Область техники
[001] Настоящее изобретение относится к способу регулирования давления и/или расхода текучей среды и, более конкретно, к способу и устройству для регулирования давления и/или расхода текучей среды, основанному на множественных режимах управления.
УРОВЕНЬ ТЕХНИКИ
[002] В нефтяной и газовой промышленности становится все более распространенным нагнетание воды и/или пара в пласты (такие как, например, нефтяной пласт). Эти типы нагнетания могут быть использованы для поддержания или регулирования давления в пласте и/или для подачи тепла в пласт (например, для изменения температуры в пласте). Вода, нагнетаемая в пласт, может замещать извлеченную массу (например, нефть) и, таким образом, влиять на давление в пласте. Пар, нагнетаемый в пласт, может как замещать извлеченную массу, так и вызывать изменение температуры.
[003] Операторы скважин часто используют программируемые логические контроллеры (programmable logic controllers, PLC) для управления нагнетанием воды и/или пара в пласт. Однако PLC для работы нуждаются в энергии переменного тока (Alternating Current, AC), потребность в котором является уникальной по сравнению с потребностями в энергии других компонентов на площадке скважины. То есть, отличающиеся от PLC, типичные компоненты системы управления технологическим процессом на площадке не требуют энергии переменного тока и, чтобы использовать PLC для управления закачиванием воды и/или пара (например, в устье скважины), операторы должны тратить большие суммы денег для обеспечения того, чтобы обеспечить площадки скважин энергией переменного тока.
[004] Более того, некоторые крупные операторы нефтедобычи по меньшей мере учитывают классификацию источников энергии переменного тока (например, 120 В переменного тока), как «опасные». Если эти операторы выполняют такую классификацию, только должным образом приспособленные и лицензированные электрики будут иметь возможность обслуживания PLC на площадках скважин, и эти требования будут приводить к дополнительным затратам, связанным с использованием PLC для управления нагнетанием воды/пара. Использование PLC может, кроме того, приводить к рассогласованию между процессами нагнетания. Поскольку каждое PLC является отдельно программируемым, одно PLC, управляющее нагнетанием в первом устье скважины, может работать иначе, чем другое PLC, управляющее нагнетанием во втором устье скважины. В таком случае операторы вынуждены отправлять программистов PLC для выполнения изменений в PLC на каждой из площадок.
Раскрытие СУЩНОСТИ изобретения
[005] В одном варианте осуществления способ управления расходом и/или давлением нагнетаемой текучей среды включает в себя прием измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды, и определение режима управления для управления расходом и/или давлением, при этом определение режима управления включает в себя выбор режима управления из множества режимов управления на базе измеренного значения. Способ, кроме того, включает в себя управление расходом и/или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления, включая: определение управляющего сигнала, передаваемого к полевому устройству, при этом полевое устройство соединено с линией, по которой течет нагнетаемая текучая среда, и передачу управляющего сигнала к полевому устройству.
[006] В другом варианте осуществления система управления технологическим процессом содержит устройство управления технологическим процессом, выполненное с возможностью управления нагнетанием текучей среды, первый коммуникационный канал связи между устройством управления технологическим процессом и по меньшей мере одним из элементов, датчиком давления, определяющим давление текучей среды, и расходомером, определяющим расход текучей среды, и второй коммуникационный канал связи между устройством управления технологическим процессом и полевым устройством, при этом устройство управления технологическим процессом обменивается данными с полевым устройством, чтобы управлять по меньшей мере одним из элементов, давлением или расходом текучей среды. Устройство управления технологическим процессом выполнено с возможностью: приема по первому коммуникационному каналу связи измеренного значения, показывающего расход и/или давление текучей среды, определения режима управления для управления расходом и/или давлением, при этом определение режима управления включает в себя выбор режима управления из множества режимов управления на базе измеренного значения, и управления через второй коммуникационный канал связи расходом и/или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления.
[007] В еще одном варианте осуществления устройство управления технологическим процессом содержит один или более процессоров и модуль передачи данных, выполненный с возможностью приема измеренного значения, показывающего давление или расход текучей среды. Устройство управления технологическим процессом также содержит модуль управления основной задачей, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления основной задачей принуждает устройство управления технологическим процессом поддерживать пластовое давление в пласте на основании нагнетания текучей среды в пласт, и модуль управления задачей корректировки, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления задачей корректировки вынуждает устройство управления технологическим процессом уменьшать измеренное давление текучей среды до уровня порогового значения давления или ниже него. Кроме того, устройство управления технологическим процессом содержит переключатель режимов управления, выполненный с возможностью: выбора модуля управления основной задачей или модуля управления задачей корректировки на основе измеренного значения, и принуждения одного или более процессоров исполнять выбранный модуль управления основной задачей или модуль управления задачей корректировки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[008] На фиг. 1 показан пример системы управления технологическим процессом, содержащей одно или более устройств управления технологическим процессом, выполненных с возможностью управления нагнетанием текучей среды с использованием множественных режимов управления;
[009] На фиг. 2 показана структурная схема примера платформы, которая может быть использована в системе управления технологическим процессом, показанной на фиг. 1;
[0010] На фиг. 3 показана структурная схема примера удаленного оконечного устройства (remote terminal unit, RTU), регулирующего нагнетание текучей среды на множестве устьев скважины;
[0011] На фиг. 4 показана структурная схема примера RTU, которое может быть использовано в качестве одного из устройств управления технологическим процессом, показанных на фиг. 1;
[0012] На фиг. 5 показан пример потока входных и выходных сигналов многоцелевого устройства управления, которое может быть реализовано в RTU, показанном на фиг. 4;
[0013] На фиг. 6 показана последовательность операций примера способа управления нагнетанием текучей среды в соответствии с множественными режимами управления, которые могут быть реализованы с помощью RTU, показанного на фиг. 4;
[0014] На фиг. 7 показана последовательность операций примера способа управления нагнетанием текучей среды в соответствии с режимом управления основной задачей;
[0015] На фиг. 8 показана последовательность операций примера способа управления нагнетанием текучей среды в соответствии с режимом управления задачей корректировки, и
[0016] На фиг. 9 показана последовательность операций примера способа управления нагнетанием текучей среды в соответствии с режимом управления при отсутствии потока.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0017] Настоящее изобретение относится к управлению нагнетанием текучей среды в соответствии с многоцелевыми или множественными режимами управления. В частности, настоящее изобретение относится к способу и устройству для: (i) получения измеренных значений (например, давления и/или расхода), соответствующих нагнетаемой текучей среде; (ii) на основе полученных измеренных значений, выбора одного из множества режимов управления; и (iii) управления нагнетанием текучей среды на основе выбранного режима управления. Управление нагнетанием в соответствии с каждым из множественных режимов управления может включать в себя использование заданных значений, параметров контура управления и функциональных возможностей, отличающихся от заданных значений, параметров контура управления и функциональных возможностей, соответствующих другим режимам управления.
[0018] Путем предварительного определения и использования множественных режимов управления, устройства управления технологическим процессом, отличающиеся от программируемых логических контроллеров (PLC), могут согласованно управлять нагнетанием текучей среды. Например, одно или более удаленных оконечных устройств (remote terminal units, RTU) может управлять нагнетанием текучей среды на основе множественных режимов управления. В таком случае регулирование нагнетания текучей среды не обязательно влечет за собой дорогостоящее обеспечение мощности переменного тока в месте нагнетания (например, в устье скважины). Напротив, источники сравнительно малой мощности, такие как источники мощности на основе солнечных панелей, могут снабжать энергией примерные RTU.
[0019] В некоторых вариантах осуществления множество режимов регулирования (например, используемые RTU) может включать в себя режим управления основной задачей и режим управления задачей корректировки. В режиме управления основной задачей устройство управления технологическим процессом может поддерживать/регулировать давление и/или температуру в пласте на основе заданного значения основной задачи и одного или более параметров основной задачи, конфигурирующих контур управления. В режиме управления задачей корректировки устройство управления технологическим процессом может понижать давление нагнетаемой текучей среды до уровня порогового значения или ниже него на основе заданного значения задачи корректировки и одного или более параметров задачи корректировки, конфигурирующих контур управления.
[0020] В некоторых вариантах осуществления множество режимов управления также может включать в себя режим управления при отсутствии потока. В режиме управления при отсутствии потока устройство управления технологическим процессом может позиционировать один или более клапанов (например, соединенных с линией, через которую проходит нагнетаемая текучая среда) на основе заданного значения при отсутствии потока и одного или более параметров при отсутствии потока. Например, в режиме управления при отсутствии потока могут «дросселироваться» или по меньшей мере частично закрываться один или более клапанов, до тех пор, пока расход нагнетаемой текучей среды находится ниже порогового значения.
[0021] Устройство управления технологическим процессом, такое как RTU, управляющее нагнетанием текучей среды в соответствии с множественными режимами управления, может также содержать переключатель режимов управления. Данный переключатель режимов управления на основе измеренных значений давления и/или расхода нагнетаемой текучей среды выбирает один из множественных режимов управления и принуждает устройство управления технологическим процессом регулировать нагнетаемую текучую среду на основе выбранного режима управления. Например, переключатель режимов управления может выбрать один из режимов, режим управления основной задачей, режим управления задачей корректировки или режим управления при отсутствии потока.
[0022] Хотя во всем дальнейшем описании в качестве примера будут упоминаться RTU, некоторые варианты осуществления системы управления технологическим процессом могут содержать другие устройства управления технологическим процессом, отличающиеся от RTU, которые выполнены с возможностью регулирования нагнетаемой текучей среды в соответствии с множественными режимами управления. Например, некоторые варианты осуществления устройств управления технологическим процессом могут использовать специально конфигурированные RTU и/или специально программируемые PLC. В общем, система управления технологическим процессом может использовать любые сочетания и количество RTU, PLC, контроллеров, устройств позиционирования, или других подходящих вычислительных устройств, выполненных с возможностью управления нагнетанием текучей среды, используя множество режимов управления.
[0023] Кроме того, в дальнейшем описании будут, в качестве примера, упоминаться устройства управления технологическим процессом, выполненные с возможностью управления нагнетанием текучей среды в устье скважины, например, в устье скважины на поверхности нефтяной скважины или скважины природного газа. Однако устройства управления технологическим процессом, выполненные в соответствии с настоящим изобретением, могут управлять нагнетанием текучей среды в какой-либо подходящей точке нагнетания в какой-либо подходящей скважине. Например, RTU может управлять нагнетанием текучей среды в любой подходящей точке нагнетания, отличающейся от устья скважины, и/или в любой подходящий пласт, отличающийся от нефтяного или газового пласта, такой как пласт воды, пласт сточных вод, пласты текучих сред, отличающихся от природного газа (например, жидкий или газообразный кислород, пропан и т. п.), и т. п. Кроме того, «пласт», в который нагнетается текучая среда, как описано в настоящем документе, не обязательно является пластом текучей среды. Например, в варианте осуществления системы управления технологическим процессом может вынуждаться нагнетание текучей среды в кучу добытой руды (например, в процессе, известном как «кучное выщелачивание») для насыщения добытой руды нагнетаемой текучей средой. В общем, пласты, в которые нагнетается текучая среда, в соответствии с множественными режимами управления, могут быть пластами жидкостей, газов или твердых веществ (руда, гравий и т. п.).
[0024] В последующем описании также упоминается вода или пар в качестве примера текучих сред, нагнетаемых в пласт. Однако в вариантах осуществления систем управления технологическим процессом, использующих способы согласно настоящему изобретению, в пласты могут нагнетаться другие текучие среды, кроме воды и пара. Например, в случае, в котором текучая среда нагнетается в кучу добытой руды, нагнетаемой текучей средой может быть кислота. В общем, нагнетаемые текучие среды могут включать в себя жидкости, такие как вода, серная кислота, нефть, хлор и т. п., или газы, такие как кислород, водород, природный газ, аммиак, углекислый газ, окись углерода, метан, ацетилен, пропан и т. п.
Пример системы управления технологическим процессом
[0025] Как показано на фиг. 1, изображена система 10 управления технологическим процессом, выполненная в соответствии с одним вариантом осуществления настоящего изобретения, содержащая одно или более полевых устройств 15, 16, 17, 18, 19, 20, 21 и 22, и одну или более платформ 30 и 31, поддерживающих связь с контроллером 11 технологического процесса. Контроллер 11 технологического процесса может также обмениваться данными с одним или более устройств 35, 36 и 37 управления технологическим процессом, такими как удаленные оконечные устройства (remote terminal units, RTU), выполненные с возможностью управления одним или более полевых устройств 15, 16, 17, 18, 19, 20, 21 и 22, и пример контроллера 11 технологического процесса может обмениваться данными с архивом 12 данных и одной или более рабочих станций 13 пользователя, каждая из которых имеет дисплейный экран 14. В такой конфигурации контроллер 11 технологического процесса передает сигналы к полевым устройствам 15, 16, 17, 18, 19, 20, 21 и 22, устройствам 35, 36 и 37 управления технологическим процессом, платформам 30 и 31, и рабочим станциям 13, и принимает сигналы от них для управления системой управления технологическим процессом.
[0026] Контроллер 11 технологического процесса, устройства 35, 36 и 37 управления технологическим процессом и/или компоненты платформ 30 и 31 могут управлять нагнетанием текучей среды (например, воды или пара) в одно или более устьев скважин 40, 41, 42, 43, 44, 45 и 46. В частности, контроллер 11 технологического процесса, устройства 35, 36 и 37 управления технологическим процессом, и/или компоненты платформ 30 и 31 могут управлять нагнетанием текучей среды в соответствии с множественными режимами управления, такими как режим управления основной задачей, режим управления задачей корректировки и режим управления при отсутствии потока. Хотя это и не показано на фиг. 1, платформы 30 и 31 могут содержать полевые устройства, устройства управления технологическим процессом (например, RTU и/или PLC) или другие компоненты. Дополнительные детали примера платформы описаны со ссылками на фиг. 2.
[0027] В более подробном рассмотрении контроллер 11 технологического процесса системы 10 управления технологическим процессом варианта, изображенного на фиг. 1, соединен через аппаратную систему связи с полевыми устройствами 15, 16, 17, 18, 19, и 20, платформой 30, и устройствами 35 и 36 управления технологическим процессом с помощью плат 26 и 28 ввода/вывода (input/output, I/O). Архивом 12 данных может быть блок сбора данных любого требуемого типа, содержащий любой необходимый тип памяти и любое необходимое или известное программное обеспечение, аппаратные или программно-аппаратные средства для хранения данных. Более того, хотя архив 12 данных изображен на фиг. 1 в виде отдельного устройства, вместо этого или в дополнение к этому он может быть частью одной из рабочих станций 13 или другого вычислительного устройства, такого как сервер. Контроллер 11, который может быть, например, контроллером DeltaV™, продаваемым компанией Emerson Process Management, соединен с обеспечением связи с рабочими станциями 13 и с архивом 12 данных через сеть 29 связи, которая может быть, например, соединением Ethernet.
[0028] Как указано, контроллер 11 показан, как соединенный с обеспечением связи с полевыми устройствами 15, 16, 17, 18, 19 и 20, платформой 30 и устройствами 35 и 36 управления технологическим процессом, используя схему проводной связи, которая может включать в себя использование каких-либо необходимых аппаратных средств, программного обеспечения и/или программно-аппаратных средств для реализации проводной связи. Аппаратная система связи может включать в себя, например, стандартные каналы связи 4-20 мА, и/или какие-либо каналы связи, использующие какой-либо интеллектуальный протокол связи, такой как протокол связи FOUNDATION® Fieldbus, протокол связи HART® и т. п. Полевые устройства 15, 16, 17, 18, 19 и 20 и компоненты платформы 30 могут включать в себя любые типы устройств, таких как устройства позиционирования, устройства сервоуправления, датчики, регуляторы давления, узлы регулирующих клапанов и т. п., тогда как платы 26 и 28 ввода/вывода могут быть устройствами ввода/вывода любого типа, соответствующего любому необходимому протоколу связи или контроллера. В частности, полевые устройства 15, 16, 17, 18, 19 и 20, платформа 30 и устройства 35 и 36 управления технологическим процессом могут обмениваться данными по любым аналоговым линиям (например, стандарта 4-20 мА) или по цифровой шине (например, используя протокол связи Fieldbus) с платами 26 и 28 ввода/вывода. Естественно, полевые устройства 15, 16, 17, 18, 19 и 20, платформа 30, и устройства 35 управления технологическим процессом могут соответствовать любому другому необходимому стандарту (стандартам) или протоколам, включая любые стандарты или протоколы, которые будут разработаны в будущем.
[0029] Кроме того, система 10 управления технологическим процессом, изображенная на фиг. 1, содержит полевые устройства 21 и 22, платформу 31, и устройство 37 управления технологическим процессом, которые обмениваются данными посредством беспроводной связи с контроллером 11 технологического процесса. Беспроводная связь может быть установлена между контроллером 11 и полевыми устройствами 21 и 22, платформой 31 и устройством 27 управления технологическим процессом, используя любое необходимое оборудование беспроводной связи, включая аппаратные средства, программное обеспечение, программно-аппаратные средства или любое их сочетание, известное или разработанное в будущем. В варианте, показанном на фиг. 1, антенна 65 связана и выделена для выполнения беспроводной связи для платформы 31, тогда как антенна 66 связана и совместно использует беспроводную связь для устройства 37 управления технологическим процессом, причем устройство 37 управления технологическим процессом, в свою очередь, соединено с обеспечением связи (например, посредством проводных соединений) с полевыми устройствами 21 и 22. Платформа 31 и/или устройство 37 управления технологическим процессом может реализовывать операции стека протоколов, используемые соответствующим протоколом беспроводной связи для приема, декодирования, маршрутизации, кодирования и отправки радиосигналов через антенны 65 и 66 для осуществления беспроводной связи между контроллером 11 технологического процесса и полевыми устройствами 21 и 22, платформой 31, и устройством 37 управления технологическим процессом. Кроме того, хотя это не показано, реализации системы 10 управления технологическим процессом могут включать в себя любое подходящее число модемов, маршрутизаторов или других компонентов беспроводной связи, соединенных с устройством 37 управления технологическим процессом и/или платформой 31, причем модемы, маршрутизатор или другие компоненты могут принимать, декодировать, маршрутизировать, кодировать и отправлять радиосигналы через антенны 65 и 66.
[0030] Контроллер 11 технологического процесса соединен с одним или более устройств 73 и 74 ввода/вывода, каждое из которых соединено с соответствующей антенной 75 и 76, и эти устройства 73 и 74 ввода/вывода и антенны 75 и 76 работают как передатчики/приемники для выполнения беспроводной связи с полевыми устройствами 21 и 22, платформой 31, и устройством 37 управления технологическим процессом через одну или более беспроводных сетей связи. Беспроводная связь может быть осуществлена, используя один или более известных протоколов беспроводной связи, таких как протокол WirelessHART®, протокол Ember, протокол WiFi, стандарт беспроводной связи IEEE и т. п. Кроме того, устройства 73 и 74 ввода/вывода могут реализовывать операции стека протоколов, используемые этими протоколами связи для приема, декодирования, маршрутизации, кодирования и отправки радиосигналов через антенны 75 и 76 для выполнения беспроводной связи между контроллером 11 и полевыми устройствами 21 и 22, платформой 31, и устройством 37 управления технологическим процессом.
[0031] Как показано на фиг. 1, контроллер 11 обычно содержит процессор 77, который исполняет или контролирует одну или более программ управления технологическим процессом (или любой модуль, этап или подпрограмму), хранящуюся в памяти 78. Программы управления технологическим процессом, сохраненные в памяти 78, могут включать в себя или могут быть связаны с контурами управления, реализованными в производственном предприятии. Как описано далее со ссылками на фиг. 2 и 4, устройства 35, 36 и 37 управления технологическим процессом и компоненты платформ 30 и 31 могут также содержать аналогичные процессоры и/или программы, сохраненные в памяти. По существу, контуры управления, реализованные в производственном предприятии, могут быть реализованы с помощью любого подходящего сочетания контроллера 11 технологического процесса, устройств 35, 36 и 37 управления технологическим процессом и платформ 30 и 31, с функциональными возможностями программ управления технологическим процессом, распределенными любым подходящим способом между контроллером 11 технологического процесса, устройствами 35, 36 и 37, и платформами 30 и 31. Вообще говоря, контроллер 11 технологического процесса, устройства 35, 36 и 37 управления технологическим процессом, и/или платформы 30 и 31 могут исполнять одну или более программ и обмениваться данными с полевыми устройствами 15, 16, 17, 18, 19, 20, 21 и 22, рабочими станциями 13 пользователя, и архивом 12 данных для управления технологическим процессом в любом необходимом режиме (режимах).
Пример платформы
[0032] На фиг. 2 показан пример платформы 200. Система 10 управления технологическим процессом может реализовывать платформу 200 как, например, одну из платформ 30 и 31. Вообще, платформа 200 может быть предварительно изготовленной станцией, предназначенной для определенных технических требований заказчика (например, технические требования оператора нефтяной или газовой скважины) и создаваться по заказу. Платформа 200 может содержать какое-либо число и типы компонентов в соответствии с техническими требованиями к платформе 200. Некоторые компоненты и функциональные возможности примера платформы 200 описаны ниже. Однако платформа, которая может быть реализована в примере системы 10 управления технологическим процессом может быть специально конфигурирована в соответствии с описанными в настоящем документе способами, может содержать компоненты, отличающиеся от описанных ниже компонентов, и может быть изготовлена на заказ любым подходящим способом для конкретной установки или применения.
[0033] Как показано на фиг. 2, пример платформы 200 может быть физически соединен с линией 202, такой как трубопровод, по которому проходит текучая среда. Текучая среда (например, вода или пар) может подаваться с помощью источника 204 питания для нагнетания, и подходящее сочетание компонентов платформы 200 и контроллера 208 технологического процесса может управлять нагнетанием текучей среды в устье скважины 206. Хотя на фиг. 2 они показаны, как находящиеся вблизи, платформа 200, устье скважины 206, источник 204 питания для нагнетания, и контроллер 208 технологического процесса не должны быть близко физически, чтобы обеспечивать управление нагнетанием текучей среды в устье скважины 206 платформой 200 и/или контроллером 208 технологического процесса. Действительно, многие варианты осуществления платформы 200 могут включать в себя расположение платформы 200 в сотнях футов, тысячах футов или даже миль от устья скважины 206, источника 204 питания для нагнетания, и/или контроллера 208 технологического процесса.
[0034] Источник 210 питания может снабжать энергией некоторые или все из компонентов платформы 200. С этой целью источник 210 питания может подавать по одному или более электрических соединений (например, проводов или кабелей), определенные значения тока и/или напряжения к компонентам платформы 200, так чтобы компоненты были способны работать. В некоторых вариантах осуществления источник 210 питания может снабжать энергией платформу 200 при сравнительно низких мощностях по сравнению с мощностью переменного тока (например, мощностью, потребляемой от сети), используемой для питания других устройств, таких как PLC. Кроме того, источник 210 энергии может подавать энергию к платформе от генераторов мощности, таких как генераторы мощности, использующие солнечные панели или ветряные двигатели, для генерации энергии. Таким образом, операторы систем управления технологическим процессом, таких как система 10 управления технологическим процессом, могут устанавливать как платформу 200, так и источник 210 энергии в любом числе местоположений вдоль линии 202, например, вблизи устья скважины 206, не будучи ограниченными требованиями к мощности, потребляемой от сети. То есть, платформа 200 и источник 210 энергии могут быть переносными и/или модульными.
[0035] Для дополнительного обеспечения портативности платформы 200 и легкости устанавливания, в некоторых вариантах осуществления платформы 200 могут обмениваться данными с контроллером 208 технологического процесса с помощью радиосигналов 212. Например, платформа 200 может отправлять и/или принимать радиосигналы 212 через антенну 214. Хотя на фиг. 2 показан данный тип беспроводной связи, некоторые платформы могут обмениваться данными с контроллерами технологического процесса через проводные соединения и/или через одно или более промежуточных устройств, таких как модемы, маршрутизаторы, шлюзы и т. п.
[0036] Пример платформы 200 может содержать удаленное оконечное устройство (remote terminal unit, RTU) 220, узел 222 клапана/привода, расходомер 224, и датчик 226 давления. RTU 220 может создавать и отправлять управляющие сигналы к узлу 222 клапана/привода на основе по меньшей мере частично значений измеренного давления и расхода от датчика 226 давления и расходомера 224 и/или на основе радиосигналов 212. Данные управляющие сигналы могут принуждать узел 222 клапана/привода работать (например, открываться, закрываться или перемещаться на относительное расстояние) так, чтобы управлять давлением и/или расходом текучей среды, нагнетаемой в устье скважины 206. Управляющие сигналы могут включать в себя любое подходящее сочетание аналоговых (например, 4-20 мА) или цифровых (например, кодированных WirelessHART® или HART®) сигналов, в зависимости от возможностей обмена данными и/или конфигурации узла 222 клапана/привода. Дополнительные детали примера RTU, которые могут быть реализованы как RTU 220, описаны со ссылкой на фиг. 4, а дополнительные детали примера способов для управления нагнетанием текучей среды (например, с помощью RTU 220) описаны со ссылкой на фиг. 5-9.
[0037] Датчик 226 давления может содержать любой подходящий измерительный прибор и/или преобразователи атмосферного давления, выполненные с возможностью передавать давление текучей среды к RTU 220. Расходомер 224 может содержать вихревые расходомеры, магнитные расходомеры, расходомеры Кориолиса, расходомеры дифференциального давления, и/или любые другие подходящие измерительные приборы, датчики, или элементы, выполненные с возможностью измерения расхода текучей среды через линию 202. Хотя на фиг. 2 показан как датчик 226 давления, так и расходомер 224, расположенные выше по потоку (например, ближе к источнику 204 питания для нагнетания) от узла 222 клапана/привода, некоторые варианты осуществления платформ могут включать в себя RTU, которые соединены с обеспечением связи с датчиками давления и/или расходомерами ниже по потоку от узла 222 клапана/привода. В частности, пример RTU 220 может принимать показания давления в устье скважины 206 от датчика 228 давления, расположенного ниже по потоку. В основном, платформа, или RTU, содержащееся на/в платформе, может обмениваться данными с любым числом датчиков давления и расходомеров выше по потоку и любым числом датчиков давления и расходомеров ниже по потоку от управляемого узла клапана/привода.
Пример устройства управления технологическим процессом, управляющего нагнетанием текучей среды во множество устьев скважин
[0038] На фиг. 3 показано устройство управления технологическим процессом, RTU 300, управляющее нагнетанием текучей среды во множество устьев скважин 302a, 302b и 302c. Система управления технологическим процессом может реализовывать пример RTU 300 как, например, одно из устройств 36 и 37 управления технологическим процессом. RTU 300 может быть расположено вблизи или соединяться с питающей линией 304 у коллектора 306, в варианте осуществления, в котором текучая среда проходит через питающую линию 304 от источника 308 питания для нагнетания в коллектор 306. Множество нагнетательных линий 310a, 310b и 310c могут затем распределять текучую среду к множеству устьев скважин 302a, 302b и 302c, соответственно.
[0039] Хотя на фиг. 3 показана одна питающая линия 304, один коллектор 306, одно RTU 300, три нагнетающих линии 310a, 310b и 310c, и три устья скважин 302a, 302b и 302c, некоторые варианты осуществления систем управления технологическим процессом могут содержать другие количества и сочетания питающих линий, коллекторов, RTU, нагнетающих линий и устьев скважин. Например, единственный коллектор может подавать текучую среду к двум или более чем трем устьям скважин, а в другом примере множество (два, три, четыре и т. п.) коллекторов, каждый из которых связан с отдельным RTU, могут подавать к множеству устьев скважин текучую среду для нагнетания в устья скважин.
[0040] RTU 300 может создавать и отправлять управляющие сигналы к узлам 312a, 312b, и 312c клапана/привода. RTU 300 может создавать эти управляющие сигналы на основе по меньшей мере частично измеренных значений давления и расхода от датчиков 314, 316a, 316b и 316c давления и расходомеров 318a, 318b и 318c и/или на основе сигналов от контроллера 320 технологического процесса. Данные управляющие сигналы могут принуждать узлы 312a, 312b и 312c клапана/привода работать (например, открываться, закрываться или перемещаться на относительное расстояние) так, чтобы управлять давлением и/или расходом текучей среды, нагнетаемой в устье скважин 302a, 302b и 302c. Управляющие сигналы могут включать в себя любое подходящее сочетание аналоговых (например, 4-20 мА) или цифровых (например, кодированных WirelessHART® или HART®) сигналов, в зависимости от возможностей обмена данными и/или конфигурации узлов 302a, 302b и 302c клапана/привода. Дополнительные детали примера RTU, которые могут быть реализованы как RTU 300, описаны со ссылкой на фиг. 4, а дополнительные детали примера способов для управления нагнетанием текучей среды (например, с помощью RTU 300) описаны со ссылкой на фиг. 5-9.
[0041] Датчики 314, 316a, 316b и 316c давления и расходомеры 318a, 318b и 318c могут быть аналогичны датчикам и расходомерам, описанным со ссылками на фиг. 2. В данном случае «находящийся выше по потоку» датчик 314 давления может быть конфигурирован для определения давления текучей среды в питающей линии 304 или коллекторе 306, в противоположность определению давления выше по потоку от узлов 312a, 312b 312c клапана/привода в нагнетательных линиях 310a, 310b и 310c. Однако, вообще, один или более датчиков давления могут определять давления текучей среды в питающих линиях, нагнетательных линиях и коллекторах в точках выше по потоку от контролируемых узлов клапана/привода.
Пример удаленного оконечного устройства
[0042] На фиг. 4 показана структурная схема примера удаленного оконечного устройства (remote terminal unit, RTU) 400, которое может регулировать нагнетание текучей среды в соответствии с множественными режимами управления; RTU 400 может быть реализовано как одно из устройств 35, 36 или 37 управления технологическим процессом, или как, например, компонент одной из платформ 30 и 31. Хотя пример RTU 400 описан ниже и показан на фиг. 4, некоторые варианты осуществления систем управления технологическим процессом могут выполнять множество режимов управления посредством любого подходящего сочетания RTU и других устройств управления технологическим процессом.
[0043] Пример RTU 400 содержит один или более процессоров 402, один или более модулей 404 ввода/вывода (Input/Output, I/O) или передачи данных и энергонезависимую память 406. Системная шина RTU 400 может соединять один или более процессоров 402 с одним или более модулями 404 ввода/вывода или передачи данных и энергонезависимой памятью 406. Например, системная шина, соединяющая эти компоненты, может включать в себя шину стандартной промышленной архитектуры (Industry Standard Architecture, ISA), шину микроканальной архитектуры (Micro Channel Architecture, MCA), шину расширенной архитектуры промышленного стандарта (Enhanced ISA, EISA), локальную шину ассоциации по вопросам стандартизации электронной видеоаппаратуры (Video Electronics Standards Association, VESA), шину соединения полевых компонентов (Peripheral Component Interconnect, PCI) или шину расширения и шину взаимодействия полевых компонентов типа «экспресс» (Peripheral Component Interconnect Express, PCI-E).
[0044] Энергонезависимая память 406 может содержать энергонезависимый носитель, который может быть доступен с помощью RTU 400. В качестве примера, а не ограничения, энергонезависимая память 406 может содержать оперативное запоминающее устройство (random-access memory, RAM), постоянное запоминающее устройство (read-only memory, ROM), электрически стираемое ПЗУ (EEPROM), оптические запоминающие диски, магнитные запоминающие устройства и/или другие энергонезависимые носители, которые могут быть использованы для хранения информации, доступной с помощью вычислительного устройства, такого как RTU 400.
[0045] Энергонезависимая память 406 может хранить информацию, включая машиночитаемые команды, программные модули, структуры данных или другие данные, такие как управляющая логика, параметры контура управления и/или другая информация, облегчающая управление нагнетаемой текучей средой. В частности, пример энергонезависимой памяти 406 может включать в себя многоцелевое устройство 408 управления, специфически или специально конфигурирующее RTU 400 таким образом, что при исполнении процессором (процессорами) 402, многоцелевое устройство 408 управления принуждает RTU 400 управлять нагнетаемой текучей средой на основе множественных режимов управления. Многоцелевое устройство 408 управления может содержать множество модулей управления, каждый из которых принуждает RTU 400 управлять нагнетанием текучей среды (например, давлением и/или расходом текучей среды) на основе соответствующего режима управления. В варианте осуществления, показанном на фиг. 4, многоцелевое устройство 408 управления содержит модуль 410 управления основной задачей, модуль 412 управления задачей корректировки и модуль 414 управления при отсутствии потока. Чтобы выбирать, какой из данных модулей 410, 412 и 414 должен управлять нагнетанием текучей среды, многоцелевое устройство 408 управления может также содержать переключатель 416 режимов управления.
[0046] Будучи выбранным, активированным или включенным (например, с помощью переключателя 416 режимов управления), модуль 410 управления основной задачей может принуждать RTU 400 управлять давлением и/или расходом нагнетаемой текучей среды в соответствии с «основной задачей». Основной задачей может быть, в качестве примера, определение различных параметров управляющей логики (например, реализованной в модуле 410 управления основной задачей), таких как пропорциональные, интегральные или производные (proportional, integral, or derivative, PID) параметры или заданные значения механизма контура PID-управления. Используя и/или реализуя такие определения, многоцелевой модуль 410 управления, может управлять давлением и/или расходом нагнетаемой текучей среды таким образом, что измеренное давление и/или расход регулируются относительно заданного значения основной задачи (в пределах определенного допуска). Например, модуль 410 управления основной задачей, будучи выбранным с помощью переключателя 416 режимов управления и исполняемым процессором (процессорами) 402, может управлять давлением нагнетаемой текучей среды таким образом, чтобы поддерживалось измеренное пластовое давление в пласте (например, нефтяном пласте) при нагнетании в пласт нагнетаемой текучей среды.
[0047] Будучи выбранным, активированным или включенным (например, с помощью переключателя 416 режимов управления), модуль 412 управления задачей корректировки может принуждать RTU 400 управлять давлением и/или расходом нагнетаемой текучей среды в соответствии с «задачей корректировки». Задачей корректировки может быть, в качестве примера, определение различных параметров управляющей логики (например, реализованной в модуле 410 управления основной задачей), таких как пропорциональные, интегральные или производные (proportional, integral, or derivative, PID) параметры или заданные значения механизма контура PID-управления. Параметры, определяемые задачей корректировки, могут быть отличающимися от тех, которые определены основной задачей. То есть, модуль 410 управления основной задачей может быть конфигурирован с другими параметрами, настройками и т. п., чем модуль 412 управления задачей корректировки, такими как другие PID-параметры и заданные значения. По существу, модуль 412 управления задачей корректировки управляет нагнетаемой текучей средой иначе, чем модуль 410 управления основной задачей. В некоторых вариантах осуществления модуль 412 управления задачей корректировки может управлять давлением нагнетаемой текучей среды для понижения давления до уровня порогового значения или ниже него.
[0048] Будучи выбранным, активированным или включенным (например, с помощью переключателя 416 режимов управления), модуль 414 управления при отсутствии потока может принуждать RTU 400 управлять одним или более клапанов или других полевых устройств, когда расход нагнетаемой текучей среды падает ниже определенного порогового значения. С этой целью модуль 414 управления при отсутствии потока может работать на основе параметров и/или заданных значений, отличающихся от тех, которые связаны с модулем 410 управления основной задачей и модулем 412 управления задачей корректировки. Например, модуль 414 управления задачей корректировки может «дросселировать» (например, частично перекрывать) определенные клапаны, когда расход нагнетаемой текучей среды падает ниже порогового значения. Таким образом, пример модуля 414 управления при отсутствии потока может предотвращать подъем давления, потока или др., когда автономный источник нагнетаемой текучей среды снова включается в контур.
[0049] Переключатель 416 режимов управления может выбирать один из данных режимов управления (например, управления в соответствии с одним из режимов 410, 412 и 414) автоматически, на основе измеренных значений давления и/или расхода, или на основе подаваемых вручную команд от контроллера технологического процесса, управляемой человеком системы управления технологическим процессом или другого подходящего объекта. В некоторых вариантах осуществления RTU 400 может принимать (например, через модуль 404 ввода/вывода или передачи данных) измеренное давление и/или расходы от датчиков давления и/или расходомеров, соответственно, выше по потоку и/или ниже по потоку от узла управления клапана/привода. Переключатель 416 режимов управления может определять, отвечают ли данные принятые значения определенным условиям, связанным с каждым из режимов управления, или модулей 410, 412 и 414. Если условия отвечают одному или более модулей 410, 412 и 414, переключатель 416 режимов управления может выбирать один или более модулей 410, 412 и 414 и принуждать RTU 400 исполнять выбранный один или более модулей 410, 412 и 414. Например, если расход ниже порогового значения, переключатель 416 режимов управления может выбрать модуль 414 управления при отсутствии потока, или, если давление выше порогового значения, переключатель 416 режимов управления может выбрать модуль 412 управления задачей корректировки. Такие варианты выбора описаны далее со ссылкой на фиг. 6.
[0050] Хотя на фиг. 4 показаны три модуля 410, 412и 414, соответствующие трем различным выбираемым режимам управления (например, управление основной задачей, задачей корректировки и при отсутствии потока), RTU и/или другие устройства управления технологическим процессом, осуществляющие управление на основе множественных режимов управления, могут использовать другие количества и сочетания режимов, осуществляющие другие количества режимов управления. Например, RTU может реализовывать переключатель режимов управления, который выбирает из четырех, пяти, шести и т. д. различных модулей, причем каждый модуль, соответствующий различным режимам управления, конфигурированный в соответствии с различной управляющей логикой. Кроме того, некоторые режимы управления могут быть реализованы (например, в RTU) с помощью множества модулей, алгоритмов, программ или устройств. Например, функциональные возможности модуля управления основной задачей могут быть разделены на два, три, четыре и т. д. различных модуля, программы, алгоритма и т. п. в памяти RTU.
[0051] Модуль 404 ввода/вывода или передачи данных RTU 400 может облегчать аналоговую и/или цифровую и проводную и/или беспроводную связь между RTU 500 и контроллерами технологического процесса, полевыми устройствами (например, узлы привода клапана) и/или одной или более сетей. Логические соединения между RTU 400 и одним или более удаленных устройств может включать в себя одну или более беспроводных сетей связи, таких как сети, облегчающие связь в соответствии с протоколом WirelessHART®, протоколом Ember, протоколом WiFi, стандартом беспроводной связи IEEE, и т. п., и одну или более проводных сетей связи, таких как сети, облегчающие связь 4-20 мА, связь, соблюдающую протокол связи FOUNDATION® Fieldbus или протокол связи HART®, связь по сети Ethernet, и т. п. Однако следует учитывать, что могут быть использованы другие средства установления линии связи между RTU 400 и удаленным устройством.
[0052] В некоторых вариантах осуществления RTU 400 может быть модульным. То есть, компоненты RTU 400, такие как модуль 404 ввода/вывода или передачи данных, процессор (процессоры) 402, и/или энергонезависимая память 406, могут быть отделимыми модулями, соединенными друг с другом, чтобы образовывать RTU 400 таким образом, чтобы RTU 400 имело определенные функциональные возможности. Например, RTU 400 может иметь «объединительную панель», которая соединена с центральным процессором (central processing unit, CPU) или модулями процессоров, модулями ввода мощности, модулями передачи данных и модулями ввода/вывода. Таким образом, некоторые варианты осуществления RTU 400 могут быть расширяемыми и могут включать в себя какое-либо число модулей и/или компонентов в дополнение к описанным выше компонентам. Кроме того, по меньшей мере некоторые из компонентов, изображенных на фиг. 4, могут быть разделены между модулями RTU 400 любым подходящим способом.
Пример способов управления нагнетаемой текучей средой с помощью множественных режимов управления
[0053] На фиг. 5 показан пример потока входных и выходных сигналов многоцелевого устройства 500 управления. RTU 400 может реализовать пример многоцелевого устройства 500 управления как, например, многоцелевое устройство 408 управления.
[0054] Пример многоцелевого устройства 500 управления может принимать параметры и значения 502, связанные с режимом управления основной задачей и/или модулем управления основной задачей, параметры и значения 504 связанные с режимом управления задачей корректировки и/или модулем управления задачей корректировки, и параметры и значения 506, связанные с режимом управления при отсутствии потока и/или модулем управления при отсутствии потока. Многоцелевое устройство 408 управления может управлять давлением и/или расходом нагнетаемой текучей среды в соответствии с параметрами и значениями 502, 504 и 506, когда переключатель режимов управления многоцелевого устройства 500 управления выбирает режим управления основной задачей, режим управления задачей корректировки и режим управления при отсутствии потока, соответственно.
[0055] Независимо от выбранного режима управления, пример многоцелевого устройства 500 управления может создавать, как выходной, управляющий сигнал 508 позиционирования клапана так и, необязательно, показатель выбранного режима 510 управления. Как уже описано со ссылками на фиг. 2 и 3, и как описано ниже со ссылками на фиг. 6, 7, 8 и 9, RTU, такое как RTU 400, может передавать управляющий сигнал 508 позиционирования клапана к узлу клапана/привода для работы таким образом, чтобы давление и/или расход нагнетаемой текучей среды было управляемым. Показатель выбранного режима 510 управления может указывать, какой из режимов, режим управления основной задачей, режим управления задачей корректировки или режим управления при отсутствии потока, был использован для создания управляющего сигнала 508 позиционирования клапана, какой режим управления основной задачей, режим управления задачей корректировки или режим управления при отсутствии потока соответствует параметрам и значениям 502, 504 и 506, соответственно.
[0056] В некоторых вариантах осуществления многоцелевое устройство 500 управления может также принимать в качестве ввода показатель ранее выбранного режима 512 управления. Пример многоцелевого устройства 500 управления может использовать такой показатель при выборе (например, с помощью переключателя режимов работы) режим управления для следующего «промежутка» управления, как далее описано со ссылкой на фиг. 6. В сценарии, в котором не было ранее выбранного режима управления (например, после инициации управления нагнетаемой текучей средой), многоцелевое устройство 500 управления может использовать режим управления по умолчанию или исходный режим управления, который, например, был задан заранее.
[0057] Кроме того, многоцелевое устройство 500 управления может принимать, в некоторых вариантах осуществления, показатель ручного или автоматического режима 514 работы. Показатель 514 может быть создан и передан с помощью контроллера технологического процесса или человека-оператора RTU. Например, человек-оператор RTU, такого как RTU 400, может использовать кнопку, сенсорный экран, переключатель или другой интерфейс, чтобы задавать режим работы RTU, ручной или автоматический. В другом примере программа контроллера технологического процесса или человек, взаимодействующий с контроллером технологического процесса, может, через контроллер технологического процесса задавать режим работы RTU, ручной или автоматический. Если показатель 514 указывает автоматический режим работы, многоцелевое устройство 500 управления может автоматически выбирать режим управления и создавать управляющий сигнал 508 позиционирования клапана на основании выбранного режима управления. Если показатель 514 указывает ручной режим работы, многоцелевое устройство 500 управления может использовать только режим управления, выбранный вручную оператором или контроллером технологического процесса, в варианте осуществления.
[0058] На фиг. 6 приведена последовательность операций примера способа 600 для управления нагнетаемой текучей средой в соответствии с множественными режимами управления. Способ 600 может быть реализован с помощью одного из RTU, например, 35, 36, 37, 220, 300 или 400. Для простоты описания компоненты примера RTU 400 упоминаются ниже. Однако любые подходящие устройства управления технологическим процессом или сочетания устройств управления технологическим процессом могут реализовать функциональные возможности, описанные со ссылкой на способ 600.
[0059] В способе 600, после задержки в течение интервала времени (этап 602), устанавливается режим управления на основе принятых значений давления и/или расхода (этап 604). Например, некоторые устройства управления технологическим процессом, такие как RTU 400, могут управлять давлением и/или расходом нагнетаемой текучей среды в течение заданных или иначе определяемых интервалов времени, таких как интервалы десять секунд, тридцать секунд, одна минута, полчаса и т. п. В течение каждого из этих интервалов времени RTU 400 может управлять давлением и/или расходом, используя выбранный один из множественных режимов управления. После каждого одного из этих интервалов времени (этап 602), может быть выбран последующий режим работы на следующие интервалы времени.
[0060] В некоторых вариантах осуществления, ряд режимов управления, из которых выбран режим управления, может включать в себя режим управления основной задачей, режим управления задачей корректировки и режим управления при отсутствии потока. RTU 400 может использовать режим управления основной задачей для управления давлением нагнетаемой текучей среды, таким, как пластовое давление, поддерживаемое в пласте, и RTU 400 может использовать режим управления задачей корректировки для понижения давления нагнетаемой текучей среды до уровня порогового значения или ниже него (например, когда RTU 400 определяет, что давление превышает пороговое значение). Кроме того, RTU может использовать режим управления при отсутствии потока для управления одним или более узлов клапана/привода, когда расход нагнетаемой текучей среды падает ниже порогового значения.
[0061] Поскольку данные примеры режимов управления могут быть конфигурированы для управления нагнетаемой текучей средой при определенных условиях, режим управления может быть задан, выбран или осуществлен на этапе 604 способа 600, путем определения того, отвечает ли определенным условиям текущее или недавнее давление и/или расход нагнетаемой текучей среды. Например, переключатель 416 режимов управления может анализировать измеренные значения давления и/или расхода (например, принятые через модуль (модули) 404 ввода/вывода и передачи данных), чтобы определять, находится ли: (i) давление нагнетаемой текучей среды выше одного или более пороговых значений; и (ii) расход нагнетаемой текучей среды ниже одного или более пороговых значений. Если первое условие (i) удовлетворяется, переключатель 416 режимов управления может задавать режим управления как режим управления задачей корректировки. Если второе условие (ii) удовлетворяется, переключатель 416 режимов управления может задавать режим управления как режим управления при отсутствии потока. В некоторых вариантах осуществления, одному из этих определений, (i) или (ii), может быть отдано предпочтение перед другими, так что, если оба условия удовлетворяются, режим управления может быть задан на основе приоритетного одного из определений, (i) или (ii). Если ни одно из этих условий не удовлетворено, в варианте осуществления режим управления может быть задан как режим управления основной задачей.
[0062] Пример способа 600, кроме того, включает в себя определение того, задан ли режим управления как режим управления при отсутствии потока (этап 606). Если режим управления задан как режим управления при отсутствии потока, или если осуществлен или выбран режим управления при отсутствии потока, последовательность операций способа 600 переходит к этапу 608, где узел клапана/привода регулируется в соответствии с режимом управления при отсутствии потока. Дополнительные детали примера способа управления в соответствии с режимом управления при отсутствии потока описаны со ссылкой на фиг. 9. С другой стороны, если режим управления задан не как режим управления при отсутствии потока, последовательность операций способа 600 переходит к этапу 610.
[0063] На этапе 610 RTU 400 может определять, задан ли, установлен ли или выполняется ли режим управления задачей корректировки (этап 610). Если режим управления задан как режим управления задачей корректировки, последовательность операций способа 600 переходит к этапу 612, где давление нагнетаемой текучей среды регулируется в соответствии с режимом управления задачей корректировки. Дополнительные детали примера способа управления в соответствии с режимом управления задачей корректировки описаны со ссылкой на фиг. 8. С другой стороны, если режим управления не задан как режим управления задачей корректировки, последовательность операций способа 600 переходит к этапу 614. На этапе 614, RTU 400 может управлять давлением нагнетаемой текучей среды в соответствии с режимом управления основной задачей. Дополнительные детали примера способа управления в соответствии с режимом управления основной задачей описаны со ссылкой на фиг. 7.
[0064] На фиг. 7 показана последовательность операций примера способа 700 управления давлением нагнетаемой текучей среды в соответствии с режимом управления основной задачей. Способ 700 может быть реализован с помощью одного из RTU, например, 35, 36, 37, 220, 300 или 400. В частности, модуль 410 управления основной задачей RTU 400 может реализовывать по меньшей мере одну из функциональных возможностей, описанных со ссылкой на способ 700. Для простоты описания компоненты примера RTU 400 упоминаются ниже. Однако любые подходящие устройства управления технологическим процессом или сочетания устройств управления технологическим процессом могут реализовать функциональные возможности, описанные со ссылкой на способ 700.
[0065] В примере способа 700 модуль 410 управления основной задачей может определять погрешность между одним или более значениями регулируемых переменных основной задачи и соответствующими заданными значениями основной задачи (этап 702). Одно или более значений регулируемых переменных основной задачи могут быть измеряемыми значениями давления, расхода и/или любыми другими подходящими измеряемыми значениями нагнетаемой текучей среды. Модуль 410 управления основной задачей может принимать заданные значения основной задачи от контроллера технологического процесса или от человека-оператора/пользователя системы управления технологическим процессом, или модуль 410 управления основной задачей может определять заданные значения для управления давлением нагнетаемой текучей среды, таким образом, чтобы поддерживалось пластовое давление. Модуль 410 управления основной задачей может определять погрешность между одним или более значений регулируемых переменных основной задачи и соответствующими заданными значениями основной задачи путем вычитания значений, преобразования значений, возведения в квадрат значений, суммирования значений, и т. п.
[0066] Пример способа 700 может также включать в себя определение на основе погрешности изменения, Δ, которое должно применяться для предыдущего управляющего сигнала позиционирования клапана (этап 704). Данное изменение, будучи примененным к предыдущему управляющему сигналу позиционирования клапана, создает новый управляющий сигнал позиционирования клапана, который вынуждает узел клапана/привода работать таким образом, чтобы регулировать давление и/или расход нагнетаемой текучей среды. Модуль 410 управления основной задачей может создавать изменение на основе различных аккумулируемых, динамически определяемых и/или заданных параметров алгоритмов PID-регулятора. Например, модуль 410 управления основной задачей может объединять (например, суммировать, усреднять и т. п.) погрешность вместе с другими пропорциональными, интегральными и производными элементами алгоритма PID-регулятора для создания изменения Δ. После того как изменение Δ создано, модуль 410 управления основной задачей может применять изменение Δ для создания текущего или нового управляющего сигнала позиционирования клапана (этап 706).
[0067] Модуль 410 управления основной задачей или другой подходящий модуль RTU 400 может использовать созданный управляющий сигнал позиционирования клапана для управления одним или более узлов клапана/привода (этап 708). Например, модуль 410 управления основной задачей может передавать показатель созданного управляющего сигнала позиционирования клапана к модулю (модулям) 404 ввода/вывода и передачи данных, и модуль (модули) 404 ввода/вывода и передачи данных могут передавать созданный управляющий сигнал позиционирования клапана к одному или более узлов клапана/привода, чтобы принуждать один или более узлов клапана/привода работать на основе созданного управляющего сигнала позиционирования клапана.
[0068] На фиг. 8 показана последовательность операций примера способа 800 управления давлением нагнетаемой текучей среды в соответствии с режимом управления задачей корректировки. Способ 800 может быть реализован с помощью одного из RTU, например, 35, 36, 37, 220, 300 или 400. В частности, модуль 412 управления задачей корректировки RTU 400 может реализовывать по меньшей мере одну из функциональных возможностей, описанных со ссылкой на способ 800. Для простоты описания компоненты примера RTU 400 упоминаются ниже. Однако любые подходящие устройства управления технологическим процессом или сочетания устройств управления технологическим процессом могут реализовать функциональные возможности, описанные со ссылкой на способ 800.
[0069] В примере способа 800, модуль 412 управления задачей корректировки может определять, превышает ли одна или более регулируемых переменных задачи корректировки одно или более пороговых значений (этап 802). В некоторых вариантах осуществления модуль 412 управления задачей корректировки может использовать пороговое значение для давления нагнетаемой текучей среды, где пороговое значение определяет максимальное давление. Модуль 412 управления задачей корректировки может управлять давлением нагнетаемой текучей среды таким образом, чтобы понижать и/или поддерживать его ниже данного порогового значения. В таких случаях модуль 412 управления задачей корректировки сравнивает измеренное значение давления нагнетаемой текучей среды с пороговым значением для определения того, превышает ли измеренное давление пороговое значение. Если измеренное значение давления не превышает пороговое значение, последовательность операций способа 800 может переходить к этапу 804, где управление задачей корректировки заканчивается. Однако если измеренное значение давления выше порогового значения, последовательность операций способа 800 может переходить к этапу 806.
[0070] На этапе 806 модуль 412 управления задачей корректировки может определять погрешность между одним или более значений регулируемых переменных задачи корректировки (например, значений давления) и соответствующими заданными значениями задачи корректировки (этап 702). Как одна или более регулируемых переменных задачи корректировки (например, давление), так и заданные значения задачи корректировки могут отличаться от переменных основной задачи и/или заданных значений основной задачи. Однако аналогично функциональным возможностям, описанным со ссылкой на фиг. 7, модуль 412 управления задачей корректировки может определять погрешность между одним или более значений регулируемых переменных задачи корректировки и соответствующими заданными значениями задачи корректировки путем вычитания значений, преобразования значений, возведения в квадрат значений, суммирования значений, и т. п. Кроме того, аналогично функциональным возможностям, описанным со ссылкой на фиг. 7, модуль 412 управления задачей корректировки может определять изменение, которое должно применяться к предыдущему управляющему сигналу клапана (этап 808), создавать новый управляющий сигнал клапана на основе изменения (этап 810), и управлять узлом клапана/привода, используя созданный управляющий сигнал клапана (этап 812).
[0071] На фиг. 9 показана последовательность операций примера способа 900 управления узлом клапана/привода в соответствии с режимом управления при отсутствии потока. Способ 900 может быть реализован с помощью одного из RTU, например, 35, 36, 37, 220, 300 или 400. В частности, модуль 414 управления при отсутствии потока RTU 400 может реализовывать по меньшей мере одну из функциональных возможностей, описанных со ссылкой на способ 900. Для простоты описания компоненты примера RTU 400 упоминаются ниже. Однако любые подходящие устройства управления технологическим процессом или сочетания устройств управления технологическим процессом могут реализовать функциональные возможности, описанные со ссылкой на способ 900.
[0072] В примере способа 900 модуль 414 управления при отсутствии потока может определять, находится ли расход нагнетаемой текучей среды ниже одного или более пороговых значений (этап 902). В некоторых сценариях расход нагнетаемой текучей среды может падать ниже одного или более пороговых значения вследствие поломки на источнике питания для нагнетания, таком как один из источников 204 или 308 питания для нагнетания. Для обнаружения этого или других сценариев модуль 414 управления при отсутствии потока сравнивает измеренное значение расхода нагнетаемой текучей среды с пороговым значением для определения того, находится ли измеренное значение расхода ниже порогового значения. Если измеренное значение расхода не ниже порогового значения, последовательность операций способа 900 может переходить к этапу 904. Однако если измеренный расход ниже порогового значения, последовательность операций способа 900 может переходить к этапу 906.
[0073] На этапе 904, модуль 414 управления при отсутствии потока может определять, использует ли предыдущий интервал регулирования RTU 400 режим управления при отсутствии потока. Если предыдущий интервал регулирования, как далее описано со ссылкой на фиг. 6, был установлен таким образом, что RTU 400 выполняет управление в соответствии с режимом управления при отсутствии потока, последовательность операций способа 900 может переходить к этапу 908. В противном случае последовательность операций способа 900 переходит к этапу 910, где управление в соответствии с режимом управления при отсутствии потока заканчивается.
[0074] На этапе 908 модуль 414 управления при отсутствии потока может определять, является ли промежуток времени большим, чем пороговое значение времени, где промежуток времени указывает, в течение какого времени обнаруженный расход нагнетаемой текучей среды был больше, чем пороговое значение потока на этапе 902. Таким образом, модуль 414 управления при отсутствии потока может учитывать «колебание» расходов около порогового значения потока на этапе 902, в то же время, избегая множества переходов между режимом управления при отсутствии потока и другими режимами управления. Если промежуток времени больше, чем пороговое значение времени, способ 900 может переходить к этапу 910, где управление в соответствии с режимом управления при отсутствии потока заканчивается. Однако если промежуток времени равен пороговому значению времени или меньше него, последовательность операций способа 900 может переходить к этапу 912.
[0075] На этапе 906 модуль 414 управления при отсутствии потока может также определять, является ли промежуток времени большим, чем пороговое значение времени, где, в случае этапа 906, промежуток времени указывает, в течение какого времени обнаруженный расход нагнетаемой текучей среды был больше, чем пороговое значение потока на этапе 902. Если промежуток времени меньше, чем пороговое значение времени, или равен ему, способ 900 может переходить к этапу 910, где управление в соответствии с режимом управления при отсутствии потока заканчивается. Однако если промежуток времени больше, чем пороговое значение времени (на этапе 906), последовательность операций способа 900 может переходить к этапу 912.
[0076] При переходе к этапу 912 через этап 908 или 906 модуль 414 управления при отсутствии потока может создавать управляющий сигнал клапана, равный заданному значению при отсутствии потока (этап 912), и управлять узлом клапана/привода на основе данного управляющего сигнала клапана (этап 914). Данное заданное значение при отсутствии потока может отличаться от заданных значений, связанных с модулем управления основной задачей и модулем управления задачей корректировки. В частности, заданное значение при отсутствии потока может быть определено таким образом, чтобы создаваемый управляющий сигнал клапана приводил к «дросселированию» узла клапана/привода (например, частичному перекрытию или частичному перемещению) или полному закрыванию. Таким образом, дросселированный или закрытый клапан/привод может уменьшать выброс (например, расхода или давления) нагнетаемой текучей среды после того как подача нагнетаемой текучей среды восстановлена.
Дополнительные соображения
[0077] Хотя настоящее изобретение описано со ссылками на конкретные примеры, которые предназначены только для иллюстрации, а не для ограничения объема изобретения, специалисту в данной области должно быть понятно, что могут быть выполнены изменения, дополнения или исключения раскрытых вариантов осуществления без отступления от сущности и объема настоящего изобретения.
[0078] Следующие аспекты представляют примеры вариантов осуществления описанных способов и систем. Данный список аспектов не следует рассматривать, как ограничивающий, так как явно предполагаются другие варианты осуществления в рамках настоящего изобретения.
[0079] 1. Способ управления расходом и/или давлением нагнетаемой текучей среды, включающий в себя:
прием измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды;
определение режима управления для управления расходом и/или давлением, при этом определение режима управления включает в себя выбор режима управления из множества режимов управления на базе измеренного значения, и
управление расходом и/или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления, включая:
определение управляющего сигнала, передаваемого к полевому устройству, при этом полевое устройство соединено с линией, по которой течет нагнетаемая текучая среда, и
передачу управляющего сигнала к полевому устройству.
2. Способ согласно аспекту 1, в котором выбор режима управления из множества режимов управления включает в себя выбор режима управления из следующего:
режим управления основной задачей для поддержания пластового давления в пласте, причем нагнетаемая текучая среда нагнетается в пласт, и
режим управления задачей корректировки для понижения давления нагнетаемой текучей среды, так чтобы давление соответствовало пороговому значению или было ниже него.
3. Способ согласно аспекту 2, в котором измеренное значение показывает давление нагнетаемой текучей среды, при этом выбор одного из режимов, режима управления основной задачей или режима управления задачей корректировки, включает в себя:
если давление нагнетаемой текучей среды соответствует пороговому значению или находится ниже него, выбор режима управления основной задачей, и
если давление нагнетаемой текучей среды находится выше порогового значения, выбор режима управления задачей корректировки.
4. Способ согласно любому из предшествующих аспектов, в котором выбор режима управления из множества режимов управления включает в себя выбор режима управления из следующего:
режим управления основной задачей для поддержания пластового давления в пласте, причем нагнетаемая текучая среда нагнетается в пласт,
режим управления задачей корректировки для понижения давления нагнетаемой текучей среды, так чтобы давление соответствовало пороговому значению или было ниже него, и
режим управления при отсутствии потока для управления полевым устройством, когда расход нагнетаемой текучей среды падает ниже порогового значения расхода.
5. Способ согласно аспекту 4, в котором измеренное значение показывает расход нагнетаемой текучей среды, при этом выбор одного из режимов, режима управления основной задачей, режима управления задачей корректировки и режима управления при отсутствии потока, включает в себя:
если расход нагнетаемой текучей среды соответствует пороговому значению или находится ниже него, выбор режима управления при отсутствии потока, и
если расход нагнетаемой текучей среды выше порогового значения, выбор одного из режимов, режима управления основной задачей или режима управления задачей корректировки.
6. Способ согласно любому из предшествующих аспектов, в котором выбор режима управления из множества режимов управления включает в себя выбор режима управления из трех или более режимов управления.
7. Способ согласно аспекту 6, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления включает в себя управление расходом в соответствии с определенным заданным значением, соответствующим выбранному режиму управления, при этом определенное заданное значение отличается от множества других заданных значений, а каждое из множества других заданных значений соответствует одному из трех или более режимов управления, отличающихся от выбранного режима управления.
8. Способ согласно любому из предшествующих аспектов, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления включает в себя управление расходом в соответствии с определенным заданным значением, соответствующим выбранному режиму управления, при этом определенное заданное значение отличается от другого заданного значения, соответствующего одному из множества режимов управления, отличающемуся от выбранного режима управления.
9. Способ согласно любому из предшествующих аспектов, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления включает в себя управление расходом в соответствии с определенным набором параметров, соответствующих определенному механизму обратной связи контура управления для выбранного режима управления, при этом определенный набор параметров отличается от другого набора параметров, соответствующих другому механизму обратной связи контура управления одного из множества режимов управления, отличающихся от выбранного режима управления.
10. Способ согласно любому из предшествующих аспектов, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления включает в себя управление расходом или давлением нагнетаемой текучей среды с соответствии с выбранным режимом управления в течение заданного интервала времени, причем, принятое измеренное значение представляет собой начальное измеренное значение, и в котором выбранный режим управления представляет собой начальный режим управления, при этом способ дополнительно включает в себя:
после заданного интервала времени, прием последующего измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды, и
определение последующего режима управления для управления расходом и/или давлением, при этом определение последующего режима управления включает в себя выбор последующего режима управления из множества режимов управления на базе последующего измеренного значения.
11. Система управления технологическим процессом, содержащая:
устройство управления технологическим процессом, выполненное с возможностью управления нагнетанием текучей среды;
первый коммуникационный канал связи между устройством управления технологическим процессом и по меньшей мере одним из элементов, датчиком давления, определяющим давление текучей среды, и расходомером, определяющим расход текучей среды, и
второй коммуникационный канал связи между устройством управления технологическим процессом и полевым устройством, при этом устройство управления технологическим процессом обменивается данными с полевым устройством, чтобы управлять по меньшей мере одним из элементов, давлением или расходом текучей среды,
при этом устройство управления технологическим процессом выполнено с возможностью:
приема через первый коммуникационный канал связи измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды,
определения режима управления для управления расходом и/или давлением текучей среды, при этом определение режима управления включает в себя выбор режима управления из множества режимов управления на базе измеренного значения, и
управления через второй коммуникационный канал связи расходом и/или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления.
12. Система управления технологическим процессом согласно аспекту 11, в которой устройство управления технологическим процессом выполнено с возможностью управления нагнетанием текучей среды, на устье скважины, в пласт.
13. Система управления технологическим процессом согласно либо аспекту 11 или аспекту 12, в которой устройство управления технологическим процессом выполнено с возможностью управления нагнетанием текучей среды в кучу руды.
14. Система управления технологическим процессом согласно одному из аспектов 11-13, в которой устройство управления технологическим процессом и полевое устройство расположены на платформе, при этом платформа функционально связана с линией, по которой проходит текучая среда.
15. Система управления технологическим процессом согласно одному из аспектов 11-14, в которой:
полевое устройство является первым полевым устройством,
второй коммуникационный канал связи соединяет с обеспечением связи устройство управления технологическим процессом с первым полевым устройством и множеством других полевых устройств, и
устройство управления технологическим процессом связано через второй коммуникационный канал связи с первым полевым устройством и с множеством других полевых устройств для управления по меньшей мере одним из элементов, давлением или расходом текучей среды во множестве линий, отходящих от коллектора.
16. Система управления технологическим процессом согласно одному из аспектов 11-15, в которой управление расходом и/или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления включает в себя:
определение управляющего сигнала, передаваемого через второй коммуникационный канал связи к полевому устройству, и
передачу управляющего сигнала к полевому устройству.
17. Устройство управления технологическим процессом, содержащее:
один или более процессоров;
модуль передачи данных, выполненный с возможностью приема измеренного значения, показывающего давление или расход текучей среды;
модуль управления основной задачей, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления основной задачей вынуждает устройство управления технологическим процессом поддерживать пластовое давление в пласте на основании нагнетания текучей среды в пласт;
модуль управления задачей корректировки, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления задачей корректировки вынуждает устройство управления технологическим процессом уменьшать измеренное давление текучей среды до уровня порогового значения давления или ниже него;
переключатель режимов управления, выполненный с возможностью:
выбора модуля управления основной задачей или модуля управления задачей корректировки, на основе измеренного значения, и
принуждения одного или более процессоров исполнять выбранный модуль управления основной задачей или модуль управления задачей корректировки.
18. Устройство управления технологическим процессом согласно аспекту 17, дополнительно содержащее:
модуль управления при отсутствии потока, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления при отсутствии потока принуждает устройство управления технологическим процессом позиционировать клапан в заданном положении до тех пор, пока расход текучей среды не будет равен пороговому значению расхода или будет выше него,
при этом переключатель режимов управления дополнительно настроен, чтобы перед выбором модуля управления основной задачей или модуля управления задачей корректировки на основе измеренного значения выполнять:
определение того, находится ли расход текучей среды меньше, чем пороговое значение расхода, на основе измеренного значения,
если расход текучей среды меньше, чем пороговое значение расхода, принуждение одного или более процессоров исполнять модуль управления при отсутствии потока.
19. Устройство управления технологическим процессом согласно любому из аспектов 17 или 18, в котором модуль управления основной задачей включает в себя первый алгоритм пропорционально-интегрально-дифференциального (proportional-integral-derivative, PID) регулятора, конфигурированного с первыми параметрами, причем модуль управления задачей корректировки включает в себя второй алгоритм PID-регулятора, конфигурированный со вторыми параметрами, и при этом первые параметры первого алгоритма PID-регулятора отличаются от вторых параметров второго алгоритма PID-регулятора.
20. Устройство управления технологическим процессом согласно любому из аспектов 17-19, в котором модуль управления основной задачей принуждает устройство управления технологическим процессом поддерживать пластовое давление на основе первого заданного значения, при этом модуль управления задачей корректировки принуждает устройство управления технологическим процессом понижать измеренное давление на основе второго заданного значения, и при этом первое заданное значение отличается от второго заданного значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ОПТИМИЗАЦИИ ОПЕРАЦИЙ ДОБЫЧИ В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2502120C2 |
| УПРАВЛЕНИЕ ОПЕРАЦИЯМИ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776140C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ГАЗЛИФТНОЙ НЕФТЯНОЙ СКВАЖИНЫ, ГАЗЛИФТНАЯ НЕФТЯНАЯ СКВАЖИНА И СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ МНОГОФАЗНОЙ ТЕКУЧЕЙ СРЕДЫ В ГАЗЛИФТНОЙ НЕФТЯНОЙ СКВАЖИНЕ | 2001 |
|
RU2256067C2 |
| КОНТРОЛЛЕР БАЛАНСА В ПАРКЕ НАСОСОВ ПРИ ВЫПОЛНЕНИИ ОПЕРАЦИЙ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776144C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ КЛАПАНОМ | 2015 |
|
RU2690291C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПОЛЕВОГО ПРИБОРА И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2015 |
|
RU2698211C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ВСЕЙ УСТАНОВКОЙ И ЕЕ РЕГУЛИРОВАНИЕМ, А ТАКЖЕ СООТВЕТСТВУЮЩИЙ ЕЙ СПОСОБ | 2015 |
|
RU2674756C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ УСТАНОВКИ В СЕТИ "МАШИНА-МАШИНА" НА ОСНОВЕ OPC-UA | 2015 |
|
RU2674758C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2022 |
|
RU2808325C1 |
| ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА, СОДЕРЖАЩАЯ ФЛЮИД, И СПОСОБ СНИЖЕНИЯ ДАВЛЕНИЯ В НЕЙ | 2019 |
|
RU2753266C1 |
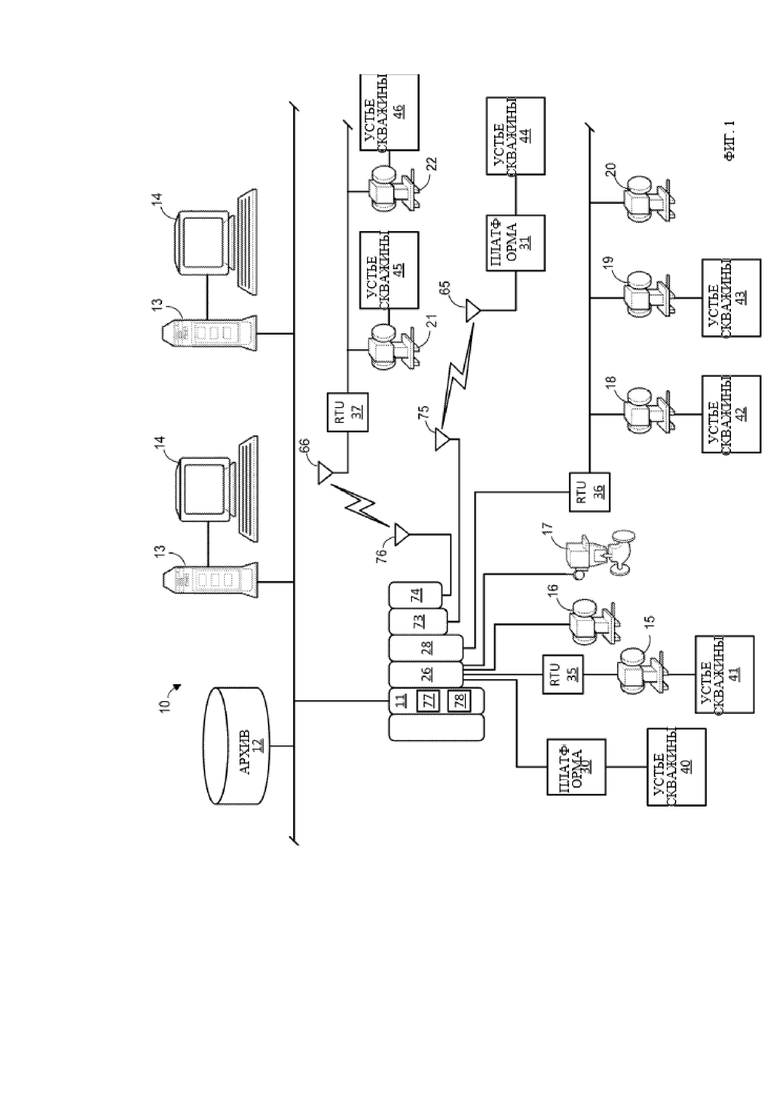

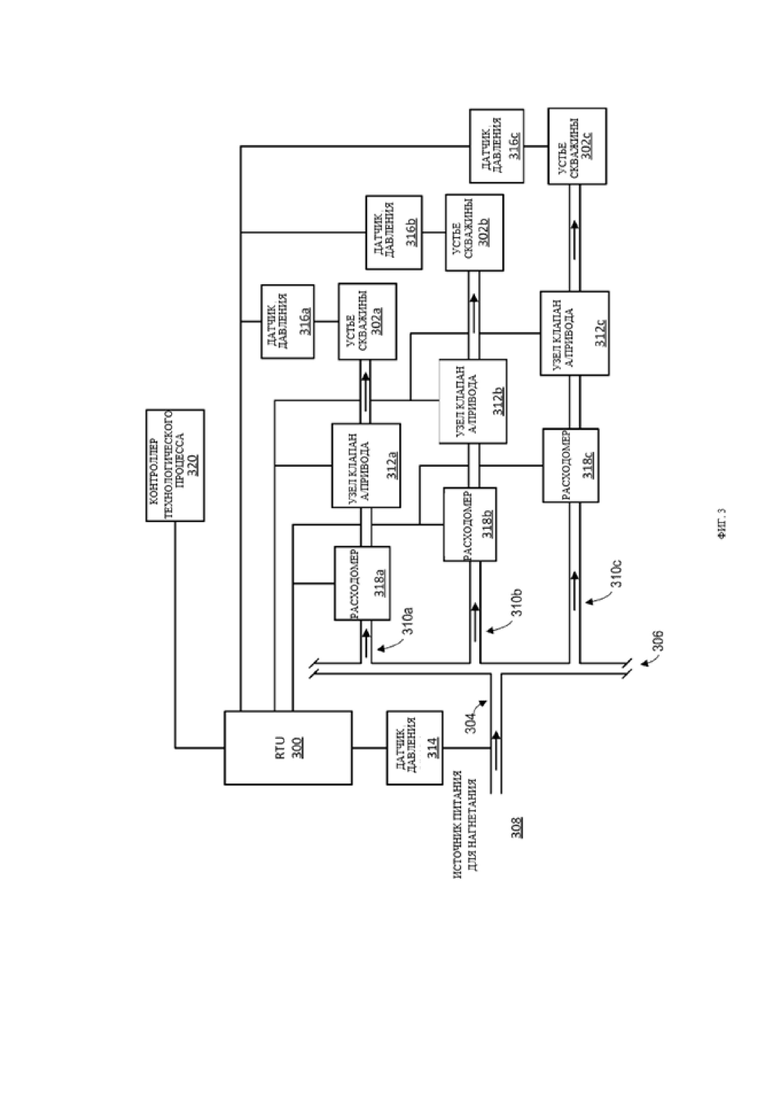

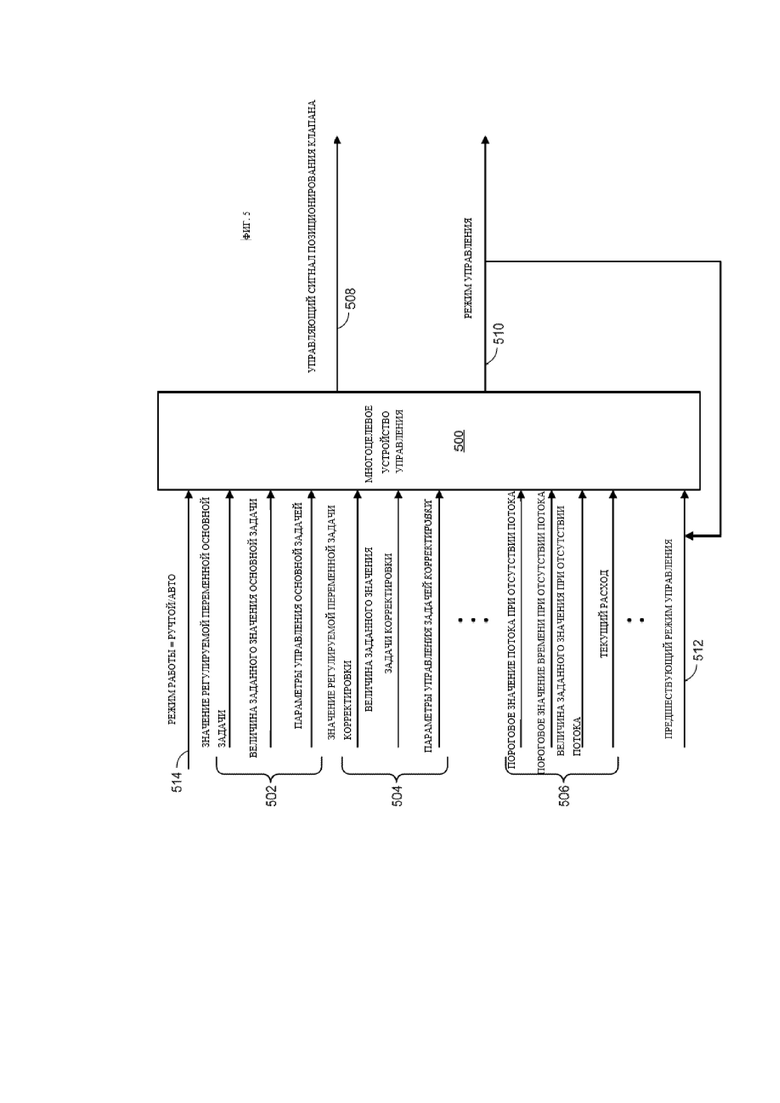




Изобретение относится к управлению расходом и/или давлением нагнетаемой текучей среды. Техническим результатом является согласованное управление нагнетанием текучей среды. Способ включает прием измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды, определение первого режима управления для управления расходом и/или давлением на уровне порогового значения, при этом определение первого режима управления включает в себя выбор первого режима управления из множества режимов управления на базе измеренного значения, причем первый режим управления реализован с использованием первого пропорционально-интегрально-производного (PID) контура управления, управление расходом и/или давлением нагнетаемой текучей среды в соответствии с первым режимом управления в течение первого периода времени, включая: определение первого управляющего сигнала, передаваемого к полевому устройству, при этом полевое устройство соединено с линией, по которой течет нагнетаемая текучая среда, и передачу первого управляющего сигнала к полевому устройству, определение второго режима управления для управления расходом и/или давлением с целью уменьшения давления нагнетаемой текучей среды до уровня ниже порогового значения, при этом определение второго режима управления включает в себя выбор второго режима управления из множества режимов управления на базе измеренного значения, причем второй режим управления реализован с использованием второго пропорционально-интегрально-производного (PID) контура управления, и управление расходом и/или давлением нагнетаемой текучей среды в соответствии со вторым режимом управления в течение второго периода времени, включая: определение второго управляющего сигнала, передаваемого к полевому устройству, и передачу второго управляющего сигнала к полевому устройству. 3 н. и 17 з.п. ф-лы, 9 ил.
1. Способ управления расходом и/или давлением нагнетаемой текучей среды, включающий в себя:
прием измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды;
определение первого режима управления для управления расходом и/или давлением на уровне порогового значения, при этом определение первого режима управления включает в себя выбор первого режима управления из множества режимов управления на базе измеренного значения, причем первый режим управления реализован с использованием первого пропорционально-интегрально-производного (PID) контура управления;
управление расходом и/или давлением нагнетаемой текучей среды в соответствии с первым режимом управления в течение первого периода времени, включая:
определение первого управляющего сигнала, передаваемого к полевому устройству, при этом полевое устройство соединено с линией, по которой течет нагнетаемая текучая среда, и
передачу первого управляющего сигнала к полевому устройству;
определение второго режима управления для управления расходом и/или давлением с целью уменьшения давления нагнетаемой текучей среды до уровня ниже порогового значения, при этом определение второго режима управления включает в себя выбор второго режима управления из множества режимов управления на базе измеренного значения, причем второй режим управления реализован с использованием второго пропорционально-интегрально-производного (PID) контура управления; и
управление расходом и/или давлением нагнетаемой текучей среды в соответствии со вторым режимом управления в течение второго периода времени, включая:
определение второго управляющего сигнала, передаваемого к полевому устройству, и
передачу второго управляющего сигнала к полевому устройству.
2. Способ по п. 1, в котором множество режимов управления включает в себя:
режим управления основной задачей для поддержания пластового давления в пласте, причем нагнетаемая текучая среда нагнетается в пласт, и
режим управления задачей корректировки для понижения давления нагнетаемой текучей среды, так чтобы давление было ниже порогового значения.
3. Способ по п. 2, в котором измеренное значение показывает давление нагнетаемой текучей среды и первый режим управления представляет собой режим управления основной задачей, а второй режим управления представляет собой режим управления задачей корректировки, при этом выбор одного из режимов, режима управления основной задачей или режима управления задачей корректировки, включает в себя:
если давление нагнетаемой текучей среды соответствует пороговому значению или находится ниже него, выбор режима управления основной задачей, и
если давление нагнетаемой текучей среды находится выше порогового значения, выбор режима управления задачей корректировки.
4. Способ по п. 1, в котором множество режимов управления включает в себя:
режим управления основной задачей для поддержания пластового давления в пласте, причем нагнетаемая текучая среда нагнетается в пласт,
режим управления задачей корректировки для понижения давления нагнетаемой текучей среды, так чтобы давление соответствовало пороговому значению или было ниже него, и
режим управления при отсутствии потока для управления полевым устройством, когда расход нагнетаемой текучей среды падает ниже порогового значения расхода.
5. Способ по п. 4, в котором измеренное значение показывает расход нагнетаемой текучей среды и первый режим управления представляет собой режим управления основной задачей, а второй режим управления представляет собой режим управления задачей корректировки, при этом выбор одного из режимов, режима управления основной задачей, режима управления задачей корректировки и режима управления при отсутствии потока, включает в себя:
выбор режима управления при отсутствии потока, если расход нагнетаемой текучей среды соответствует пороговому значению или находится ниже него, и
выбор одного из режимов, режима управления основной задачей или режима управления задачей корректировки, если расход нагнетаемой текучей среды выше порогового значения.
6. Способ по п. 1, в котором выбор первого и второго режимов управления из множества режимов управления включает в себя выбор первого и второго режимов управления из трех или более режимов управления.
7. Способ по п. 6, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с выбранным режимом управления включает в себя управление расходом в соответствии с определенным заданным значением, соответствующим выбранному режиму управления, при этом определенное заданное значение отличается от множества других заданных значений, а каждое из множества других заданных значений соответствует одному из трех или более режимов управления, отличающихся от первого или второго режима управления.
8. Способ по п. 1, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с первым и вторым режимами управления включает в себя управление расходом в соответствии с определенным заданным значением, соответствующим первому или второму режиму управления, при этом определенное заданное значение отличается от другого заданного значения, соответствующего одному из множества режимов управления, отличающихся от первого или второго режима управления.
9. Способ по п. 1, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с первым или вторым режимом управления включает в себя управление расходом в соответствии с определенным набором параметров, соответствующих определенному механизму обратной связи контура управления для первого или второго режима управления, при этом определенный набор параметров отличается от другого набора параметров, соответствующих другому механизму обратной связи контура управления одного из множества режимов управления, отличающегося от первого или второго режима управления.
10. Способ по п. 1, в котором управление расходом или давлением нагнетаемой текучей среды в соответствии с первым или вторым режимом управления включает в себя управление расходом или давлением нагнетаемой текучей среды в соответствии с первым или вторым режимом управления в течение заданного интервала времени, причем принятое измеренное значение представляет собой начальное измеренное значение, и в котором первый или второй режим управления представляет собой начальный режим управления, при этом способ дополнительно включает в себя:
после заданного интервала времени прием последующего измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды, и
определение последующего режима управления для управления расходом и/или давлением, при этом определение последующего режима управления включает в себя выбор последующего режима управления из множества режимов управления на базе последующего измеренного значения.
11. Система управления технологическим процессом, содержащая:
устройство управления технологическим процессом, выполненное с возможностью управления нагнетанием текучей среды;
первый коммуникационный канал связи между устройством управления технологическим процессом и по меньшей мере одним из элементов, датчиком давления, определяющим давление текучей среды, и расходомером, определяющим расход текучей среды, и
второй коммуникационный канал связи между устройством управления технологическим процессом и полевым устройством, при этом устройство управления технологическим процессом обменивается данными с полевым устройством, чтобы управлять по меньшей мере одним из элементов, давлением или расходом текучей среды,
при этом устройство управления технологическим процессом выполнено с возможностью:
приема через первый коммуникационный канал связи измеренного значения, показывающего расход и/или давление нагнетаемой текучей среды,
определения первого режима управления для управления расходом и/или давлением текучей среды, при этом определение первого режима управления включает в себя выбор первого режима управления из множества режимов управления на базе измеренного значения, причем первый режим управления реализован с использованием первого пропорционально-интегрально-производного (PID) контура управления,
управления через второй коммуникационный канал связи расходом и/или давлением нагнетаемой текучей среды на уровне порогового значения в течение первого периода времени в соответствии с первым режимом управления,
определения второго режима управления для управления расходом и/или давлением текучей среды, при этом определение второго режима управления включает в себя выбор второго режима управления из множества режимов управления на базе измеренного значения, причем второй режим управления реализован с использованием второго пропорционально-интегрально-производного (PID) контура управления, и
управления через второй коммуникационный канал расходом и/или давлением нагнетаемой текучей среды на уровне ниже порогового значения в течение второго периода времени в соответствии со вторым режимом управления.
12. Система управления технологическим процессом по п. 11, в которой устройство управления технологическим процессом выполнено с возможностью управления нагнетанием текучей среды, на устье скважины, в пласт.
13. Система управления технологическим процессом по п. 11, в которой устройство управления технологическим процессом выполнено с возможностью управления нагнетанием текучей среды в кучу руды.
14. Система управления технологическим процессом по п. 11, в которой устройство управления технологическим процессом и полевое устройство расположены на платформе, при этом платформа функционально связана с линией, по которой проходит текучая среда.
15. Система управления технологическим процессом по п. 11, в которой:
полевое устройство является первым полевым устройством,
второй коммуникационный канал связи соединяет с обеспечением связи устройство управления технологическим процессом с первым полевым устройством и множеством других полевых устройств, и
устройство управления технологическим процессом связано через второй коммуникационный канал связи с первым полевым устройством и с множеством других полевых устройств для управления по меньшей мере одним из элементов, давлением или расходом текучей среды во множестве линий, отходящих от коллектора.
16. Система управления технологическим процессом по п. 11, в которой управление расходом и/или давлением нагнетаемой текучей среды в соответствии с первым или вторым режимом управления включает в себя:
определение управляющего сигнала, передаваемого через второй коммуникационный канал связи к полевому устройству, и
передачу управляющего сигнала к полевому устройству.
17. Устройство управления технологическим процессом, содержащее:
один или более процессоров;
модуль передачи данных, выполненный с возможностью приема измеренного значения, показывающего давление или расход текучей среды;
модуль управления основной задачей, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления основной задачей принуждает устройство управления технологическим процессом поддерживать пластовое давление в пласте на пороговом значении давления на основании нагнетания текучей среды в пласт в течение первого периода времени посредством реализации первого пропорционально-интегрально-производного (PID) контура управления;
модуль управления задачей корректировки, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления задачей корректировки принуждает устройство управления технологическим процессом уменьшать измеренное давление текучей среды до уровня ниже порогового значения давления в течение второго периода времени посредством реализации второго пропорционально-интегрально-производного (PID) контура управления;
переключатель режимов управления, выполненный с возможностью:
выбора модуля управления основной задачей или модуля управления задачей корректировки, на основе измеренного значения, и
принуждения одного или более процессоров исполнять модуль управления основной задачей в течение первого периода времени и модуль управления задачей корректировки в течение второго периода времени.
18. Устройство управления технологическим процессом по п. 17, дополнительно содержащее:
модуль управления при отсутствии потока, специально настраивающий устройство управления технологическим процессом таким образом, что при исполнении одним или более процессоров, модуль управления при отсутствии потока принуждает устройство управления технологическим процессом позиционировать клапан в заданном положении до тех пор, пока расход текучей среды не будет равен пороговому значению расхода или будет выше него,
при этом переключатель режимов управления дополнительно настроен, чтобы перед выбором модуля управления основной задачей или модуля управления задачей корректировки на основе измеренного значения выполнять:
определение того, находится ли расход текучей среды меньше, чем пороговое значение расхода, на основе измеренного значения,
если расход текучей среды меньше, чем пороговое значение расхода, принуждение одного или более процессоров исполнять модуль управления при отсутствии потока.
19. Устройство управления технологическим процессом по п. 17, в котором модуль управления основной задачей включает в себя первый алгоритм пропорционально-интегрально-дифференциального регулятора, конфигурированного с первыми параметрами, причем модуль управления задачей корректировки включает в себя второй алгоритм пропорционально-интегрально-дифференциального регулятора, конфигурированный со вторыми параметрами, и при этом первые параметры первого алгоритма пропорционально-интегрально-дифференциального регулятора отличаются от вторых параметров второго алгоритма пропорционально-интегрально-дифференциального регулятора.
20. Устройство управления технологическим процессом по п. 17, в котором модуль управления основной задачей принуждает устройство управления технологическим процессом поддерживать пластовое давление на основе первого заданного значения, при этом модуль управления задачей корректировки принуждает устройство управления технологическим процессом понижать измеренное давление на основе второго заданного значения и при этом первое заданное значение отличается от второго заданного значения.
| US 20080009978 A1, 10.01.2008 | |||
| US 20140034164 А1, 06.02.2014 | |||
| US 4721158 A1, 26.01.1988 | |||
| CN 203147285 U, 21.08.2013 | |||
| US 20070276545 A1, 29.11.2007. |

