другу железнодорожных вагонов (фиг. 8). По мере формирования железнодорожного состава для определения потенциально сцепленных вагонов может быть использовано разность этого угла между соседними железнодорожными вагонами. Этот угол должен вписываться в рамки геометрии железнодорожного пути. Разница по этому углу между железнодорожными вагонами может быть использована для того, чтобы определить, не ошибочно ли маркирован железнодорожный вагон, как не входящий в железнодорожный состав, исходя из местоположения и значений угла, соответствующих другим соседним вагонам в том же железнодорожном составе.
По событиям торможения: Во время торможения происходит изменение давления, вследствие чего изменяется состояние торможения каждого железнодорожного вагона. Это событие изменения давления воспринимается каждым последовательно соединенным железнодорожным вагоном от локомотива до последнего сцепленного вагона. Время наступления этого события используется для определения порядка следования сцепленных вагонов в железнодорожном составе.
В качестве примера можно привести испытание торможением. Испытание торможением должно быть проведено до того, как железнодорожный состав покинет депо. В этом случае давление в тормозных магистралях сцепленных железнодорожных вагонов доводится до стандартной величины. Это обеспечивает возможность отпускания тормозов. Во время испытания торможением происходит резкое падение давления для активации тормозов на каждом железнодорожном вагоне. Это событие резкого падения давления воспринимается каждым последовательно соединенным железнодорожным вагоном от локомотива до последнего сцепленного вагона. Время наступления этого события используется для определения порядка следования сцепленных вагонов в железнодорожном составе.
По AEI-меткам: Если два или более железнодорожных вагона сканируются одним и тем же AEI-ридером, для установления факта сцепления железнодорожных вагонов можно использовать время сканирования, разность или сдвиг по времени между сканированием каждого железнодорожного вагона и скорость каждого вагона.
Когда происходит «событие», либо асинхронно инициируемое внешним явлением (например, пуском двигателя), либо возникающее периодически, это событие регистрируется и передается в блок БУС или ПБШ, расположенный в депо или на железнодорожном составе. Датчики, установленные на разных подвижных объектах, регистрируют объект, время и подробности события. Некоторые (но не все) примеры датчиков и способов перечислены ниже:
- Ударное воздействие на подвижный объект - измеряется как ускорение g;
- Толчок автосцепки - особая форма ударного воздействия на подвижный объект, которое измеряется как ускорение g;
- Местоположение подвижного объекта по ГНСС - широта и долгота;
- Скорость и направление подвижного объекта - измеряется в ми/ч и (для направления движения) в градусах;
- Изменение давления в тормозной магистрали - измеряется в фунт/кв. дюйм;
- Сканирование AEI-метки на подвижном объекте - наличие метки (истина/ложь).
На фиг. 7 проиллюстрирован способ, посредством которого определяется
ориентация железнодорожного вагона в депо с помощью бортового компаса. Это способ, который реализуется на стадиях 161, 159 и 165, показанных на фиг. 2. Этот способ предусматривает несколько допущений. Во-первых, ориентация железнодорожного вагона может быть определена с допущением, что блок БУС установлен на железнодорожном вагоне в известном месте и с известной ориентацией. Также принято допущение, что известна ориентация железнодорожных путей в пределах депо относительно севера, как это показано на фиг. 7(a).
Если подвижный объект находится в движении, ориентация железнодорожного вагона может быть определена путем сравнения изменений курса по компасу (или их отсутствию) с течением времени параллельно направлению движения, которое определяется по обновляемым данным о местоположении, получаемым от ГНСС. Если вектор компаса совпадает с вектором, полученным за счет разницы между двумя или более точками ГНСС, то железнодорожный вагон движется в направлении конца В (если блок БУС установлен/ориентирован с учетом такого подхода). Это проиллюстрировано на фиг. 7(b). Если векторы направлены в разные стороны, то железнодорожный вагон движется в направлении конца А. Это проиллюстрировано на фиг. 7(c).
Если подвижный объект находится в неподвижном состоянии, то курс по компасу и данные о местоположении могут быть использованы для сравнения с известным компоновочным планом и данными об ориентации депо, хранящимися в системе (см. стадию 162 на фиг. 2). Направление стрелки компаса и местоположение по ГНСС будут использованы для сравнения с местоположением и ориентацией депо с целью определения направления железнодорожного вагона. Если подвижный объект находится в неподвижном состоянии, а местоположение депо неизвестно, то ориентация рассматриваемого железнодорожного вагона может быть сопоставлена с ориентацией других подвижных объектов в известной группе сцепленных вагонов (см. стадию 165 на фиг. 2).
Если известно, что сцеплено три или более железнодорожных вагона, то поскольку железнодорожный путь может изгибаться только на ограниченную и заданную величину, изменение курса по компасу будет небольшим (учитывая разницу в 180 градусов между противоположными направлениями). Если рассматриваемый подвижный объект находится в непосредственной близости к железнодорожным вагонам, которые используются в качестве ориентира, или которые сцеплены друг с другом в одном железнодорожном составе, то для определения его направления показание компаса может быть сопоставлено с соответствующими показаниями по другим подвижным объектам. Как и при использовании других способов, описанных в настоящем документе, результату может быть присвоен уровень доверительной вероятности (см. стадии 166 и 167 на фиг. 2).
На фиг. 8 проиллюстрирован способ, позволяющий определить, находятся ли два железнодорожных вагона на одном и том же железнодорожном пути или нет. Этот способ использует подбор сплайновой кривой для приложения кривой наилучшего приближения к подвижным объектам в железнодорожном составе. Любая кривая наилучшего приближения, выходящая за пределы геометрии железнодорожного пути, может указывать на то, что вагоны находятся на разных железнодорожных путях. Как и при использовании описанных выше способов, блоки БУС 101 должны устанавливаться на каждом железнодорожном вагоне в известных точках и с известной ориентацией. Эти точки расположения используются для попарного соединения подвижных объектов максимально близко друг к другу. Рассчитывается угол между железнодорожными вагонами, располагающимися близко друг к другу (в пределах изменяемого расстояния максимального зазора между ними) для определения относительной угловой разницы между железнодорожными вагонами, находящимися в непосредственной близости друг к другу. Показания ГНСС по двум железнодорожным вагонам используются для определения вектора каждого из них. Направление этого вектора сравнивается с курсом железнодорожного вагона по компасу (относительно севера). Если углы между вектором ГНСС и курсом по компасу небольшие, то вероятность того, что подвижные объекты находятся на одном и том же железнодорожном пути, очень высока. Если разница между вектором ГНСС и курсом по компасу высока, то маловероятно, что подвижные объекты находятся на одном и том же железнодорожном пути и сцеплены друг с другом. Разница в углах становится больше по мере распространения отклонений дальше по рельсовому пути.
К примеру, как показано на фиг. 8, при небольшом угле между подвижными объектами А и В высока вероятность того, что они сцеплены. При большом угле между подвижными объектами А и В маловероятно, что они сцеплены. Угол между подвижными объектами С и D также большой, и также маловероятно, что эти объекты находятся в сцепленном состоянии. Максимальное пороговое значение угла может быть использовано для того, чтобы определить, высока ли вероятность сцепления подвижных объектов между собой или нет. Как показано на фиг. 8, угол АВ представляет собой угол между железнодорожным вагоном А и железнодорожным вагоном В, который лежит в пределах Z градусов (т.е. в пределах геометрии одного железнодорожного пути). Угол ВС представляет собой угол между направлением железнодорожного вагона В и железнодорожным вагоном С, а угол CD - это угол между железнодорожным вагоном С и железнодорожным вагоном D. Угол BD отображает разность между углом ВС и углом CD. Если угол BD превышает Z градусов, то можно сказать, что вагон С находится на рельсовом пути, отличном от того, на котором находятся вагоны В и D. Если нет, то высока вероятность того, что вагон С находится на том же рельсовом пути, что и вагоны В и D. Пороговое значение в Z градусов определяется геометрией железнодорожных путей.
Для определения уровня доверительной вероятности результатов различных расчетов, которые могут быть логически выведены из данных, собранных с каждого железнодорожного вагона, в том числе, например, в отношении того, какие вагоны сцеплены друг с другом, используется механизм статистической логики. Для объединения нескольких разных входных данных по событиям разного типа и с разными единицами измерения с целью получения единого результата, исходя из известных сведений об этих других событиях, используется условная вероятность.
Для каждого способа, компонента системы и события предоставляется вероятностный график с тем, чтобы определить разницу между событиями, происходящими на двух разных подвижных объектах. В зависимости от используемого способа разница между событиями или данными, полученными с датчиков по двум (или более) подвижным объектам, отображается по оси X.
Каждый датчик (связывающий компонент системы и событие) и способ характеризуется кривой распределения вероятностей, показывающей вероятность сцепления между собой двух подвижных объектов; при этом по оси X может быть отложено измеренное событие, время между событиями или и то и другое (в виде трехмерного графика), а по оси Y - вероятность сцепления между собой двух подвижных объектов. При этом не гарантируется, что событие сцепления имело место при конкретном измерении X, а это измерение лишь указывает на возможность того, что событие сцепления имело место. Величина 1,0 на графике указывает на возможность события при использовании датчика этого типа или способа. Величина 0,0 на графике исключает событие сцепления, полностью аннулируя все прочие кривые входного сигнала датчика. Примеры вероятностных графиков представлены на фиг. 10, где на фиг. 10(a) показана кривая распределения вероятностей для времени между событиями ударного воздействия по двум железнодорожным вагонам, а на фиг. 10(b) показана кривая распределения вероятностей для расстояния между двумя подвижными объектами.
После получения данных о событиях по множеству подвижных объектов генерируется вероятностный результат, основанный на данных, доступных на этот момент времени. Если анализ событий по подвижным объектам не подтверждает событие сцепления (или факт соединения между собой железнодорожных вагонов), события сохраняются и могут быть повторно обработаны при возникновении других событий, связанных с парой подвижных объектов.
Один из примеров приведен на фиг. 11. На фиг. 11(a) проиллюстрировано получение информации о времени ударных воздействий, где показано, что разница во времени между двумя ударными воздействиями, измеренными по двум железнодорожным вагонам, составляет 0,19 секунд, что дает выходное значение 0,85. Это говорит о том, что вероятность сцепления составляет 85%. На фиг. 11(b) показано, что разница в расстоянии между двумя железнодорожными вагонами составляет 55 метров, что дает выходное значение 0,62. Это говорит о том, что вероятность сцепления составляет 62%.
Важно учитывать неточности и погрешности разных датчиков и способов при построении кривых распределения вероятностей и присваивании весовых коэффициентов разным способам. Кривая не должна иметь уровень вероятности, превышающий заданную точность. В предпочтительном варианте более точным и прецизионным способам присваивается более высокий весовой коэффициент, чем другим способам.
При самой простой реализации алгоритма отдельные вероятности перемножаются друг на друга для получения общей вероятности того, что сцепление имело место, которая в этом примере составляет 0,527. При этом расчете не использовались входные данные других датчиков и данные за прошлый период или не применялась изменяемая средневзвешенная величина, но все эти вероятности входят в объем настоящего изобретения.
Выходное значение сравнивается с заданным пользователем пороговым значением, подтверждающим событие сцепления. Если, например, было задано пороговое значение 0,75, то этот случай должен быть отмечен как «Сцепление не подтверждено». Однако анализ может быть выполнен повторно после получения новых данных в отношении рассматриваемых объектов.
Предусмотрено минимальное пороговое значение, которое должно быть достигнуто или превышено для того, чтобы можно было подтвердить событие сцепления. Состояние пары подвижных объектов в отношении их сцепления друг с другом определяется как «Сцеплены», «Не сцеплены» или «Нет данных». Состояние «Сцеплены» указывает на то, что рассчитанный результат превышает минимальное пороговое значение. Состояние «Не сцеплены» указывает на то, что расчет был произведен, но его результат оказался ниже минимального порогового значения. Однако вероятность сцепления этой пары подвижных объектов может быть рассчитана повторно после получения новых данных по этим объектам и их соответствующих компонентам. Состояние «Нет данных» указывает на отсутствие показаний датчика по рассматриваемой паре подвижных объектов.
Помимо заранее заданных кривых распределения вероятностей могут быть использованы показатели за прошлый период для этих же кривых X и Y для сравнения полученных результатов с гистограммой событий и верифицированных результатов. В необязательном варианте вместо заранее заданных кривых распределения вероятностей или в сочетании с заранее заданными кривыми распределения вероятностей (с перемножением друг на друга двух результатов по одному датчику) могут быть использованы гистограммы показаний датчика, чтобы показать доверительную область в обоснованном результате по сцеплению подвижных объектов (и количество событий). Соответствующий пример приведен на фиг. 12, где на фиг. 12(a) показана гистограмма данных за прошлый период в отношении разницы во времени ударного воздействия, а на фиг. 12(b) показана разница в расстоянии.
В другом варианте осуществления настоящего изобретения разновидность гистограммного способа, представленного на фиг. 12, может быть использована для определения точности самого допущения сцепления подвижных объектов. Иначе говоря, гистограмма показывает, насколько часто результат был корректным (сцеплены или не сцеплены), вместо того, чтобы показывать лишь то, насколько часто фиксировался сам факт события сцепления подвижных объектов.
Этот способ позволяет использовать множество разных параметров и входных данных для генерирования условной вероятности события сцепления. Например, два железнодорожных вагона сцепляются друг с другом в депо, для чего используется локомотив, движущийся со скоростью около 3 ми/ч. Событие регистрируется двумя отдельными акселерометрами автосцепки, которые оба фиксируют события пикового ударного воздействия с ускорением 7 g с интервалом в 1 миллисекунду. На трехмерном вероятностном графике показаний акселерометра автосцепки по оси X откладывается разница во времени, по оси Z откладывается разница в ускорении g, а по оси Z откладывается результирующая вероятность (от 0,0 до 1,0). После того, как событие произошло, блок ПБШ запрашивает данные о местонахождении и скорости обоих подвижных объектов, а результат передается обратно в ПБШ с указанием на то, что оба объекта в данный момент находятся в неподвижном состоянии. Кривая разности в скорости используется в сочетании с разницей во времени и разницей в ускорениях g для выдачи второго входного сигнала, что приводит к получению значения, превышающего пороговое значение, которое используется для того, чтобы пометить подвижные объекты как находящиеся в процессе сцепления.
В одном из вариантов осуществления настоящего изобретения можно динамически добавлять, модифицировать и удалять из системы кривые распределения вероятностей, соотносящиеся с датчиками и способами. Для автоматического генерирования кривых по данным за прошлый период после получения окончательных поездных ведомостей могут быть использованы алгоритмы машинного обучения.
В другом варианте осуществления настоящего изобретения система может конфигурироваться пользователем. Выбор способа и датчика может быть отмечен как доступный, отклоненный или потребный. Кроме того, может быть указано минимальное количество четко различимых способов, необходимых для выполнения анализа (например, необходимо два или более способа, иначе не будет сгенерирован результат).
В еще одном из вариантов осуществления настоящего изобретения система также выполнена с возможностью контроля кривых распределения вероятностей для каждого способа, компонента системы и события. Для каждого датчика, имеющего взаимнооднозначное соответствие с более точными способами измерений, при наличии такой возможности, может быть предусмотрена иерархия кривых. Например, может быть предусмотрена общая кривая распределения вероятностей в отношении ударного воздействия, но если подвижный объект снабжен датчиком ударных ускорений, установленным на автосцепке железнодорожного вагона, то в отношении события ударения автосцепки может быть применена эта более четкая кривая распределения вероятностей вместо кривой ударного воздействия более высокого уровня. В случае если один подвижный объект снабжен датчиком, имеющим взаимно-однозначное соответствие с более точным способом измерения, а по другому объекту отображается кривая более высокого уровня, то может быть предусмотрена возможность подтверждения или отклонения сопоставления этих объектов.
В еще одном из вариантов осуществления настоящего изобретения имеется возможность предусмотреть относительный весовой показатель для разных способов. Например, местоположение двух сцепленных железнодорожных вагонов по ГНСС может считаться в четыре раза более значимым, чем курс по компасу для установления факта сцепления.
Система также выполнена с возможностью использования данных за прошлый период и конечного результата, полученных извне, для валидации событий сцепления по известным выходным данным. Эта обратная связь используется для улучшения кривых распределения вероятностей и расширения доверительных областей для входных данных разных способов, компонентов системы и событий. Например, если железная дорога предоставляет окончательную поездную ведомость по составленным железнодорожным составам, то эти фактические данные могут быть использованы для проверки допущений в отношении сцепок железнодорожных вагонов, и их маркировки как обоснованных или необоснованных.
В системе также предусмотрено конфигурируемое пользователем окно времени, указывающее на период времени, когда хронологические события применимы для анализа. Окно времени показывает, в течение какого периода имеющиеся данные могут быть использованы для анализа, исходя из типа каждого датчика или способа.
Согласно еще одному из аспектов настоящего изобретения система выполнена с возможностью определения порядка следования вагонов в железнодорожном составе. Для определения места вагона в составе может быть использовано любе сочетание описанных ниже способов.
Используя данные за прошлый период и любые сочетания описанных выше «связывающих» алгоритмов, можно определить ориентацию и порядок следования вагонов в железнодорожном составе, исходя из времени наступления события и железнодорожных вагонов, входящих в каждую сцепку.
Система также использует физические ограничения для принятия или отбраковки событий, которые приводят к сцеплению. Например, один подвижный объект может быть сцеплен, максимум, с двумя другими подвижными объектами, так как на железнодорожном вагоне предусмотрено всего две автосцепки.
Временное сканирование AEI-метки и затраченное на это время дают положение вагона в железнодорожном составе и необязательно направление и скорость вагона, и могут быть использованы для валидации порядка следования и ориентации вагона в железнодорожном составе при его прохождении мимо AEI-метки (обычно при выходе состава из депо).
Может быть использовано местоположение железнодорожного вагона, однако не будет установлено направление движения, а уровень доверительной вероятности будет низким. Может быть использовано местоположение железнодорожного вагона вместе с курсом по компасу этого же вагона, однако не будет установлено направление движения.
Используя эффект «аккордеона» или тяги и толкания, акселерометр в блоке БУС каждого железнодорожного вагона регистрирует силу удара в момент приложения тяговых и толкающих усилий во время движения железнодорожного состава. Сила удара регистрируется с временной меткой и сдвигом и сравнивается с другими вагонами в железнодорожном составе. Такое движение порождает каскад событий в составе, при котором временные метки событий сравниваются для определения того, в каком порядке передвигаются два или более железнодорожных вагона. Если ударные воздействия и временные метки по двум или более железнодорожным вагонам обнаруживают временной разрыв, можно допустить, что в железнодорожном составе находится ряд неуправляемых вагонов.
Беспроводная ячеистая сеть депо или беспроводная ячеистая поездная сеть может определить, охватывается ли железнодорожный вагон этой сетью; и если да, то мощность сигнала железнодорожного вагона может быть сопоставлена с мощностью сигнала других железнодорожных вагонов, охваченных сетью. С помощью этого способа можно получить низкий уровень доверительной вероятности.
Существует множество способов валидации сформированного железнодорожного вагона при его выходе из депо. Могут собираться данные о местоположении, скорости, направлении, перемещении, мощности и трактах прохождения сигнала в сети. Использование этих опорных величин повышает уровень доверительной вероятности в отношении порядка следования и ориентации вагонов в железнодорожном составе, когда они согласуются со считающейся известной конфигурацией железнодорожного состава.
Согласно еще одному из аспектов настоящего изобретения направление, в котором движется состав, может быть определено путем применения одного или более способа, описанного ниже в привязке к фиг. 7.
Согласно аспектам настоящего изобретения можно определить направление и ориентацию железнодорожного вагона. Что касается ориентации, то желательно знать, обращен ли конец А или конец В железнодорожного вагона в сторону головы состава. Ориентацию концов А и В важно знать железным дорогам и перевозчикам, поскольку может быть необходимо, чтобы в месте своего назначения железнодорожный вагон был ориентирован таким образом, чтобы его конец А или В был обращен в определенную сторону. Как показано на фиг. 2, данные с датчиков и алгоритм обработки этих данных обеспечивают уровень доверительной вероятности того, что будет установлен нужный конец железнодорожного вагона. Блок БУС должен быть установлен с известной ориентацией; например, он может располагаться на конце В железнодорожного вагона. Для определения ориентации железнодорожного вагона направление блока БУС по компасу сравнивается с направлением севера. Кроме того, предпочтительно, чтобы направление депо было известно по данным за прошлый период и географическим данным, например, по рельсовому пути, проходящему в направлении с юго-запада на северо-восток (см. фиг. 7).
Если ориентация депо неизвестна, то для определения направления железнодорожного вагона могут быть использованы данные о местоположении и курс по компасу, по меньшей мере, трех сцепленных между собой железнодорожных вагонов путем сравнения направления железнодорожного вагона по компасу с направлением рельсового пути, выведенным по трем или более сцепленным железнодорожным вагонам. Если известна ориентация, по меньшей мере, одного железнодорожного вагона, то направление других сцепленных между собой вагонов может быть выведено путем сравнения направления железнодорожного вагона по компасу с известным направлением других вагонов в сцепке. Если известна ориентация, по меньшей мере, одного железнодорожного вагона, то направление других сцепленных между собой вагонов может быть выведено путем сравнения выдержки времени ударного воздействия во время события сцепления, измеренного на концах А и В железнодорожного вагона. Эта информация об ударном воздействии в сочетании с известной ориентацией одного из железнодорожных вагонов позволит определить ориентацию другого вагона.
Согласно еще одному из аспектов настоящего изобретения система может быть использована для выявления отцепа подвижных объектов или группы сцепленных между собой подвижных объектов от железнодорожного состава. Подобно выявлению сцепления подвижных объектов между собой, как это описано выше, отцеп одного или более объекта может быть установлен по взаимообратному событию. Подвижные объекты считаются сцепленными, если только не установлено иное любым из нижеперечисленных способов и в любом их сочетании.
По движению: Если акселерометр и/или датчик движения и/или ГНСС фиксируют движение одного или более железнодорожного вагона с разными значениями, то сравниваются временные метки с тем, чтобы установить факт отсутствия сцепления между двумя или более железнодорожными вагонами.
По скорости и направлению: Если два или более железнодорожных вагона не движутся с одной и той же скоростью и в одном и том же направлении, они считаются не сцепленными.
По мощности сигнала в сети: Отсутствие сцепления может быть выявлено путем сравнения мощности сигнала на двух или более железнодорожных вагонах с мощностью сигнала на других вагонах в беспроводной ячеистой сети депо. В тех случаях, когда мощность сигнала сопоставима с мощностью сигнала на вагонах, в отношении которых известно, что они не сцеплены, рассматриваемые вагоны считаются не сцепленными.
По местоположению: Если показания в отношении местоположения двух или более железнодорожных вагонов не сближаются в течение заданного периода времени, то маловероятно, что они сцеплены друг с другом. Уровень доверительной вероятности сцепления зависит от сложности устройства депо.
По подбору сплайновой кривой: Имея сведения, по меньшей мере, по трем вагонам в железнодорожном составе, можно использовать их местоположение в сочетании с подбором сплайновой кривой для железнодорожных вагонов в составе. Кривая наилучшего приближения может быть применена к вагонам, уже входящим в железнодорожный состав. Любая кривая наилучшего приближения, не вписывающаяся в рамки геометрии железнодорожного пути, может указывать на то, что вагоны не сцеплены.
По компасному курсу: Имея сведения, по меньшей мере, по трем вагонам в железнодорожном составе, можно использовать их местоположение в сочетании с курсовым углом примыкающих друг к другу соседних железнодорожных вагонов (фиг. 7). Для выявления потенциально не сцепленных между собой вагонов может быть использована разница в изменении этого угла между соседними железнодорожными вагонами; иначе говоря, в изменении направления железнодорожных вагонов, следующих один за другим. Этот угол должен вписываться в рамки геометрии железнодорожного пути.
По событиям торможения: Во время торможения происходит изменение давления, вследствие чего изменяется состояние торможения каждого железнодорожного вагона. Это событие изменения давления воспринимается каждым последовательно соединенным железнодорожным вагоном от локомотива до последнего сцепленного вагона в составе. Время наступления этого события используется для определения порядка следования сцепленных вагонов в железнодорожном составе. Если в железнодорожном вагоне не фиксируется аналогичное изменение давления, то маловероятно, что он является частью железнодорожного состава.
По AEI-меткам: Если два или более железнодорожных вагона сканируются одним и тем же AEI-ридером, для установления факта отсутствия сцепления между железнодорожными вагонами можно использовать время сканирования, разность или сдвиг по времени между сканированием каждого железнодорожного вагона и скорость каждого вагона.
Система также использует физические ограничения для дополнительной валидации сцепления подвижных объектов между собой. Например, направление на север двух железнодорожных вагонов в депо, в котором рельсовые пути проходят только в восточном/западном направлении, отменяет результаты сенсорного способа ГНСС для расчета.
Согласно еще одному из аспектов настоящего изобретения можно определить наличие «молчащего» железнодорожного вагона и сообщить об этом. «Молчащие» вагоны могут быть идентифицированы блоком ПБШ, установленным непосредственно на локомотиве; или же о наличии «молчащего» вагона может быть сообщено по беспроводной сети от блока БУС, установленного на одном или более вагоне в железнодорожном составе. Этот процесс проиллюстрирован на фиг. 9.
На локомотиве 108 установлен блок ПБШ 102, а на железнодорожном вагоне 103(a) или 103(b) установлен блок БУС 101, который может находиться в состоянии прослушивания радиопередач с других железнодорожных вагонов 103(a) или 103(b), не охваченных поездной сетью, не связанных с управляемым депо или находящихся в неуправляемом депо.
При прохождении локомотива 108 или блока БУС 101 мимо бокового пути, где отстаивается, по меньшей мере, один отслеживаемый железнодорожный вагон 103(a) или 103(b), локомотив 108 услышит передаваемую по радиоканалу идентификационную информацию с отслеживаемых вагонов 103(a) или 103(b). При обнаружении радиопередачи блок ПБШ, установленный на локомотиве 108, передаст идентификационную информацию о железнодорожном вагоне 103(a) или 103(b) в центр дистанционного управления железнодорожными перевозками.
Во втором варианте осуществления настоящего изобретения «молчащий» железнодорожный вагон будет находиться в режиме прослушивания/пассивном режиме для других сетей. Если железнодорожный вагон 103(a) или 103(b), входящий в состав беспроводной ячеистой поездной сети или сети депо, находится в пределах диапазона прослушивания «молчащим» вагоном, этот «молчащий» вагон будет слышать «уведомления», поступающие с железнодорожного вагона 103(a) или 103(b) в сети. «Молчащий» вагон будет отвечать на уведомления, поступающие с этого железнодорожного вагона, передавая также свои идентификационные данные и настройки, которые будут поступать в блок ПБШ 102. Блок ПБШ 102 имеет право разрешить «молчащему» вагону присоединиться к беспроводной ячеистой поездной сети или сети депо, передав соответствующую информацию через другие блоки БУС «молчащему» вагону. Если «молчащий» вагон внесен в черный список, то ему не будет выдано разрешение на присоединение к беспроводной ячеистой поездной сети. После присоединения железнодорожного вагона к сети он переходит в нормальный рабочий режим, и больше не является «молчащим» вагоном.
Важным аспектом настоящего изобретения является возможность измерения определенных параметров на подвижных объектах железнодорожного состава и соотнесения результатов измерений или событий с общей временной осью. Это позволяет делать логические выводы на основании относительных показателей. Эта же возможность играет большую роль в депо, позволяя коррелировать события по формированию железнодорожных составов или работу оборудования. Примером может служить возможность съема данных об ускорении подвижного объекта по каждому вагону в железнодорожном составе и использования относительного ускорения (или торможения) для выявления его захода/выхода в любой точке состава. Еще одним примером служит соотнесение событий удара колес с отдельными аномалиями рельсового пути, где выявить такую аномалию могут все колеса с одной стороны поезда, а мы хотим соотнести все события с одним признаком рельсового пути. К примеру, депо использует эту функциональную возможность для определения каскадного распространения событий сцепления, так как при формировании железнодорожного состава сила удара передается через несколько вагонов.
Управляемые подвижные объекты, находящиеся в депо или входящие в железнодорожный состав, синхронизированы с точным сетевым тактовым генератором; при этом точность времени синхронизирована по всем устройствам. В предпочтительном варианте осуществления настоящего изобретения, например, используется временная синхронизация с точностью более 1 миллисекунды. Это обеспечивает прямую корреляцию событий по всем подвижным объектам.
В ячеистой поездной сети или сети депо, где используется множество блоков БУС или БСУ с микроконтроллерами или микропроцессорами, при проведении измерения или обнаружении события уход тактового генератора становится ограничивающим достоверность фактором, который накладывается на временную ось любого измерения. В проводных или беспроводных системах постоянного питания с широкой полосой пропускания установившейся практикой является постоянная синхронизация тактовых генераторов с эталонным временем. Однако беспроводные автономные блоки БУС и БСУ с собственным источником питания использовали бы слишком большую ширину полосы пропускания и потребляли бы слишком много электроэнергии для поддержания жесткой временной синхронизации, необходимой для дифференциации определенных типов событий или принятия совокупности незамедлительных мер по всему составу. Уход тактового генератора становится особенно ограничивающим фактором при крайних значениях температуры или при резком изменении температуры в течение относительно короткого периода времени, что дополнительно усугубляется использованием множества дискретных сетей (например, ячеистой вагонной сети, связанной с ячеистой поездной сетью) и ячеистой топологией вместо сети прямой связи.
Настоящее изобретение обходит это ограничение за счет использования высокоточного задающего генератора сети, работающего в синхронизируемой по времени ячеистой сети, который используется для периодического (исходя из требуемой точности) приведения устройства синхронизации микроконтроллера к заданной точности. Например, в предпочтительном варианте осуществления настоящего изобретения желательна точность в 1 миллисекунду. Система также выполнена с возможностью использования широковещательного или запланированного события для инициации синхронизированной во времени выборки по всему железнодорожному составу и/или депо. Блоки БУС приводятся к времени ПБШ, а модули БСУ приводятся к времени БУС. Это обеспечивает одновременный съем данных по всем компонентам системы (ПБШ, БУС и БСУ) с точностью в пределах заданного диапазона без каких-либо негативного влияния на пропускную способность полосы частот сети или потребление электроэнергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОЕЗДОМ И ЖЕЛЕЗНОДОРОЖНЫМ ДЕПО | 2014 |
|
RU2640389C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ЭКСПЛУАТАЦИОННЫХ АНОМАЛИЙ В ПОЕЗДНЫХ СОСТАВАХ И ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНАХ | 2014 |
|
RU2677840C2 |
| Система мониторинга подвижного состава и инфраструктуры железнодорожного транспорта на основе беспроводных технологий | 2022 |
|
RU2794600C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ЭКСПЛУАТАЦИОННЫХ ХАРАКТЕРИСТИК ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2013 |
|
RU2613188C2 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ ПО СЕТИ ETHERNET МЕЖДУ ОБЪЕДИНЕННЫМИ ЭЛЕКТРОПОЕЗДАМИ ПО БЕСПРОВОДНОЙ СВЯЗИ | 2024 |
|
RU2829209C1 |
| Автоматизированная система контроля мотор-вагонного подвижного состава | 2021 |
|
RU2774509C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ О ПАРАМЕТРАХ ВАГОНОВ ПОДВИЖНОГО СОСТАВА ПОЕЗДА, АНАЛИЗА И ОБРАБОТКИ ДАННЫХ И ИХ ПЕРЕДАЧИ | 2019 |
|
RU2718160C1 |
| СИСТЕМА ДВУСТОРОННЕЙ БЕСПРОВОДНОЙ ОПТИЧЕСКОЙ СВЯЗИ | 2020 |
|
RU2750237C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
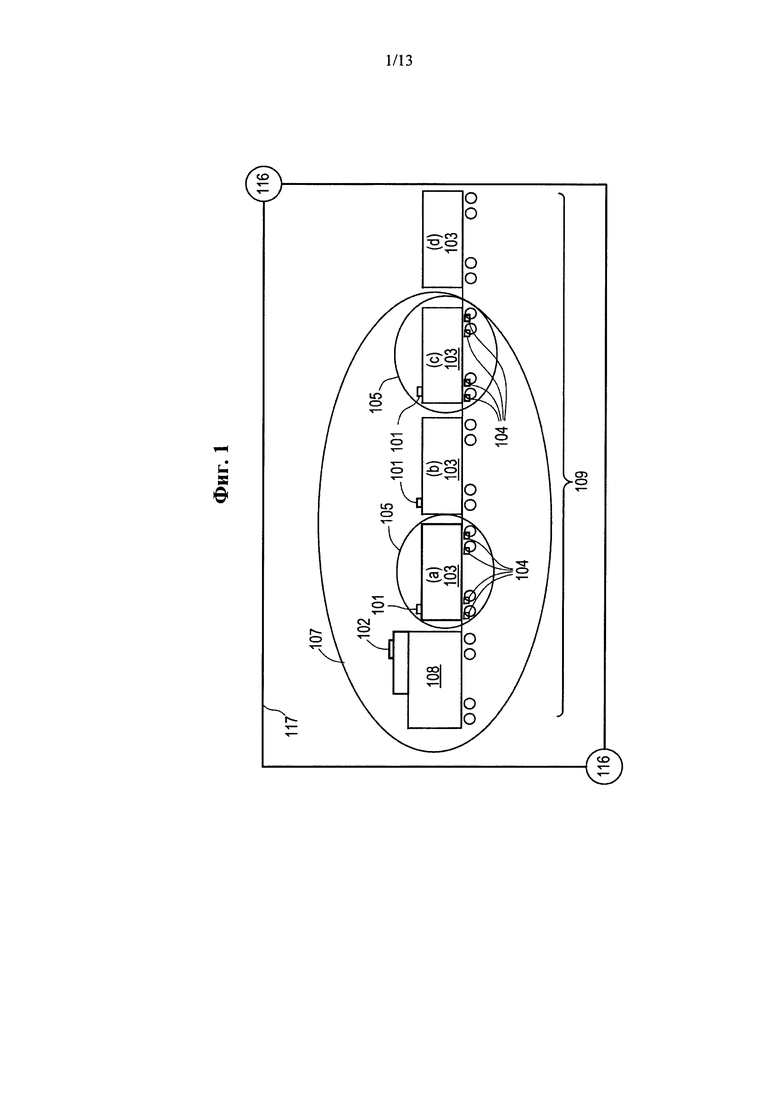
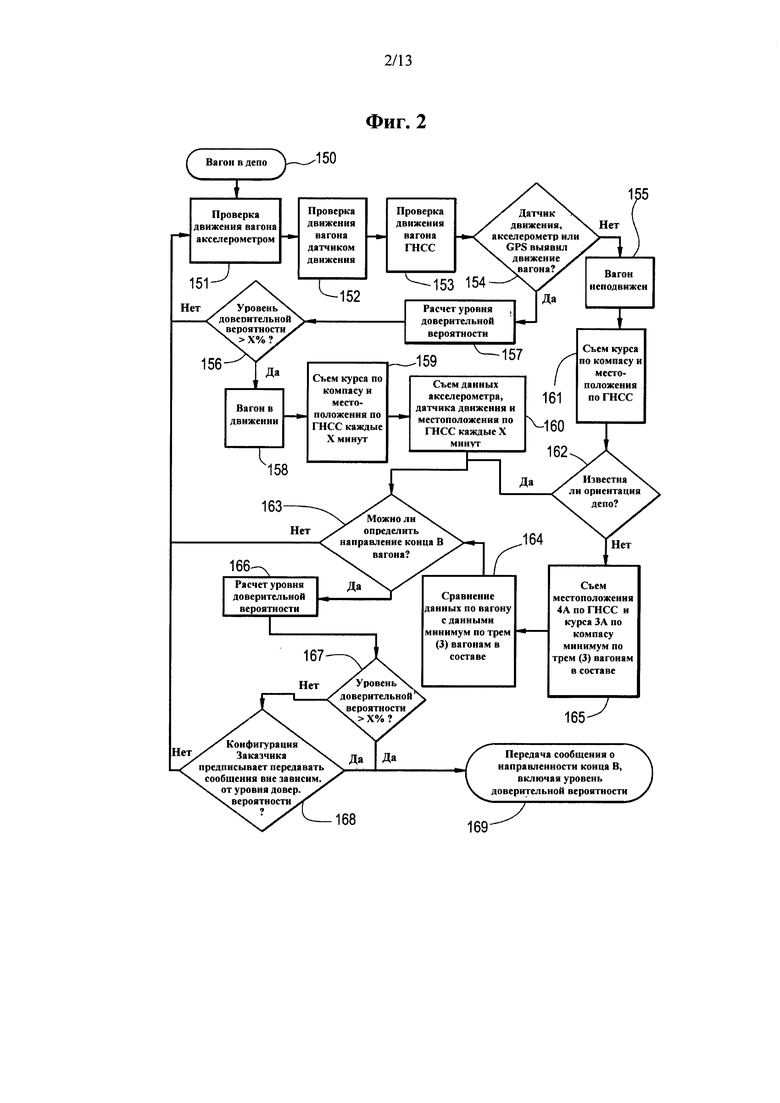
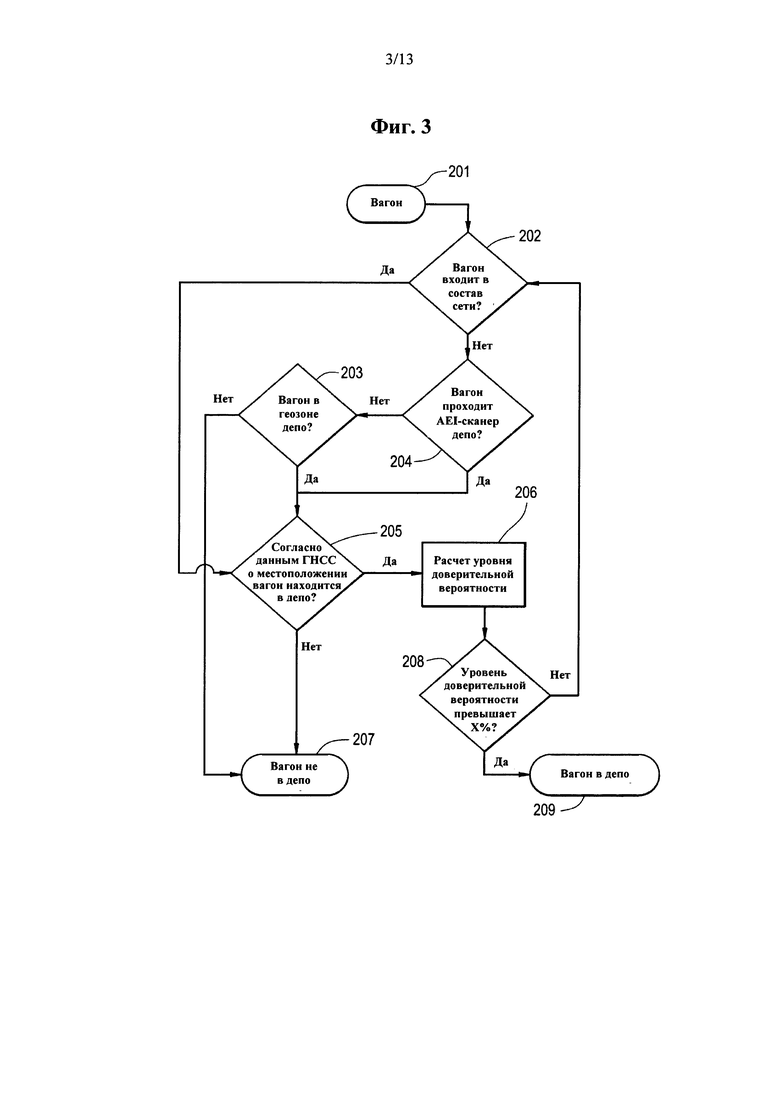
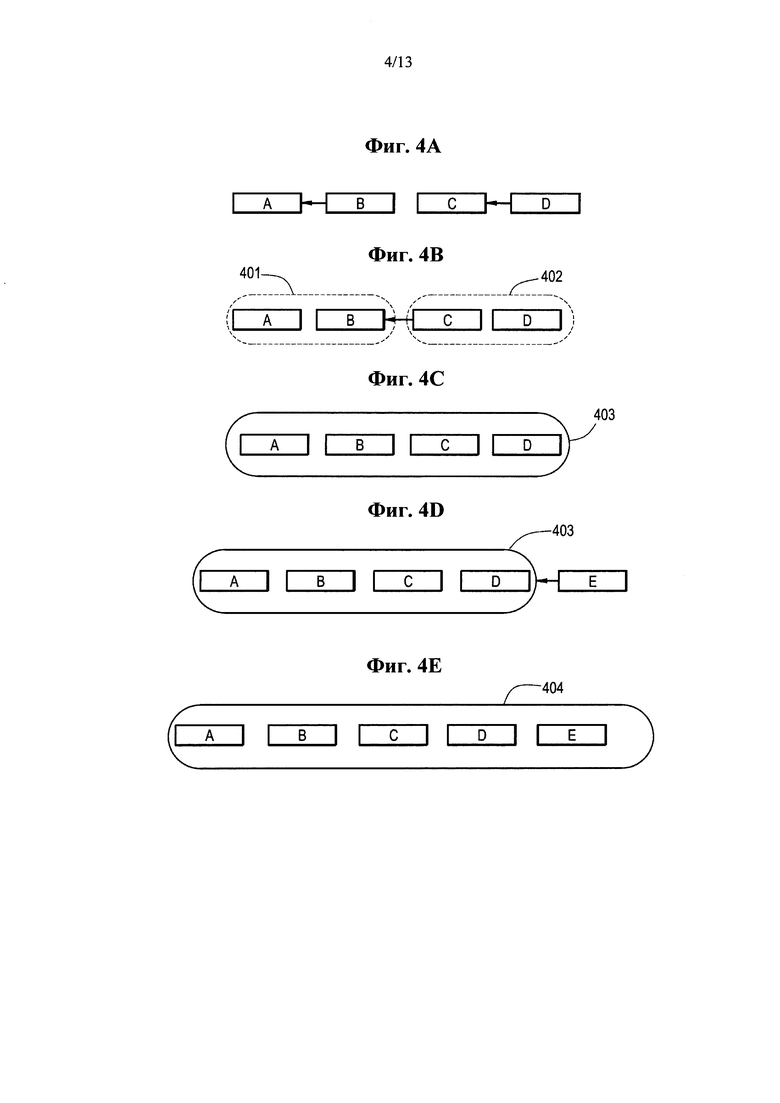
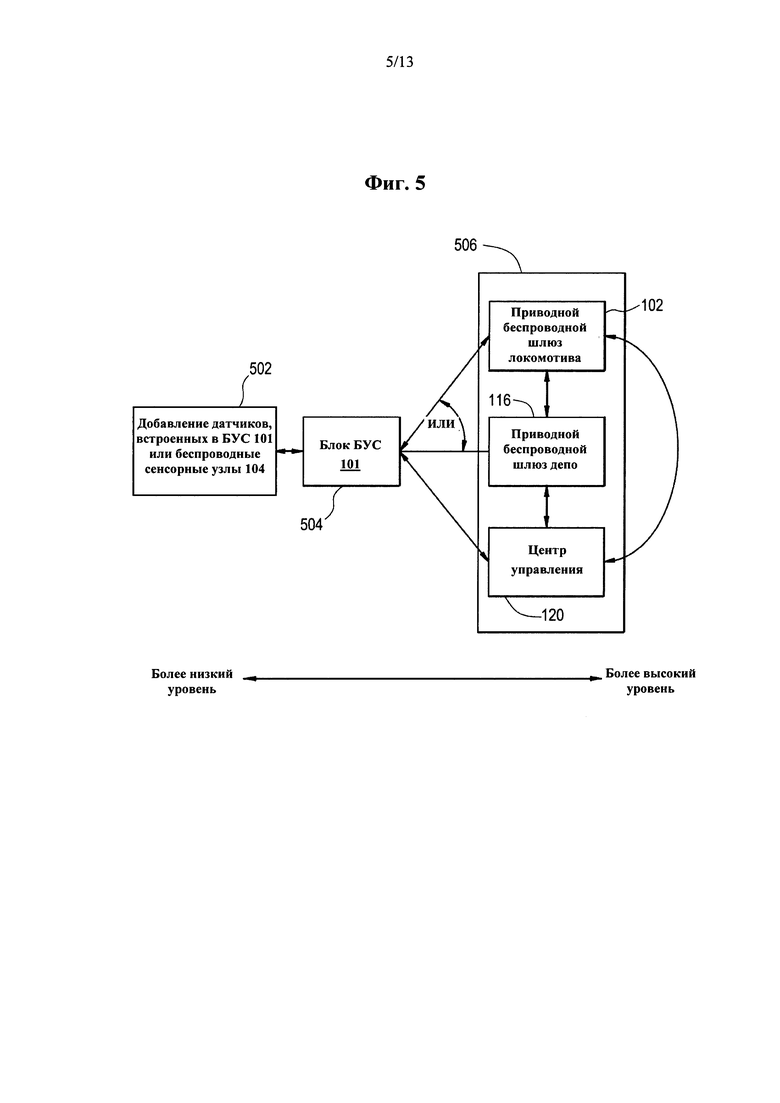
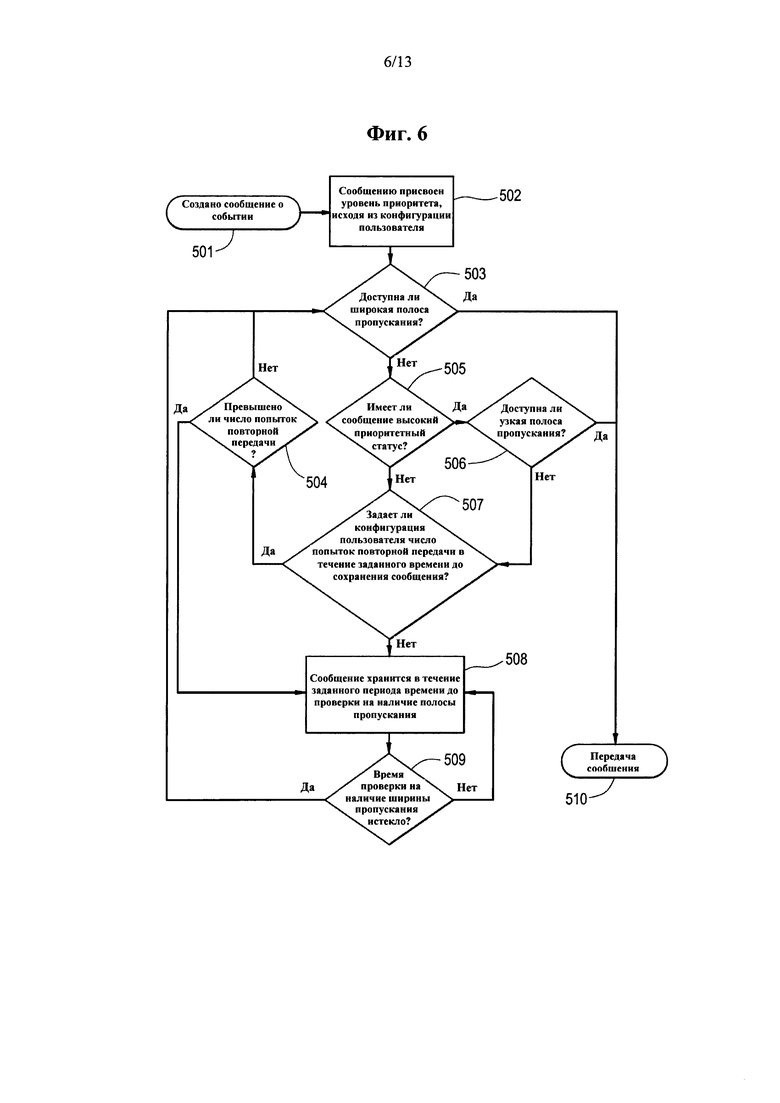
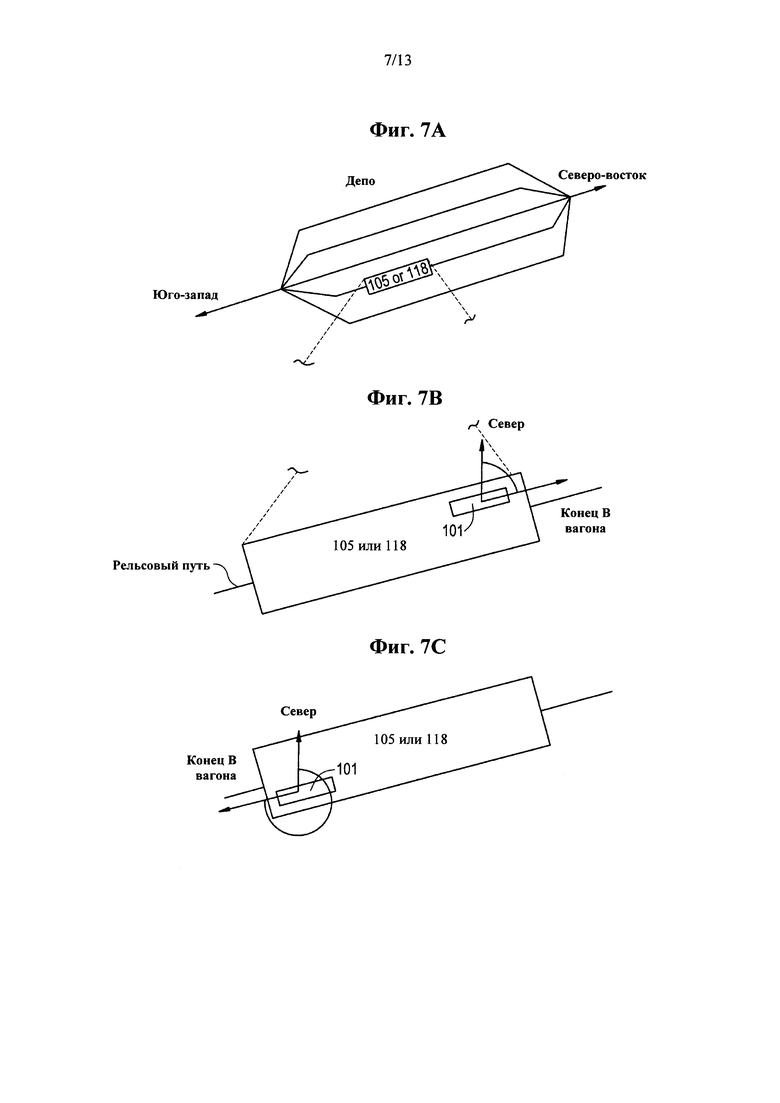
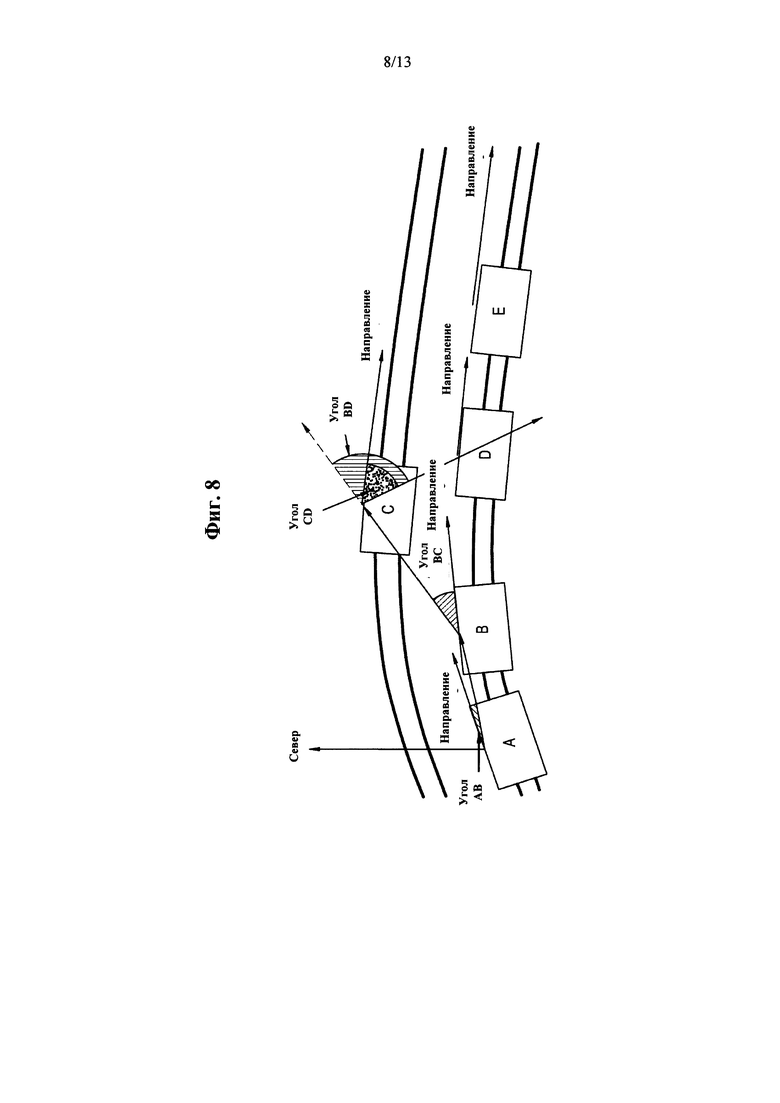
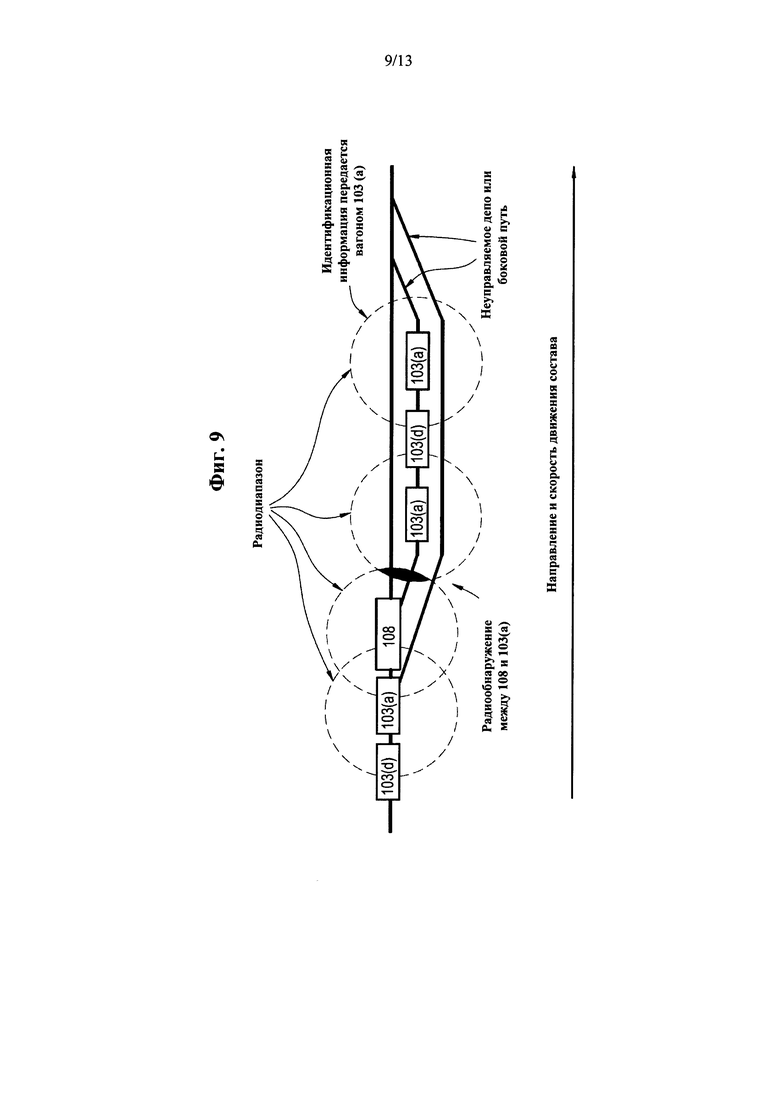
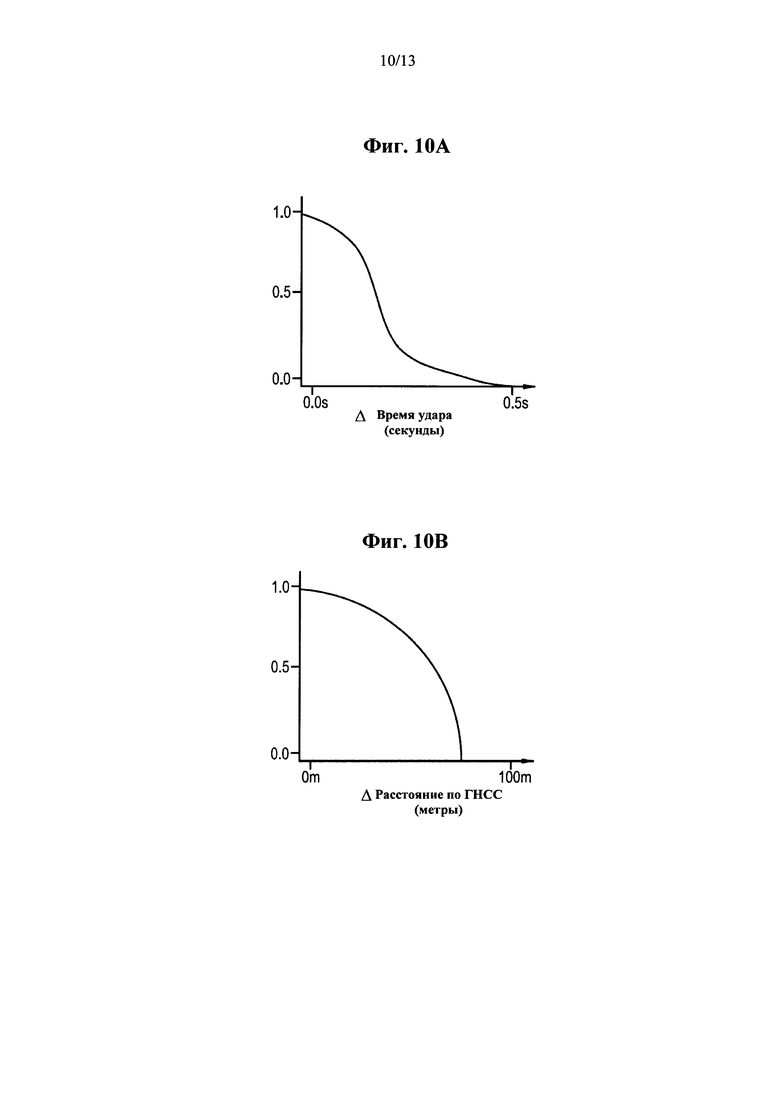
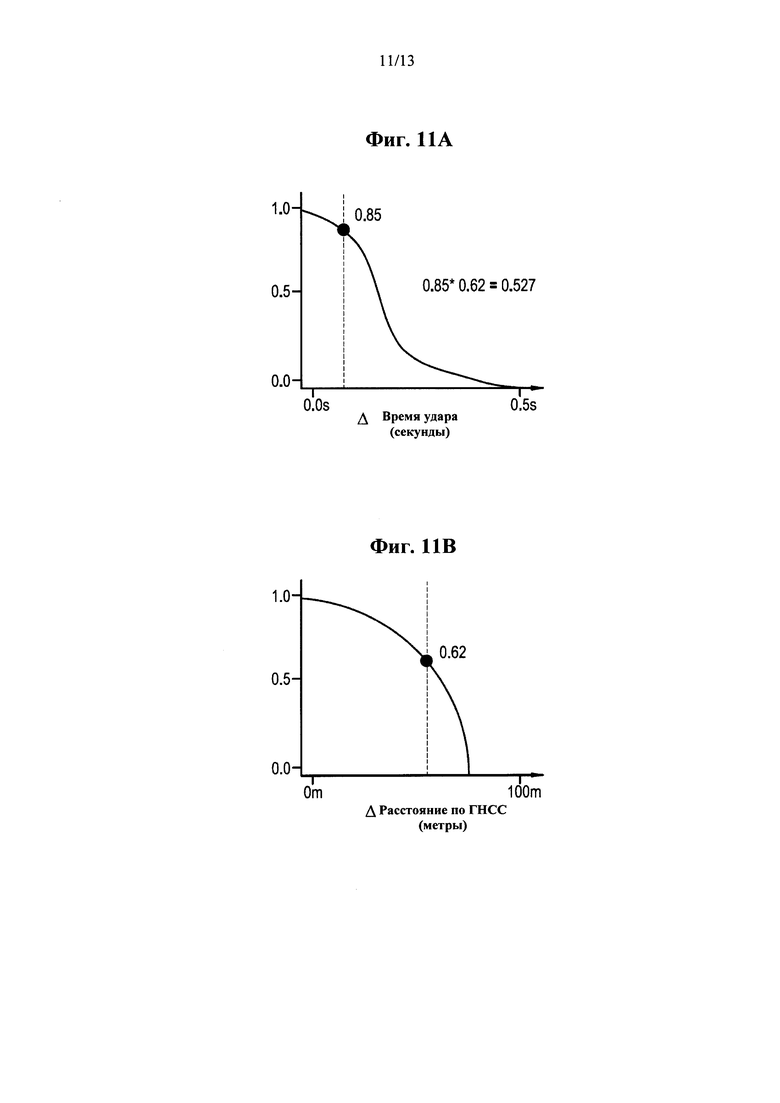
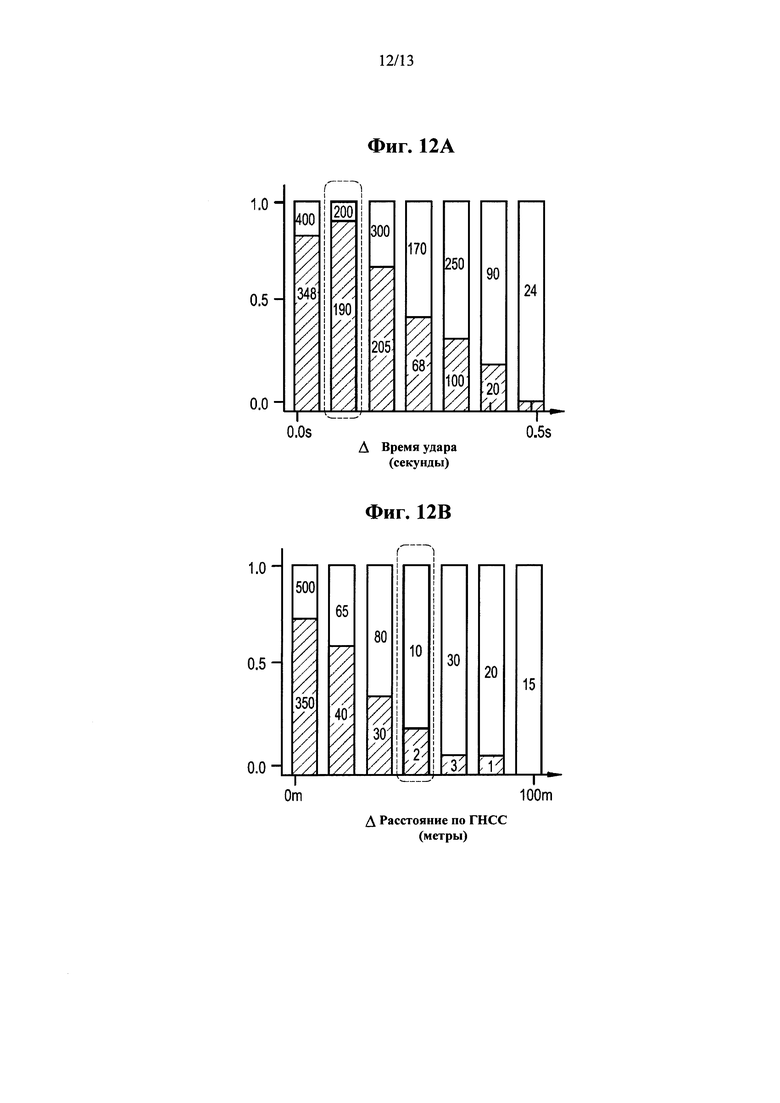
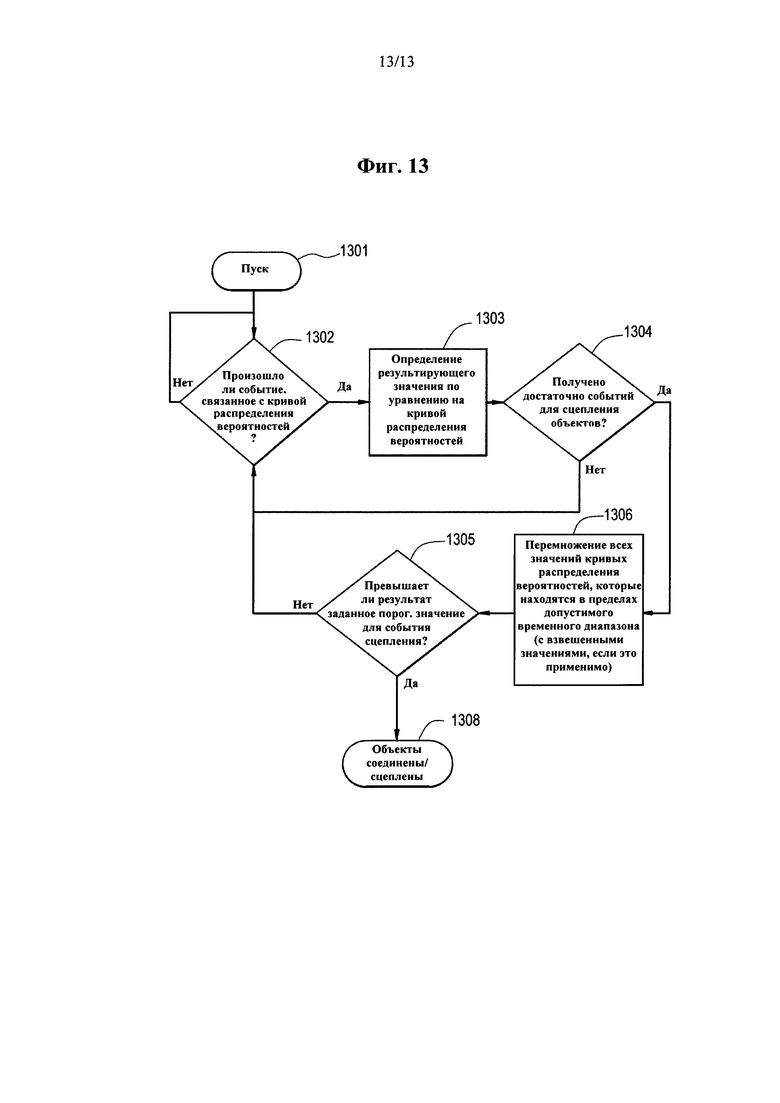
Изробретение относится к области железнодорожной автоматики и телемеханики для управления железнодорожными составами, их составления, роспуска и валидации, а также для отслеживания железнодорожных вагонов в депо. Система содержит один или более приводной беспроводной шлюз, установленный в депо; и один или более блок управления связью, установленный на железнодорожном вагоне; при этом приводные беспроводные шлюзы и блоки управления связью образуют сеть депо; вычислительное устройство, имеет доступ к указанной сети депо, а на вычислительном устройстве установлено программное обеспечение, выполняющее функции: получения данных с указанных блоков управления связью, установленных на железнодорожных вагонах, в отношении происходящих событий или состояний железнодорожных вагонов, на которых установлены указанные блоки; построения логических выводов по указанным данным в отношении состояния указанных железнодорожных вагонов; предоставление отчетов по указанным логическим выводам, логическим выводам присваиваются уровни доверительной вероятности, исходя из способов и имеющихся в наличии данных, используемых для построения логических выводов. Достигается повышение безопасности и эффективности управления депо. 2 н. и 18 з.п. ф-лы, 22 ил.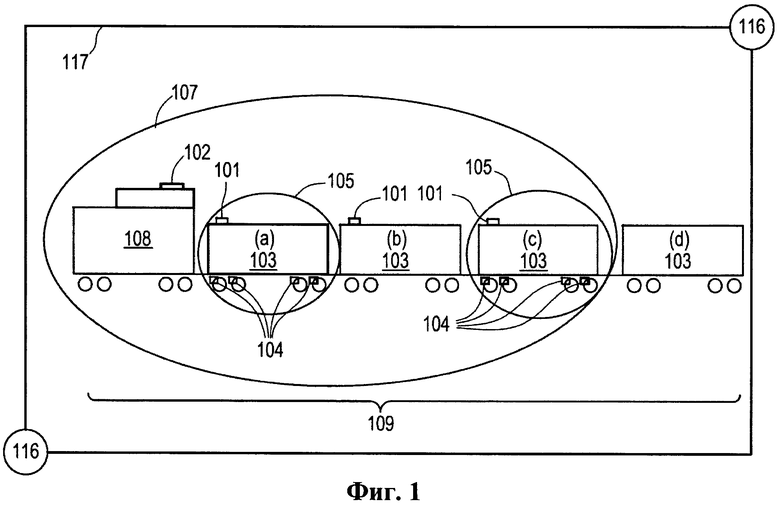
1. Система управления подвижными объектами в депо, содержащая:
один или более приводной беспроводной шлюз, установленный в депо; и
один или более блок управления связью, установленный на железнодорожном вагоне;
при этом указанные приводные беспроводные шлюзы и указанные блоки управления связью образуют сеть депо;
вычислительное устройство, имеющее доступ к указанной сети депо; при этом на указанном вычислительном устройстве установлено программное обеспечение, выполняющее следующие функции:
получение данных с указанных блоков управления связью, установленных на железнодорожных вагонах, в отношении происходящих событий или состояния соответствующих железнодорожных вагонов, на которых установлены указанные блоки;
построение логических выводов по указанным данным в отношении состояния указанных железнодорожных вагонов; и
предоставление отчетов по указанным логическим выводам.
2. Система по п. 1, в которой указанным полученным логическим выводам присваивается уровень доверительной вероятности.
3. Система по п. 2, в которой указанный уровень доверительной вероятности представляет собой вероятность того, что указанный логический вывод является истинным.
4. Система по п. 3, в которой указанный уровень доверительной вероятности представляет собой сочетание вероятностей по одному или более указанному событию.
5. Система по п. 4, в которой логический вывод считается истинным, если указанный уровень доверительной вероятности превышает заданное значение.
6. Система по п. 1, в которой к указанным событиям относится одно или более зафиксированное ударное воздействие, движение, ускорение, изменение местоположения по глобальной навигационной спутниковой системе (ГНСС), изменение скорости, изменение курса по компасу, изменение давления в тормозной магистрали и AEI-сканирование.
7. Система по п. 1, в которой указанным логическим выводом является установление факта нахождения железнодорожного вагона в пределах указанного депо.
8. Система по п. 7, в которой указанные полученные данные включают в себя данные AEI-сканирования и местоположение.
9. Система по п. 6, в которой указанным логическим выводом является установление местоположения и ориентации железнодорожного вагона в пределах указанного депо.
10. Система по п. 9, в которой указанные полученные данные содержат данные об ускорении, данные о движении, местоположение по ГНСС и курс по компасу.
11. Система по п. 1, в которой указанное программное обеспечение выполняет функцию последовательного формирования и валидации сформированного железнодорожного состава.
12. Система по п. 11, в которой указанная функция формирования железнодорожного состава предусматривает следующие стадии:
(а) выявление множества сцепок из двух или более железнодорожных вагонов; при этом указанные сцепки образуют общую сцепку, включающую в себя все вагоны указанного железнодорожного состава;
(b) выявление отцепов железнодорожных вагонов или сцепок, необходимых для формирования указанного железнодорожного состава;
(c) установление факта подцепления локомотива к указанной общей сцепке, включающей в себя все вагоны, входящие в железнодорожный состав; и
(d) построение беспроводной поездной сети, состоящей из управляющего устройства и по меньшей мере одного узла на каждом железнодорожном вагоне.
13. Система по п. 12, в которой факт установления указанных сцеплений подтверждается в том случае, если данные, полученные с каждого железнодорожного вагона, на котором установлен по меньшей мере один узел, поддерживают уровень доверительной вероятности, превышающий заданное пороговое значение.
14. Система по п. 13, в которой указанная стадия определения сцеплений предусматривает построение указанных логических выводов на основании данных, предоставляемых указанными сцепляемыми двумя или более железнодорожными вагонами.
15. Система по п. 14, в которой указанный механизм логических выводов использует один или несколько следующих типов данных, полученных с каждого железнодорожного вагона, принимающего участие в событии сцепления, для повышения или снижения уровня доверительной вероятности того, что указанные два или более железнодорожных вагона сцеплены:
(a) мощность сигнала указанной беспроводной ячеистой сети депо, принимаемого каждым железнодорожным вагоном;
(b) данные о движении;
(c) данные о скорости и направлении;
(d) данные о подборе сплайновой кривой;
(e) данные об угле по компасу;
(f) данные о событии торможения; и
(g) данные AEI.
16. Система по п. 1, в которой указанная функция валидации железнодорожного состава предусматривает следующие стадии:
(a) получение данных с одного или более железнодорожного вагона, на котором установлен по меньшей мере один узел; при этом указанные данные включают в себя по меньшей мере данные о скорости, местоположении и курсе по компасу;
(b) построение логических выводов по указанным полученным данным;
(c) верификацию того, что скорость, местоположение и курс по компасу каждого железнодорожного вагона, на котором установлен по меньшей мере один узел, согласуется с общим движением указанного железнодорожного состава.
17. Способ управления подвижными объектами в депо, предусматривающий использование программного обеспечения, которое выполняется на вычислительном устройстве, имеющем доступ к сети депо; при этом указанное программное обеспечение выполняет следующие функции:
(a) получение данных с одного или более блока управления связью, установленного на железнодорожном вагоне, в отношении происходящих событий или состояния соответствующих железнодорожных вагонов, на которых установлены указанные блоки;
(b) построение логических выводов по указанным данным в отношении состояния указанных железнодорожных вагонов; и
(c) предоставление отчетов по указанным логическим выводам.
18. Способ по п. 17, в котором указанное программное обеспечение дополнительно выполняют функцию присвоения уровня доверительной вероятности каждому из указанных сделанных логических выводов.
19. Способ по п. 18, в котором указанный уровень доверительной вероятности представляет собой вероятность того, что указанный логический вывод является истинным.
20. Способ по п. 19, в котором указанный уровень доверительной вероятности представляет собой сочетание вероятностей по одному или более указанному событию.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

