Изобретение относится к гироскопам вибрационного типа, в частности к микромеханическим гироскопам, которые предназначены для измерения угловой скорости движения основания.
Известен микромеханический гироскоп [RU №2279634, МПК G01C 19/56, опубл. 10.07.2006], с непрерывной стабилизацией первичных колебаний за счет использования системы фазовой автоподстройки частоты, длительными переходными процессами и как следствие обладающий невысоким быстродействием. Термозависимые характеристики системы фазовой автоподстройки частоты уменьшают стабильность амплитуды, частоты первичных колебаний и, как следствие, стабильность масштабного коэффициента микромеханического гироскопа.
Из патента RU №2656119 [МПК G01C 19/56 опубл. 30.05.2018], известен микромеханический гироскоп (прототип) который содержит подвижную массу на двухосном резонансном подвесе, неподвижное основание, подвижные и неподвижные электроды, образующие гребенчатый двигатель по оси возбуждения колебаний, подвижные и неподвижные электроды, расположенные по оси измерения выходного сигнала и образующие емкостной датчик, к выходу которого подключена система съема выходной информации, систему возбуждения и стабилизации первичных колебаний. Система возбуждения и стабилизации первичных колебаний микромеханического гироскопа содержит подвижные электроды двух конденсаторов гребенчатого двигателя, соединенные в общей точке, к которой последовательно подключены преобразователь ток-напряжение, синхронный детектор, фильтр нижних частот, аналого-цифровой преобразователь и микроконтроллер, который соединен с первым, вторым и третьим цифро-аналоговыми преобразователями. Выход первого цифро-аналогового преобразователя соединен со вторым входом синхронного детектора. Выход второго цифро-аналогового преобразователя через первый усилитель подключен к неподвижным электродам первого конденсатора гребенчатого двигателя. Выход третьего цифро-аналогового преобразователя подсоединен через второй усилитель к неподвижным электродам второго конденсатора гребенчатого двигателя.
К достоинствам прототипа следует отнести стабильность масштабного коэффициента, увеличенную за счет использования в системе возбуждения и стабилизации первичных колебаний синхронного детектирования синфазной и квадратурной составляющих в суммарном токе, протекающем через электроды гребенчатого двигателя, с последующим расчетом собственной резонансной частоты первичных колебаний микромеханического гироскопа. Существенным недостатком прототипа является двухтактная реализация возбуждения и стабилизации первичных колебаний, следствием чего является недостаточно высокое быстродействие и точность стабилизации частоты первичных колебаний.
Технической проблемой, которую решает данное изобретение, является повышение быстродействия микромеханического гироскопа.
Технический результат достигается тем что, в микромеханическом гироскопе, содержащем подвижную массу на двухосном резонансном подвесе, неподвижное основание, подвижные и неподвижные электроды, образующие гребенчатый двигатель по оси возбуждения колебаний, подвижные и неподвижные электроды, расположенные по оси измерения выходного сигнала и образующие емкостной датчик, к выходу которого подключена система съема выходной информации, систему возбуждения и стабилизации первичных колебаний, состоящую из подвижных электродов двух конденсаторов гребенчатого двигателя, соединенных в общей точке, и последовательно подключенного к ним преобразователя ток-напряжение, а также синхронного детектора, фильтра нижних частот, аналого-цифрового преобразователя, микроконтроллера и усилителя, в системе возбуждения и стабилизации первичных колебаний к преобразователю ток-напряжение параллельно подключены первый синхронный детектор и второй синхронный детектор, которые через первый фильтр нижних частот и первый аналого-цифровой преобразователь, и второй фильтр нижних частот и второй аналого-цифровой преобразователь, соответственно, соединены с микроконтроллером, выходы которого соединены с первым, со вторым, с третьим и с четвертым цифро-аналоговыми преобразователями, при этом выход первого цифро-аналогового преобразователя соединен со вторым входом первого синхронного детектора, выход второго цифро-аналогового преобразователя соединен со вторым входом второго синхронного детектора, выход третьего цифро-аналогового преобразователя соединен через первый усилитель с неподвижным электродом первого конденсатора гребенчатого двигателя, выход четвертого цифро-аналогового преобразователя соединен через второй усилитель с неподвижным электродом второго конденсатора гребенчатого двигателя микромеханического гироскопа.
Использование в микромеханическом гироскопе в системе возбуждения и стабилизации первичных колебаний двух ветвей: синхронный детектор - фильтр нижних частот - аналого-цифровой преобразователь для синхронного детектирования синфазной и квадратурной составляющих в суммарном токе, протекающем через электроды гребенчатого двигателя, с последующим расчетом собственной резонансной частоты первичных колебаний микромеханического гироскопа, позволяет за один такт измерений реализовать возбуждение и стабилизацию первичных колебаний, что увеличивает быстродействие работы микромеханического гироскопа в два раза.
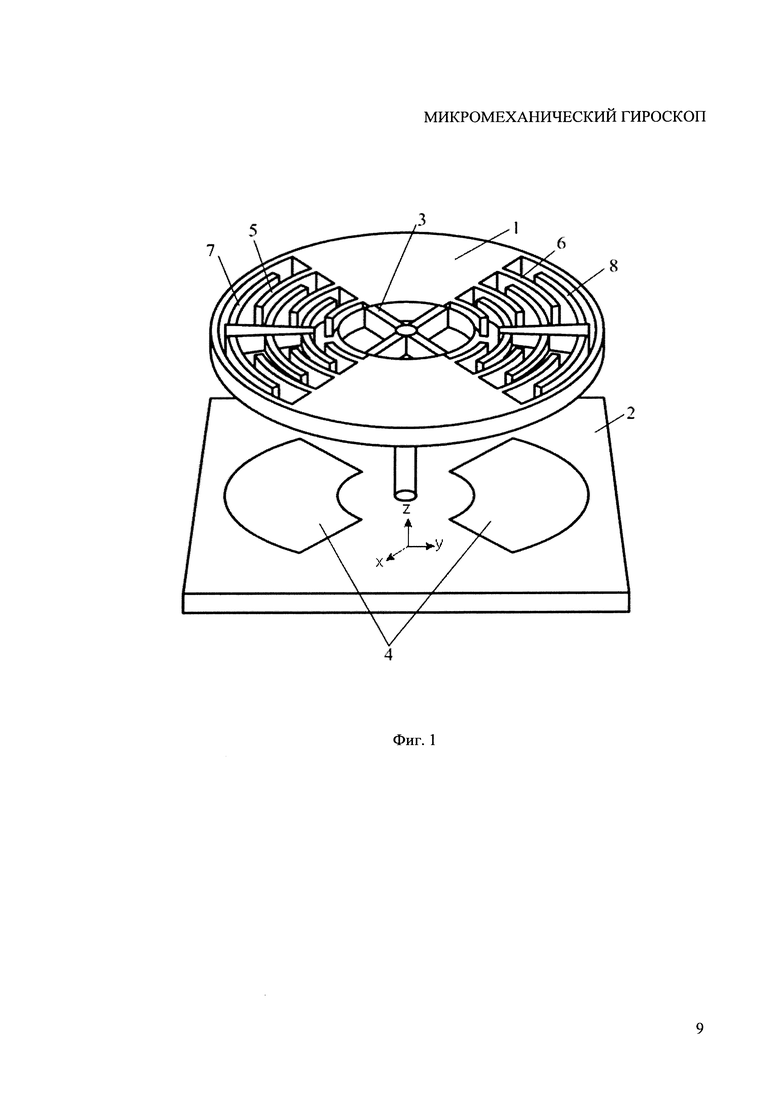
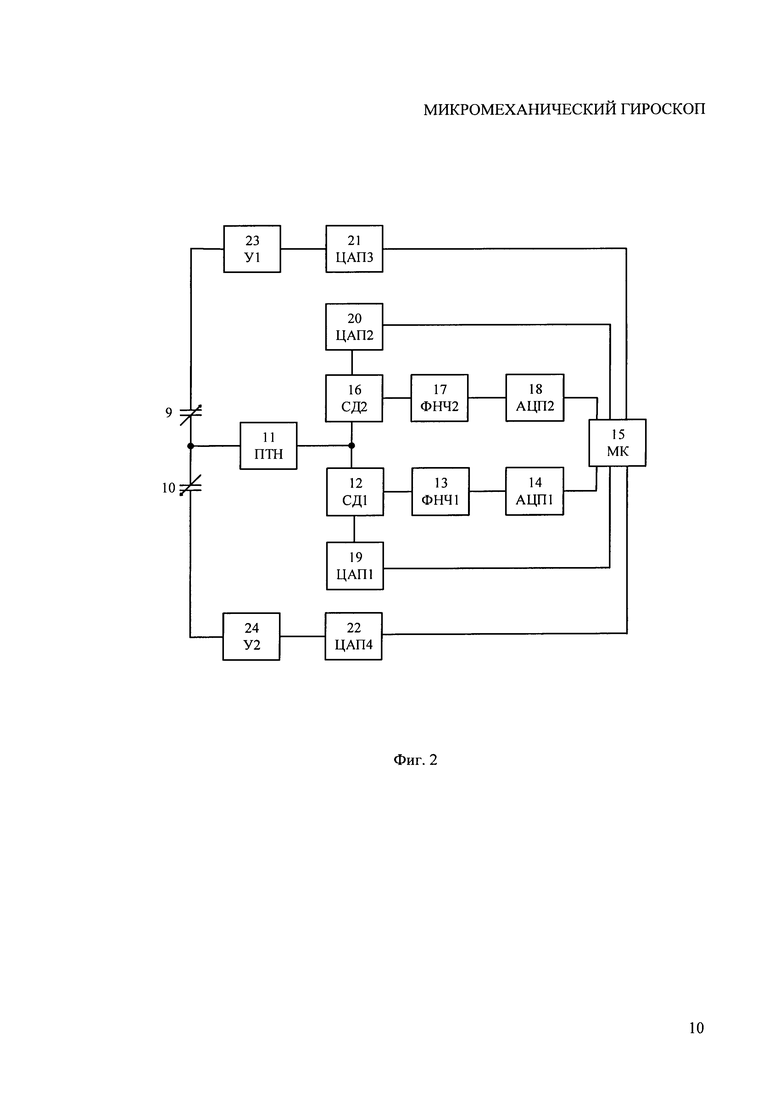
Изобретение поясняется следующими чертежами. На Фиг. 1 изображена конструкция микромеханического гироскопа. На Фиг. 2 представлена структурная схема системы возбуждения и стабилизации первичных колебаний микромеханического гироскопа. Микромеханический гироскоп содержит подвижную массу 1, выполненную в виде диска, который подвижен относительно основания 2. Подвижная масса 1 установлена на основании с помощью упругих элементов 3. Упругие элементы 3 жестко прикреплены одними концами к подвижной массе 1, а другими концами - к основанию 2. Упругие элементы 3 размещены в микромеханическом гироскопе с возможностью совершения угловых первичных колебаний подвижной массы 1 вокруг оси Z, перпендикулярной плоскости подвижной массы и вторичных колебаний подвижной массы вокруг осей X и Y в плоскости подвижной массы. На основании 2 с противоположных сторон закреплены неподвижные электроды 4, образующие с электродами, закрепленными на нижней поверхности подвижной массы 1, плоские конденсаторы, которые являются емкостными датчиками вторичных угловых колебаний подвижной массы 1 относительно основания 2. К выходу емкостного датчика подключена система съема выходной информации.
На подвижной массе 1 с двух противоположных сторон выполнены подвижные гребенчатые электроды 5, 6, образующие с неподвижными гребенчатыми электродами 7, 8 соответственно конденсаторы 9, 10 (Фиг. 2) электростатического гребенчатого двигателя.
Подвижные электроды 5, 6 конденсаторов 9, 10 гребенчатого двигателя соединены между собой в общей точке, к которой последовательно подключен преобразователь ток-напряжение 11 (ПТН). Преобразователь ток-напряжение 11 (ПТН) последовательно через первый синхронный детектор 12 (СД1), первый фильтр нижних частот 13 (ФНЧ1), первый аналого-цифровой преобразователь 14 (АЦП1) соединен с микроконтроллером 15 (МК), так же преобразователь ток-напряжение 11 (ПТН) последовательно через второй синхронный детектор 16 (СД2), второй фильтр нижних частот 17 (ФНЧ2), второй аналого-цифровой преобразователь 18 (АЦП2) соединен с микроконтроллером 15 (МК). Микроконтроллер 15 (МК) соединен с первым цифро-аналоговым преобразователем 19 (ЦАП1), со вторым цифро-аналоговым преобразователем 20 (ЦАП2), с третьим цифро-аналоговым преобразователем 21 (ЦАП3) и с четвертым цифро-аналоговым преобразователем 22 (ЦАП4). Выход первого цифро-аналогового преобразователя 19 (ЦАП1) соединен со вторым входом первого синхронного детектора 12 (СД1). Выход второго цифро-аналогового преобразователя 20 (ЦАП2) соединен со вторым входом второго синхронного детектора 16 (СД2). Выход третьего цифро-аналогового преобразователя 21 (ЦАП3) подсоединен через первый усилитель 23 (У1) к неподвижным электродам 7 конденсатора 9 гребенчатого двигателя. Выход четвертого цифро-аналогового преобразователя 22 (ЦАП4) подсоединен через второй усилитель 24 (У2) неподвижным электродам 8 конденсатора 10 гребенчатого двигателя микромеханического гироскопа.
Преобразователь ток-напряжение 11 (ПТН) может быть выполнен по типовой схеме преобразователя ток-напряжение на операционном усилителе. В качестве синхронных детекторов 12 (СД1) и 16 (СД2) могут использоваться любые аналоговые перемножители, например, AD734. Фильтры нижних частот 13 (ФНЧ1) и 17 (ФНЧ2) могут быть выполнены по схеме активного фильтра Бесселя нижних частот третьего порядка на частоту среза 0,1 Гц. В качестве аналого-цифровых преобразователей 14 (АЦП1) и 18 (АЦП2) могут быть использованы любые сигма-дельта аналого-цифровые преобразователи. Может быть использован любой 32-битный микроконтроллер 15 (МК). В качестве цифро-аналоговых преобразователей 19 (ЦАП1), 20 (ЦАП2), 21 (ЦАП3) и 22 (ЦАП4) могут быть использованы любые 14-битный цифро-аналоговые преобразователи с частотой дискретизации не менее, чем в 100 раз больше частоты возбуждения первичных колебаний микромеханического гироскопа. Усилители 23 (У1) и 24 (У2) могут выполнены на любых операционных усилителях, например, ОР270.
Устройство работает следующим образом.
Микроконтроллер 15 (МК) через интерфейс устанавливает выходные параметры первого цифро-аналогового преобразователя 19 (ЦАП1) по закону:

где Urm - амплитуда напряжения на выходе первого цифро-аналогового преобразователя 19 (ЦАП1), В; ω - частота напряжения, рад/с.
Одновременно микроконтроллер 15 (МК) через интерфейс устанавливает выходные параметры второго цифро-аналогового преобразователя 20 (ЦАП2) по закону:

третьего цифро-аналогового преобразователя 21 (ЦАП3) по закону:

четвертого цифро-аналогового преобразователя 22 (ЦАП4) по закону:

где Um - амплитуда напряжения, В; U0 - постоянное напряжение смещения, В.
Напряжение U1(t) с выхода третьего цифро-аналогового преобразователя 21 (ЦАП3) поступает на вход первого усилителя 23 (У1) и усиливается. Усиленное напряжение U1(t) с выхода первого усилителя 23(У1) поступает на конденсатор 9 гребенчатого двигателя микромеханического гироскопа. На конденсатор 10 гребенчатого двигателя микромеханического гироскопа поступает напряжение с выхода четвертого цифро-аналогового преобразователя 22 (ЦАП4), усиленное вторым усилителем 24 (У2). В результате, через конденсаторы 9, 10 гребенчатого двигателя начинает протекать ток, который поступает на вход преобразователя ток-напряжение 11 (ПТН) и преобразуется в пропорциональное напряжение. Напряжение с выхода преобразователя ток-напряжение 11 (ПТН) поступает на первый вход первого синхронного детектора 12 (СД1), на второй вход которого поступает напряжение с первого цифро-аналогового преобразователя 9 (ЦАП1). Напряжение с выхода синхронного детектора 12 (СД) фильтруется первым фильтром нижних частот 13 (ФНЧ1) и оцифровывается первым аналого-цифровым преобразователем 14 (АЦП1). Оцифрованное напряжение Up, пропорциональное синфазной составляющей суммарного тока, протекающего через конденсаторы 9 и 10 гребенчатого двигателя, передается и запоминается в микроконтроллере 15 (МК).
Параллельно напряжение с выхода преобразователя ток-напряжение 11 (ПТН) поступает на первый вход второго синхронного детектора 16 (СД2), на второй вход которого поступает напряжение со второго цифро-аналогового преобразователя 20 (ЦАП2). Напряжение с выхода второго синхронного детектора 16 (СД2) фильтруется вторым фильтром нижних частот 17 (ФНЧ2) и оцифровывается вторым аналого-цифровым преобразователем 18 (АЦП2). Оцифрованное напряжение Uq, пропорциональное квадратурной составляющей суммарного тока, протекающего через конденсаторы 9 и 10 гребенчатого двигателя, передается и запоминается в микроконтроллере 15 (МК).
Микроконтроллер 15 (МК) рассчитывает фазовый сдвиг ϕ в суммарном токе, протекающем через конденсаторы 9 и 10 гребенчатого двигателя, по формуле:

где U1 - напряжение с выхода преобразователя ток-напряжение, В; Е - значение деноминатора, В; Т - время интегрирования, с.
Если фазовый сдвиг не равен 90°, что соответствует максимальной амплитуде первичных колебаний микромеханического гироскопа, то микроконтроллер 15 (МК) рассчитывает собственную резонансную частоту сор первичных колебаний микромеханического гироскопа по формуле:
где Q - значение добротности канала первичных колебаний микромеханического гироскопа.
Затем микроконтроллер 15 (МК) через интерфейс изменяет значение частоты со на выходе третьего цифро-аналогового преобразователя 21 (ЦАП3) и четвертого цифро-аналогового преобразователя 22 (ЦАП4) на рассчитанное значение собственной резонансной частоты первичных колебаний микромеханического гироскопа.
Таким образом, за один такт измерений происходит возбуждение и стабилизация первичных колебаний микромеханического гироскопа вокруг оси Z.
При возникновении вращения (угловой скорости) основания 2 вокруг осей X и Y возникают силы Кориолиса, под действием которых подвижная масса 1 начинает совершать вторичные угловые колебания вокруг осей X и Y. Амплитуды этих колебаний, пропорциональные измеряемым угловым скоростям, преобразуются в электрические сигналы при помощи емкостных датчиков, образованных неподвижными пластинами 4, закрепленными на основании 2 и подвижными пластинами, закрепленными на нижней поверхности подвижной массы 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| СИСТЕМА УПРАВЛЕНИЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2018 |
|
RU2697031C1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2308682C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2289100C1 |
| УСТРОЙСТВО ВЛАГОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 2019 |
|
RU2699241C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ДАННОГО СПОСОБА | 2005 |
|
RU2296301C1 |
| СПОСОБ ВЫРАВНИВАНИЯ ПАРАМЕТРОВ КАНАЛОВ РЕГИСТРАЦИИ МНОГОКАНАЛЬНОГО НАНОПРОВОДНОГО ДЕТЕКТОРА | 2022 |
|
RU2791439C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| Микромеханический гироскоп | 2019 |
|
RU2714870C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2008 |
|
RU2370733C1 |
Изобретение относится к гироскопам вибрационного типа, в частности к микромеханическим гироскопам, которые предназначены для измерения угловой скорости движения основания. Сущность изобретения заключается в том, что в системе возбуждения и стабилизации первичных колебаний микромеханического гироскопа к преобразователю ток-напряжение параллельно подключены первый синхронный детектор и второй синхронный детектор, которые через первый фильтр нижних частот и первый аналого-цифровой преобразователь, второй фильтр нижних частот и второй аналого-цифровой преобразователь, соответственно, соединены с микроконтроллером, выходы которого соединены с первым, вторым, третьим и четвертым цифроаналоговыми преобразователями. Технический результат – повышение быстродействия микромеханического гироскопа. 2 ил.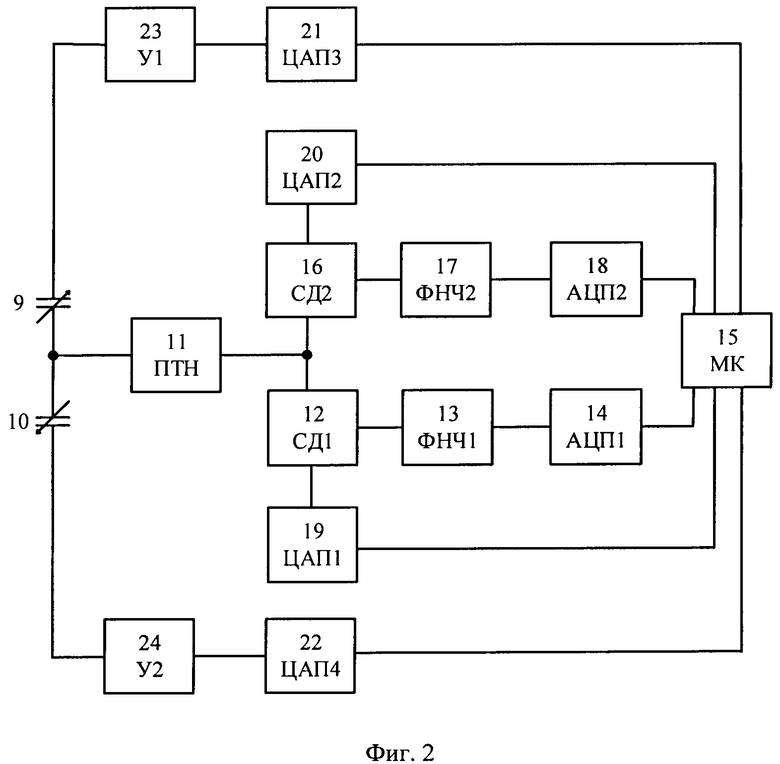
Микромеханический гироскоп, содержащий подвижную массу на двухосном резонансном подвесе, неподвижное основание, подвижные и неподвижные электроды, образующие гребенчатый двигатель по оси возбуждения колебаний, подвижные и неподвижные электроды, расположенные по оси измерения выходного сигнала и образующие емкостной датчик, к выходу которого подключена система съема выходной информации, систему возбуждения и стабилизации первичных колебаний, состоящую из подвижных электродов двух конденсаторов гребенчатого двигателя, соединенных в общей точке, последовательно подключенного к ним преобразователя ток-напряжение, а также синхронного детектора, фильтра нижних частот, аналого-цифрового преобразователя, микроконтроллера и усилителя, отличающийся тем, что в системе возбуждения и стабилизации первичных колебаний к преобразователю ток-напряжение параллельно подключены первый синхронный детектор и второй синхронный детектор, которые через первый фильтр нижних частот и первый аналого-цифровой преобразователь, второй фильтр нижних частот и второй аналого-цифровой преобразователь, соответственно, соединены с микроконтроллером, выходы которого соединены с первым, вторым, третьим и четвертым цифроаналоговыми преобразователями, при этом выход первого цифроаналогового преобразователя соединен со вторым входом первого синхронного детектора, выход второго цифроаналогового преобразователя соединен со вторым входом второго синхронного детектора, выход третьего цифроаналогового преобразователя соединен через первый усилитель с неподвижным электродом первого конденсатора гребенчатого двигателя, выход четвертого цифроаналогового преобразователя соединен через второй усилитель с неподвижным электродом второго конденсатора гребенчатого двигателя микромеханического гироскопа.
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2272994C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2447403C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| WO 1997045699 A2, 10.01.2002. | |||

