Изобретение относится к космической технике и может найти применение для технического обслуживания (дозаправки, ремонта, модернизации, подготовки к сведению с орбиты) автоматических космических аппаратов с использованием автоматического космического аппарата обслуживания (КАО).
Известны способ и устройство стыковки двух космических кораблей типа «Союз» или «Салют», оснащенных однотипными системами стыковки. Недостатком способа и устройства является невозможность стыковки указанных космических аппаратов в случае потери работоспособности одного из них.
Известны способ и устройство по обеспечению технического обслуживания орбитальной пилотируемой станции (ОПС) «Алмаз» после стыковки с тяжелым транспортным кораблем снабжения (ТКС) комплекса «Алмаз», снабженным запасами топлива и резервными комплектами исправных приборов станции («История развития отечественной пилотируемой космонавтики», том 3 под редакцией И.В. Бармина. Москва, 2015. Издательский дом «Столичная энциклопедия», стр. 284). Недостатком данного технического решения является невозможность проведения восстановительных работ в автоматическом режиме.
Ближайшим аналогом является автоматический космический аппарат ASTRO, предназначенный для автоматической стыковки, перекачки топлива в обоих направлениях, ремонта (в части замены блока аккумуляторных батарей) одиночного космического аппарата NextSat (www.membrana.ru/particle/11455.html, доступно на 25.06.2015 года). Недостатком данного технического решения является невозможность для КАО обслуживания двух и более КА группировки с несколькими видами отказов, в том числе потерявших способность к управлению и заданную ориентацию.
Целью предлагаемого изобретения является создание конструктивного облика КАО, специализированного для стыковки, технического обслуживания, дозаправки и сведения с орбиты нескольких унифицированных по конструкции космических аппаратов с различными видами отказов, вплоть до выхода из строя системы управления, а также способа стыковки с неориентированным (вращающимся) КА.
Указанная цель достигается тем, что в космическом аппарате обслуживания на орбите автоматического космического аппарата, содержащем корпус, двигательную установку (ДУ) с запасом топлива для проведения операций стыковки с КА и маневрирования, в том числе в связке с КА, манипулятор захвата КА, узел стыковки с КА, манипулятор для захвата, перемещения и замены блоков аппаратуры КА и КАО, запас топлива и оборудование для дозаправки КА, запасные блоки аппаратуры для ремонта КА, манипулятор для захвата, перемещения и замены блоков аппаратуры КА и КАО выполнен с возможностью перемещения по корпусу КАО, оконечное устройство манипулятора оснащено устройством диагностики блоков аппаратуры КА, манипулятор захвата КА выполнен на поворотной платформе с возможностью ее вращения с переменной скоростью относительно продольной оси КАО, на корпусе КАО выполнены ложементы для установки блоков аппаратуры КА, предполагаемых к замене.
Дополнительно может быть введено следующее. Оконечное устройство манипулятора для захвата, перемещения и замены блоков аппаратуры КА и КАО выполнено в виде каретки, перемещающейся по направляющей штанге манипулятора и вращающейся относительно продольной оси штанги.
На корпусе КАО установлена аппаратура диагностики параметров закрутки неисправного КА в виде бесконтактного оптико-электронного устройства.
В способе стыковки космического аппарата обслуживания с неисправным вращающимся космическим аппаратом, включающем их сближение, совмещение продольных осей, стыковку с использованием штатных узлов стыковки КА и КАО и двигательной установки КАО, после сближения и совмещения продольной оси КАО с осью вращения КА закручивают поворотную платформу с манипулятором захвата КА до угловой скорости, по величине и направлению совпадающей со скоростью вращения КА, производят захват КА манипулятором для захвата КА, прекращают относительное вращение КА и КАО с помощью тормозного устройства поворотной платформы и двигательной установки КАО, прекращают захват КА, перемещают КАО до сближения и стыковки с использованием штатного узла стыковки.
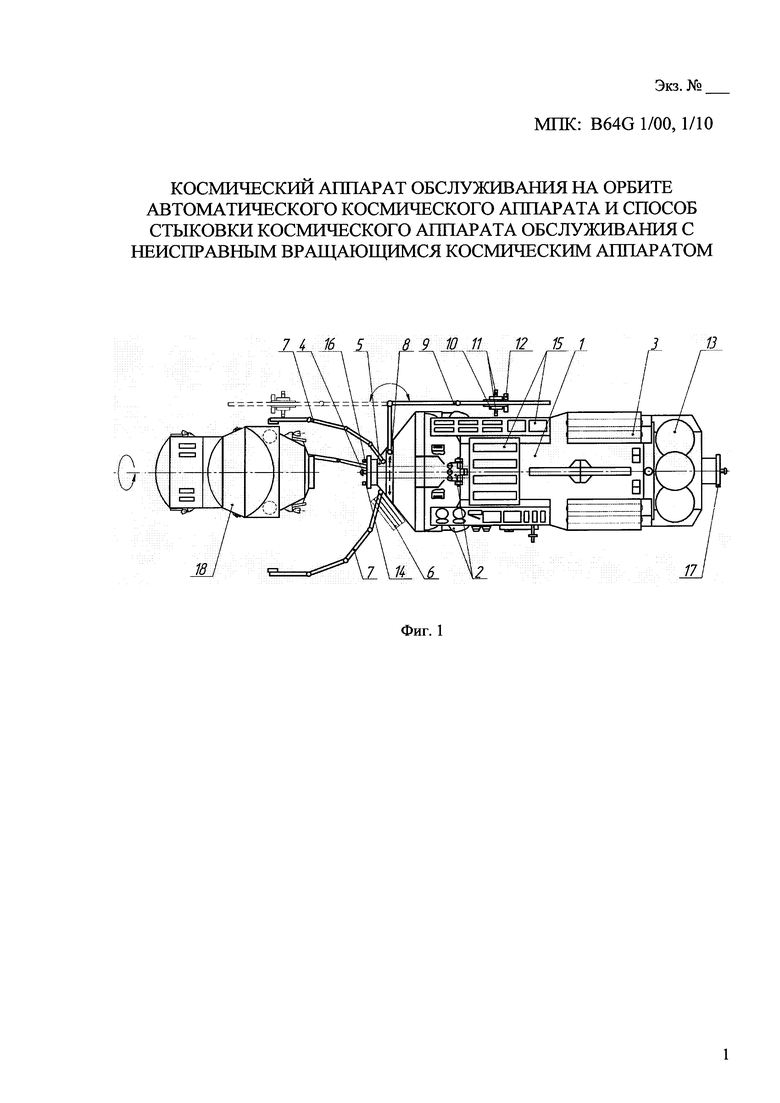
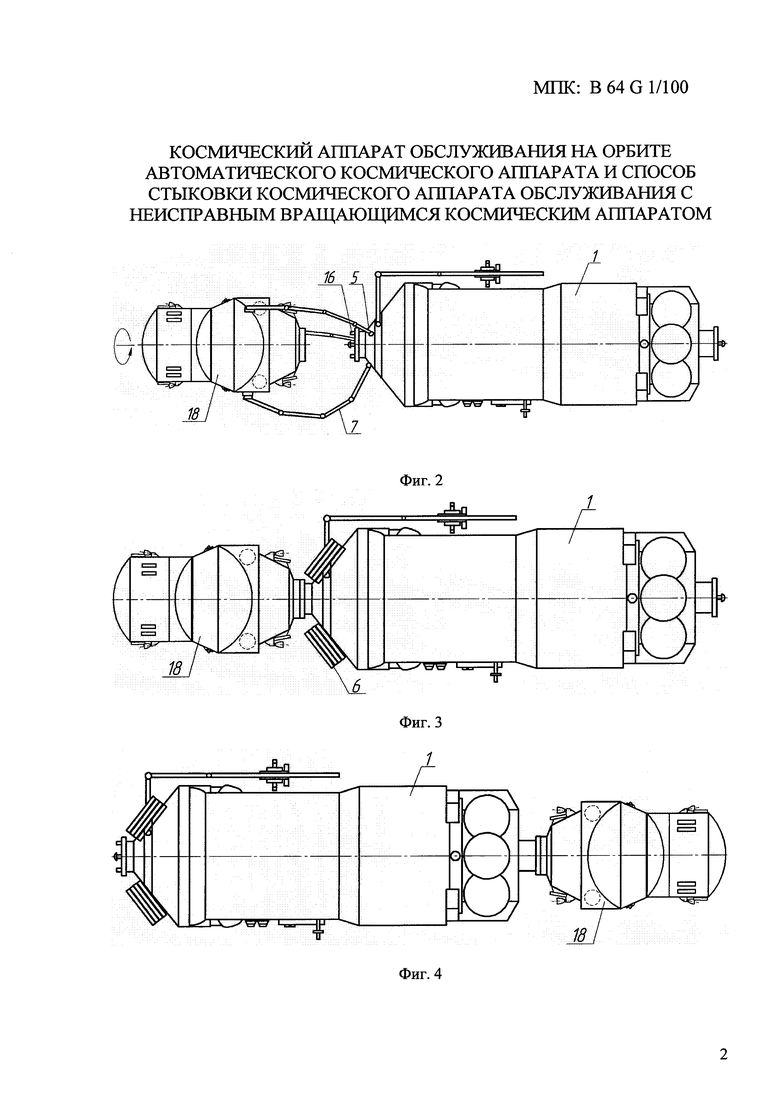
Вариант конструктивно-компоновочной схемы КАО по предлагаемому техническому решению представлен на фиг. 1, схема реализации способа представлена на фиг. 2, 3, 4.
Приняты обозначения:
1 - корпус КАО;
2 - двигательная установка (ДУ);
3 - топливные баки двигательной установки;
4 - штатный узел стыковки;
5 - поворотная платформа;
6 - манипулятор захвата КА в сложенном виде;
7 - манипулятор захвата КА в раскрытом виде;
8 - основание манипулятора для захвата, перемещения и замены блоков аппаратуры КА и КАО;
9 - штанга манипулятора для захвата, перемещения и замены блоков аппаратуры КА;
10 - оконечное устройство манипулятора для захвата, перемещения и замены блоков аппаратуры КА;
11 - захват (часть оконечного устройства);
12 - устройство диагностики блоков аппаратуры КА (часть оконечного устройства);
13 - баки для закачиваемого в КА топлива;
14 - диагностический разъем штатного узла стыковки КАО;
15 - ложементы для установки блоков аппаратуры КА;
16 - оптико-электронное устройство аппаратуры диагностики параметров закрутки КА;
17 - дополнительный узел стыковки;
18 - КА.
Функционирование КАО по предлагаемому техническому решению осуществляется следующим образом.
КАО (поз. 1, фиг. 1) выводят на орбиту, компланарную с орбитой КА (поз. 18, фиг. 1), требующего технического обслуживания или сведения с орбиты, производят предварительное сближение стыкующихся объектов на безопасное для маневров расстояние.
При стыковке с работоспособным КА, с заранее определенной программой технического обслуживания (техническое обслуживание может быть обусловлено недостатком топлива в бортовых баках КА, отказом в блоках базового комплекта бортового оборудования и переходом на резервный комплект), стыковку с использованием узла стыковки (поз. 4, фиг. 1) проводят по расчетной схеме, манипулятор захвата КА не задействован и находится в сложенном виде (поз. 6, фиг. 1).
После стыковки создается единая система координат КА и КАО (единое координационное пространство), что обеспечивает работу манипулятора (поз. 9, фиг. 1) для захвата, перемещения и замены блоков аппаратуры КА.
Оконечное устройство такого манипулятора может быть выполнено в виде каретки (поз. 10, фиг. 1), перемещающейся по штанге манипулятора и вращающейся относительно продольной оси штанги. В этом случае на ней могут быть установлены два захвата, расположенные симметрично относительно продольной оси штанги (поз. 11, фиг. 1). С помощью первого захвата манипулятор извлекает из ячейки-ложемента (поз. 15, фиг. 1) КАО резервный блок аппаратуры КА, поворотом штанги перемещает его к месторасположению аналогичного заменяемого на КА блока. При приближении к заменяемому блоку, с помощью устройства диагностики (выполненному, например, в виде контактного разъема или щупа) производит его контрольную диагностику, далее - извлечение с помощью второго захвата. Далее следует поворот каретки на штанге на 180°, установка на КА резервного блока первым захватом. Затем проводится контрольная диагностика установленного блока и перемещение дефектного блока в ячейку хранения на КАО. При необходимости, операции по замене блоков повторяются.
С учетом возможности расположения подлежащих замене блоков аппаратуры по всей поверхности корпуса КА манипулятор выполнен с подвижным основанием, позволяющим ему перемещаться по корпусу КАО (например, на фиг. 1 манипулятор выполнен с возможностью перемещения - вращения относительно продольной оси КАО).
При стыковке с неработоспособным, потерявшим ориентацию и вращающимся КА операции стыковки осуществляет КАО. Известно, что неуправляемая закрутка со временем приводит к вращению КА относительно оси с минимальным или максимальным моментом инерции.
После предварительного сближения с помощью ДУ КАО и определения (с использованием оптико-электронного устройства КАО, поз. 16, фиг. 1, фиг. 2) направления и величины закрутки КА проводят совмещение продольной оси КАО с осью вращения КА. Далее раскрывают манипулятор захвата КА (поз. 7, фиг. 1, фиг. 2), закручивают поворотную платформу (поз. 5, фиг. 1, фиг. 2) с манипулятором захвата КА до угловой скорости, по величине и направлению совпадающей со скоростью вращения КА, производят захват КА манипулятором для захвата КА (на фиг. 2 манипулятор состоит из трех штанг, развернутых на 60°), прекращают относительное вращение КА и КАО с помощью тормозного устройства (на фиг. не показано) поворотной платформы и двигательной установки КАО. Далее, прекращают захват КА, складывают манипулятор захвата КА (поз. 6, фиг. 1; фиг. 3), перемещают КАО до сближения и стыковки с использованием штатного узла стыковки (поз. 4, фиг. 1; фиг. 3). С помощью диагностического разъема (поз. 15, фиг. 1) штатного узла стыковки определяют состояние КА.
После стыковки вышеуказанным способом вновь создается единое координационное пространство, что обеспечивает, при необходимости, применение манипулятора для замены блоков бортового оборудования, выполнение работ по дозаправке КА по вышеописанной для подлежащего восстановлению КА схеме.
При невозможности восстановления работоспособности КА, после остановки его вращения, диагностики и извлечения работоспособных блоков оборудования и запасов топлива КАО может совершить маневры разворота и размещения КА (фиг. 4) на дополнительном узле стыковки (поз 17, фиг. 1) с последующим использованием штатного узла (поз. 4, фиг. 1) для стыковки и ремонта других КА группировки.
Предлагаемое техническое решение позволяет выполнить расширенную номенклатуру работ по обслуживанию КА с разными видами отказов на орбите и повысить эффективность использования космических аппаратов на орбите.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБСЛУЖИВАЕМЫЙ НА ОРБИТЕ АВТОМАТИЧЕСКИЙ КОСМИЧЕСКИЙ АППАРАТ | 2015 |
|
RU2595352C1 |
| Способ инспекции космических аппаратов в области низких околоземных круговых орбит | 2019 |
|
RU2720758C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ФУНКЦИОНИРОВАНИЯ НА ОРБИТЕ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2015 |
|
RU2598682C1 |
| Способ стыковки космических аппаратов к вращающемуся космическому кораблю и устройство для его реализации | 2020 |
|
RU2788620C2 |
| КОСМИЧЕСКИЙ АППАРАТ-ЭВАКУАТОР | 2018 |
|
RU2686563C1 |
| РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 2016 |
|
RU2643744C2 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| Способ синхронизации угловой скорости вращения активного космического аппарата с пассивным космическим аппаратом при выполнении операции обслуживания | 2017 |
|
RU2750077C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2019 |
|
RU2703056C1 |
| Космический аппарат для очистки околоземного космического пространства от космического мусора | 2022 |
|
RU2784740C1 |
Группа изобретений относится к обслуживанию (в т.ч. дозаправке) автоматических космических аппаратов (КА) на орбите. КА обслуживания (КАО) содержит узел стыковки с КА, двигательную установку, манипулятор для захвата КА, манипулятор захвата, перемещения и замены (МПЗ) блоков аппаратуры КА и КАО, средства дозаправки КА, запасные блоки аппаратуры для ремонта КА. МПЗ выполнен перемещаемым по корпусу КАО, а его оконечность оснащена устройством диагностики блоков аппаратуры КА. Манипулятор захвата КА выполнен на поворотной платформе. На корпусе КАО может быть. размещена аппаратура диагностики параметров закрутки неисправного КА. При стыковке КАО с вращающимся обслуживаемым КА совмещают их продольные оси. Закручивают поворотную платформу с манипулятором захвата КА до угловой скорости вращения КА, производят захват КА, тормозят относительное вращение КА и КАО средствами платформы и двигательной установки КАО. Прекращают захват КА и перемещают КАО до сближения и стыковки с использованием штатного узла стыковки. Технический результат группы изобретений состоит в расширении возможностей по обслуживанию КА с разными видами отказов и повышении эффективности группировки КА на орбите. 2 н. и 2 з.п. ф-лы, 4 ил.
1. Космический аппарат обслуживания (КАО) на орбите автоматического космического аппарата (КА), содержащий корпус, двигательную установку с запасом топлива для проведения операций стыковки с КА и маневрирования, в том числе в связке с КА, манипулятор захвата КА, узел стыковки с КА, манипулятор для захвата, перемещения и замены блоков аппаратуры КА и КАО, запас топлива и оборудование для дозаправки КА, запасные блоки аппаратуры для ремонта КА, отличающийся тем, что манипулятор для захвата, перемещения и замены блоков аппаратуры КА и КАО выполнен с возможностью перемещения по корпусу КАО, оконечное устройство манипулятора оснащено устройством диагностики блоков аппаратуры КА, манипулятор захвата КА выполнен на поворотной платформе с возможностью ее вращения с переменной скоростью относительно продольной оси КАО, на корпусе КАО выполнены ложементы для установки блоков аппаратуры КА.
2. Космический аппарат обслуживания по п.1, отличающийся тем, что оконечное устройство манипулятора для захвата, перемещения и замены блоков аппаратуры КА и КАО выполнено в виде каретки, перемещающейся по штанге манипулятора и вращающейся относительно продольной оси штанги.
3. Космический аппарат обслуживания по п.1, отличающийся тем, что на корпусе КАО установлена аппаратура диагностики параметров закрутки неисправного КА в виде бесконтактного оптико-электронного устройства.
4. Способ стыковки космического аппарата обслуживания (КАО) с неисправным вращающимся космическим аппаратом (КА), включающий их сближение, совмещение продольных осей, стыковку с использованием штатных узлов стыковки КА и КАО и двигательной установки КАО, отличающийся тем, что после сближения и совмещения продольной оси КАО с осью вращения КА закручивают поворотную платформу с манипулятором захвата КА до угловой скорости, по величине и направлению совпадающей со скоростью вращения КА, производят захват КА манипулятором для захвата КА, прекращают относительное вращение КА и КАО с помощью тормозного устройства поворотной платформы и двигательной установки КАО, прекращают захват КА, перемещают КАО до сближения и стыковки с использованием штатного узла стыковки.
| US 4395006 A, 26.07.1983 | |||
| US 4664344 A, 12.05.1987;US 7823837 B2, 02.11.2010;RU 2116942 C1, 10.08.1998;RU 2181094 C1, 10.04.2002;RU 2072951 C1, 10.02.1997. |

