Изобретение относится к перемешивающим устройствам, применяемым в пищевой, медицинской, химической и строительной отраслях промышленности, а также в сельском хозяйстве с целью смешивания различных материалов, приготовления однородных сред и выравнивания концентрации перемешиваемых веществ по всему объему.
Известна мешалка (SU №863378, МПК В28С 5/16, опубл. 15.09.81), выполненная в виде одноподвижного пространственного пятизвенного рычажного механизма с пятью вращательными шарнирами. Недостаток такого устройства заключается в высоких требованиях точности расположения его вращательных шарниров. Недостаток также заключается в том, что продольная ось вала с перемешивающими лопастями проходит через центр вращательного шарнира, что существенно усложняет конструкцию механизма.
Известен также пространственный смесительный механизм (RU №2484886, МПК B01F 13/00, опубл. 20.06.2013), включающий ведущее звено, шатун и коромысло с перемешивающим элементом. Недостаток данного устройства состоит в том, что ведущее звено входит в двухподвижную цилиндрическую пару с гидроцилиндром, установленным на стойке. Для увеличения амплитуды смещения перемешивающего элемента требуется увеличение хода ведущего звена, что может привести к заклиниванию звеньев механизма. Недостаток заключается также в том, что перемешивающий элемент установлен на коромысле, которое совершает незначительные качания, что снижает эффективность использования данного механизма для перемешивающих операций.
Наиболее близким к предлагаемому механизму является устройство для перемешивания (RU №2478473 МПК В28С 5/16, опубл. 10.04.2013), включающий стойку, кривошип, шатун, гайку, винт с перемешивающим элементом, а также кулису и камень. Звенья приводятся в движение от единственного двигателя. Все звенья соединены между собой кинематическими парами пятого класса. Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в установке дополнительных звеньев в виде кулисы и камня, которые содержат две поступательных кинематических пары. Наличие данных пар в цепи механизма при пространственном движении винта относительно гайки может привести к заклиниванию его звеньев.
Техническая проблема заключается в создании такого смесительного механизма, в котором сложное движение выходного звена реализовывалось бы без установки дополнительных звеньев в виде кулисы и камня, а также отсутствовали бы поступательные кинематические пары.
Решение технической проблемы заключается в том, что предложен винторычажный смесительный механизм включающий стойку, кривошип и шатун, соединенные между собой вращательными кинематическими парами, винт с жестко установленными на нем лопастями и гайку, входящие между собой в винтовую кинематическую пару, согласно изобретению, гайка образует со стойкой вращательную кинематическую пару, а шатун входит с винтом во вращательную кинематическую пару, причем оси вращательных пар звеньев гайка-стойка и шатун-винт выполнены перпендикулярными, а оси вращательных пар звеньев кривошип-шатун и винт-шатун выполнены перекрещивающимися.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в упрощении кинематической схемы механизма прототипа путем исключения дополнительных звеньев в виде кулисы и камня, а также поступательных кинематических пар. Это позволит повысить надежность функционирования предлагаемого механизма, устранив возможность заклинивания звеньев в поступательных кинематических парах. Уменьшение числа звеньев позволит упростить конструкцию механизма и также повысить его надежность.
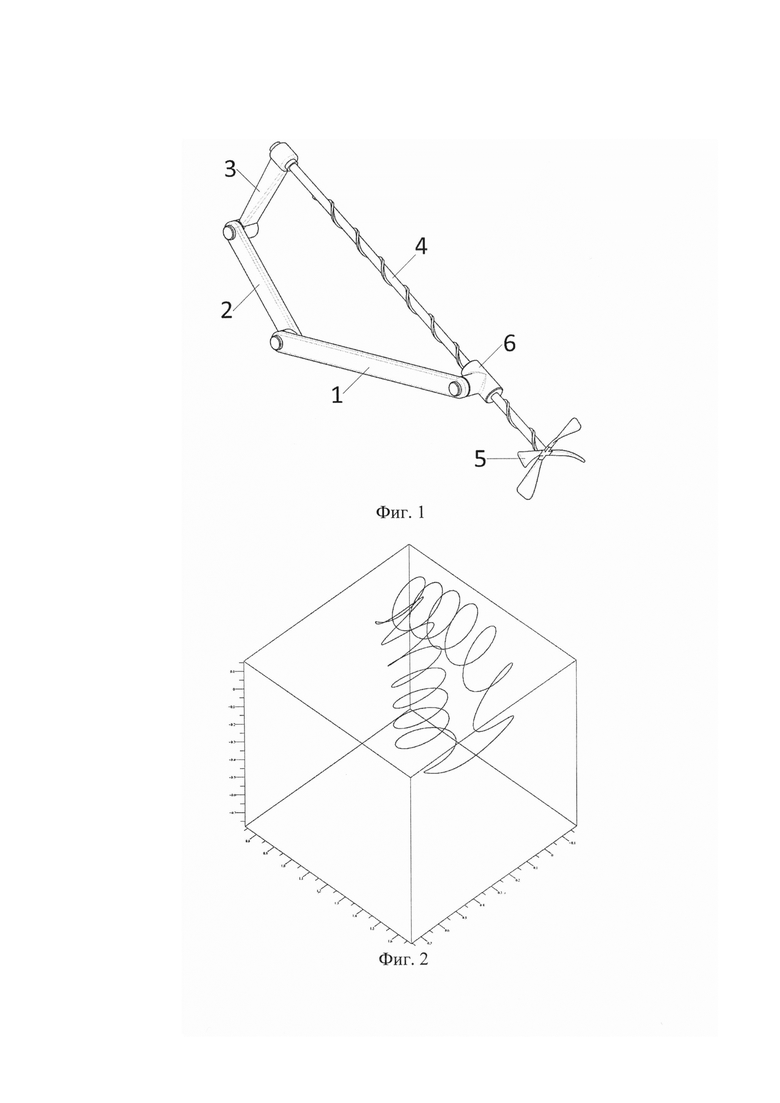
Предлагаемое изобретение поясняется чертежом, где на фиг. 1 показан винторычажный смесительный механизм, на фиг. 2 показана пространственная траектория движения выходного звена, винта с лопастями, смесительного механизма.
Винторычажный смесительный механизм состоит из стойки 1, кривошипа 2, шатуна 3, винта 4, на конце которого жестко установлены лопасти 5, и гайки 6. Кинематические пары звеньев 1-2 (стойка-кривошип), 2-3 (кривошип-шатун), 3-4 (шатун-винт) и 1-6 (стойка-гайка) выполнены вращательными, а пара звеньев 4-6 (винт-гайка) выполнена винтовой. Причем геометрические оси пар звеньев 1-2 (стойка-кривошип), 2-3 (кривошип-шатун) и 1-6 (стойка-гайка) параллельны друг другу, а геометрические оси пар звеньев 3-4 (шатун-винт) и 4-6 (винт-гайка) расположены на оси винта 4. Оси вращательных пар звеньев 6-1 (гайка-стойка) и 3-4 (шатун-винт) выполнены перпендикулярными, а оси вращательных пар звеньев 2-3 (кривошип-шатун) и 4-3 (винт-шатун) выполнены перекрещивающимися.
Механизм включает четыре подвижных звена (n=4) и пять кинематических пар пятого класса (p5=5). При данных параметрах его подвижность определится, как
W2=4n-3p5=16-15=1,
что доказывает необходимость установки единственного привода для получения определенного движения всех звеньев механизма.
Принцип работы механизма заключается в следующем. При вращении кривошипа 2, движение передается на шатун 3, который принуждает винт 4 вкручиваться в гайку 6 за счет того, что длина между парами звеньев 3-4 и 4-6 является переменной. Таким образом, винт 4 с жестко установленными на нем лопастями 5 совершают кроме вращения вокруг оси винта также и смещения и поворот в плоскости движения звеньев 1, 2, 3 и 6. Показанная на фиг. 2 траектория движения лопастей 5 получена численными методами в соответствии с принятыми размерами звеньев механизма. Траектория может быть изменена за счет выбора иных размеров звеньев механизма.
Предлагаемый механизм имеет минимальное число звеньев и единственный привод, при этом он реализует сложное пространственное движение выходного звена. Минимальное число звеньев обеспечивает простоту конструкции механизма и повышает надежность его функционирования. Применение данного механизма целесообразно для выполнения различных операций, связанных с перемешиванием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1994 |
|
RU2067535C1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1999 |
|
RU2162016C2 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ ЗАХВАТА, УДЕРЖАНИЯ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 2018 |
|
RU2689270C1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ ВЫХОДНЫМИ ЗВЕНЬЯМИ | 2018 |
|
RU2677948C1 |
Изобретение относится к перемешивающим устройствам, применяемым в пищевой, медицинской, химической и строительной отраслях промышленности, а также в сельском хозяйстве с целью смешивания различных материалов, приготовления однородных сред и выравнивания концентрации перемешиваемых веществ по всему объему. Винторычажный смесительный механизм включает стойку, кривошип и шатун, соединенные между собой вращательными кинематическими парами, винт с жестко установленными на нем лопастями и гайку, входящие между собой в винтовую кинематическую пару, гайка образует со стойкой вращательную кинематическую пару, а шатун входит с винтом во вращательную кинематическую пару, причем оси вращательных пар звеньев гайка-стойка и шатун-винт выполнены перпендикулярными, а оси вращательных пар звеньев кривошип-шатун и винт-шатун выполнены перекрещивающимися. Механизм имеет минимальное число звеньев и единственный привод, при этом он реализует сложное пространственное движение выходного звена. Изобретение обеспечивает смесительный механизм, в котором сложное движение выходного звена реализуется без установки дополнительных звеньев в виде кулисы и камня, а также отсутствуют поступательные кинематические пары. 2 ил.
Винторычажный смесительный механизм, включающий стойку, кривошип и шатун, соединенные между собой вращательными кинематическими парами, винт с жестко установленными на нем лопастями и гайку, входящие между собой в винтовую кинематическую пару, отличающийся тем, что гайка образует со стойкой вращательную кинематическую пару, а шатун входит с винтом во вращательную кинематическую пару, причем оси вращательных пар звеньев гайка-стойка и шатун-винт выполнены перпендикулярными, а оси вращательных пар звеньев кривошип-шатун и винт-шатун выполнены перекрещивающимися.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| Мешалка | 1979 |
|
SU863378A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| US 3602485 A1, 31.08.1971 | |||
| WO 1993018656 A1, 30.09.1993. | |||

