Изобретение относится к космической технике очистки околоземного космического пространства от крупногабаритных объектов, в частности к конструкции космических аппаратов (КА) - эвакуаторов, предназначенных для увода с рабочей орбиты отработавших спутников.
Известно устройство (патент RU 2601522) космического аппарата обслуживания (КАО) на орбите автоматического космического аппарата, предназначенного в том числе и для сведения с орбиты КА, не подлежащего восстановлению. На корпусе КАО размещена поворотная платформа, на которой размещен манипулятор захвата подлежащего восстановлению или уводу автоматического космического аппарата. Захват КА манипулятором осуществляется после совмещения продольных осей КА и КАО, закрутки поворотной платформы КАО (соосной продольной оси КАО) до скорости вращения КА. Недостатком устройства является сложность конструкции системы захвата, обоснованная только наличием дополнительной функции КАО - орбитального ремонта.
Ближайшим аналогом является устройство КА-эвакуатора (КАЭ) космических объектов, описанное в патенте US 7207525. На корпусе такого КА размещены несколько модулей, соединенных тросами с КА и снабженных собственной двигательной установкой, трехпальцевым захватом на телескопической штанге, камерой и датчиком расстояния. Модули могут отсоединяться от КА-эвакуатора, автономно подлетать к убираемому с орбиты спутнику, захватывать его, притягиваться обратно к КА-эвакуатору. Недостатками ближайшего аналога являются сложность устройства захвата (каждый модуль фактически является отдельным КА), а также невозможность работы конструкции в случае вращения объектов захвата.
Техническим результатом предлагаемого изобретения является создание относительно простого устройства космического аппарата-эвакуатора отработавших спутников, позволяющего осуществлять операции захвата крупногабаритных космических объектов с учетом их вращения и сведение с рабочей орбиты.
Технический результат достигается тем, что у космического аппарата-эвакуатора, содержащего корпус, устройства системы управления и электропитания, двигательную установку, электромеханическую систему захвата космического аппарата на орбите, на корпусе расположены не менее двух оптических камер, дальномер, раскрываемая штанга, барабан с тросом, закрепленным на барабане с возможностью перемещения вдоль штанги, при этом свободный конец троса снабжен съемным устройством захвата на орбите космического аппарата в виде защелки или манипулятора, барабан выполнен с возможностью реверсивного вращения, а трос выполнен в виде набора силовых, энергетических и информационных кабелей, устройство захвата закреплено на штанге электромеханическим замком и выполнено управляемым по кабелю.
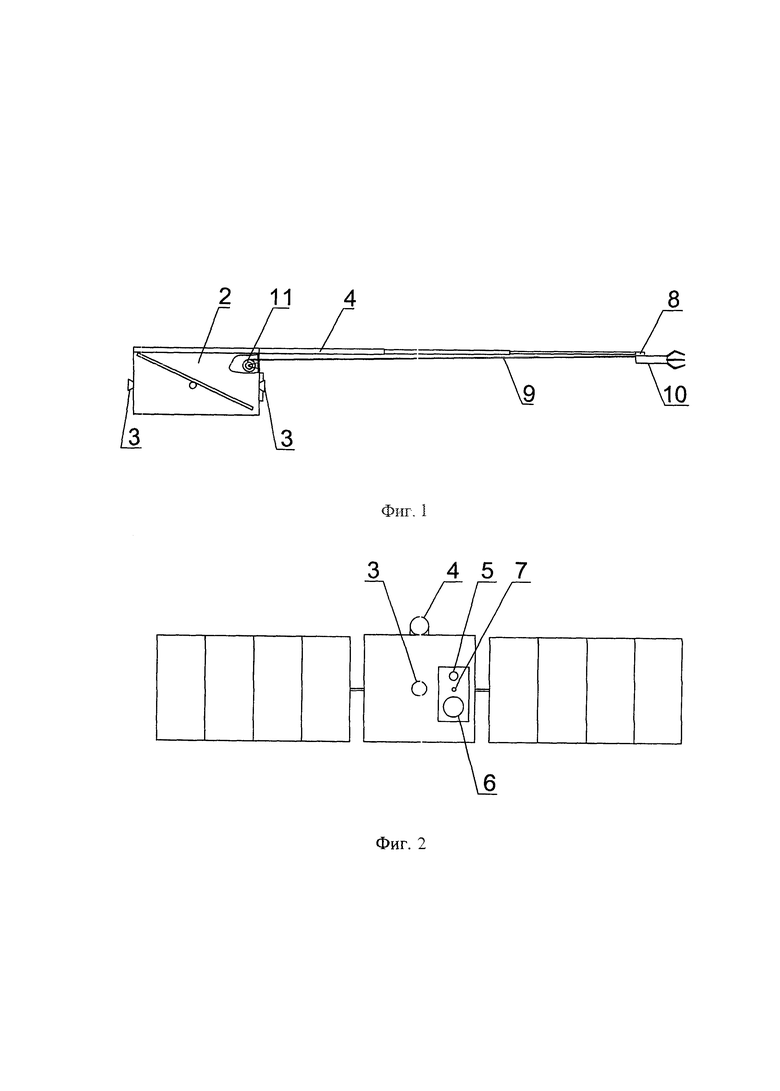
Схема устройства КАЭ приведена на фиг. 1, фиг. 2, принцип работы - на фиг. 3. Приняты обозначения:
1 - КА, подлежащий уводу;
2 - космический аппарат-эвакуатор;
3 - двигательная установка;
4 - штанга;
5 - оптическая камера низкого разрешения (обзорная);
6 - оптическая камера высокого разрешения (детальная);
7 - дальномер;
8 - замок;
9 - трос;
10 - устройство захвата;
11 - барабан.
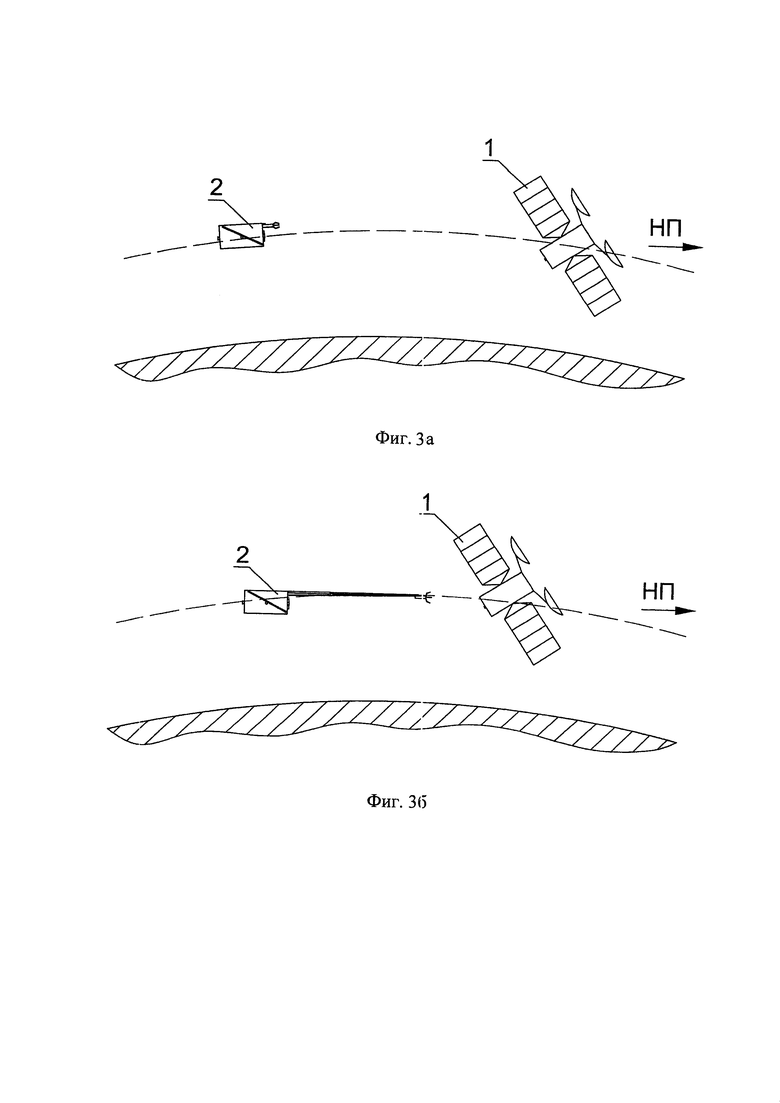
Устройство функционирует следующим образом. КА-эвакуатор (фиг. 3а, поз. 2) выводят на орбиту, на которой расположен предназначенный для увода КА (фиг. 3а, поз. 1). С использованием двигательной установки КА-эвакуатора (фиг. 1, поз. 3) по данным обзорной камеры (фиг. 2, поз. 5) осуществляют сближение КАЭ с КА на расстояние до нескольких сот метров. С помощью дальномера (фиг. 2, поз. 7) определяют относительное расстояние между КАЭ и КА, уравнивают их скорости.
Далее осуществляют наблюдение КА детальной камерой (фиг. 2, поз. 6) для расчета параметров его вращения и нахождения наиболее подходящего места (им может быть каркас солнечной батареи или кронштейн антенны) для захвата устройством захвата КАЭ (фиг. 2, поз. 10). Команды управления могут вырабатываться устройствами бортовой системы управления КАЭ, либо наземными средствами.
С помощью двигательной установки малой тяги (на фиг. не показана) осуществляют необходимую ориентацию КАЭ относительно КА и закручивают КАЭ до минимизации относительной угловой скорости.
Затем осуществляют раскрытие (раскладывание или выдвижение) штанги (фиг. 1, поз. 4). На конце штанги закреплено с помощью электромеханического замка (фиг. 1, поз. 8), например, электромагнитного типа, устройство захвата (фиг. 1, поз. 10), к которому присоединен трос (фиг. 1, поз. 9), разматываемый с барабана (фиг. 1, поз. 11) при раскладывании или выдвижении штанги. При подготовке КАЭ к старту устройство захвата выбирают из набора в зависимости от конструктивных особенностей предназначенного для увода КА, его массы и параметров орбиты. Устройство захвата может быть выполнено в виде защелки или манипулятора, отличающегося бо'льшим количеством степеней свободы.
После полного раскрытия штанги осуществляют сближение КАЭ с КА, при этом штанга ориентирована по направлению к КА (фиг. 3б). Сближение осуществляют с контролем относительного положения и скорости при помощи детальной камеры (фиг. 2, поз. 6) и дальномера (фиг. 2, поз. 7).
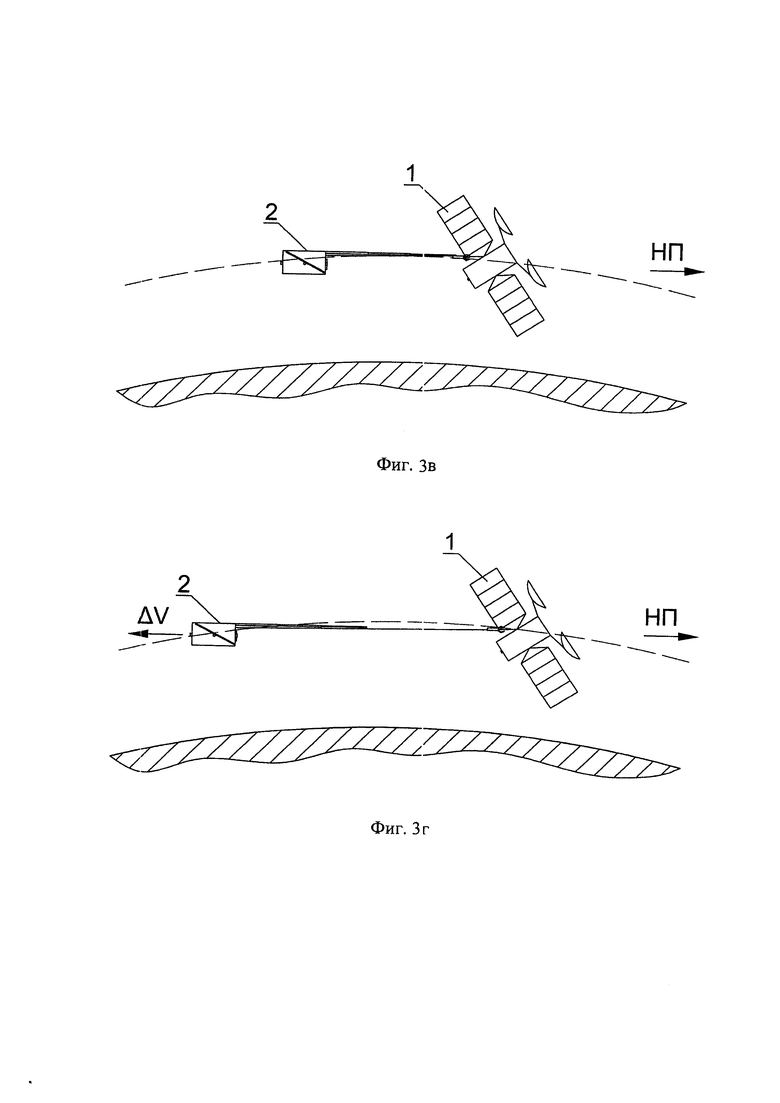
В расчетный момент времени осуществляют захват КА в определенном месте (фиг. 3в). Далее производят раскрытие замка (фиг. 1, поз. 8), и устройство захвата (фиг. 1, поз. 10) отсоединяют от штанги, освобождая трос (фиг. 1, поз. 9).
Выполнение троса с возможностью перемещения, в том числе вращения вдоль штанги обеспечивает защиту КАЭ от динамических ударов и возмущающих моментов со стороны КА после раскрытия замка. Для управления устройством захвата трос выполнен сложным - в составе как силовых кабелей, так энергетических и информационных.
Далее включают двигатели малой тяги КАЭ для обеспечения натяжения троса, который разматывается с барабана на длину, например, вдвое превышающую длину штанги (фиг. 3г). Устройство реверса барабана предупреждает динамические удары и разрыв троса. После этого включают основную двигательную установку (фиг. 1, поз. 3) и уводят связку КАЭ-КА с рабочей орбиты.
С целью унификации и удешевления производства КАЭ основная двигательная установка может быть выполнена в виде набора твердотопливных модулей, количество которых выбирается до запуска КАЭ, при проектировании КАЭ, в зависимости от массы и высоты сводимого с орбиты КА.
Применение изобретения позволяет упростить конструкцию КАЭ и, как результат, повысить экономическую эффективность работ по очистке околоземного космического пространства от антропогенного мусора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБСЛУЖИВАЕМЫЙ НА ОРБИТЕ АВТОМАТИЧЕСКИЙ КОСМИЧЕСКИЙ АППАРАТ | 2015 |
|
RU2595352C1 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| ТЕЛЕСКОПИЧЕСКОЕ СТРЕЛОВОЕ УСТРОЙСТВО | 2021 |
|
RU2772764C1 |
| КОСМИЧЕСКИЙ АППАРАТ ОБСЛУЖИВАНИЯ НА ОРБИТЕ АВТОМАТИЧЕСКОГО КОСМИЧЕСКОГО АППАРАТА И СПОСОБ СТЫКОВКИ КОСМИЧЕСКОГО АППАРАТА ОБСЛУЖИВАНИЯ С НЕИСПРАВНЫМ ВРАЩАЮЩИМСЯ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2601522C1 |
| РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 2016 |
|
RU2643744C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ФУНКЦИОНИРОВАНИЯ НА ОРБИТЕ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2598682C1 |
| СПОСОБ ОЧИСТКИ ОРБИТЫ МНОГОМОДУЛЬНЫМ КОСМИЧЕСКИМ КОМПЛЕКСОМ | 2020 |
|
RU2753393C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2019 |
|
RU2703056C1 |
Изобретение относится к космической технике. Космический аппарат-эвакуатор содержит корпус, устройства системы управления и электропитания, двигательную установку, электромеханическую систему захвата космического аппарата на орбите. На корпусе расположены не менее двух оптических камер, дальномер, раскрываемая штанга, барабан с тросом, закрепленным на барабане с возможностью перемещения вдоль штанги. Свободный конец троса снабжен съемным устройством захвата на орбите космического аппарата в виде защелки или манипулятора. Барабан выполнен с возможностью реверсивного вращения, трос выполнен в виде набора силовых, энергетических и информационных кабелей. Устройство захвата закреплено на штанге электромеханическим замком и выполнено управляемым по кабелю. Техническим результатом изобретения является обеспечение создания космического аппарата-эвакуатора отработавших спутников упрощенной конструкции, позволяющего осуществлять операции захвата крупногабаритных космических объектов. 6 ил.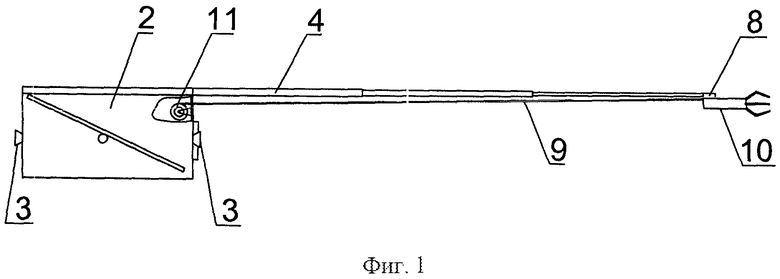
Космический аппарат-эвакуатор, содержащий корпус, устройства системы управления и электропитания, двигательную установку, электромеханическую систему захвата космического аппарата на орбите, отличающийся тем, что на корпусе расположены не менее двух оптических камер, дальномер, раскрываемая штанга, барабан с тросом, закрепленным на барабане с возможностью перемещения вдоль штанги, при этом свободный конец троса снабжен съемным устройством захвата на орбите космического аппарата в виде защелки или манипулятора, барабан выполнен с возможностью реверсивного вращения, а трос выполнен в виде набора силовых, энергетических и информационных кабелей, устройство захвата закреплено на штанге электромеханическим замком и выполнено управляемым по кабелю.
| US 7207525 B2, 24.04.2007 | |||
| EP 3156335 A1, 19.04.2017 | |||
| КОСМИЧЕСКИЙ АППАРАТ ОБСЛУЖИВАНИЯ НА ОРБИТЕ АВТОМАТИЧЕСКОГО КОСМИЧЕСКОГО АППАРАТА И СПОСОБ СТЫКОВКИ КОСМИЧЕСКОГО АППАРАТА ОБСЛУЖИВАНИЯ С НЕИСПРАВНЫМ ВРАЩАЮЩИМСЯ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2601522C1 |
| МНОГОРАЗОВЫЙ КОСМИЧЕСКИЙ АППАРАТ-БУКСИР ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2510359C1 |

