Изобретение относится к космической технике и может быть использовано для уборки космического мусора.
По состоянию на 2012 год на орбитах вокруг Земли было зафиксировано 16000 объектов размером более 10 см (10 см - размер космических объектов, надежно сопровождаемый наземными средствами наблюдения). В 2015 г. общее количество находящихся в космическом пространстве каталогизированных космических объектов техногенного происхождения составило 17250 единиц, в 2017 г. их было около 29000. Количество фрагментов меньшего размера может быть оценено лишь путем математического моделирования. Современная оценка ЕКА составляет примерно 750 тысяч объектов размером свыше 1 см и свыше 166 млн размером более 1 мм. Все они представляют серьезную опасность для работы действующих спутников и пилотируемых кораблей. Фрагмент размерами не более скрепки, идущий наперерез международной космической станции (МКС), может не только вывести из строя работающее оборудование, но и привести к разгерметизации жилых отсеков.
На сегодняшний день единственным возможным способом избежать столкновения с каталогизированным космическим мусором (КМ) является маневр уклонения, который влечет за собой непредусмотренные топливные затраты с соответствующим уменьшением срока функционирования космических аппаратов (КА), возможный срыв программы полета и вытекающие из этого проблемы. Однако, уклонение автоматических КА от столкновения с космическим мусором возможно для тех из них, которые оснащены бортовыми корректирующими двигательными установками.
В этой ситуации одним из важнейших направлений обеспечения безопасности космических полетов является разработка способов и средств защиты космических аппаратов от воздействия КМ, разработка и внедрение мероприятий, направленных на снижение засоренности околоземного космического пространства (ОКП).
Известен аналог - многоразовый космический аппарат-буксир для уборки крупногабаритного «космического мусора» (патент РФ 2536297, опубликованный 20.12.2014), содержащий корпус, приборный отсек с системой управления, двигательную установку, солнечные батареи, головку самонаведения, несколько устройств дистанционного захвата «космического мусора», и что каждое устройство захвата выполнено в виде размещенного в стакане космического копья с оперением и поршнем и установленного на корпусе космического аппарата-буксира, при этом в донной части стакана размещен пороховой двигатель, снабженный двухмостиковым пиропатроном его поджига, а снаружи стакана устройства захвата установлен пневматический клапан для подачи сжатого газа внутрь этого стакана.
Признаки аналога, совпадающие с признаками изобретения: космический аппарат для уборки космического мусора, состоящий из корпуса, маршевой двигательной установки, системы ориентации и причаливания с двигательной установкой малой тяги, системы энергоснабжения на основе пакетов солнечных батарей, системы управления полетом.
Известен способ увода с рабочей орбиты космических аппаратов, отработавших свой срок, и их уничтожения предложен инженерами американской корпорации Global Aerospace. По их расчетам оптимальным решением может стать крупный воздушный шар, закрепленный в сложенном состоянии на борту спутника. Когда спутник по каким-либо причинам прекращает активное функционирование шар должен наполниться гелием (либо другим газом). Большая оболочка создаст измеримое аэродинамическое сопротивление даже в разреженных остатках атмосферы. Такой шар диаметром 37 метров всего за год в состоянии увести спутник массой 1,2 тонны с рабочей орбиты высотой порядка 800 километров, и обеспечить его сгорание в атмосфере. В естественных условиях процесс торможения спутника может занять не одно столетие.
Основанный на подобных принципах представляет интерес солнечный уборщик космического мусора, разработанный британскими инженерами.
Небольшой солнечный парус мог бы не только предоставлять малым спутникам даровую тягу во время выполнения основной миссии, но и сводить с орбиты аппараты, отработавшие свой ресурс. Проверить эту идею на практике призван наноспутник CubeSail. Основной разработчик аппарата компания Surrey Satellite Technology, партнерами по проекту являются космический центр университета Суррея (Surrey Space Centre), а также европейский аэрокосмический гигант EADS Astrium, который предоставил финансирование. КА CubeSail должен выйти на полярную орбиту высотой 700 километров, после чего на нем должен быть развернут квадратный парус из тонкой полимерной пленки площадью 25 квадратных метров. Парус способен смещаться относительно спутника в двух направлениях. Это даст возможность изменять взаимное положение центра масс аппарата и паруса. Будут задействованы маленькие магниты, которые будут взаимодействовать с магнитным полем Земли.
В начале миссии CubeSail парус будет использован как движитель, способный изменять параметры орбиты аппарата. По окончании функционирования спутника управление парусом будет настроено так, чтобы он тормозил спутник. Помимо «солнечной тяги» этому должно способствовать относительно большое сопротивление атмосферы, следы которой присутствуют даже на таких высотах.
Авторы технологии предполагают, что подобные устройства могут стать стандартным оснащением новых спутников массой до 500 кг. Они бы развертывали парус и работали как тормозная система в конце срока службы, уменьшая тем самым количество мусора в околоземном пространстве.
В Швейцарском федеральном технологическом институте в городе Лозанна разрабатывается проект «робота-уборщика» CleanSpaceOne (http://www.membrana.ru/particles/tag/542). Это небольшой спутник, который должен отыскать фрагмент космического мусора, захватить его и затем вместе с ним взять курс в плотные слои атмосферы Земли, где они оба должны сгореть. CleanSpaceOne планировалось запустить в 2018 году.
Однако многие ученые скептически относятся к данному проекту. Это связано с тем, что разработка спутника «CleanSpaceOne» обойдется почти в 8 миллионов евро, а с его помощью удастся утилизировать всего один фрагмент космического мусора - списанный наноспутник SwissCube.
С другой стороны, миссии, подобные «CleanSpace One», важны и правильны. С их помощью можно будет уничтожить хотя бы наиболее крупные обломки, но решить всю проблему космического мусора не представляется возможным. Для этих целей необходимы совершенно новые идеи и другие технические решения.
Компания Airbus проводит испытания гарпуна, разработанного специально для вылавливания вышедших из строя искусственных спутников и космического мусора (см. «AIRBUS начала испытания космического гарпуна для сбора мусора на орбите Земли», ТАСС, Москва, 16 марта 2018).
По задумке конструкторов, "снарядом", представляющим из себя металлический гарпун длиной один метр, оснастят специальный космический аппарат, который будет способен догнать спутник. После сближения с целью гарпун, прикрепленный к своему носителю крепким тросом, должен будет эту цель "поймать" и зафиксировать. Завершается весь процесс тем, что аппарат утягивает за собой спутник или какой-либо другой космический мусор обратно в атмосферу, где вместе с ними сгорает.
В настоящее время разработчики тестируют пневматический гарпун в британском городе Стивенидж в графстве Хартфордшир, выстреливая им в металлические листы с сотовым наполнителем толщиной в 3 см (прочный материал, применяющийся при строительстве космических летательных аппаратов). "Наш гарпун проходит сквозь эти листы, как горячий нож сквозь масло", - рассказал Би-би-си один из испытателей Алестер Уэйман. По его словам, у гарпуна есть особые автоматизированные шипы, которые раскрываются при попадании в цель и помогают ее крепко зафиксировать.
Разработчики надеются испытать миниатюрную версию своего изобретения в космосе. Для этого они собираются отправить мини-гарпун на орбиту вместе с другим аппаратом, также разработанным компанией Airbus для борьбы с космическим мусором, под названием RemoveDebris. Этот аппарат выполнен в форме куба, размером со стиральную машину, который оснащен специальными механическими инструментами для поиска и "выталкивания с орбиты" космического мусора, а также вышедших из строя искусственных спутников.
RemoveDebris планируется отправить на МКС, где его соберут космонавты. Затем аппарат вместе с гарпуном опробуют в открытом космосе. После испытаний RemoveDebris войдет в земную атмосферу и полностью сгорит. По словам ученых, это делается для того, чтобы их устройство само не превратилось в космический мусор.
Создатели надеются на то, что их проект стоимостью в  15 млн ($20 млн) положит начало более масштабной деятельности по очистке земной орбиты от космического мусора.
15 млн ($20 млн) положит начало более масштабной деятельности по очистке земной орбиты от космического мусора.
По результатам патентного поиска представляется целесообразным отметить еще 5 интересных технических решений, которые могут решать проблему космического загрязнения орбиты.
1. Миссия DeOrbit, которая была предложена в начале 2014 года. Предлагается вести поиск мусора на полярной орбите на высоте от 800 км до 1000 км. Европейское космическое агентство разрабатывает несколько видов «механизмов захвата», чтобы подобрать мусор, например, сети, гарпуны, роботизированные конечности и щупальца.
2. Японское аэрокосмическое агентство предлагает использовать электродинамический невод, который мог бы замедлить скорость спутников или космических обломков. Замедление скорости позволило бы спутникам снизить орбиту и сгореть в атмосфере Земли.
3. Способ, который назвали Space Debris Elimination (воздушные взрывы), будет запускать спутники на низкую орбиту с помощью воздушных взрывов в атмосфере. По замыслу воздушный шар или самолет, способный летать в разреженной атмосфере, которые будут создавать воздушные взрывы, достаточные для того, чтобы сбить с пути низкоорбитальный космический мусор.
4. Сеть наноспутников, связанных электропроводной сетью, длиной в 3 км, может сбивать спутники вниз по мере прохождения через магнитное поле Земли (поскольку возникает напряжение). Electro Dynamic Debris Eliminator, работающий на солнечных батареях и предложенный компанией Star Technology и Research (штаб-квартира в Маунт-Плезант, Южная Каролина), может за десять лет избавить от всех крупных кусков мусора на низкой земной орбите. Идея потребовала значительных финансовых средств и не была реализована.
5. План, запатентованный компанией Launch space Technologies, подразумевает отправку на экваториальную орбиту специальных «комбайнов» размером с футбольное поле, именуемых Debris Collection Units (DCU). Именно эти «блоки сбора мусора» будут разбирать «орбитальную помойку». Аппараты со сменными сетчатыми ударными панелями (Debris Impact Pads) компания предлагает выводить на наиболее популярные орбиты. Они будут собирать мелкие обломки, избегая при этом столкновения с находящимися там спутниками и фрагментами большого размера. План также предусматривает создание обслуживающих спутников, задачей которых станет перемещение между орбитами самих «комбайнов». Предлагаемая компанией группировка может быть дополнена орбитальной станцией по обслуживанию и восстановлению (Orbital Servicing and Remanufacturing Facility), где будет происходить ремонт или переработка сменных ударных панелей в какие-либо иные изделия. Технический директор Launchspace Tech nologies признает, что вся система очистки орбиты от космического мусора обойдется в «десятки миллиардов долларов», добавляя при этом, что бездействие и потеря доступа к ключевым орбитам «будет стоить триллионы».
КА RemoveDebris разработки компании Airbus и «робот-уборщик» CleanSpaceOne являются аналогами предлагаемого изобретения.
Принципиальным недостатком этих аппаратов является их одноразовое использование (один КА-уборщик - один объект КМ).
Прототипом изобретения является многоразовый космический аппарат-буксир для уборки космического мусора (патент РФ 2510359, опубликованный 27.03.2014). Это многоразовый космический аппарат-буксир для уборки космического мусора, содержащий корпус, приборный отсек с системой управления, двигательную установку, солнечные батареи, головку самонаведения, несколько устройств дистанционного захвата космического мусора, отличающийся тем, что основу каждого из устройств захвата составляет космический гарпун, который вместе с оперением и пороховым двигателем размещен в стакане, установленном на съемной крышке контейнера, при этом пороховой двигатель контактирует с 2-мостиковым пиропатроном, а в донной части космического гарпуна закреплен трос, основная часть которого намотана на барабан, устанавливаемый внутри контейнера, снаружи которого соосно с барабаном установлен электропривод барабана и кожух для защиты космического гарпуна и оперения от механических воздействий на всех этапах эксплуатации многоразового космического аппарата - буксира.
Признаки прототипа совпадающие с признаками изобретения: космический аппарат для уборки космического мусора, состоящий из негерметичного корпуса, маршевого жидкостного ракетного двигателя, системы ориентации и причаливания с двигательной установкой малой тяги, системы энергоснабжения на основе пакетов солнечных батарей, системы управления полетом.
Аналог и прототип имеют ряд существенных недостатков, снижающих эффективность их использования для очистки космического пространства от КМ.
На мой взгляд, наиболее важным недостатком является то, что после захвата и обеспечения контакта КА-буксира и КМ баллистический маневр по переводу связки (КА-буксир+ КМ) на траекторию полета к Земле или на орбиту захоронения осуществляется с использованием маршевой двигательной установки КА-буксира. При этом запасы компонентов топлива на борту КА-буксира будут резко сокращаться, что существенно ограничивает активный срок существования КА-буксира. Повышенный расход компонентов топлива обусловлен тем, что на межорбитальный переход связки (КА-буксир+ КМ) не эффективно расходуется топливо для перемещения собственно самого КА-буксира.
Кроме того, вызывает сомнение возможность использования аналога и прототипа для захвата КМ, беспорядочно вращающегося относительно собственного центра масс. Трос, закрепленный на гарпуне, после захвата беспорядочно вращающегося КМ наматывается на КМ и приводит к неконтролируемому движению КА-буксира. В результате происходит столкновение КМ с КА-буксиром и выход из строя последнего, возможно, с появлением дополнительных фрагментов КМ.
Вызывает сомнение также возможность автономного функционирования КА-буксира при выполнении операций сближения с КМ, его захвата с помощью гарпуна, формирования полетного задания связки (КА-буксир+ КМ) при не известной массе КМ на траекторию полета к Земле или на орбиту захоронения. Исходя из описания прототипа на борту КА-буксира для этих целей имеется только «головка самонаведения».
Задачей изобретения является повышение эффективности утилизации космического мусора.
Техническим результатом изобретения является обеспечение утилизации наблюдаемого наземными средствами техногенного космического мусора произвольных геометрических размеров, произвольной массы, беспорядочно вращающегося относительно собственного центра масс.
Задача изобретения достигается тем, что космический аппарат для уборки космического мусора, состоит из негерметичного корпуса, маршевого жидкостного ракетного двигателя, системы ориентации и причаливания с двигательной установкой малой тяги, системы энергоснабжения на основе пакетов солнечных батарей, системы управления полетом, и от прототипа отличается тем, что он оснащается бортовым спецкомплексом, включающим в свой состав робот-манипулятор для захвата и удержания космического мусора, контейнер с блоком ракетных двигателей твердого топлива, робот-манипулятор для выгрузки из контейнера ракетных двигателей твердого топлива и закрепления их на поверхности космического мусора, телескопический демпфер-успокоитель космического мусора с набором упруго-гибких волокон, расположенных на выдвигаемой части демпфера-успокоителя, цифровую телевизионную радиолинию, включающую блоки видеокамер, антенны передачи данных и получения команд от центра управления полетом, систему управления бортовым спецкомплексом, включая функции выдачи команд для обеспечения требуемой пространственной ориентации космического мусора и включения ракетных двигателей твердого топлива.
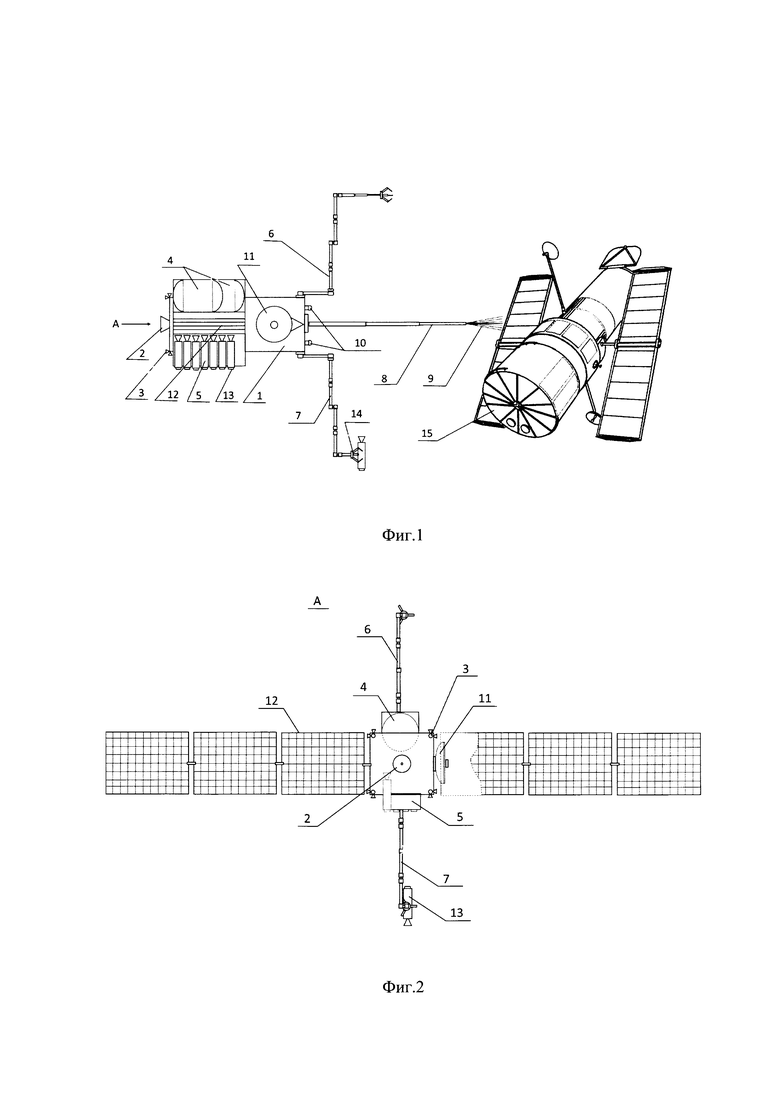
Общий вид КА для уборки космического мусора и основные этапы его взаимодействия с КМ представлены на Фиг. 1-3.
На Фиг. 1 представлен КА для уборки космического мусора в режиме подготовке к захвату свободно вращающегося КМ.
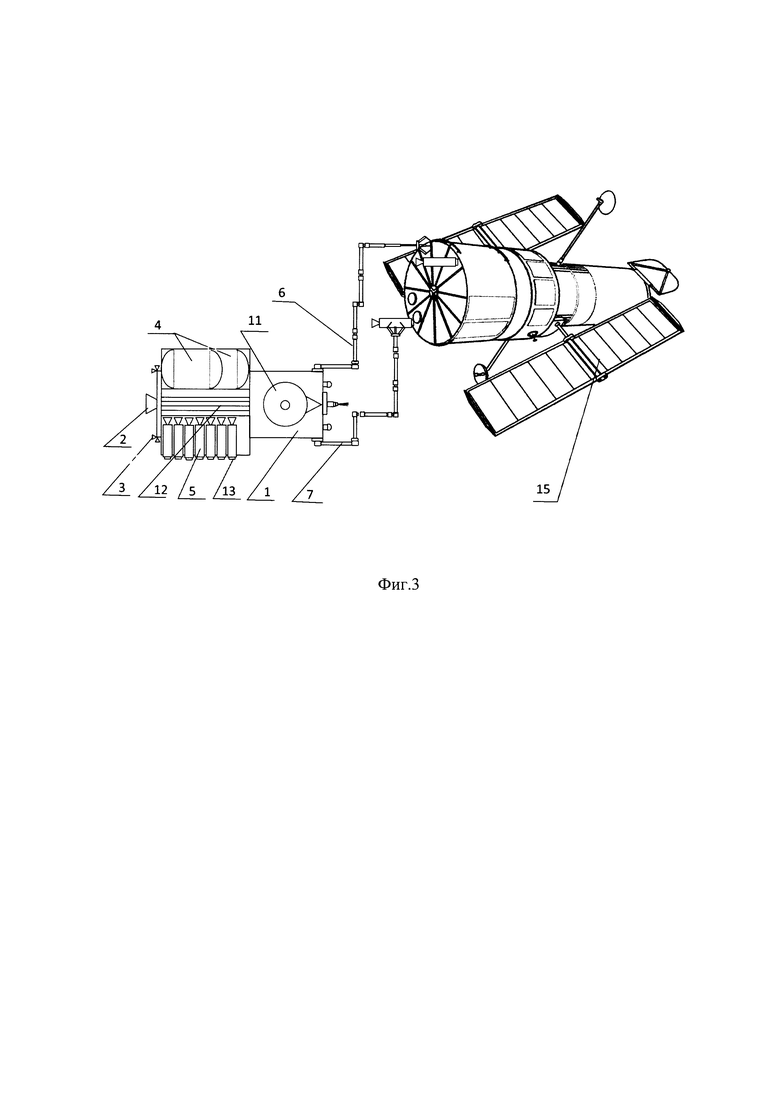
На Фиг. 2 представлен вид КА со стороны маршевого жидкостного ракетного двигателя с раскрытыми блоками солнечных батарей.
На Фиг. 3 представлен КА для уборки КМ в состоянии удержания КМ.
На фигурах обозначены следующие элементы:
1 - корпус КА;
2 - сопло маршевого жидкостного ракетного двигателя;
3 - сопла двигательной установкой малой тяги системы ориентации и причаливания;
4 - топливные баки маршевого жидкостного ракетного двигателя и двигательной установкой малой тяги;
5 - контейнер с блоком ракетных двигателей твердого топлива;
6 - робот-манипулятор для захвата и удержания КМ;
7 - робот-манипулятор для выгрузки из контейнера ракетных двигателей твердого топлива и закрепления их на поверхности КМ;
8 - телескопический демпфер-успокоитель;
9 - набор упруго-гибких волокон;
10 - блоки видеокамер;
11 - антенна бортового спецкомплекса;
12 - панели солнечных батарей;
13 - ракетный двигатель твердого топлива;
14 - устройство захвата и удержания ракетных двигателей твердого топлива (аналогичное устройство захвата и удержания КМ установлено на роботе-манипуляторе 6);
15 - космический мусор.
На Фиг. 1 представлен КА для уборки космического мусора в режиме подготовке к захвату свободно вращающегося КМ с выдвинутым телескопическим демпфером-успокоителем и набором упруго-гибких волокон в рабочем положении.
На Фиг. 2 представлен вид КА со стороны маршевого жидкостного ракетного двигателя с раскрытыми блоками солнечных батарей в состоянии без ориентации на Солнце после раскрытия.
На Фиг. 3 представлен КА для уборки КМ в состоянии удержания КМ устройством 14, расположенным на роботе-манипуляторе 6 и установки ракетных двигателей твердого топлива 13 на поверхность КМ с использованием робота-манипулятора 7 и устройства захвата и удержания 14. Закрепление ракетных двигателей (требуемое количество определяется Центром управления полетом КА с учетом массы КМ и значения импульса характеристической скорости, необходимого для перевода КМ на траекторию спуска в атмосферу Земли, либо на орбиту захоронения) на поверхности КМ может осуществляться различными способами. Кроме механических соединений к числу наиболее отработанных и используемых на МКС относится применение двухкомпонентных полимерных клеев. На Фиг. 3 показан телескопический демпфер-успокоитель в сложенном (транспортном) положении.
КА для уборки КМ функционирует следующим образом.
КА для уборки КМ выводится ракетой-носителем на орбиту наблюдаемого КМ. После выведения все бортовые и служебные системы КА (бортовой спецкомплекс) приводятся в рабочее состояние, цифровая телевизионная радиолиния получает и транслирует команды Центра управления полетом (ЦУП) КА.
По командам ЦУП КА осуществляет сближение с КМ, при необходимости обеспечивает гашение скорости вращения КМ относительно собственного центра масс. Для этих целей телескопический демпфер-успокоитель (8) с набором упруго-гибких волокон (9) выдвигается в сторону КМ (15) таким образом, чтобы обеспечить касание последних (гибких волокон с КМ). Взаимодействие осуществляется до полного успокоения КМ (устранения вращения КМ). Сила взаимодействия гибких волокон с КМ осуществляется варьированием длины телескопического демпфера-успокоителя (8) и задействованием двигателей малой тяги системы ориентации и причаливания (3). Контроль взаимодействия КА с КМ осуществляется с использованием видеокамер (10).
После устранения беспорядочного вращения КМ телескопический демпфер-успокоитель (8) с набором упруго-гибких волокон (9) приводится в транспортное положение, как показано на Фиг. 3.
По командам ЦУП осуществляется захват КМ. Для этих целей используется робот-манипулятор (6) и устройство захвата (14). Контроль выполнения операции захвата КМ выполняется с использованием видеокамер (10).
Следующим этапом осуществляется установка ракетных двигателей твердого топлива на КМ. Робот-манипулятор (6) и устройство захвата (14) обеспечивают захват одного двигателя (13), извлечение его из контейнера (5) и фиксацию на поверхности КМ. Количество двигателей (13), устанавливаемых на КМ определяется ЦУП с учетом массы КМ и значения импульса характеристической скорости, необходимого для перевода КМ на траекторию спуска в атмосферу Земли, либо на орбиту захоронения. Двигатели (13) крепятся на КМ с использованием двухкомпонентного полимерного клея, емкости с фракциями которого установлены на торцевой части двигателя (13). Смешение фракций клея и его нанесение на поверхность КМ осуществляется по команде ЦУП, транслируемой с использованием цифровой телевизионной радиолинии КА.
После установки двигателей (13) на поверхности КМ с помощью двигателей малой тяги (3) осуществляется пространственная ориентация КМ для обеспечения требуемого направления вектора тяги двигателей (13) для перевода КМ на траекторию спуска в атмосферу Земли, либо на орбиту захоронения.
В дальнейшем устройство захвата и удержания КМ (14) переводится в положение освобождения от КМ, роботы-манипуляторы (6) и (7) отводятся в сторону от КМ, КА с помощью двигателей малой тяги (3) переводится на безопасное расстояние от КМ.
По команде ЦУП, транслируемой с использованием цифровой телевизионной радиолинии КА, осуществляется запуск ракетных двигателей твердого топлива, обеспечивающих увод КМ на траекторию спуска в атмосферу Земли, либо на орбиту захоронения.
По команде ЦУП КА переводится на орбиту другого наблюдаемого наземными средствами КМ.
Основными расходными материалами, влияющими на многоразовость использования КА и, соответственно, на его эффективность, являются ракетные двигатели твердого топлива (13) и компоненты ракетного топлива для маршевого двигателя (2). В этой связи контейнер (5) с комплектом двигателей (13) и баки компонентов ракетного топлива (4) выполнены сменными с возможностью их замены в условиях орбитального полета. Их доставка к КА осуществляется специальным сервисным КА, либо межорбитальным буксиром. Отстыковка контейнера с израсходованным комплектом двигателей (13) от КА и установка нового контейнера (5) выполняется роботом-манипулятором (6) и устройством захвата (14). Аналогичные операции по замене топливных баков (4) выполняется роботом-манипулятором (7) и устройством захвата (14). Подобные операции отработаны и выполняются на МКС дистанционно управляемым космическим роботом-манипулятором ERA (European Robotic Arm), созданным для сборочных работ и обслуживания российского сегмента Международной космической станции. Операции сервисного обслуживания выполняются по командам ЦУП.
Таким образом, задача изобретения решена. Предлагаемый КА решает задачу утилизации наблюдаемого наземными средствами техногенного космического мусора произвольных геометрических размеров, произвольной массы, беспорядочно вращающегося относительно собственного центра масс.
Кроме того, существенно повышается эффективность применения предложенного КА за счет того, что для изменения орбиты КМ используются не компоненты маршевого жидкостного ракетного двигателя, а специальные ракетные двигатели твердого топлива, расположенные в съемном контейнере на борту КА, а также за счет повышения многоразовости КА путем его комплектации заменяемыми топливными баками маршевого двигателя и восполняемым комплектом ракетных двигателей для изменения орбит КМ.
Изобретение относится к космической технике, а более конкретно к оборудованию для уборки космического мусора. Космический аппарат для уборки космического мусора состоит из негерметичного корпуса, маршевого жидкостного ракетного двигателя, системы ориентации и причаливания с двигательной установкой малой тяги, системы энергоснабжения и системы управления полетом. Аппарат оснащен бортовым спецкомплексом, включающим робот-манипулятор для захвата и удержания космического мусора, контейнер с блоком ракетных двигателей твердого топлива, робот-манипулятор для выгрузки из контейнера ракетных двигателей твердого топлива и закрепления их на поверхности космического мусора. Кроме того, имеется телескопический демпфер-успокоитель космического мусора с набором упруго-гибких волокон, расположенных на выдвигаемой части демпфера-успокоителя, цифровая телевизионная радиолиния, включающая блоки видеокамер, антенны передачи данных и получения команд от центра управления полетом, систему управления бортовым спецкомплексом. Достигается повышение эффективности космического аппарата при уборке космического мусора. 2 з.п. ф-лы, 3 ил.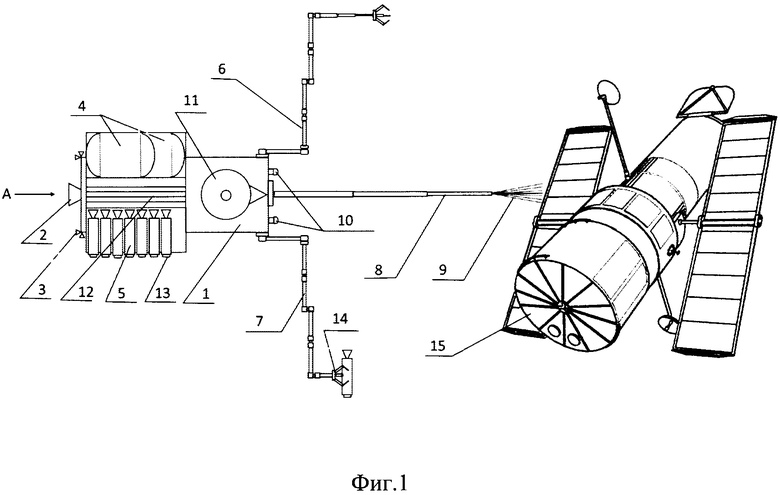
1. Космический аппарат для уборки космического мусора, состоящий из негерметичного корпуса, маршевого жидкостного ракетного двигателя, системы ориентации и причаливания с двигательной установкой малой тяги, системы энергоснабжения на основе пакетов солнечных батарей, системы управления полетом, отличающийся тем, что он оснащается бортовым спецкомплексом, включающим в свой состав робот-манипулятор для захвата и удержания космического мусора, контейнер с блоком ракетных двигателей твердого топлива, робот-манипулятор для выгрузки из контейнера ракетных двигателей твердого топлива и закрепления их на поверхности космического мусора, телескопический демпфер-успокоитель космического мусора с набором упруго-гибких волокон, расположенных на выдвигаемой части демпфера-успокоителя, цифровую телевизионную радиолинию, включающую блоки видеокамер, антенны передачи данных и получения команд от центра управления полетом, систему управления бортовым спецкомплексом, включая функции выдачи команд для обеспечения требуемой пространственной ориентации космического мусора и включения ракетных двигателей твердого топлива.
2. Космический аппарат для уборки космического мусора по п. 1, отличающийся тем, что топливные баки маршевого жидкостного ракетного двигателя выполнены в съемном исполнении, замена которых осуществляется на орбите бортовым роботом-манипулятором с привлечением специального транспортного космического аппарата обслуживания.
3. Космический аппарат для уборки космического мусора по п. 1, отличающийся тем, что контейнер с ракетными двигателями твердого топлива выполнен в съемном исполнении, замена которого осуществляется на орбите бортовым роботом-манипулятором с привлечением специального транспортного космического аппарата обслуживания.
| МНОГОРАЗОВЫЙ КОСМИЧЕСКИЙ АППАРАТ-БУКСИР ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2510359C1 |
| US 6419191 B1, 16.07.2002 | |||
| WO 2016052518 A1, 07.04.2016. | |||

